Область техники, к которой относится изобретение
Настоящее изобретение относится к дорожным транспортным средствам, и, более конкретно, к способу улучшения работы дорожного транспортного средства и к соответствующему устройству.
Уровень техники
Хорошо известно, что различные аспекты работы дорожного транспортного средства могут быть улучшены, если есть информация о работе транспортного средства в будущем. Например, в случае гибридного транспортного средства, если известно, как будет работать транспортное средство, может быть улучшена эффективность использования и зарядка источника электрического питания. В случае транспортного средства с двигателем внутреннего сгорания, при работе транспортного средства в определенном режиме регенерация или обессеривание устройств дополнительной обработки, или добавление восстановителей в поток отработанных газов могут быть осуществлены более эффективно, и при использовании информации о работе транспортного средства в будущем эти действия могут быть запланированы к выполнению в оптимальный период времени, или тогда, когда ожидается работа двигателя транспортного средства в определенном режиме.
Прогнозирование работы транспортного средства с использованием навигационной системы предложено, например, в патенте США 7,685,813. Навигационная система, такая как система GPS, используется для прогнозирования будущего маршрута, из которого могут быть получены данные о предполагаемом использовании транспортного средства по мере его перемещения по этому маршруту.
Использование навигационной системы для прогнозирования использования или работы транспортного средства сопряжено с несколькими недостатками. Во-первых, некоторые транспортные средства не оснащены таким навигационным оборудованием, и, соответственно, такой способ не может быть применен с такими транспортными средствами. Во-вторых, если для прогнозирования работы транспортного средства требуются данные о рельефе, надо учитывать, что в настоящее время они доступны не во всех странах. В-третьих, если требуется прогнозирование всего маршрута, а не только нескольких ближайших минут работы, при использовании навигационной системы должен быть известен пункт назначения. Однако, если маршрут следования хорошо известен водителю, водитель часто не вводит пункт назначения в навигационную систему и считает необязательной и неудобной необходимость такого ввода для каждой осуществляемой поездки. Если пункт назначения не известен навигационной системе, система не может прогнозировать работу транспортного средства для всей поездки, а только для небольшого участка пути около текущего местоположения.
Раскрытие изобретения
Целью настоящего изобретения является предложение способа прогнозирования работы транспортного средства в текущем ездовом цикле, не требующего вмешательства пользователя, и экономичного во внедрении.
В соответствии с первым аспектом настоящего изобретения, предложен способ прогнозирования работы транспортного средства, содержащий этапы установления личности пользователя транспортного средства, отслеживания работы транспортного средства в течение каждой совершаемой пользователем поездки, хранения данных, собранных при отслеживании для этого пользователя, установления обычных схем работы на основе сохраненных данных для этого пользователя, сравнения текущей схемы работы с сохраненными для этого пользователя обычными схемами работы, и, если текущая схема работы соответствует какой-либо одной из обычных схем работы, сохраненных для этого пользователя, использования этой одной из сохраненных для этого пользователя обычных схем работы для прогнозирования работы транспортного средства на протяжении текущей поездки, и использования данных о прогнозируемой работе транспортного средства на протяжении текущей поездки для улучшения, по меньшей мере, одного из нижеперечисленного: зарядки аккумулятора транспортного средства, подачи восстановителя в устройство дополнительной обработки отработанных газов транспортного средства, или управления двигателем транспортного средства, обеспечивающего регенерацию устройства дополнительной обработки отработанных газов транспортного средства.
Отслеживание работы транспортного средства в каждой осуществляемой пользователем поездке может содержать отслеживание определенного числа характерных параметров во времени или по пройденной в течение поездки дистанции.
Характерными параметрами могут быть характерные параметры транспортного средства.
В качестве альтернативы, характерными параметрами могут быть характерные пользовательские параметры.
Характерными параметрами может быть сочетание характерных параметров транспортного средства и характерных пользовательских параметров.
К характерным параметрам транспортного средства могут относиться скорость вращения двигателя, скорость транспортного средства и крутящий момент двигателя.
К характерным пользовательским параметрам могут относиться положение педали акселератора, скорость изменения положения педали акселератора, положение педали тормоза, положение переключателя передач, угол поворота рулевого колеса, скорость изменения угла поворота рулевого колеса и/или положение педали сцепления.
Установление общих схем работы может содержать сравнение, по меньшей мере, двух характерных параметров работы с аналогичными характерными параметрами в ранее сохраненных схемах работы с целью определения наличия совпадения в различных схемах и, при наличии совпадений между несколькими сохраненными схемами работы, сохранение характеристик такой схемы работы в качестве обычной схемы работы.
Личность пользователя может быть установлена посредством, по меньшей мере, одного из следующих вариантов: хранящегося в брелоке кода, индикации положения водительского сиденья в транспортном средстве, сведений о выбранной водителем радиостанции, положения наружного зеркала, и веса водителя.
Сравнение текущей схемы работы с сохраненными обычными схемами работы может содержать сравнение, по меньшей мере, двух характерных параметров работы с аналогичными характерными параметрами в сохраненных обычных схемах работы и, при наличии совпадений между текущей схемой работы и одной из сохраненных обычных схем работы, использование соответствующей обычной схемы работы для прогнозирования работы транспортного средства на протяжении текущей поездки.
В соответствии со вторым аспектом настоящего изобретения, предложено транспортное средство, оснащенное электронной вычислительной системой, обеспечивающей прогнозирование работы транспортного средства в текущей поездке, причем электронная вычислительная система выполнена с возможностью установления личности пользователя транспортного средства, отслеживания работы транспортного средства в течение каждой совершаемой пользователем поездки, хранения данных, собранных при отслеживании для этого пользователя, установления обычных схем работы на основе сохраненных данных для этого пользователя, сравнения текущей схемы работы с сохраненными для этого пользователя обычными схемами работы, и, если текущая схема работы соответствует одной из обычных схем работы, сохраненных для этого пользователя, причем эта электронная вычислительная система дополнительно имеет возможность использования этой одной из сохраненных для этого пользователя общих схем работы для прогнозирования работы транспортного средства на протяжении текущей поездки, и использования данных о прогнозируемой работе транспортного средства на протяжении текущей поездки для улучшения, по меньшей мере, одного из нижеперечисленного: зарядки аккумулятора транспортного средства, подачи восстановителя в устройство дополнительной обработки отработанных газов транспортного средства, или управления двигателем транспортного средства для зрения регенерации устройства дополнительной обработки отработанных газов транспортного средства.
Эта электронная вычислительная система может быть выполнена с возможностью установления личности пользователя посредством, по меньшей мере, одного из следующих вариантов: хранящегося в брелоке кода, информации о положении водительского сиденья в транспортном средстве, информации о выбранной водителем радиостанции, положения наружного зеркала, и веса водителя.
Краткое описание чертежей
Далее настоящее изобретение будет описано на примере и со ссылкой на прилагаемые чертежи, среди которых:
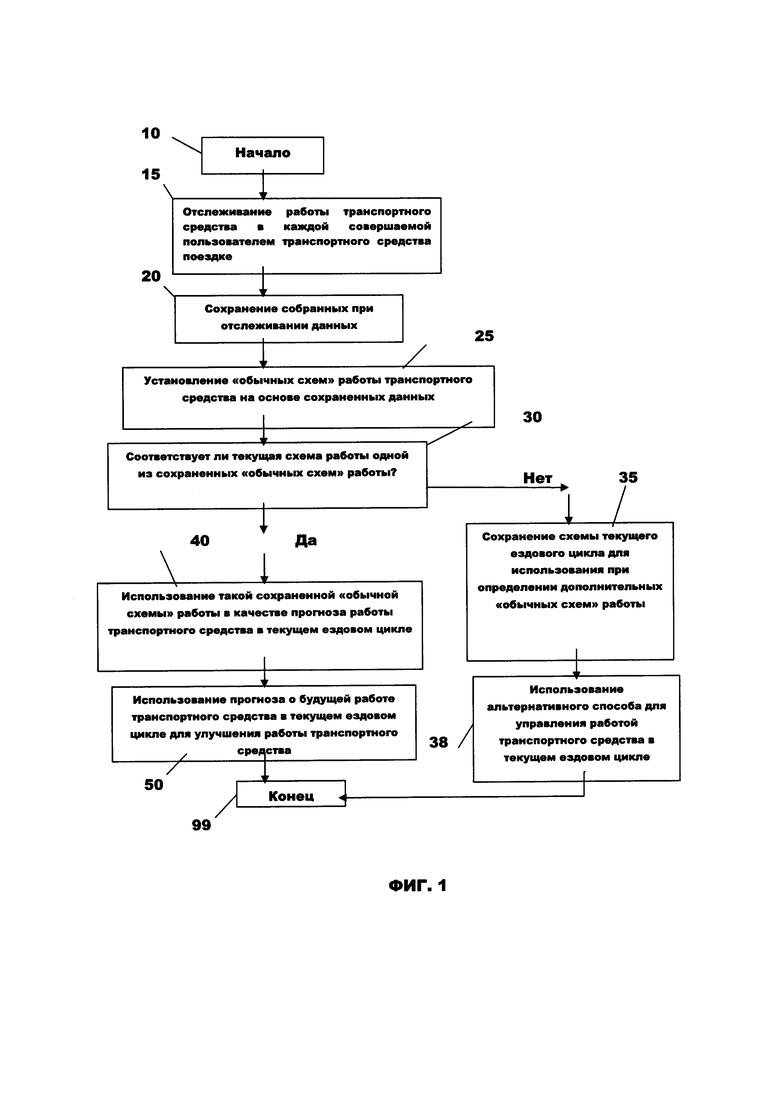
фиг. 1 представляет собой высокоуровневую блок-схему способа прогнозирования использования транспортного средства в соответствии с первым аспектом настоящего изобретения;
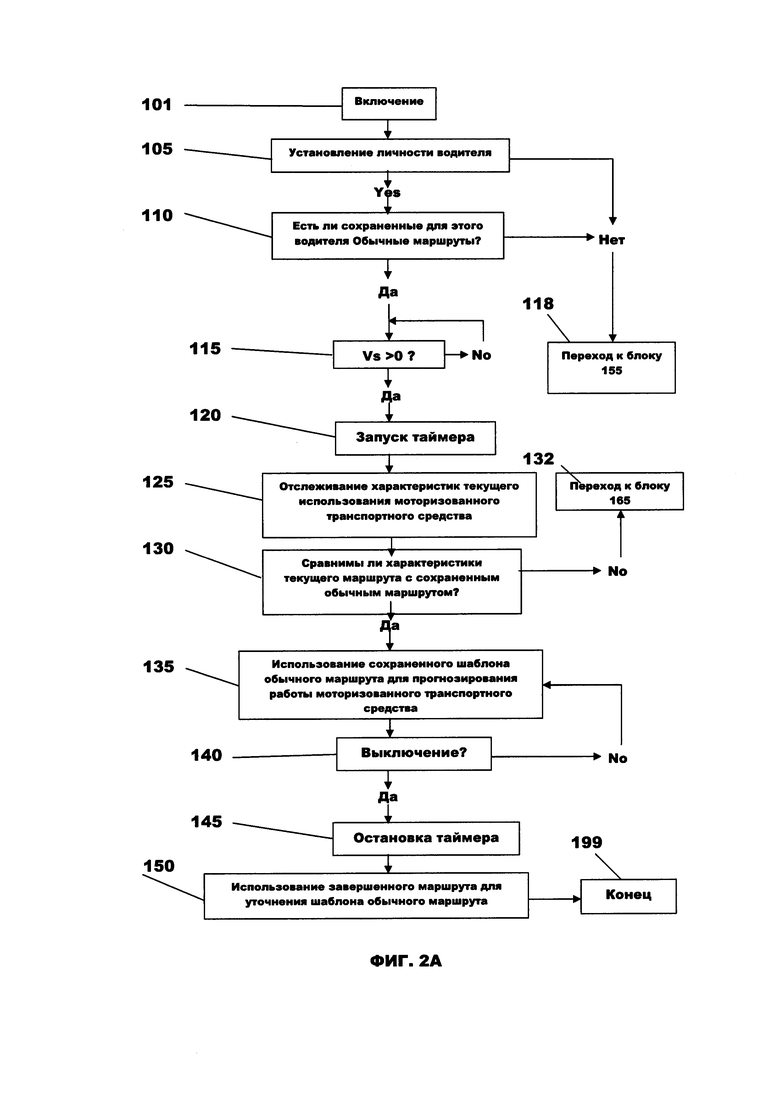
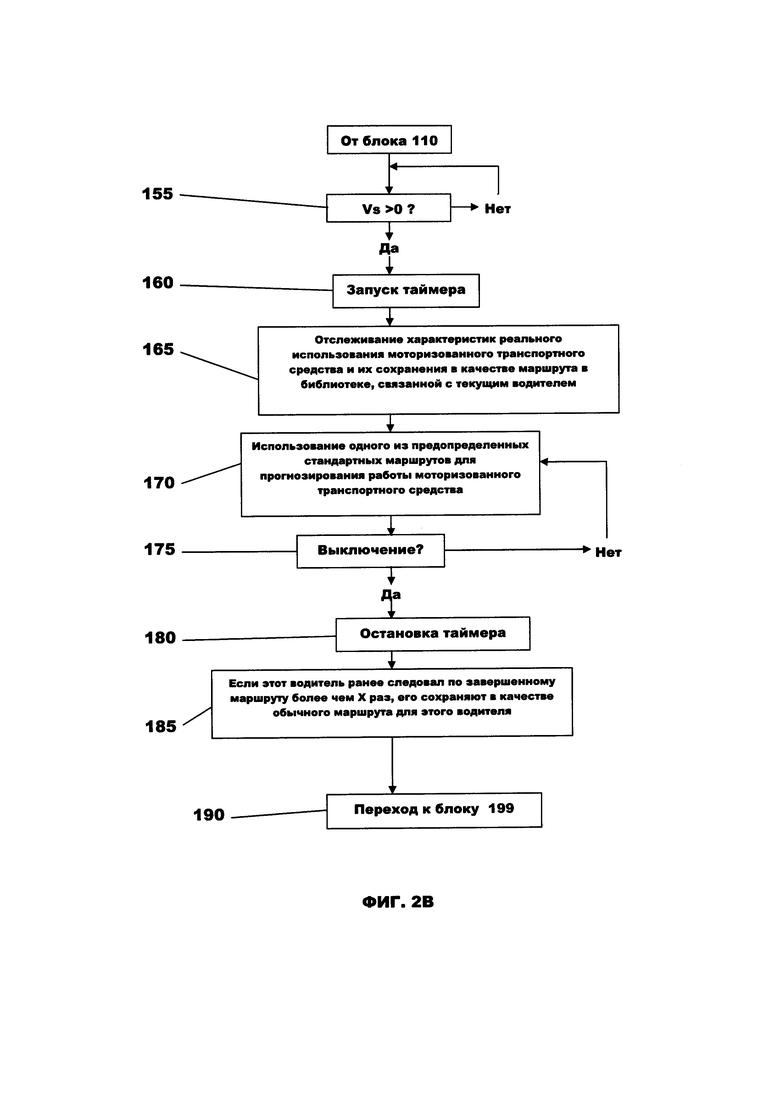
фиг. 2а и 2b представляют собой блок-схему одного из примеров использования способа в соответствии с первым аспектом настоящего изобретения, в применении к транспортному средству с несколькими известными пользователями; и
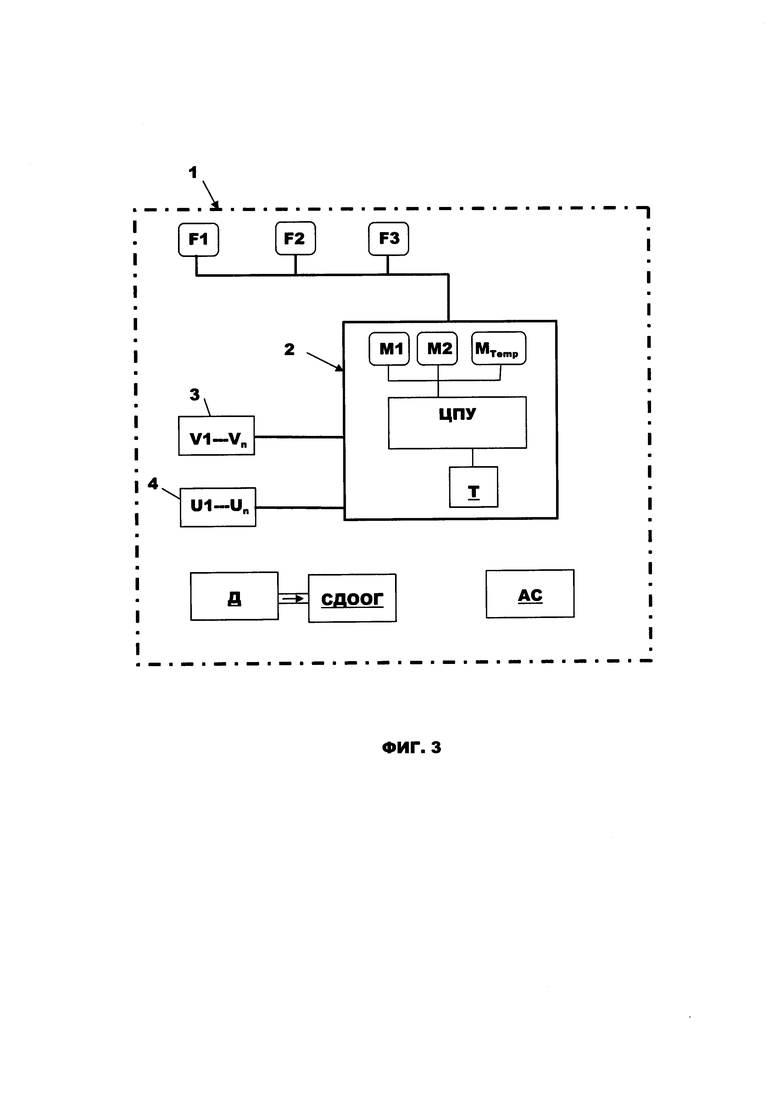
фиг. 3 представляет собой принципиальную схему транспортного средства, оснащенного системой прогнозирования работы транспортного средства в соответствии со вторым аспектом настоящего изобретения.
Осуществление изобретения
Обратимся к фиг. 1, где показан способ прогнозирования работы транспортного средства, такого как представленное на фиг. 3 транспортное средство 1.
Способ начинается в блоке 10 и затем переходит к блоку 15, в котором работа транспортного средства отслеживается в каждой поездке, совершаемой пользователем транспортного средства. Различными отслеживаемыми параметрами являются параметры, полезные как для определения следования по конкретному маршруту, так и для определения возможности оптимизации работы транспортного средства в более поздней точке текущей поездки
Под поездкой в настоящем документе понимается один ездовой цикл. Ездовой цикл может содержать период, начинающийся с события Включения и заканчивающийся событием Выключения, или начинающийся при движении транспортного средства вперед после события Включения и заканчивающийся при остановке транспортного средства с последующим событием Выключения.
Отслеживаемые параметры могут быть разделены на:
a) параметры транспортного средства, такие как, в качестве не ограничивающих примеров, скорость вращения двигателя, скорость транспортного средства, крутящий момент двигателя, передаточное отношение; и
b) пользовательские параметры, такие как, в качестве не ограничивающих примеров, положение педали акселератора, скорость изменения положения педали акселератора, положение педали тормоза, положение переключателя передач, угол поворота рулевого колеса, и скорость изменения угла поворота рулевого колеса.
Сохраняют зависимость этих параметров либо от продолжительности поездки, то есть времени, прошедшего с момента события включения, времени, прошедшего с момента определения начала первоначального движения транспортного средства после события включения, либо от измеренной пройденной дистанции, то есть дистанции, пройденной транспортным средством после события Включения.
От блока 15 способ переходит к блоку 20, в котором осуществляется сохранение собранной при отслеживании информации в запоминающем устройстве. Должно быть ясно, что сохранение информации осуществляется в реальном времени, то есть операции, на которые ссылаются блоки 15 и 20, происходят параллельно. Должно быть ясно, что собранная при отслеживании информация может храниться в виде непрерывной записи параметра в течение всего ездового цикла, или может осуществляться сохранение мгновенных значений параметра во время заранее определенных ключевых событий. В качестве не ограничивающего примера, при каждой смене передачи может осуществляться запись всех параметров в течение заранее определенного периода времени после смены передачи.
От блока 20 способ переходит к блоку 25, в котором устанавливают «обычные схемы» работы транспортного средства. У большинства водителей есть определенное количество маршрутов, которыми они пользуются часто, такие маршруты в настоящем документе упоминаются как «обычные маршруты». В качестве не ограничивающих примеров, это маршрут из дома на работу, маршрут с работы домой, маршрут из дома в супермаркет, маршрут из дома в школу ребенка, маршрут из дома к спортивному объекту, такому как тренажерный зал, плавательный бассейн, гольф клуб, футбольный клуб, и многие другие маршруты частого следования.
При движении по такому обычному маршруту транспортное средство каждый раз работает сходным образом, и характерный режим работы транспортного средства означает, что при его записи и распознавании он может быть использован для прогнозирования работы транспортного средства.
В качестве не ограничивающего примера, если на пути по маршруту на работу транспортное средство должно пройти круговой перекресток (перекресток с круговым движением) приблизительно через две минуты после первоначального трогания с места, после чего происходит ускорение на шоссе, итоговое сочетание параметров транспортного средства и пользовательских параметров используется для распознавания маршрута, по которому в настоящее время следует транспортное средство.
Таким образом, посредством анализа сохраненных данных о предыдущих поездках может быть накоплена библиотека обычных маршрутов. В качестве не ограничивающего примера, если число проявлений характерных признаков работы на маршруте в течение заранее определенного периода времени больше заранее определенного значения, маршрут может быть классифицирован как обычный маршрут. Например, если упомянутое выше сочетание параметров транспортного средства и пользовательского ввода проявляется пять раз в течение четырехнедельного периода, или пять раз в течение 20 ездовых циклов, такая конкретная комбинация параметров сохраняется в качестве обычного маршрута. В противном случае, ее сохраняют для последующего использования, поскольку она может стать обычным маршрутом при следующем ездовом цикле.
В качестве альтернативы, при, по меньшей мере, однократном движении по маршруту, его добавляют в библиотеку обычных маршрутов, и библиотеку обычных маршрутов сортируют на основе частоты их использования, причем маршруты, которые не повторяются в течение заранее определенного периода времени, удаляют.
От блока 25 способ переходит к блоку 30, в котором текущий маршрут движения сравнивают с обычными маршрутами, сохраненными в библиотеке, и если одно или несколько характерных сочетаний параметров, проявившихся в текущем ездовом цикле, оказывается присутствующим в одном из обычных маршрутов, считается, что транспортное средство следует этому конкретному обычному маршруту, и способ переходит к блоку 40, в котором сохраненный обычный маршрут используют для прогнозирования работы транспортного средства. Например, если через одну минуту после первоначального трогания с места, следующего за событием включения, или на расстоянии в 0,5 км от начала движения в текущей поездке, установлено, что транспортное средство следует по какому-либо конкретному из сохраненных в блоке 30 обычных маршрутов, то в блоке 40 может быть осуществлено прогнозирование работы транспортного средства на оставшейся части маршрута.
Затем эта информация может быть использована для улучшения работы транспортного средства на оставшейся части текущего ездового цикла, или в течение короткого заранее определенного периода времени, следующего за текущим моментом времени, в зависимости от того, какой аспект работы транспортного средства должен быть улучшен. Например, если улучшаемым аспектом работы транспортного средства является зарядка аккумулятора, может быть спрогнозировано, что через промежуток времени в «X» минут, вероятно, произойдет событие вращения двигателя за счет наката, и поэтому нет необходимости использовать двигатель для зарядки аккумулятора сейчас, так как он может быть заряжен во время события вращения двигателя от наката, что обеспечивает экономию топлива. Что касается устройства контроля выбросов, может быть спрогнозировано, что ближайшие две минуты будут хорошим моментом для добавления восстановителя или для регенерации устройства дополнительной обработки.
Должно быть ясно, что если транспортное средство 1 отклоняется от обычного маршрута, использование прогноза, полученного в блоке 50, невозможно, поэтому управление регенерацией должно быть обеспечено каким-либо другим образом. В таком случае способ может перейти от блока 50 к блоку 38.
Однако, обычно от блока 50 способ переходит к блоку 99, в котором он завершается при наступлении события выключения.
Возвращаясь к блоку 30, если текущая схема работы не соответствует ни одному из сохраненных обычных маршрутов, способ переходит по ответвлению к блоку 35, в котором сохраняются рабочие характеристики текущего маршрута. Должно быть ясно, что обычные маршруты могут быть определены только при использовании транспортного средства, и в новом транспортном средстве обычные маршруты отсутствуют, а при передаче транспортного средства новому владельцу обычные маршруты становятся недействительными. Поэтому в течение периода определения обычных маршрутов и во все время использования транспортного средства каждый из маршрутов сохраняется и анализируется для оценки возможности его установления в качестве обычного маршрута.
От блока 35 способ переходит к блоку 38, в котором для управления транспортным средством в текущем ездовом цикле должен быть использован альтернативный способ управления, поскольку отсутствуют прогнозы работы, но могут быть использованы ожидаемые маршруты, основанные на стандартной информации. Однако, управление транспортным средством должно осуществляться без преимуществ актуального прогноза работы транспортного средства в текущей поездке.
Как и раньше, способ завершается в блоке 99 при наступлении события выключения.
Должно быть ясно, что параметры, используемые для определения следования транспортного средства по обычному маршруту, и, следовательно, параметры, используемые для установления характеристик обычного маршрута, не должны быть теми же параметрами, знание которых требуется для улучшения конкретной функции транспортного средства. Например, оценка угла поворота рулевого колеса во времени или по отношению к пройденному расстоянию, а также передаточного отношения во времени или по отношению к пройденному расстоянию, могут быть использованы для установления корреляции между текущим маршрутом и одним из сохраненных обычных маршрутов, но информацией, которая требуется в будущем, могут быть скорость транспортного средства и положение педали акселератора, которые также сохраняются, но не используются для определения того, является ли текущий маршрут обычным маршрутом. В качестве не ограничивающего примера, с использованием угла поворота рулевого колеса и передаточного отношения может быть установлен факт следования транспортным средством по обычному маршруту, и может быть определено положение на обычном маршруте, в котором находится транспортное средство. При использовании этой информации может быть осуществлен анализ скорости транспортного средства и положения педали акселератора для прогнозирования работы транспортного средства в текущей поездке с целью нахождения момента времени или расстояния от точки начала поездки, в которых ожидается замедление транспортного средства в течение значительного периода времени, когда педаль акселератора не задействована, что может быть использовано для планирования зарядки аккумулятора транспортного средства посредством преобразования кинетической энергии транспортного средства в электрическую энергию.
Способ использования сохраненных обычных маршрутов для прогнозирования работы транспортного средства в дальнейшем упоминается как способ прогнозирования посредством обычных маршрутов (СПОМ).
Что касается фиг. 2а и 2b, здесь показан один конкретный вариант реализации использования СПОМ в применении к представленному на фиг. 3 транспортному средству 1.
Транспортное средство 1 содержит двигатель «Д», систему дополнительной обработки отработанных газов («СДООГ») для двигателя Д, аккумуляторную систему «АС», электронную вычислительную систему (ЭВС) 2, контролирующее устройство 3 транспортного средства, обеспечивающее информацию для ЭВС 2 о наборе параметров транспортного средства (V1-Vn), таких как, в качестве не ограничивающего примера, скорость вращения двигателя, скорость транспортного средства, крутящий момент двигателя и передаточное отношение, и контролирующее устройство 4 пользователя, обеспечивающее информацию для ЭВС 2 о наборе пользовательских параметров (U1-Un), таких как, в качестве не ограничивающего примера, положение педали акселератора, скорость изменения положения педали акселератора, положение педали тормоза, положение переключателя передач, угол поворота рулевого колеса и скорость изменения угла поворота рулевого колеса.
Контролирующее устройство 3 транспортного средства и контролирующее устройство 4 пользователя используют входные сигналы от датчиков, которыми современные транспортные средства часто уже оснащены для более эффективного управления двигателем Д транспортного средства 1, снижения загрязнений от отработанных газов двигателя Д транспортного средства 1 или для автоматической остановки и запуска двигателя Д транспортного средства 1. В качестве не ограничивающего примера, что касается параметров транспортного средства, их отслеживание может осуществляться посредством датчика скорости вращения двигателя, датчика скорости транспортного средства, датчика, определяющего требуемый крутящий момент, датчика массового расхода воздуха, и других подобных датчиков, используемых для выдачи сигналов, которые указывают на динамическое состояние транспортного средства или функциональных элементов транспортного средства, таких как двигатель и коробка переключения передач. Что касается пользовательских параметров, их отслеживание может быть осуществлено посредством датчика положения педали акселератора, датчика педали тормоза, датчика педали сцепления, датчика переключателя передач, датчика угла поворота рулевого колеса и других подобных датчиков, используемых для формирования сигналов, соответствующих управляющим сигналам водителя.
Должно быть ясно, что конкретные используемые датчики зависят от конструкции конкретного используемого транспортного средства, и не обязательно должны использоваться все вышеупомянутые датчики. Кроме того, в некоторых вариантах осуществления, в качестве альтернативы, или дополнительно, могут быть использованы другие датчики, не упомянутые выше.
ЭВС 2 содержит несколько запоминающих устройств "М1", "М2", "МTemp", центральное процессорное устройство (ЦПУ) и таймер «Т». Должно быть ясно, что ЭВС 2 изображена схематически и не должна восприниматься как отображение реальной электронной вычислительной системы.
Запоминающее устройство М1 используется для хранения схем работы транспортного средства на обычных маршрутах, связанных с первым водителем, и запоминающее устройство М2 используется для хранения схем работы транспортного средства на обычных маршрутах, связанных со вторым водителем.
Запоминающее устройство МTemp используется для хранения информации во время текущего ездового цикла, а также схем работы в предыдущих ездовых циклах, которые пока не были классифицированы как обычные маршруты. Запоминающее устройство МTemp периодически очищают или освобождают от хранящейся информации. В качестве не ограничивающего примера, если маршрут не повторялся в течение заранее определенного периода времени или заранее определенного количества ездовых циклов, считается, что он вряд ли станет обычным маршрутом, поэтому его не требуется оставлять в запоминающем устройстве, и его удаляют.
ЭВС 2 выполнена с возможностью повышения эффективности одной или нескольких функций транспортного средства 1 и, несмотря на то, что показаны три функции F1, F2 и F3, должно быть ясно, что может быть улучшена эффективность работы большего или меньшего количества функций, и что настоящее изобретение не ограничено описанными функциями, которые упомянуты исключительно для примера.
В данном примере функцией F1 является зарядка аккумулятора, входящей в состав аккумуляторной системы АС, функцией F2 является подача восстановителя в устройство дополнительной обработки отработанных газов, входящее в состав системы СДООГ дополнительной обработки отработанных газов, и функцией F3 является управление двигателем Д с целью обеспечения возможности регенерации устройства дополнительной обработки отработанных газов, входящего в состав системы СДООГ дополнительной обработки отработанных газов. Общее свойство всех этих функций в том, что для обеспечение их выполнения или осуществления с более высокой эффективностью или с уменьшенным негативным влиянием на окружающую среду предпочтительно иметь информацию о будущем использовании транспортного средства 1 в текущем ездовом цикле.
Если обратиться вновь к фиг. 2а и 2b, видно, что способ начинается в блоке 101 событием Включения, и затем продолжается в блоке 105. В данном случае установление личности пользователя транспортного средства 1 осуществляется посредством кода, переносимого в брелоке (не показан), используемом для открытия транспортного средства 1, поэтому личность пользователя транспортного средства 1 известна сразу же после открытия транспортного средства 1. Однако, это не является обязательным, и установление личности пользователя может осуществляться на основе манеры выполнения пользователем различных операций, или по настройке пользователем различных функций транспортного средства. В качестве не ограничивающего примера, положение водительского сиденья, вес водителя, положение одного или более зеркал, выбор конкретной радиостанции, манеры ускорения и замедления транспортного средства, такие как агрессивная или плавная, могут быть использованы для обеспечения установления того факта, является ли текущий водитель известным пользователем транспортного средства.
Установление личности пользователя транспортного средства 1 является полезным, поскольку различные пользователи, вероятно, используют различные обычные маршруты, а также поскольку два водителя, осуществляющие движение по одному и тому же маршруту, вероятно, делают это с различными характеристиками работы транспортного средства, поэтому при известной личности водителя облегчается установление корреляции между текущим маршрутом движения и сохраненным обычным маршрутом. Должно быть ясно, что если для установления личности пользователя используется реальное использование транспортного средства, блок 105 должен быть расположен в последовательности событий позже, поскольку для установления личности водителя может требоваться движение транспортного средства 1.
Что касается блока 105, если личность пользователя не может быть установлена, способ переходит по ответвлению к блоку 118, а затем к блоку 155, описание которого дано ниже, но если личность пользователя установлена в блоке 105, способ продолжается в блоке 110, в котором осуществляется проверка существования каких-либо обычных маршрутов для текущего пользователя. Если обычные маршруты существуют в соответствующем запоминающем устройстве М1, М2, способ продолжается в блоке 115, а если они не существуют, способ переходит по ветвлению к блоку 118, и затем к блоку 155, описание которого дано ниже.
В блоке 115 осуществляется проверка того, двигается ли транспортное средство 1 вперед, и если нет, то способ возвращается для повторной проверки скорости транспортного средства 1 в блоке 115, а если транспортное средство 1 двигается вперед, то способ переходит от блока 115 к блоку 120, в котором запускается таймер, такой как таймер Т1. Запуск таймера T определяет начало ездового цикла, который продолжается до тех пор, пока таймер T не остановлен в блоке 145. В других вариантах осуществления начальная и конечная точки ездового цикла основываются на событиях Включения и Выключения, соответственно, и в качестве шкалы отсчета используется расстояние, пройденное транспортным средством с момента события Включения.
От блока 120 способ переходит к блоку 125, в котором осуществляется отслеживание характерных параметров транспортного средства 1. Фактически, отслеживание различных характерных параметров, необходимых для построения обычных маршрутов или определения факта движения транспортного средства 1 по обычному маршруту, начинается сразу же после запуска таймера Т.
От блока 125, и при отслеживании и сохранении различных параметров во временном запоминающем устройстве МTemp, способ переходит к блоку 130 для определения факта соответствия текущего маршрута движения одному из обычных маршрутов, сохраненных для текущего пользователя. На этом этапе осуществляется сравнение различных характерных параметров с аналогичными параметрами, сохраненными в качестве части обычного маршрута в аналогичный момент времени, прошедшего с начала поездки, или для аналогичного пройденного расстояния. Например, может быть проведено сравнение изменения во времени таких параметров транспортного средства, как скорость вращения двигателя, скорость транспортного средства и выходной крутящий момент двигателя или требуемый крутящий момент, для определения наличия в текущем маршруте схем, аналогичных одному из сохраненных для текущего пользователя обычных маршрутов.
Должно быть ясно, что к этим параметрам могут быть применены поля допуска, допускающие небольшое отклонение текущих значений от сохраненных в качестве характерных для обычного маршрута.
В качестве альтернативы, или в дополнение к использованию параметров транспортного средства, могут быть сравнены пользовательские параметры. Например, может быть проведено сравнение значений угла поворота рулевого колеса и положения педали акселератора во времени, или положения переключателя передач и положения педалей сцепления или тормоза во времени.
За счет использования сочетания как параметров транспортного средства, так и пользовательских параметров, увеличивается вероятность достоверности положительного результата сравнения.
Если результат сравнения в блоке 130 указывает на отсутствие сравнимых с текущим маршрутом сохраненных обычных маршрутов, способ переходит по ветвлению к блоку 132, и затем к блоку 165, описание которого приведено ниже.
Однако, если в запоминающем устройстве М1 или М2, в зависимости от текущего пользователя транспортного средства 1, найден сравнимый обычный маршрут, способ продолжается в блоке 135, в котором этот сохраненный обычный маршрут принимается в качестве достоверного прогноза работы транспортного средства 1 в текущем ездовом цикле.
Таким образом, будущие значения различных параметров транспортного средства и пользовательских параметров могут быть спрогнозированы на основе значений, которые сохранены в виде части обычного маршрута, и они могут быть использованы в процессе принятия решений, направленных на оптимизацию или улучшение работы функций F1-F3, на которые в данном примере оказывает влияние выход ЭВС 2.
Должно быть ясно, что если транспортное средство 1 отклоняется от обычного маршрута, использование прогноза, полученного в блоке 135, невозможно, поэтому управление регенерацией должно быть обеспечено каким-либо другим образом. В таком случае способ может перейти или продвинуться от блока 135 к блоку 170.
Однако, обычно способ продолжается от блока 135 к блоку 140 для проверки наступления события Выключения, и, если оно не наступило, способ возвращается к блоку 135 для продолжения использования сохраненного обычного маршрута в качестве прогноза будущих событий, и этот процесс продолжается, пока транспортное средство 1 не достигнет пункта назначения в текущем ездовом цикле, и наступит событие Выключения. Поэтому события, наступающие близко к окончанию ездового цикла, будь то события, связанные с параметрами транспортного средства, или события, связанные с пользовательскими параметрами, могут быть спрогнозированы, как только в блоке 130 подтверждено, что текущий маршрут сравним с одним из сохраненных обычных маршрутов.
При наступлении окончания текущего ездового цикла, на что указывает событие Выключения, способ переходит от блока 140 к блоку 145, и таймер T останавливается. После этого все данные о завершившемся только что маршруте используются для уточнения шаблона обычного маршрута, то есть любые небольшие вариации реально произошедших событий по отношению к спрогнозированным используются для корректирования шаблона обычной поездки, например, посредством изменения допусков, позволяющих принять положительное решение при сравнении, или посредством корректирования прогнозных значений, сохраненных в шаблоне обычной поездки, на основе вновь созданной записи.
После этого способ завершается в блоке 199.
Что касается блока 118, способ переходит от блока 118 к блоку 155, и этот переход происходит либо потому, что личность водителя не может быть установлена, либо потому, что для текущего водителя сохраненные обычные маршруты отсутствуют.
В блоке 155 осуществляется проверка того, двигается ли транспортное средство 1 вперед, и если нет, то способ возвращается для повторной проверки скорости транспортного средства 1 в блоке 155, а если транспортное средство 1 двигается вперед, то способ переходит от блока 155 к блоку 160, в котором запускается таймер, такой как таймер Т1. Запуск таймера T определяет начало ездового цикла, который продолжается до тех пор, пока таймер T не остановлен в блоке 180.
От блока 160 способ переходит к блоку 165, в котором осуществляется отслеживание характерных параметров транспортного средства 1, и их сохранение, например, во временном запоминающем устройстве МTemp. Фактически, отслеживание различных характерных параметров, необходимых для построения обычных маршрутов, начинается сразу же после запуска таймера Т. Этот этап используется для начала создания библиотеки обычных маршрутов для текущего пользователя, если пользователь известен, или для потенциального использования в будущем, если пользователь, личность которого не установлена на данный момент, будет часто использовать транспортное средство. Переход к блоку 165 также осуществляется от блока 130 в случае, если определено, что текущий маршрут транспортного средства 1 не сравним ни с одним из сохраненных обычных маршрутов.
От блока 165 способ переходит к блоку 170, в котором, в этом случае, для краткосрочного прогнозирования работы транспортного средства 1 используется один из множества сохраненных стандартных маршрутов. Стандартные маршруты описывают ожидаемую работу транспортного средства при управлении им в определенных ситуациях, таких как, например, в трафике большого города, в трафике города, на шоссе. Такие стандартные маршруты могут быть определены посредством глубоких исследований, и могут обеспечивать возможность краткосрочного прогнозирования предстоящих событий, которые могут быть использованы для улучшения работы функций F1-F3, связанных с ЭВС 2. В качестве альтернативы этому подходу, для различных функций F1-F3 могут быть применены стандартные стратегии управления, как было бы в случае недоступности способа прогнозирования.
От блока 170 способ переходит к блоку 175, который является проверкой наступления события Выключения. Если событие Выключения не наступило, способ возвращается к блоку 170.
Таким образом, в случае использования стандартных маршрутов краткосрочное прогнозирование работы транспортного средства может быть обеспечено на всем протяжении текущего ездового цикла, как показано стрелкой возврата от блока 175 к блоку 170.
При наступлении же события Выключения способ переходит от блока 175 к блоку 180, в котором останавливается таймер Т, и затем переходит к блоку 185, в котором осуществляется анализ только что завершенного маршрута для определения того, использовался ли сравнимый маршрут ранее более чем заранее определенное число (X) раз. Если таким маршрутом следовали более чем X раз, его сохраняют в одно из запоминающих устройств М1, М2 в качестве обычного маршрута для текущего водителя, если личность водителя известна, или сохраняют во временном запоминающем устройстве МTemp с целью последующих сравнений.
После блока 185 способ переходит через блок 190 к блоку 199, в котором он завершается.
Таким образом, в целом, настоящее изобретение предлагает использование характерных параметров транспортного средства и/или пользовательских параметров для определения некоторого количества обычных маршрутов, которые могут быть использованы для прогнозирования работы транспортного средства после подтверждения того факта, что текущий маршрут следования сравним с одним из обычных маршрутов.
Упомянутый способ может дополнительно содержать запоминание последнего места остановки транспортного средства, и использование этого для ускорения распознавания нахождения транспортного средства на обычном маршруте. Например, если транспортное средство в последний раз останавливалось около супермаркета, следующий маршрут, вероятно, будет от супермаркета домой, и этот обычный маршрут может быть проверен в первую очередь.
Аналогичным образом, если последним маршрутом был маршрут с работы домой, следующим маршрутом, вероятно, будет маршрутом от дома обратно на работу, поэтому это может быть проверено в первую очередь.
Одним из преимуществ настоящего изобретения является возможность автоматического прогнозирования работы транспортного средства без вмешательства пользователя транспортного средства. Дополнительным преимуществом настоящего изобретения является возможность осуществления отслеживания как параметров транспортного средства, так и пользовательских параметров, посредством датчиков, которыми транспортное средство часто уже оснащено для других целей, поэтому настоящее изобретение во многих случаях может быть реализовано с минимальными дополнительными затратами. Дополнительным преимуществом является возможность применения настоящего изобретения к транспортным средствам, не оснащенным навигационной системой, или в странах, в которых еще не проведено подробное цифровое картографирование дорог.
Еще одно преимущество в том, что, как только установлен факт движения транспортного средства по обычному маршруту, работа транспортного средства может быть спрогнозирована на всей оставшейся части маршрута.
Несмотря на то, что настоящее изобретение не требует использования навигационной системы, должно быть ясно, что оно может быть с пользой применено на транспортном средстве, оснащенном такой системой. Также необходимо понимать, что в случае транспортного средства, оснащенного навигационной системой, навигационная система может быть использована для предоставления информации о текущем географическом положении транспортного средства, что способствует сравнению текущего маршрута с сохраненными обычными маршрутами.
Настоящее изобретение применимо со всеми типами дорожных транспортных средств, для которых есть необходимость улучшения работы транспортного средства на основе прогнозирования работы транспортного средства в текущей поездке. Таким образом, упомянутый способ может быть использован с пользой в полностью гибридных транспортных средствах, микро-гибридных транспортных средствах, традиционных моторных транспортных средствах с двигателем внутреннего сгорания, и в транспортных средствах на электротяге.
Специалисту в области техники должно быть ясно, что, несмотря на описание настоящего изобретения на примерах со ссылками на один или несколько вариантов осуществления, оно не ограничено описанными вариантами осуществления, и могут быть сконструированы альтернативные варианты осуществления, не выходящие за объем настоящего изобретения, определенный прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРЕЖДАЮЩЕЙ РЕГЕНЕРАЦИИ ЛОВУШКИ ОБЕДНЕННЫХ ОКИСЕЙ АЗОТА | 2015 |
|
RU2696838C2 |
| СПОСОБ ТЕСТИРОВАНИЯ НА УТЕЧКУ ТОПЛИВНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СПОСОБ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2675771C2 |
| СПОСОБ БОРТОВОЙ ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СПОСОБ БОРТОВОЙ ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2015 |
|
RU2670579C2 |
| КОНФИГУРИРОВАНИЕ НОСИМОГО УСТРОЙСТВА С ПОМОЩЬЮ ДАННЫХ ТРАНСПОРТНОГО СРЕДСТВА И ОБЛАЧНЫХ ДАННЫХ О СОБЫТИИ | 2015 |
|
RU2700945C1 |
| СИСТЕМА АДАПТИВНОГО ИНТЕРФЕЙСА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2682102C2 |
| СИСТЕМА ПЛАНИРОВАНИЯ РАБОТЫ БЕСПРОВОДНОГО МАЯКА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2700217C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ ОСТАТОЧНОГО РЕСУРСА ФИЛЬТРА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2717575C2 |
| УПРАВЛЕНИЕ СИЛОВЫМ АГРЕГАТОМ НА ОСНОВАНИИ СНИЖЕНИЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ И ТОРМОЗНОЙ СПОСОБНОСТИ | 2017 |
|
RU2688567C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ОТСЛЕЖИВАНИЯ СОДЕРЖИМОГО ИНВЕНТАРЯ | 2014 |
|
RU2686275C2 |
| СПОСОБ ЗАПРАВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2714215C2 |
Изобретение относится к транспортным средствам. В способе прогнозирования работы транспортного средства (ТС) устанавливают личность пользователя ТС; отслеживают рабочие параметры ТС для каждой поездки; сохраняют данные, собранные при отслеживании для этого пользователя; устанавливают и хранят обычные схемы работы на основе сохраненных данных для этого пользователя; определяют текущую обычную схему работы с учетом пользователя ТС, одного или более рабочих параметров и сохраненных обычных схем работы; используют текущую обычную схему работы для прогнозирования работы ТС на протяжении текущей поездки. Также используют данные о прогнозируемой работе ТС на протяжении текущей поездки для улучшения зарядки аккумулятора ТС, подачи восстановителя в устройство дополнительной обработки отработанных газов ТС и управления двигателем с целью регенерации устройства дополнительной обработки отработанных газов ТС. Способ осуществляют с помощью электронной вычислительной системы. Не требуется вмешательства пользователя. 2 н. и 7 з.п. ф-лы, 4 ил.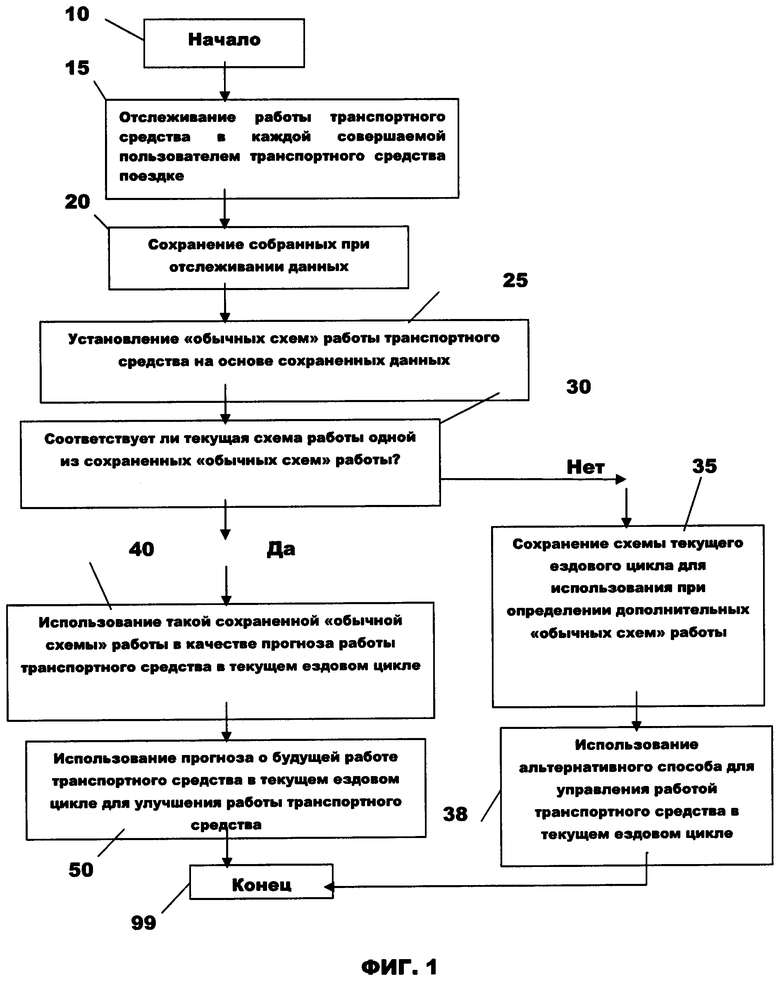
1. Способ прогнозирования работы транспортного средства, содержащий этапы
установления личности пользователя транспортного средства,
отслеживания одного или более рабочих параметров транспортного средства для каждой совершаемой пользователем поездки,
хранения данных, собранных при отслеживании для этого пользователя,
установления и хранения обычных схем работы на основе сохраненных данных для этого пользователя,
определения текущей обычной схемы работы с учетом пользователя транспортного средства, одного или более рабочих параметров и сохраненных обычных схем работы,
использования текущей обычной схемы работы для прогнозирования работы транспортного средства на протяжении текущей поездки, и
использования данных о прогнозируемой работе транспортного средства на протяжении текущей поездки для улучшения, по меньшей мере, одного из нижеперечисленного: зарядки аккумулятора транспортного средства, подачи восстановителя в устройство дополнительной обработки отработанных газов транспортного средства и управления двигателем транспортного средства с целью регенерации устройства дополнительной обработки отработанных газов транспортного средства,
причем способ осуществляют с помощью электронной вычислительной системы.
2. Способ по п. 1, в котором один или более рабочих параметров отслеживают по времени или по пройденной в течение поездки дистанции.
3. Способ по п. 2, в котором один или более рабочих параметров представляют собой характерные параметры транспортного средства, в число которых входят скорость вращения двигателя, скорость транспортного средства и крутящий момент двигателя.
4. Способ по п. 2, в котором один или более рабочих параметров представляют собой характерные пользовательские параметры, выбранные из положения педали акселератора, скорости изменения положения педали акселератора, положения педали тормоза, положения переключателя передач, угла поворота рулевого колеса, скорости изменения угла поворота рулевого колеса и положения педали сцепления.
5. Способ по п. 2, в котором установление общих схем работы содержит сравнение, по меньшей мере, двух рабочих параметров с аналогичными параметрами сохраненных схем работы с целью определения наличия совпадения в различных схемах работы и при наличии совпадений между несколькими сохраненными схемами работы сохранение характеристик такой схемы работы в качестве обычной схемы работы.
6. Способ по п. 1, в котором установление личности пользователя осуществляют посредством, по меньшей мере, одного из следующих вариантов: хранящегося в брелоке кода, информации о положении сиденья пользователя транспортного средства, информации о выбранной пользователем транспортного средства радиостанции, положения наружного зеркала и веса пользователя транспортного средства.
7. Способ по п. 2, в котором определение дополнительно содержит сравнение, по меньшей мере, двух рабочих параметров с аналогичными параметрами в сохраненных обычных схемах работы и при наличии совпадений между текущей схемой работы и одной из сохраненных обычных схем работы использование соответствующей обычной схемы работы для прогнозирования работы транспортного средства для текущей поездки.
8. Транспортное средство, оснащенное электронной вычислительной системой для обеспечения прогнозирования работы транспортного средства для текущей поездки, причем электронная вычислительная система выполнена с возможностью
установления личности пользователя транспортного средства,
отслеживания одного или более рабочих параметров транспортного средства для каждой совершаемой пользователем поездки,
хранения в запоминающем устройстве данных, собранных при отслеживании для этого пользователя,
установления и хранения обычных схем работы на основе сохраненных данных для этого пользователя,
определения текущей обычной схемы работы на основе сравнения текущей схемы работы с сохраненными для этого пользователя обычными схемами работы,
использования текущей обычной схемы работы для прогнозирования работы транспортного средства на протяжении текущей поездки, если текущая схема работы соответствует какой-либо одной из обычных схем работы, сохраненных для этого пользователя, и
использования данных о прогнозируемой работе транспортного средства на протяжении текущей поездки для улучшения, по меньшей мере, одного из нижеперечисленного: зарядки аккумулятора транспортного средства, подачи восстановителя в устройство дополнительной обработки отработанных газов транспортного средства и управления двигателем транспортного средства для регенерации устройства дополнительной обработки отработанных газов транспортного средства.
9. Транспортное средство по п. 8, в котором электронная вычислительная система выполнена с возможностью установления личности пользователя посредством, по меньшей мере, одного из следующих вариантов: хранящегося в брелоке кода, информации о положении сиденья пользователя транспортного средства, информации о выбранной пользователем транспортного средства радиостанции, положения наружного зеркала и веса пользователя транспортного средства, при этом указанное определение также основано на личности пользователя.
| US 2014257608 А1, 11.09.2014 | |||
| US 5734971 А, 31.03.1998 | |||
| JP 2004108777 A, 08.04.2004 | |||
| ПРИВОД СТРЕЛОЧНОГО ПЕРЕВОДА | 2012 |
|
RU2499712C1 |
| JP 2012108753 A, 07.06.2012. | |||

