Изобретение относится к авиадвигателестроению, а именно к управлению двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами (НА) компрессоров высокого и низкого давления.
Наиболее близким к заявленному изобретению по технической сущности и достигаемому техническому результату является способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления, включающий управление частотой вращения роторов низкого и высокого давления путем изменения расхода топлива в основную камеру сгорания, регулирование положения направляющих аппаратов по сигналу от датчика положения направляющих аппаратов соответствующего ротора, отличающийся тем, что до начала эксплуатации двигателя устанавливают соотношение приведенных частот вращения роторов для каждого режима работы двигателя, далее в ходе эксплуатации двигателя при отсутствии сигнала от датчика положения направляющих аппаратов одного из роторов частоту вращения данного ротора регулируют воздействием на скорость перемещения его направляющих аппаратов исходя из установленного ранее соотношения приведенных частот вращения роторов (патент РФ 2696516 С1, 2019 г.).
В результате анализа данного способа необходимо отметить, что описанный способ управления может применяться для газотурбинных двигателей (ГТД) с одной группой регулируемых направляющих аппаратов (НА) или при потере информации с одной из двух групп регулируемых НА. В этом случае при потере информации о положении регулируемых НА способ управления выбирается однозначно. Если регулируемые НА имеют компрессоры и низкого (вентилятор), и высокого давления, то необходимо выбрать способ управления в зависимости от вида отказа. Представленный в прототипе способ управления эту задачу не решает, так же он не решает задачу обеспечения управляемости системы при потере информации с обеих групп регулируемых НА.
Техническая проблема изобретения заключается в повышении надежности системы управления.
Техническим результатом настоящего изобретения является обеспечение управляемости двигателя при отсутствии информации о положении направляющих аппаратов компрессоров.
Указанный технический результат достигается в способе управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления, с установленным номинальным соотношением приведенных частот вращения роторов для каждого режима работы двигателя, включающий управление частотами вращения роторов низкого и высокого давления путем изменения расхода топлива в основную камеру сгорания, регулирование положения направляющих аппаратов воздействуя на скорость их перемещения, при этом заранее выбирают порог по приведенной частоте вращения для одного из роторов, в диапазоне режимов работы двигателя ниже выбранного порога поддерживают частоту вращения ротора низкого давления воздействием на увеличение расхода топлива в основную камеру сгорания, при этом частоту вращения ротора высокого давления поддерживают исходя из номинального установленного соотношения приведенных частот вращения роторов воздействием на скорость перемещения направляющих аппаратов компрессора высокого давления, а в диапазоне режимов работы двигателя выше или равному выбранному порогу поддерживают частоту вращения ротора высокого давления воздействием на уменьшение расхода топлива в основную камеру сгорания, а частоту вращения ротора низкого давления поддерживают исходя из номинального установленного соотношения приведенных частот вращения роторов воздействием на скорость перемещения направляющих аппаратов компрессора низкого давления.
Сущность настоящего изобретения поясняется графическими материалами на которых представлены:
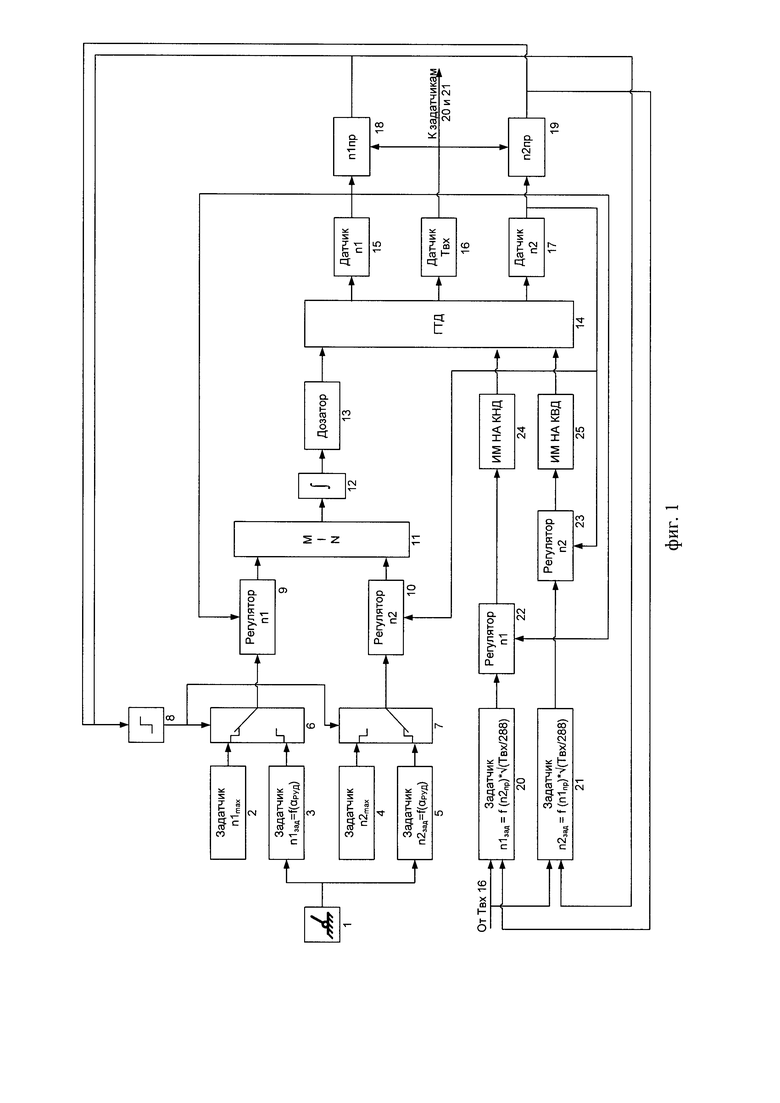
фиг. 1 - структурная схема системы управления, реализующая настоящий способ управления,
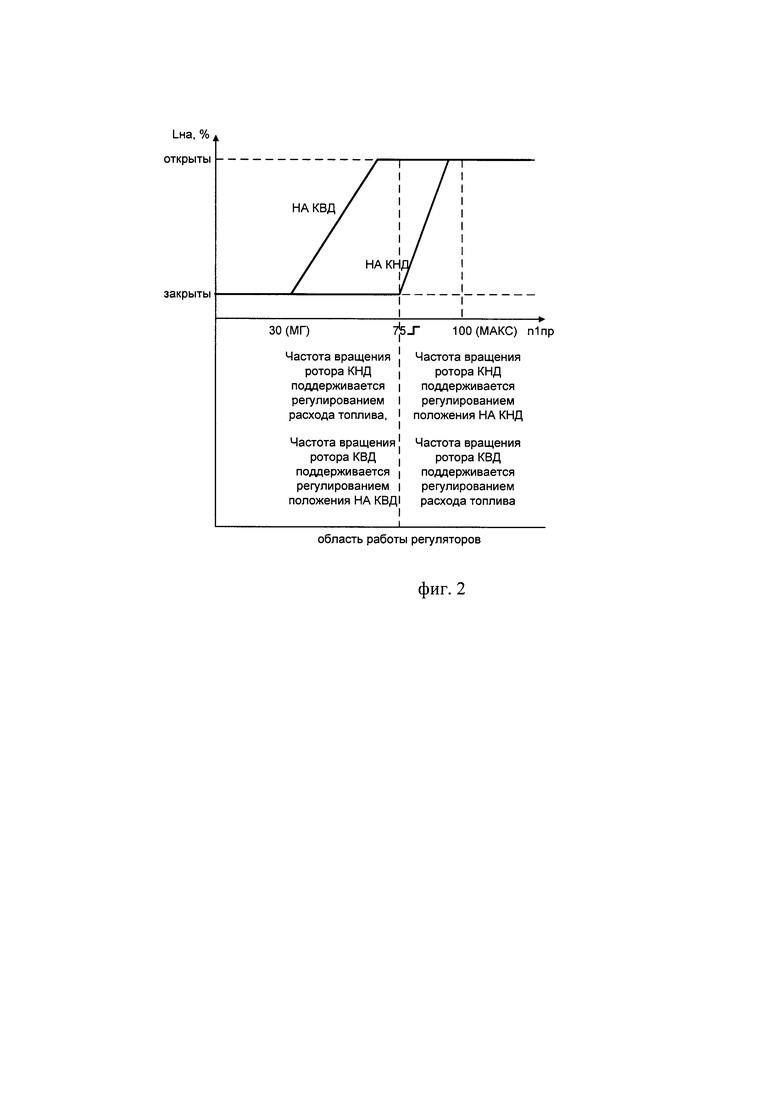
фиг. 2 - области работы регуляторов по режиму работы двигателя.
Система управления двухвальным ГТД содержит рычаг управления двигателем (РУД) 1 с датчиком положения (на рисунке не показан), задатчик 2 предельной частоты вращения ротора компрессора низкого давления (КНД), задатчик 3 заданной частоты вращения КНД от РУД, задатчик 4 предельной частоты вращения ротора компрессора высокого давления (КВД), задатчик 5 заданной частоты вращения КВД от РУД. Выход РУД 1 подключен к входам задатчиков 3 и 5.
Система содержит первый и второй управляемые переключатели 6 и 7. Выходы задатчиков 2 и 3 подключены к первому и второму функциональным входам первого переключателя 7, а выходы задатчиков 4 и 5 к аналогичным входам переключателя 7. К управляющим входам переключателей 6 и 7 подключен компаратор 8.
Система содержит регуляторы частот вращения роторов КНД 9 и КВД 10. К первым входам регуляторов 9 и 10 подключены выходы переключателей 6 и 7 соответственно. Выходы регуляторов 9 и 10 частот вращения роторов КНД и КВД подключены к первому и второму входу селектора 11 минимального уровня. Выход селектора 11 подключен к интегратору 12, который в свою очередь подключен к системе дозирования топлива 13 в основную камеру сгорания (КС, на рисунке не показана) ГТД 14.
Параметры работы ГТД 14 измеряются датчикам частоты вращения ротора КНД 15, температуры на входе в ГТД 16 и частоты вращения ротора КВД 17.
Система содержит функциональные преобразователи 18 и 19, формирующие приведенные частоты вращения ротора КНД и ротора КВД соответственно. К первому входу функционального преобразователя 18 подключен датчик 15 частоты вращения ротора КНД, к аналогичному входу функционального преобразователя 19 подключен датчик 17 частоты вращения ротора КВД. Ко вторым входам функциональных преобразователей 18 и 19 подключен датчик 16 температуры на входе в ГТД 14.
Система содержит задатчик 20 частоты вращения ротора КНД в зависимости от приведенной частоты вращения ротора КВД и температуры на входе в ГТД и задатчик 21 частоты вращения ротора КВД в зависимости от приведенной частоты вращения ротора КНД и температуры на входе в ГТД.
К первому входу задатчика 20 подключен выход датчика 16 температуры на входе в ГТД, к второму входу подключен выход функционального преобразователя 19, выход задатчика 20 подключен к первому входу регулятора 22 частоты вращения ротора КНД, к второму входу которого подключен выход датчика 15 частоты вращения ротора КНД.
К первому входу задатчика 21 подключен выход датчика 16 температуры на входе в ГТД, к второму входу задатчика 21 подключен выход функционального преобразователя 18, выход задатчика 21 подключен к первому входу регулятора 23 частоты вращения ротора КВД, к второму входу которого подключен выход датчика 17 частоты вращения ротора КВД.
Выходы регуляторов 22 и 23 подключены к входам исполнительных механизмов управления положением НА КНД 24 и КВД 25 соответственно.
Выход датчика 15 частоты вращения ротора КНД также подключен к второму входу регулятора 9, а выход датчика 17 частоты вращения ротора КВД - к второму входу регулятора 10.
В частном случае реализации выход функционального преобразователя 18 также подключен к входу компаратора 8.
В частном случае реализации выход функционального преобразователя 19 также подключен к входу компаратора 8.
Заявленная система может быть скомпонована из известных блоков и элементов.
Положение РУД 1 отслеживается стандартным линейным дифференциальным трансформатором для измерения линейных или угловых перемещений.
Задатчики 2 и 4 являются задатчиками постоянного значения, формирующими на своих выходах сигналы, равные максимально допустимым частотам вращения роторов КНД и КВД соответственно.
Задатчики 3 и 5 являются стандартными и реализуют выбранные заранее зависимости заданных частот вращения роторов КНД  и КВД
и КВД  соответственно в зависимости от значения сигнала РУД на входе:
соответственно в зависимости от значения сигнала РУД на входе:
Управляемые переключатели 6 и 7 являются стандартными. Переключатель 6 выбран таким образом, что при подаче логической единицы на его управляемый вход он подключает к своему выходу первый функциональный вход. Переключатель 7 выбран таким образом, что при подаче логической единицы на его управляемый вход он подключает к своему выходу второй функциональный вход.
Компаратор 8 является стандартным, с выбранным заранее порогом срабатывания. Порог срабатывания компаратора 8, при котором формируется единичный выходной сигнал, выбран из условия согласования управления расходом топлива и положением направляющих аппаратов и соответствует приведенной частоте вращения ротора КНД (или КВД в ином частном случае реализации), при которой должно осуществляться открытие НА КНД с нижнего механического упора, например n1np=75%.
В качестве регуляторов 9, 10, 22, 23 могут быть использованы стандартные ПИД-регуляторы.
Селектор 11, интегратор 12 являются стандартными.
В качестве датчиков параметров работы ГТД могут быть использованы индуктивные датчики частот вращения (15, 17) и терморезистивный датчик температуры (16).
Функциональные преобразователи 18 и 19 реализуют следующую известную функцию расчета приведенного параметра:
 где
где
Uвых - выходной сигнал функционального преобразователя,
U1 - сигнал на первом входе функционального преобразователя,
U2 - сигнал на втором входе функционального преобразователя.
Задатчик 20 формирует на своем выходе заданную частоту вращения ротора КНД для реализации установленного номинального соотношения роторов  или, в области физической частоты вращения ротора КНД:
или, в области физической частоты вращения ротора КНД:
 где:
где:
 - заданное значение частоты вращения ротора низкого давления,
- заданное значение частоты вращения ротора низкого давления,
 - приведенная частота вращения ротора высокого давления,
- приведенная частота вращения ротора высокого давления,
Твх - это температура на входе в двигатель.
Задатчик 21 формирует на своем выходе заданную частоту вращения ротора КВД для реализации установленного номинального соотношения роторов  или, в области физической частоты вращения ротора КВД:
или, в области физической частоты вращения ротора КВД:
 где:
где:
 заданное значение частоты вращения ротора высокого давления,
заданное значение частоты вращения ротора высокого давления,
 приведенная частота вращения ротора низкого давления,
приведенная частота вращения ротора низкого давления,
Твх - это температура на входе в двигатель.
Исполнительные механизмы управления положением НА КНД 24 и НА КВД 25 являются стандартными механизмами интегрирующего типа, например, гидроцилиндрами, скорость перемещения которых пропорциональна входному управляющему сигналу.
Система управления двухвальным ГТД с двумя группами регулируемых НА имеет три управляющих воздействия - расход топлива в КС ГТД и два положения НА, и регулируемые параметры - частоты вращения роторов КНД и КВД, причем все управляющее воздействия в разной степени влияют на регулируемые параметры.
В такой системе проблемой является обеспечение устойчивой работы регуляторов. Для обеспечения устойчивой работы ГТД необходимо перекладку каждой из групп НА из закрытого в открытое положение выполнять последовательно по мере повышения режима работы двигателя. При повышении режима с малого газа сначала должны открываться НА КВД при закрытых НА КНД. После того, как НА КВД будут установлены в открытое положение, начинается открытие НА КНД.
На каждом режиме работы двигателя одна из частот вращения роторов должна поддерживаться воздействием на расход топлива в КС ГТД, а другая - воздействием на скорость изменения положения НА.
Изменение положения НА КВД пропорционально изменяет потребляемую КВД мощность и частоту вращения ротора КВД при неизменном расходе топлива. При этом влияние на частоту вращения ротора КНД существенно ниже. Изменение положения НА КНД, напротив, существенно влияет на частоту вращения ротора КНД и практически не оказывает влияние на частоту вращения ротора КВД.
Поэтому негативный эффект влияния совместной работы управляющих воздействий на устойчивость системы управления будет минимально в том случае, если в области работы НА КВД регулировать частоту вращения ротора КВД воздействием на положение НА КВД, а частоту вращения ротора КНД воздействием на расход топлива. И наоборот - в области работы НА КНД регулировать частоту вращения ротора КНД воздействием на положение НА КНД, а частоту вращения ротора КВД воздействием на расход топлива.
Область работы регуляторов показана на фиг. 2, где в верхней его части условно представлены штатные (реализующие номинальное скольжение роторов) программы положения НА КНД и КВД в зависимости от приведенной частоты вращения ротора КНД, а в нижней указана связь управляющих воздействий и регулируемых параметров.
Программа  задатчика 20 выбирается таким образом, чтобы в области закрытых НА КНД заданная частота вращения ротора КНД заведомо приводила к формированию регулятором 22 сигнала на закрытие НА КНД, в области открытых - сигнала на открытие, и прижатия НА к механическим упорам, соответственно, в области, где НА КНД находятся в рабочем диапазоне, программа
задатчика 20 выбирается таким образом, чтобы в области закрытых НА КНД заданная частота вращения ротора КНД заведомо приводила к формированию регулятором 22 сигнала на закрытие НА КНД, в области открытых - сигнала на открытие, и прижатия НА к механическим упорам, соответственно, в области, где НА КНД находятся в рабочем диапазоне, программа  должна быть выбрана близкой к реальной (номинальной) линии скольжения двигателя при штатной программе положения НА КНД.
должна быть выбрана близкой к реальной (номинальной) линии скольжения двигателя при штатной программе положения НА КНД.
Программа  задатчика 21 выбирается аналогичным образом для привода НА КВД.
задатчика 21 выбирается аналогичным образом для привода НА КВД.
Система работает следующим образом.
Частные способы реализации настоящего способа отличаются только выбором сигнала по приведенной частоте вращения ротора низкого или высокого давления, дальнейшее описание приводится для частного случая реализации - по частоте вращения ротора низкого давления.
На режиме малого газа (МГ) ГТД частота вращения ротора КНД ниже порога срабатывания компаратора 8, и переключатель 6 установлен таким образом, что на вход регулятора 9 поступает сигнал с задатчика 3. При этом порог срабатывания компаратора 8 для переключения режима установлен для ротора низкого давления.
Таким образом, регулятор 9 формирует на своем выходе сигнал расхода топлива в КС ГТД для поддержания заданной частоты вращения ротора КНД от РУД. Переключатель 7 установлен так, что на вход регулятора 10 поступает сигнал с задатчика 4. Таким образом, регулятор 10 формирует увеличение расхода топлива для поддержания максимального режима работы ГТД по частоте вращения ротора КВД. Расход топлива, формируемый регулятором 10, существенно больше расхода топлива, формируемого регулятором 9, и селектор 11 минимального уровня выбирает сигнал регулятора 9. Данный сигнал поступает на вход интегратора 12. Интегратор 12 накапливает сигнал расхода топлива в КС ГТД от регулятора 9 и посредством системы дозирования 13 дозирует его в КС ГТД 14. При совпадении фактической частоты вращения ротора КНД, измеряемой датчиком 15, с частотой, заданной задатчиком 3, регулятор 9 сформирует на своем выходе сигнал равный нулю и интегрирование блоком 12 остановится. Режим двигателя перейдет в установившийся.
При движении РУД 1 в диапазоне от МГ до n1пр=75% срабатывания компаратора 8 не происходит, и система работает в режиме поддержания заданной частоты вращения ротора КНД воздействием на расход топлива.
Одновременно с этим функциональные преобразователи 18 и 19 по показаниям датчиков 15, 16, 17 рассчитывают приведенные значения частот вращения роторов КНД и КВД соответственно.
Согласно выбранной программе задатчика 20 регулятор 22, сравнивая заданную (задатчиком 20) и фактическую (от датчика 15) частоты вращения ротора КНД, формирует на своем выходе сигнал максимальной скорости закрытия НА КНД, который приводит в движение ИМ НА КНД 24. При достижении полностью закрытого положения гидроцилиндр ИМ НА КНД 24 прекращает свое движение. Обеспечивается закрытое положение НА КНД.
Выбранная программа задатчика 21 (совпадающая с номинальным скольжением роторов) может быть реализована только при штатном положении НА КВД. Любое отклонение положения НА КВД от своего номинального значения вызовет отклонение скольжения роторов двигателя от номинального - ошибку регулирования. Регулятор 23, сравнивая заданное задатчиком 21 номинальное значение частоты вращения ротора КВД с фактической, формируемой датчиком 17, формирует на своем выходе сигнал, пропорциональный ошибки регулирования, ИМ НА КВД 25 начнет движение, что вызовет изменение положения НА КВД, изменение скольжения роторов и уменьшение ошибки регулирования регулятора 23. При совпадении фактической и заданной частоты ротора КВД регулятор 23 сформирует на своем выходе нулевой сигнал, и ИМ НА КВД 25 остановится - НА КВД займут свое штатное положение.
Таким образом, система обеспечивает управление НА КВД по штатной программе управления без использования информации от датчиков положения НА КВД.
При переводе РУД 1 и повышении режима работы ГТД выше или равного порогу срабатывания компаратора 8, последний переводит переключатели 6 и 7 в иное положение: к входу регулятора 9 будет подключен выход задатчика 2, к входу регулятора 10 - выход задатчика 5. Регулятор 9 будет работать в режиме ограничения максимально допустимой частоты вращения ротора КНД, а регулятор 10 - в режиме поддержания заданной частоты вращения ротора КВД от РУД 1. До достижения частотой вращения ротора КНД максимально допустимой селектор 11 будет выбирать сигнал регулятора 10, и значение суммарного расхода топлива (значение интегратора 12) будет определяться регулятором 10 по сигналу обратной связи от датчика 17 частоты вращения ротора КВД.
Согласно выбранной программе задатчика 21 регулятор 23, сравнивая заданную (задатчиком 21) и фактическую (датчиком 17) частоты вращения ротора КВД, формирует на своем выходе сигнал максимальной скорости открытия НА КВД, который приводит в движение ИМ НА КВД 25. При достижении полностью открытого положения гидроцилиндр ИМ НА КВД 25 прекращает свое движение. Обеспечивается открытое положение НА КВД.
Выбранная программа задатчика 20 (совпадающая с номинальным скольжением роторов) может быть реализована только при штатном положении НА КНД. Любое отклонение положения НА КНД от своего номинального значения вызовет отклонение скольжения роторов двигателя от номинального - ошибку регулирования. Регулятор 22, сравнивая заданное задатчиком 20 номинальное значение частоты вращения ротора КНД с фактической, формируемой задатчиком 15, формирует на своем выходе сигнал пропорциональный ошибке регулирования, ИМ НА КНД 24 начнет движение, что вызовет изменение положения НА КНД, изменение скольжения роторов и уменьшение ошибки регулирования регулятора 22. При совпадении фактической частоты ротора КНД с заданной регулятор 22 сформирует на своем выходе нулевой сигнал и ИМ НА КНД 24 остановится - НА КНД займут свое штатное положение.
Для исключения совместной работы регулятора 22 и регулятора 9 в режиме ограничения максимальной частоты вращения ротора КНД целесообразно выбрать программу задатчика 20 так, чтобы НА КНД занимали свое полностью открытое положение при частоте вращения ротора КНД меньше максимальной, формируемой задатчиком 2. В этом случае при выходе на максимальный режим работы обе группы НА будут открыты, регуляторы 22 и 23 формируют сигналы на прижатие НА к уборам открытия, и осуществляется штатная система регулирования частот вращения роторов КНД и КВД воздействием на расход топлива.
Таким образом, настоящее изобретение позволяет осуществлять управление ГТД по штатным программам регулирования НА компрессоров без использования информации о положении групп НА, что повышает надежность системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя | 2023 |
|
RU2823004C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2009 |
|
RU2427722C1 |
| Способ управления газотурбинным двигателем самолета на режимах руления и разбега | 2023 |
|
RU2829124C1 |
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессора и вентилятора | 2018 |
|
RU2696516C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ДИНАМИЧЕСКИХ РЕЖИМАХ РАЗГОНА И ДРОССЕЛИРОВАНИЯ | 2006 |
|
RU2337250C2 |
| Способ управления газотурбинным двигателем самолета на режиме разбега | 2023 |
|
RU2825180C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2022 |
|
RU2774564C1 |
| Способ управления перепуском воздуха из компрессора низкого давления турбореактивного двухвального двигателя с высокой степенью двухконтурности | 2024 |
|
RU2836207C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКОНТУРНЫМ ДВУХВАЛЬНЫМ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347093C2 |
| Способ регулирования авиационного турбореактивного двухконтурного двигателя | 2016 |
|
RU2623605C1 |
Изобретение относится к авиадвигателестроению, а именно к управлению двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления. Техническая проблема изобретения заключается в повышении надежности системы управления. Техническим результатом настоящего изобретения является обеспечение управляемости двигателя при отсутствии информации о положении направляющих аппаратов компрессоров. Указанный технический результат достигается в способе управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления, с установленным номинальным соотношением приведенных частот вращения роторов для каждого режима работы двигателя, включающий управление частотами вращения роторов низкого и высокого давления путем изменения расхода топлива в основную камеру сгорания, регулирование положения направляющих аппаратов, воздействуя на скорость их перемещения, при этом заранее выбирают порог по приведенной частоте вращения одного из роторов, в диапазоне режимов работы двигателя ниже выбранного порога поддерживают частоту вращения ротора низкого давления воздействием на увеличение расхода топлива в основную камеру сгорания, при этом частоту вращения ротора высокого давления поддерживают исходя из номинального установленного соотношения приведенных частот вращения роторов воздействием на скорость перемещения направляющих аппаратов компрессора высокого давления, а в диапазоне режимов работы двигателя выше или равному выбранному порогу поддерживают частоту вращения ротора высокого давления воздействием на уменьшение расхода топлива в основную камеру сгорания, а частоту вращения ротора низкого давления поддерживают исходя из номинального установленного соотношения приведенных частот вращения роторов воздействием на скорость перемещения направляющих аппаратов компрессора низкого давления. 2 ил.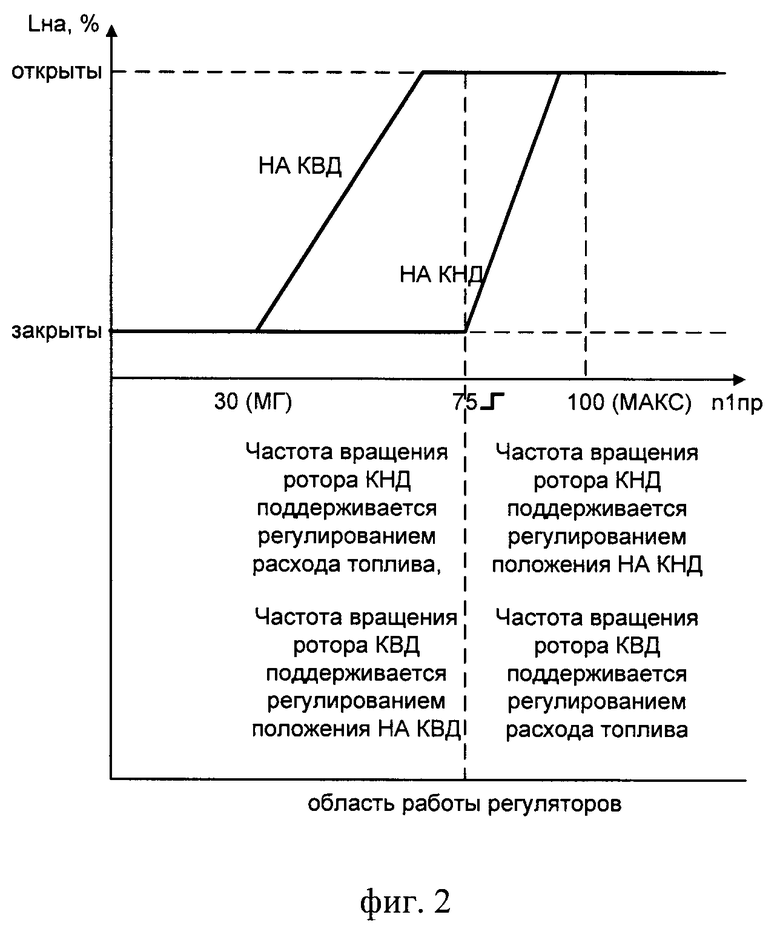
Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления, с установленным номинальным соотношением приведенных частот вращения роторов для каждого режима работы двигателя, включающий управление частотами вращения роторов низкого и высокого давления путем изменения расхода топлива в основную камеру сгорания, регулирование положения направляющих аппаратов, воздействуя на скорость их перемещения, отличающийся тем, что заранее выбирают порог по приведенной частоте вращения для одного из роторов, в диапазоне режимов работы двигателя ниже выбранного порога поддерживают частоту вращения ротора низкого давления воздействием на расход топлива в основную камеру сгорания, а частоту вращения ротора высокого давления поддерживают исходя из установленного номинального соотношения приведенных частот вращения роторов воздействием на скорость перемещения направляющих аппаратов компрессора высокого давления, а в диапазоне режимов работы двигателя выше или равному выбранному порогу поддерживают частоту вращения ротора высокого давления воздействием на расход топлива в основную камеру сгорания, а частоту вращения ротора низкого давления поддерживают исходя из установленного номинального соотношения приведенных частот вращения роторов воздействием на скорость перемещения направляющих аппаратов компрессора низкого давления.
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессора и вентилятора | 2018 |
|
RU2696516C1 |
| Устройство для телеизмерения | 1957 |
|
SU115832A1 |
| Способ регулирования авиационного турбореактивного двухконтурного двигателя | 2016 |
|
RU2623605C1 |

