ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0001] Настоящее раскрытие, в целом, относится к механизму управления движением и, более конкретно, к системам и способам для торможения или запуска тележки аттракциона для катания.
[0002] Этот раздел предназначен для представления читателю различных аспектов области техники, которые могут быть связаны с различными аспектами настоящих способов, которые описаны и/или заявлены ниже. Это обсуждение, предполагается, быть полезным в обеспечении читателя справочной информацией для лучшего понимания различных аспектов настоящего раскрытия. Соответственно, должно быть понятно, что эти положения должны рассматриваться с такой точки зрения, а не как признание предшествующего уровня техники.
[0003] Существуют различные применения, которые используют механизмы для ускорения и остановки транспортного средства, перевозящего пассажиров. Например, поезда, американские горки, и тому подобное, могут использовать один или несколько линейных асинхронных двигателей (LIMs) или линейных синхронных двигателей (LSMs) для ускорения тележки или вагона аттракциона для катания вдоль трека и приведения тележки или вагона аттракциона для катания в состояние покоя в желаемом месте. Линейные асинхронные двигатели и линейные синхронные двигатели являются, по существу, электрическими двигателями, которые были развернуты, с роторами, лежащими в линейной конфигурации. Линейные асинхронные двигатели и линейные синхронные двигатели создают силу для движения тележки или вагона аттракциона для катания путем создания линейного магнитного поля для притяжения или отталкивания кондукторов или магнитов в поле. Линейные асинхронные двигатели и линейные синхронные двигатели обычно включают в себя ротор, закрепленный к треку, и статор, закрепленный к движущейся тележке или вагону аттракциона для катания, или наоборот. В линейных асинхронных двигателях, ротор может включать в себя обмотки линейной катушки, заключенные в ферритовый сердечник, к которым может быть подано трехфазное питание переменным электрическим током. Ротор может быть закрыт панелью. Статор может включать в себя кондуктор, например, сталеалюминиевую панель, также называемую реактивной плитой. С другой стороны, в линейных синхронных двигателях, ротор может быть одним или несколькими постоянными магнитами, а статор может быть катушкой, оба из которых могут быть покрыты отдельными панелями. В любом случае, когда переменный ток подается на катушку, может быть получено магнитное поле. В линейных асинхронных двигателях реактивная плита может генерировать свое собственное магнитное поле при помещении в магнитном поле ротора из-за наведенных вихревых токов, и два магнитных поля могут отталкиваться или притягиваться, таким образом, заставляя тележку ускоряться или замедляться. Точно так же, в линейных синхронных двигателях, когда находящаяся под током катушка статора проходит постоянные магниты в роторе, электрически управляемые магнитные поля могут отталкивать или притягивать, заставляя, тем самым, тележку ускоряться или замедляться.
КРАТКОЕ ОПИСАНИЕ
[0004] Некоторые варианты осуществления, соизмеримые по масштабам с первоначально заявленным объектом изобретения, приведены ниже. Эти варианты осуществления не предназначены для ограничения объема раскрытия, а, скорее, эти варианты осуществления предназначены только для обеспечения краткого описание некоторых раскрытых вариантов осуществления. В самом деле, настоящее изобретение может включать в себя различные формы, которые могут быть такими же, или отличаться от вариантов осуществления, изложенных ниже.
[0005] В соответствии с одним аспектом настоящего раскрытия, система включает в себя линейный асинхронный двигатель (LIM), установленный в изогнутом участке трека, тележку аттракциона для катания, расположенную на треке, одну или несколько реактивных плит, присоединенных к стороне тележки аттракциона для катания, обращенной к треку, посредством множества исполнительных механизмов, один или несколько датчиков, выполненных с возможностью осуществления контроля воздушного зазора между одной или несколькими реактивными плитами и линейным асинхронным двигателем, и процессор, выполненный с возможностью определения, какой из множества исполнительных механизмов приводить в действие, и требуемый рабочий параметр каждого из множества исполнительных механизмов на основании данных, полученных от одного или более датчиков, для поддержания воздушного зазора на требуемом уровне на всем протяжении прохождения кривой тележкой аттракциона для катания.
[0006] В соответствии с другим аспектом настоящего раскрытия, способ включает в себя получение данных, связанных с тележкой для увеселительного аттракциона для катания, расположенной на треке, и участком сложной кривой трека, посредством одного или нескольких датчиков, определяющих, по меньшей мере, одну выбранную реактивную плиту, посредством процессора, из множества реактивных плит для приведения в действие на основе данных, использующих систему с замкнутым контуром, для поддержания достаточного воздушного зазора между множеством реактивных плит и линейным асинхронным двигателем (LIM), установленным на треке, и приведения в действие исполнительных механизмов, соединяющих, по меньшей мере, одну выбранную реактивную плиту в нижней части тележки аттракциона для катания, как определенную на всем протяжении сложной кривой, для изгибания реактивных плит для поддержания достаточного воздушного зазора.
[0007] В соответствии с другим аспектом настоящего раскрытия, система включает в себя линейный синхронный двигатель (LSM), включающий в себя ротор, содержащий постоянные магниты с чередующимися полюсами, установленные на позвонковых панелях, сочлененных гибкой подложкой. Ротор установлен на двух сторонах участка сложной кривой трека американских горок, а статор может включать в себя обмотки линейной катушки, прикрепленные к нижней части тележки аттракциона для катания, расположенной на треке. Тележка аттракциона для катания включает в себя источник питания и процессор, выполненный с возможностью определения, сколько энергии подавать обмоткам линейной катушки, и когда подавать энергию для поддержания достаточных воздушных зазоров между статором и позвонковыми панелями ротора, и для побуждения источника питания к подаче энергии, которая установлена на всем протяжении сложной кривой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Эти и другие признаки, аспекты и преимущества настоящего раскрытия станут лучше понятными при прочтении последующего подробного описания со ссылкой к прилагаемым чертежам, на которых идентичные символы представляют одинаковые части по всем чертежам, на которых:
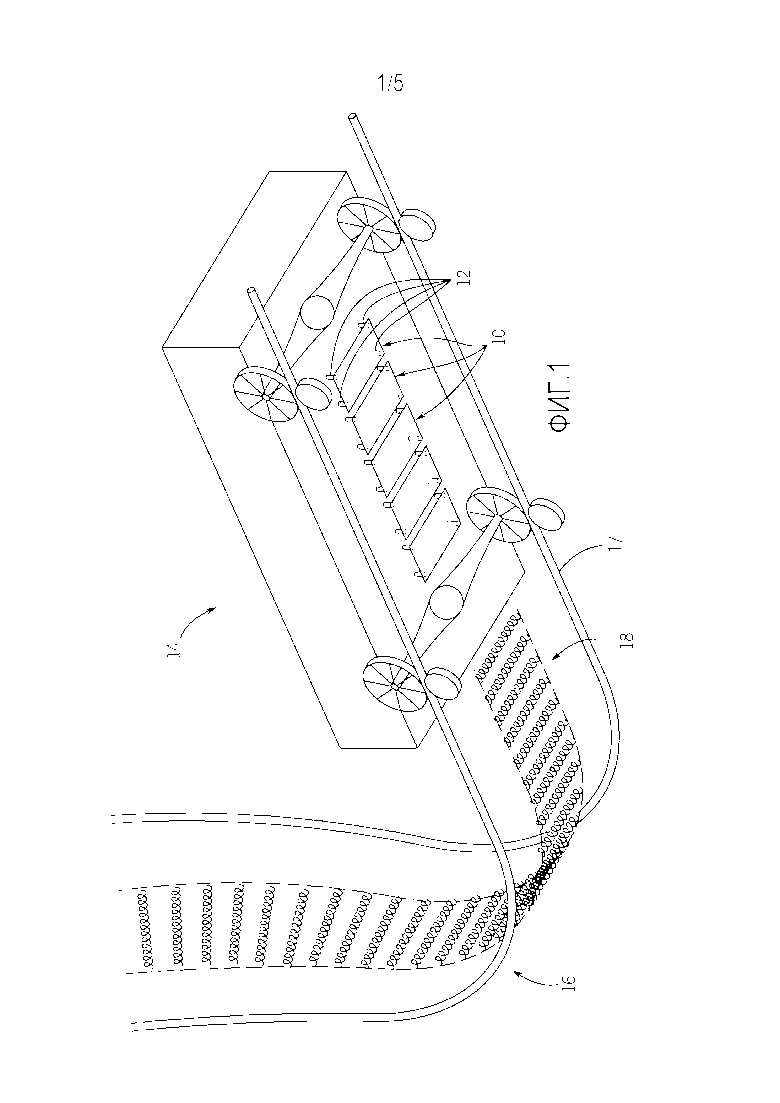
[0009] Фиг.1 иллюстрирует схематичный вид в перспективе линейного асинхронного двигателя (LIM), включающего в себя реактивные плиты с исполнительными механизмами, прикрепленные к тележке аттракциона для катания, который используется на участке сложной кривой американских горок в соответствии с вариантом осуществления;
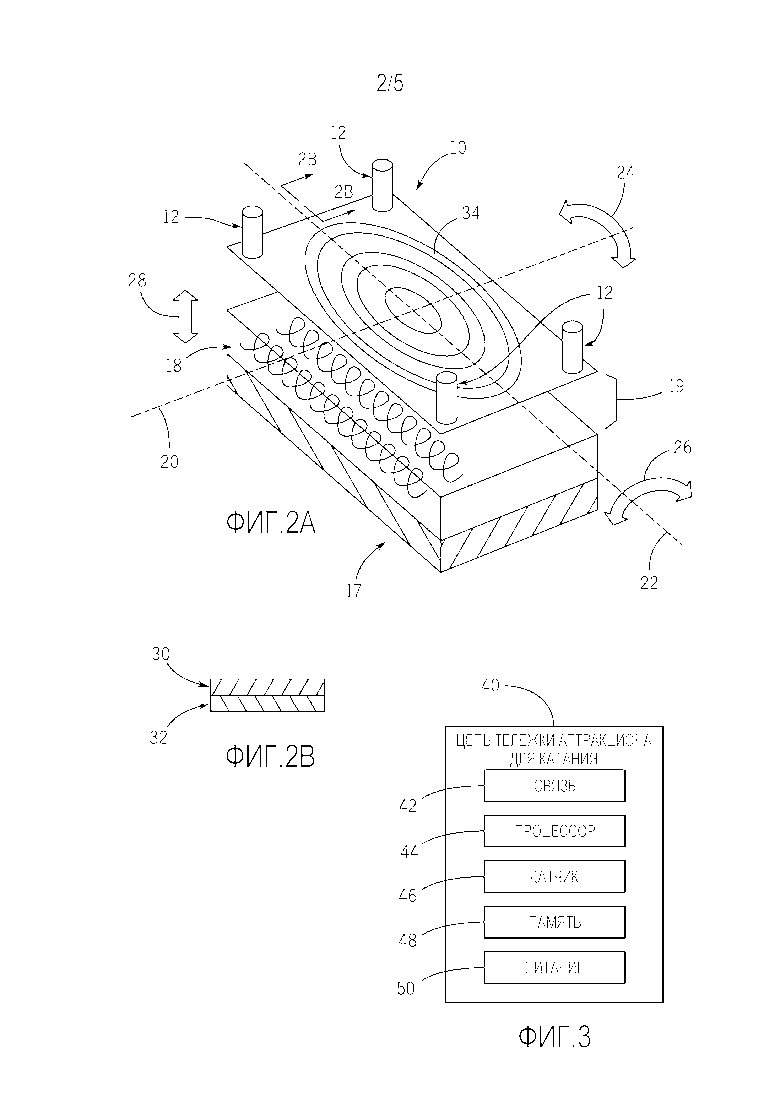
[0010] Фиг.2A иллюстрирует реактивную плиту, включающую в себя исполнительные механизмы по фиг.1, а фиг.2В представляет собой вид сбоку реактивной плиты в соответствии с вариантом осуществления;
[0011] Фиг.3 представляет собой блок-схему цепи тележки аттракциона для катания в соответствии с вариантом осуществления;
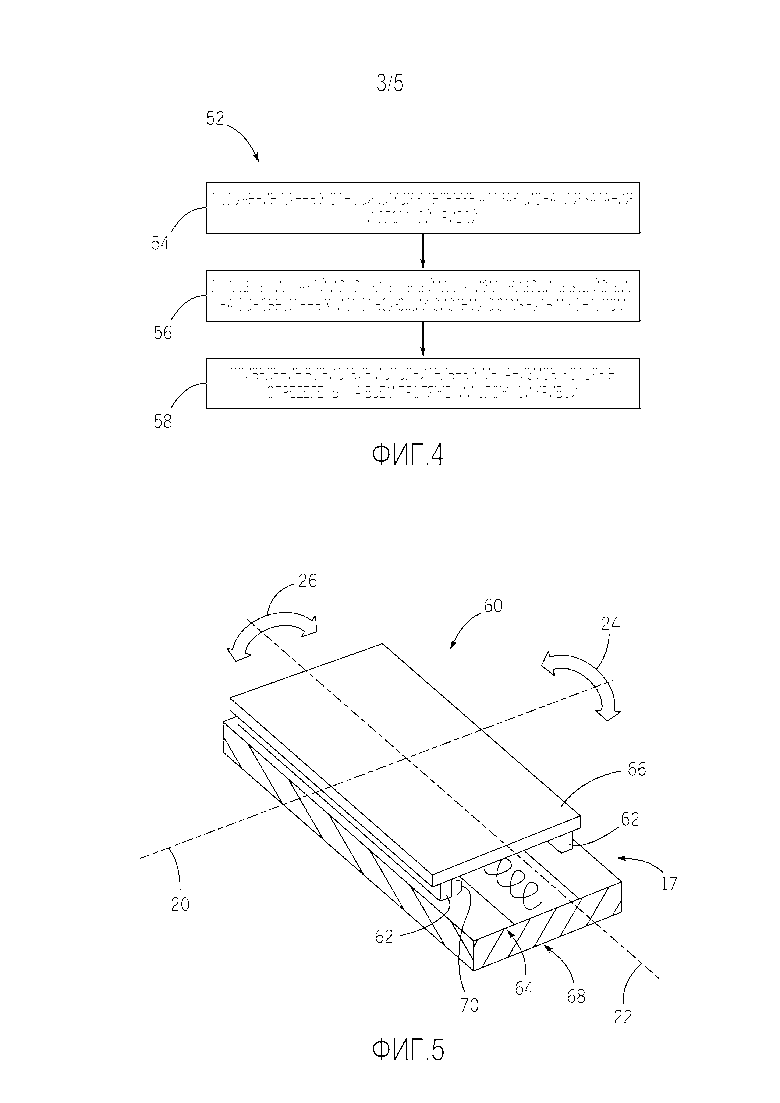
[0012] Фиг.4 представляет собой схему последовательности операций процесса, применимого для поддержания воздушного зазора в линейном асинхронном двигателе за счет использования исполнительных механизмов, прикрепленных к реактивным плитам, в соответствии с вариантом осуществления;
[0013] Фиг.5 иллюстрирует скользящие подшипники, прикрепленные к реактивным плитам тележки аттракциона для катания, для поддержания воздушного зазора между реактивными плитами и асинхронным двигателем на треке на сложной кривой, в соответствии с вариантом осуществления;
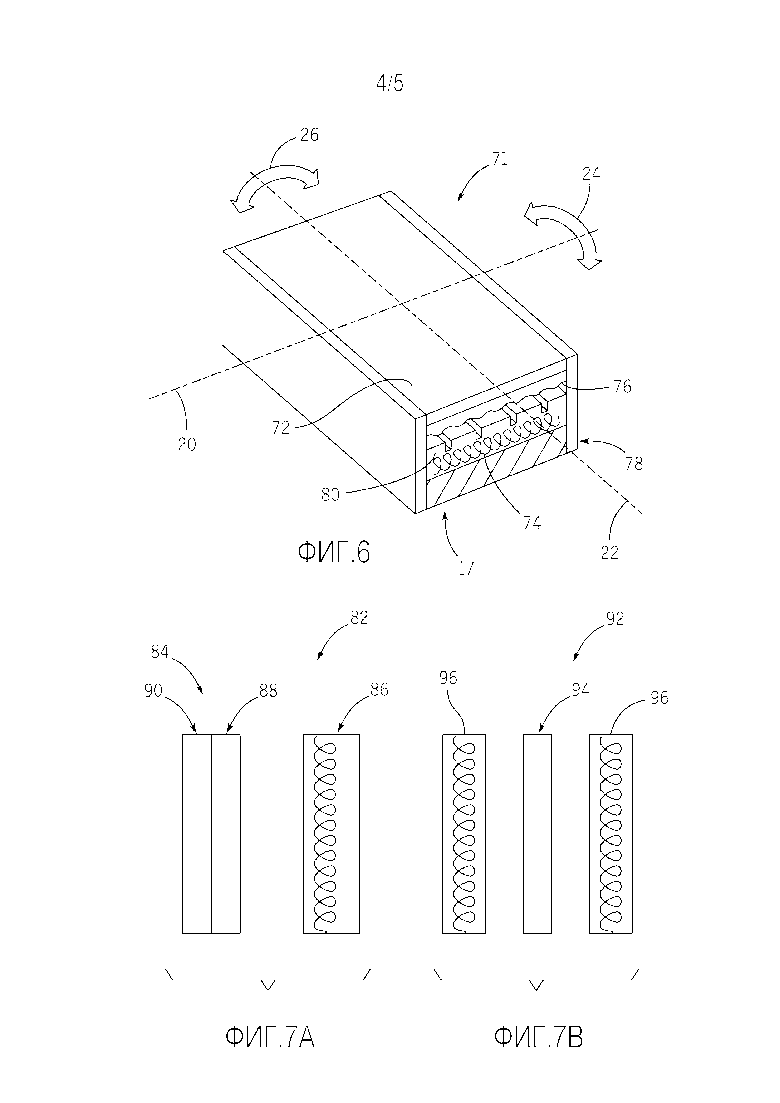
[0014] Фиг.6 иллюстрирует гидравлическую жидкость, расположенную между реактивными плитами, прикрепленными к тележке аттракциона для катания, и асинхронным двигателем на треке для поддержания зазора на сложной кривой, в соответствии с вариантом осуществления;
[0015] Фиг.7А иллюстрирует односторонний линейный асинхронный двигатель, а фиг.7В иллюстрирует двусторонний линейный асинхронный двигатель в соответствии с вариантом осуществления;
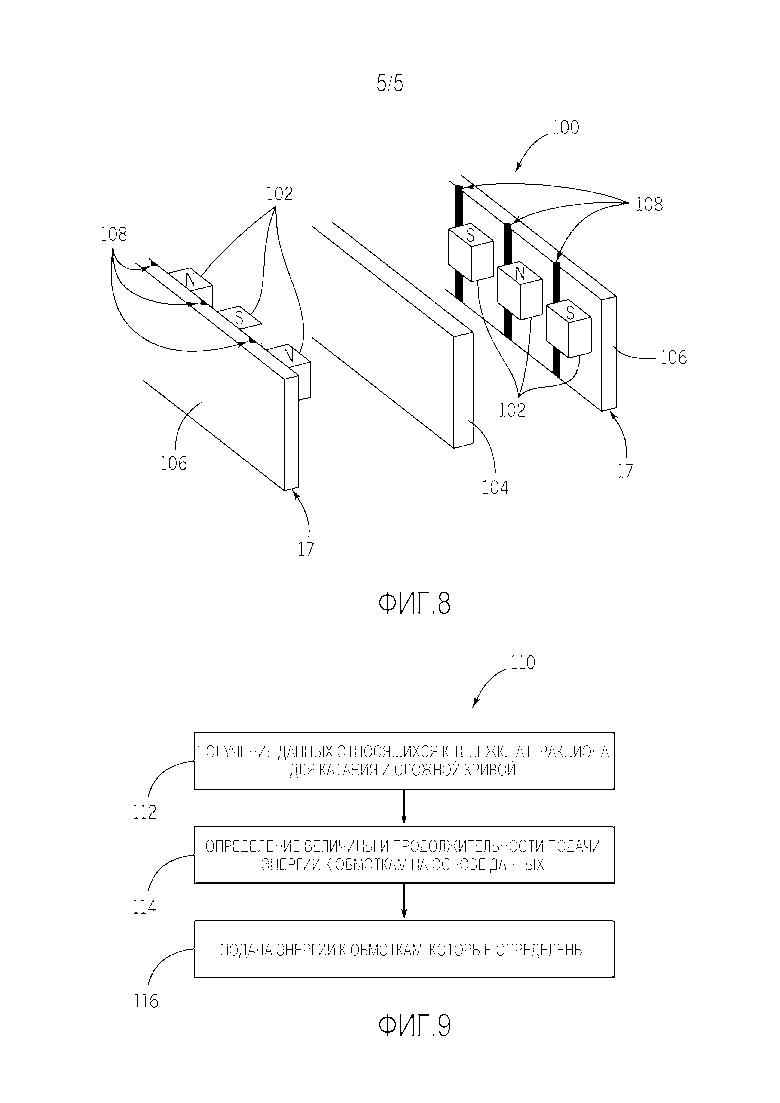
[0016] Фиг.8 иллюстрирует линейный синхронный двигатель (LSM) с постоянными магнитами, установленными на панелях ротора и линейную катушку статора для поддержания воздушного зазора на сложной кривой, в соответствии с вариантом осуществления; а также
[0017] Фиг.9 представляет собой схему последовательности операций процесса, применимого для поддержания воздушного зазора в линейном синхронном двигателе за счет подачи энергии к обмоткам линейных катушек в соответствии с вариантом осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0018] Механизмы, которые используются для запуска и торможения тележек или вагонов аттракциона для катания часто используются в системах наземного транспорта, таких как поезда, и в парках увеселительных аттракционов для катания, таких как американские горки. Механизмы могут включать в себя линейные асинхронные двигатели (LIMs) и/или линейные синхронные двигатели (LSMs). Линейные асинхронные двигатели и линейные синхронные двигатели могут включать в себя два элемента, статор и ротор, которые разнесены воздушным зазором. Желательным является удержание воздушного зазора ограниченным (например, в пределах определенного порогового расстояния) для генерирования вектора силы тяги и для повышения эффективности механизмов. Как правило, применения, которые используют линейные асинхронные двигатели или линейные синхронные двигатели, располагают роторы на прямолинейном или плавно закругленном треке. Это часто связано с ключевым компонентом при создании эффективного линейного асинхронного двигателя или линейного синхронного двигателя, который поддерживает воздушный зазор между статором и ротором. В настоящее время признано, что, когда закругления трека становятся более сложными, сохранение воздушного зазора становится более трудным.
[0019] Как было отмечено выше, линейные асинхронные двигатели и линейные синхронные двигатели, используемые в этих применениях, как правило, устанавливают ротор на прямом или плавно закругленном участке трека. По этой причине, в линейных асинхронных двигателях, статор может включать в себя панели (например, алюминиевые панели), называемые реактивными панелями в данном описании, которые обычно разбиваются на плоские сочлененные сегментированные панели так, что они могут взаимодействовать с противостоящим элементом и поддерживать воздушный зазор в продолжение прямого или плавно закругленного участка трека для запуска или остановки тележки или вагона аттракциона для катания. Воздушный зазор между статором и ротором, является прямо пропорциональным эффективности линейного асинхронного двигателя или линейного синхронного двигателя. Таким образом, если воздушный зазор не поддерживается, то электрическое проскальзывание может иметь место, что влияет на эффективность работы линейного асинхронного двигателя или линейного синхронного двигателя. В свою очередь, линейный асинхронный двигатель или линейный синхронный двигатель может использовать больше энергии, чем это необходимо, для приведения в движение или замедления транспортного средства. Тем не менее, управление воздушным зазором может быть затруднено по ряду причин, включающих в себя погрешности в треке, мягкости колес, и силе магнитного притяжения или отталкивания между статором и ротором, среди прочих.
[0020] Эти трудности могут быть увеличены на участке сложной кривой трека, таком как штопор, где статор и ротор вынуждены следовать радиусу, который является восходящим, нисходящим, или постоянным. В дополнение к перечисленным выше трудностям, тележка или вагон аттракциона для катания может иметь колебание относительно поперечной оси и колебание относительно продольной оси на всем протяжении сложной кривой, что может увеличить трудность в поддержании почти постоянного (например, ниже порогового значения) воздушного зазора. В результате, эти механизмы не используются, как правило, на сложных кривых. Тем не менее, в настоящее время признано, что существует необходимость улучшения управления движением (например, торможением или запуском) механизмов, особенно тех, которые могут быть использованы на участках сложной кривой трека.
[0021] Таким образом, описанные в настоящее время варианты осуществления направлены к системам и способам для управления движением механизма для управления воздушным зазором между ротором и реактивными плитами. В частности, описанные способы могут быть особенно предпочтительными, так как они могут преодолеть трудности, перечисленные выше, в управлении воздушным зазором на участках сложной кривой трека. Соответственно, настоящие варианты осуществления позволяют тележке или вагону аттракциона для катания быть дополнительно ускоренным или замедленным эффективно в продолжение этих участков трека вместо того, чтобы полагаться исключительно только на кинетическую энергию для прохождения сложной кривой.
[0022] Существуют многочисленные варианты осуществления, которые могут достичь этих результатов в соответствии с настоящим раскрытием. В одном варианте осуществления исполнительные механизмы могут быть прикреплены к четырем углам сочлененных реактивных плит, прикрепленных к статору на тележке или вагоне аттракциона для катания, а также исполнительные механизмы могут трансформировать или изгибать сочлененные реактивные плиты непрерывно, чтобы соответствовать форме панелей ротора на треке, когда тележка или вагон аттракциона для катания колеблется относительно поперечной оси или колеблется относительно продольной оси на всем протяжении спирали сложной кривой, поддерживая, тем самым, воздушный зазор. В другом варианте осуществления физический подшипник может быть помещен между ротором и статором, который устанавливает воздушный зазор, и удерживает зазор почти постоянным, когда тележка или вагон аттракциона для катания колеблется относительно поперечной оси или колеблется относительно продольной оси на всем протяжении сложной кривой. В другом варианте осуществления гидравлическая жидкость может быть введена между панелями ротора и реактивными плитами статора для обеспечения гидродинамического подшипника для управления зазором между этими двумя элементами. В еще одном варианте осуществления постоянные магниты с чередующимися полюсами могут быть прикреплены к индивидуальным позвонкам сочлененного позвонкового ротора, а статор может включать в себя обмотки катушки. Гибкая подложка может быть расположена между позвонками, чтобы позволить позвонкам изгибаться вокруг сложной кривизны трека с тем, чтобы сделать возможным поддержание воздушного зазора.
[0023] Фиг.1 иллюстрирует линейный асинхронный двигатель, включающий в себя реактивные плиты 10 с исполнительными механизмами 12, прикрепленными к тележке 14 аттракциона для катания, который используется на участке 16 сложной кривой трека 17 американских горок. Как изображено в варианте осуществления, статор линейного асинхронного двигателя может включать в себя реактивные плиты 10, прикрепленные к нижней части тележки 14 аттракциона для катания, а ротор линейного асинхронного двигателя может включать в себя линейные индукционные катушки 18, встроенные в трек 17 американских горок. Более конкретно, линейные катушки 18 могут быть размещены в пазах ферритового сердечника, установленного на протяжении одного или нескольких участков трека 17, таких как сложная кривая 16. Реактивные плиты 10 могут быть сегментированными и сочлененными алюминиевыми панелями или любым проводящим материалом. Сочлененные реактивные плиты 10 могут относиться к двум или более реактивным плитам 10, соединенным гибким соединением. Это может позволить реактивным плитам 10 изгибаться и следовать ротору вокруг спирали сложной кривой. Кроме того, реактивные плиты 10 могут быть одинаковой длины как панели (например, линейная катушка) ротора для поддержания магнитного поля, генерируемого посредством линейной катушки, сохраняя, тем самым, эффективность линейного асинхронного двигателя. То есть реактивная плита, которая имеет тот же размер, что и линейная катушка ротора, может быть способна производить вихревые токи, пропорциональные магнитному полю, генерируемому линейной катушкой ротора, таким образом, эффективность может быть сохранена. Таким образом, если линейные катушки 18 ротора имеют длину один метр, реактивные плиты 10 могут каждая иметь длину один метр, и так далее.
[0024] Поскольку реактивные плиты 10 статора закреплены на тележке 14 аттракциона для катания, реактивные плиты 10 перемещаются непрерывно с тележкой 14 аттракциона для катания при ее прохождении сложной кривой 16 на треке 17. Кроме того, как это обычно бывает в парке развлечений и аттракционов, одна или несколько тележек 14 аттракциона для катания могут быть прикреплены друг к другу для образования последовательности тележек аттракциона для катания. Таким образом, каждая тележка 14 аттракциона для катания из последовательности тележек аттракциона для катания может катиться по всей сложной кривой 16 под слегка разными углами. По этой причине, реактивные плиты 10 на каждой тележке 14 аттракциона для катания в последовательности могут испытать различное колебание относительно поперечной оси и колебание относительно продольной оси, так как тележка 14 аттракциона для катания перемещается по спирали или окружности на сложной кривой 16. Для того чтобы поддерживать воздушный зазор как можно близким между ротором и статором линейного асинхронного двигателя каждой тележки 14 аттракциона для катания на всем протяжении поднимающейся, спускающейся, или с постоянным радиусом сложной кривой 16, может быть полезным изгибать статор и/или ротор почти по такой же дуге. Таким образом, исполнительные механизмы 12, которые могут быть прикреплены к каждому из четырех углов каждой реактивной плиты 10 и тележке 14 аттракциона для катания, могут сделать возможным изменение формы соответствующей реактивной плиты 10 до желаемой дуги в разных частях сложной кривой 16, поддерживая, тем самым, воздушный зазор на практически постоянном расстоянии. Например, средний воздушный зазор на одном метре линейного асинхронного двигателя (например, ротора и статора) может составлять один сантиметр, при этом воздушный зазор составляет два миллиметра на самой верхней части, и от семи до одиннадцати миллиметров на внешних границах. Таким образом, в некоторых вариантах осуществления, желательным является поддержание воздушного зазора на среднем расстоянии, или в пределах диапазона, основанного на длине статора и ротора линейного асинхронного двигателя. Достижение почти постоянного или соответствующего воздушного зазора по всей сложной кривой 16, может позволить линейному асинхронному двигателю генерировать соответствующий поперечный вектор силы тяги, используя энергию эффективно.
[0025] Более подробная иллюстрация реактивной плиты 10 изображена на Фиг.2А. В изображенном варианте осуществления, реактивная плита 10 включает в себя исполнительный механизм 12, прикрепленный к каждому одному из четырех углов плиты. Как показано, линейная катушка 18 ротора заземлена на трек 17. Исполнительные механизмы 12 могут быть гидравлическими, электрическими, пневматическими, или тому подобными. Исполнительные механизмы 12 могут функционировать для изгибания реактивной плиты 10 в соответствующую геометрическую форму вокруг спирали, для того, чтобы соответствовать дуге панелей линейной катушки ротора так, что почти постоянный воздушный зазор 19 может поддерживаться. В некоторых вариантах осуществления, если исполнительные механизмы 12 являются электрическими, тележка 14 аттракциона для катания может включать в себя источник питания для подачи питания к электрическим исполнительным механизмам 12. Исполнительные механизмы 12 могут быть выполнены с возможностью работы в сочетании с динамически изгибаемой реактивной плитой 10 в многочисленных направлениях. Как будет обсуждаться ниже, исполнительные механизмы 12 могут принимать команды от одного или нескольких процессоров, выполняя исполняемую команду процессора, сохраненную в одном или нескольких запоминающих устройствах, для воздействия в определенные периоды времени и в желаемых направлениях. Дополнительно, один или несколько датчиков, таких как датчики зазора, могут быть использованы для получения данных, относящихся к положению тележки 14 аттракциона для катания, и треку 17, и отправки данных к одному или нескольким процессорам. Процессоры могут использовать данные датчика в системе замкнутого контура для выполнения математических расчетов для определения, какие исполнительные механизмы 12 приводить в действие, и как они должны выполняться для поддержания воздушного зазора 19.
[0026] Для облегчения обсуждения, ссылка будет сделана к нескольким осям. Например, широтная ось 20 может проходить от передней части к задней части реактивной плиты 10, а продольная ось 22 может проходить от стороны к стороне реактивной плиты 10. Когда тележка 14 аттракциона для катания передвигается по сложной кривой 16, реактивная плита 10 может испытывать вертикальное перемещение, колебание относительно поперечной оси и колебание относительно продольной оси от спирали трека 17, что может послужить причиной промежутка между реактивной плитой 10 и линейной катушкой 18 ротора. Таким образом, для приспособления к колебанию относительно продольной оси, исполнительные механизмы 12 могут быть выполнены с возможностью приведения в действие и изгибания реактивной плиты 10 вокруг широтной оси 20, как показано стрелкой 24. Для приспособления к колебанию относительно поперечной оси, исполнительные механизмы 12 могут быть выполнены с возможностью приведения в действие и изгибания реактивной плиты 10 вокруг продольной оси 22, как показано стрелкой 26. Для приспособления к вертикальному перемещению, исполнительные механизмы 12 могут быть выполнены с возможностью вытягивания или втягивания в вертикальном направлении, как показано стрелкой 28. Таким образом, исполнительные механизмы 12 могут отклонять и/или перемещать реактивную плиту 10, чтобы следовать линейной катушке 18 ротора на всем протяжении спирали сложной кривой 16 для поддержания почти постоянного воздушного зазора 19, когда тележка 14 аттракциона для катания колеблется относительно поперечной оси, колеблется относительно продольной оси и поднимается.
[0027] Следует отметить, что реактивная плита 10 может иметь соответствующий размер, и изготовлена из одного или нескольких подходящих материалов, так что она может быть гибкой и позволять исполнительным механизмам 12 изгибать ее, когда требуется. Например, в одном варианте осуществления реактивная плита 10 может составлять примерно одну восьмую дюйма в толщину, иметь длину один метр, и половину метра в ширину. Кроме того, как упоминалось ранее, реактивная плита 10 может включать в себя алюминиевую панель, что может повысить ее гибкость. Для дополнительной иллюстрации, фиг.2В изображает вид сбоку реактивной плиты 10. В изображенном варианте осуществления верхняя часть 30 реактивной плиты 10 может быть выполнена из ферритового материала (например, железа), а нижняя часть 32 реактивной плиты 10 может быть выполнена из не-ферритового материала (например, алюминия). Не-ферритовый материал может быть проводящим так, что, когда материал проходит через магнитное поле, создаваемое линейной катушкой, не-ферритовый материал может индуцировать вихревые токи (показаны на Фиг.2А, как токи 34), тем самым, создавая свое собственное противоположное магнитное поле, которое взаимодействует с магнитным полем линейной катушки для ускорения или замедления тележки 14 аттракциона для катания. Верхняя часть 30, которая также может упоминаться как опорная плита, может препятствовать потери вихревых токов и, следовательно, потери энергии за счет использования ферритового материала (например, железа). Поскольку используется опорная плита 30, этот вариант осуществления представляет собой односторонний линейный асинхронный двигатель; тем не менее, как подробно обсуждается ниже, в некоторых вариантах осуществления настоящего изобретения опорная плита может не использоваться и линейный асинхронный двигатель может быть двусторонним (например, включать в себя катушки с обеих сторон реактивной плиты).
[0028] Тележка 14 аттракциона для катания может включать в себя цепь 40 тележки аттракциона для катания для управления исполнительными механизмами, как описывалось выше. Соответственно, фиг.3 представляет собой блок-схему цепи 40 тележки аттракциона для катания. Цепь 40 тележки аттракциона для катания может включать в себя компонент 42 связи, процессор 44, датчик 46, запоминающее устройство 48 и источник питания 50. Компонент 42 связи может включать в себя схему, позволяющую использовать беспроводную связь с тележкой 14 аттракциона для катания, когда она перемещается по треку 17. Таким образом, компонент 42 связи может включать в себя плату беспроводной связи. Процессор 44, который может быть одним или несколькими процессорами, может включать в себя любой подходящий процессор или микропроцессор, способный выполнять исполняемую процессором программу. Датчик 46, который может представлять один или несколько датчиков, может включать в себя датчик зазора, выполненный с возможностью получения информации о положении тележки 14 аттракциона для катания (или ее участков) относительно линейной катушки панелей ротора, установленных в треке 17, и отправки данных в процессор 44. В некоторых вариантах осуществления, датчик 46 может включать в себя оптическую систему, которая отслеживает информацию, относящуюся к тележке 14 аттракциона для катания и/или треку 17.
[0029] В качестве одного примера, процессор 44 может управлять системой замкнутого контура с обратной связью посредством данных, полученных от датчика 46, и определять, какие исполнительные механизмы приводить в действие, и как они должны применяться на основе того, где тележка 14 аттракциона для катания расположена на треке 17. Процессор 44 может определить, что некоторые исполнительные механизмы должны вытягиваться или втягиваться для динамичного изгибания соответствующей реактивной плиты в соответствующую геометрическую форму для поддержания определенной величины воздушного зазора, когда тележка 14 аттракциона для катания колеблется относительно поперечной оси, колеблется относительно продольной оси, и/или поднимается по сложной кривой. Датчик 46 может непрерывно получать и передавать данные к процессору 44, который может непрерывно выполнять расчеты и выдавать инструкции для управления исполнительными механизмами, когда это требуется. В другом варианте осуществления компонент 42 связи может принимать командные инструкции от системы управления, расположенной снаружи от тележки 14 аттракциона для катания, например, в центре управления аттракционом, и процессор 44 может быть выполнен с возможностью исполнения полученных инструкций.
[0030] Запоминающее устройство 48, которое может представлять собой один или несколько компонентов запоминающего устройства, может представлять собой любые подходящие промышленные изделия, которые могут служить в качестве средства для хранения исполняемой процессором программы, данных или тому подобного. Эти промышленные изделия могут представлять собой материальные, энергонезависимые машиночитаемые носители (например, любую подходящую форму материальной памяти или хранения), которые могут хранить исполняемую процессором 44 программу для выполнения в настоящее время раскрытых способов. Запоминающее устройство 48 может также использоваться для хранения информации о тележке, полученной с помощью датчика 46, командных инструкций, полученных компонентом 42 связи, или тому подобного. Источник питания 50 может включать в себя любой подходящий источник питания, в том числе, но, не ограничиваясь этим, батареи, солнечные панели, электрический генератор, или любую их комбинацию. Источник питания 50 может подавать питание на исполнительные механизмы.
[0031] Схема последовательности операций процесса 52, применимого для поддержания воздушного зазора в линейном асинхронном двигателе на всем протяжении сложной кривой за счет использования исполнительных механизмов, прикрепленных к реактивным плитам и тележке 14 аттракциона для катания, представлена на фиг.4. Процесс 52 может включать в себя получение данных, относящихся к тележке 14 аттракциона для катания и сложной кривой (блок 54 процесса), определение, какие исполнительные механизмы приводить в действие и рабочий параметр исполнительных механизмов на основе данных, использующих систему с обратной связью (блок 56 процесса), и приведение в действие исполнительных механизмов, как определено, на всем протяжении прхождения сложной кривой (блок 58 процесса) тележкой 14 аттракциона для катания. Процесс 52 может быть реализован в виде исполняемой процессором программы, хранящейся на одном или нескольких энергонезависимых машиночитаемых носителях (например, запоминающем устройстве 48). Более конкретно, в отношении блока 54 процесса, датчик 46, включенный в цепь 40 тележки аттракциона для катания, может получить данные о местоположении тележки 14 аттракциона для катания относительно трека 17. Например, один или несколько датчиков 46 могут обнаружить, насколько большим является зазор между каждой реактивной плитой и линейной катушкой панели ротора, установленной на треке 17. Кроме того, датчики 46 могут обнаружить угол дуг линейной катушки панелей ротора на всем протяжении сложной кривой. Датчики 46 могут отправлять эти данные в процессор 44.
[0032] Процессор 44 может использовать полученные датчиком данные для определения, какие исполнительные механизмы приводить в действие для каждой реактивной плиты, время срабатывания, и рабочий параметр (например, вытягивание, втягивание) выбранных исполнительных механизмов, используя систему с замкнутым контуром (блок 56 процесса). Замкнутая система управления может относиться к системе управления, которая автоматически изменяет выходные команды, основанные на различии между данными обратной связи и входными данными. Входные данные в одном варианте осуществления могут включать в себя данные, относящиеся к воздушному зазору между реактивной плитой и линейной катушкой панелей ротора перед приведением в действие. Поскольку тележка 14 аттракциона для катания перемещается по сложной кривой, датчики 46 могут контролировать и обеспечивать обратную связь относительно промежутка воздушного зазора между реактивной плитой и линейной катушкой панелей ротора после осуществления приведения в действие для процессора 44, так что процессор 44 может выполнить корректировку для последующих исполнительных механизмов на этом участке сложной кривой, если это необходимо. Например, если воздушный зазор меньше, чем желательно, после приведения в действие, процессор 44 может обеспечить команды на исполнительные механизмы последующих реактивных плит, чтобы не вытягиваться далее для того, чтобы увеличить воздушный зазор в этом участке сложной кривой. После того, как исполнительные механизмы были выбраны и их соответствующее действие определено, процессор 44 может приводить в действие исполнительные механизмы соответствующим образом (блок 58 процесса) при непрерывной и постоянно обновляемой процедуре уточнения данных. Таким образом, процессор 44 может динамично контролировать, как реактивные плиты изгибаются и/или перемещаются, чтобы следовать линейной катушке панелей ротора и поддерживать почти постоянный воздушный зазор посредством использования исполнительных механизмов.
[0033] Еще один вариант осуществления системы 60 для поддержания почти постоянного воздушного зазора между ротором и статором линейного асинхронного двигателя на всем протяжении сложной кривой американских горок, иллюстрирован на фиг.5. Этот вариант осуществления включает в себя использование подшипников 62 скольжения и поверхности 64 скольжения. Для целей обсуждения, ссылка будет сделана к множеству осей. Оси включают в себя широтную ось 20, которая продолжается от передней части к задней части реактивной плиты 66, и продольную ось 22, которая продолжается от стороны к стороне реактивной плиты 66. Изображенная реактивная плита 66 может быть прикреплена к нижней части тележки 14 аттракциона для катания. В самом деле, может быть множество сегментированных реактивных плит 66, прикрепленных к нижней части тележки 14 аттракциона для катания, и они могут быть сочлененными согласованным образом для образования определенных общих форм. Также, реактивная плита 66 может быть алюминиевой, и такой же длины, что и линейная катушка ротора 68 (например, асинхронного двигателя), которая крепится к треку 17 так, что реактивная плита 66 может эффективно генерировать вихревые токи для противостояния магнитному полю, создаваемому линейной катушкой ротора 68. Кроме того, реактивные плиты 66 могут быть подобраны по размеру соответствующим образом, чтобы быть гибкими для того, чтобы изгибаться согласно колебанию относительно поперечной оси и колебанию относительно продольной оси спирали сложной кривой.
[0034] В этом варианте осуществления линейная катушка ротора 68 может быть, по существу, покрыта скользящей поверхностью 64. Скользящая поверхность 64 может быть пластичной для обеспечения условия предметного контакта со скользящей поверхностью 64, для скольжения или скатывания. Точно так же, скользящие подшипники 62 прикреплены к нижней части реактивной плиты 66 на обеих ее сторонах. Скользящие подшипники 62 могут быть полосами, которые имеют несколько дюймов в ширину и несколько дюймов в толщину. Точная толщина скользящего подшипника 62 может быть рассчитана для обеспечения воздушного зазора 70 между статором (например, реактивной плитой 66) и линейной катушкой ротора 68 так, что линейный асинхронный двигатель может производить эффективный поперечный вектор силы тяги. Кроме того, скользящие подшипники 62 могут находиться в контакте с и скользить по скользящей поверхности 64 на всем протяжении сложной кривой, таким образом, поддерживая воздушный зазор 70.
[0035] Однако, сложная кривая может привести тележку 14 аттракциона для катания к колебанию относительно поперечной оси и колебанию относительно продольной оси, так что скользящие подшипники 62 и скользящая поверхность 64 могут быть выполнены с возможностью соответствия колебанию относительно поперечной оси и колебанию относительно продольной оси спирали. Таким образом, скользящие подшипники 62 и скользящая поверхность 64 могут быть изогнуты вокруг широтной оси 20, как показано стрелкой 24, на всем протяжении сложной кривой. Кроме того, скользящие подшипники 62 и скользящая поверхность 64 могут быть изогнуты вокруг продольной оси 22, как показано стрелкой 26, на всем протяжении сложной кривой. Хотя сила притяжения линейной катушки и реактивной плиты 66 может быть сильной в точках на всем протяжении сложной кривой, скользящие подшипники 62 могут препятствовать реактивным плитам 66 от сжимания вместе с линейной катушкой ротора 68.
[0036] В некоторых вариантах осуществления один или несколько продольных рычагов или другой сферический шарнирный механизм может быть прикреплен к сегментированным реактивным плитам 66 статора и/или рабочей поверхности 64 линейной катушки ротора 68 для применения осевого усилия к универсальному сочленению, при необходимости, для того, чтобы соответствовать колебанию относительно поперечной оси и колебанию относительно продольной оси тележки 14 или вагона аттракциона для катания на всем протяжении сложной кривой. Продольные рычаги могут толкать реактивные плиты 66, которые включают скользящие подшипники 62, против скользящей поверхности 64 ротора. Продольные рычаги могут быть полуавтоматическими за счет магнитной силы, которая может тянуть реактивные плиты 66 от скользящей поверхности 64 ротора, и заставлять реактивные плиты 66 и скользящие подшипники 62 изгибаться соответствующим образом. Таким образом, реактивные плиты 66 и линейная катушка ротора 68 могут быть сохранены относительно параллельными, таким образом, поддерживая почти постоянный воздушный зазор 70.
[0037] Дополнительно, вариант осуществления системы 71 для поддержания почти постоянного зазора между статором, который включает в себя одну или несколько реактивных плит 72, и ротором, который включает одну или несколько линейных катушек 74, линейного асинхронного двигателя на всем протяжении сложной кривой трека 17 американских горок за счет использования гидравлической жидкости, показан на фиг.6. Для целей обсуждения, ссылка будет сделана к множеству осей. Оси включают в себя широтную ось 20, которая продолжается от передней части к задней части реактивной плиты 72, и продольную ось 22, которая продолжается от стороны к стороне реактивной плиты 72. Изображенная реактивная плита 72 может быть прикреплена к нижней части тележки 14 аттракциона для катания. В самом деле, может быть множество сегментированных реактивных плит 72, прикрепленных к нижней части тележки 14 аттракциона для катания, и они могут быть сочлененными. Также, реактивная плита 72 может быть алюминиевой, и такой же длины, что и линейная катушка 74 ротора (например, асинхронного двигателя), которая крепится к треку 17 так, что реактивная плита 72 может эффективно генерировать вихревые токи для противостояния магнитному полю, создаваемому линейной катушкой 74 ротора. Кроме того, реактивные плиты 72 могут быть подобраны по размеру соответствующим образом, чтобы быть гибкими для того, чтобы изгибаться согласно колебанию относительно поперечной оси и колебанию относительно продольной оси спирали сложной кривой.
[0038] В этом варианте осуществления система 71 может вводить гидравлическую жидкость 76 между реактивными плитами 72 и линейной катушкой 74 ротора для поддержания зазора. Гидравлическая жидкость 76 может быть введена посредством одного или нескольких распылителей, установленных в треке 17 и/или тележке 14 аттракциона для катания. Система 71 может включать в себя уплотнения 78, удерживающие гидравлическую жидкость 76 после ее распыления между реактивными плитами 72 и линейной катушкой 74 ротора. Кроме того, трек 17 может включать в себя измененную геометрию поверхности 80 (например, канавки), которая способствуют потоку текучей среды. Гидравлическая жидкость 76 может включать в себя воду, которая может функционировать в качестве гидродинамического подшипника между реактивными плитами 72 и линейной катушкой 74 ротора для предотвращения обеих от контакта друг с другом. Использование гидравлической жидкости 76 может уменьшить структурные требования к тележке 14 аттракциона для катания. Когда тележка 14 аттракциона для катания перемещается по спирали сложной кривой, реактивные плиты 72 могут быть изогнуты вокруг широтной оси 20, как показано стрелкой 24, и вокруг продольной оси 22, как показано стрелкой 26, чтобы соответствовать колебанию относительно поперечной оси и колебанию относительно продольной оси тележки 14 аттракциона для катания, в это время гидравлическая жидкость 76 вводится для предотвращения реактивных плит 72 от соединения с линейной катушкой 74 ротора. Так как гидравлическая жидкость 76 может быть несжимаемым веществом, зазор между реактивными плитами 72 и линейной катушкой 74 ротора может поддерживаться, тем самым сохраняя эффективность линейного асинхронного двигателя.
[0039] Должно быть понятно, что описанные выше линейные асинхронные двигатели могут быть или односторонними или двусторонними, как показано на фигурах 78А и 7В, соответственно. Односторонний линейный асинхронный двигатель 82, иллюстрированный на фиг.7А, включает в себя статор 84 и ротор 86. Статор может включать в себя реактивную плиту с не ферритовой панелью 88 (например, алюминиевую), которая обращена к ротору 86. Не ферритовая панель 88 может быть проводящей, и она может индуцировать вихревые токи, когда она проходит через магнитное поле, генерированное ротором 86. Реактивная плита 84 может дополнительно включать в себя опорную плиту 90, которая изготовлена из ферритового материала, например, железа. Опорная плита 90 может задерживать вихревые токи, индуцированные в не ферритовом материале 88, от рассеивания и потерь. Ротор 86 может включать в себя линейные катушки (например, асинхронного двигателя), находящиеся посередине ферритового сердечника. Линейные катушки могут питаться трехфазной электрической энергией для генерирования магнитного поля. Двусторонний линейный асинхронный двигатель 92, изображенный на фиг.7В, может включать в себя реактивную плиту 94, изготовленную из проводящего материала, такого как алюминий, зажатую между линейными катушками 96 (например, асинхронных двигателей) с обеих сторон реактивной плиты 94. В обоих одностороннем линейном асинхронном двигателе 82 и двустороннем линейном асинхронном двигателе 92, почти постоянный воздушный зазор может поддерживаться путем использования технических приемов, описанных выше.
[0040] В еще одном варианте осуществления, фиг.8 иллюстрирует двусторонний линейный синхронный двигатель 100, который может использовать постоянные магниты 102, установленные на панелях ротора и линейные катушки статора 104 для поддержания почти постоянного воздушного зазора по сложной кривой трека 17 американских горок. Постоянные магниты могут чередоваться полюсами (например, северным и южным), как изображено, а линейная катушка статора 104 может быть закреплена на тележке 14 аттракциона для катания. Постоянные магниты 102 могут быть закреплены к панелям 106 ротора в треке 17 по обеим сторонам от статора 104. Панели 106 ротора могут иметь сходство с сочлененным позвоночником, в котором каждый участок его содержит постоянный магнит 102 могущий быть позвонком и позвонки могут быть разделены посредством гибкой подложки (например, зубчатой области) 108, которая позволяет позвоночнику изгибаться вокруг спиральной дуги сложной кривой. Например, гибкая подложка может включать в себя кабель. Зазор между линейной катушкой статора 104 и постоянными магнитами 102 может быть сохранен, когда тележка 14 аттракциона для катания колеблется относительно поперечной оси и колеблется относительно продольной оси на сложной кривой посредством магнитного притяжения и отталкивания магнитов в магнитном поле, генерированном линейной катушкой статора 104 на обеих сторонах статора 104, одновременно.
[0041] В этом варианте осуществления, тележка 14 аттракциона для катания может включать в себя цепь 40, как обсуждалось выше со ссылкой к фиг. 3. В частности, так как линейная катушка статора 104 прикреплена к тележке 14 аттракциона для катания, тележка 14 аттракциона для катания может включать в себя источник 50 питания для подачи питания на обмотки катушки для того, чтобы генерировать магнитное поле, которое притягивает или отталкивает магниты 102, прикрепленные к панелям ротора, тем самым, изгибая или перемещая панели 106 ротора посредством гибкой подложки, когда требуется, для поддержания воздушного зазора. Кроме того, запоминающее устройство 48 может хранить исполняемую процессором программу, которую процессор 44 использует для управления источником питания 50 для обеспечения питания в разное время на всем протяжении сложной кривой на основе данных о положении, полученных от датчика 46. В других вариантах осуществления компонент 42 связи цепи 40 тележки аттракциона для катания может принимать инструкции от внешнего источника, например, командного центра увеселительного аттракциона, который диктует, как обеспечивать питание для линейной катушки статора 104.
[0042] Фиг.9 представляет собой схему последовательности операций процесса 110, применимого для поддержания воздушного зазора в линейном синхронном двигателе за счет подачи энергии к обмоткам линейных катушек в соответствии с вариантом осуществления. Процесс 110 может включать в себя получение данных, относящихся к тележке 14 аттракциона для катания и сложной кривой (блок 112 процесса), определение того, когда подавать энергию к обмоткам и сколько энергии подавать на основе данных (блок 114 процесса), и подачу питания к обмоткам линейных катушек, как это определено (блок 116 процесса). Процесс 110 может быть реализован в виде исполняемой процессором программы, хранящейся на одном или нескольких энергонезависимых машиночитаемых носителях.
[0043] Более конкретно, блок 112 процесса может включать в себя получение данных, относящихся к тележке 14 аттракциона для катания и сложной кривой с использованием датчиков для обнаружения воздушных зазоров между линейной катушкой статора и постоянными магнитами на панелях ротора, прикрепленных к треку 17. Если воздушный зазор является слишком близким к одной панели ротора, то вполне вероятно, что воздушный зазор является слишком большим для другой панели ротора. Датчики могут посылать данные воздушного зазора к процессору, который может определить, сколько энергии подавать для устранения разницы зазора, и когда подавать энергию (блок 114 процесса). Процессор может затем управлять источником питания для подачи энергии, как определено, а источник питания может выполнять, соответственно (блок 116 процесса). В результате, постоянные магниты могут притягивать или отталкивать в магнитном поле обмоток линейной катушки, для изгибания или перемещения панелей ротора посредством гибкой подложки, и воздушный зазор может быть изменен. Таким образом, зазор между линейной катушкой статора и постоянными магнитами, прикрепленными к панелям ротора, может поддерживаться на обеих сторонах линейного синхронного двигателя.
[0044] Только некоторые признаки настоящего раскрытия были проиллюстрированы и раскрыты в данном документе, многие модификации и изменения будут встречаться у специалистов в данной области техники. Поэтому, должно быть понято, что прилагаемая формула изобретения предназначена для покрытия всех таких модификаций и изменений, которые подпадают под действительную сущность раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ТОРМОЖЕНИЯ ИЛИ ПРОДВИЖЕНИЯ ПЕРЕДВИЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2748729C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТИРОВКОЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2699952C2 |
| КАПСУЛЬНЫЙ АТТРАКЦИОН ДЛЯ КАТАНИЯ ПАРКА РАЗВЛЕЧЕНИЙ | 2018 |
|
RU2764152C2 |
| КОНТРОЛЛЕР МОДЕЛЬНОГО АТТРАКЦИОНА | 2015 |
|
RU2677106C2 |
| АТТРАКЦИОН ПАРКА РАЗВЛЕЧЕНИЙ С КОЛЬЦЕВОЙ ИМИТАЦИЕЙ ДВИЖЕНИЯ | 2018 |
|
RU2722476C1 |
| БЕЗРЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО АТТРАКЦИОНА ДЛЯ КАТАНИЯ DARK RIDE, СИСТЕМА И СПОСОБ | 2012 |
|
RU2591549C2 |
| СИСТЕМА КАТАНИЯ (ВАРИАНТЫ) | 2015 |
|
RU2764235C2 |
| ДИНАМОЭЛЕКТРИЧЕСКАЯ МАШИНА, ВРАЩАЮЩАЯСЯ ПОСРЕДСТВОМ ЭЛЕКТРОМАГНИТНОЙ ИНДУКЦИИ, ДЕЙСТВУЮЩЕЙ В ЛИНЕЙНЫХ ЭЛЕКТРОДВИГАТЕЛЯХ | 1998 |
|
RU2248080C2 |
| СИСТЕМА УПРАВЛЕНИЯ АТТРАКЦИОНОМ ДЛЯ КАТАНИЯ (ВАРИАНТЫ) | 2017 |
|
RU2753949C2 |
| СИСТЕМА И СПОСОБ ДЛЯ МОДУЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ ДЛЯ КАТАНИЯ | 2015 |
|
RU2692821C2 |
Группа изобретений относится к электротяге, создаваемой линейными двигателями. Система для торможения или запуска тележки аттракциона для катания содержит линейный асинхронный двигатель, установленный на изогнутом участке трека, тележку аттракциона для катания, расположенную на треке, реактивные плиты, датчики и процессор. Реактивные плиты присоединены к стороне тележки аттракциона для катания, обращенной к треку, посредством множества исполнительных механизмов. Датчики выполнены с возможностью определения воздушного зазора между реактивными плитами и линейным асинхронным двигателем. Процессор выполнен с возможностью определения, какой из множества исполнительных механизмов приводить в действие, и требуемого рабочего параметра каждого из множества исполнительных механизмов на основании данных, принятых от датчиков, для изгибания реактивных пластин для поддержания воздушного зазора на требуемом уровне на всем протяжении прохождения изогнутого участка трека тележкой аттракциона для катания. Также заявлены вариант системы и способ торможения или запуска тележки аттракциона для катания. Технический результат заключается в улучшении управления движением тележки аттракциона для катания на изогнутых участках трека. 3 н. и 17 з.п. ф-лы, 11 ил.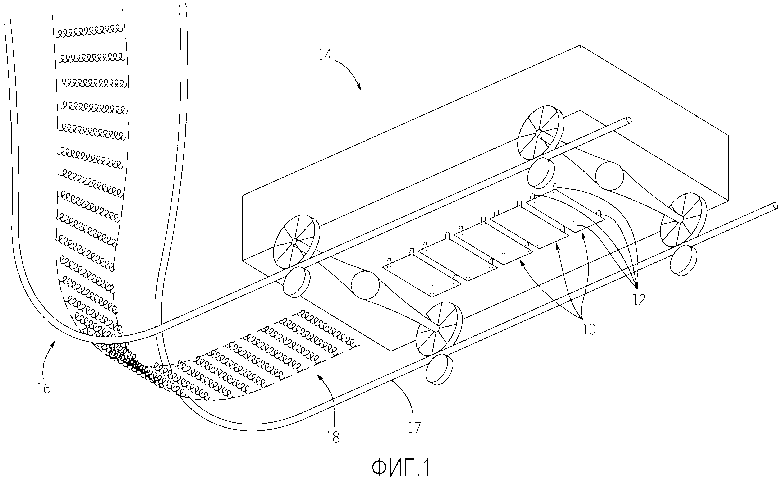
1. Система для торможения или запуска тележки аттракциона для катания, содержащая:
- линейный асинхронный двигатель (LIM), установленный на изогнутом участке трека;
- тележку аттракциона для катания, расположенную на треке;
- одну или более реактивных плит, присоединенных к стороне тележки аттракциона для катания, обращенной к треку, посредством множества исполнительных механизмов;
- один или более датчиков, выполненных с возможностью определения воздушного зазора между одной или более реактивными плитами и линейным асинхронным двигателем; и
- процессор, выполненный с возможностью определения, какой из множества исполнительных механизмов приводить в действие, и требуемого рабочего параметра каждого из множества исполнительных механизмов на основании данных, принятых от одного или более датчиков, для изгибания одной или более реактивных пластин для поддержания воздушного зазора на требуемом уровне на всем протяжении прохождения изогнутого участка трека тележкой аттракциона для катания.
2. Система по п.1, содержащая один или более распылителей, установленных в треке с возможностью впрыскивать гидравлическую жидкость между одной или более реактивными плитами и линейным асинхронным двигателем для создания гидродинамического подшипника, и стеновые уплотнения, которые контактируют со сторонами тележки аттракциона для катания, когда она перемещается на всем протяжении изогнутого участка для удержания гидравлической жидкости.
3. Система по п.1, в которой процессор выполнен с возможностью определения того, какие из множества исполнительных механизмов приводить в действие, и требуемого рабочего параметра каждого из множества исполнительных механизмов на основании данных, полученных от одного или более датчиков, для изгибания одной или нескольких реактивных плит для поддержания воздушного зазора на требуемом уровне на всем протяжении прохождения криволинейного участка трека тележкой аттракциона для катания.
4. Система по п.1, в которой множество исполнительных механизмов и одна или более реактивных плит выполнены с возможностью взаимодействия для изгибания выбранных реактивных плит для соответствия дугам изогнутого участка трека на основании приведения в действие выбранных исполнительных механизмов, которые определены процессором.
5. Система по п.1, в которой процессор выполнен с возможностью использования системы обратной связи с замкнутым контуром для определения требуемого рабочего параметра каждого из множества исполнительных механизмов, когда тележка аттракциона для катания проходит изогнутый участок трека, для поддержания воздушного зазора на требуемом уровне.
6. Система по п.1, в которой линейный асинхронный двигатель включает в себя обмотки линейной катушки, расположенные в ферритовом сердечнике и покрытые панелью.
7. Система по п.6, в которой одна или несколько реактивных плит имеют тот же размер, что и обмотки линейной катушки.
8. Система по п.1, в которой одна или несколько реактивных плит каждая включает в себя нижнюю сторону, изготовленную из алюминия, которая обращена к линейному асинхронному двигателю, и верхнюю опорную плиту, изготовленную из железа.
9. Система по п.1, в которой каждая из одной или более реактивных плит включает в себя четыре угла, при этом один исполнительный механизм из множества исполнительных механизмов расположен в каждом из четырех углов.
10. Система по п.1, в которой трек содержит два рельса, а тележка аттракциона для катания включает в себя два скользящих подшипника, прикрепленных к стороне тележки аттракциона для катания, обращенной к треку, при этом один скользящий подшипник выровнен с каждым рельсом трека и проходит от передней части реактивной плиты к задней части реактивной плиты, которая контактирует со скользящей поверхностью, расположенной на верхней части трека на всем протяжении изогнутого участка трека.
11. Система по п.1, в которой изогнутый участок содержит сложную кривую и в которой одна или несколько реактивных плит являются сочлененными, гибкими, сегментированными или их комбинацией.
12. Система по п.1, в которой линейный асинхронный двигатель является односторонним или двусторонним.
13. Система для торможения или запуска тележки аттракциона для катания, содержащая:
- линейный синхронный двигатель, включающий ротор, содержащий попеременные полюса постоянных магнитов, установленных на позвонковых панелях, сочлененных посредством гибкой подложки, при этом ротор установлен на двух сторонах участка сложной кривой трека американских горок, и статор, содержащий обмотки линейной катушки, прикрепленный к нижней части тележки аттракциона для катания, расположенной на треке, при этом тележка аттракциона для катания содержит:
- источник питания и
- процессор, выполненный с возможностью определения, сколько энергии подавать для обмоток линейной катушки и когда подавать энергию для поддержания достаточных воздушных зазоров между статором и позвонковыми панелями ротора, и для побуждения источника питания к подаче энергии, которая установлена на всем протяжении участка сложной кривой.
14. Система по п.13, в которой притяжение и отталкивание постоянных магнитов в магнитном поле, генерированном посредством обмоток линейной катушки, заставляет позвонковые панели ротора изгибаться или перемещаться посредством гибкой подложки для соответствия колебанию относительно поперечной оси и колебанию относительно продольной оси, испытываемому тележкой аттракциона для катания на всем протяжении участка сложной кривой.
15. Система по п.13, в которой тележка аттракциона для катания содержит один или более датчиков зазора, выполненных с возможностью получения данных относительно воздушного зазора между ротором и статором и для отправки данных к процессору.
16. Система по п.15, в которой процессор выполнен с возможностью определения количества энергии для подачи к обмоткам линейной катушки и когда подавать энергию для корректировки воздушных зазоров на основе полученных от датчика данных.
17. Система по п.13, в которой гибкая подложка содержит кабель, который допускает позвонковым панелям ротора быть позиционированными при различных углах на участке сложной кривой.
18. Способ для торможения или запуска тележки аттракциона для катания, содержащий этапы, на которых:
- получают данные, относящиеся к тележке увеселительного аттракциона для катания, расположенной на треке, и участку сложной кривой трека посредством одного или более датчиков;
- определяют посредством процессора выбранную реактивную плиту из множества реактивных плит для приведения в действие на основании полученных данных, использующих систему с замкнутым контуром, для поддержания воздушного зазора между множеством реактивных плит и линейным асинхронным двигателем, установленном в треке; и
- приводят в действие исполнительные механизмы, соединяющие выбранную реактивную плиту со стороной тележки увеселительного аттракциона для катания, которая определена на всем протяжении прохождения участка сложной кривой тележкой увеселительного аттракциона для катания, для изгибания выбранной реактивной плиты для поддержания воздушного зазора ниже порогового значения расстояния на всем протяжении прохождения участка сложной кривой.
19. Способ по п.18, в котором один или более датчиков зазора содержат датчики зазора, присоединенные к тележке увеселительного аттракциона для катания, при этом датчики выполнены с возможностью получения данных относительно воздушного зазора между множеством реактивных плит и линейным асинхронным двигателем.
20. Способ по п.18, включающий использование одного или более датчиков для отправки ответной реакции к процессору, которая включает изменения в воздушном зазоре после приведения в действие исполнительных механизмов на сегменте участка сложной кривой, так что процессор может вычислить изменения при последующих приведениях в действие на сегменте участка сложной кривой.
| WO 2007098601 A1, 07.09.2007 | |||
| WO 2007108586 A1, 27.09.2007 | |||
| US 5904101 A, 18.05.1999 | |||
| JP H07231515 A, 29.08.1995 | |||
| МАГНИТНОЕ ТОРМОЗНОЕ УСТРОЙСТВО | 2003 |
|
RU2293667C2 |

