Изобретение относиться к авиадвигателестроению, а именно к управлению двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами.
Известен способ управления положением поворотных направляющих аппаратов компрессора газотурбинного двигателя (патент RU 115832 U1, МПК F02C 9/00, 14.12.2011 г.).
Недостатками известного способа является то, что при потере информации о фактическом положении направляющих аппаратов, например, при отказе датчиков положения, позиционирование направляющих аппаратов становится невозможным, что может привести к помпажу двигателя и, как следствие, к аварийной ситуации.
Техническим результатом, достигаемом при использовании заявленного изобретения, является повышение надежности системы управления двигателя без дополнительного резервирования датчиков положения направляющих аппаратов.
Указанный технический результат достигается тем, что в способе управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессора и вентилятора, включающим управление частотой вращения роторов низкого и высокого давления путем изменения расхода топлива в основную камеру сгорания, регулирование положения направляющих аппаратов по сигналу от датчика положения направляющих аппаратов соответствующего ротора, при этом до начала эксплуатации двигателя устанавливают соотношение приведенных частот вращения роторов для каждого режима работы двигателя, далее в ходе эксплуатации двигателя при отсутствии сигнала от датчика положения направляющих аппаратов одного из роторов, регулирование ротора с исправным датчиком положения направляющих аппаратов продолжают путем изменения расхода топлива в основную камеру сгорания, а ротор с неисправным датчиком положения направляющих аппаратов регулируют воздействием на угол установки его направляющих аппаратов исходя из установленного ранее соотношения приведенных частот вращения роторов.
Способ управления основан на том, что положение направляющих аппаратов однозначно определяет соотношение приведенных частот вращения роторов двухвального двигателя, и поэтому соотношение между приведенными частотами вращения роторов низкого давления (n1пp) и высокого давления (n2пр) n1пp=f(n2пp) на установившихся режимах работы двигателя достигается только в том случае, если направляющие аппараты установлены в положение, заданное программами n2nр=f(α2зад) или n1пр=f(α1зад), где α1зад и α2зад - заданные значения положения направляющих аппаратов компрессоров высокого и низкого давления соответственно. Для реализации соотношения n1пp=f(n2пp) частота вращения одного из роторов поддерживается воздействием на расход топлива в камеру сгорания, а частота вращения другого ротора при увеличении/уменьшении рассогласования поддерживается путем увеличения/уменьшения скорости перемещения исполнительного механизма направляющих аппаратов компрессора интегрирующего типа (например, гидроцилиндр), путем увеличения/уменьшения управляющего воздействия на исполнительный механизм.
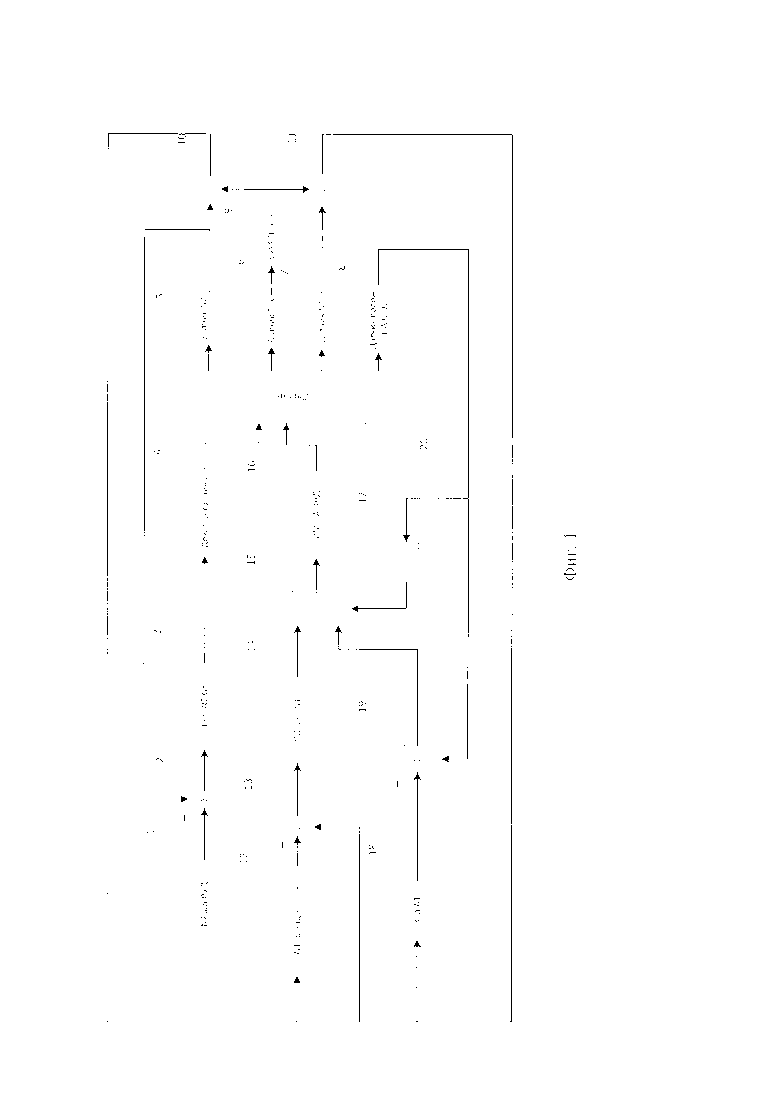
Сущность заявленного изобретения поясняется представленной на фиг. 1 схемой системы управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессора и вентилятора, посредством которой может быть реализован заявленный способ.
Система управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессора и вентилятора оснащена датчиками измерения параметров его работы, задатчиками измеряемых параметров и регуляторами параметров ГТД:
1. Задатчик частоты вращения ротора высокого давления (РВД)
2. Первый сумматор
3. Регулятор частоты вращения РВД
4. Дозатор топливный
5. Датчик частоты вращения РВ Д
6. Датчик температуры воздуха на входе в двигатель
7. Датчик частоты вращения ротора низкого давления (РНД)
8. Датчик положения направляющих аппаратов компрессора низкого давления (НА КНД)
9. ФП - функциональный преобразователь
10. Первый блок деления
11. Второй блок деления
12. Задатчик частоты вращения ротора низкого давления (РНД)
13. Второй сумматор
14. ПД - регулятор приведенной частоты вращения ротора низкого давления
15. Переключатель
16. Исполнительный механизм ИМ НА КНД интегрирующего типа
17. Блок диагностики
18. Задатчик положения НА КНД
19. Суммирующий усилитель
20. Двигатель
Система работает следующим образом:
В зависимости от положения РУД (на черт. 1 не показан) задатчик (1) частоты вращения ротора высокого давления (РВД) формирует заданное значение частоты вращения ротора высокого давления, в первом сумматоре (2) рассчитывается разность между заданным задатчиком (1) значением и значением частоты вращения РВД от датчика (5). Вычисленное первым сумматором (2) значение поступает на вход регулятора (3) частоты вращения ротора высокого давления, который формирует потребный расход топлива в двигатель для поддержания заданного задатчиком (1) значения частоты вращения ротора высокого давления. Выходной сигнал регулятора (3) частоты вращения ротора высокого давления подается на вход дозатора (4) топлива, который обеспечивает подачу топлива в камеру сгорания двигателя (20).
Управление положением направляющих аппаратов РНД может осуществляться по одной из двух программ, формируемым задатчиками (12) и (18).
Формируемая задатчиком (18) программа положения α1зад=f(n1пр) в зависимости от приведенной частоты вращения ротора низкого давления выполняется при исправном датчике (8) положения. Формируемая задатчиком (12) программа частоты вращения ротора низкого давления по приведенной частоте вращения (n1пp=f(n2пp)) выполняется при отказе датчика (8) положения НА КНД.
Сигнал с датчика (6) температуры воздуха на входе в двигатель поступает на функциональный преобразователь (ФП) (9), выходной сигнал которого (коэффициент приведения) поступает на вход блока (11) деления как делитель, а в качестве делимого на вход блока (11) подается сигнал с датчика (7) частоты вращения ротора низкого давления.
Выходным сигналом блока (11) является приведенная частота вращения ротора низкого давления, которая подается на вход задатчика (18) положения направляющих аппаратов компрессора низкого давления (НА КНД). На вход суммирующего усилителя (19) подается выход задатчика (18) и сигнал с датчика (8) положения направляющих аппаратов компрессора низкого давления. Выходом суммирующего усилителя (19) является сигнал управления направляющих аппаратов компрессора низкого давления.
Сигнал с датчика (6) температуры на входе в двигатель поступает на функциональный преобразователь (ФП) (9), выходной сигнал которого (коэффициент приведения) поступает как делитель на вход блока (10) деления, а сигнал с датчика (5) частоты вращения ротора высокого давления поступает как делимое на вход блока (10) деления. Выходной сигнал с блока (10) (приведенная частота вращения ротора высокого давления) является входным сигналом для блока (12) формирования программного значения частоты вращения ротора низкого давления, который формирует заданное значение частоты вращения ротора низкого давления как:
n1пр(зад)=f(n2пр)
где n1пр(зад) - заданное значение частоты вращения ротора низкого давления,
n2пр=n2/√(Твх/288) - приведенная частота вращения ротора высокого давления,
Твх - температура воздуха на входе в двигатель.
Второй сумматор (13) формирует разность заданного задатчиком (12) и сформированного делителем (11) значений приведенной частоты вращения РНД. Эта разность подается на вход ПД-регулятора (14) приведенной частоты вращения ротора низкого давления, выходной сигнал которого определяет скорость перемещения направляющих аппаратов. Сигнал с ПД-регулятора (14) приведенной частоты вращения ротора низкого давления поступает на вход переключателя (15) находящегося в положении регулирования резервным регулятором управления направляющих аппаратов компрессора низкого давления и далее сигнал с ПД-регулятора (14) приведенной частоты вращения ротора низкого давления поступает на исполнительный механизм (16) направляющих аппаратов компрессора низкого давления обеспечивающий перемещение направляющих аппаратов компрессора низкого давления.
Выбор программы управления направляющими аппаратами осуществляется переключателем (15). На первый вход переключателя поступает выходной сигнал ПД-регулятора (14) приведенной частоты вращения ротора низкого давления, на второй вход - выход суммирующего усилителя (19). Усилитель выполнен с высоким коэффициентом усиления, обеспечивающим быстрое позиционирование направляющих аппаратов в заданное задатчиком (18) положение. Выходом блока (17) диагностики является логический сигнал отказа датчика (8) положения направляющих аппаратов компрессора низкого давления. Этот сигнал равен нулю при исправном датчике положения, и единице при обнаружении отказа. Выход блока (17) диагностики поступает на управляющий вход переключателя (15), который при нулевом сигнале подключает к исполнительному механизму выход сумматора (18), а при единичном - выход ПД-регулятора (14) приведенной частоты вращения ротора низкого давления.
При применении исполнительного механизма направляющих аппаратов компрессора низкого давления интегрирующего типа, например, гидроцилиндра, скорость перемещения исполнительного механизма пропорциональна входному управляющему сигналу.
При этом, чем больше величина рассогласования, тем с большей скоростью реализуют перемещение исполнительного механизма, соответственно увеличивая или уменьшая величину управляющего воздействия на упомянутый исполнительный механизм.
Если фактическая приведенная частота вращения превышает заданное значение, ПД-регулятор (14) приведенной частоты вращения ротора низкого давления формирует сигнал на раскрытие направляющих аппаратов, в результате повышается мощность потребляемая компрессором низкого давления при практически неизменном заданном регулятором (1) частоты вращения ротора высокого давления расходе топлива. При уменьшении разности между программным и фактическим значениями скорость перемещения исполнительного механизма пропорционально снижается. За счет этого достигается плавный подход к равновесному значению частоты вращения, и, как следствие, устойчивость регулирования. Таким образом, обеспечивается устойчивое поддержание заданного режима работы двигателя в отказной ситуации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования авиационного турбореактивного двигателя | 2019 |
|
RU2731824C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2422682C1 |
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления | 2021 |
|
RU2778417C1 |
| Способ регулирования авиационного турбореактивного двухконтурного двигателя | 2016 |
|
RU2623605C1 |
| Способ регулирования авиационного турбореактивного двухконтурного двигателя | 2016 |
|
RU2623849C1 |
| Способ регулирования авиационного турбореактивного двухконтурного двигателя | 2016 |
|
RU2627627C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ДВУХВАЛЬНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2542631C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| Способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя | 2023 |
|
RU2823004C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2652267C2 |
Изобретение относится к авиадвигателестроению, а именно к управлению двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами. Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессора и вентилятора включает управление частотой вращения роторов низкого и высокого давления путем изменения расхода топлива в основную камеру сгорания, регулирование положения направляющих аппаратов по сигналу от датчика положения направляющих аппаратов соответствующего ротора. При этом до начала эксплуатации двигателя устанавливают соотношение приведенных частот вращения роторов для каждого режима работы двигателя, далее в ходе эксплуатации двигателя при отсутствии сигнала от датчика положения направляющих аппаратов одного из роторов частоту вращения данного ротора регулируют воздействием на скорость перемещения его направляющих аппаратов исходя из установленного ранее соотношения приведенных частот вращения роторов. Изобретение обеспечивает повышение надежности системы управления двигателя без дополнительного резервирования датчиков положения направляющих аппаратов. 1 ил.
Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессора и вентилятора, включающий управление частотой вращения роторов низкого и высокого давления путем изменения расхода топлива в основную камеру сгорания, регулирование положения направляющих аппаратов по сигналу от датчика положения направляющих аппаратов соответствующего ротора, отличающийся тем, что до начала эксплуатации двигателя устанавливают соотношение приведенных частот вращения роторов для каждого режима работы двигателя, далее в ходе эксплуатации двигателя при отсутствии сигнала от датчика положения направляющих аппаратов одного из роторов частоту вращения данного ротора регулируют воздействием на скорость перемещения его направляющих аппаратов исходя из установленного ранее соотношения приведенных частот вращения роторов.
| Устройство для телеизмерения | 1957 |
|
SU115832A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2653262C2 |
| Способ регулирования авиационного турбореактивного двухконтурного двигателя | 2016 |
|
RU2623605C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ДВУХВАЛЬНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2542631C1 |

