Изобретение относится к измерительной технике, в частности, к способу обеспечения температурной стабильности параметров молекулярно-электронных преобразователей, используемых в линейных и угловых акселерометрах. Это изобретение может найти применение в сейсмодатчиках, датчиках для стабилизации движущихся объектов и систем инерциальной навигации, акселерометрах и гидрофонах высокой стабильности и точности.
Наиболее распространенная. конструкция молекулярно-электронного преобразователя механического движения в электрический сигнал включает четыре электрода, помещенные в замкнутый контур, заполненный электролитом, при этом внутренние электроды служат катодами, а периферийные - анодами.
При подключении электродов молекулярно-электронного преобразователя к электронике, аноды находятся при потенциале на 250-300 мВ более высоком, чем катоды. В этом случае концентрация активного компонента (ионов три-йодида) в покоящейся жидкости на анодах приблизительно равна объемному значению, а на катодах - близка к нулю.
Фоновые катодные токи в этом случае определяются скоростью подвода реагирующего активного компонента к электродам. В неподвижной жидкости перенос активных носителей осуществляется по диффузионному механизму, поэтому фоновые катодные токи зависят от градиента концентрации активного компонента в областях между анодами и катодами, а также коэффициента диффузии активных носителей, согласно выражению:

Здесь D - коэффициент диффузии, S - площадь соответствующего катода,  - градиент концентрации активного компонента на поверхности соответствующего катода (прикатодный градиент концентрации).
- градиент концентрации активного компонента на поверхности соответствующего катода (прикатодный градиент концентрации).
При наличии внешних механических возмущений, жидкость перетекает через молекулярно-электронный преобразователь, и дополнительно к диффузионному, действует конвективный перенос носителей, увеличивающий или уменьшающий, в зависимости от направления гидродинамического потока, катодные токи. Известно, что коэффициент преобразования механического сигнала в электрический катодный ток в молекулярно-электронном преобразователе зависит от скорости гидродинамического потока, градиента концентрации активных ионов в прикатодном пространстве, коэффициента диффузии активных ионов.
Параметры молекулярно-электронного преобразователя изменяются с температурой, что обуславливается температурными изменениями вязкости жидкости и коэффициента диффузии. С падением температуры вязкость увеличивается. Соответственно, уменьшается скорость течения жидкости при фиксированном воздействии. Одновременно уменьшается коэффициент диффузии. Соответственно, уменьшаются размеры области в объеме электролита, из которой носители успевают достичь электродов за время изменения механического сигнала. Оба эффекта приводят к падению коэффициента преобразования при снижении температуры. В частности, в диапазоне от -40°С до +65°С падение может составить до 100 раз.
До недавнего времени применение молекулярно-электронных преобразователей ограничивалось регистрацией низкочастотных сигналов. В последние годы удалось расширить рабочий частотный диапазон до 500 Гц. Для высоких частот температурная нестабильность параметров проявляет себя в наибольшей степени.
Известен способ температурной компенсации, основанный на использовании в качестве корректирующего элемента молекулярно-электронный преобразователь, аналогичного рабочему («Введение в молекулярную электронику» под ред., Н.С. Лидоренко, М.: Энергоатомиздат, 1984 г., с. 267). При этом внешний сигнал действует на рабочий преобразователь, а температурным воздействиям окружающей среды подвержены оба преобразователя в равной степени. Температурные изменения выходного сигнала уменьшаются благодаря включению преобразователей в смежные плечи мостовой схемы. Выходной сигнал в этом случае пропорционален разности сигналов рабочего и корректирующего преобразователей. Недостатком решения является его высокая стоимость и низкая точность компенсации для высоких частот.
Для уменьшения температурной погрешности преобразования может быть использован способ, который заключается в подключении указанного преобразователя к электронике, содержащей корректирующие цепи с терморезисторами / V.G. Krishtop, "Experimental modeling of the temperature dependence of the transfer function of rotational motion sensors based on electrochemical transducers," Russ. J. Electrochem., vol. 50, no. 4, pp. 350-354, 2014/. При изменении температуры окружающей среды изменение сопротивления терморезистора корректирует коэффициент преобразования. Основной недостаток использования корректирующих цепей заключается в том, что методами температурной коррекции достаточно сложно парировать падение коэффициента преобразования при изменении температуры во всем рабочем частотном диапазоне, требуется усложнение электроники, увеличение количества используемых компонент в сопутствующей электронике; что увеличивает шумы измерительного тракта. Кроме того, с изменением температуры, усиление по каскадам блока электроники оказывается распределено неоптимальным образом, что также увеличивает шумы.
В патенте /RU 2374652 С2/ предложен способ стабилизации параметров молекулярно-электронного преобразователя, основанный на размещении в корпусе преобразующего элемента, на расстоянии 1-10 см от молекулярно-электронного преобразователя, дополнительных электродов, находящихся при потенциале на 100-500 мВ выше потенциала катодов, при этом аноды подключают к источнику стабилизированного постоянного тока, в результате чего концентрация электролита на катодах близка к нулю, на дополнительных электродах определяется объемной концентрацией, а на анодах устанавливают такой, чтобы обеспечить протекание тока, генерируемого источником тока между анодом и катодом. Такой подход обеспечивает высокую временную стабильность параметров преобразователя. Однако, указанное техническое решение не обеспечивает температурную стабильность выходных параметров и требует использования дополнительных цепей коррекции.
Существенного улучшения температурной стабильности выходных параметров молекулярно-электронного преобразователя можно добиться при использовании электродинамическая обратная связь. Передаточная функция прибора с обратной связью имеет вид:

При выполнении условия  справедливо упрощение
справедливо упрощение  и выходной сигнал перестает зависеть от свойств преобразующего элемента, в том числе, от их изменений с температурой. Однако, как показано в /I.V Egorov, A.S. Shabalina, and V.М. Agafonov, "Design and Self-Noise of MET Closed-Loop Seismic Accelerometers," IEEE Sens. J., vol. 17, no. 7, pp. 2008-2014, 2017/, условие перестает выполняться для частот выше, приблизительно 50 Гц. На более высоких частотах требуется разработка дополнительных корректирующих цепей. Таким образом, техническое решение, связанное с использованием обратной связи, не снимает необходимости термоконпенсировать выходной сигнал средствами электроники, что приводит к увеличению собственного шума конечного устройства и усложнению схемы сопутствующей электроники.
и выходной сигнал перестает зависеть от свойств преобразующего элемента, в том числе, от их изменений с температурой. Однако, как показано в /I.V Egorov, A.S. Shabalina, and V.М. Agafonov, "Design and Self-Noise of MET Closed-Loop Seismic Accelerometers," IEEE Sens. J., vol. 17, no. 7, pp. 2008-2014, 2017/, условие перестает выполняться для частот выше, приблизительно 50 Гц. На более высоких частотах требуется разработка дополнительных корректирующих цепей. Таким образом, техническое решение, связанное с использованием обратной связи, не снимает необходимости термоконпенсировать выходной сигнал средствами электроники, что приводит к увеличению собственного шума конечного устройства и усложнению схемы сопутствующей электроники.
Задачей предлагаемого технического решения является обеспечение температурной стабильности характеристик молекулярно-электронного преобразователя без использования сложных частотно-зависимых цепей термокомпенсации.
Наиболее близким аналогом и прототипом предлагаемого в патенте технического решения является техническое решение, предложенное в /RU 2374652 С2/, в сочетании с использованием электродинамической обратной связи.
Технический результат, достигаемый предлагаемым изобретением, заключается в обеспечении точности измерения молекулярно-электронными преобразователями угловых и линейных движений и акустических сигналов в широком температурном диапазоне.
В предлагаемом изобретении задача решена за счет того, что фоновый ток, протекающий через катоды преобразующего элемента, управляется специально разработанной электронной цепью в зависимости от температуры окружающей среды. Для этого в рабочей жидкости преобразователя на расстоянии от 2 до 50 мм от анодов устанавливают дополнительные электроды, находящиеся при потенциале на 100-500 мВ выше потенциала катодов, а через аноды пропускается ток, величина которого зависит от температуры по определенному закону. Действие тока, проходящего через аноды, состоит в управляемом температурой изменении анодной концентрации, которая повышается при увеличении тока и уменьшается в обратном случае.
В свою очередь, величина анодной концентрации определяет градиент концентрации вблизи катодов, а, следовательно, коэффициент преобразования. При этом температурная зависимость тока, пропускаемого через катоды, подбирается таким, что изменение градиента концентрации в прикатодной области компенсировало температурные изменения чувствительности в области высоких, более 50 Герц, частот, обусловленные изменением коэффициента диффузии и вязкости в рабочей жидкости. Дополнительно, стабилизация температурных изменений в области частот менее 50 Гц, осуществляется с использованием механизма обратной связи.
Другими отличиями предлагаемого способа являются:
- применение описанного способа стабилизации параметров преобразующего элемента в широком диапазоне температур при создании сейсмических датчиков скорости;
- применение описанного способа стабилизации параметров преобразующего элемента в широком диапазоне температур при создании сейсмических датчиков ускорения;
- применение описанного способа стабилизации параметров преобразующего элемента в широком диапазоне температур при создании гидрофонов;
- использование в качестве дополнительных электродов сетки из платины или платиноиридиевого сплава с шагом 100-500 мкм;
- использование в качестве дополнительных электродов прямой или изогнутой проволоки из платины или платиноиридиевого сплава диаметром 100-200 мкм;
- использование в качестве дополнительных электродов пластины из диэлектрического материала, на которой нанесена пленка толщиной от 0.1 до 300 микрон содержащая платину, или платиноиридиевый сплав, или углерод;
- создание управляемого температурой тока с помощью электронной схемы,, представляющей собой известную из современного уровня техники схему источника тока, выходной ток которой задается выражением  где
где  - стабильное опорное напряжение, R(T) - сопротивление электронной цепи, содержащей хотя бы один терморезистор, R и r - постоянные резисторы;
- стабильное опорное напряжение, R(T) - сопротивление электронной цепи, содержащей хотя бы один терморезистор, R и r - постоянные резисторы;
- создание управляемого температурой тока с помощью электронной схемы, представляющей собой известную из современного уровня техники схему источника тока, выходной ток которой задается выражением  где
где  - стабильное опорное напряжение, R(T) - сопротивление электронной цепи, содержащей хотя бы один терморезистор.
- стабильное опорное напряжение, R(T) - сопротивление электронной цепи, содержащей хотя бы один терморезистор.
Для более детального пояснения предложенного способа, рассмотрим случай, когда внешним сигналом является линейная колебательная скорость. Все полученные результаты, касающиеся температурной зависимости параметров полностью применимы, если внешними сигналами являются угловая колебательная скорость, линейное или угловое ускорение (акселерометр) или давление (гидрофон или микрофон). Преобразование сигнала в электрический ток состоит из двух ступеней: а) преобразование внешней колебательной скорости в поток жидкости через преобразователь (определяется свойствами механической подсистемы), б) преобразование потока жидкости в ток на электродах преобразователя (определяется свойствами электрохимической подсистемы). Тогда АЧХ датчика может быть определена следующим образом:

где Wmech, Wel-ch - АЧХ механической и электрохимической подсистем соответственно.
Для механической системы можно использовать выражение для АЧХ осциллятора с демпфированием, которое в случае жидкостной инерциальной массы и высокого гидродинамического сопротивления преобразующего элемента имеет вид /D.A. Chikishev, D.L. Zaitsev, K.S. Belotelov, and I.V Egorov, "The Temperature Dependence of Amplitude-Frequency Response of the MET Sensor of Linear Motion in a Broad Frequency Range," IEEE Sens. J., vol. 19, no. 21, pp. 9653-9661, 2019/:


где Q - создаваемый измеряемым механическим сигналом объемный поток жидкости через преобразователь, V - измеряемый сигнал, А0 - постоянный коэффициент. L - длина канала, SCH - площадь канала, ρ - плотность электролита.  - гидродинамическое сопротивление преобразователя. В частном случае, когда в качестве упругого элемента используются гибкие мембраны, α - объемная жесткость мембраны,
- гидродинамическое сопротивление преобразователя. В частном случае, когда в качестве упругого элемента используются гибкие мембраны, α - объемная жесткость мембраны,  где Δp - это разность давлений с двух сторон мембраны, при условии протекания объема рабочей жидкости ΔV через узел, коэффициент 2 показывает, что используется 2 мембраны,
где Δp - это разность давлений с двух сторон мембраны, при условии протекания объема рабочей жидкости ΔV через узел, коэффициент 2 показывает, что используется 2 мембраны, 
 - эффективная площадь мембраны.
- эффективная площадь мембраны.
Для практических параметров системы обе характерные частоты механической системы расположены в диапазоне от нескольких десятков до 100 Герц.
АЧХ электрохимической системы зависит от геометрии и способа изготовления электрохимической ячейки. В настоящее время электродные узлы для практических МЭП изготавливаются из платиновой сетки. Все большее распространение получают конфигурации планарного типа, изготавливаемые по микроэлектронным технологиям, а также с применением технологий лазерного микрофрезерования.
В случае сеточных электродов в работах / V.М. Agafonov and V.G. Krishtop, "Diffusion sensor of mechanical signals: Frequency response at high frequencies," Russ. J. Electrochem., vol. 40, no. 5, pp. 537-541, 2004/ показано, что для практических вычислений передаточной функции электрохимической системы МЭП на частотах выше нескольких Герц можно воспользоваться зависимостью следующего вида:

параметр А не зависит от частоты и температуры и определяется геометрией электродной системы,  - градиент стационарной концентрации активных носителей в направлении интегрального потока жидкости. D - коэффициент диффузии активных ионов. Для преобразующей ячейки с планарной геометрией аналитическое выражение пока не получено, однако экспериментальные данные подтверждают качественное поведение Wel-ch, подобное (5) /V.М. Agafonov and V.G. Krishtop, "Diffusion sensor of mechanical signals: Frequency response at high frequencies," Russ. J. Electrochem., vol. 40, no. 5, pp. 537-541, 2004./.
- градиент стационарной концентрации активных носителей в направлении интегрального потока жидкости. D - коэффициент диффузии активных ионов. Для преобразующей ячейки с планарной геометрией аналитическое выражение пока не получено, однако экспериментальные данные подтверждают качественное поведение Wel-ch, подобное (5) /V.М. Agafonov and V.G. Krishtop, "Diffusion sensor of mechanical signals: Frequency response at high frequencies," Russ. J. Electrochem., vol. 40, no. 5, pp. 537-541, 2004./.
Температурная зависимость поведения АЧХ молекулярно-электронных датчиков определяются поведением коэффициента диффузии и вязкостью /Chikishev, D.A., Zaitsev, D.L., Belotelov, K.S., Egorov, I.V. The temperature dependence of amplitude- frequency response of the MET sensor of linear motion in a broad frequency range (2019) IEEE Sensors Journal, 19 (21), статья №8758914, pp. 9653-9661/.
На высоких частотах, т.е. при условии ω>>ωmech,2 отклик механической системы не зависит ни от частоты, ни от температуры и все зависимости определяются выражением (5).
С другой стороны, градиент стационарной концентрации активных носителесвязан со стационарным током протекающим между анодами и катодами следующим выражением:  В - зависящий от геометрии коэффициент, I - ток, создаваемый электронной схемой. Подставляя
В - зависящий от геометрии коэффициент, I - ток, создаваемый электронной схемой. Подставляя  в (5) можно видеть, что температурная зависимость будет полностью компенсирована, если ток будет изменяться также, как обратный квадратный корень из коэффициента диффузии.
в (5) можно видеть, что температурная зависимость будет полностью компенсирована, если ток будет изменяться также, как обратный квадратный корень из коэффициента диффузии. 
Краткое описание чертежей.
На фиг. 1 схематически изображена схема подключения электроники к электродам преобразующего элемента, соответствующая примеру реализации.
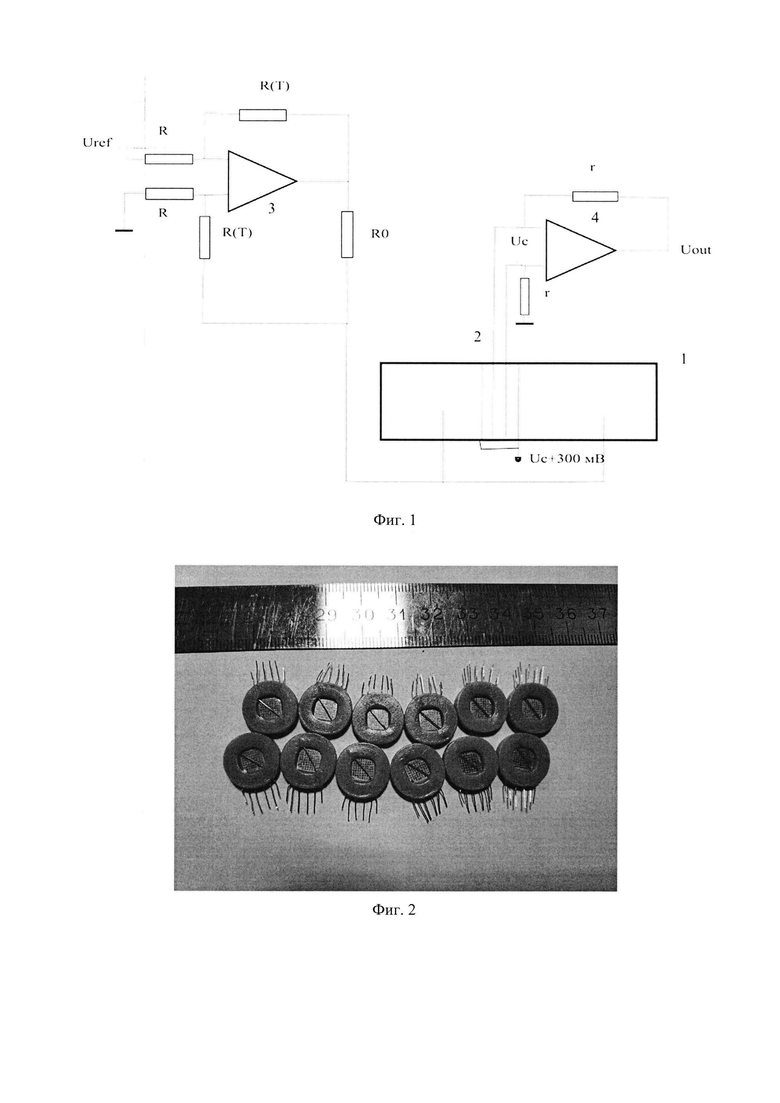
На фиг. 2 показаны образцы молекулярно-электродного преобразующего элемента, содержащего две пары анод-катод и дополнительные электроды
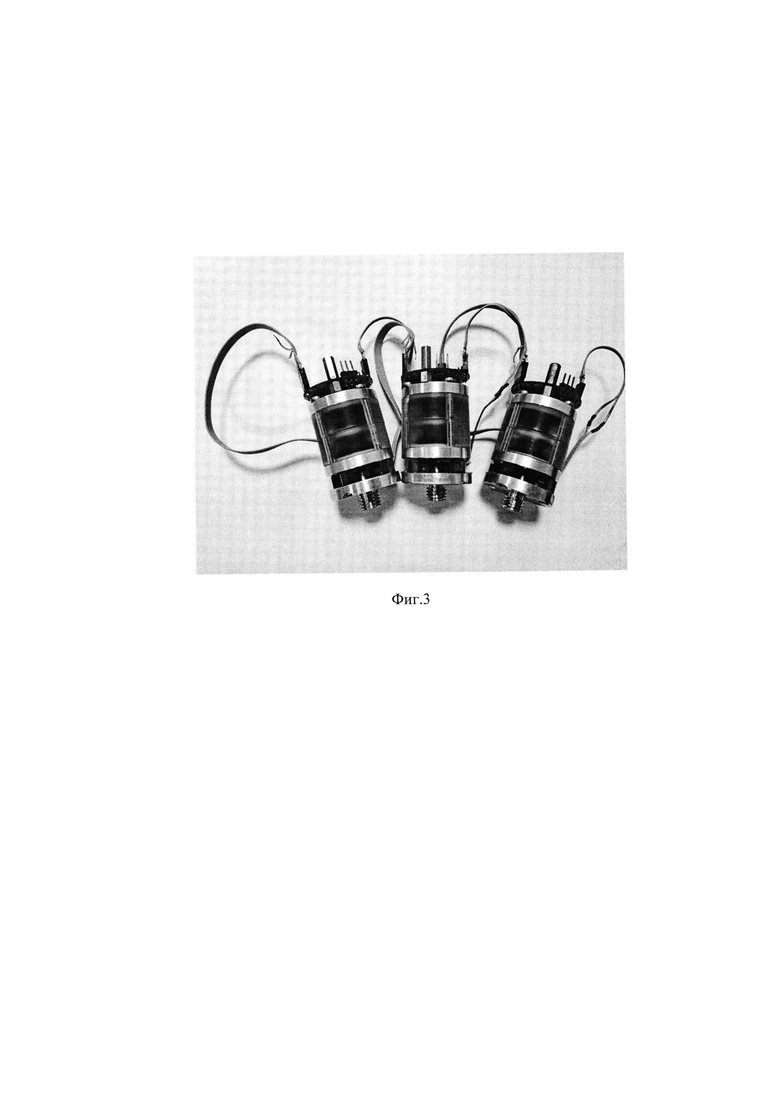
На фиг. 3 показаны образцы сейсмических датчиков, изготовленные на основе молекулярно-электронных преобразующих элементов, содержащих дополнительные электроды, электронные платы, содержащие управляемый температурой источник тока, и механизм обратной связи.
Для практической реализации изобретения была разработана электронная схема, обеспечивающая задание анодного тока, зависящего от температуры, показанная на Фиг. 1. Цифрой 1 схематически показан молекулярно-электронный датчик, содержащий четырехэлектродный преобразующий элемент (два анода и два катода) 2. Температурно-зависимый анодный ток задается схемой 3. R(T) обозначена электронная цепь, содержащая термистор с отрицательным температурным коэффициентом и два постоянных резистора, один из которых подключен параллельно, а другой - последовательно термистору. Выходной разностный катодный ток преобразуется в напряжение с помощью схемы 4.
Внешний вид преобразующего элемента с дополнительными электродами в виде нитей показана на Фиг. 2. Окончательный вид собранного устройства показан на Фиг. 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Молекулярно-электронный гидрофон с обратной связью на основе магнитогидродинамического эффекта | 2018 |
|
RU2698527C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ПАРАМЕТРОВ МОЛЕКУЛЯРНО-ЭЛЕКТРОННОГО ПРЕОБРАЗОВАТЕЛЯ | 2006 |
|
RU2374652C2 |
| Молекулярно-электронный гидрофон | 2017 |
|
RU2678503C1 |
| Способ увеличения коэффициента преобразования молекулярно-электронного датчика движения | 2017 |
|
RU2659459C1 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННЫЙ ГИДРОФОН С КОМПЕНСАЦИЕЙ СТАТИЧЕСКОГО ДАВЛЕНИЯ | 2019 |
|
RU2724296C1 |
| Преобразующий элемент молекулярно-электронного преобразователя диффузионного типа | 2019 |
|
RU2724297C1 |
| Магнитогидродинамическая ячейка для формирования сигнала обратной связи и калибровки молекулярно-электронных датчиков угловых и линейных движений | 2017 |
|
RU2651607C1 |
| Глубоководный гидрофон | 2018 |
|
RU2696060C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕКТРОДНОГО УЗЛА МОЛЕКУЛЯРНО-ЭЛЕКТРОННОГО ИЗМЕРИТЕЛЯ ЛИНЕЙНЫХ И УГЛОВЫХ ДВИЖЕНИЙ (ВАРИАНТЫ) | 2006 |
|
RU2394246C2 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННЫЙ ДАТЧИК УГЛОВЫХ ДВИЖЕНИЙ | 2011 |
|
RU2454674C1 |
Изобретение относится к измерительной технике, в частности к способу обеспечения температурной стабильности параметров молекулярно-электронных преобразователей, используемых в линейных и угловых акселерометрах. Это изобретение может найти применение в сейсмодатчиках, датчиках для стабилизации движущихся объектов и систем инерциальной навигации, акселерометрах и гидрофонах высокой стабильности и точности. В предлагаемом изобретении задача решена за счет того, что фоновый ток, протекающий через катоды преобразующего элемента, управляется специально разработанной электронной цепью в зависимости от температуры окружающей среды. Для этого в рабочей жидкости преобразователя на расстоянии от 2 до 50 мм от анодов устанавливают дополнительные электроды, находящиеся при потенциале на 100-500 мВ выше потенциала катодов, а через аноды пропускается ток, величина которого зависит от температуры по определенному закону. Действие тока, проходящего через аноды, состоит в управляемом температурой изменении анодной концентрации, которая повышается при увеличении тока и уменьшается в обратном случае. Технический результат - обеспечение точности измерения молекулярно-электронными преобразователями угловых и линейных движений и акустических сигналов в широком температурном диапазоне. 11 з.п. ф-лы, 3 ил.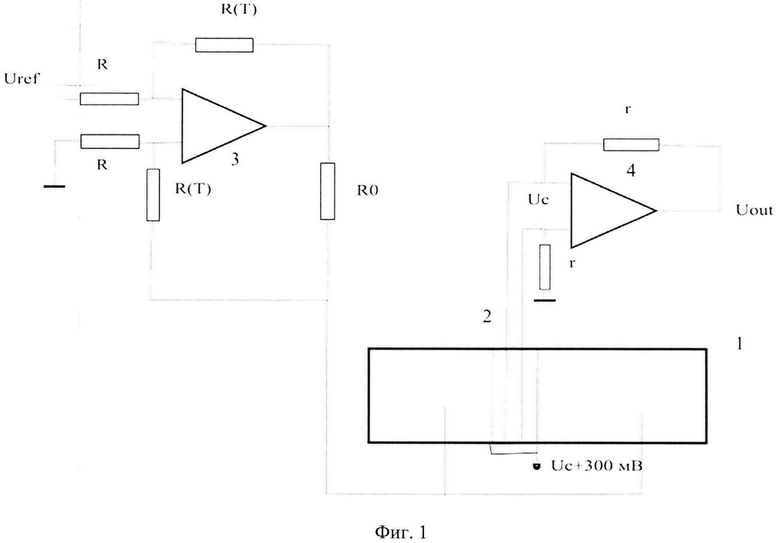
1. Способ обеспечения температурной стабильности параметров молекулярно-электронного преобразователя, содержащего четыре электрода преобразующего элемента и два дополнительных электрода, причем два катода расположены во внутренней части преобразующего элемента, два анода расположены снаружи преобразующего элемента и два дополнительных электрода расположены вне преобразующего элемента с двух сторон от него и подключены к электронике таким образом, что они находятся при постоянном потенциале на 100-500 мВ выше постоянного потенциала катодов, заключающийся в том, что электрический ток протекающий через аноды преобразующего элемента задают электронной цепью, выходной ток которой однозначно определяется температурой окружающей среды.
2. Способ по п. 1, в котором указанные дополнительные электроды расположены в рабочей жидкости на расстоянии от 2 до 50 мм от анодов.
3. Способ по п. 1, в котором закон температурного изменения тока, пропускаемого через аноды, подбирают таким, что изменение градиента концентрации в прикатодной области компенсировало температурные изменения чувствительности в области высоких, более 100 Герц, частот, обусловленные изменением коэффициента диффузии и вязкости в рабочей жидкости.
4. Способ по п. 3, в котором дополнительную стабилизацию температурных изменений чувствительности в области частот менее 100 Гц осуществляют с использованием механизма обратной связи.
5. Способ по п. 1, в котором стабилизацию параметров преобразующего элемента в широком диапазоне температур используют при создании сейсмических датчиков скорости.
6. Способ по п. 1, в котором стабилизацию параметров преобразующего элемента в широком диапазоне температур используют при создании сейсмических датчиков ускорения.
7. Способ по п. 1, в котором стабилизацию параметров преобразующего элемента в широком диапазоне температур используют при создании гидрофонов.
8. Способ по п. 1, при котором в качестве дополнительных электродов используют сетки из платины или платиноиридиевого сплава с шагом 100-500 мкм.
9. Способ по п. 1, при котором в качестве дополнительных электродов используют прямые или изогнутые нити из платины или платиноиридиевого сплава диаметром 50-200 мкм.
10. Способ по п. 1, при котором в качестве дополнительных электродов используют пластины из диэлектрического материала, на которые нанесена пленка толщиной от 0,1 до 300 микрон содержащая платину, или платиноиридиевый сплав, или углерод.
11. Способ по п. 1, в котором управляемый температурой ток создают с помощью электронной схемы, представляющей собой известную из современного уровня техники схему источника тока, выходной ток которой задается выражением  где
где  - стабильное опорное напряжение, R(Т) - сопротивление электронной цепи, содержащей хотя бы один терморезистор, R и R0 - постоянные резисторы.
- стабильное опорное напряжение, R(Т) - сопротивление электронной цепи, содержащей хотя бы один терморезистор, R и R0 - постоянные резисторы.
12. Способ по п. 1, в котором управляемый температурой ток создают с помощью электронной схемы, представляющей собой известную из современного уровня техники схему источника тока, выходной ток которой задается выражением  где
где  - стабильное опорное напряжение, R(Т) - сопротивление электронной цепи, содержащей хотя бы один терморезистор.
- стабильное опорное напряжение, R(Т) - сопротивление электронной цепи, содержащей хотя бы один терморезистор.
| СПОСОБ И УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ПАРАМЕТРОВ МОЛЕКУЛЯРНО-ЭЛЕКТРОННОГО ПРЕОБРАЗОВАТЕЛЯ | 2006 |
|
RU2374652C2 |
| Krishtop, V.G., "Experimental modeling of the temperature dependence of the transfer function of rotational motion sensors based on electrochemical transducers," Russ | |||
| J | |||
| Electrochem., vol | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ приготовления консистентных мазей | 1912 |
|
SU350A1 |
| Chikishev, D.A., Zaitsev, D.L., Belotelov, K.S., Egorov, I.V., "The temperature dependence of | |||

