Область техники, к которой относится изобретение
Настоящее изобретение относится к приводной системе гребного винта надводного судна и в особенности к системе, которая включает в себя силовую установку, выполненную с возможностью разворота относительно корпуса судна. Изобретение относится также к способу обеспечения движения судна и управления им по курсу.
Уровень техники
В большинстве случаев корабли, или суда (включая пассажирские суда и паромы, грузовые суда, лихтеры, нефтеналивные танкеры, ледоколы, суда прибрежного плавания, военные корабли и т.д.), приводятся в движение посредством полезной тяги, создаваемой вращающимся гребным винтом или несколькими винтами. Управление судами по курсу обычно осуществляется посредством отдельного рулевого устройства.
Традиционно приводы гребного винта, т.е. установки для обеспечения его вращения, включали размещенный внутри судового корпуса судовой двигатель (дизельную, газовую или электрическую силовую энергетическую установку). С двигателем связан гребной вал, проходящий через дейдвудное устройство, обеспечивающее уплотнение гребного винта в месте выхода из корпуса. Сам гребной винт находится на противоположном конце гребного вала, т.е. на конце, удаленном от корпуса. Гребной вал может быть связан с судовым двигателем либо непосредственно, либо через зубчатую передачу (редуктор). Подобная схема используется на большинстве надводных судов для того, чтобы развить тягу, необходимую для движения судна.
Недавно начали появляться суда с гребными валами, в которых двигатель (обычно электрический), обеспечивающий выработку необходимой мощности для гребного винта, вместе с необходимыми передачами находится вне корпуса судна внутри специальной камеры или силовой гондолы, выполненной с возможностью вращения относительно корпуса. Подобный узел может быть развернут относительно корпуса, и это означает, что он может быть использован вместо отдельного рулевого устройства также для руления судном (управления по курсу). Более конкретно, силовая гондола, содержащая двигатель, устанавливается на специальном трубчатом или каком-либо ином валу с возможностью разворота относительно корпуса судна; при этом данный вал проходит сквозь днище корпуса. Более подробно подобная судовая установка описана в патенте Финляндии №76977, принадлежащем заявителю данной заявки. Подобные установки получили название азимутальных силовых установок, причем заявитель данной заявки выпускает азимутальные установки этого типа под торговым наименованием AZIPOD.
Было обнаружено, что, помимо выгод, обусловленных отказом от длинного гребного вала и отдельного рулевого устройства, оборудование описанного типа дает также фундаментальное преимущество в отношении управляемости судном по курсу. Оказалось также, что достигается и экономия энергии. Применение азимутальных судовых установок на различных надводных судах в последние годы стало обычным и предполагается, что рост их популярности продолжится.
В соответствии с известными решениями устройства разворота азимутальных судовых установок обычно выполнялись таким образом, что зубчатое кольцо баллера руля или какая-либо другая кромка баллера прикреплялась к трубчатому валу, который образует ось разворота установки. Баллер разворачивается с помощью гидродвигателей, специально приспособленных для взаимодействия с баллером. Движение разворота баллера может быть остановлено в заданном положении, когда с помощью упомянутых гидродвигателей не производится выполнение никаких команд рулевого управления. По этой причине в гидравлической системе всегда поддерживается рабочее давление, даже когда судно движется по прямой.
В соответствии с одним известным решением используются четыре гидродвигателя, которые установлены с возможностью взаимодействия с поворотным ободом. Приводная система, которая обеспечивает гидравлическое давление, необходимое для работы гидродвигателей, содержит также гидравлический насос и электродвигатель, приводящий его во вращение. Чтобы повысить эксплуатационную надежность вращающихся зубчатых колес, гидродвигатели могут быть сгруппированы в двух отдельных гидравлических контурах, в каждом из которых используются собственные компоненты, обеспечивающие создание гидравлического давления.
Применение гидравлической системы было обусловлено, в частности, тем, что гидравлика позволяет получить довольно высокий вращательный момент при относительно низкой скорости вращения, необходимый для разворота азимутальной силовой установки. Кроме того, при использовании гидравлики управление судном по курсу путем разворота силовой установки может быть осуществлено довольно просто и достаточно точно с помощью традиционных клапанных распределителей и других соответствующих компонентов гидравлики. Как уже было упомянуто, одно из преимуществ, достигаемых в случае применения гидравлики, заключается в возможности быстро и точно остановить движение разворота силовой установки в заданном положении. При этом установка может удерживаться в таком положении, что рассматривается в качестве важного условия управления судном по курсу.
Однако было обнаружено, что с известной гидравлической системой, которая сама по себе может считаться эффективной и надежной, связан целый ряд проблем и недостатков. Для того чтобы реализовать известную систему разворота, суда должны оснащаться специальной, дорогой и сложной системой гидравлики, включающей в себя большое количество различных компонентов, хотя вращение самого гребного винта обеспечивается с помощью электродвигателя. Это, помимо прочего, означает потерю части выигрыша, обусловленного более эффективным использованием внутреннего объема судна, достигаемого в случае внешней азимутальной силовой установки. Кроме того, гидравлические системы требуют регулярного и довольно частого обслуживания и проверки, что ведет к повышению эксплуатационных затрат и может даже привести к снятию судна с эксплуатации на срок проведения мероприятий по его обслуживанию. Еще один недостаток гидравлических систем состоит в том, что для них характерна тенденция к утечкам масла или другой гидравлической жидкости, особенно из различных шлангов, стыков и зон уплотнений. Помимо дополнительных издержек, обусловленных утечками и, следовательно, дополнительным расходом гидравлической жидкости, это создает также проблемы охраны и очистки окружающей среды. Кроме того, утечки могут приводить к серьезным проблемам безопасности, поскольку поверхности, смоченные гидравлической жидкостью, становятся скользкими и вследствие этого опасными, кроме того, утечки гидравлической жидкости могут повышать пожароопасность. Внутреннее давление в гидравлической системе является довольно высоким, так что утечка в шланге может привести к возникновению тонкой струи масла под высоким давлением, которая может нанести серьезные повреждения обслуживающему персоналу. В процессе своего функционирования гидравлическая система может создавать значительные шумы, что, помимо прочего, ухудшает условия работы обслуживающего персонала. Этот шум является непрерывным, поскольку система должна быть в рабочем состоянии все то время, пока судно находится в движении. Далее, при использовании гидравлической системы движение разворота силовой установки происходит только с постоянной (т.е. единственной) скоростью. Однако существуют ситуации, в которых желательно обеспечить, по меньшей мере, еще одну скорость разворота.
Сущность изобретения
Таким образом, основная задача, решаемая настоящим изобретением, заключается в устранении недостатков известной технологии и в разработке нового варианта обеспечения разворота азимутальной силовой установки относительно корпуса судна.
Одна из задач, решаемых настоящим изобретением, состоит в том, чтобы устранить необходимость использования отдельной гидравлической системы и избежать при осуществлении разворота азимутальной силовой установки всех проблем, связанных с применением такой системы.
Еще одной задачей является решение проблемы повышения надежности и экономичности оборудования, применяемого для осуществления разворота азимутальной силовой установки, по сравнению с известными решениями.
Следующей задачей является решение проблемы снижения уровня шума, создаваемого оборудованием при развороте азимутальной силовой установки, по сравнению с известными решениями.
Еще одна задача состоит в разработке решения, позволяющего изменять и/или регулировать скорость разворота азимутальной силовой установки.
Дальнейшей задачей является решение проблемы снижения экологического риска, связанного с эксплуатацией оборудования для разворота азимутальной силовой установки, и повышения общего уровня чистоты и безопасности по сравнению с известными решениями.
Изобретение основано на новом принципе, заключающемся в том, что разворот азимутальной силовой установки обеспечивается связанным с ней напрямую электроприводом, который управляется от модуля управления, выполненного с возможностью обрабатывать как команды рулевого управления судном, так и информацию, поступающую от датчика, который определяет угловое положение азимутальной силовой установки.
Более конкретно, в соответствии с настоящим изобретением приводная система гребного винта для обеспечения движения надводного судна и управления им по курсу содержит азимутальную силовую установку, в состав которой входят силовая гондола, расположенная вне корпуса судна ниже ватерлинии, первый электродвигатель или аналогичный приводной агрегат, установленный внутри указанной гондолы для обеспечения вращения гребного винта, связанного с указанной гондолой, и узел вала, связанный с указанной гондолой и несущий ее с возможностью разворота гондолы относительно корпуса судна, а также приводные средства для обеспечения разворота указанной азимутальной силовой установки относительно корпуса указанного судна для управления судном по курсу в соответствии с командой рулевого управления, поступающей от устройства рулевого управления судном.
Одна из главных отличительных особенностей приводной системы по изобретению состоит в том, что приводные средства содержат второй электродвигатель для разворота указанной азимутальной силовой установки через механическую силовую передачу, связанную со вторым электродвигателем. При этом система дополнительно содержит источник питания для подачи электрической энергии на указанный второй электродвигатель и модуль управления для управления работой указанного второго электродвигателя посредством управления указанным источником питания.
Как уже упоминалось, модуль управления выполнен с возможностью совместной обработки команды рулевого управления, поступающей от указанного устройства рулевого управления судном, и позиционной информации об угловом положении, поступающей от указанного датчика, и с возможностью управления работой указанного второго электродвигателя на основе результатов указанной обработки.
В соответствии с одним из предпочтительных вариантов реализации изобретения в состав приводных средств, или силовой передачи, с помощью которой обеспечивается разворот азимутальной силовой установки, входят круговой зубчатый обод, закрепленный на узле вала, а также шестерня, червяк или аналогичный зубчатый компонент, выполненные с возможностью взаимодействия с указанным зубчатым ободом. В этом случае поворот зубчатого компонента производится посредством редуктора, установленного между зубчатым ободом и вторым электродвигателем.
Желательно также снабдить систему по изобретению соответствующим средством торможения для обеспечения остановки разворота азимутальной силовой установки и удержания ее в заданном положении, а также обеспечить функциональную связь между этим средством торможения и модулем управления с целью передачи на это средство команд управления. В соответствии с одним из предпочтительных вариантов средство торможения, с помощью которого регулируется скорость разворота, функционально связано с инвертором переменного тока (ПТ-инвертором), который входит в состав источника питания. Указанное средство торможения может представлять собой тормоз, например фрикционный или магнитный, выполненный отдельно от второго электродвигателя.
Решение задач, поставленных перед изобретением, предусматривает также создание нового способа обеспечения движения и управления по курсу надводным судном. Согласно данному способу судно приводят в движение посредством азимутальной силовой установки, содержащей силовую гондолу, расположенную вне корпуса судна ниже ватерлинии, первый электродвигатель или аналогичный приводной агрегат, установленный внутри гондолы для обеспечения вращения гребного винта, связанного с указанной гондолой, и узел вала, связанный с гондолой и несущий ее с возможностью разворота гондолы относительно корпуса судна. При этом азимутальную силовую установку разворачивают относительно корпуса указанного судна в соответствии с командой рулевого управления, поступающей от устройства рулевого управления судном.
Основной отличительной особенностью способа по изобретению является наличие в нем следующих операций:
посредством датчика, функционально связанного с модулем управления, определяют угловое положение азимутальной силовой установки по курсу,
в модуле управления производят обработку информации, содержащейся в команде рулевого управления, поступившей от указанного устройства управления, и информации об угловом положении, поступающей от указанного датчика,
основываясь на результатах указанной обработки, разворачивают азимутальную силовую установку через механическую силовую передачу, связанную с вторым электродвигателем, и
подают электрическую мощность на второй электродвигатель также на основе результатов указанной обработки.
Разворот азимутальной силовой установки предпочтительно осуществляют посредством кругового зубчатого обода, шестерни или червяка, выполненных с возможностью взаимодействия с указанным зубчатым ободом, и редуктора, установленного между указанным зубчатым ободом и указанным вторым электродвигателем.
Питание указанного второго электродвигателя целесообразно осуществлять через ПТ-инвертор, а требуемую регулировку скорости разворота указанной азимутальной силовой установки производить посредством соответствующей регулировки электрической мощности, поступающей от указанного ПТ-инвертора. В этом случае остановку разворота указанной азимутальной силовой установки и/или ее удержание в развернутом положении осуществляют с помощью средства торможения, управляемого от ПТ-инвертора. В одном из вариантов предлагаемого способа торможение разворота указанной азимутальной силовой установки осуществляют посредством электрического генератора, связанного с азимутальной силовой установкой через механическую силовую передачу, с подачей генерируемой при этом электрической энергии в электрическую сеть. При этом в качестве электрического генератора используют указанный второй электродвигатель, работающий в режиме генератора.
Кроме того, согласно предпочтительному варианту реализации способа по изобретению обработку указанной команды рулевого управления и указанной позиционной информации в модуле управления производят посредством устройства обработки данных, такого как микропроцессор или модуль управления мощностью.
Настоящее изобретение обеспечивает получение нескольких существенных преимуществ. Благодаря ему становится возможным отказаться от известной системы, основанной на использовании гидравлики, и тем самым устранить названные выше проблемы, связанные с таким использованием. Суммарная экономия, достигаемая применением электродвигателя, значительна, а требования по обслуживанию практически отсутствуют. Система разворота на основе электропривода является, кроме того, высоконадежной. На современных судах обеспечение электроэнергией не является проблемой, причем она используется во многих частях судна (в частности, азимутальная силовая установка также содержит электродвигатель). Следовательно, устраняется необходимость применения отдельной (дорогостоящей) гидравлической системы. Появляется также возможность использования электропривода, обеспечивающего разворот азимутальной силовой установки с регулируемой скоростью.
Перечень фигур чертежей
Далее настоящее изобретение, а также его различные аспекты и преимущества будут подробно описаны на примере предпочтительных вариантов его выполнения и со ссылками на прилагаемые чертежи, где сходные компоненты обозначены на разных фигурах теми же числовыми обозначениями.
На фиг.1 дана упрощенная принципиальная схема одного из вариантов выполнения системы по настоящему изобретению.
На фиг.2 приведена блок-схема системы по фиг.1.
На фиг.3 изображена силовая установка, смонтированная на судне.
На фиг.4 в форме диаграммы представлено оборудование, входящее в состав системы углового перемещения в соответствии с другим вариантом выполнения изобретения.
На фиг.5 дан график последовательности операций, выполняемых системой углового перемещения по настоящему изобретению.
Сведения, подтверждающие возможность осуществления изобретения
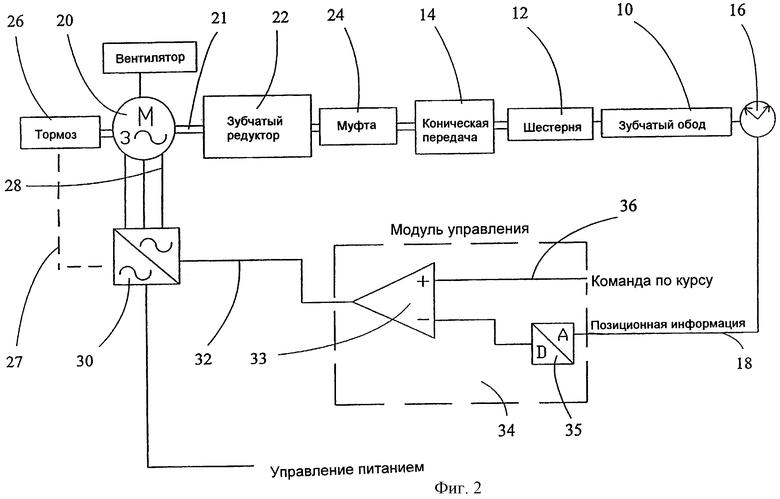
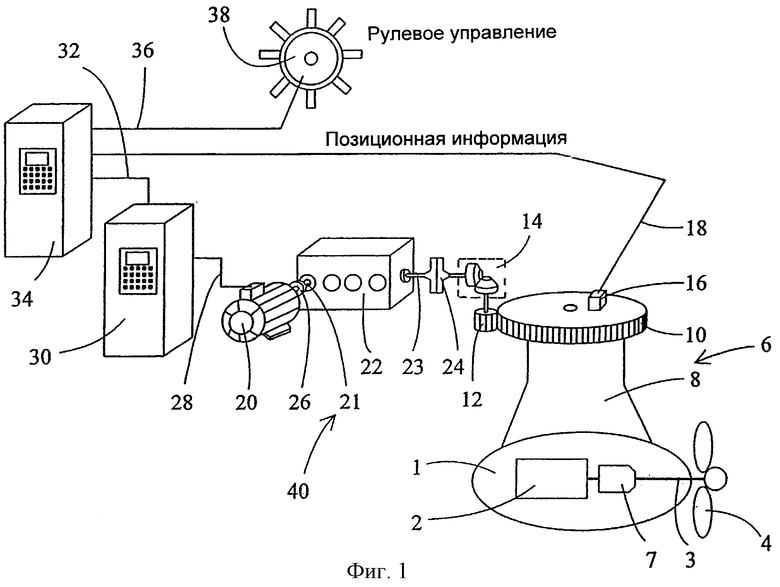
На фиг.1 в виде упрощенной принципиальной схемы, а на фиг.2 в виде блок-схемы представлен один из вариантов системы углового перемещения по настоящему изобретению. На фиг.3 изображена азимутальная силовая установка 6, размещенная на судне 9. Более конкретно, на фиг.1 представлена азимутальная силовая установка 6, в состав которой входит герметичная силовая гондола 1. Внутрь гондолы 1 помещен первый электродвигатель 2 (электродвигатель гребного вала), в качестве которого может быть применен любой подходящий двигатель известного типа. Электродвигатель 2 связан известным способом посредством гребного вала 3 с гребным винтом 4.
Согласно одному из альтернативных вариантов внутри указанной гондолы 1 может быть предусмотрена зубчатая передача, входящая в состав установки и расположенная между указанным электродвигателем 2 и гребным валом 4. В одном из вариантов с каждой гондолой связан более чем один гребной винт. В таком случае может иметься, например, два гребных винта, один из которых расположен впереди, а другой позади гондолы.
Указанная гондола 1 установлена с возможностью поворота вокруг вертикальной оси и связана с не изображенным на фиг.1 корпусом судна (см. также фиг.3) посредством, по существу, вертикального узла 8 вала (подшипники этого узла на фиг.1 не изображены; один из альтернативных вариантов его выполнения приведен в указанном патенте Финляндии №76977, который включен в данную заявку посредством ссылки на него). Указанный узел 8 (представляющий собой, по сути, полый вал трубчатой конструкции) может иметь достаточно большой диаметр, чтобы обеспечить обслуживание двигателя, расположенного под этим узлом, в гондоле, а также зубчатой передачи, которая может входить в состав установки, и гребного вала.
Зубчатый обод 10 или функционально аналогичный зубчатый обод баллера является круговым, т.е. расположенным по всей окружности указанного узла 8 вала; он соединен с указанным узлом 8 для передачи на него мощности, необходимой для осуществления поворота этого узла относительно корпуса судна. Когда узел 8 вала поворачивается, вместе с ним разворачивается и силовая установка 6. В варианте, показанном на фиг.1, комплект оборудования, входящего в силовую передачу 40 для осуществления поворота указанного зубчатого обода 10, включает в себя шестерню 12, коническую зубчатую передачу 14, муфту 24, зубчатый редуктор 22 и второй электродвигатель 20, а также валы 21, 23 между названными элементами. Показано также средство 26 торможения, установленное на валу 21, и вентилятор для охлаждения двигателя 20. В изображенном варианте средство 26 торможения представляет собой дисковый тормоз с соответствующим приводом. Следует отметить, что в рамках настоящего изобретения не все из перечисленных компонентов являются обязательной частью указанной передачи 40; соответственно, некоторые из них могут быть опущены или заменены другими компонентами.
Электрическая энергия поступает на электродвигатель 20 по кабелю 28 от ПТ-инвертора 30 (инвертора переменного тока), который работает как источник питания (мощности). Принципы работы инвертора должны быть известны специалисту в данной области техники, поэтому в их изложении нет необходимости. Достаточно отметить, что основными силовыми компонентами инвертора являются выпрямитель, промежуточный контур постоянного тока и инвертирующая схема. В настоящее время инверторы переменного тока находят широкое применение, в том числе и в качестве входных устройств для двигателей переменного тока. Особенно эффективны они для применения в различных управляемых электроприводах. Наиболее распространенными среди ПТ-инверторов являются ШИМ-инверторы, в которых используется широтно-импульсная модуляция и в которых имеется промежуточный контур регулировки напряжения.
Использование ПТ-инвертора эффективно, в том числе и потому, что он позволяет регулировать угловую скорость поворотного оборудования, входящего в комплект 40, и следовательно, скорость вращения указанного узла 8. В соответствии с одним из вариантов используется, по меньшей мере, две различные скорости. Согласно другому варианту скорость вращения может регулироваться в пределах некоторого интервала скоростей, например от 0 до номинальной скорости вращения.
Управление работой ПТ-инвертора 30 обеспечивается модулем 34 управления (таким, как сервопривод рулевого управления) по линии 32. Указанный модуль 34 управления, в свою очередь, функционально связан с устройством рулевого управления, например со штурвалом 38, установленным на капитанском мостике или в другой соответствующей части судна. Команды управления по курсу, выдаваемые вручную, т.е. поворотом штурвала, преобразуются, например, посредством отдельных аналоговых сервомеханизмов в команды рулевого управления. В соответствии с другим вариантом команды управления с помощью соответствующего преобразователя, связанного со штурвалом, преобразуются в цифровые курсовые сигналы, которые по линии 36 посылаются на модуль 34 управления.
Указанный модуль 34 управления использует информацию, содержащуюся в командах управления по курсу, формируемых штурвалом 36, для управления ПТ-инвертором. Инвертор, в свою очередь, обеспечивает питание двигателя 20 током. Результирующее вращение двигателя (с заданной скоростью) в направлении по или против часовой стрелки приводит к желаемому изменению углового положения указанного узла 8 вала и, следовательно, силовой установки 6.
Модуль 34 управления может представлять собой любое подходящее устройство обработки данных и/или управляющее устройство, сервопривод рулевого управления (например, так называемый аналоговый сервомеханизм) или другое соответствующее устройство, способное осуществлять обработку команд рулевого управления и другой информации, связанной с рулением (которая будет рассмотрена далее), а также управлять ПТ-инвертором или аналогичным силовым модулем на основе результатов указанной обработки.
На фиг.1 и 2 показан также датчик 16 углового положения, механически связанный с азимутальной силовой установкой 6 (в частном случае он установлен на зубчатом ободе 10) и предназначенный для определения угла поворота указанного узла 8. Для этой цели могут быть использованы различные датчики, которые сами по себе известны. Так, датчик 16 может быть построен на основе фотооптического датчика, так называемого сельсина, или датчика, основанного на системах машинного или компьютерного зрения, способных измерять угол поворота. Следует заметить, что конкретный тип датчика 16 не оказывает существенного влияния на воплощение настоящего изобретения; важно лишь, чтобы с помощью применяемого датчика надежно определялось направление, по которому ориентирована азимутальная силовая установка.
Датчик 16 углового положения имеет функциональную связь 18 с модулем 34 управления для того, чтобы передавать на этот модуль позиционные сигналы. Указанная связь 18 может представлять собой, например, кабель или радиоканал. Система по изобретению может также содержать аналого-цифровой преобразователь 35 (АЦП) для преобразования аналогового позиционного сигнала, поступающего от датчика 16, в цифровой формат, в котором возможна его обработка в модуле 34 управления (если данный модуль требует выполнения подобного преобразования).
Модуль 34 управления выполнен с возможностью совместной обработки в процессоре 33 или в аналогичном ему устройстве обработки данных информации, которую он получил от указанного датчика 16 положения, с командами рулевого управления, полученными от указанного устройства 38 рулевого управления, и с возможностью управления на основе полученных результатов работой ПТ-инвертора 30 или аналогичного силового модуля, как это показано на фиг.2.
На фиг.1 и 2 представлено уже упоминавшееся средство 26 торможения. Оно предназначено для того, чтобы останавливать движение поворота силовой установки 6 в заданном положении и удерживать установку в зафиксированном положении все то время, пока не выдается никаких команд рулевого управления. Управление функционированием указанного средства 26 торможения (в частности, временными характеристиками и усилием при торможении и удержании) может осуществляться благодаря наличию функциональной связи между этим средством и модулем управления, осуществляющим управление системой. Согласно предпочтительному варианту, изображенному на фиг.2, управление работой указанного средства 26 торможения обеспечивается с помощью указанного ПТ-инвертора 30, который, в свою очередь, получает команды рулевого управления от модуля 34 управления. Описанный вариант обеспечения торможения позволяет использовать для управления торможением также информацию, исходящую от датчика 16. В результате ориентация гребного винта, т.е. направление тягового усилия, которое обеспечивает движение судна, может быть отрегулирована с высокой точностью.
Средство торможения может представлять собой механический фрикционный тормоз (в частности, дисковый или барабанный тормоз, тормозные башмаки) или же магнитный тормоз, который может быть размещен в соответствующей части комплекта оборудования силовой передачи 40 или даже обеспечивать торможение/удержание непосредственно узла 8 вала силовой установки 6. В соответствии с одной из возможных альтернатив указанный редуктор 22 или шестерня, непосредственно взаимодействующая с зубчатым ободом 10, выполняются таким образом, чтобы обеспечить торможение любого углового перемещения, исходящего от силовой установки 6, но способствовать движению поворота, исходящего от указанного двигателя 20. Другими словами, эти компоненты выполнены таким образом, что допускают передачу вращательного движения только в одном направлении.
Еще один возможный вариант состоит в том, чтобы использовать для торможения/удержания сам электродвигатель 20. В этом случае с помощью указанного ПТ-инвертора 30 и указанного модуля 34 управления обеспечивается управление усилием, формируемым двигателем 20, таким образом, чтобы достичь получения желательного контролируемого эффекта торможения/удержания. Торможение/удержание может полностью обеспечиваться с помощью электродвигателя 20. Альтернативно, двигатель может генерировать только какую-то долю от требуемого усилия торможения/удержания. В этом случае торможение завершается с помощью отдельных средств торможения. В последнем случае достигается уменьшение усилия торможения, которое должен развивать механический тормоз. В соответствии с еще одним вариантом указанный электродвигатель 20 во время торможения работает как генератор, причем электрическая энергия, генерируемая при торможении, подается в электрическую сеть. Желательно, чтобы электрическая сеть была той же самой сетью, которая обеспечивает питание электрической машины, входящей в состав комплекта оборудования, когда она функционирует как электродвигатель.
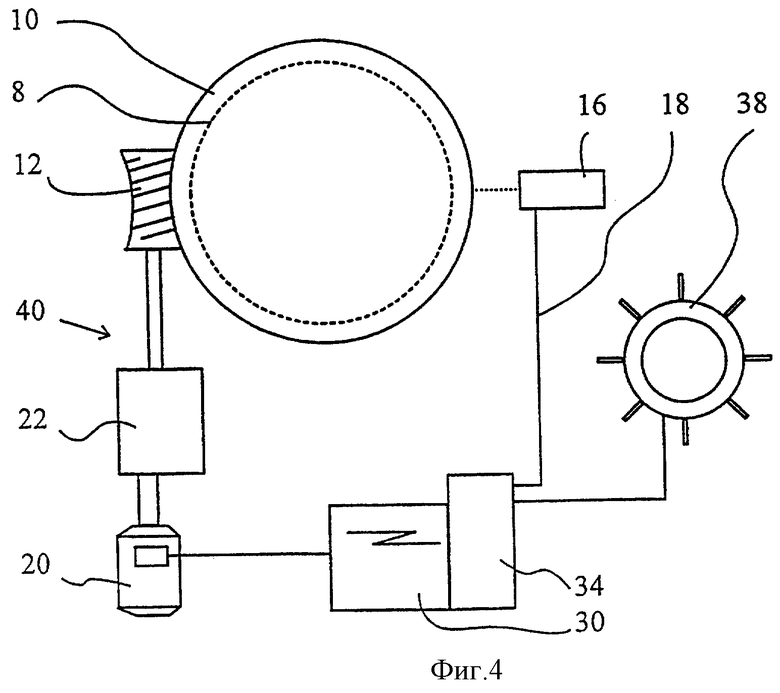
На фиг.4 представлен вариант системы по изобретению, ориентированный на получение наиболее компактной и простой структуры. Как показано на фиг.4, указанный зубчатый обод 10 приводится во вращение посредством червяка 12, непосредственно связанного с указанным зубчатым редуктором 22. Однако при этом следует отметить, что хотя в вариантах, представленных на фиг.1 и 4, имеется зубчатый обод 10 и средства 12 для обеспечения его поворота, применение зубчатого обода не является обязательным. Возможны и другие решения, обеспечивающие передачу мощности от указанного двигателя к указанному узлу 8. К таким решениям, например, относится использование электродвигателя, статорная обмотка которого охватывает по периметру узел 8 вала. В этом случае под силовой передачей подразумеваются любые средства, обеспечивающие передачу мощности от указанного двигателя на указанный узел 8.
Фиг.4 иллюстрирует также другой вариант выполнения датчика. В этом варианте использован бесконтактный датчик 16, установленный вблизи, но тем не менее отдельно от узла вала силовой установки. Указанный датчик воспринимает метки, распределенные по периферии узла вала, и на основе этой информации вырабатывает позиционный сигнал.
На фиг.5 приведен график последовательности операций, выполняемых системой согласно настоящему изобретению. В соответствии с принципами изобретения движение судна обеспечивается посредством азимутальной силовой установки. Ориентация (направление по курсу) силовой установки отслеживается посредством датчика. Информация, поступающая от датчика, может использоваться в аналоговом формате или, если это необходимо, преобразовываться в цифровую форму. До поступления новой команды на изменение курса положение азимутальной силовой установки удерживается соответствующим последней команде, полученной с капитанского мостика. Если анализ позиционной информации указывает на необходимость коррекции положения (вследствие отклонения от заданного курса, проскальзывания в тормозе или каких-либо иных причин), она может быть проведена автоматически.
Когда необходимо произвести поворот судна, в модуль управления поступает соответствующая команда. Эта команда обрабатывается в модуле управления согласно установленному порядку. При этом используется новейшая позиционная информация, полученная от датчика. По завершении указанной обработки модуль управления выдает команду на разворот азимутальной силовой установки на соответствующие компоненты системы по изобретению, в состав которой входит электродвигатель. Управление электродвигателем осуществляется посредством управления источником мощности, таким как инвертор. Обеспеченное таким образом вращение электродвигателя через механическую передачу преобразуется в заданный разворот азимутальной силовой установки; в результате судно соответственно изменяет свой курс.
Таким образом, настоящее изобретение обеспечивает создание системы и способа, которые представляют собой новое решение проблемы управления по курсу для судна, оборудованного азимутальной силовой установкой. Данное решение позволяет устранить ряд недостатков, присущих уровню техники, и обладает преимуществами упрощения конструкции, повышенной экономичности, удобством управления и безопасностью. Следует отметить, что описанные варианты осуществления настоящего изобретения не ограничивают объема его правовой охраны, который определяется формулой изобретения. Напротив, формула изобретения охватывает все модификации, эквивалентные и альтернативные варианты, которые соответствуют принципам и объему изобретения, определяемому формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОВОРОТ ПРОПУЛЬСИВНОЙ УСТАНОВКИ | 2000 |
|
RU2267441C2 |
| СИСТЕМА И СПОСОБ СТОПОРЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПРОПУЛЬСИВНОЙ УСТАНОВКИ | 2003 |
|
RU2301173C2 |
| СУДОВАЯ СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ С ДВУХВИНТОВЫМ ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫМ МОДУЛЕМ С ДВИГАТЕЛЯМИ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2012 |
|
RU2522733C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2342282C2 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2533869C1 |
| ГЛУБОКОВОДНЫЙ ОПУСКАЕМЫЙ АППАРАТ ПРЕДЕЛЬНЫХ ГЛУБИН | 2002 |
|
RU2203833C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ СУДОВОЙ ГИДРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2009 |
|
RU2396182C1 |
| СУДОВАЯ ДВИЖИТЕЛЬНАЯ УСТАНОВКА | 2014 |
|
RU2583125C1 |
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2022 |
|
RU2778403C1 |
| СИСТЕМА И СПОСОБ МОНТАЖА ГРЕБНОГО АГРЕГАТА | 2016 |
|
RU2647298C1 |


Изобретение относится к судостроению, в частности к приводной системе гребного винта, а также к способу обеспечения движения судна и управления им по курсу. Система содержит азимутальную силовую установку (6) и приводные средства для разворота азимутальной силовой установки (6) с целью управления судном по курсу. Приводные средства содержат электродвигатель (20) для разворота указанной азимутальной силовой установки (6) через механическую силовую передачу (40), связанную с указанным электродвигателем. Источник питания (30) обеспечивает подачу на указанный электродвигатель (20) электрической энергии. Модуль (34) управления осуществляет управление работой электродвигателя (20) посредством управления указанным источником питания (30). Система включает в себя также датчик (16) для определения углового положения указанной азимутальной силовой установки (6). Модуль (34) управления выполнен с возможностью совместной обработки команды рулевого управления, поступающей от устройства (38) рулевого управления, и позиционной информации об угловом положении, поступающей от указанного датчика (16), и с возможностью управления работой указанного электродвигателя (20) на основе результатов указанной обработки. Изобретение направлено на упрощение конструкции приводной системы, повышение ее экономичности и безопасности. 2 н. и 10 з.п.ф-лы, 5 ил.
| US 5361024 А, 01.11.1994 | |||
| US 4611549 А, 16.09.1986 | |||
| Рулевое устройство | 1987 |
|
SU1500549A1 |
| US 3976023 А, 24.08.1976. | |||

