ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая патентная заявка притязает на приоритет по предварительной заявке на патент США, порядковый номер 62/058 851, озаглавленной "ЭФФЕКТИВНОЕ ПРОГНОЗНОЕ УПРАВЛЕНИЕ НА ОСНОВЕ АДАПТИВНОЙ МОДЕЛИ ДЛЯ ОПТИМАЛЬНОГО ПЛАНИРОВАНИЯ МАРШРУТА АВТОМОБИЛЯ", зарегистрированной 2 октября 2014 г. и целиком включенной для любого использования в настоящее описание посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение, в общем, относится к способам и системам для планирования маршрута автомобиля.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ/СУЩНОСТЬ ИЗОБРЕТЕНИЯ
При усовершенствованном планировании маршрута оптимальный профиль скорости автомобиля может быть рассчитан, если известны возмущения на маршруте, например, уклон дороги, интенсивность движения и т.п. Расчет оптимального профиля скорости может быть представлен в виде задачи модельного прогнозного управления (МПУ), при котором вместо расчета всего профиля скорости для всего маршрута, маршрут может быть разбит на горизонты прогноза в несколько секунд или минут. Чтобы в задаче МПУ получить на выходе системы желаемые выходные данные, для заданного интервала рассчитываются оптимальные входные данные. Расчет первых входных данных реализуется системой автомобиля. Затем весь горизонт прогноза продвигают вперед на один шаг и пересчитывают оптимальные входные данные.
Одной из проблем при реализации МПУ является сокращение времени расчета. Время расчета для МПУ тесно связано с длиной горизонта прогноза. С увеличением горизонта прогноза, расчетные входные данные приближаются к оптимальным значениям. Однако большой горизонт прогноза может привести к неприемлемо длительному времени расчета. Например, при большом горизонте прогноза для оптимизации входных данных, решение задачи МПУ, как в линейном, так и в нелинейном случае, может стать затруднительным в расчетном смысле.
К другим попыткам решить проблему большого времени расчета в МПУ относятся способы увеличения скорости оптимизации в рамках МПУ. Один пример решения предложен Пикаром (Pekar) с сотр. в документе US 8504175 (США). В нем функция стоимости, минимизирующая траектории регулируемых переменных, рассчитывается с использованием модели МПУ для относительно короткого горизонта прогноза в будущем. Для нахождения оптимального решения в МПУ используется алгоритм квадратичного программирования (КП), причем этот алгоритм КП реализуется путем использования алгоритма, относящегося к классу решающих программ методом активного множества (AM) с простыми ограничениями на основе проекции градиента, с использованием ньютоновского метода шаговых проекций.
Однако авторы настоящего изобретения увидели потенциальные проблемы таких систем. Один пример: в данной системе автомобиля для достижения адекватного приближения к оптимальному решению может потребоваться большой горизонт прогноза. Для решения задачи МПУ, входные и выходные данные модели системы автомобиля дискретизируются. Длина горизонта прогноза определяется периодом прогноза в будущее и частотой дискретизации. Более высокая частота дискретизации приводит к большей длине горизонта прогноза. Для того чтобы сохранить динамическое изменение модели автомобиля и входных данных модели (например, возмущения), требуется адекватная частота дискретизации. Таким образом, хотя короткий горизонт прогноза с низкой частотой дискретизации может уменьшить количество входных данных, подлежащих оптимизации, но в таком процессе могут быть потеряны разрешающая способность модели и возмущений.
В одном из примеров описанные выше проблемы можно решать способом управления автомобилем, чувствительным к определенному запланированному маршруту, причем этот запланированный маршрут определяют для заданного горизонта прогноза с целью минимизации расхода топлива, с учетом также возмущений по запланированному маршруту и соответственно сжатому общему количеству параметров крутящего момента двигателя на заданном горизонте прогноза. Таким образом, оптимальный запланированный маршрут может быть эффективно определен, если известны возмущения на маршруте.
Один пример: в процессе управления автомобилем параметры автомобиля могут быть оценены интерактивно, исходя из крутящего момента двигателя, одного или нескольких возмущений по маршруту, расхода топлива и ускорения автомобиля. Будущий крутящий момент двигателя может быть выведен для заданного горизонта прогноза, причем будущий крутящий момент двигателя сжимают, чтобы его количество параметров было меньше длины горизонта прогноза. Затем каждый параметр будущего крутящего момента двигателя может быть определен путем минимизации будущего расхода топлива. Уменьшенное количество параметров будущего крутящего момента двигателя может обеспечить более быструю сходимость к оптимальному результату, не снижая разрешающую способность модели. Далее, для оптимального планирования маршрута с включением дискретных событий, требующих разблокирования гидротрансформатора, например, при выключенной подаче топлива и выключенной коробке передач, может быть введено интерактивное моделирование гидротрансформатора.
Технический эффект интерактивной оценки параметров автомобиля заключается в получении в реальном времени интерактивной адаптивной модели автомобиля для учета меняющихся факторов окружающей среды, например, ветра, массы автомобиля, сил трения, износа и т.п. Технический эффект сжатия количества параметров будущего крутящего момента двигателя заключается в достижении повышенной эффективности оптимизации, без снижения разрешающей способности модели и возмущений. Кроме того, это сжатие может значительно снизить потребность в расчетных мощностях и обеспечить возможность применения алгоритма в бортовом вычислителе.
Следует понимать, что вышеприведенное краткое изложение дано для представления в упрощенной форме отдельных идей, которые далее раскрываются в подробном описании. Вышеприведенное не имеет цели представить ключевые или существенные признаки заявляемого объекта, объем которого определяется только формулой изобретения, следующей за подробным описанием. Кроме того, заявляемый объект не ограничен вариантами осуществления, устраняющими какие-то недостатки, отмеченные выше или в какой-либо части данного раскрытия.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
На ФИГ. 1 схематически показаны особенности одного примера системы двигателя автомобиля;
на ФИГ. 2 показан пример конфигурации приводной системы автомобиля;
на ФИГ. 3 показана блок-схема примера модели автомобиля;
на ФИГ. 4 показан пример способа определения оптимального планирования
заданного маршрута;
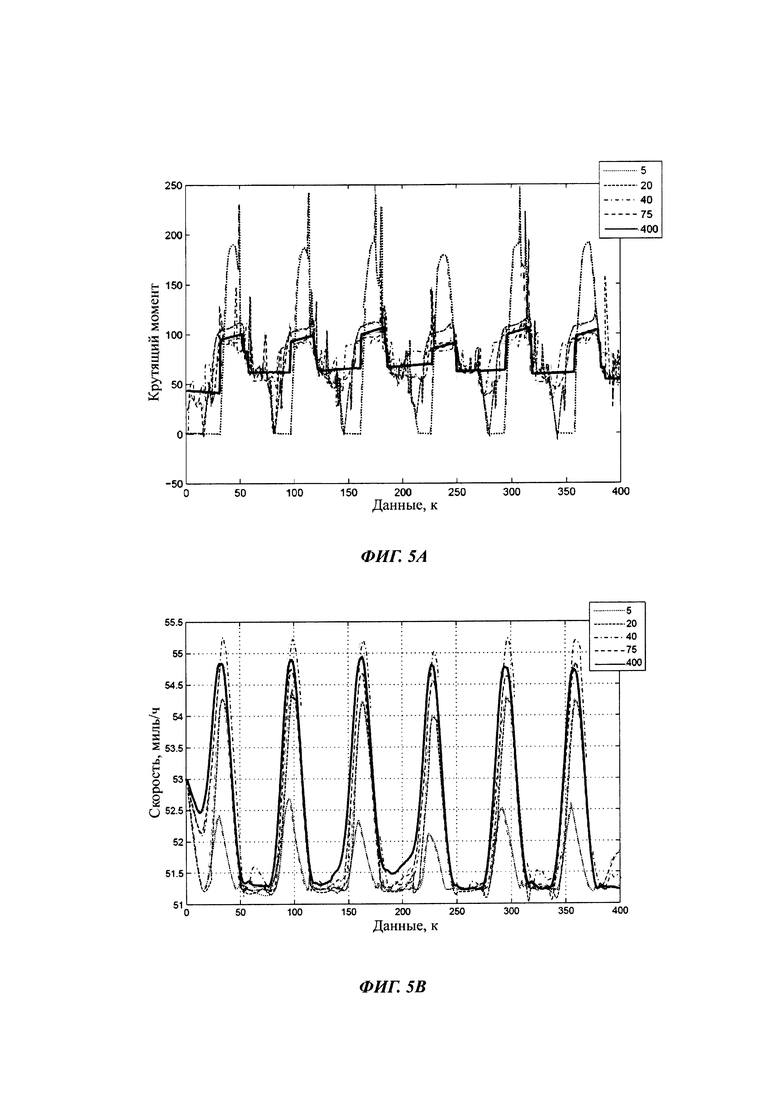
на ФИГ. 5А и 5В представлены результаты решения задачи модельного прогнозного управления, рассчитанные с различными длинами горизонта прогноза.
ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Нижеследующее описание относится к системам и способам определения оптимального профиля крутящего момента для автомобиля при известных возмущениях на маршруте. Решение задачи модельного прогнозного управления выполняют для того, чтобы определить оптимальный крутящий момент двигателя путем минимизации расхода топлива автомобиля на некотором горизонте прогноза. На ФИГ. 1 показан пример системы двигателя автомобиля. На ФИГ. 2 представлен пример конфигурации приводной системы автомобиля. Блок-схема задачи МПУ строится на основе входных и выходных данных примера модели автомобиля, представленных на ФИГ. 3. На ФИГ. 4 показан пример способа определения оптимального крутящего момента двигателя для минимизации расхода топлива. На ФИГ. 5А и 5В показано влияние длины горизонта прогноза на характер сходимости решения задачи МПУ к оптимальному решению.
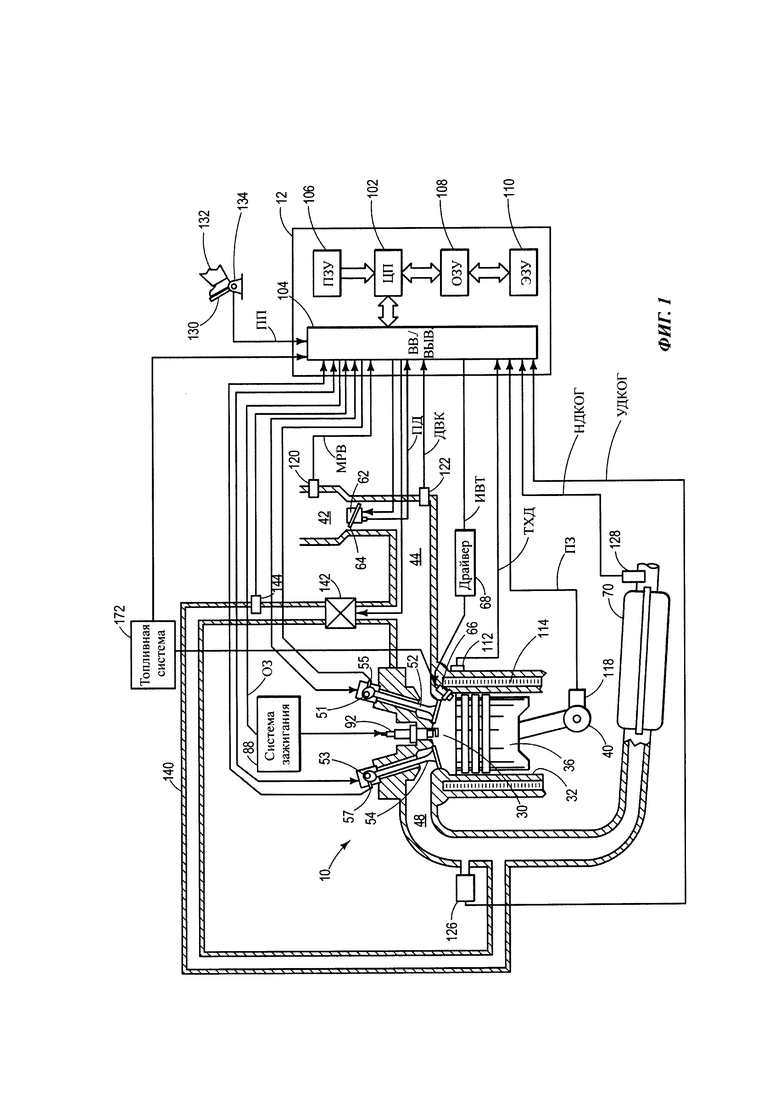
На ФИГ. 1 приведена схема одного цилиндра многоцилиндрового двигателя 10, который может быть включен в силовую установку автомобиля. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей контроллер 12, и посредством команды от водителя 132 автомобиля через устройство 130 ввода. В данном примере устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали для выдачи пропорционального сигнала положения педали (ПП). Камера сгорания (т.е. цилиндр) 30 двигателя 10 может содержать стенки 32 камеры сгорания, и в ней находится поршень 36. Поршень 36 может быть соединен с коленчатым валом 40 так, что возвратно-поступательное движение поршня преобразуется во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен, по меньшей мере, с одним ведущим колесом автомобиля через промежуточную систему трансмиссии. Далее, с коленчатым валом 40 может быть через маховик соединен стартер для запуска двигателя 10.
Камера сгорания 30 может получать впускной воздух, прошедший через впускной канал 42, из впускного коллектора 44, а газообразные продукты сгорания могут выходить через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут выборочно соединяться с камерой сгорания 30 через, соответственно, впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления камера сгорания 30 может содержать два или несколько впускных клапанов и/или два или несколько выпускных клапанов. В данном примере впускной клапан 52 и выпускной клапан 54 могут управляться кулачковым исполнительным механизмом через один или несколько кулачков, и могут использоваться одна или несколько систем переключения профиля кулачка (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ) и/или изменения высоты подъема клапанов (ИВПК), которые могут управляться контроллером 12 для изменения работы клапанов. Положение впускного клапана 52 и выпускного клапана 54 может быть определено датчиками положения 55 и 57, соответственно. В альтернативных вариантах осуществления впускной клапан 52 и/или выпускной клапан 54 могут управляться электрическим клапанным исполнительным механизмом. Например, цилиндр 30 может альтернативно содержать впускной клапан, управляемый электрическим клапанным исполнительным механизмом, и выхлопной клапан, управляемый кулачковым исполнительным механизмом, включающим системы ППК и/или ИФКР.
В некоторых вариантах осуществления каждый цилиндр двигателя 10 может быть выполнен с одним или несколькими топливными инжекторами для подачи топлива в цилиндр. В качестве неограничивающего примера показан цилиндр 30, включающий один топливный инжектор 66, который снабжается топливом из топливной системы 172. Топливный инжектор 66 показан соединенным непосредственно с цилиндром 30 для впрыска топлива непосредственно в цилиндр пропорционально ширине импульса впрыска топлива (ИВТ), поступающего из контроллера 12 через электронный драйвер 68. Таким образом, топливный инжектор 66 обеспечивает так называемый «прямой впрыск» (ниже обозначаемый также "ПВ") топлива в цилиндр 30.
Следует понимать, что в альтернативном варианте осуществления инжектор 66 может быть инжектором подачи топлива во впускной канал выше по потоку относительно цилиндра 30. Следует также понимать, что цилиндр 30 может получать топливо из нескольких инжекторов, например, при наличии нескольких инжекторов впрыска во впускной канал, нескольких инжекторов прямого впрыска или сочетаний тех и других.
На ФИГ. 1 впускной канал 42 может содержать дроссель 62 с дроссельной заслонкой 64. В данном конкретном примере положение дроссельной заслонки 64 может изменяться контроллером 12 с помощью сигнала, выданного на электродвигатель или исполнительный механизм, входящий в состав дросселя 62; такую систему обычно называют электронным управлением дросселем (ЭУД). Таким образом, дроссель 62 может управляться для изменения количества впускного воздуха, подаваемого в камеру сгорания 30, а также в прочие цилиндры двигателя. Положение дроссельной заслонки 64 может сообщаться в контроллер 12 с помощью сигнала положения дросселя (ПД). Воздухозаборник 42 может содержать датчик 120 массового расхода воздуха (МРВ) и датчик 122 давления воздуха в коллекторе (ДВК) для выдачи соответственных сигналов МРВ и ДВК на контроллер 12.
Система 88 зажигания может обеспечивать искру зажигания в камере сгорания 30 с помощью свечи 92 зажигания по сигналу опережения зажигания (ОЗ) от контроллера 12 в выбранных режимах работы. Хотя на ФИГ. изображены элементы искрового зажигания, в некоторых вариантах осуществления камера сгорания 30 или одна или несколько других камер сгорания двигателя 10 могут работать в режиме воспламенения от сжатия, с искрой зажигания или без таковой.
На ФИГ. показан расположенный выше по потоку датчик 126 отработавших газов, соединенный с выпускным каналом 48 выше по потоку относительно устройства 70 снижения токсичности отработавших газов. Расположенный выше по потоку датчик 126 может представлять собой любой подходящий датчик, обеспечивающий индикацию воздушно-топливного отношения в отработавших газах, например линейный широкополосный датчик содержания кислорода или универсальный датчик кислорода в отработавших газах, (УДКОГ), бистабильный узкополосный датчик содержания кислорода в отработавших газах или ДКОГ (датчик кислорода в отработавших газах), нагреваемый датчик кислорода в отработавших газах (НДКОГ), датчик оксидов азота (NOx), углеводородов (НС) или окиси углерода (СО). В одном из вариантов осуществления расположенный выше по потоку датчик 126 отработавших газов представляет собой УДКОГ, выполненный для индикации, например, сигнала напряжения, пропорционального количеству кислорода, присутствующего в отработавших газах. Контроллер 12 использует этот сигнал для того, чтобы определить воздушно-топливное отношение в отработавших газах.
Устройство 70 для снижения токсичности отработавших газов показано расположенным по ходу выпускного канала 48 ниже по потоку относительно датчика 126 отработавших газов. Устройство 70 может представлять собой трехкомпонентный каталитический нейтрализатор (ТКН), выполненный для снижения содержания NOx и для окисления СО и несгоревших углеводородов. В некоторых вариантах осуществления устройство 70 может представлять собой ловушку NOx, различные другие устройства для снижения токсичности отработавших газов или их сочетания.
Второй, расположенный ниже по потоку датчик 128 отработавших газов показан соединенным с выпускным каналом 48 ниже по потоку относительно устройства 70 для снижения токсичности отработавших газов. Расположенный ниже по потоку датчик 128 может представлять собой любой подходящий датчик, выдающий воздушно-топливное отношение в отработавших газах, например, УДКОГ, ДКОГ, НДКОГ и т.п. В одном из вариантов осуществления расположенный ниже по потоку датчик 128 представляет собой НДКОГ, выполненный для выдачи относительного обогащения или обеднения отработавших газов после прохождения через каталитический нейтрализатор. В принципе, этот НДКОГ может выдавать сигнал в виде точки перехода, или сигнала напряжения в той точке, в которой отработавшие газы переходят от бедного состава к богатому.
Далее, в раскрытых вариантах осуществления система рециркуляции отработавших газов (РОГ) может направлять желаемую часть отработавших газов из выпускного канала 48 во впускной канал 42 через канал 140 РОГ. Количество газа РОГ, подаваемого во впускной канал 42, может изменяться контроллером 12 с помощью клапана 142 РОГ. Далее, датчик 144 РОГ может быть расположен в канале РОГ и может замерять один или несколько параметров: давление, температуру и концентрацию отработавших газов. При определенных условиях система РОГ может быть использована для того, чтобы регулировать температуру воздуха и топливной смеси в камере сгорания.
Контроллер 12 показан на ФИГ. 1 в виде микрокомпьютера, включающего: центральный процессор (ЦП) 102, порты 104 ввода/вывода, электронный носитель для исполняемых программ и калибровочных значений, показанный в данном конкретном примере как микросхема постоянного запоминающего устройства (ПЗУ) 106, оперативное запоминающее устройство (ОЗУ) 108, энергонезависимое запоминающее устройство (ЭЗУ) 110 и шину данных. Контроллер 12, в дополнение к сигналам, описанным выше, может получать различные сигналы от подсоединенных к двигателю 10 датчиков, в частности:
замер массового расхода воздуха (МРВ) от датчика 120 МРВ; сигнал температуры хладагента двигателя (ТХД) от датчика 112 температуры, соединенного с рубашкой 114 охлаждения; сигнал профиля зажигания (ПЗ) с датчика 118, работающего на эффекте Холла (или с датчика другого типа) и соединенного с коленчатым валом 40; замер положения дросселя (ПД) от датчика положения дросселя; и замер абсолютного давления воздуха в коллекторе двигателя (ДВК) от датчика 122. Сигнал частоты вращения двигателя (ЧВД, об/мин) может генерироваться контроллером 12 по сигналу ПЗ. Контроллер 12 также использует различные исполнительные механизмы по ФИГ. 1 для регулировки работы двигателя на основе полученных сигналов и команд, записанных в памяти контроллера.
На электронном носителе постоянного запоминающего устройства 106 могут быть записаны машиночитаемые данные, представляющие собой постоянные команды, исполняемые процессором 102 для реализации способов, раскрытых ниже, а также других вариантов, которые предполагаются, но не перечислены явно.
Как описано выше, на ФИГ. 1 показан только один цилиндр многоцилиндрового двигателя, и подобным же образом каждый цилиндр может содержать свой собственный набор впускных/выпускных клапанов, топливный инжектор, свечу зажигания и т.д.
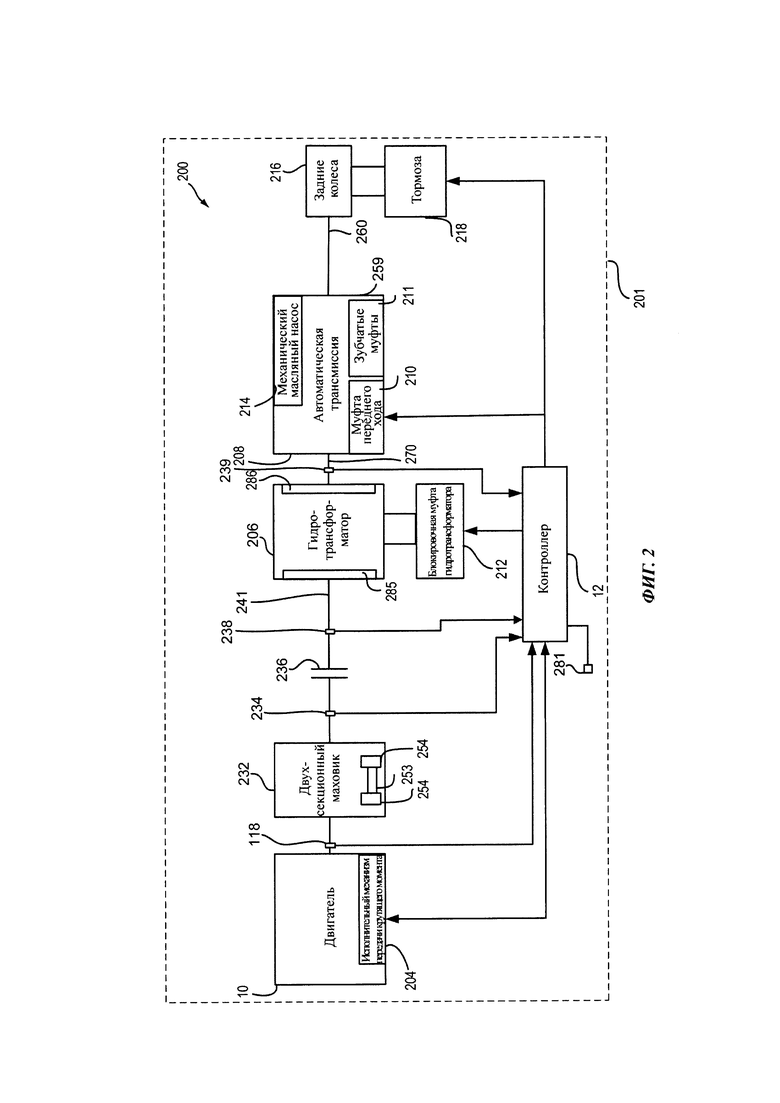
На ФИГ. 2 показана блок-схема автомобиля 201 и приводной системы 200 автомобиля. Приводная система 200 может приводиться от двигателя 10. Двигатель 10 может создавать или регулировать крутящий момент через исполнительный механизм 204 регулировки крутящего момента, например, топливный инжектор, дроссель и т.п.
Выходной крутящий момент двигателя может быть передан на вход двухсекционного маховика (ДСМ) 232. Частота вращения двигателя, а также положение и частота вращения входа двухсекционного маховика могут быть определены с помощью датчика 118 положения двигателя. Двухсекционный маховик 232 может содержать пружины 253 и разделенные массы 254 для демпфирования возмущений крутящего момента приводной системы. Выход двухсекционного маховика 232 показан механически соединенным с входом расцепной муфты 236. Расцепная муфта 236 может приводиться электрически или гидравлически. Датчик 234 положения расположен на стороне расцепной муфты двухсекционного маховика 232, чтобы определять выходное положение и частоту вращения двухсекционного маховика 232.
Дальняя по ходу передачи сторона расцепной муфты 236 механически соединена с крыльчаткой 285 гидротрансформатора 206 посредством вала 241. Датчик 238 положения соединен с валом 241. Гидротрансформатор 206 содержит турбину 286 для передачи крутящего момента входному валу 270 трансмиссии. Входной вал 270 трансмиссии механически соединяет гидротрансформатор 206 с автоматической трансмиссией 208. Гидротрансформатор 206 также содержит шунтирующую блокировочную муфту гидротрансформатора (МГТ) 212. Когда МГТ сцеплена, крутящий момент непосредственно передается от крыльчатки 285 к турбине 286. МГТ электрически управляется контроллером 12. Альтернативно, МГТ может быть сцеплена гидравлически. В одном из примеров гидротрансформатор может считаться элементом трансмиссии. Скорость и положение турбины гидротрансформатора могут быть определены датчиком 239 положения. В некоторых примерах датчики 238 и/или 239 могут быть датчиками крутящего момента или могут представлять собой сочетание датчиков положения и крутящего момента.
Когда блокировочная муфта 212 гидротрансформатора полностью разъединена, гидротрансформатор 206 передает крутящий момент двигателя автоматической трансмиссии 208 от крыльчатки 285 гидротрансформатора к турбине 286 гидротрансформатора гидродинамически, что позволяет усилить крутящий момент. Напротив, когда блокировочная муфта 212 гидротрансформатора полностью сцеплена, выходной крутящий момент двигателя непосредственно передается через муфту гидротрансформатора входному валу (не показан) трансмиссии 208. Альтернативно, блокировочная муфта 212 гидротрансформатора может быть частично сцеплена, что позволяет регулировать величину крутящего момента, непосредственно передаваемого трансмиссии. Контроллер 12 может быть выполнен для регулировки величины крутящего момента, переданного гидротрансформатором 212, посредством регулировки блокировочной муфты гидротрансформатора соответственно различным условиям работы двигателя или по эксплуатационным командам водителя.
Автоматическая трансмиссия 208 содержит зубчатые муфты (например, шестерни 1-6) 211 и муфту 210 переднего хода. Зубчатые муфты 211 и муфта 210 переднего хода могут быть выборочно сцеплены, чтобы привести в движение автомобиль. Крутящий момент на выходе автоматической трансмиссии 208 может, в свою очередь, быть передан на задние колеса 216, чтобы привести в движение автомобиль через выходной вал 260. Конкретно, автоматическая трансмиссия 208 может передавать входной крутящий момент на входном валу 270, с учетом условий движения автомобиля, существовавших до передачи выходного крутящего момента на задние колеса 216.
Далее, зацеплением колесных тормозов 218 может быть приложена сила трения к колесам 216. В одном из примеров колесные тормоза 218 могут быть включены водителем нажатием ногой на педаль тормоза (не показана). В других примерах контроллер 12 или контроллер, связанный с контроллером 12, может включить или вызвать срабатывание колесных тормозов. Таким же образом сила трения, действующая на колеса 216, может быть уменьшена выключением колесных тормозов 218 водителем, снявшим ногу с педали тормоза. Далее, автомобильные тормоза могут приложить силу трения к колесам 216 по команде контроллера 12, отрабатывая часть автоматизированной процедуры остановки двигателя.
Механический масляный насос 214 может быть гидравлически соединен с автоматической трансмиссией 208, чтобы обеспечить гидравлическое давление для зацепления различных муфт, например, муфты 210 переднего хода, зубчатых муфт 211 и/или блокировочной муфты 212 гидротрансформатора. Механический масляный насос 214 может управляться соответственно гидротрансформатору 206 и может приводиться от вращения двигателя или интегрированного стартера-генератора (ИСГ) через входной вал 241, например. Таким образом, гидравлическое давление, создаваемое в механическом масляном насосе 214, может возрастать с увеличением частоты вращения двигателя и/или частоты вращения ИСГ и может падать с уменьшением частоты вращения двигателя и/или частоты вращения ИСГ.
Контроллер 12 может быть выполнен для получения входных данных от двигателя 10, как более подробно показано на ФИГ. 1, и для соответственного управления выходным крутящим моментом двигателя и/или управления работой гидротрансформатора, трансмиссии, муфт и/или тормозов. Один пример: выходной крутящий момент двигателя может управляться посредством регулировки сочетания момента зажигания, ширины ИВТ, момента ИВТ и/или заряда воздуха, посредством управления открытием дросселя и/или моментом открытия и закрытия клапанов, высотой подъема клапанов и наддувом для двигателей с наддувом или турбонаддувом. В случае дизельного двигателя контроллер 12 может управлять выходным крутящим моментом двигателя посредством управления сочетанием ширины ИВТ, момента ИВТ и заряда воздуха. Во всех случаях управление двигателем может выполняться на основе поцилиндрового управления крутящим моментом на выходном валу двигателя. Контроллер 12 может также получать информацию о внешних возмущениях от датчика 281. Информация о внешних возмущениях может содержать уклон дороги по маршруту и условия движения.
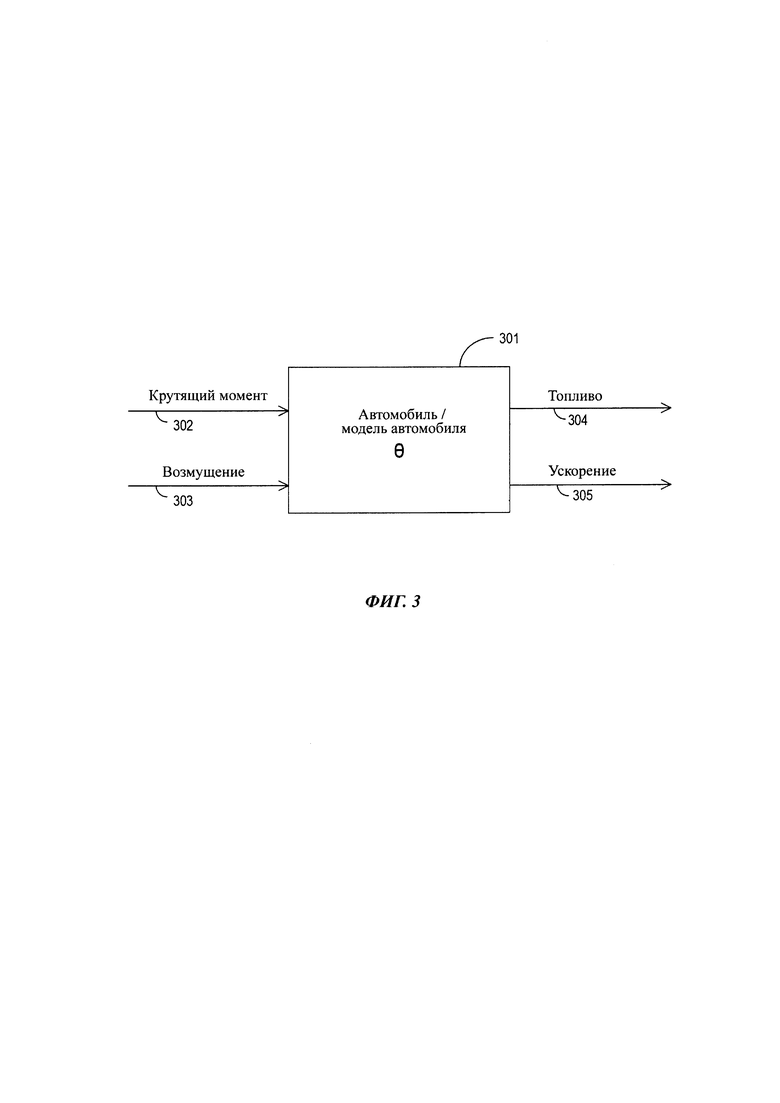
ФИГ. 3-4 относятся к примеру способа определения запланированного маршрута путем минимизации расхода топлива с помощью МПУ при известных возмущениях по маршруту. Решение задачи МПУ строится на основе модели автомобиля, входные и выходные данные которой показаны на ФИГ. 3. На ФИГ. 4 показана блок-схема способа 400 определения оптимального входного крутящего момента двигателя, с целью получения желаемого расхода топлива. Команды для реализации способа 400 и прочих способов, включенных в настоящее описание, могут быть выполнены контроллером на основе записанных в памяти контроллера команд, и в сочетании с сигналами, полученными от датчиков системы двигателя, например, датчиков, описанные выше со ссылкой на ФИГ. 1 и 2. Контроллер может использовать исполнительные механизмы системы двигателя для регулировки работы двигателя, соответственно способам, раскрытым ниже.
На ФИГ. 3 показана блок-схема входных и выходных данных модели 301 автомобиля, рассматриваемой в настоящей работе, где входные данные u(k) - это крутящий момент 302, d(k) - это возмущение 303, а выходные данные y(k) - топливо 304 и ускорение 305 автомобиля. Как пример, возмущение может быть уклоном дороги. Рассмотрим нелинейную модель автомобиля, задаваемую выражением

где а(k) - это ускорение автомобиля,  - это расход топлива, Т(k) - это крутящий момент двигателя и d(k) - это уклон дороги.
- это расход топлива, Т(k) - это крутящий момент двигателя и d(k) - это уклон дороги.  - это нелинейное преобразование входных данных в выходные данные, учитывающее физические свойства автомобиля, включая массу, встречный ветер, трение и т.п.
- это нелинейное преобразование входных данных в выходные данные, учитывающее физические свойства автомобиля, включая массу, встречный ветер, трение и т.п.
Используем линеаризацию выражения (1) с неизвестными параметрами модели автомобиля, задаваемую выражением
где  - это линейные параметры модели автомобиля.
- это линейные параметры модели автомобиля.
Рассмотрим линейную стационарную систему с нижеследующей связью входных и выходных данных

где  - это выходные данные,
- это выходные данные,
 - это параметры модели,
- это параметры модели,
и  это управляющие входные данные, а
это управляющие входные данные, а  - известные возмущения и
- известные возмущения и

Задача МПУ может быть поставлена с целью определить оптимальный крутящий момент двигателя для минимизации расхода топлива  Цель МПУ состоит в том, чтобы определить входные данные по крутящему моменту (k), …, Т(k+r), где r это длина горизонта прогноза в будущее так, что
Цель МПУ состоит в том, чтобы определить входные данные по крутящему моменту (k), …, Т(k+r), где r это длина горизонта прогноза в будущее так, что  минимизируется при наличии уклона дороги d(k), …, d(k+r) и физических свойств автомобиля
минимизируется при наличии уклона дороги d(k), …, d(k+r) и физических свойств автомобиля  Здесь входные и выходные данные указаны с использованием стандартных обозначений; в частности, выходные данные а(k) и
Здесь входные и выходные данные указаны с использованием стандартных обозначений; в частности, выходные данные а(k) и  собирательно обозначаются y(k), входные данные Т(k) это u(k), а известное возмущение d(k) - это уклон дороги.
собирательно обозначаются y(k), входные данные Т(k) это u(k), а известное возмущение d(k) - это уклон дороги.
Вначале рассмотрим реализацию (2) в пространстве состояний
х(k+1)=Ах(k)+B1u(k)+B2d(k),
у(k)=Сх(k),
где

Далее, из решений линейных систем можно записать выходные данные с r шагами в будущее как
y(k+r+1)=CArx(k)+HU(k+r)+H2D(k+r),
где

и

Выходные данные системы на каждом промежуточном шаге от k до k+r могут быть записаны как

где

Наконец, принимая, что желаемые выходные данные системы - это  управляющие воздействия, дающие идеальные выходные данные, - это
управляющие воздействия, дающие идеальные выходные данные, - это  причем u*(k) могут быть рассчитаны решением задачи линейного программирования относительно U*(k+r)
причем u*(k) могут быть рассчитаны решением задачи линейного программирования относительно U*(k+r)

где  и
и  это матрицы ограничений. В отсутствии L и F задача (3) оптимизации может быть решена аналитически с использованием методов Лагранжа. Для других случаев на рынке имеется ряд решающих программ и пакетов, например, MATLAB functions fmincon, Isqlin и т.п.
это матрицы ограничений. В отсутствии L и F задача (3) оптимизации может быть решена аналитически с использованием методов Лагранжа. Для других случаев на рынке имеется ряд решающих программ и пакетов, например, MATLAB functions fmincon, Isqlin и т.п.
Заметим, что, независимо от оптимизационного пакета, использованного для данного горизонта г, количество параметров, подлежащих оптимизации, равно rlu. Если задан большой горизонт прогноза, то время расчета для решения задачи (3) оптимизации может быть очень большим.
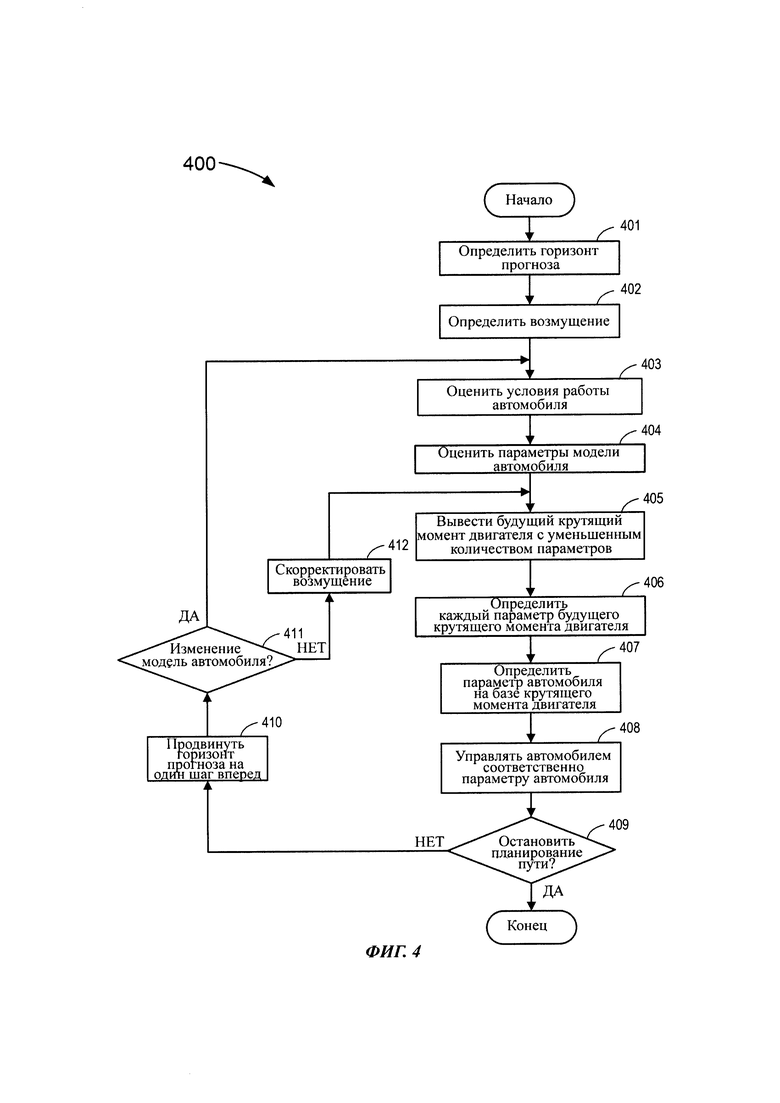
На ФИГ. 4 представлена блок-схема, иллюстрирующая способ 400 определения запланированного маршрута в реальном времени с известным возмущением по маршруту. Способ 400 сокращает время расчета для запланированного маршрута путем сжатия пространства входных данных задачи (3) оптимизации.
На шаге 401 определяется горизонт прогноза для задачи МПУ. Горизонт прогноза определяется, исходя из периода прогноза в будущее и частоты дискретизации на входных и выходных данных модели автомобиля. Например, рассмотрим случай, в котором используется время стробирования 0,5 сек. Если требуемая период прогноза в будущее составляет 80 секунд, требуется горизонт прогноза длиной 160 секунд. Период прогноза и частота дискретизации могут быть определены заранее, исходя из требуемой степени приближения и разрешающей способности оптимизации. Частота дискретизации может также быть ограничена датчиками системы автомобиля. В общем случае, повышение степени приближения требует увеличения горизонта прогноза. Например, на ФИГ. 5А и 5В представлены результирующий крутящий момент двигателя и скорость автомобиля, рассчитанные в задаче МПУ путем минимизации расхода топлива, с ограничениями на минимальную и максимальную скорость автомобиля. Крутящий момент и скорость автомобиля рассчитаны на горизонтах прогноза длиной 5k, 20k, 40k и 75k. С увеличением длины горизонта прогноза, как крутящий момент, так и скорость автомобиля сходятся к оптимальному решению, которое рассчитывается на общей длине данных (400k точек данных).
На шаге 402 может быть определено и записано в энергонезависимую память контроллера возмущение по маршруту. Это возмущение может содержать уклон дороги и условия движения по маршруту. Информация по возмущению может быть определена заранее и получена из базы данных. Возмущение может также быть обновлено на основе информации, полученной в реальном времени от датчика (например, отдатчика 281 на ФИГ. 2).
На шаге 403 оцениваются и записываются в энергонезависимую память контроллера условия работы автомобиля. Условия работы автомобиля могут содержать крутящий момент, расход топлива, и ускорение автомобиля. Условия работы автомобиля могут также содержать, но не ограничительно, состояние блокировочной муфты гидротрансформатора, окружающие температуру и давление, частоту вращения и нагрузку двигателя, скорость автомобиля, положение педали тормоза, положение педали акселератора, температуру двигателя, и т.п.
На шаге 404 оцениваются параметры модели автомобиля на основе ее входных и выходных данных, показанных на ФИГ. 3. Конкретно, параметры модели автомобиля оцениваются, исходя из текущего и прежнего крутящего момента двигателя, возмущения, расхода топлива и ускорения, записанных в энергонезависимую память контроллера.
Если принять, в качестве примера, что входные данные u(k) и выходные данные y(k) могут быть измерены и что возмущение d(k) известно, то параметры модели в могут быть оценены рекурсивно с использованием уравнений обновления

где  - это оценка в, θ, λ∈(0,1] - коэффициент забывания и
- это оценка в, θ, λ∈(0,1] - коэффициент забывания и  обновлено посредством
обновлено посредством

Ковариация может быть инициализирована условием Р(0)=δI, где δ>0.
Заметим, что параметры θ модели могут быть оценены с использованием ряда идентификационных способов, включая пакет наименьших квадратов, который может дать улучшенные оценки при наличии нелинейностей ценой увеличения используемой памяти.
При оптимальном планировании траектории иногда предпочтительно вводить состояние режима замедления с отсечкой топлива (РЗОТ) или выключение силовой передачи (нейтраль). Хотя используемая модель автомобиля справедлива для обоих этих дискретных событий, но при наличии таких режимов гидротрансформатор может быть разблокирован. В этом режиме данная модель автомобиля уже не применима, то есть крутящий момент должен быть умножен на положительное число, меньшее 1, что означает потерю энергии для гидротрансформатора.
Для таких случаев строится расширенная модель автомобиля, охватывающая динамику разблокирования гидротрансформатора. Эта расширенная модель автомобиля может сохранять структуру модели с линейными параметрами и поэтому может быть легко идентифицирована в интерактивном режиме.
Рассмотрим для примера возможно нелинейную структуру модели, представляющей динамику автомобиля с гидротрансформатором в заблокированном состоянии
а(k)=Θ1(T(k-1), δ(k-1)),
где а(k) это ускорение автомобиля, а Θг линейно или содержит линейные параметры. Далее рассмотрим вторую модель
а(k)=Θ2(εT(k-1), δ(k-1)),
которая моделирует динамику автомобиля с максимальным проскальзыванием в гидротрансформаторе, где 0≤ε<1 это минимальная эффективность проскальзывания в гидротрансформаторе. Структура расширенной модели становится взвешенной суммой

где т1 и т2 - это параметры разброса, а n(k) это выходные данные отклика блокировки гидротрансформатора, конкретно

где G(z) - это асимптотически устойчивая передаточная функция идеального фильтра с конечной импульсной характеристикой, ψ - это передаточное число главной передачи, a RPM(k) - это частота вращения двигателя. Заметим, что, поскольку гидротрансформатор заблокирован, V(k)-ψRPM(k)→0, и Θ1 определяет модель ускорения. Альтернативно, n(k) может быть определена как

где G(z) это асимптотически устойчивая передаточная функция идеального фильтра с конечной импульсной характеристикой. v(k)∈{0,1} это импульсный сигнал, так что v(k)=1 для одного временного шага k, когда имеет место дискретное событие, и v(k)=0 для всех остальных случаев.
На шаге 405 строится будущий крутящий момент двигателя на выбранном горизонте прогноза с количеством параметров, меньшим длины горизонта прогноза. Другими словами, пространство входных данных сжимают, чтобы получить повышенную эффективность оптимизации. Сжатое пространство входных данных базируется на коэффициентах ядра, генерируемых банком основных векторов. Банк основных векторов автоматически суммирует оптимальные профили управления, рассчитанные алгоритмом МПУ, для инициализации алгоритма при запуске управления МПУ или при выполнении перезапуска ковариации. Сама по себе, задача МПУ может быть эффективно и надежно решена.
В качестве примера рассмотрим функциональный вид входных данных и(k). Конкретно, пусть

где
для i=1, …, р,
где ρ это разброс ядра, с это центр ядра и для i=1, …, p, αi это коэффициенты ядра. Далее, с использованием (7) крутящий момент с r шагами данных в будущее U*(k+r) может быть аппроксимирован выражением

где
Принимая р<r, результирующее количество параметров, подлежащих оптимизации, уменьшается до р, что дает повышенную эффективность оптимизации.
В качестве другого примера: для сжатия пространства входных данных может быть использована аппроксимация рядом Фурье. Конкретно, и(k) может быть аппроксимирована рядом Фурье, например

где для i=1, …, p, ωi - это заранее выбранные частоты. Затем входная последовательность U*(k+r) аппроксимируется выражением

где

и

причем входная размерность может быть понижена с r до 2р+1.
Коэффициенты αi ядра в вышеприведенных примерах могут быть инициализированы на базе банка основных векторов и также обновлены с обновлением возмущения. Банк включает набор сцепленных векторов коэффициентов α ядра и соответственных векторов измеренного возмущения (уклона дороги) D.
Этот банк непрерывно обновляется кластеризацией в реальном времени мгновенных векторов коэффициентов α(k) ядра и соответственных векторов D(k+r) предварительно просмотренного измеренного возмущения (уклона дороги). Это осуществляется применением алгоритма суммирования, который выводится из алгоритма ближайшего соседа k:
1. Самый первый вектор коэффициентов α(k) ядра и соответственный вектор предварительно просмотренных уклонов дороги D(k)=[d(k+1)…d(k+r)]T дают первый основной вектор банка, т.е. первый кластерный центр:
m=1, [(αm)T(dm)T]T=[α(k)TD(k)T]T.
2. Предположим, что уже образовано m кластерных центров [(αl)T(Di)T]T, i=[1,m], а α(k+р) это вектор коэффициентов ядра, полученный при (k+р). Пусть

i. Если  то векторы α(k+р) и D(k+p) обновят ближайший j-й кластерный центр следующим образом:
то векторы α(k+р) и D(k+p) обновят ближайший j-й кластерный центр следующим образом:
αj:=(1-k)αj+кα(k+р),
Dj:=(1-к)Dj+кD(k+р).
N. Если  то векторы α(k+р) и D(k+р) образуют новый (m+1)-й кластерный центр следующим образом:
то векторы α(k+р) и D(k+р) образуют новый (m+1)-й кластерный центр следующим образом:

Эти кластерные центры могут быть использованы для инициализации вектора коэффициентов ядра для конкретного уклона при запуске алгоритма или после перезапуска ковариации в рекурсивном алгоритме наименьших квадратов (РАНК) с целью обучения модели. Интерполяция выполняется пропорционально обратному расстоянию между текущим вектором предварительно установленного уклона и основными векторами уклона в банке:
где

Постоянные ∈R, σ и к определяют крупность кластеров и скорость обновления кластерных центров.
На шаге 406 каждый параметр будущего крутящего момента двигателя может быть определен применением сжатых входных данных из шага 405 в оптимизации МПУ.
Например, для линейной системы, подставляя (8) в (3), получим расширенную задачу оптимизации

Принимая р<r и подставляя (8) в (3), получаем уменьшение количества подлежащих оптимизации параметров до р, что дает повышенную эффективность оптимизации.
В качестве другого примера возьмем оптимизацию траекторий нелинейных систем во временной области, то есть рассмотрим следующее представление нелинейной системы

где целью оптимизации является система, аналогичная (3), а именно

затем, используя сжатие входных данных, получаем (13) в виде

На шаге 407 параметр автомобиля определяется на базе определенного на шаге 406 первого параметра будущего крутящего момента двигателя. Другими словами, при управлении автомобилем с определенным параметром автомобиля, выходной крутящий момент может быть таким же, как определенный на шаге 406 первый параметр будущего крутящего момента двигателя. Затем автомобиль управляется соответственно параметру автомобиля, определенному на шаге 408. Параметр автомобиля может содержать комбинацию момента зажигания, ширины импульса впрыска топлива, момента импульса впрыска топлива, заряда воздуха, открытия дросселя, момента открытия и закрытия клапана, подъема клапана, а также наддува для двигателей с наддувом или турбонаддувом.
После шага 408 в способе 400 определяют, следует ли остановить планирование пути на шаге 409. Например, планирование пути может быть остановлено, если останавливается автомобиль. В качестве другого примера, планирование пути может быть остановлено водителем автомобиля. Если контроллер определяет, что планирование пути должно быть остановлено, способ 400 заканчивается. В противном случае способ 400 переходит к шагу 410 для продвижения горизонта прогноза на один шаг вперед.
На шаге 410 контроллер определяет, имеется ли какое-то изменение модели автомобиля. К примеру, контроллер определяет, имеется ли изменение внешних факторов окружающей среды, например, массы автомобиля, ветра или сил трения. В качестве другого примера, контроллер определяет, имеется ли изменение в работе гидротрансформатора. Если имеется изменение модели автомобиля, способ 400 переходит к шагу 403, причем параметры модели автомобиля переоцениваются. Если нет изменений факторов окружающей среды, способ 400 переходит к шагу 412 для обновления возмущения по маршруту.
На шаге 412, возмущение по маршруту может быть обновлено на основе входного сигнала от датчика в реальном времени. Затем способ 400 переходит к шагу 405 для обновления банка основных векторов и перерасчета будущего крутящего момента двигателя.
Таким образом, способы, раскрытые в настоящей работе обеспечивают ряд преимуществ перед существующими методиками оптимизации планирования маршрута. Конкретно, сжатие пространства входных данных позволяет потребителю использовать очень большие горизонты прогноза, не принося в жертву возмущение или разрешающую способность модели. Суммирование оптимальных траекторий относительно заданного профиля уклона и используемая модель обеспечивают инициализацию и быструю сходимость алгоритмов оптимизации. Кроме того, адаптация модели, основанной на физических свойствах, позволяет учесть в алгоритмах оптимизации изменение массы автомобиля, масштаб и смещение оценки уклона, ветер, силы сопротивления, вызванные трением, и износ автомобиля.
Способ содержит: управляют параметром автомобиля, чувствительным к определенному запланированному маршруту, причем этот запланированный маршрут определен для заданного горизонта прогноза с целью минимизации расхода топлива, с учетом также возмущения по запланированному маршруту и соответственно сжатому общему количеству параметров крутящего момента двигателя на заданном горизонте прогноза. В первом примере способа общее количество параметров крутящего момента двигателя меньше длины заданного горизонта прогноза. Второй пример способа опционно включает первый пример и также включает шаг, на котором запланированный маршрут определяют также на основе оценки модели автомобиля в процессе управления автомобилем. Третий пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый и второй примеры, и также включает шаг, на котором модель автомобиля оценивают по рекурсивному методу наименьших квадратов, исходя из крутящего момента двигателя, возмущения, расхода топлива и ускорения автомобиля. Четвертый пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый-третий примеры, и также включает шаг, на котором модель автомобиля обновляют на основе ответного выходного сигнала блокировки гидротрансформатора в ходе дискретных событий, когда гидротрансформатор разблокирован. Пятый пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый-четвертый примеры, и также включает шаг, на котором общее количество параметров крутящего момента двигателя сжимают на основе векторных коэффициентов ядра, полученных из банка основных векторов. Шестой пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый-пятый примеры, и также включает шаг, на котором банк основных векторов обновляют в реальном времени на основе текущих векторных коэффициентов ядра и будущего возмущения. Седьмой пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый-шестой примеры, и также включает шаг, на котором векторные коэффициенты ядра инициализируют на базе банка основных векторов до минимизации расхода топлива. Восьмой пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый-седьмой примеры, и также включает шаг, на котором векторные коэффициенты ядра инициализируют на базе банка основных векторов после перезапуска ковариации при оценке параметра модели. Девятый пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый-восьмой примеры, и также включает шаг, на котором запланированный маршрут определяют, исходя из ограничения на крутящий момент двигателя.
Один из способов включает следующие шаги: в процессе управления автомобилем оценивают параметры модели автомобиля, исходя из крутящего момента двигателя, возмущения на маршруте, расхода топлива и ускорения автомобиля; определяют горизонт прогноза; выводят будущий крутящий момент двигателя на этом горизонте прогноза, причем количество параметров будущего крутящего момента двигателя меньше длины горизонта прогноза; определяют каждый параметр будущего крутящего момента двигателя, чтобы обеспечить желаемый расход топлива; управляют автомобилем на основе будущего крутящего момента двигателя; и продвигают горизонт прогноза вперед. В первом примере способа каждый параметр будущего крутящего момента двигателя определяют, исходя из ограничения на будущий крутящий момент двигателя. Второй пример способа опционно включает первый пример и также шаг, на котором будущий крутящий момент двигателя выводят на основе векторных коэффициентов ядра, полученных исходя из возмущения. Третий пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый и второй примеры, и также шаг, на котором векторные коэффициенты ядра создают на базе банка основных векторов, полученных исходя из возмущения. Четвертый пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый-третий примеры, и также шаг, на котором банк основных векторов обновляют на основе текущих векторных коэффициентов ядра и будущего возмущения. Пятый пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый-четвертый примеры, и также шаг, на котором ускорение автомобиля моделируют на базе первой модели с заблокированным гидротрансформатором и второй модели с разблокированным гидротрансформатором. Шестой пример способа опционно включает один, или несколько, или каждый пример из группы, включающей первый-пятый примеры, и также шаг, на котором возмущение представляет собой уклон дороги.
Система автомобиля включает: гидротрансформатор для передачи крутящего момента двигателя на привод ведущих колес; датчик для замера возмущения по маршруту; и контроллер с записанными в энергонезависимую память машиночитаемыми командами для следующих операций: оценки крутящего момента двигателя; оценки расхода топлива; оценки ускорения системы автомобиля; определения горизонта прогноза; уменьшения общего количества параметров крутящего момента двигателя на этом горизонте прогноза на основе обнаруженного возмущения, причем общее количество параметров меньше длины определенного горизонта прогноза; оценки параметров модели автомобиля, исходя из крутящего момента двигателя, оцененного расхода топлива, оцененного ускорения автомобиля и обнаруженного возмущения; определения каждого параметра будущего крутящего момента двигателя с уменьшенным общим количеством параметров путем минимизации будущего расхода топлива; управления автомобилем на базе первого параметра будущего крутящего момента двигателя; и продвижения горизонта прогноза вперед. В первом примере способа, в котором сжатие базируется на векторных коэффициентах ядра, полученных из банка основных векторов, банк основных векторов обновляют соответственно замеренному возмущению. Второй пример способа опционно включает первый пример и также шаг, на котором ускорение автомобиля оценивают на основе оцененного крутящего момента двигателя, и корректируют, когда гидротрансформатор разблокирован.
Заметим, что примеры управления и процедуры оценки, включенные в настоящее раскрытие, могут быть использованы с различными двигателями и/или вариантами систем автомобиля. Способы управления и процедуры, раскрытые в настоящем описании, могут быть записаны как исполняемые команды в энергонезависимую память и могут быть осуществлены системой управления, включающей контроллер в сочетании с различными датчиками, исполнительными механизмами и другими элементами двигателя. Конкретные процедуры, раскрытые в настоящем изобретении, могут представлять собой одну или несколько из любого количества стратегий обработки, например, управляемую событием, управляемую прерыванием, многозадачную, многопоточную, и т.д. По существу, различные проиллюстрированные действия, операции и/или функции могут выполняться в приведенной последовательности, параллельно или, в некоторых случаях, опускаться. Аналогично, порядок обработки не обязательно должен обеспечивать особенности и преимущества приведенных для примера вариантов осуществления, раскрытых в настоящем описании, но дан для ясности иллюстрации и описания. Одно или несколько из проиллюстрированных действий, операций и/или функций могут выполняться повторно, в зависимости от конкретной используемой стратегии. Далее, раскрытые действия, операции и/или функции могут графически представлять собой код, записанный в энергонезависимую память на машиночитаемом носителе в системе управления двигателем, причем раскрытые действия осуществляются путем исполнения команд в системе, включающей различные элементы двигателя в сочетании с электронным контроллером.
Следует понимать, что варианты осуществления и процедуры, раскрытые в настоящем описании, имеют характер примеров и что эти конкретные варианты осуществления не должны толковаться в ограничивающем смысле, так как возможны многочисленные вариации. Так, например, вышеуказанная технология может быть применена к V-образным шестицилиндровым двигателям, I-образным четырехцилиндровым, I-образным шестицилиндровым, V-образным двенадцатицилиндровым, четырехцилиндровым оппозитным и другим типам двигателей. Объект настоящего изобретения включает все новые и неочевидные комбинации и подкомбинации различных систем и исполнений, а также другие признаки, функции и/или свойства, раскрытые в настоящем изобретении.
В частности, в нижеследующей формуле изобретения указаны определенные комбинации и подкомбинации, рассматриваемые как новые и неочевидные. Пункты формулы изобретения могут содержать указания на "некоторый" элемент, или "некоторый первый" элемент, или эквивалентные обозначения. Такие пункты формулы изобретения следует понимать как охватывающие осуществление одного или нескольких упомянутых элементов, не требуя и не исключая наличия двух или большего числа таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены путем изменения представленной формулы изобретения или путем представления новой формулы изобретения в этой или родственной заявке. Такие формулы изобретения, будь то расширенные, суженные, идентичные или отличные по объему от первоначальной формулы изобретения, также рассматриваются как содержащиеся в объекте настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ВЫБОРА ОКТАНОВОГО ЧИСЛА ТОПЛИВА | 2016 |
|
RU2719109C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА В РЕЖИМЕ КРУИЗ-КОНТРОЛЯ | 2017 |
|
RU2748955C2 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| СПОСОБ ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ НА ВЫХОДЕ КОМПРЕССОРА | 2017 |
|
RU2706169C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ (ВАРИАНТЫ) И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2717633C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ПОДАЧИ КРУТЯЩЕГО МОМЕНТА В УСТРОЙСТВО ВАЛА ОТБОРА МОЩНОСТИ | 2017 |
|
RU2671255C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ДИСБАЛАНСА ВОЗДУШНО-ТОПЛИВНОГО ОТНОШЕНИЯ В ЦИЛИНДРАХ ДВИГАТЕЛЯ | 2017 |
|
RU2719372C2 |
| СПОСОБ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) | 2014 |
|
RU2581993C2 |
| СПОСОБ ДЛЯ ПРОГРЕВА ВЫПУСКНОЙ СИСТЕМЫ | 2016 |
|
RU2682688C2 |
| СПОСОБ И МОДУЛЬ ДЛЯ ОПРЕДЕЛЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ОПОРНОГО ЗНАЧЕНИЯ | 2011 |
|
RU2598494C2 |
Предложены способ и система планирования маршрута автомобиля с помощью прогнозного управления на основе адаптивной модели. В одном из примеров способ может включать интерактивную идентификацию модели автомобиля в реальном времени на основе входных и выходных данных модели автомобиля; сжатие пространства входных данных для повышения эффективности оптимизации и оптимизацию планирования маршрута на основе параметра модели автомобиля и известного уклона дороги. 3 н. и 17 з.п. ф-лы, 6 ил.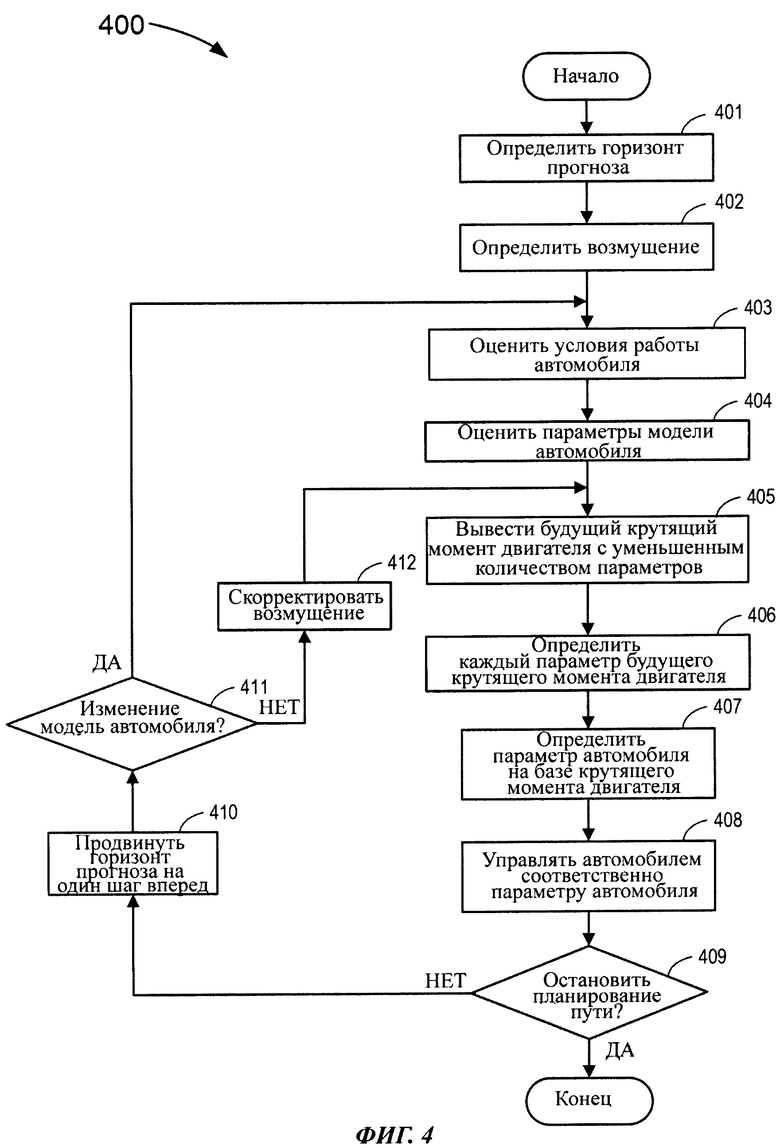
1. Способ управления автомобилем, включающий следующие шаги: регулируют параметр автомобиля соответственно определенному запланированному маршруту, причем этот запланированный маршрут определен для заданного горизонта прогноза с целью снижения расхода топлива и также с учетом возмущений по запланированному маршруту и соответственно сжатому общему количеству параметров крутящего момента двигателя на заданном горизонте прогноза.
2. Способ по п. 1, отличающийся тем, что общее количество параметров крутящего момента двигателя меньше количества точек данных заданного горизонта прогноза.
3. Способ по п. 1, отличающийся тем, что запланированный маршрут определяют также на основе оценки модели автомобиля в процессе управления автомобилем.
4. Способ по п. 3, отличающийся тем, что модель автомобиля оценивают по рекурсивному методу наименьших квадратов, исходя из крутящего момента двигателя, возмущения, расхода топлива и ускорения автомобиля.
5. Способ по п. 3, отличающийся тем, что модель автомобиля корректируют на основе ответного выходного сигнала блокировки гидротрансформатора в ходе дискретных событий, когда гидротрансформатор разблокирован.
6. Способ по п. 1, отличающийся тем, что общее количество параметров крутящего момента двигателя сжимают на основе векторных коэффициентов ядра, полученных из банка основных векторов.
7. Способ по п. 6, отличающийся тем, что банк основных векторов обновляют в реальном времени на основе текущих векторных коэффициентов ядра и будущего возмущения.
8. Способ по п. 6, отличающийся тем, что векторные коэффициенты ядра инициализируют на базе банка основных векторов до минимизации расхода топлива.
9. Способ по п. 6, отличающийся тем, что векторные коэффициенты ядра инициализируют на базе банка основных векторов после перезапуска ковариации при оценке параметра модели.
10. Способ по п. 1, отличающийся тем, что запланированный маршрут определяют исходя из ограничения на крутящий момент двигателя.
11. Способ управления автомобилем, включающий следующие шаги:
в процессе управления автомобилем оценивают параметры модели автомобиля исходя из крутящего момента двигателя, возмущения на маршруте, расхода топлива и ускорения автомобиля;
определяют горизонт прогноза;
выводят будущий крутящий момент двигателя на этом горизонте прогноза, причем количество параметров будущего крутящего момента двигателя меньше количества точек данных горизонта прогноза;
определяют каждый параметр будущего крутящего момента двигателя, чтобы обеспечить желаемый расход топлива;
управляют автомобилем на основе будущего крутящего момента двигателя; и продвигают горизонт прогноза вперед.
12. Способ по п. 11, отличающийся тем, что каждый параметр будущего крутящего момента двигателя определяют исходя из ограничения на будущий крутящий момент двигателя.
13. Способ по п. 11, отличающийся тем, что будущий крутящий момент двигателя выводят на основе векторных коэффициентов ядра, полученных исходя из возмущения.
14. Способ по п. 13, отличающийся тем, что векторные коэффициенты ядра создают на базе банка основных векторов, полученных исходя из возмущения.
15. Способ по п. 14, отличающийся тем, что банк основных векторов обновляют на основе текущих векторных коэффициентов ядра и будущего возмущения.
16. Способ по п. 15, отличающийся тем, что ускорение автомобиля моделируют на базе первой модели с заблокированным гидротрансформатором и второй модели с разблокированным гидротрансформатором.
17. Способ по п. 11, отличающийся тем, что возмущение представляет собой уклон дороги.
18. Система автомобиля, содержащая:
гидротрансформатор для передачи крутящего момента двигателя на привод ведущих колес;
датчик для обнаружения возмущения по маршруту; и
контроллер, сконфигурированный с записанными в энергонезависимую память машиночитаемыми командами, для:
оценки крутящего момента двигателя;
оценки расхода топлива;
оценки ускорения системы автомобиля;
определения горизонта прогноза;
уменьшения общего количества параметров крутящего момента двигателя на этом горизонте прогноза на основе обнаруженного возмущения, причем общее количество параметров меньше количества точек данных определенного таким образом горизонта прогноза;
оценки параметров модели автомобиля исходя из крутящего момента двигателя, оцененного расхода топлива, оцененного ускорения системы автомобиля и обнаруженного возмущения;
определения каждого параметра будущего крутящего момента двигателя с уменьшенным общим количеством параметров путем минимизации будущего расхода топлива;
управления системой автомобиля на базе первого параметра будущего крутящего момента двигателя; и
продвижения горизонта прогноза вперед.
19. Система по п. 18, отличающийся тем, что сжатие основано на векторных коэффициентах ядра, полученных из банка основных векторов, и есть возможность обновления банка основных векторов в ответ на обнаруженное возмущение.
20. Система по п. 18, отличающийся тем, что выполнена с возможностью оценки ускорения системы автомобиля на основе оцененного крутящего момента двигателя и корректировки ускорения системы автомобиля, когда гидротрансформатор разблокирован.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| ДВУХКАМЕРНЫЙ ХОЛОДИЛЬНЫЙ АППАРАТ | 2005 |
|
RU2371645C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Экспрессный способ установления фальсификации молока разбавлением его водой по сигналам массива пьезосенсоров | 2016 |
|
RU2620343C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

