В условиях истощения залежей легкодоступных углеводородов перспективными направлениями поиска и добычи нефти является Арктический шельф и переходные от суши к морю зоны на всем побережье и в зонах широких рек. Для поиска нефти в таких условиях используются специальные датчики: гидрофоны, двойные датчики типа гидрофон/геофон, а также векторные акустические приемники. Большинство датчиков, используемых в настоящее время для морской сейсморазведки производятся по устаревшим технологиям. В то же время, большинство мест, где было просто добывать нефть - истощены, сырьевые компании начинают добывать нефть в трудно доступных местах, что в свою очередь приводит к возрастанию требований к идентичности датчиков, динамическому и частотному диапазонам измерений, ведет к применению самых современных технологий. Технологии предыдущего поколения, такие как пьезоэлектрические, в которых с помощью специального предусилителя измеряется индуцированный заряд или напряжение от пьезоэлектрического чувствительного элемента в ответ на акустическое давление, электрострикционные, магнитострикционные и электростатические датчики оказываются неэффективными, малопригодными и не всегда дают возможность добиваться желаемых результатов в полосе низких частот от долей герца до нескольких сотен герц, традиционной для сейсморазведки. В указанных обстоятельствах встает вопрос разработки датчиков давления на новых технологических принципах, способных удовлетворить возрастающим требованиям инженерных и научных задач.
В тоже время область применения гидрофонов не исчерпывается разведкой полезных ископаемых, а сами датчики являются первичным источником информации о процессах, происходящих в мировом океане. Гидрофоны являются в прямом смысле «ушами» человека под водой, обеспечивающие навигацию и локацию судов, промысловые технологии рыбодобывающей отрасли, научные исследования подводной биосферы, работу подводных акустических коммуникаций и многое другое.
В мире существует и разрабатывается немало разнообразных технологий для регистрации вариаций давления и распространения акустических волн в жидких средах. Так, например, скорость и давление звуковой волны могут быть измерены электромагнитным гидрофоном, состоящим из катушки тонкой проволоки и обычного магнита [1], или высокочувствительным гидрофоном на основе волоконно-оптического лазера с биполяризованными модами [2]. Иной класс акустических сенсоров основан на оптическом отражении на конце волокна [3] или дифракционной решетке Брега-Вульфа [4], а также на основе интерферометра Фабри-Перо [5]. Волоконно-оптические гидрофоны в свою очередь дают высоких линейный отклик вплоть до 100 кПа с чувствительностью на уровне 13,2 мВ/кПа. Другим направлением является разработка датчиков давления на основе MEMS технологии [6]. Чувствительность таких приборов может достигать 3,8 мВ/кПа, а рабочий диапазон частот от 20 Гц до 1 кГц. В тоже время многие ведущие производителя изготавливают гидрофоны на основе традиционного пьезоэлектрического эффекта.
Таким образом, для обнаружения гидроакустических сигналов существует большое количество технических средств, в основном гидрофоны различной конструкции [7-10]. Независимо от технологии, использованной при создании гидрофонов, возможности измерения слабых сигналов с помощью гидрофонов ограничены уровнем регистрируемых помех, не относящихся к полезному сигналу и представляющих с точки зрения процессов измерения шум.
Сравнительно новая и успешно зарекомендовавшая себя технология на принципах молекулярно-электронного переноса заряда (МЭП) в области сейсмологии и геофизических исследований, навигации и управления движением, сейсмостойком строительстве итд, может быть применена и для разработки датчиков давления отличных от традиционных пьезокерамических, микромеханических и оптоволоконных технологий. Отличительными особенностями датчиков на основе МЭП являются исключительно высокая чувствительность и низкий уровень собственных шумов в области инфранизких частот.
Аналогами предлагаемого изобретения являются технические решения, описанные в работах [11, 12], а также патентах [13] и [14], в которых изложены как основные принципы применения отрицательной обратной связи для стабилизации параметров молекулярно-электронных сенсоров линейного ускорения, так и сами технические особенности построения молекулярно-электронного измерителя линейных ускорений. В том числе, следует отметить патент об устройстве датчиков градиента давления на основе электрохимических преобразователей [15].
Таким образом, основные недостатки известных технических решений на основе пьезоэлектрических, волоконно-оптических и других технологий, используемых при создании гидрофонов, состоят в крайне низкой чувствительности в области инфранизких частот и высоком уровне собственного шума в указанной области частот. В качестве прототипа к заявляемому техническому решению по совокупности признаков является малогабаритный молекулярно-электронный сейсмодатчик с отрицательной обратной связью, подробно описанный в [11]. В прототипе регистрируется не давление в приходящем сейсмическом или акустическом сигнале, а ускорение (или скорость) движения среды по выделенному направлению. Для определения ускорений в прототипе используется молекулярно-электронных датчик линейных перемещений, состоящий из преобразующих элементов на основе электродного узла, выполненного на базе микрокерамических технологий. При изготовлении сейсмического датчика чувствительный электродный узел, содержащий микроканалы для перетока жидкости, помещается поперек диэлектрического канала, ограниченного с обеих сторон гибкими мембранами, и заполненного рабочей жидкостью (концентрированным раствором электролита).
Недостатком прототипа является отсутствие возможности непосредственной регистрации акустических давлений, тогда как измерение акустического поля производится по ускорению обтекающих приемник слоев жидкости без прямого измерения акустического давления.
Задачей изобретения является усовершенствование конструкции известного устройства, обеспечивающее реализацию принципа работы для прямого измерения вариаций давления в среде, в которой распространяется акустическая волна.
Также задачей изобретения является повышение чувствительности при прямом измерении вариаций давления относительно классических гидрофонов и снижение собственных шумов в области инфранизких частот.
Поставленная задача реализуется тем, что в предлагаемом техническом решении используются чувствительные элементы на основе молекулярно- электронной технологии, а также сигнал обратной связи улучшающий динамические, температурные и иные характеристики гидрофона.
Технический результат достигается тем, что гидрофон, предназначенный для измерения вариаций давления в жидкой и газообразных средах, состоящий из молекулярно-электронной ячейки, помещенной в цилиндрический корпус, внутри которого находится сквозной канал, заполненный концентрированным раствором электролита, ограниченный двумя упругими мембранами, отличающийся тем, что одна упругая мембрана имеет непосредственный контакт со средой, в которой распространяются акустические волны, а вторая упругая мембрана ограничивает определенный замкнутый объем воздуха при заданном давлении. Для стабилизации параметров введена отрицательная обратная связь в виде электродинамической системы из взаимодействующих между собой проводника с током и магнита, соединенная с одной из упругих мембран гидрофона. При этом гидрофон имеет разные площади ограничивающих канал с электролитом упругих мембран. При этом корпус гидрофона выполнен герметичным.
Принципиальная конструкция гидрофона позволяет использовать датчик для измерения внешнего давления.
Конструкция и основные принципы работы молекулярно-электронного гидрофона с отрицательной обратной связью показаны на фиг. 1. Электропакет - 6, состоящий из набора сетчатых электродов (два анода и два катода), помещают в раствор электролита - 7 между упругими резиновыми мембранами - 4 внутрь внешнего корпуса 1 гидрофона. К одной из двух мембран - 4 приклеен неодимовый магнит - 3, который свободно может перемещаться внутри катушки - 2. Катушка - 2 жестко приклеена к верхней крышке -8, так что магнит может перемещаться внутри нее, благодаря силе электромагнитной индукции. Благодаря наличию активных носителей в растворе электролита и падению потенциала между анодами и катодами, определяющему градиент концентрации этих активных носителей, а также электрохимических реакций на электродах, генерируется электрический ток. Таким образом, главным отличием от традиционного датчика вертикального движения является то, что одна мембрана разделяет внешнюю среду, давление которой измеряется, и сосуд с электролитом, а вторая - сосуд с электролитом и сосуд с воздухом. Последнее позволяет измерять давление, так как в сосуде с воздухом при деформации второй мембраны меняется давление. Рассмотрим упрощенную модель идеального газа, заключенного между второй мембраной и крышкой - 8. Из уравнения состояния идеального газа, при постоянной температуре и количестве газа, получим следующее соотношение, которое в дальнейшем будем называть параметром сосуда с воздухом:

где sм - площадь мембран (обе мембраны имеют одинаковую площадь, х - смещение мембран (из условия несжимаемости жидкости следует, что обе мембраны должны колебаться одинаково). Рассмотрим поведение система при подаче на первую мембрану гармонически изменяющегося давления малой амплитуды. Запишем уравнение для расхода жидкости через преобразующий элемент из закона Пуазейля:

где слагаемое  учитывает инерционность жидкости в сосуде и представляет собой среднюю силу, действующую на единицу площади поперечного сечения жидкости в сосуде. q - объемный расход жидкости через МЭП, х - смещение мембран, р1 - внешнее давление, р2 - давление в сосуде с воздухом, sм ~ 100 мм2 - площадь мембран, sэф ~ 70 мм2 - эффективная площадь сечения сосуда с электролитом, принятая равной средней площади сечения сосуда, р0 - внешнее давление в отсутствии возмущения, m - коэффициент модуляции давления, V0 ~ 1 см3 - объем воздушного пузыря в отсутствии возмущения, М - масса электролита в сосуде,
учитывает инерционность жидкости в сосуде и представляет собой среднюю силу, действующую на единицу площади поперечного сечения жидкости в сосуде. q - объемный расход жидкости через МЭП, х - смещение мембран, р1 - внешнее давление, р2 - давление в сосуде с воздухом, sм ~ 100 мм2 - площадь мембран, sэф ~ 70 мм2 - эффективная площадь сечения сосуда с электролитом, принятая равной средней площади сечения сосуда, р0 - внешнее давление в отсутствии возмущения, m - коэффициент модуляции давления, V0 ~ 1 см3 - объем воздушного пузыря в отсутствии возмущения, М - масса электролита в сосуде,  - коэффициент сопротивления течению жидкости через МЭП, ω - циклическая частота колебания внешнего давления. Считая sмx малым по сравнению с V0, получим:
- коэффициент сопротивления течению жидкости через МЭП, ω - циклическая частота колебания внешнего давления. Считая sмx малым по сравнению с V0, получим:

Подставляя в уравнение для расхода жидкости, получим:



Собственные колебания системы будут со временем затухать, поэтому поведение системы будет определяться внешним воздействием:

Выделив действительную часть, получим:

Таким образом получаем зависимость расхода жидкости от времени:

Амплитуда расхода жидкости через пористую перегородку равна:

Отсюда коэффициент передачи Wmech между амплитудой расхода и амплитудой внешнего давления имеет вид: 
Построим график зависимости коэффициента передачи Wmech от частоты колебания давления  для датчиков с размерами электродного узла 3×3 мм и 6×6 мм при различных внешнем давлении и параметре сосуда с воздухом (pV=1; 4 атм ⋅ см3, р=1; 3 атм), фиг 2.
для датчиков с размерами электродного узла 3×3 мм и 6×6 мм при различных внешнем давлении и параметре сосуда с воздухом (pV=1; 4 атм ⋅ см3, р=1; 3 атм), фиг 2.
Поскольку технология МЭП достаточно хорошо изучена смоделируем собственные шумы молекулярно-электронного гидрофона на основе знания существующих механизмов шумов в МЭП. На низких частотах спектральная плотность гидродинамического шума, выраженная в единицах эквивалентного давления, не зависит от частоты и выражается формулой:

Этот шум обусловлен гидродинамическими флуктуациями электролита через преобразующую ячейку. Существует еще один вид шума, связанный с возникновением в электродном узле замкнутых микропотоков. Этот шум носит название геометрический и выражается формулой:

где α - безразмерный коэффициент, характеризующий разброс коэффициента преобразования для различных микроканалов молекулярно-электронной ячейки. Численное значение α ~ 0,31. Кроме того, имеет место шум, обусловленный конвекцией, он задается выражением:


где Wel-ch - коэффициент передачи МЭП, Rfb - сопротивление обратной связи первого каскада электроники, е - заряд электрона, n - концентрация активной компоненты электролита,  D - коэффициент диффузии, d - межэлектродный зазор. Коэффициент K(ω, sэл) характеризует конвекцию. Численное значение K(ω, sэл) для sэл=15,7 мм2 и электродного узла 6×6 мм:
D - коэффициент диффузии, d - межэлектродный зазор. Коэффициент K(ω, sэл) характеризует конвекцию. Численное значение K(ω, sэл) для sэл=15,7 мм2 и электродного узла 6×6 мм:

На фиг. 3 представлены результаты моделирования известных механизмов шумов в МЭП применительно к разрабатываемому молекулярно-электронному гидрофону, а также прогноз влияния на общий ожидаемый шум гидрофона вариаций давления и объема воздушного пространства под колпаком.
Таким образом, техническим результатом изобретения является возможность прямого измерения вариаций акустического давления в жидких и газообразных средах, повышение чувствительности относительно классических (пьезоэлектрических, волоконно-оптических, микромеханических и иных) гидрофонов в области инфранизких частот, а также снижение собственных шумов гидрофона в низкочастотной области.
Краткое описание графических материалов, поясняющих сущность изобретения.
Фиг. 1. Основные элементы конструкции молекулярно-электронного гидрофона с обратной связью. 1 - внешний корпус гидрофона; 2 - катушка; 3 - магнит; 4 - мембраны; 5 - керамический элемент с электропакетом - 6; 7 - электролит, 8 - крышка.
Фиг. 2. График зависимости коэффициента передачи Wmech от частоты колебания давления.  , размер электродного узла 3×3 мм (сплошные линии),
, размер электродного узла 3×3 мм (сплошные линии),  , размер электродного узла 6×6 мм (пунктирные линии),
, размер электродного узла 6×6 мм (пунктирные линии),  , где Sэл - площадь электродной сетки, Sкан - площадь электродного узла, Sэл~Sкан при одинаковых типах электродных сеток.
, где Sэл - площадь электродной сетки, Sкан - площадь электродного узла, Sэл~Sкан при одинаковых типах электродных сеток.
Фиг. 3. Математическая модель шумов молекулярно-электронного гидрофона. Для разных значений параметров воздушной камеры PV и Р=1 в сравнении с традиционной моделью Венца минимальных шумов мирового океана и некоторыми современные пьезоэлектрическими низко шумящими гидрофонами.
Фиг. 4. Сравнение амплитудно-частотных характеристик МЭ гидрофона при калибровке при помощи вибрационного стенда и само калибровки при помощи цепи электродинамической-обратной связи. По оси абсцисс - частота в Гц, по оси ординат относительные единицы.
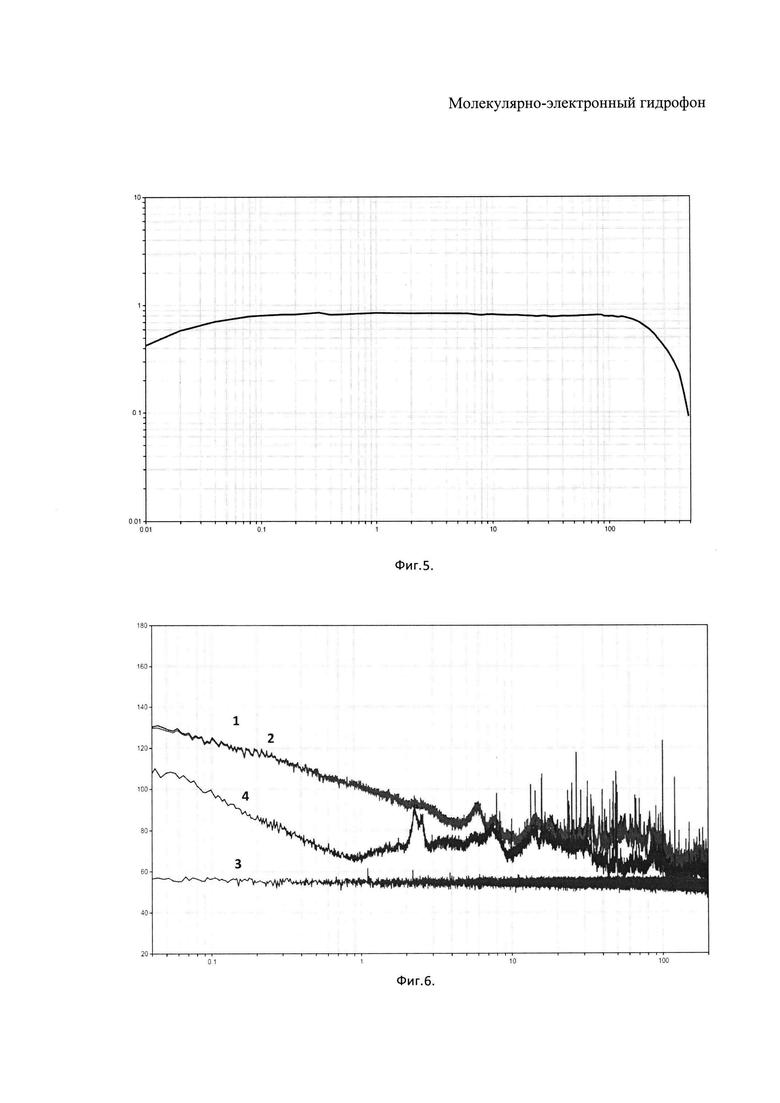
Фиг. 5. Передаточная функция молекулярно-электронного гидрофона с замкнутой петлей обратной связи (относительные единицы измерения по оси ординат, частота по оси абсцисс).
Фиг. 6. Спектральная плотность мощности шумового сигнала в децибелах по отношению к мкПа2/Гц. Графики 1 и 2 - соосные молекулярно-электронные гидрофоны, 3 - собственный шум цифрователя, 4 - некоррелированная часть сигнала двух гидрофонов - имеющая смысл собственного шума сенсоров. По оси абсцисс частота в Гц.
В соответствии с изобретением предлагаемый гидрофон состоит из молекулярно-электронной ячейки - двух преобразующих пар анод-катод, помещенных в отлитый из пластика цилиндрический корпус, внутри которого находится сквозной канал, заполненный концентрированным 4 моль/литр раствором электролита на основе йода лития с добавкой молекулярного йода в концентрации 0,03 моль/литр. Электронная плата обеспечивает преобразование выходных токов молекулярно-электронного преобразователя в напряжение, частотную коррекцию, замыкание обратной связи и фильтрацию выходного сигнала. Измерение амплитудно-частотных характеристик практической реализации изобретения выполнено с помощью прецизионного наклонно поступательного вибростенда, создающего перепады давления в барокамере в диапазоне частот 0,01-200 Гц. При помощи цепи обратной связи была проведена самокалибровка молекулярно-электронного гидрофона в барокамере, когда перепад давления на внешней мембране гидрофона имитировался силой электромагнитной индукции, толкающей прикрепленный к мембране магнит, тем самым вызывая течение электролита через преобразующий элемент. Было показано, Фиг. 4, что калибровочные кривые имеют одинаковую частотную зависимость и отличаются только безразмерным, частотно независимым коэффициентом глубины обратной связи. С помощью каскадов усиления и фильтрации была настроена плоская передаточная характеристика в максимально широкой полосе частот и замкнута силовая отрицательная обратная связь. На Фиг. 5 выполнена калибровка внешним сигналом давления МЭ гидрофона с замкнутой петлей обратной связи. Чувствительность получившегося прибора составила 1,5 мВ/Па, а достигнутая полоса частотного диапазона практических образцов 0,02-200 Гц по уровню 3 дБ.
Экспериментальное измерение собственных шумов было выполнено с помощью вычисления некоррелированной части шумового сигнала двух одинаковых и соосно расположенных молекулярно-электронных гидрофонов. Во избежание возбуждения паразитных мод колебания воды в испытательной камере, а также для сглаживания возможных вариаций температуры в течении длительного промежутка записи, гидрофоны помещались в жесткую металлическую емкость с толстыми стенками, а вся конструкция накрывалась специальным пенопластовым термоколпаком. Шумовые сигналы регистрировались высоко разрядным аналогово-цифровым преобразователем типа NDAS (24 bit). При обработке сигналов выбирался синхронный «тихий» участок записи для обоих сенсоров и считалась для каждого спектральная плотность мощности. Затем она приводилась к чувствительности прибора и отображалась на графике в дБ по отношению к 1 мкПа2/Гц. Соответствующие спектральные плотности мощности представлены на Фиг. 6 (1 и 2), там же отображена приведенная к тем же единицам измерения спектральная плотность мощности системы сбора данных - 3. На Фиг. 6 представлена некоррелированная часть сигналов 1 и 2, имеющая смысл собственного шума молекулярно-электронного гидрофона - кривая 4, она была определена в соответствии с [12] по формуле:

где U1, U2 - спектральные плотности мощности сигналов образцов молекулярно-электронных гидрофонов; U1*, U2* - комплексно сопряженные им значения, W - передаточная характеристика идентичных гидрофонов.
Основные технические характеристики практической реализации молекулярно-электронного гидрофона приведены в таблице 1.
Источники информации.
1. Pol Grasland-Mongrain, Jean-Martial Mari, Bruno Gilles, Jean-Yves Chapelon, and Cyril Lafon Electromagnetic hydrophone with tomographic system for absolute velocity field mapping APPLIED PHYSICS LETTERS 100, 243502 (2012).
2. DI LIU, YIZHI LIANG, LONG JYN, HUOJIAO SUN, LINGHAO CHENG, AND BAI-OU GUAN Highly sensitive fiber laser ultrasound hydrophones for sensing and imaging applications Vol. 41, No. 19 / October 1 2016 / Optics Letters.
3. B. Shen, Y. Wada, D. Koyama, R. Isago, Y. Mizuno, and K. Nakamura, "Fiber-optic ultrasonic probe based on refractive-index modulation in water," in Proceedings of SPIE7753 21st International Conference on Optical Fiber Sensors, 7753, (2011), pp. 77539W.
4. Y. Tan, Y. Zhang, and B. Guan, "Hydrostatic pressure insensitive dual polarization fiber grating laser hydrophone," IEEE Sens. J. 11(5), 1169-1172 (2011).
5. K.S. Kim, Y. Mizuno, and K. Nakamura, "Fiber-optic ultrasonic hydrophone using short Fabry-Perot cavity with multilayer reflectors deposited on small stub," Ultrasonics 54(4), 1047-1051 (2014).
6. Wei Xu, Yuan Liu, Guojun Zhang, Renxin Wang, Chenyang Xue, Wendong Zhang, and Jun Liu, Development of cup-shaped micro-electromechanical systems-based vector Hydrophone, Journal of Applied Physics 120, 124502 (2016); doi: 10.1063/1.496285924.
7. Патент РФ 2368099.
8. Патент РФ 2393643.
9. Патент РФ 2392767.
10. Патент США 6549488.
11. V.М. Agafonov, I.V. Egorov, and A.S. Shabalina, "Operating principles and specifications of small-size molecular electronic seismic sensor with negative feedback," Seismic Instrum., vol. 49, no. 1, pp. 5-19, 2013.
12. Ivan V. Egorov, Anna S. Shabalina, and Vadim M. Agafonov Design and Self-Noise of MET Closed-Loop Seismic Accelerometers IEEE SENSORS JOURNAL, VOL. 17, NO. 7, APRIL 1, 2017.
13. Патент РФ 2128850.
14. Патент РФ на полезную модель №53459.
15. Патент РФ №2403684.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ изготовления молекулярно-электронной ячейки низкошумящего широкополосного гидрофона для донных исследований | 2018 |
|
RU2703488C1 |
| Глубоководный гидрофон | 2018 |
|
RU2696060C1 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННЫЙ ГИДРОФОН С КОМПЕНСАЦИЕЙ СТАТИЧЕСКОГО ДАВЛЕНИЯ | 2019 |
|
RU2724296C1 |
| Молекулярно-электронный гидрофон с обратной связью на основе магнитогидродинамического эффекта | 2018 |
|
RU2698527C1 |
| Низкочастотная двухкомпонентная донная сейсмическая коса | 2017 |
|
RU2687297C1 |
| ЦИФРОВОЙ РЕГИСТРИРУЮЩИЙ МОДУЛЬ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2019 |
|
RU2724964C1 |
| Способ обеспечения температурной стабильности параметров молекулярно-электронного преобразователя в области высоких частот | 2019 |
|
RU2724303C1 |
| ОПТОВОЛОКОННЫЙ ИНТЕРФЕРОМЕТРИЧЕСКИЙ ДАТЧИК СТАТИЧЕСКОГО И ДИНАМИЧЕСКОГО ДАВЛЕНИЯ | 2014 |
|
RU2568072C1 |
| Низкочастотный векторный акустический приемник | 2016 |
|
RU2650839C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
Изобретение относится к измерительной технике, в частности к прямому измерению акустических сигналов, обусловленных перепадом давления. Изобретение представляет собой устройство для измерения изменений давления в акустической волне в жидких и газообразных средах. Изобретение представляет собой гидрофон, отличающийся тем, что он выполнен с использованием электрохимического преобразователя, трансформирующего движение рабочей жидкости в регистрируемый ток, обеспечивающий чувствительность к вариациям давления в полосе частот 0,02-200 Гц с высоким коэффициентом преобразования на уровне не менее 1,5 мВ/Па. Изобретение имеет следующие перспективы применения: шельфовая и глубоководная сейсморазведка полезных ископаемых, навигацию и локацию судов, промысловые технологии рыбодобывающей отрасли, научные исследования подводной биосферы, работу подводных коммуникаций и др. 2 з.п. ф-лы, 6 ил., 1 табл.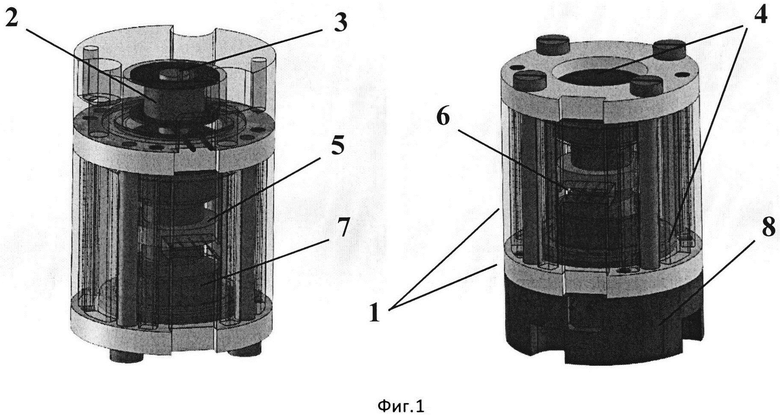
1. Гидрофон, предназначенный для измерения вариаций давления в жидкой и газообразных средах, состоящий из молекулярно-электронной ячейки, помещенной в цилиндрический корпус, внутри которого находится сквозной канал, заполненный концентрированным раствором электролита, ограниченный двумя упругими мембранами, отличающийся тем, что одна упругая мембрана имеет непосредственный контакт со средой, в которой распространяются акустические волны, а вторая упругая мембрана ограничивает определенный замкнутый объем воздуха при заданном давлении, при этом для стабилизации параметров введена отрицательная обратная связь в виде электродинамической системы из взаимодействующих между собой проводника с током и магнита, соединенная с одной из упругих мембран гидрофона.
2. Гидрофон по п. 1, отличающийся тем, что имеет разные площади ограничивающих канал с электролитом упругих мембран.
3. Гидрофон по п. 1, отличающийся тем, что корпус выполнен герметичным.
| POL GRASLAND-MONGRAIN et al | |||
| Electromagnetic hydrophone with tomographic system for absolute velocity field mapping | |||
| Cornell University Library | |||
| Судовая машинная установка с одним или несколькими валами | 1925 |
|
SU1207A1 |
| ТРЕХКОМПОНЕНТНЫЙ ПРИЕМНИК АКУСТИЧЕСКИХ КОЛЕБАНИЙ | 1998 |
|
RU2128850C1 |
| ГИДРОФОН НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2008 |
|
RU2368099C1 |
| US 6003378 A1, 21.12.1999 | |||
| ГИДРОФОН | 2009 |
|
RU2393643C1 |

