Область техники, к которой относится изобретение
Настоящее изобретение относится к регенерации ловушки обедненных окисей азота (NOx) для двигателя дорожного автомобиля и, в частности, к способу и устройству для улучшения продувки NOx из ловушки обедненных окисей азота (ЛООА) в ходе работы дорожного автомобиля.
Уровень техники/Раскрытие изобретения
ЛООА представляет собой устройство дополнительной обработки отработавших газов для двигателей, сжигающих обедненную смесь. ЛООА нужно периодически продувать для освобождения и преобразования окисей азота (NOx), накапливаемых в ЛООА в течение работы двигателя. Для выполнения продувки двигатель должен работать с воздушно-топливным отношением смеси, обогащенным относительно стехиометрического. В результате работы на обогащенной смеси образуется значительное количество монооксида углерода (СО) и углеводородов (НС) для преобразования накопленных NOx. Как правило, режим продувки активируют исходя из расчетной загрузки ЛООА. То есть, когда расчетная масса NOx, накопленная в ЛООА, превышает заданное пороговое значение, может быть инициирован переход в режим продувки. Работа на обогащенной смеси продолжается в течение нескольких секунд до освобождения ЛООА от накопленных NOx, после чего режим продувки завершают и возобновляют нормальную работу двигателя на обедненной смеси. Завершение продувки обычно инициируют посредством изменения показания датчика кислорода, такого как нагреваемый датчик кислорода в отработавших газах (НДКОГ) или датчик NOx, расположенный ниже по потоку от ЛООА, или инициируют исходя из смоделированного прогноза состояния ЛООА. Так как двигатель должен работать на обогащенной относительно стехиометрической смеси в течение режима продувки, продувка оказывает значительный негативный эффект на топливную экономичность, по сравнению с топливной экономичностью при работе на обедненной смеси, и, таким образом, желательно оптимизировать момент продувки в целях снижения потерь топливной экономичности.
Хорошо известно, что регенерация устройства дополнительной обработки ЛООА может быть выполнена более эффективно при работе автомобиля особым образом, например, при высокой нагрузке из-за снижения проигрыша по расходу топлива.
Также известно, что при заполнении ЛООА окисью азота повышается риск проскальзывания NOx из ЛООА. Проскальзывание NOx из ЛООА приводит к повышению выбросов автомобиля и, таким образом, нежелательно.
Было предложено, например, в патенте США 7,685,813, прогнозирование будущего характера эксплуатации автомобиля посредством использования навигационной системы. Навигационная система, такая как система GPS, используется для прогнозирования будущего маршрута, на основе которого можно определить предполагаемый характер эксплуатации автомобиля при его перемещении по маршруту, который можно использовать для принятия решения при существовании хороших условий для продувки ЛООА. Однако применение навигационной системы для прогнозирования будущего характера эксплуатации или работы автомобиля не всегда возможно, потому что не все автомобили подходят для установки такого навигационного оборудования.
Авторы настоящего изобретения установили, что путем использования знаний о будущей работе автомобиля можно запланировать регенерацию ЛООА, когда предполагают работу двигателя автомобиля заданным образом, подходящим для продувки NOx из ЛООА. Авторы настоящего изобретения также установили, что путем использования знаний о будущей работе автомобиля, возможна продувка ЛООА до такой работы автомобиля, при которой более вероятно образование проскальзывания NOx из ЛООА, тем самым устраняется или значительно снижается риск проскальзывания NOx из ЛООА.
Цель настоящего изобретения состоит в том, чтобы предложить способ упреждающей регенерации ловушки обедненных окисей азота, предназначенной для получения отработавших газов от двигателя автомобиля, сжигающего обедненную смесь, являющегося малозатратным при реализации и снижающим риск возникновения проскальзывания NOx.
В соответствие с первым аспектом изобретения, предложен способ упреждающей регенерации ловушки обедненных NOx, предназначенной для получения отработавших газов от двигателя автомобиля, сжигающего обедненную смесь, при этом способ содержит использование прогноза будущей работы автомобиля для оценки вероятности проскальзывания NOx из ловушки обедненных NOx в течение текущего ездового цикла, и если ожидают возникновение проскальзывания NOx в текущем ездовом цикле, используют прогноз будущей работы автомобиля для предположения того, существуют ли предстоящие возможности осуществления регенерации ловушки обедненных NOx благоприятным образом до прогнозированного возникновения проскальзывания, и если такие благоприятные возможности существуют, планируют регенерацию ловушки обедненных NOx при следующей благоприятной возможности.
Вероятность возникновения проскальзывания NOx может зависеть от текущего уровня накопленных NOx в ЛООА и по меньшей мере одного рабочего параметра двигателя.
Вероятность возникновения проскальзывания NOx может зависеть от по меньшей мере двух рабочих параметров двигателя.
Один из рабочих параметров двигателя может представлять собой ожидаемое падение воздушно-топливного отношения.
Один из рабочих параметров двигателя может представлять собой ожидаемое увеличение температуры отработавших газов.
Один из рабочих параметров двигателя может представлять собой ожидаемое значительное изменение массового расхода отработавших газов, текущих к ловушке обедненных NOx.
Выполнение благоприятным образом регенерации ловушки обедненных NOx может быть запланировано, когда прогноз показывает, что ожидается работа двигателя с низким воздушно-топливным отношением.
Работу двигателя с низким воздушно-топливным отношением могут ожидать, когда нагрузка на двигатель высокая.
Работу двигателя с низким воздушно-топливным отношением могут ожидать, когда нагрузка на двигатель высокая, и когда частота вращения двигателя низкая.
Прогноз будущей работы автомобиля получают при использовании способа прогнозирования стандартного маршрута.
Способ прогнозирования стандартного маршрута может содержать этапы, на которых сравнивают текущую схему работы с хранимыми стандартными схемами работы, используют одну конкретную из хранимых стандартных схем работы для прогнозирования будущей работы автомобиля при текущей поездке.
Способ прогнозирования стандартного маршрута может также содержать проводимый пользователем контроль работы автомобиля для каждой поездки, сохранение данных, собранных на основе контроля и установление стандартных схем работы на основе сохраненных данных.
В соответствии со вторым аспектом настоящего изобретения, предлагается автомобиль, содержащий двигатель, выполненный с возможностью сжигания обедненной смеси, ловушку обедненных NOx, предназначенной для получения отработавших газов двигателя, и электронную систему обработки данных для управления регенерацией ловушки обедненных NOx, при этом электронная система обработки данных выполнена с возможностью использования прогноза будущей работы автомобиля для оценки вероятности проскальзывания NOx из ловушки обедненных NOx в течение текущего ездового цикла и, при ожидании возникновения проскальзывания NOx в текущем ездовом цикле, использования прогноза будущей работы автомобиля для предположения того, существуют ли предстоящие возможности осуществления регенерации ловушки обедненных NOx благоприятным образом до прогнозированного возникновения проскальзывания, и, в случае существования таких благоприятных возможностей, планирования регенерации ловушки обедненных NOx при следующей благоприятной возможности.
Электронная система обработки данных может быть также выполнена с возможностью осуществления прогнозирования будущей работы автомобиля.
Может быть возможность получения прогноза будущей работы автомобиля при использовании способа прогнозирования стандартного маршрута.
Способ прогнозирования стандартного маршрута может быть выполнен с использованием электронной системы обработки данных и может содержать этапы, на которых сравнивают текущую схему работы с хранимыми стандартными схемами работы и, если текущая схема работы соответствует одной конкретной из хранимых стандартных схем работы, используют одну конкретную из хранимых стандартных схем работы для прогнозирования будущей работы автомобиля при текущей поездке.
Способ прогнозирования стандартного маршрута может также содержать проводимый пользователем контроль работы автомобиля для каждой поездки, сохранение данных, собранных на основе контроля и составление стандартных схем работы на основе сохраненных данных.
Краткое описание чертежей
Изобретение будет раскрыто посредством примеров со ссылкой на прилагаемые чертежи, на которых изображено нижеследующее:
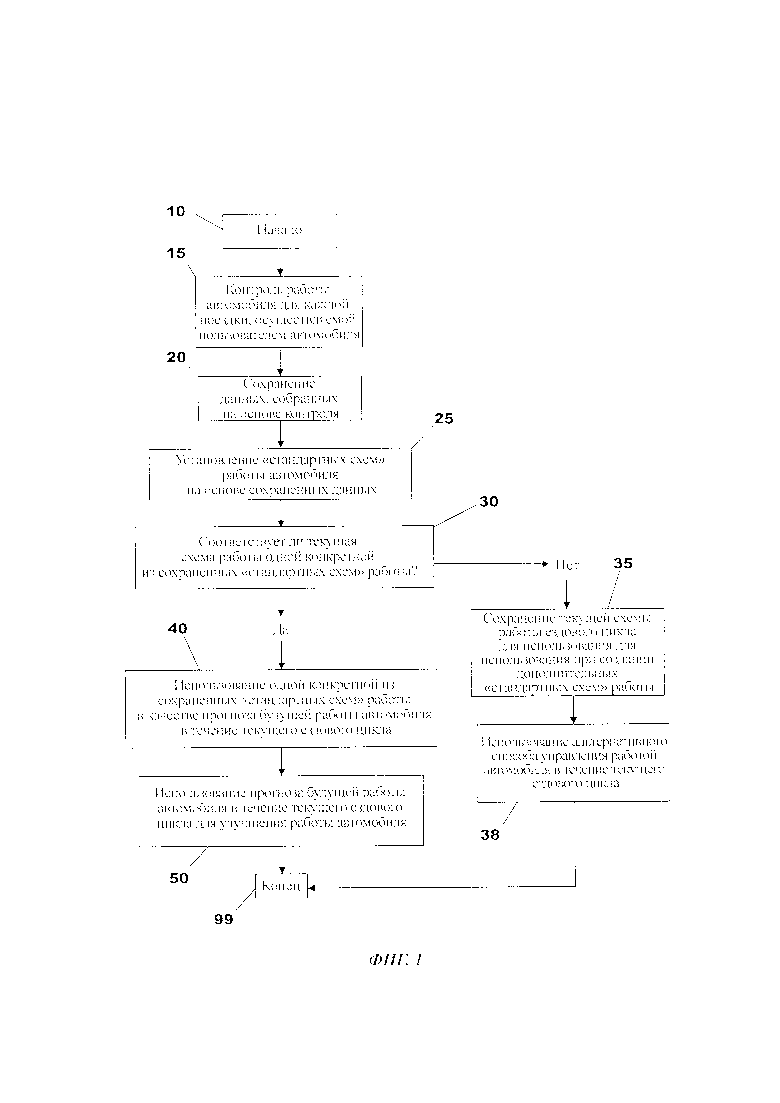
на фиг. 1 представлена высокоуровневая блок-схема способа прогнозирования будущего характера эксплуатации автомобиля;
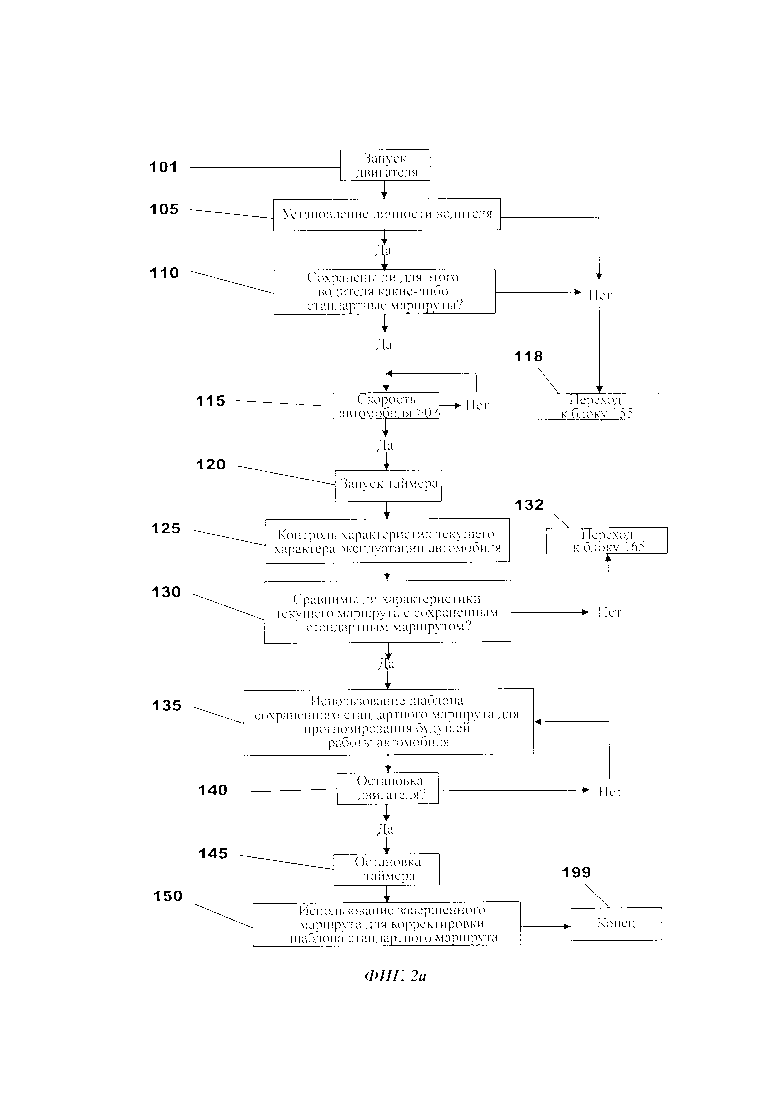
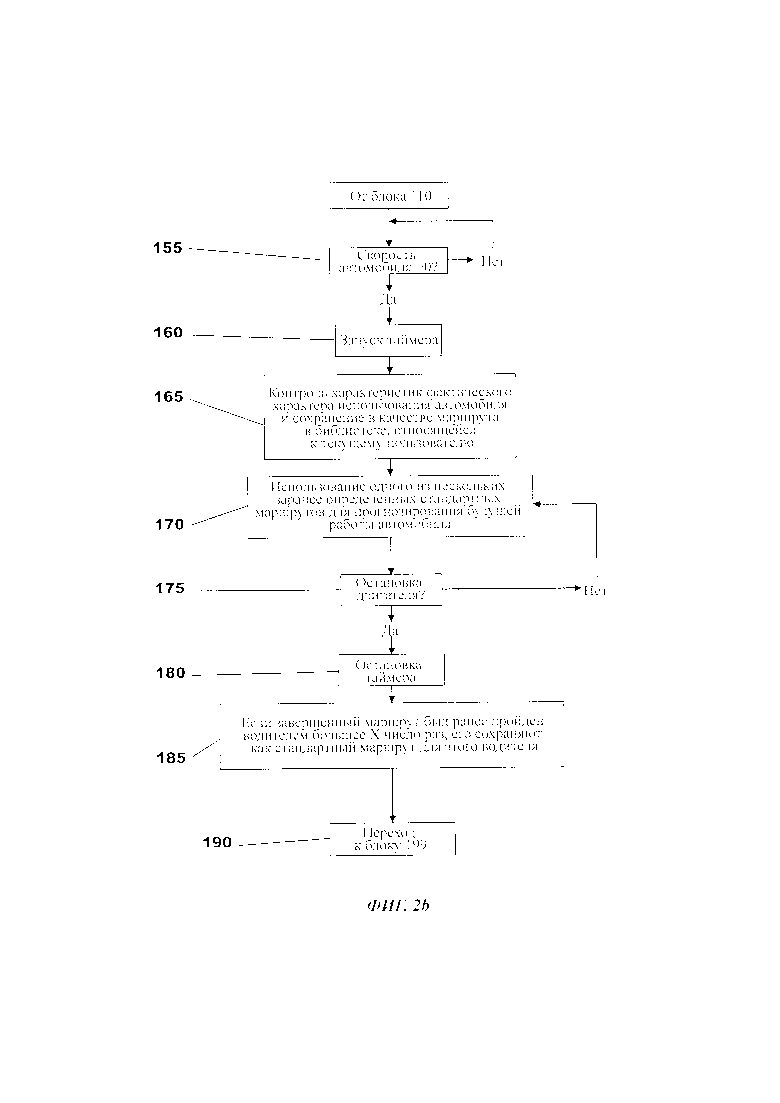
на фиг. 2а и 2б показана блок-схема одного примера использования способа прогнозирования будущего характера эксплуатации автомобиля, применительно к автомобилю, имеющему нескольких пользователей;
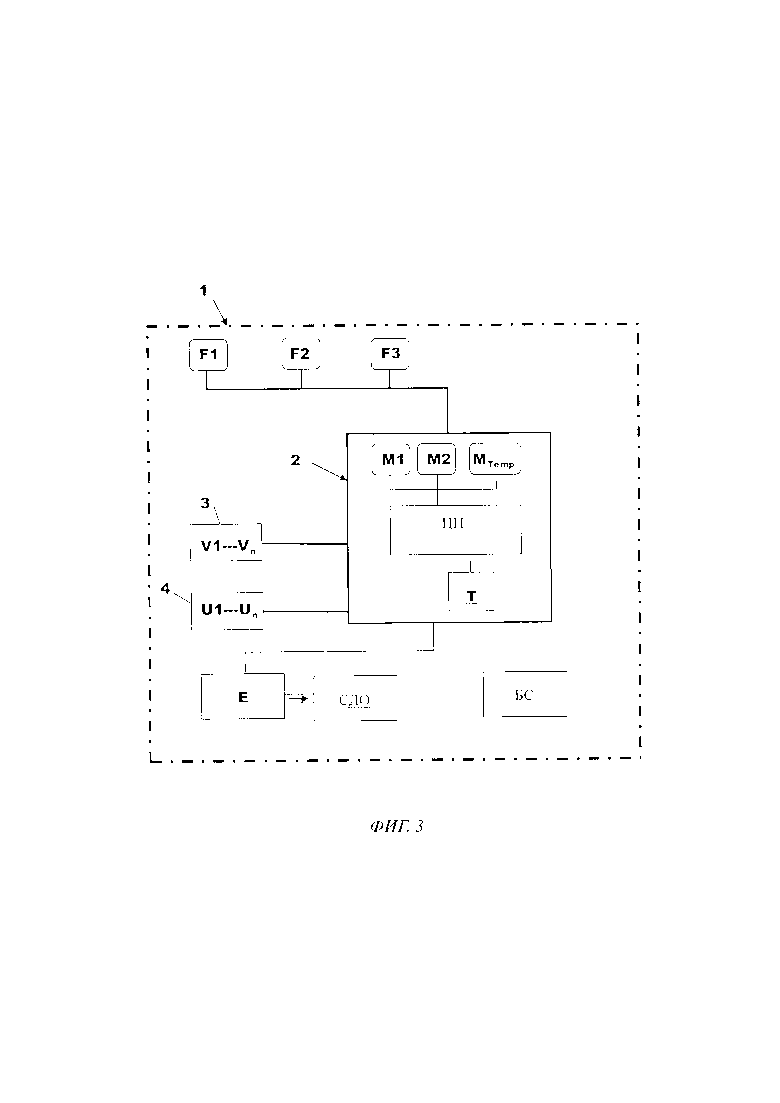
на фиг. 3 представлена функциональная схема автомобиля, содержащего систему для прогнозирования будущей работы автомобиля в соответствие со вторым аспектом настоящего изобретения; и
на фиг. 4 представлена блок-схема способа упреждающей регенерации ловушки обедненных NOx в соответствии с первым аспектом настоящего изобретения.
Осуществление изобретения
На фиг. 1 показан конкретный пример способа прогнозирования будущей работы автомобиля, такого как автомобиль 1, показанный на фиг. 3.
Способ начинается в блоке 10 и затем переходит к блоку 15, который содержит автомобиля контроль работы автомобиля для каждой поездки, осуществляемой пользователем. Различные контролируемые параметры пригодны как для выявления конкретного маршрута, по которому следуют, так и для определения более позднего момента в текущей поездке, в которой может быть произведена оптимизация работы автомобиля.
В настоящем контексте поездка означает один ездовой цикл. Ездовой цикл может включать в себя период времени, начинающийся с запуска двигателя поворотом ключа зажигания и заканчивающийся остановкой автомобиля с последующим выключением двигателя поворотом ключа зажигания.
Контролируемые параметры могут классифицироваться на:
а) параметры автомобиля, например и без ограничения идеи изобретения, такие как частота вращения двигателя, крутящий момент двигателя, передаточное отношение; и
б) параметры управляющего воздействия пользователя, такие как положение педали акселератора, скорость изменения положения педали акселератора, положение педали тормоза, положение рычага переключения передач, угловое положение руля, скорость изменения положения руля.
Такие параметры соответствуют каждой характеристике хронологии поездки, например, времени, прошедшему с момента запуска двигателя, времени, прошедшему с обнаружения начального перемещения автомобиля после запуска двигателя, или изменению пройденного расстояния, например, расстояния, пройденного автомобилем после запуска.
От блока 15 способ переходит к блоку 20, на котором информацию, собранную на основе контроля, сохраняют в памяти. Следует понимать, что информацию сохраняют в реальном времени и, таким образом, действия, указанные в блоках 15 и 20 совершаются одновременно. Следует понимать, что информация, собранная посредством контроля, может быть сохранена в качестве непрерывной записи параметра в течение всего ездового цикла или может быть сохранена в качестве моментальных значений параметра, сохраняемого при возникновении заданного события запуска/остановки двигателя поворотом ключа зажигания. В качестве примера и без ограничения идеи изобретения, при любом переключении передачи, все параметры могут быть записаны для заданного периода времени после переключения передачи.
Способ переходит от блока 20 к блоку 25, где устанавливают «стандартные схемы» работы автомобиля. Многие водители используют несколько маршрутов, которыми они чаще всего следуют, и эти маршруты в настоящем контексте именуются «стандартные маршруты». В качестве примера и без ограничения идеи изобретения, это может быть маршрут из дома на работу, маршрут с работы домой, маршрут из дома в супермаркет, маршрут из дома в школу, маршрут из дома в спортивный клуб, например, тренажерный зал, бассейн, гольф-клуб, футбольный клуб, и многие другие постоянно используемые маршруты.
При следовании по такому стандартному маршруту каждый раз автомобиль будет работать одинаковым образом, и характеристики работы автомобиля таким образом могут записываться и обрабатываться для прогнозирования будущей работы автомобиля.
В качестве примера и без ограничения идеи изобретения, когда на маршруте в ходе работы автомобиль должен преодолевать перекрестки с круговым движением (кольцевое пересечение дорог), после приблизительно двух минут от начального отправления из состояния покоя с последующим ускорением по автомагистрали, результирующая комбинация параметра автомобиля и параметра пользователя используется для идентификации маршрута, по которому в настоящий момент следует автомобиль.
Таким образом, путем анализирования сохраненных данных, полученных на основе предыдущих поездок, можно составить библиотеку стандартных маршрутов. В качестве примера и без ограничения идеи изобретения, если характеристические рабочие особенности маршрута возникают чаще, чем заданное количество раз в пределах заданного периода времени, маршрут может быть классифицирован как стандартный маршрут. Например, если ранее учтенная комбинация параметра автомобиля и параметра управляющего воздействия водителя возникает пять раз в течение четырех недельного периода или пять раз в течение 20 ездовых циклов, то эта конкретная схема параметров сохраняется как стандартный маршрут. В противном случае, ее сохраняют для будущего учета, т.к. она может стать стандартным маршрутом при последующих ездовых циклах.
В качестве альтернативы, когда по маршруту проезжают по меньшей мере единожды, он добавляется в библиотеку стандартных маршрутов, которую сохраняют исходя из частоты их использования, при этом маршруты, не повторяющиеся в течение заданного периода времени, удаляют.
От блока 25 способ переходит к блоку 30, где маршрут, по которому едут в данный момент, сравнивают со стандартными маршрутами, хранимыми в библиотеке, и, если одна или более характеристическая комбинация параметров, возникающих на текущем ездовом цикле, будет найдена в одном из стандартных маршрутов, то предполагают, что автомобиль следует этим конкретным стандартным маршрутом, и способ переходит к блоку 40, в котором хранимый стандартный маршрут используют для прогнозирования будущей работы автомобиля. Например, если после одной минуты с начального трогания с места вслед за запуском двигателя или через 0,5 км от начала движения в текущей поездке будет установлено, что автомобиль следует по одному конкретному из сохраненных стандартных маршрутов в блоке 30, то в блоке 40 будущая работы автомобиля в оставшейся части маршрута может быть спрогнозирована.
Эта информация может затем быть использована в блоке 50 для улучшения работы автомобиля на оставшуюся часть текущего ездового цикла или на короткий заданный период времени после текущего момента времени, в зависимости от необходимости улучшения работы автомобиля.
Следует понимать, что, если автомобиль 1 отклоняется от стандартного маршрута, использование прогноза будущей работы, осуществляемого в блоке 50, не возможно, и, таким образом, регенерацией нужно управлять каким-либо другим способом. В таком случае способ может перескочить с блока 50 на блок 38.
Однако обычно способ переходит с блока 50 к блоку 99, на котором он заканчивается при остановке двигателя поворотом ключа зажигания.
В блоке 30, если текущая схема работы не соответствует одному из сохраненных стандартных маршрутов, то способ переходит к блоку 35, где сохраняют рабочие характеристики текущего маршрута. Следует понимать, что стандартные маршруты можно определить только посредством использования автомобиля и что если автомобиль новый, стандартные маршруты будут отсутствовать, а если автомобиль переходит к новому владельцу, стандартные маршруты уже не применимы. Следовательно, в течение периода определения стандартных маршрутов и в течение всего срока использования автомобиля каждый маршрут сохраняется и анализируется для понимания того, можно ли его определить как стандартный маршрут.
От блока 35 способ переходит к блоку 38, где должен быть использован альтернативный способ для управления автомобилем в течение текущего ездового цикла, т.к. нет имеющегося прогноза будущей работы автомобиля, не смотря на то, что могут быть использованы ожидаемые маршруты, определяемые исходя из стандартных данных. Однако автомобиль должен работать без преимущества актуального прогнозирования будущей работы автомобиля для текущей поездки.
Как и ранее, способ заканчивается на блоке 99, когда происходит остановка двигателя поворотом ключа зажигания.
Следует понимать, что параметры, используемые для идентификации того, следует ли автомобиль стандартным маршрутом и, следовательно, параметры, используемые для определения характеристик стандартного маршрута не обязательно совпадают с параметрами, знание о которых необходимо для улучшения конкретной функции автомобиля. Например, сравнение положения руля в зависимости от времени или от пройденного расстояния и передаточного отношения в зависимости от времени или от пройденного расстояния может быть использовано для установления корреляции между текущим маршрутом и одним из сохраненных стандартных маршрутов, но информация, требуемая в будущем, может представлять собой скорость автомобиля и положение педали акселератора, которые также сохраняются, но не используются для установления того, является ли текущий маршрут стандартным маршрутом. В качестве примера и без ограничения идеи изобретения, путем использования положения руля и передаточного отношения, можно установить, что автомобиль в текущий момент движется по стандартному маршруту и определить местонахождение автомобиля на этом стандартном маршруте. Используя эту информацию, могут быть проанализированы скорость автомобиля и положение педали акселератора для прогноза будущей работы автомобиля в текущей поездке, а также для определения момента времени или расстояния от начала поездки, при котором ожидается замедление автомобиля на значительный промежуток времени с отпущенной педалью акселератора, для использования в планировании заряда аккумуляторной батареи автомобиля путем преобразования кинетической энергии автомобиля в электрическую энергию.
Способ, использующий сохраненные стандартные маршруты для прогнозирования будущей работы автомобиля, в настоящем документе называется способом прогнозирования стандартного маршрута (СПСМ).
На фиг. 2а и 2б показан один конкретный вариант осуществления применения СПСМ применительно к автомобилю 1, показанному на фиг. 3.
Автомобиль 1 содержит двигатель Е, систему дополнительной обработки отработавших газов (СДО) для двигателя Е, батарейную систему (БС), электронную систему обработки данных (ЭСОД) 2, контрольное устройство 3 автомобиля для обеспечения информации ЭСОД 2 касательно нескольких параметров (V1-Vn), в качестве примера и без ограничения идеи изобретения таких, как частота вращения двигателя, скорость движения автомобиля, крутящий момент двигателя, передаточное отношение, и контрольное устройство 4 пользователя для обеспечения информации ЭСОД 2 касательно нескольких параметров (U1-Un) пользователя, в качестве примера и без ограничения идеи изобретения таких, как положение педали акселератора, скорость изменения положения педали акселератора, положение педали тормоза, положение рычага переключения передач, угловое положение руля и скорость изменения положения руля.
Контрольное устройство 3 автомобиля и контрольное устройство 4 пользователя используют входные сигналы от датчиков, обычно всегда присутствующих в современном автомобиле для эффективной работы двигателя Е автомобиля 1, снижения токсичности выбросов отработавших газов от двигателя Е автомобиля 1 или автоматических остановки и запуска двигателя Е автомобиля 1. В качестве примера и без ограничения идеи изобретения, в случае параметров автомобиля, они могут контролироваться при использовании датчика частоты вращения двигателя, датчика скорости движения автомобиля, датчика, указывающего запрошенный крутящий момент, датчика массового расхода воздуха и других подобных датчиков, используемых для обеспечения сигналов, указывающих динамическое состояние автомобиля или функциональных частей автомобиля, таких как двигателя, коробки передач. В случае параметров пользователя, они могут контролироваться при использовании датчика положения педали акселератора, датчика положения педали тормоза датчика положения педали сцепления, датчика положения рычага переключения передач, датчика углового положения руля и других подобных датчиков, используемых для обеспечения сигналов, указывающих входные воздействия водителя.
Следует понимать, что фактические используемые датчики будут зависеть от конкретной используемой конструкции автомобиля и что не обязательно использовать все вышеперечисленные датчики. Кроме того, в некоторых вариантах осуществления могут быть использованы дополнительно или альтернативно другие датчики, не перечисленные здесь.
ЭСОД 2 содержит несколько запоминающих устройств «М1», «М2», «MTemp», центральный процессор «ЦП» и таймер «Т». Следует понимать, что ЭСОД 2 показана схематически и не отображает фактическую электронную систему обработки данных.
Запоминающее устройство М1 используется для хранения схем работы автомобиля для стандартных маршрутов, относящихся к первому водителю, а запоминающее устройство М2 используется для хранения схем работы автомобиля для стандартных маршрутов, относящихся ко второму водителю.
Запоминающее устройство MTemp используется для хранения информации в течение текущего ездового цикла, а также схем работы из предыдущих ездовых циклов, которые еще не были классифицированы как стандартные маршруты. Запоминающее устройство MTemp периодически опустошают или очищают от хранимой информации. В качестве примера и без ограничения идеи изобретения, если маршрут не повторялся в пределах заданного промежутка времени или заданного количества ездовых циклов, то предполагают, что маловероятно то, что он станет стандартным маршрутом, и таким образом, его не нужно сохранять, поэтому его удаляют.
ЭСОД 2 предназначена для улучшения одной или более рабочих характеристик автомобиля 1, и, хотя показаны три характеристики F1, F2 и F3, следует понимать, что может быть больше или меньше улучшаемых рабочих характеристик.
В настоящем примере функция F1 - это заряд аккумуляторной батареи, составляющей часть батарейной системы БС, F2 - это подача восстановителя в устройство дополнительной обработки отработавших газов, составляющее часть системы дополнительной обработки отработавших газов (СДО), и F3 - это управление двигателем Е таким образом, чтобы обеспечить регенерацию устройства дополнительной обработки отработавших газов, составляющего часть СДО. Общее свойство всех этих функций состоит в том, что предпочтительно знать, какой будет будущий характер эксплуатации автомобиля 1 в текущем ездовом цикле, чтобы обеспечить выполнение или осуществление этих функций более эффективно или с меньшим негативным воздействием на окружающую среду.
На фиг. 2а способ начинается в блоке 101 с запуска двигателя и переходит к блоку 105. В этом случае личность пользователя автомобиля 1 устанавливается посредством кода, записанного в брелок (не показан), используемый для открытия автомобиля 1, и, таким образом, личность пользователя автомобиля 1 становится известна сразу после открытия автомобиля 1. Однако не всегда необходимо открывать автомобиль, и личность пользователя может быть установлена на основе того, какие варианты действий выполняет пользователь или каким образом пользователь устанавливает используемые характеристики автомобиля. В качестве примера и без ограничения идеи изобретения, для установления того, является ли действующий водитель известным пользователем автомобиля 1, можно использовать положение сидения водителя, вес водителя, расположение одного или более зеркал, выбор конкретной радиостанции, манера ускорения или замедления автомобиля, например, агрессивная или постепенная.
Установление личности пользователя автомобиля 1 полезно, т.к. различные пользователи, скорее всего, используют различные стандартные маршруты, а также т.к. два водителя, едущие одинаковым маршрутом, скорее всего, по-разному управляют рабочими характеристиками автомобиля, и, таким образом, при известности личности пользователя легче выявить корреляцию между текущим проезжаемым маршрутом и сохраненным стандартным маршрутом. Следует понимать, что если фактический характер эксплуатации автомобиля используется для идентификации пользователя, то блок 105 должен быть расположен позже в последовательности событий, т.к. для установления личности пользователя может быть необходимо движение автомобиля 1.
Если в блоке 105 личность пользователя не может быть установлена, то способ переходит к блоку 118 и далее к блоку 155, затем способ переходит к блоку 110, где проверяют, существуют ли для текущего пользователя какие-либо стандартные маршруты. Если стандартные маршруты существуют в соответствующей памяти М1, М2, то способ переходит к блоку 115, но, если не существуют, то способ переходит к блоку 118 и от него к блоку 155, описание которого будет дано ниже.
В блоке 115 проверяют, движется ли автомобиль 1 вперед, а если нет, то способ возвращается обратно для повторной проверки скорости автомобиля 1 в блоке 115, а если автомобиль 1 движется вперед, то способ переходит от блока 115 к блоку 120, где производят запуск таймера, такого как таймер Т. Запуск таймера Т является началом ездового цикла, который продолжается до остановки таймера Т в блоке 145. В других вариантах осуществления начальный и конечный моменты ездового цикла определяются событиями запуска и остановки двигателя соответственно, а расстояние, пройденное автомобилем с события запуска двигателя, используется как опорная шкала.
От блока 120 способ переходит к блоку 125, где при использовании автомобиля 1 контролируют его характеристические параметры. В действительности контроль различных характеристических параметров, требующих построения стандартного маршрута или определения того, движется ли автомобиль 1 по стандартному маршруту, начнется как только запустят таймер Т.
Произведя контроль различных параметров и сохранив их во временной памяти в блоке 125, MTemp способ переходит к блоку 130 для определения того, соответствует ли маршрут, проезжаемый в данный момент, одному из сохраненных стандартных маршрутов для текущего пользователя. На этом этапе сравнивают различные характеристические параметры с теми же параметрами, сохраненными как часть стандартного маршрута для того же прошедшего времени или для того же пройденного расстояния. Например, сравнение параметров автомобиля, таких как частота вращения двигателя, скорость движения автомобиля и выходной крутящий момент двигателя или запрошенный крутящий момент двигателя в функции времени могут быть сравнены для определения того, присутствуют ли в текущем маршруте те же схемы, которые соответствуют схемам одного из сохраненных стандартных маршрутов для текущего пользователя.
Следует понимать, что нужно учитывать диапазоны допустимых отклонений данных параметров для допущения небольших отклонений текущих значений и значений, сохраняемых в виде характеристик стандартного маршрута.
Альтернативно или дополнительно, кроме параметров автомобиля, могут сравнивать и параметры пользователя. Например, могут быть сравнены значения углового положения руля и положения педали акселератора в функции времени или положения рычага переключения передач и положения педали сцепления или тормоза в функции времени.
При использовании комбинации параметров автомобиля и параметров пользователя повышается вероятность того, что положительный результат сравнения будет корректным.
Если в блоке 130 результат сравнения показывает, что текущий маршрут не сравним ни с одним из сохраненных в настоящее время стандартных маршрутов, то способ переходит к блоку 132 и далее к блоку 165, описание которых будет дано ниже.
Однако, если найден сравнимый стандартный маршрут в памяти М1 или М2, в зависимости от текущего пользователя автомобиля 1, то способ переходит к блоку 135, где предполагают, что стандартный маршрут является точным прогнозом будущей работы автомобиля 1 в текущем ездовом цикле.
Другими словами, значения будущие параметров автомобиля и параметров пользователя могут быть спрогнозированы исходя из значений, сохраненных как часть стандартного маршрута, и могут быть использованы в способах принятия решений, используемых для оптимизации или улучшения работы функций F1-F3, которые в настоящем примере находятся под влиянием выходного сигнала от ЭСОД 2.
Следует понимать, что если автомобиль 1 отклоняется от стандартного маршрута, прогнозирование будущей работы, осуществляемое в блоке 135 не возможно, и, таким образом, управление регенерацией нужно осуществлять каким-либо другим способом. В этом случае способ может перескочить или перейти от блока 135 к блоку 170.
Однако обычно способ затем переходит от блока 135 к блоку 140 для проверки того, произошло ли событие запуска двигателя, и если нет, то способ возвращается к блоку 135 для продолжения использования стандартного маршрута для прогнозирования будущих событий, и этот процесс будет продолжен до достижения автомобилем 1 конечного пункта назначения в текущем ездовом цикле и остановки двигателя. Следовательно, события, происходящие незадолго до конца ездового цикла, будь то события, связанные с параметрами пользователя, или события, связанные с параметрами автомобиля, могут быть спрогнозированы, как только будет подтверждено в блоке 130, что текущий маршрут является сравнимым с одним из сохраненных стандартных маршрутов.
В конце ездового цикла, на который указывает событие остановки двигателя, способ переходит от блока 140 к блоку 145, и таймер Т останавливается. Все данные только что завершившегося маршрута затем используются для корректировки шаблона стандартного маршрута, другими словами, любые небольшие отклонения в фактически произошедших событиях сравниваемые с прогнозированными, используются для корректировки шаблона стандартного маршрута путем, например, изменения допустимых пределов для получения положительного результата сравнения или путем корректировки прогнозируемых значений, сохраненных в шаблоне стандартного маршрута, основываясь на недавно созданной записи.
Затем способ завершается в блоке 199.
Вернемся к блоку 118, от которого способ переходит к блоку 155, причем этот переход происходит или из-за того, что личность водителя не возможно установить, или из-за того, что для текущего водителя нет сохраненных стандартных маршрутов.
В блоке 155 проверяют, движется ли автомобиль 1 вперед, и если нет, то способ возвращается обратно для повторной проверки скорости автомобиля 1 в блоке 155, а если автомобиль 1 движется вперед, то способ переходит от блока 155 к блоку 160, где производят запуск таймера, такого как таймер Т. Запуск таймера Т является началом ездового цикла, который продолжается до остановки таймера Т в блоке 180.
От блока 160 способ переходит к блоку 165, где контролируют характеристические параметры автомобиля при их использовании и сохраняют их, например, во временной памяти MTemp. Фактически контроль различных характеристических параметров, требуемых для построения стандартного маршрута, начинается как только производится запуск таймера Т. Этот этап используют для начала построения библиотеки стандартных маршрутов для текущего пользователя, если пользователь известен, или для возможного использования в будущем, если пользователь, не идентифицированный в настоящее время, регулярно использует автомобиль. К блоку 165 также переходят от блока 130, если определено, что текущий маршрут автомобиля 1 не сравним ни с одним из сохраненных стандартных маршрутов.
От блока 165 способ переходит к блоку 170, где в этом случае один из нескольких сохраненных стандартных маршрутов используется для прогнозирования краткосрочной будущей работы автомобиля 1. Стандартные маршруты определяют ожидаемую работу автомобиля, когда он работает по заданным сценариям, например, в городском движении, уличном движении, на автомагистрали. Путем проведения обширного поиска, могут быть созданы такие стандартные маршруты, которые позволяют использовать краткосрочное прогнозирование будущих событий для содействия в улучшении работы функций F1-F3, связанных с ЭСОД 2.
От блока 170 способ переходит к блоку 175, в котором производят проверку возникновения события остановки двигателя. Если событие остановки двигателя не произошло, то способ возвращается к блоку 170.
Поэтому в случае использования стандартных маршрутов может быть обеспечено краткосрочное прогнозирование будущей работы автомобиля, пока текущий ездовой цикл продолжается, как показано стрелкой, возвращающейся от блока 175 к блоку 170.
Когда происходит событие отключения двигателя, способ переходит от блока 175 к блоку 180, где останавливают таймер Т, и затем переходит к блоку 185, где только что завершившийся маршрут анализируют для определения того, возникал ли ранее сравниваемый маршрут чаще, чем заданное количество (X) раз. Если тот же маршрут был пройден большее, чем X, количество раз, то его сохраняют в одно из запоминающих устройств М1, М2 как стандартный маршрут для текущего водителя, если личность водителя известна, или сохраняют во временной памяти MTemp, с целью будущего сравнения.
После блока 185 способ переходит через блок 190 к блоку 199, где он заканчивается.
Таким образом, подводя итог, настоящее изобретение предлагает использование характеристических параметров автомобиля и/или параметров пользователя для создания нескольких стандартных маршрутов, которые можно использовать для прогнозирования будущей работы автомобиля, когда подтверждают, что маршрут, по которому следуют в настоящий момент, является сравнимым с одним из стандартных маршрутов.
Способ может также включать в себя запоминание места последней остановки автомобиля и использовать эти данные для ускорения опознавания нахождения автомобиля на стандартном маршруте. Например, если последней остановкой автомобиля был супермаркет, то вероятнее всего, следующий маршрут будет от супермаркета до дома, и, таким образом, этот стандартный маршрут может быть проверен первым.
Аналогично, если последний маршрут был от работы до дома, то следующий маршрут, вероятнее, будет от дома обратно на работу, и, таким образом, он может быть проверен первым.
Одно из преимуществ использования такого способа прогнозирования состоит в том, что будущая работа автомобиля может быть спрогнозирована автоматически без воздействия на пользователя автомобиля. Другое преимущество использования СПСМ заключается в том, что контроль параметров автомобиля и параметров пользователя может быть произведен с использованием датчиков, которые, как правило, всегда присутствуют в автомобиле для других целей, и, таким образом, настоящее изобретение может быть реализовано во многих случаях с незначительными дополнительными затратами. Другое преимущество состоит в том, что СПСМ может быть применен в автомобиле, не оборудованном навигационной системой или в странах, в которых нет детальной цифровой карты дорог.
Еще одно преимущество использования СПСМ состоит в том, что как только будет установлено, что автомобиль движется по стандартному маршруту, может быть спрогнозирована работа автомобиля на оставшуюся часть этого маршрута.
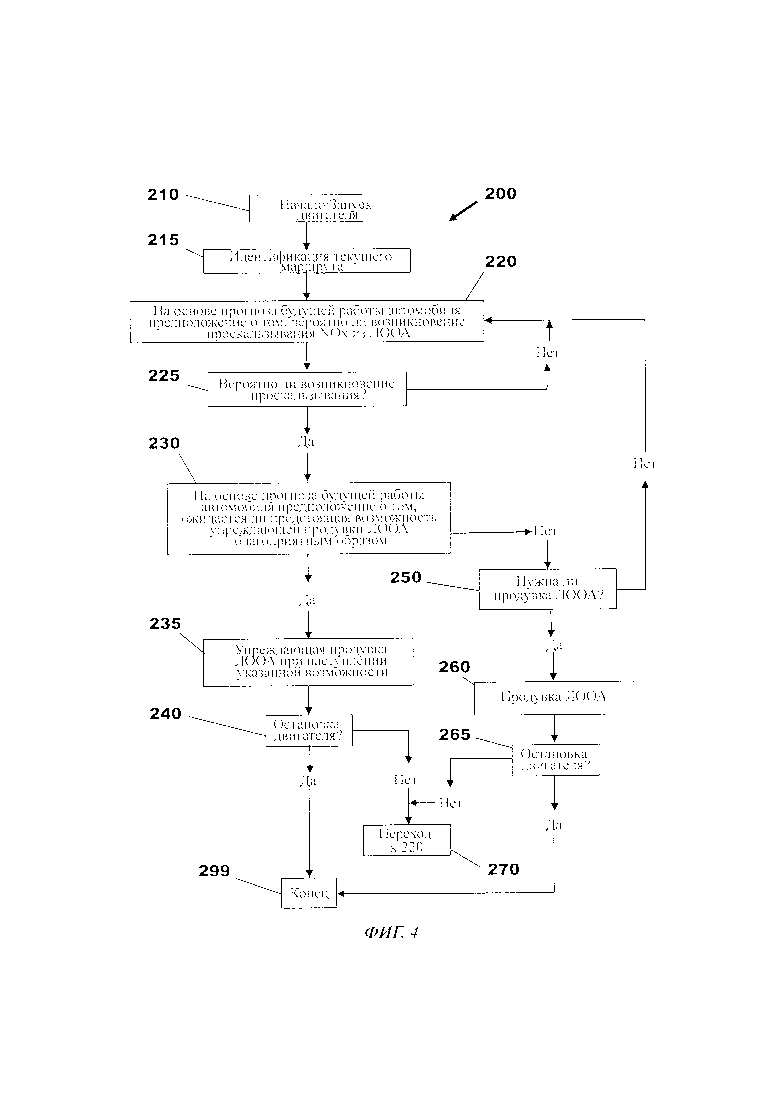
В частности, на фиг. 4 показан способ упреждающей регенерации ловушки обедненных NOx, предназначенной для получения отработавших газов от двигателя, сжигающего обедненную смесь, в соответствии с настоящим изобретением.
Способ 200 начинается в блоке 210, где осуществляют запуск двигателя автомобиля, такого как автомобиль 1, содержащий двигатель Е, выполненный с возможностью работы в режимах сжигания обогащенной смеси и обедненной смеси, к которому подсоединена ловушка обедненных NOx, образующая часть системы дополнительной обработки (СДО) двигателя Е, таким образом, чтобы получать от него отработавшие газы.
С этапа 210 способ переходит к блоку 215, где идентифицируют маршрут, по которому в настоящий момент движется автомобиль 1. Эта идентификация может быть осуществлена соответствующими средствами, но предпочтительно с использованием методики, являющейся частью способа прогнозирования стандартного маршрута (СПСМ), например, СПСМ, раскрытого выше со ссылкой на фиг 1-2б.
От блока 215 способ переходит к блоку 220, где прогнозирование будущей работы автомобиля 1 и, в частности, будущей работы двигателя Е используется для предположения или прогнозирования того, вероятно ли проскальзывание NOx из ЛООА. Это прогнозирование может быть осуществлено с использованием любой соответствующей методики, но предпочтительно с использованием СПСМ, например, СПСМ, раскрытого выше со ссылкой на фиг 1-2б.
Возникновение проскальзывания NOx из ЛООА более вероятно, если ЛООА заполнена NOx и когда:
i) существует падение воздушно-топливного отношения (лямбда, λ); или
ii) существует повышение температуры отработавших газов; или
iii) существует значительное изменение массового расхода отработавших газов.
В блоке 220 производят оценку текущего уровня NOx, захваченных в ЛООА, в качестве примера и без ограничения идеи изобретения, посредством моделирования NOx, накопленных в ЛООА с момента последней регенерации. Эта оценка затем используется для определения того, вероятно ли возникновение проскальзывания. Следует понимать, что по мере возрастания уровня накопленных в ЛООА NOx, повышается вероятность проскальзывания NOx и что изменения параметров i-iii, необходимых для возникновения проскальзывания, снижаются.
Таким образом, в блоке 220 на основании прогноза будущей работы автомобиля 1 проверяют, достаточно ли велик уровень захваченных NOx в ЛООА для возможности возникновения проскальзывания, и также прогнозируется ли возникновение по меньшей мере одного из рабочих параметров двигателя i-iii с достаточной величиной в течение текущего ездового цикла.
Способ затем переходит к блоку 225, где проверяют, вероятно ли возникновение проскальзывания NOx из ЛООА, исходя из текущего уровня NOx в ЛООА и по меньшей мере одного из параметров i-iii. Другими словами, вероятность возникновения проскальзывания выше заданного уровня, например, 60%.
Если при проверке в блоке 225 ожидают возникновения проскальзывания NOx из ЛООА, то способ переходит от блока 225 к блоку 230, в противном случае возвращается к блоку 220.
В блоке 230 на основании прогноза будущей работы автомобиля 1 проверяют, ожидается ли в ближайшем будущем наступление возможности осуществления регенерации ЛООА благоприятным образом. Следует понимать, что эта возможность регенерации должна присутствовать до ожидаемого возникновения проскальзывания NOx из ЛООА.
Как и ранее, при этом прогнозировании могут использовать любые соответствующие методики, но предпочтительно использовать СПСМ.
В случае настоящего примера регенерация ЛООА представляет собой продувку NOx из ЛООА для предотвращения проскальзывания NOx. В случае продувки ЛООА отработавшие газы должны быть обогащены относительно стехиометрического уровня и предпочтительно с воздушно-топливным отношением лямбда (λ), меньшим единицы (λ<1). Это условие также требуется для подачи СО в целях восстановления и выпуска накопленных NOx.
Для осуществления этого наиболее благоприятным образом, то есть, при наименьшем расходе топлива, лучше всего выполнять продувку, когда воздушно-топливное отношение уже низкое. Низкое воздушно-топливное отношение возникает, когда нагрузка на двигатель высока, и, таким образом, крутящий момент двигателя Е высокий. Предпочтительно также, чтобы при выполнении продувки частота вращения двигателя Е выла низка, т.к. это снижает массовый расход и, следовательно, скорость отработавших газов, проходящих через ЛООА, за счет чего повышается коэффициент преобразования процесса регенерации.
Таким образом, если в блоке 230 на основании прогноза будущей работы предполагают, что есть возможность продувки ЛООА благоприятным образом, то способ переходит к блоку 235, где осуществляют продувку ЛООА при возникновении благоприятных условий. Благоприятная возможность может совпасть с риском проскальзывания, и, таким образом, продувка должна быть осуществлена в это время. Следует понимать, что продувка не обязательно удаляет все NOx, накопленные в ЛООА, потому что доступный промежуток времени в текущем окне возможности может быть меньше, чем требуется для удаления существенно всех накопленных NOx, однако продувка значительно снижает или устраняет вероятность проскальзывания NOx из ЛООА в ближайшем будущем.
После завершения продувки способ переходит от блока 235 к блоку 240 для проверки того, произошло ли событие остановки двигателя.
В блоке 240, если произошло событие остановки двигателя, то способ заканчивается, что показано блоком 299, а в противном случае, он возвращается к блоку 220, что показано блоком 270.
В блоке 230, если не предполагают наличие каких-либо возможностей продувки ЛООА благоприятным образом, способ переходит к блоку 250 для проверки того, есть ли необходимость продувки ЛООА. Следует понимать, что в блоке 220 могут быть различные вероятности возникновения проскальзывания, в зависимости от уровня NOx, в настоящий момент захваченной в ЛООА. В блоке 250, если уровень захваченных NOx выше заданного уровня или уже есть индикация того, что проскальзывание начинает возникать, то необходимо осуществить продувку ЛООА, даже если это повлечет увеличение расхода топлива больше требуемого. Однако, если вероятность возникновения проскальзывания NOx ниже, чем, например, 60%, то возможно отложить продувку и таким образом, способ возвращается к блоку 220 для повторной проверки вероятности возникновения проскальзывания NOx.
Однако, если есть неотложная потребность в продувке ЛООА (вероятность >90%), то способ переходит от блока 250 к блоку 260, и осуществляют продувку NOx из ЛООА, даже если это повлечет увеличение расхода топлива. Как и ранее, продувка может не удалить все NOx, захваченную в ЛООА, а только уменьшить ее до более приемлемого уровня для значительного уменьшения вероятности возникновения проскальзывания NOx из ЛООА в ближайшем будущем.
После завершения продувки способ переходит от блока 260 к блоку 265 для проверки того, произошло ли событие остановки двигателя.
Если событие остановки двигателя произошло при проверке в блоке 265, то способ завершается, как показано блоком 299, а в противном случае - возвращается к блоку 220, как показано блоком 270.
В частности, как показано на фиг. 3, электронная система 2 обработки данных предназначена для планирования и управления регенерацией ЛООА, образующей часть системы дополнительной обработки (СДО) для двигателя Е.
Электронная система 2 обработки данных может функционировать для использования прогноза будущей работы автомобиля 1 для оценки вероятности проскальзывания NOx из ЛООА в течение текущего ездового цикла. Если ожидается возникновение проскальзывания NOx из ЛООА в текущем ездовом цикле, электронная система 2 обработки данных может функционировать для использования прогноза будущей работы автомобиля 1 для предположения того, существуют ли приближающиеся возможности осуществления регенерации ЛООА благоприятным образом до возникновения прогнозированного проскальзывания. Если обнаружат, что такие благоприятные возможности существуют, то электронная система 2 обработки данных может функционировать для планирования регенерации ЛООА при следующей благоприятной возможности. Следует понимать, что фактическое управление продувкой может быть осуществлено посредством электронной системы 2 обработки данных или посредством одной или более других электронных систем обработки данных, с которыми взаимодействует электронная система 2 обработки данных.
Электронная система 2 обработки данных в этом случае также может функционировать для осуществления прогнозирования будущей работы автомобиля, но в других вариантах осуществления может использоваться отдельная электронная система обработки данных для осуществления прогнозирования будущей работы автомобиля и/или двигателя Е.
Предпочтительно СПСМ используют для осуществления прогнозирования будущей работы автомобиля 1 и/или двигателя Е.
Таким образом, подводя итог, предлагается путем использования прогноза будущей работы автомобиля и, в частности, работы двигателя автомобиля, оценивать то, вероятно ли возникновение проскальзывания NOx из ловушки обедненных NOx, а также существует ли возможность выполнения продувки NOx из ловушки обедненных NOx благоприятным образом до возникновения прогнозированного проскальзывания с целью снижения или устранения вероятности возникновения проскальзывания NOx.
Хотя предпочтительно использовать СПСМ для осуществления прогнозирования будущей работы автомобиля/двигателя, возможно использование других способов прогнозирования.
Специалисту в данной области техники должно быть понятно, что хотя настоящее изобретение раскрыто посредством примеров со ссылкой на один или более вариантов осуществления, оно не ограничено раскрытыми вариантами осуществления, и что могут быть созданы альтернативные варианты осуществления без отклонения от объема настоящего изобретения, определенного приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования выбросов | 2016 |
|
RU2711904C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ОЧИСТКОЙ ЛОВУШКИ ОБЕДНЕННЫХ ОКИСЛОВ АЗОТА | 2016 |
|
RU2710658C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2706632C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВЫБРОСОВ | 2016 |
|
RU2698758C2 |
| ПРОГНОЗНОЕ УПРАВЛЕНИЕ НА ОСНОВЕ АДАПТИВНОЙ МОДЕЛИ ДЛЯ ПЛАНИРОВАНИЯ МАРШРУТА АВТОМОБИЛЯ | 2015 |
|
RU2701620C2 |
| СПОСОБ ДЛЯ ПРОГРЕВА ВЫПУСКНОЙ СИСТЕМЫ | 2016 |
|
RU2682688C2 |
| СПОСОБ И ЭЛЕКТРОННАЯ СИСТЕМА ПЛАНИРОВАНИЯ РЕГЕНЕРАЦИИ ЛОВУШКИ ОБЕДНЕННЫХ ОКСИДОВ АЗОТА | 2015 |
|
RU2708173C2 |
| СПОСОБ ТЕСТИРОВАНИЯ НА УТЕЧКУ ТОПЛИВНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СПОСОБ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2675771C2 |
| СИСТЕМА И СПОСОБ (ВАРИАНТЫ) ДЛЯ АДАПТИВНОЙ РЕГЕНЕРАЦИИ САЖЕВЫХ ФИЛЬТРОВ В ДИЗЕЛЬНЫХ ДВИГАТЕЛЯХ | 2015 |
|
RU2716098C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ВЫБОРА ОКТАНОВОГО ЧИСЛА ТОПЛИВА | 2016 |
|
RU2719109C2 |
Группа изобретений относится к области очистки отработавших газов. Техническим результатом является надежность работы устройства очистки отработавших газов. Сущность изобретений заключается в том, что способ прогнозирования будущего использования автомобиля или его двигателя используют для оценки того, вероятно ли возникновение проскальзывания NOx из ловушки обедненных NOx в течение текущего ездового цикла, а также для планирования продувки ловушки обедненных NOx при благоприятных условиях до прогнозируемого возникновения проскальзывания NOx из ловушки обедненных NOx. 2 н. и 11 з.п. ф-лы, 4 ил.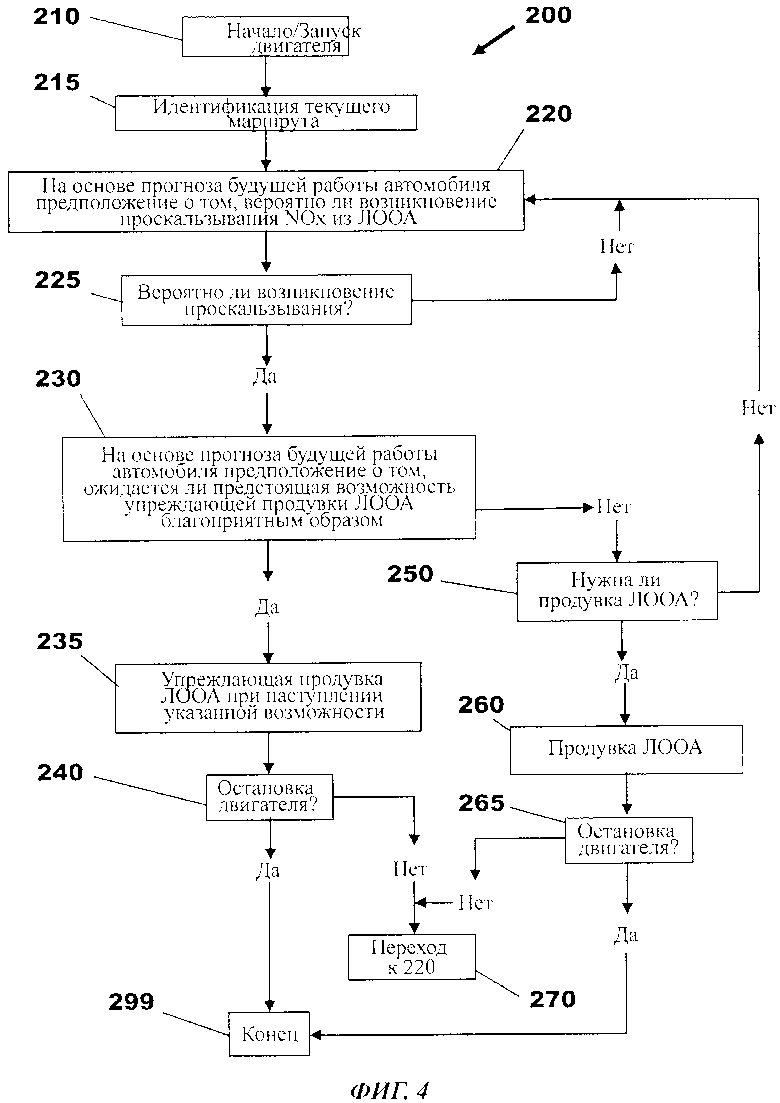
1. Способ упреждающей регенерации ловушки обедненных окисей азота (NOx), предназначенной для получения отработавших газов от двигателя автомобиля, сжигающего обедненную смесь, при этом способ содержит использование прогноза будущей работы автомобиля для оценки вероятности проскальзывания NOx из ловушки обедненных NOx в течение текущего ездового цикла, и если ожидают возникновение проскальзывания NOx в текущем ездовом цикле, используют прогноз будущей работы автомобиля для предположения того, существуют ли предстоящие возможности осуществления регенерации ловушки обедненных NOx благоприятным образом до прогнозированного возникновения проскальзывания, и если такие благоприятные возможности существуют, планируют регенерацию ловушки обедненных NOx при следующей благоприятной возможности.
2. Способ по п. 1, отличающийся тем, что вероятность возникновения проскальзывания NOx зависит от текущего уровня NOx, накопленных в ловушке обедненных NOx, и по меньшей мере от одного рабочего параметра двигателя.
3. Способ по п. 2, отличающийся тем, что вероятность возникновения проскальзывания NOx зависит от по меньшей мере двух рабочих параметров двигателя.
4. Способ по любому из пп. 2 или 3, отличающийся тем, что один из рабочих параметров двигателя представляет собой ожидаемое падение воздушно-топливного отношения.
5. Способ по любому из пп. 2 или 3, отличающийся тем, что один из рабочих параметров двигателя представляет собой ожидаемое увеличение температуры отработавших газов.
6. Способ по любому из пп. 2 или 3, отличающийся тем, что один из рабочих параметров двигателя представляет собой ожидаемое значительное изменение массового расхода отработавших газов, текущих к ловушке обедненных NOx.
7. Способ по любому из пп. 1-3, отличающийся тем, что выполнение благоприятным образом регенерации ловушки обедненных NOx планируют, когда прогноз показывает, что ожидают работу двигателя с низким воздушно-топливным отношением.
8. Способ по п. 7, отличающийся тем, что работу двигателя с низким воздушно-топливным отношением ожидают, когда нагрузка на двигатель высокая.
9. Способ по п. 8, отличающийся тем, что работу двигателя с низким воздушно-топливным отношением ожидают, когда нагрузка на двигатель высокая и когда частота вращения двигателя низкая.
10. Способ по любому из пп. 1-3, отличающийся тем, что прогноз будущей работы автомобиля получают при использовании способа прогнозирования стандартного маршрута.
11. Автомобиль, содержащий двигатель, выполненный с возможностью сжигания обедненной смеси, ловушку обедненных NOx, предназначенную для получения отработавших газов двигателя, и электронную систему обработки данных для управления регенерацией ловушки обедненных NOx, при этом электронная система обработки данных выполнена с возможностью использования прогноза будущей работы автомобиля для оценки вероятности проскальзывания NOx из ловушки обедненных NOx в течение текущего ездового цикла и, при ожидании возникновения проскальзывания NOx в текущем ездовом цикле, использования прогноза будущей работы автомобиля для предположения того, существуют ли предстоящие возможности осуществления регенерации ловушки обедненных NOx благоприятным образом до прогнозированного возникновения проскальзывания и, в случае существования таких благоприятных возможностей, планирования регенерации ловушки обедненных NOx при следующей благоприятной возможности.
12. Автомобиль по п. 11, отличающийся тем, что электронная система обработки данных также выполнена с возможностью осуществления прогнозирования будущей работы автомобиля.
13. Автомобиль по любому из пп. 11 или 12, отличающийся тем, что есть возможность получения прогноза будущей работы автомобиля при использовании способа прогнозирования стандартного маршрута.
| US 6925797 B2, 09.08.2005 | |||
| US 5771685 A, 30.06.1998 | |||
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ КАТАЛИТИЧЕСКОГО НЕЙТРАЛИЗАТОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ, ЭЛЕМЕНТ УПРАВЛЕНИЯ ДЛЯ БЛОКА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ, БЛОК УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2261340C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2247251C2 |
| US 8109080 B2, 07.02.2012. | |||

