Изобретение относится к способу и устройству для управления судном, при этом судно приводится в движение и/или управляется по меньшей мере с помощью двух пропульсивных установок. Более точно, изобретение относится к способу, согласно ограничительной части пункта 1 формулы изобретения, и к устройству, согласно ограничительной части пункта 10 формулы изобретения.
Силовая система для больших водных судов часто состоит из нескольких устройств с гребным винтом, работа, управление и структура которых отличается друг от друга от случая к случаю. В качестве примера можно упомянуть систему, которая состоит из главных гребных винтов и отдельных рулевых гребных винтов, или систему, состоящую из двух фиксированных главных гребных винтов и отдельного рулевого устройства. Кроме того, могут иметься гребные винты с фиксированными лопастями и гребные винты с регулируемыми лопастями в системе гребных винтов. Один предпочтительный способ осуществления состоит из гребных винтов, которые расположены друг за другом на одной и той же оси и которые вращаются в противоположных направлениях, в так называемом силовом устройстве CPR (противоположно вращающиеся гребные винты).
В судовых приводах, где действие рулевого управления и/или движения вызывается с помощью двух различных пропульсивных устройств, команды управления необходимо подавать в соответствии с характеристиками пропульсивного устройства. При грубом группировании, например, команду управления, задающую направление судна, и команду управления, задающую скорость судна, необходимо подавать по отдельности. Оператор судна может подавать рулевую команду с помощью одного управляющего устройства, однако действительный управляющий сигнал пропульсивных устройств является разным для различных типов устройств. В соответствии с этим, управление углами лопастей в гребном винте с управляемым шагом может отличаться от управления скоростью вращения гребного винта или взаимного управления гребными винтами в системе CPR.
Задачей силовой установки судна является возможно более эффективное выполнение команд управления оператора судна при всех обстоятельствах. Взаимное управление регулируемыми приводами должно выполнять команды управления так, чтобы все части системы работали оптимально. Общая эффективность также должна быть возможно высокой во всех рабочих ситуациях. Например, рулевая команда, поданная с помощью штурвала в системе азимутального типа при движении с заданной скоростью, может вызвать действие, которое имеет правильное направление, однако мощность силовой установки больше не является оптимальной, поскольку изменяется взаимное положение рулевого гребного винта и фиксированного гребного винта. Соответствующим образом, лишь регулирование угла лопастей может вызвать уменьшение общей эффективности, если одновременно не изменять скорость гребных винтов, как необходимо для работы системы CPR.
В целом, в системе, которая состоит из двух или более силовых установок, действие управления, направленное на одно силовое устройство, также влияет на работу другого силового устройства и тем самым на работу и эффективность всей системы.
Приводная и энергетическая система судна прекращают работу, когда доступная энергия и мощность по-разному ограничены как в условиях нормального привода, так и особенно при исключительных обстоятельствах. Ограничения могут быть вызваны как производством энергии или мощности, так и регулируемыми характеристиками устройства. Управление может оказывать влияние не только на эффективность пропульсивной системы, но также на ее надежность. Усилия, прилагаемые к гребному винту, могут значительно изменяться, когда, например, угол отклонения рулевого гребного винта системы CPR изменяется с помощью азимутального механизма.
Ранее, например, в патенте США US 5061212, было раскрыто устройство регулирования угла лопастей гребного винта, с помощью которого регулируется угол лопастей в зависимости от скорости. Управление взаимной разницей углов между двумя гребными винтами, которые расположены на разных валах, для обеспечения низкого уровня шума, раскрыто в патенте США US 6190217.
Целью данного изобретения является создание новой пропульсивной системы, с помощью которой управление приводным механизмом на судне, имеющем несколько пропульсивных устройств, выполняется возможно более эффективно. Эта проблема решена с помощью способа, характеризуемого признаками отличительной части пункта 1 формулы изобретения. Соответственно, устройство, согласно изобретению, характеризуется признаками отличительной части пункта 10 формулы изобретения.
Решение, согласно изобретению, обеспечивает очень хорошую общую эффективность пропульсивного устройства судна. Команда управления с мостика судна или из другого места рулевого управления, такого как машинное отделение, подается в главный контроллер, который обрабатывает и выдает команду управления в виде управляющих сигналов, которые направляются в различные пропульсивные устройства. При этом главный контроллер записывает рабочее состояние пропульсивных устройств, выбирает режим привода судна, ограничения для пропульсивных устройств, состояние систем подачи энергии и мощности. Аналогичным образом, определяется рабочая точка пропульсивных устройств при генерировании управляющих сигналов на основе их характеристик или их соответствующих рабочих параметров. Приводы первого и второго гребных винтов, по существу, отделены друг от друга, за счет чего они не связаны с одним и тем же валом. Валы гребных винтов не имеют также коаксиальную структуру, а установлены физически отдельно друг от друга.
В системе CPR противоположно вращающиеся гребные винты, которые расположены друг за другом в продольном направлении судна, обычно расположены, по существу, на одном горизонтальном уровне. Для силовой системы является существенным, чтобы гребные винты вызывали возможно более предпочтительный пропульсивный эффект. В соответствии с этим, изобретение применимо к таким силовым системам, где гребные винты имеют взаимный пропульсивный эффект.
Согласно одной предпочтительной модификации, силовая система судна состоит из фиксированного пропульсивного средства и поворотного так называемого азимутального пропульсивного средства. Таким образом, главное управляющее устройство создает управляющий сигнал для неподвижного пропульсивного средства, т.е. непосредственно для силового двигателя, который вращает вал, на котором закреплено пропульсивное средство. Одновременно главное управляющее устройство создает другой управляющий сигнал, с помощью которого выполняется управление мощностью и скоростью вращения азимутального пропульсивного средства. Как каждый управляющий сигнал воздействует на пропульсивное средство, которым он управляет, определяется внутренними характеристиками и регулировочными средствами пропульсивного средства. Эти функции выполняются с помощью известных для специалистов в данной области техники способов обеспечения желаемой скорости судна. Согласно изобретению, управляющие сигналы регулируются так, чтобы комбинированная эффективная мощность пропульсивных устройств была оптимальной.
Согласно другому предпочтительному варианту выполнения изобретения, осуществляется аварийная остановка. При этом угол лопастей первого гребного винта и рабочая скорость второго гребного винта регулируются одновременно так, что они одновременно имеют нулевую величину и что они обе регулируются в направлении отрицательных величин, приводящих к остановке судна.
Ниже приводится подробное описание варианта выполнения изобретения со ссылками на прилагаемые чертежи, на которых изображено:
фиг.1 - силовая система судна, управляемая в соответствии с изобретением;
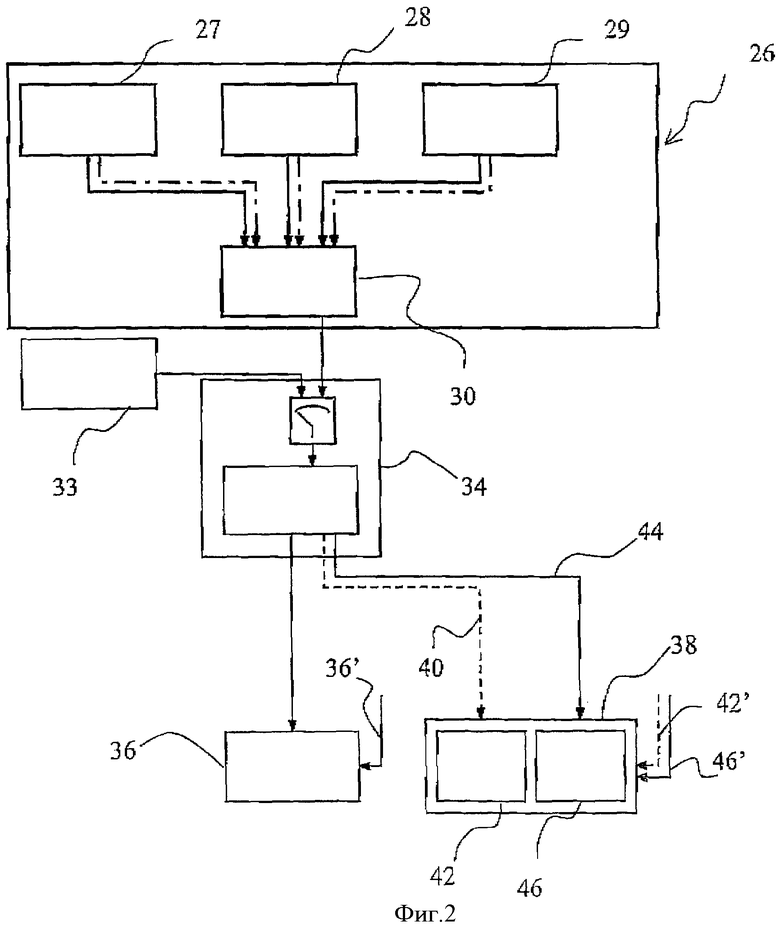
фиг.2 - блок-схема системы управления, согласно изобретению, и
фиг.3 - характеристики силовой системы.
Силовая система судна, показанная на фиг.1, состоит из главного гребного винта 2 и управляющего гребного винта 4, которые установлены на одной продольной линии судна 6. Гребные винты расположены для вращения в нормальном режиме в противоположных направлениях, за счет чего они создают так называемую силовую систему CPR. Вал 8 главного гребного винта опирается с помощью подшипников 9 на корпус 6, и главный двигатель 10 судна, такой как дизельный двигатель, подает приводную мощность на вал. На фиг.1 показаны два дизельных двигателя, и вал 8 гребного винта соединен с двигателем через передачу 11 и/или сцепление. В случае, когда используется только один главный двигатель, главный двигатель может быть непосредственно соединен с валом гребного винта. Если главный гребной винт 2 имеет регулируемые лопасти, то ими можно управлять с помощью известного способа. Главный гребной винт может иметь также фиксированные лопасти. Рулевой гребной винт 4 соединен с поворотным так называемым азимутальным устройством 12, при этом допустимый угол поворота устройства может изменяться от ±35° до максимально ±360°. Электрическая сеть судна, которая получает энергию от генераторов 18, вращаемых главным двигателем 10 или другими силовыми двигателями 16, снабжает электродвигатель 14, вращающий рулевой гребной винт. Рулевой гребной винт 4 и главный гребной винт 2 управляются своими собственными управляющими устройствами, а именно азимутальным управляющим устройством 20 и подруливающим управляющим устройством 22, соответственно. Согласно изобретению, азимутальное управляющее устройство 20 и подруливающее управляющее устройство 22 принимают свои управляющие сигналы из управляющего устройства CPR. Изобретение можно применять не только к устройству, содержащему поворотный рулевой гребной винт, но также к системе гребных винтов с фиксированной гондолой, при этом управление осуществляется с помощью отдельного руля.
Силовая система, показанная на фиг.1, управляется с помощью схемы управления, показанной на фиг.2. Следует понимать, что на схеме показаны лишь существенные части, которые влияют на решение, согласно изобретению, а другие части системы управления, в частности части, влияющие лишь на различные пропульсивные устройства или предназначенные для внутренних операций управления, показаны суггестивно. Команды управления подаются на мостике 24, при этом команды задают скорость и направление судна. В зависимости от расположения капитана команды подаются с середины 28 мостика или командных устройств левого борта 27 или правого борта 29. Действующее командное устройство выбирается выбирающим устройством известным образом. При необходимости команды управления могут также подаваться с помощью управляющего устройства 32, расположенного в машинном отделении. Команды управления передаются в блок 34 управления CPR, который на основе стадии работы определяет управляющие сигналы, подлежащие направлению в различные пропульсивные блоки, в азимутальный блок и в главный гребной винт. Дополнительно к командам управления на управляющие сигналы оказывают влияние, среди прочего, доступная на борту мощность, комбинированная силовая мощность пропульсивных блоков, режим работы судна. Из системы 34 управления CPR один управляющий сигнал передается в блок 36 управления азимутальным пропульсивным средством, который задает скорость вращения электродвигателя 14, приводящего во вращение пропульсивный блок, и скорость вращения гребного винта 4, фиксированного на своем валу. Другой управляющий сигнал из системы управления CPR передается в управляющий блок 38 главного гребного винта, который на основе управляющего сигнала задает скорость вращения гребного винта 2 и угол лопастей гребного винта, так что создается требуемая пропульсивная мощность. Это выполняется с помощью технологии, известной из управления дизельным двигателем и из управления гребным винтом с управляемым шагом. В зависимости от реализации отдельный управляющий сигнал 40 направляется в блок 42 управления углом лопастей, и отдельный управляющий сигнал 44 - в блок 44 управления скоростью главного гребного винта, как показано на фиг.2, или же общий управляющий сигнал главного гребного винта направляется в подруливающее управляющее устройство, которое управляет шагом и скоростью главного гребного винта.
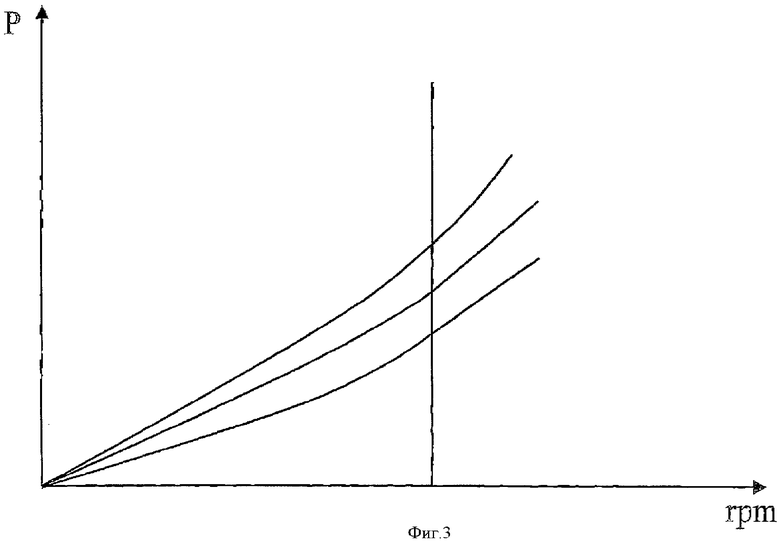
Система управления CPR задает, согласно изобретению, отдельные управляющие сигналы как для азимутального пропульсивного блока, так и для главного гребного винта, в качестве ответа на команду управления. В соответствии с этим, для выполнения команды управления образуются по отдельности величины для азимутального блока для создания требуемой мощности и скорости вращения и одновременно управляющие величины для управления скоростью вращения и углом лопастей главного гребного винта. В применениях, где главный гребной винт имеет фиксированные лопасти, система управления CPR задает как для главного гребного винта, так и для рулевого гребного винта опорные скорости, с помощью которых обеспечивается оптимальная полная эффективность судна. На фиг.3 показаны кривые мощности силовых двигателей, которые используются для задания управляющего сигнала для приводов гребных винтов. В качестве регулируемых переменных здесь используются скорости вращения двигателей и шаг гребного винта, с помощью которых в каждой ситуации определяется наилучшая общая эффективность привода.
Во время нормального режима привода управляющие сигналы для различных пропульсивных систем изменяются по линейному закону, так что взаимное отношение мощностей пропульсивных систем остается в желаемых пределах.
При комбинированном режиме управления ходкостью судна азимутальный привод и главный силовой двигатель приводятся в действие с помощью заданного взаимного отношения мощности к скорости. Если азимутальный двигатель или главный двигатель не способны выдерживать эту опорную величину, то опорная величины другой системы ограничивается для сохранения желательного отношения мощности к скорости. Однако в аварийной ситуации системы отношение мощности к скорости удерживается до точки, где достигается полная мощность аварийной системы.
Обе пропульсивные системы могут иметь резервный режим, который обходит систему управления CPR. Это показано на фиг.2 с помощью управляющих входов 36', 42' и 46'. Использование этого режима можно выбирать независимо для каждой системы или одновременно для обеих систем.
Изобретение было описано с помощью определенных вариантов выполнения. Это не следует рассматривать как ограничение и возможны различные модификации внутри объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОВОРОТ ПРОПУЛЬСИВНОЙ УСТАНОВКИ | 2000 |
|
RU2267441C2 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2533869C1 |
| ПРИВОДНАЯ СИСТЕМА ГРЕБНОГО ВИНТА НАДВОДНОГО СУДНА И СПОСОБ ОБЕСПЕЧЕНИЯ ДВИЖЕНИЯ И УПРАВЛЕНИЯ ПО КУРСУ | 1999 |
|
RU2234439C2 |
| КОМБИНИРОВАННАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 2017 |
|
RU2655569C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ РЕГУЛИРОВАНИЯ ВИБРАЦИЙ ПРОПУЛЬСИВНОГО АГРЕГАТА СУДНА | 2016 |
|
RU2712467C1 |
| УСТРОЙСТВО В ПРОПУЛЬСИВНОЙ УСТАНОВКЕ | 2003 |
|
RU2304545C2 |
| СИСТЕМА И СПОСОБ СТОПОРЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПРОПУЛЬСИВНОЙ УСТАНОВКИ | 2003 |
|
RU2301173C2 |
| ПРОПУЛЬСИВНЫЙ АГРЕГАТ, ОСНАЩЕННЫЙ РУЛЕВЫМ УСТРОЙСТВОМ | 2016 |
|
RU2704695C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ СУДОВОЙ ГИДРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2009 |
|
RU2396182C1 |
| ИМПУЛЬСНЫЙ ЛОКОМОТОР | 2015 |
|
RU2659666C1 |
Изобретение относится к способу и устройству для управления судном, которое приводится в движение и/или управляется с помощью двух пропульсивных установок. Пропульсивный привод содержит по меньшей мере один первый привод гребного винта и по меньшей мере один второй привод гребного винта. Первый привод гребного винта вращает первый гребной винт и регулирует пропульсивную мощность и/или скорость вращения первого гребного винта. Второй привод гребного винта выполняет вращение и регулирование второго гребного винта. Пропульсивным приводом управляют с помощью единственной команды управления. При этом из команды управления формируют первый управляющий сигнал для управления первым приводом гребного винта и второй управляющий сигнал для управления вторым приводом гребного винта. Повышается эффективность управления приводным механизмом на судне, имеющим несколько пропульсивных устройств. 2 н. и 10 з.п. ф-лы, 3 ил.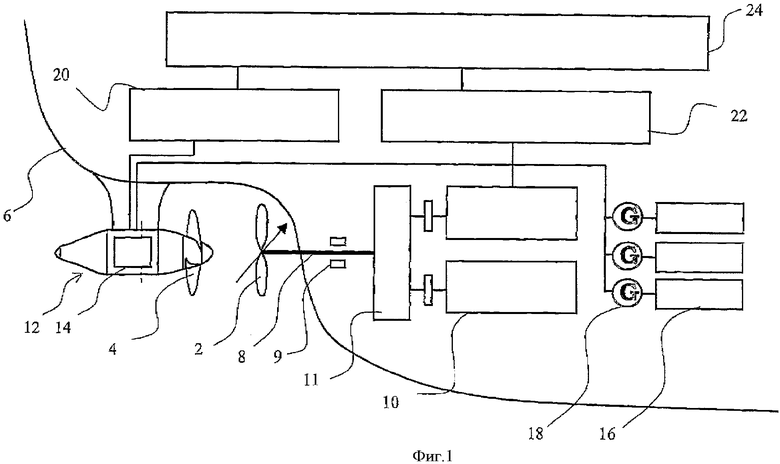
| US 5031561 A, 16.07.1991 | |||
| US 5795199 A, 18.08.1998 | |||
| Устройство для приведения в движение судов | 1924 |
|
SU1381A1 |

