Гидрофоны, приборы для приема/излучения, и регистрации акустических сигналов в жидкой среде, имеют широкую область применения. Эти приборы используются для научных исследований подводной биосферы, для навигации и локации судов, в качестве приемника сейсмических сигналов, в том числе при разведке полезных ископаемых на шельфах и переходных от суши к морю зонах, в рыбодобывающей отрасли и в других сферах. Гидрофоны могут применяться в составе плавающих и донных сейсмических кос, многокомпонентных измерительных комплексов, например, двойные датчики типа геофон/гидрофон, векторные акустические приемники или донные сейсмические станции. Помимо области и способа применения гидрофоны различаются по механизму преобразования акустического сигнала в электрический ток (пьезоэлектрические, волоконно-оптические, электро- и магнитострикционные, электро- и магнитодинамические и другие) типу исполнения (погружные, врезные) [1]. Использование гидрофонов в условиях морской среды предъявляет к приборам серьезные требования относительно герметичности и стойкости к высоким статическим давлениям. В отличие от мелководных гидрофонов, у которых глубина погружения не превышает нескольких десятков метров (соответствует диапазону гидростатических давлений от нуля до нескольких атмосфер), глубоководные гидрофоны должны работать на глубинах от десятков метров до сотен метров и даже нескольких километров (этому соответствует большой диапазон гидростатических давлений от единиц до нескольких десятков атмосфер). Поэтому глубоководные гидрофоны должны иметь характеристики, слабо зависящие от статического давления в широком диапазоне, или иметь механизм компенсации статического давления. Например, широкое применение глубоководные гидрофоны получили в области сейсморазведки на морском шельфе, где они используются в составе донных сейсмических кос и донных автономный сейсмических станций. При этом глубина погружения может составлять более 500 метров.
На сегодняшний день наиболее распространены пьезоэлектрические [1-4] и волоконно-оптические [5-6] гидрофоны. Существуют также гидрофоны с механизмом преобразования, основанном на принципе молекулярно-электронного переноса [7-8]. Датчики на основе этой технологии успешно зарекомендовали себя в сейсморазведке, навигации, мониторинге состояния сложных инженерных сооружений и зданий и некоторых других областях. Их отличительной особенностью является высокая чувствительность и низкий уровень собственных шумов в области низких частот (от долей до сотен Герц) характерных для сейсморазведки, а также низкое энергопотребление и низкая стоимость. Главным элементом датчиков на основе этой технологии является молекулярно-электронный преобразователь, принцип действия и устройство которого подробно описано в [9].
Молекулярно-электронный преобразователь представляет собой канал с жестким корпусом, заполненный раствором электролита, разделенный на две симметричные относительно поперечного сечения половины электродным узлом и закрытый с торцов непроницаемыми для жидкости упругими мембранами. Электродный узел состоит из четырех электродов, расположенных в порядке катод-анод-анод-катод, между которыми находятся диэлектрические пористые перегородки. При подаче постоянного напряжения на пары катод-анод в результате окислительно-восстановительных реакций на поверхностях электродов возникает стационарное распределение концентрации ионов электролита в пространстве между электродами. Симметричное расположение пар электродов дает в этом случае нулевой разностный катодный ток. При движении раствора электролита вдоль канала стационарное распределение нарушается и разностный катодный ток становится отличным от нуля. Межэлектродный ток линейно зависит от скорости движения раствора электролита.
В молекулярно-электронных гидрофонах, описанных в патентах [7] и [8], одна из мембран преобразователя сообщается с окружающей средой, а другая с камерой, отделенной от окружающей среды жесткой оболочкой. В [7] камера заполнена воздухом и имеет небольшой объем порядка нескольких см3, а в [8] имеет объем порядка нескольких сотен см3 и заполнена легкосжимаемой жидкостью. Для обеспечения линейности отклика гидрофоны оснащены механизмом обратной связи, представляющим собой катушку, закрепленную на корпусе гидрофона и магнит, соединенный с мембраной молекулярно-электронного датчика. При этом выходной сигнал датчика управляет величиной тока в катушке, а специальные управляющие цепи корректируют ток в катушке таким образом, чтобы сила взаимодействия между катушкой с током и магнитом, жестко закрепленном на мембране, компенсировала действие внешнего давления на мембрану. Недостатком предложенных технических решений является существенная зависимость отклика от статического давления, поскольку статическое давление деформирует мембрану и изменяет взаимное расположение магнита и катушки. Как следствие, при увеличении статического давления изменяется сила взаимодействия между катушкой и магнитом и общая чувствительность гидрофона.
Прототипом предлагаемого изобретения является глубоководный гидрофон, представленный в патенте [8], недостатком которого является отсутствие компенсации статического давления, что приводит к существенному изменению отклика датчика при погружении на большие глубины.
Задачей изобретения является усовершенствование конструкции глубоководного гидрофона, которое обеспечивает компенсацию внешнего статического давления, что позволит гидрофону иметь одинаковый отклик вне зависимости от глубины.
Поставленная задача решается тем, что молекулярно-электронный гидрофон с компенсацией статического давления, в котором молекулярно-электронный преобразователь жестко закреплен внутри герметичного корпуса, заполненного легкосжимаемой жидкостью и разделенного на две камеры жесткой стенкой с капилляром, таким образом, что каждая из камер сообщается с одной из мембран молекулярно-электронного преобразователя, при этом внешняя камера из камер отделена от окружающей среды непроницаемой мембраной, а внутренняя камера отделена от окружающей среды жесткой оболочкой корпуса. При этом камера, отделенная от окружающей среды мягкой мембраной, имеет намного меньший объем, чем другая камера При этом в качестве легкосжимаемой жидкости используются полиметилсилоксановые или полидиметилсилоксановые жидкости различной вязкости. При этом для стабилизации параметров гидрофона введена отрицательная обратная связь.
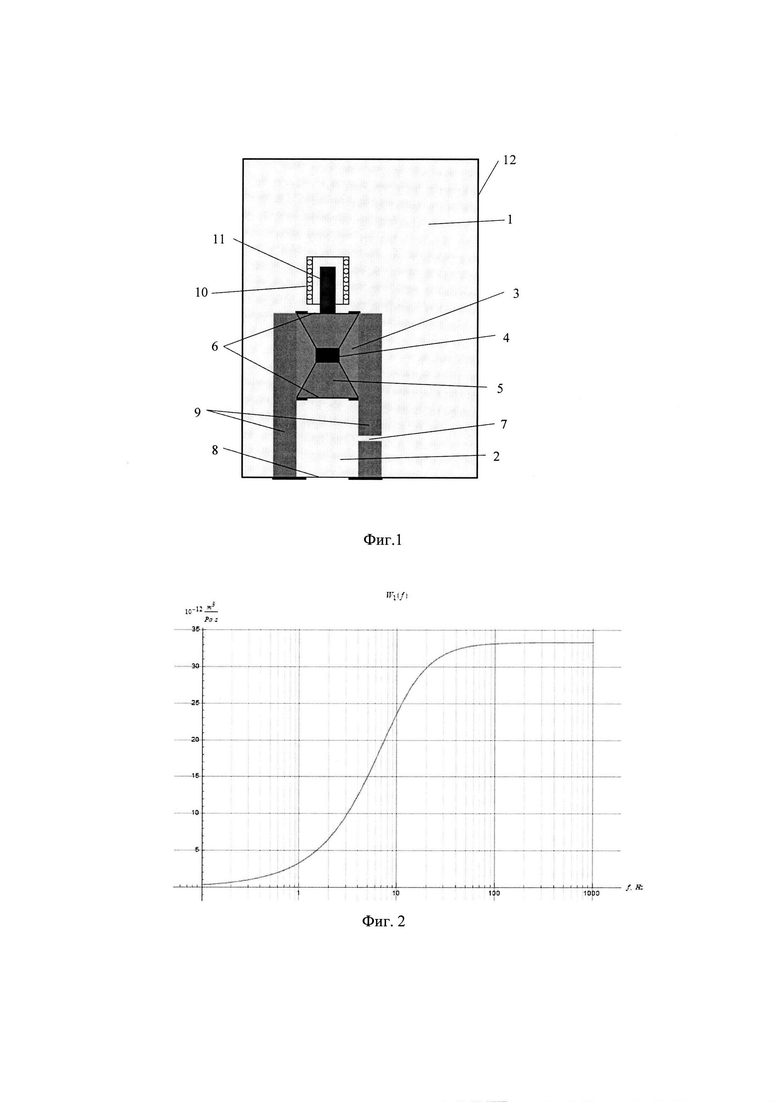
На фиг. 1 представлена схема предлагаемого изобретения, где одна из мембран 6 разделяет канал молекулярно-электронного преобразователя 3 внутреннюю камеру 1 объема под жесткой оболочкой 12, заполненную легко сжимаемой непроводящей электрический ток жидкостью. Другая мембрана разделяет канал и внешнюю камеру 2, заполненную той же легко сжимаемой жидкостью, что и внутренняя камера 1. Внешняя камера 2 сообщается с окружающей средой через непроницаемую мембрану 8. Камеры 1 и 2 разделены между собой жесткой стенкой 9, в которой имеется тонкий капилляр 7. Через капилляр 7 камеры 1 и 2 сообщаются между собой, благодаря этому жидкость может медленно перетекать из одной камеры в другую. Кроме того, на одной из мембран молекулярно-электронного преобразователя закреплен цилиндрический магнит 11, который может свободно перемещаться внутри катушки 10, неподвижной относительно корпуса молекулярно-электронного преобразователя. Магнит 11 и катушка 10 являются элементами электромагнитной силовой отрицательной обратной связи гидрофона. Обратная связь работает таким образом: при действии внешнего сигнала выходной электрический ток с электродного узла 4 подается на катушку 10 через преобразующую электронику, в результате чего внутри катушки 10 возникает магнитное поле, которое воздействует на магнит 11 и, как следствие на мембрану, с определенной силой, частично компенсирующей внешнее воздействие.
Внешняя камера с внешней мембраной и капилляр выполняют функцию компенсации внешнего статического давления в окружающей среде. Капилляр позволяет жидкости перетекать из одной камеры в другую, а мягкая внешняя мембрана позволяет свободно менять объем внешней камеры. Поэтому сжатие жидкости при изменении внешнего статического давления будет происходить за счет изменения объема внешней камеры и деформации внешней мембраны, в то время как мембраны молекулярно-электронного преобразователя при выравнивании давлений между камерами смогут вернуться в положение равновесия за счет собственных сил упругости.
Опишем математически преобразование вариаций давления окружающей среды в движение раствора электролита и механизм компенсации статического давления окружающей среды.
Процесс преобразования вариаций давления в движение раствора электролита можно представить с помощью уравнения, описывающего объемный расход раствора электролита через сечение каналов электродного узла датчика. В этом уравнении пренебрежем инерционностью жидкости, так как она вносит свой вклад в объемный расход только при больших частотах за пределами требуемой для датчика диапазона, при этом из условия несжимаемости раствора электролита мембраны молекулярно-электронного преобразователя будут двигаться одинаково.



где Q - объемный расход раствора электролита через сечение канала молекулярно-электронного преобразователя, s - площадь мембран молекулярно-электронного преобразователя, pout - давление во внешней камере,  - давление раствора электролита в половине канала, которая сообщается с внешней камерой, р0 - статическое давление в окружающей среде, p(t) - воздействие, поданное на внешнюю мембрану, pin - давление во внутренней камере,
- давление раствора электролита в половине канала, которая сообщается с внешней камерой, р0 - статическое давление в окружающей среде, p(t) - воздействие, поданное на внешнюю мембрану, pin - давление во внутренней камере,  - давление раствора электролита в половине канала, которая сообщается с внутренней камерой, Δpin - изменение давления во внутренней камере при подаче возмущения, х - смещение мембран молекулярно-электронного преобразователя, Rh - коэффициент гидродинамического сопротивления канала молекулярно-электронного преобразователя.
- давление раствора электролита в половине канала, которая сообщается с внутренней камерой, Δpin - изменение давления во внутренней камере при подаче возмущения, х - смещение мембран молекулярно-электронного преобразователя, Rh - коэффициент гидродинамического сопротивления канала молекулярно-электронного преобразователя.
Мембрану, посредством котрой внешняя камера сообщается с окружающей средой будем считать мягкой и предположим, что давление во внешней камере совпадает с давлением в окружающей среде.
Так как жидкость в камерах сжимаемая, то, считая относительное изменение давления во внутренней камере малым, можем записать выражение для плотности жидкости во внутренней камере в виде:

где ρ0, ρ - плотности жидкости во внутренней камере в отсутствии воздействия и при поданном воздействии, соответственно, βT - изотермический коэффициент сжимаемости жидкости в камерах.
Выразим Δpin из (4):

где m - массы жидкости во внутренней камере, V = V0 - sx - объем внутренней камеры.
Здесь и далее индекс 0 у параметров внутренней камеры соответствует состоянию в отсутствии внешнего возмущения.
Считая относительное изменение массы жидкости во внутренней камере малым, получим:

где Δm - масса жидкости, поступившей во внутреннюю камеру через капилляр.
Подставим (6) в (5) и отбросив слагаемые 2-го и более высокого порядка малости:

Если воздействовать на внешнюю мембрану гармоническим сигналом p(t) = pωeiωt,
то разность давлений между концами канала молекулярно-электронного преобразователя равна:

После подстановки (8) в (1), получаем:

Теперь запишем массовый расход жидкости через капилляр:

где q(t) - объемный расход жидкости через капилляр. Из закона Пуазейля:

где  - коэффициент гидродинамического сопротивления капилляра, r - радиус капилляра,
- коэффициент гидродинамического сопротивления капилляра, r - радиус капилляра,  - длина капилляра, μ0 - динамическая вязкость сжимаемой жидкости, заполняющей внешнюю и внутреннюю камеры.
- длина капилляра, μ0 - динамическая вязкость сжимаемой жидкости, заполняющей внешнюю и внутреннюю камеры.
После подстановки (11) в (10) с учетом (8) получим:

Представим х(t) и Δm(t) в виде гармонических сигналов:

Подставив (13) в (12), а затем продифференцировав по времени получим:

Выразим отсюда Δmω/m0:

Следовательно:

где Qω = sXω iω - амплитуда колебаний объемного расхода раствора электролита через сечение каналов электродного узла датчика, при этом Q = Qωeiωt.
Подставляя (16) в (9), получаем:

Из (17) получаем передаточную функцию механической системы гидрофона:

Как видно из (18) в выражение для передаточной функции механической системы не входят параметры, зависящие от статического давления окружающей среды, следовательно отклик механической системы также не зависит от статического давления окружающей среды.
Выражение для модуля передаточной функции механической системы гидрофона имеет вид:

Нижняя частота пропускания механической системы гидрофона при этом равна:

Как видно из (20) при Rh < rh нижняя частота пропускания практически не зависит от коэффициента гидродинамического сопротивления капилляра и определяется коэффициентом гидродинамического сопротивления канала молекулярно-электронного преобразователя.
Кроме того, нижняя частота пропускания обратно пропорциональна объему внутренней камеры V0. Таким образом для уменьшения этого параметра и улучшения отклика гидрофона нужно сделать объем внутренней камеры большим, а так как объем внешней камеры не влияет на отклик гидрофона, то его можно сделать существенно меньшим, чем объем внутренней камеры, чтобы уменьшить габариты гидрофона.
Покажем теперь, что мембраны остаются недеформированными после изменения величины внешнего статического давления. Для этого подадим на внешнюю мембрану постоянный сигнал p(t) = Δp, где Δр - величина, на которую изменяется внешнее статическое давление. В данном рассмотрении учтем действие силы упругости на мембраны молекулярно-электронного преобразователя. С учетом этого выражение (9) и продифференцированное по времени выражение (12) примут, соответственно, вид:


Сделав в (21) и (22) замену  , получим систему линейных дифференциальных уравнений:
, получим систему линейных дифференциальных уравнений:
Общее решение (23) имеет вид:

где C1, 2 - константы, определяемые начальными условиями,  - собственные векторы матрицы системы (23), λ1, 2 - собственные числа матрицы системы (23), причем λ1, 2 < 0, так как
- собственные векторы матрицы системы (23), λ1, 2 - собственные числа матрицы системы (23), причем λ1, 2 < 0, так как
Как видно из (24) x → 0 при t → ∞, то есть при изменении внешнего статического давления мембраны молекулярно-электронного преобразователя под действием сил упругости будут возвращаться в исходное положение. В результате в рассматриваемом гидрофоне будет осуществляться компенсация статического давления.
Таким образом, технический эффект предлагаемого решения состоит в том, что благодаря наличию капилляра осуществляется компенсация статического давления и мембраны молекулярно-электронного преобразователя возвращаются в исходное положение при изменении статического давления. Последнее позволяет сохранять взаимное положение катушки и магнита, прикрепленного к одной из мембран, неизменным при различных статических давлениях. В результате отклик гидрофона с отрицательной обратной связью остается неизменным. Кроме того, капилляр практически не влияет на отклик в пределах полосы пропускания гидрофона.
Пример реализации изобретения.
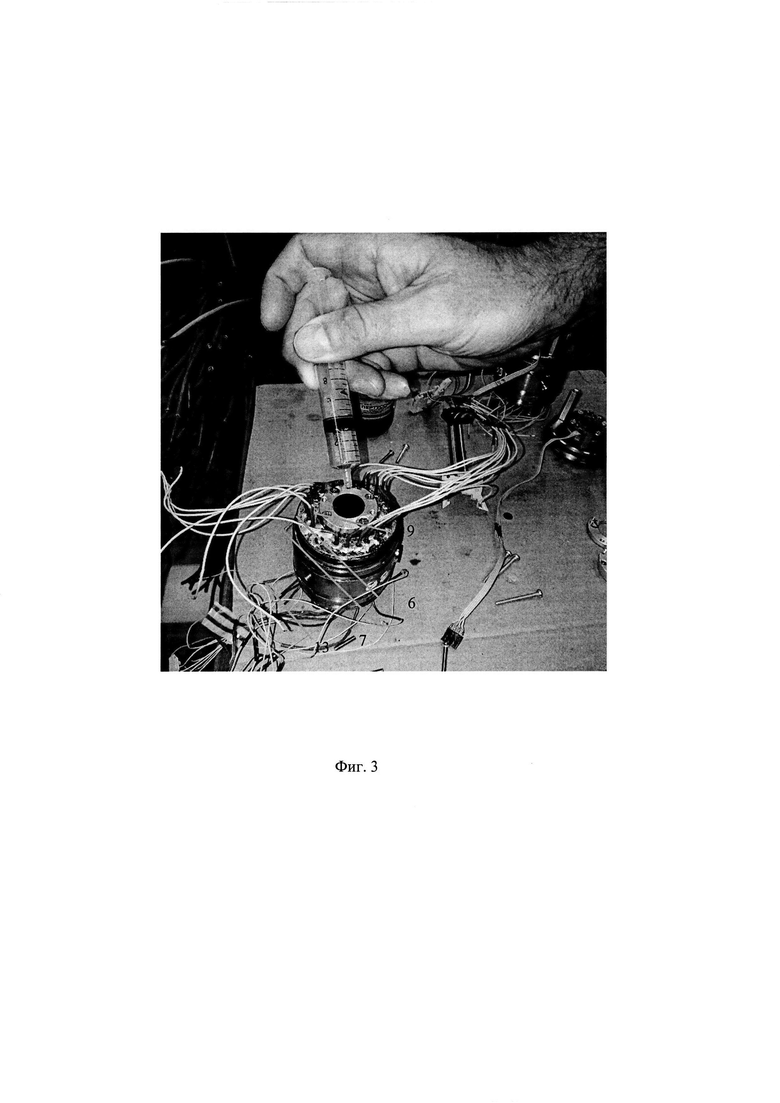
Проведем расчеты согласно формулам (19) и (20) для параметров системы, представленных в Таблица 1. Полученная частотная зависимость приведена на фиг. 2.
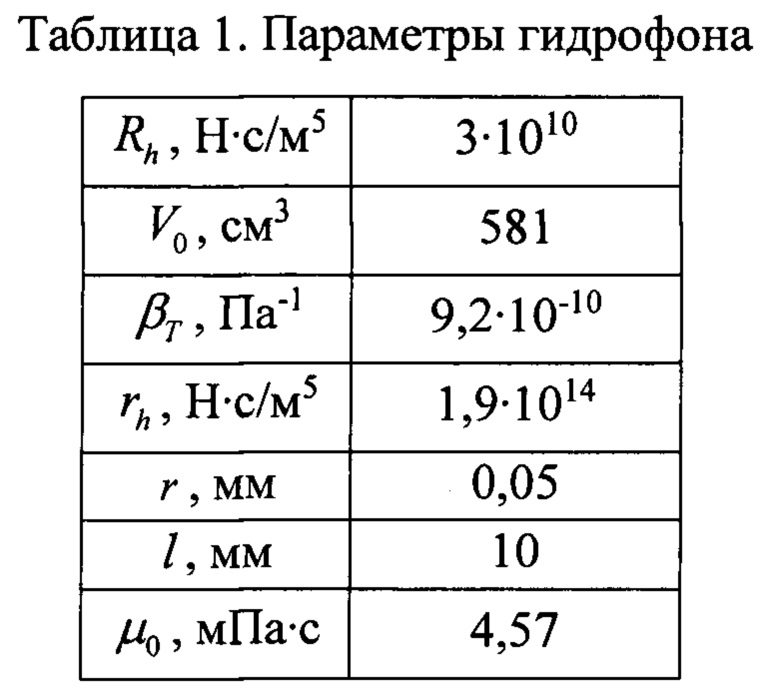

В данном примере реализации нижняя частота пропускания равна ƒниж = 9,9 Гц.
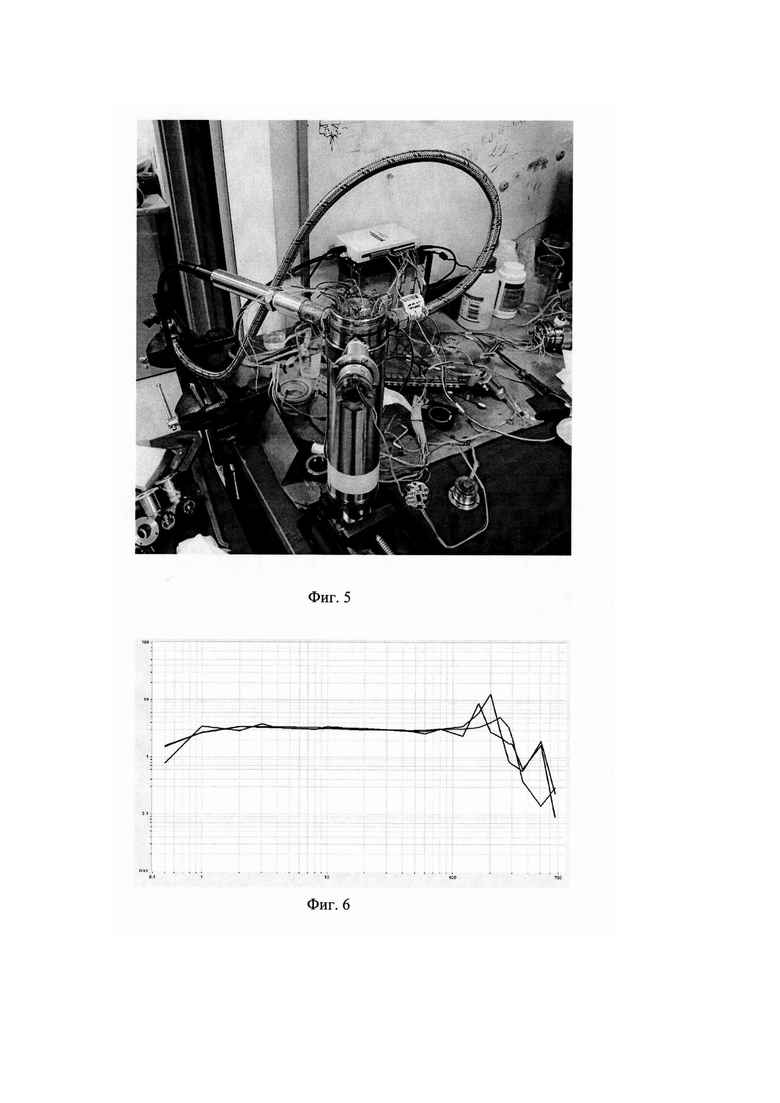
Для практической реализации (Фиг. 3, Фиг 4, Фиг. 5) найденного технического решения было изготовлено основание 13 из нержавеющей стали, имеющее внутренний объем и три исходящих из этого объема отверстия. Три из них выходят на боковую поверхность цилиндра и предназначены для доступа воды в центральную полость при погружении гидрофона. Четвертое отверстие служит для передачи давления к чувствительному элементу. Это отверстие закрыто внешней резиновой мембраной гидрофона 8. Мембрана герметично прижимается к корпусу алюминиевым фланцем 9, стенки которого образуют перегородку, разделяющую внутренний и внешний изготовлено углубление 7, образующее при сборке капилляр, соединяющий внешний и внутренний объемы гидрофона. На фланец устанавливается молекулярно-электронный преобразователь в корпусе 3 с мембранами 6, на одной из которых закреплен магнит 11, взаимодействующий с катушкой 10. Затем на основании закрепляется цилиндрический нержавеющий корпус, который закрывается наружной крышкой, со специальными отверстиями для заполнения внутреннего объема легкосжимаемой жидкостью. В качестве такой жидкости использовалась полиметилсилоксановая жидкость ПМС-5.
На Фиг. 6. показаны амплитудно-частотные характеристики гидрофона, измеренные при разных статических давлениях от 1 до 3 атмосфер. Видно, что характеристики полностью совпадают в основной части частотного диапазона. Разброс данных в высокочастотной области обусловлен погрешностями измерений.
Графические материалы и краткое описание графических материалов, поясняющих суть изобретения:
Фиг. 1 - Схема гидрофона с электромагнитной обратной связью с компенсацией внешнего статического давления. 1 - внутренняя камера под жесткой цилиндрической оболочкой 12, заполненная сжимаемой жидкостью, 2 - внешняя камера, сообщающаяся с окружающей средой через мягкую внешнюю мембрану 8, 3 - молекулярно-электронный преобразователь (4 - электродный узел, 5 - раствор электролита, 6 - упругие мембраны), 7 - капилляр, 9 -жесткие стенки, разделяющие внутреннюю и внешнюю камеры, 10 - катушка, 11 - постоянный магнит.
Фиг. 2 - Расчетная частотная зависимость модуля передаточной функции механической системы гидрофона.
Фиг. 3 - Основание гидрофона с внешней мембраной и фланцем. Также показан процесс заполнения внешней камеры объема с капилляром легкосжимаемой жидкостью.
Фиг. 4 - Основание гидрофона с установленным молекулярно-электронным преобразователем.
Фиг. 5 - Гидрофон в сборе, установленный на стенде для измерения АЧХ при различных гидростатических давлениях.
Фиг. 6 - АЧХ гидрофона при разных давлениях (синяя линия - 1 атм, бордовая - 2 атм, красная - 3 атм), снятая по внешнему сигналу относительно референсного гидрофона ZetLab ВС-311 с чувствительностью 0,477 мВ/Па.
Источники информации
1. С.Н. Sherman and J.L. Butler // Transducers and arrays for underwater sound. Springer, 2007
2. Патент КНР 104486705
3. Патент КНР 201348661
4. Патент РФ на полезную модель 168468
5. Патент РФ на полезную модель 58216
6. Патент США 8094519
7. Патент РФ 2678503
8. Патент РФ 2696060
9. Криштоп В.Г., Агафонов В.М., Бугаев А.С. // Электрохимия. 2012. Т. 48. №7. С. 820
10. Zaitsev, D.L., Avdyukhina, S.Y., Ryzhkov, M.A., Evseev, I., Egorov, E.V., and Agafonov, V.M.: Frequency response and self-noise of the MET hydrophone, J. Sens. Sens. Syst, 7, 443-452, https://doi.org/10.5194/jsss-7-443-2018, 2018
11. Ivan V. Egorov, Anna S. Shabalina, and Vadim M. Agafonov Design and Self-Noise of MET Closed-Loop Seismic Accelerometers IEEE SENSORS JOURNAL, VOL. 17, NO. 7, APRIL 1, 2017
12. V.M. Agafonov, I.V. Egorov, and A.S. Shabalina, "Operating principles and specifications of small-size molecular electronic seismic sensor with negative feedback," Seismic Instrum., vol. 49, no. 1, pp. 5-19, 2013.
| название | год | авторы | номер документа |
|---|---|---|---|
| Глубоководный гидрофон | 2018 |
|
RU2696060C1 |
| Молекулярно-электронный гидрофон с обратной связью на основе магнитогидродинамического эффекта | 2018 |
|
RU2698527C1 |
| Молекулярно-электронный гидрофон | 2017 |
|
RU2678503C1 |
| ЦИФРОВОЙ РЕГИСТРИРУЮЩИЙ МОДУЛЬ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2019 |
|
RU2724964C1 |
| Способ обеспечения температурной стабильности параметров молекулярно-электронного преобразователя в области высоких частот | 2019 |
|
RU2724303C1 |
| Низкочастотный векторный акустический приемник | 2016 |
|
RU2650839C1 |
| БАРОКОМПЕНСИРОВАННЫЙ ЭЛЕКТРОХИМИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ГАЗОАНАЛИЗАТОР (ВАРИАНТЫ) | 2014 |
|
RU2551881C1 |
| Способ изготовления молекулярно-электронной ячейки низкошумящего широкополосного гидрофона для донных исследований | 2018 |
|
RU2703488C1 |
| ГИДРОФИЗИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1987 |
|
SU1841084A1 |
| Низкочастотная двухкомпонентная донная сейсмическая коса | 2017 |
|
RU2687297C1 |

Изобретение относится к акустической метрологии. Молекулярно-электронный гидрофон с компенсацией статического давления содержит молекулярно-электронный преобразователь, жестко закрепленный внутри герметичного корпуса, заполненного легкосжимаемой жидкостью и разделенного на две камеры жесткой стенкой с капилляром, таким образом, что каждая из камер сообщается с одной из мембран молекулярно-электронного преобразователя, при этом внешняя камера из камер отделена от окружающей среды непроницаемой мембраной, а внутренняя камера отделена от окружающей среды жесткой оболочкой корпуса. При этом камера, отделенная от окружающей среды мягкой мембраной, имеет намного меньший объем, чем другая камера. При этом в качестве легкосжимаемой жидкости используются полиметилсилоксановые или полидиметилсилоксановые жидкости различной вязкости. При этом для стабилизации параметров гидрофона введена отрицательная обратная связь. Технический результат – повышение точности измерений на больших глубинах за счет компенсации внешнего статического давления, что позволит гидрофону иметь одинаковый отклик вне зависимости от глубины. 3 з.п. ф-лы, 6 ил., 1 табл.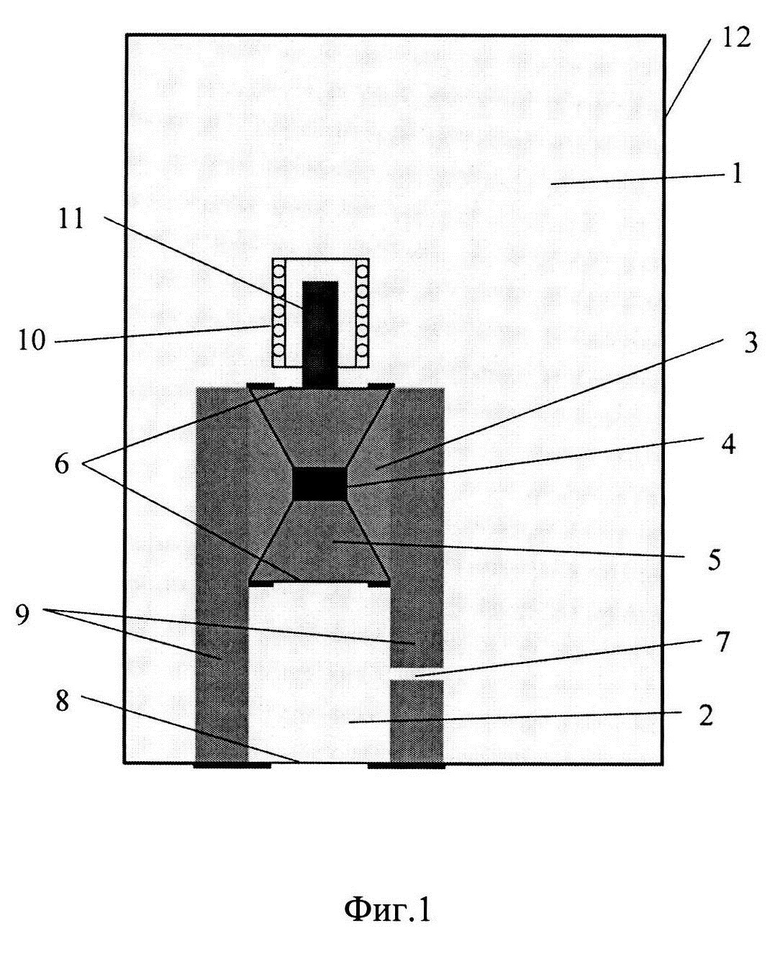
1. Молекулярно-электронный гидрофон с компенсацией статического давления, характеризующийся тем, что молекулярно-электронный преобразователь жестко закреплен внутри герметичного корпуса, заполненного легкосжимаемой жидкостью и разделенного на две камеры жесткой стенкой с капилляром, таким образом, что каждая из камер сообщается с одной из мембран молекулярно-электронного преобразователя, при этом внешняя камера из камер отделена от окружающей среды непроницаемой мембраной, а внутренняя камера отделена от окружающей среды жесткой оболочкой корпуса.
2. Гидрофон по п. 1, характеризующийся тем, что камера, отделенная от окружающей среды мягкой мембраной, имеет намного меньший объем, чем другая камера.
3. Гидрофон по п. 1, характеризующийся тем, что в качестве легкосжимаемой жидкости используются полиметилсилоксановые или полидиметилсилоксановые жидкости различной вязкости.
4. Гидрофон по п. 1, характеризующийся тем, что для стабилизации параметров гидрофона введена отрицательная обратная связь.
| Глубоководный гидрофон | 2018 |
|
RU2696060C1 |
| ДАТЧИК ДИНАМИЧЕСКИХ МИКРОПЕРЕМЕЩЕНИЙ | 0 |
|
SU200465A1 |
| Молекулярно-электронный гидрофон | 2017 |
|
RU2678503C1 |
| Низкочастотный векторный акустический приемник | 2016 |
|
RU2650839C1 |
| Молекулярно-электронный гидрофон с обратной связью на основе магнитогидродинамического эффекта | 2018 |
|
RU2698527C1 |
| Преобразователь параметров механического движения | 1979 |
|
SU932410A1 |
| CN 106908834 B, 05.07.2019 | |||
| US 3065365 A1, 20.11.1962 | |||
| US 3050665 A1, 21.08.1962 | |||
| US 2995714 A1, 08.08.1961 | |||
| US 3296466 A1, 03.01.1967 | |||
| US 3018466 A1, 23.01.1962 | |||
| US 3489995 A1, | |||

