ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к аварийной или чрезвычайной остановке судна, обеспечиваемой азимутальным движительным агрегатом/агрегатами.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Азимутальный движительный агрегат представляет собой конфигурацию морских гребных винтов, которые могут быть горизонтально повернуты под любым углом. Это обеспечивает более совершенную маневренность судна, чем фиксированная система гребного винта и руля.
Обычно судно имеет два азимутальных движительных агрегата смежно друг другу. Каждый азимутальный движительный агрегат может иметь ручной контроллер для управления движительным агрегатом.
В случае аварийной остановки необходимо учитывать множество факторов, например, тормозной путь, направление остановки и безопасность процедуры остановки для судового оборудования и людей.
В традиционной процедуре аварийной остановки ориентация гребного агрегата поддерживается в крейсерском положении, то есть гребной винт направлен по существу к транцу судна. Однако направление вращения гребных винтов является обратным. Поскольку гребные винты оптимизированы для режима толкания, тяговый режим обратной операции не позволяет остановить судно на оптимальном расстоянии.
Более эффективный способ остановки судна представляет собой так называемую процедуру аварийной остановки путем поворота гондолы (podway), при которой движительные агрегаты повернуты так, что гребные винты направлены по существу к носу судна. Таким образом, при остановке судна может быть использован эффективный режим толкания гребных винтов.
Однако процедура аварийной остановки часто выполняется в напряженной обстановке и в ограниченном пространстве, в связи с чем она является очень сложной и требует хорошей подготовки и опыта. Не имея такого опыта и уверенности, оператор судна может применять традиционную процедуру аварийной остановки и избегать использования более эффективной, но рискованной процедуры аварийной остановки путем поворота гондолы (podway).
В связи с этим необходимо улучшенное оборудование и способ аварийной остановки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в обеспечении устройства и способа управления, которые определены в независимых пунктах формулы изобретения. Некоторые варианты выполнения раскрыты в зависимых пунктах формулы изобретения.
ЧЕРТЕЖИ
Далее изобретение будет более подробно описано с помощью некоторых вариантов выполнения со ссылкой на приложенные чертежи, на которых:
Фигура 1 показывает вариант выполнения способа выполнения аварийной остановки судна.
ПОДРОБНОЕ ОПИСАНИЕ
Варианты выполнения относятся к судну и, в частности, к процедуре аварийной/чрезвычайной остановки и устройству для выполнения такой аварийной остановки судна.
Судно в соответствии с вариантами выполнения содержит по меньшей мере два азимутальных движительных агрегата. Азимутальный движительный агрегат расположен в нижней части судна и при необходимости может быть горизонтально повернут. В нижней части судна может быть обеспечено пространство такое, что азимутальные движительные агрегаты могут находиться в пределах внешних размеров судна даже при повороте в любое положение. Азимутальные движительные агрегаты могут быть расположены симметрично смежно друг к другу за скегом судна.
Азимутальный движительный агрегат содержит гондолу, которая неподвижно прикреплена к стойке. Стойка прикреплена с возможностью вращения к нижней части судна с помощью подшипникового/поворотного узла. Гондола вмещает гребной электродвигатель для вращения гребного винта, прикрепленного к ступице на конце гондолы. Вал, вращаемый электродвигателем, представляет собой тот же вал, который вращает гребной винт или по меньшей мере соосный с ним.
Одним из основных режимов работы азимутального движительного агрегата является крейсерский режим, в котором гребные винты направлены к задней части судна и находятся в режиме толкания. В аварийной ситуации движительные агрегаты могут быть повернуты из крейсерского режима при сохранении режима толкания.
Азимутальные движительные агрегаты могут управляться с мостика управления судна. Для каждого движительного агрегата может быть обеспечен рычаг управления. Используя рычаг управления, оператор/капитан судна может управлять ориентацией и/или движительной мощностью (частотой вращения) азимутального движительного агрегата. Также может быть обеспечен штурвал или миништурвал для управления азимутальными движительными агрегатами наряду с одним рычагом.
Из-за чрезвычайно сложного управления движительными агрегатами вручную во время процедуры аварийной остановки обеспечена автоматизированная процедура аварийной остановки. Эта автоматизированная процедура может быть инициирована, например, нажимной кнопкой или рычагом на панели/мостике управления судна. Автоматизированная процедура аварийной остановки может иметь один или более этапов, на которых может регулироваться ориентация и/или скорость вращения движительного агрегата/агрегатов. В базовом режиме два движительных агрегата управляются симметрично так, что судно остается на прямом курсе.
В варианте выполнения процедура аварийной остановки содержит множество этапов. На первом этапе ориентация движительных агрегатов может быть сохранена, но скоростью вращения гребных винтов снижается. Эта фаза может применяться до тех пор, пока скорость судна не опустится ниже заданного порогового значения.
Затем после первой фазы движительные агрегаты могут быть повернуты по меньшей мере на 90 градусов, но менее чем на 180 градусов для снижения скорости судна ниже второго порогового значения. В варианте выполнения ориентация гребных винтов составляет около 135 градусов от первоначального положения, в котором гребные винты направлены к транцу судна.
При снижении скорости судна ниже второго порогового значения поворот азимутальных движительных агрегатов на угол, составляющий по существу 180 градусов от первоначального положения, может быть завершен. Этот режим применяется до тех пор, пока скорость судна не опустится ниже третьего порогового значения.
Наконец, движительные агрегаты могут быть повернуты на около 90 градусов так, чтобы гребные винты движительных агрегатов были направлены друг к другу. Этот этап может применяться для балансировки судна.
В вариантах выполнения ручное устройство/устройства управления может по меньшей мере в некоторой степени подавлять автоматизированную процедуру аварийной остановки. Ручное устройство управление может, например, замедлять вращение одного из движительных агрегатов, вращение которого определено процедурой аварийной остановки. Таким образом, эффект отбрасывания замедленного движительного агрегата может быть снижен, в результате чего судно поворачивается к другой стороне. Альтернативно или дополнительно ручное устройство/устройства управления может применяться для регулировки ориентации одного или обоих движительных агрегатов.
Зависимость между миништурвалом и движительными агрегатами может быть, например, такой, что, когда оператор поворачивает миништурвал вправо, указывая необходимость поворота судна вправо, система управления уменьшает мощность отбрасывания движительного агрегата с правой стороны.
В режиме аварийной остановки оба азимутальных движительных агрегата поворачиваются по меньшей мере на 90 градусов от первоначального положения крейсерского режима, в котором оба движительных агрегата направлены к задней части судна. При инициации режима аварийной остановки азимутальные движительные агрегаты предпочтительно работают симметрично друг другу. То есть они оба работают под одним и тем же углом относительно корпуса судна, и их движительные мощности равны друг другу. Таким образом, в режиме аварийной остановки судно движется прямо вперед.
Фигура 1 показывает вариант выполнения способа. На этапе 100 пользователь обеспечивает ввод для инициации процедуры аварийной остановки. Ввод может быть осуществлен на мостике управления, например, посредством нажимной кнопки. Альтернативно для активации процедуры может быть обеспечен рычаг. В некоторых вариантах выполнения при необходимости эта же кнопка или рычаг могут быть использованы для прекращения процедуры.
На этапе 102 азимутальные движительные агрегаты могут управляться для выполнения процедуры аварийной остановки. Как объяснено выше, процедура может включать в себя несколько этапов, на которых регулируются параметры управления движительных агрегатов, например, ориентация и движительная мощность, в соответствии с заданными или вычисленными пороговыми настройками. Процедура аварийной остановки может быть реализована посредством программного обеспечения и/или аппаратного обеспечения. Процедура управления может вызывать физическую реакцию устройств управления, обеспеченных на панели мостика, на этапы процедуры управления. То есть рычаги управления, например, азимутальные рычаги, миништурвал или штурвал, могут быть физически повернуты, или управление скоростью может быть отрегулировано в соответствии с процедурой.
На этапе 104 могут быть использованы устройства/рычаги управления, несмотря на то, что процедура аварийной остановки продолжается. То есть пользователь может регулировать курс судна, например, путем поворота азимутального рычага или миништурвала для выполнения маневра судна. При завершении пользователем выполнения маневра процедура может возобновляться и продолжаться для остановки судна максимально быстро на прямолинейном пути следования.
Варианты выполнения обеспечивают ряд преимуществ. Базовый режим, в котором процедура аварийной остановки является автоматизированной, обеспечивает очень хорошую основу для эффективной и стабильной процедуры остановки судна. При параллельном, одновременном и симметричном управлении гребными агрегатами риск опрокидывания судна может быть предотвращен. Кроме того, если ориентации гребных агрегатов основаны на скорости судна, повреждение компонента судна вследствие слишком быстрых управляющих перемещений может быть предотвращено.
Если основная процедура аварийной остановки автоматизирована для основной части, капитан судна может сконцентрироваться на оценке необходимости маневров для оптимального выполнения процедуры аварийной остановки. При выполнении капитаном маневров на ручном контроллере или голосовом контроллере, например, управляющие действия могут по меньшей мере частично подавлять основную процедуру аварийной остановки. Все это время процедура аварийной остановки может устанавливать пределы, в которых могут быть выполнены маневры, для обеспечения безопасности процедуры аварийной остановки.
Специалисту в области техники будет понятно, что по мере развития технологий концепция изобретения может быть реализована различными путями. Изобретение и его варианты выполнения не ограничены описанными выше примерами и могут быть изменены в пределах объема охраны формулы изобретения.

Изобретение относится к аварийной или чрезвычайной остановке судна, обеспечиваемой азимутальным движительным агрегатом. Устройство управления для управления по меньшей мере двумя азимутальными движительными агрегатами судна содержит один или более рычагов для отдельного или совместного управления азимутальными движительными агрегатами, элемент активации аварийной остановки для активации процедуры аварийной остановки, после которой выполняется процедура аварийной остановки, при которой ориентация и движительная скорость азимутальных движительных агрегатов регулируются до тех пор, пока скорость хода судна по меньшей мере не уменьшится с момента активации процедуры аварийной остановки. Устройство управления выполнено с возможностью регулировки процедуры аварийной остановки путем регулировки ориентации и/или движительной мощности по меньшей мере одного азимутального движительного агрегата в соответствии с управляющим жестом оператора, принятым на одном или более рычагах во время процедуры аварийной остановки. Достигается эффективность, безопасность и стабильность при процедуре аварийной остановки судна. 2 н. и 9 з.п. ф-лы, 1 ил.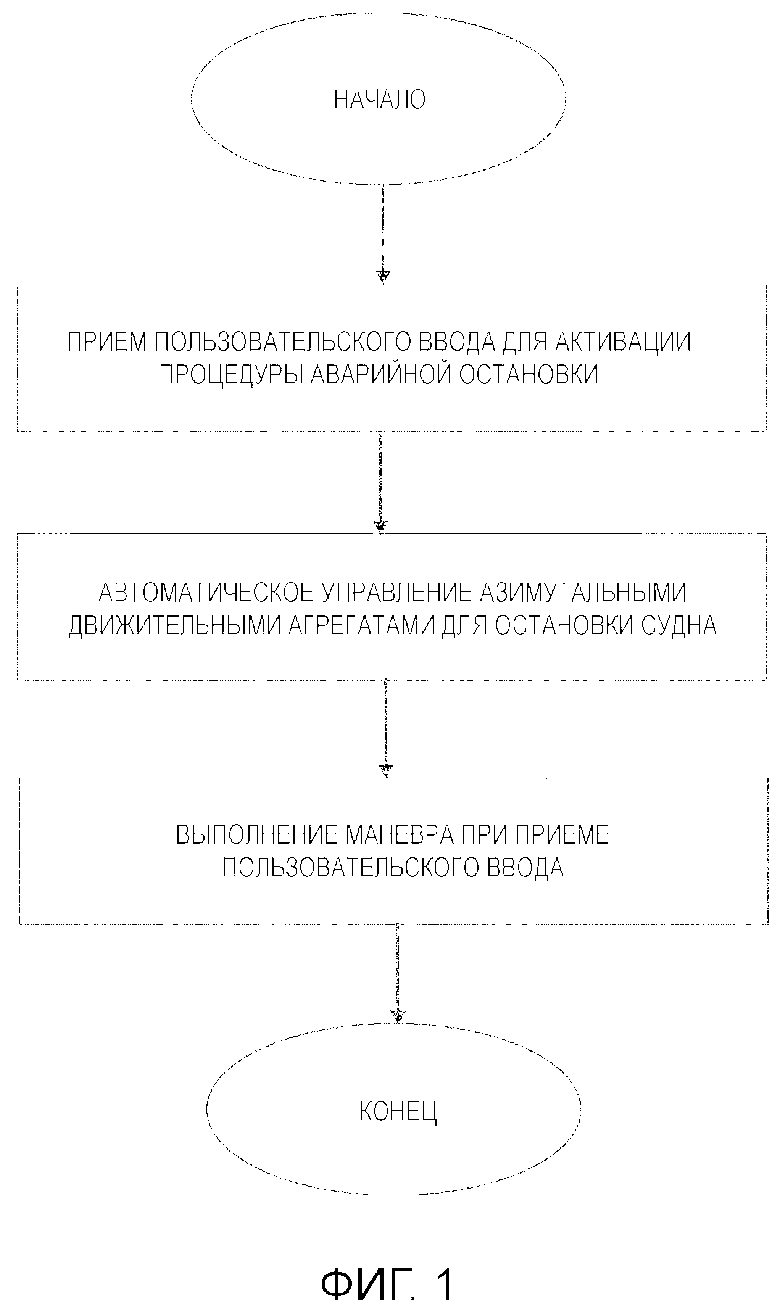
1. Устройство управления для управления по меньшей мере двумя азимутальными движительными агрегатами судна, содержащее:
один или более рычагов для отдельного или совместного управления по меньшей мере двумя азимутальными движительными агрегатами;
элемент активации аварийной остановки для активации процедуры аварийной остановки;
средство для выполнения процедуры аварийной остановки, при которой ориентация и скорость азимутальных движительных агрегатов регулируются до тех пор, пока скорость хода судна по меньшей мере не будет уменьшена с момента активации процедуры аварийной остановки элементом активации аварийной остановки, отличающееся тем, что
устройство управления выполнено с возможностью регулировки процедуры аварийной остановки путем регулировки ориентации и/или движительной мощности по меньшей мере одного азимутального движительного агрегата в соответствии с управляющим жестом оператора, принятым на одном или более рычагах во время процедуры аварийной остановки.
2. Устройство управления по п.1, отличающееся тем, что устройство управления содержит мостик управления судна.
3. Устройство управления по любому предыдущему пункту, отличающееся тем, что элемент активации содержит нажимную кнопку, расположенную на мостике управления судна.
4. Устройство управления по любому предыдущему пункту, отличающееся тем, что устройство управления выполнено с возможностью физического выполнения управляющих жестов, определенных процедурой аварийной остановки, на одном или более рычагах.
5. Устройство управления по п.1, отличающееся тем, что процедура аварийной остановки содержит один или более этапов так, что ориентация и/или движительная мощность азимутальных движительных агрегатов изменяется между этапами.
6. Устройство управления по любому предыдущему пункту, отличающееся тем, что процедура аварийной остановки содержит этап, на котором азимутальные движительные агрегаты работают в режиме толкания и повернуты по меньшей мере на 90 градусов от положения, в котором гребной винт азимутального движительного агрегата направлен к транцу судна.
7. Устройство управления по любому предыдущему пункту, отличающееся тем, что процедура аварийной остановки выполнена с возможностью управления по меньшей мере двумя азимутальными движительными агрегатами симметрично так, что движительные мощности азимутальных движительных агрегатов равны друг другу, и ориентации симметричны относительно продольного направления судна.
8. Устройство управления по любому предыдущему пункту, отличающееся тем, что процедура аварийной остановки выполнена с возможностью изменения ориентации азимутальных движительных агрегатов в зависимости от скорости судна.
9. Устройство управления по любому предыдущему пункту, отличающееся тем, что процедура аварийной остановки содержит один или более следующих этапов:
первый этап, на котором поворачивают по меньшей мере два азимутальных движительных агрегата менее чем на 180 градусов от крейсерского положения, в котором гребной винт азимутального движительного агрегата направлен к транцу судна, и применяют максимальную движительную мощность до тех пор, пока скорость судна не опустится ниже первого порогового значения;
второй этап, на котором завершают поворот азимутальных движительных агрегатов на угол, составляющий по существу 180 градусов от крейсерского положения, и применяют максимальную движительную мощность до тех пор, пока скорость судна не опустится ниже второго порогового значения; и
третий этап, на котором поворачивают азимутальные движительные агрегаты в положение на 90 градусов от первоначального положения для балансировки судна.
10. Способ выполнения аварийной остановки судна, имеющего по меньшей мере два азимутальных движительных агрегата, содержащий этапы, на которых:
принимают (100) ввод от оператора судна, указывающий, что следует начать процедуру аварийной остановки; и
выполняют (102) процедуру аварийной остановки для автоматического управления по меньшей мере двумя азимутальными движительными агрегатами для остановки судна, отличающийся тем, что содержит этапы, на которых:
принимают управляющий ввод посредством ручного контроллера для управления курсом судна во время процедуры аварийной остановки; и
регулируют (104) процедуру аварийной остановки так, что по меньшей мере одна из ориентации и движительной мощности по меньшей мере одного азимутального движительного агрегата отклоняется от соответственных значений, определенных процедурой аварийной остановки.
11. Способ по п.10, отличающийся тем, что процедура аварийной остановки содержит один или более этапов, на которых ориентация азимутальных движительных агрегатов изменяется в зависимости от скорости судна.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| JP 2012116248 A, 21.06.2012 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СПОСОБ ПРОХОЖДЕНИЯ ОТНОСИТЕЛЬНО ШИРОКОГО СУДНА ЧЕРЕЗ ЛЕДОВОЕ ПОЛЕ, ЛЕДОКОЛ | 1998 |
|
RU2205768C2 |

