УРОВЕНЬ ТЕХНИКИ
[0001] Раскрытие сущности настоящего изобретения относится, в общем, к транспортировке транспортных средств, и, более конкретно, к системам и способам для управления транспортировкой транспортных средств в аттракционе парка развлечений.
[0002] Эта секция предназначена для ознакомления читателя с различными аспектами данной области техники, которые могут быть связаны с различными аспектами технологий настоящего изобретения, которые описаны и/или заявлены ниже. Это обсуждение, как предполагается, будет полезным для предоставления читателю основной информации для обеспечения лучшего понимания различных аспектов раскрытия сущности настоящего изобретения. Соответственно, следует понимать, что эти утверждения следует понимать в этом свете, а не в качестве признания предшествующего уровня техники.
[0003] Парки развлечений часто включают в себя аттракционы, которые включают в себя маневрирование транспортных средств в развлекательных целях. Такие аттракционы могут включать в себя аттракционы для катания, которые функционируют для транспортировки гостей или посетителей парка развлечений. Например, транспортным средствам, управляемым посетителями, может быть обеспечена возможность проезда по определенной области (например, по помещению для аттракциона «сталкивающиеся автомобили», по картодрому), транспортные средства могут транспортировать посетителей вдоль фиксированных или управляемых направляющих, и т.д. Аттракционы, которые включают в себя маневрирование транспортных средств в развлекательных целях, могут также включать в себя представления (например, демонстрации трюков), которые выполняются в режиме реального времени для обеспечения визуальной стимуляции на основе действий, выполняемых транспортными средствами. Например, транспортные средства, управляемые водителями-каскадерами, могут выполнять сложные маневры, включенные в сцену демонстрации трюков в режиме реального времени. Традиционные системы для маневрирования и управления перемещением таких транспортных средств ограничены в отношении природы перемещений, которые могут быть выполнены в этих типах аттракционов. В настоящее время понятно, что необходимо обеспечить улучшенные системы и способы для управления перемещениями транспортных средств, которые обеспечивают возбуждение зрителей и катающихся.
КРАТКОЕ ОПИСАНИЕ
[0004] Некоторые варианты осуществления, соразмерные по объему с исходно заявленным объектом изобретения, обсуждаются ниже. Эти варианты осуществления не предназначены для ограничения объема раскрытия сущности настоящего изобретения. Действительно, раскрытие сущности настоящего изобретения может охватывать множество форм, которые могут быть подобными или отличными от вариантов осуществления, изложенных ниже.
[0005] Согласно одному аспекту раскрытия сущности настоящего изобретения, система может включать в себя множество элементов сетки, аналитическую систему, и систему управления. Множество элементов сетки могут быть установлены в динамической области вождения в аттракционе и могут быть выполнены с возможностью функционирования, на основе команд, принятых от системы управления, для управления перемещением транспортного средства, расположенного на множестве элементов сетки. Аналитическая система может быть выполнена с возможностью отслеживания, посредством одного или нескольких датчиков, информации о транспортном средстве, включающей в себя положение, размер, скорость, ускорение транспортного средства, или любую их комбинацию, и отправки информации о транспортном средстве системе управления посредством модуля связи, а система управления может быть выполнена с возможностью приема информации о транспортном средстве посредством модуля связи, определения, посредством одного или нескольких процессоров, какие из множества элементов сетки следует привести в действие, и соответствующего способа приведения в действие, на основе требуемого перемещения транспортного средства, и отправки команд, включающих в себя данные о функционировании, каждому из множества элементов сетки, идентифицированных для приведения в действие.
[0006] Согласно другому аспекту раскрытия сущности настоящего изобретения, система может включать в себя множество элементов сетки, аналитическую систему, и систему управления. Множество элементов сетки могут быть выполнены с возможностью управления перемещением самодвижущегося транспортного средства при сцеплении с транспортным средством, и может быть рассеяно по площадке динамической области вождения развлекательного аттракциона, аналитическая система может быть выполнена с возможностью контроля информации о транспортном средстве, в том числе, угловой скорости и плоскостного направления ведомого колеса транспортного средства, и отправки информации системе управления, система управления может быть выполнена с возможностью отправки команд элементам сетки для вращения блока управления перемещением элемента сетки на основе плоскостного направления и угловой скорости ведомого колеса в заданный момент времени приведения в действие.
[0007] Согласно другому аспекту раскрытия сущности настоящего изобретения, способ может включать в себя отслеживание, посредством аналитической системы, информации о транспортном средстве для одного или нескольких транспортных средств, причем одно или несколько транспортных средств едут по динамической области вождения аттракциона или приближаются к ней, отправку, посредством аналитической системы, информации о транспортном средстве системе управления, с использованием модуля связи аналитической системы и модуля связи системы управления, которые соединены с возможностью связи, определение, посредством системы управления, какие из множества элементов сетки, установленных в поверхности динамической области вождения, следует привести в действие, и способа приведения в действие, на основе информации о транспортном средстве, принятой системой управления от аналитической системы, и требуемого перемещения для одного или нескольких транспортных средств, отправку, посредством системы управления, команд, содержащих информацию о функционировании для каждого из множества элементов сетки, идентифицированных для приведения в действие, с использованием модуля связи системы управления и модуля связи выбранных элементов сетки, и исполнение команд посредством блоков управления перемещением множества элементов сетки, идентифицированных для приведения в действие.
ЧЕРТЕЖИ
[0008] Эти и другие признаки, аспекты, и преимущества раскрытия сущности настоящего изобретения станут более понятными после прочтения нижеследующего подробного описания со ссылкой на сопутствующие чертежи, в которых подобные символы представляют подобные части во всех чертежах, в которых:
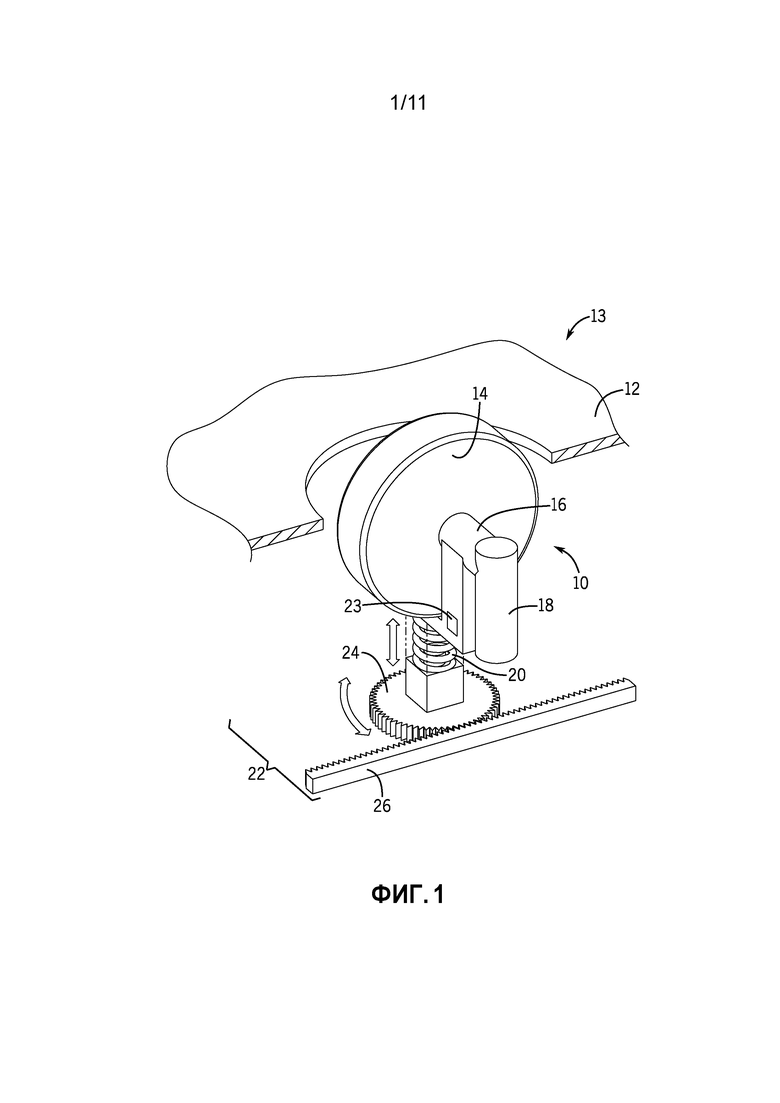
[0009] Фиг. 1 иллюстрирует элемент сетки, установленный в динамической области вождения, согласно одному варианту осуществления;
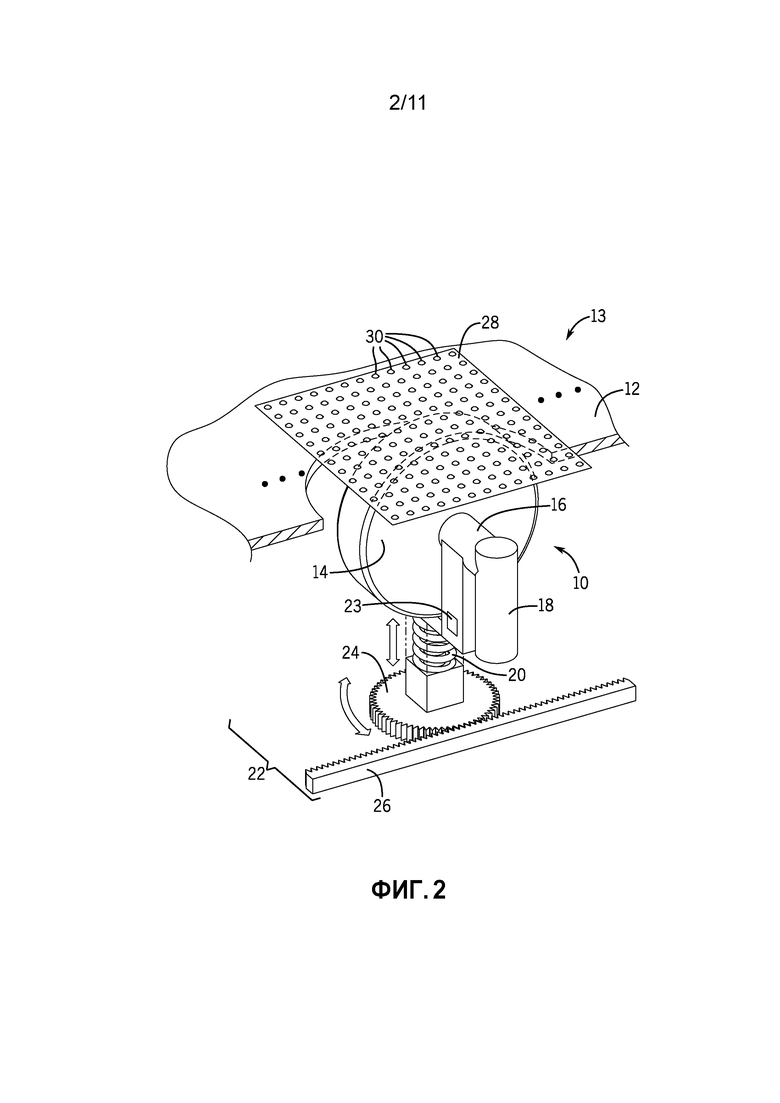
[0010] Фиг. 2 иллюстрирует элемент сетки, который управляет накладываемым листом шарикоподшипников, установленным в динамической области вождения, согласно одному варианту осуществления;
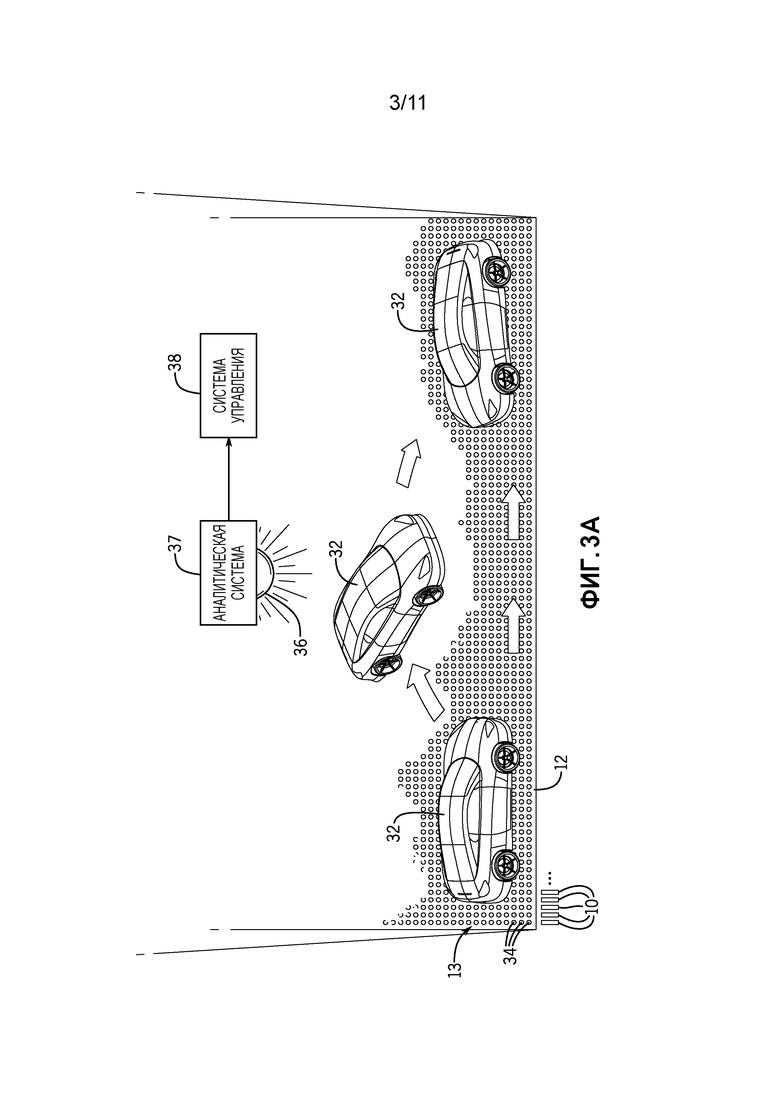
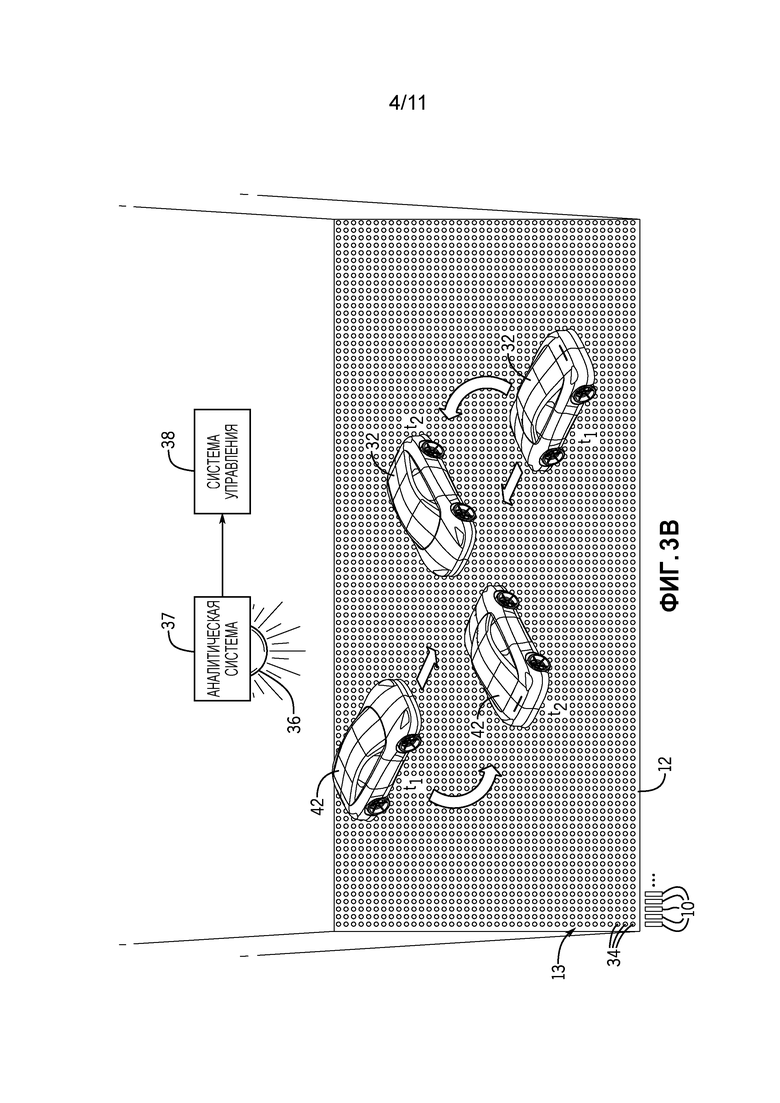
[0011] Фиг. 3А иллюстрирует систему, управляющую транспортировкой одного транспортного средства, которая включает в себя элементы сетки фиг. 1, аналитическую систему, и систему управления, а фиг. 3В иллюстрирует систему, управляющую транспортировкой более одного транспортного средства, согласно одному варианту осуществления;
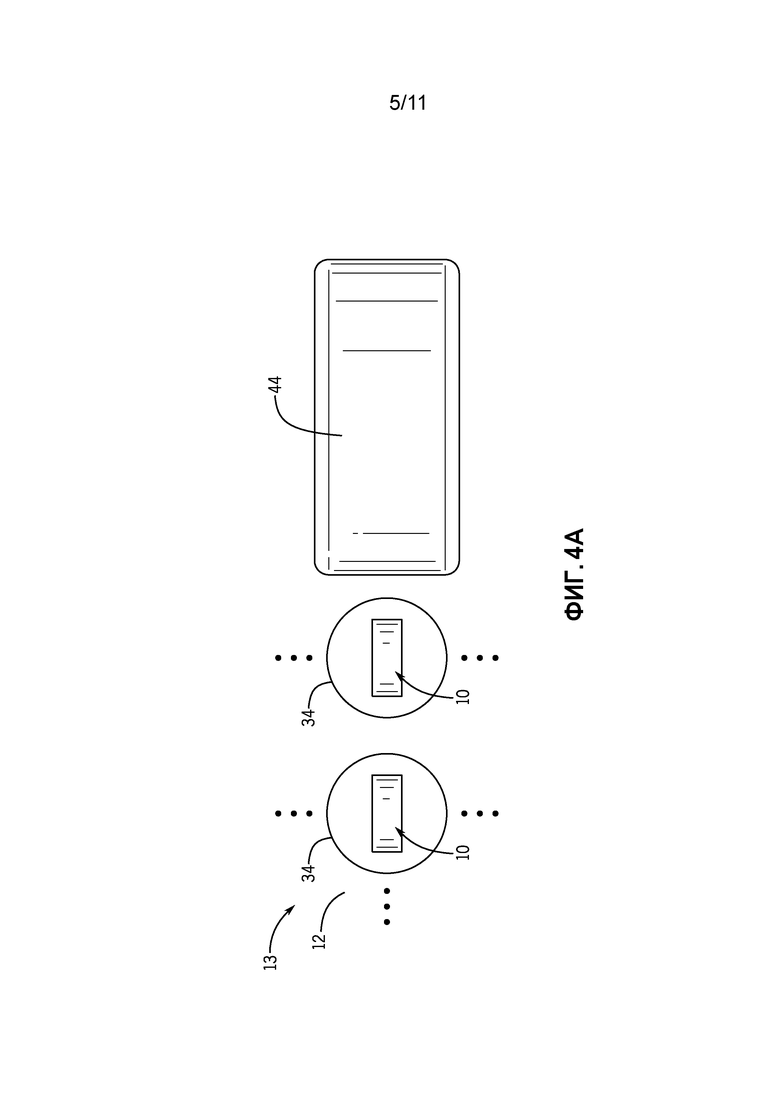
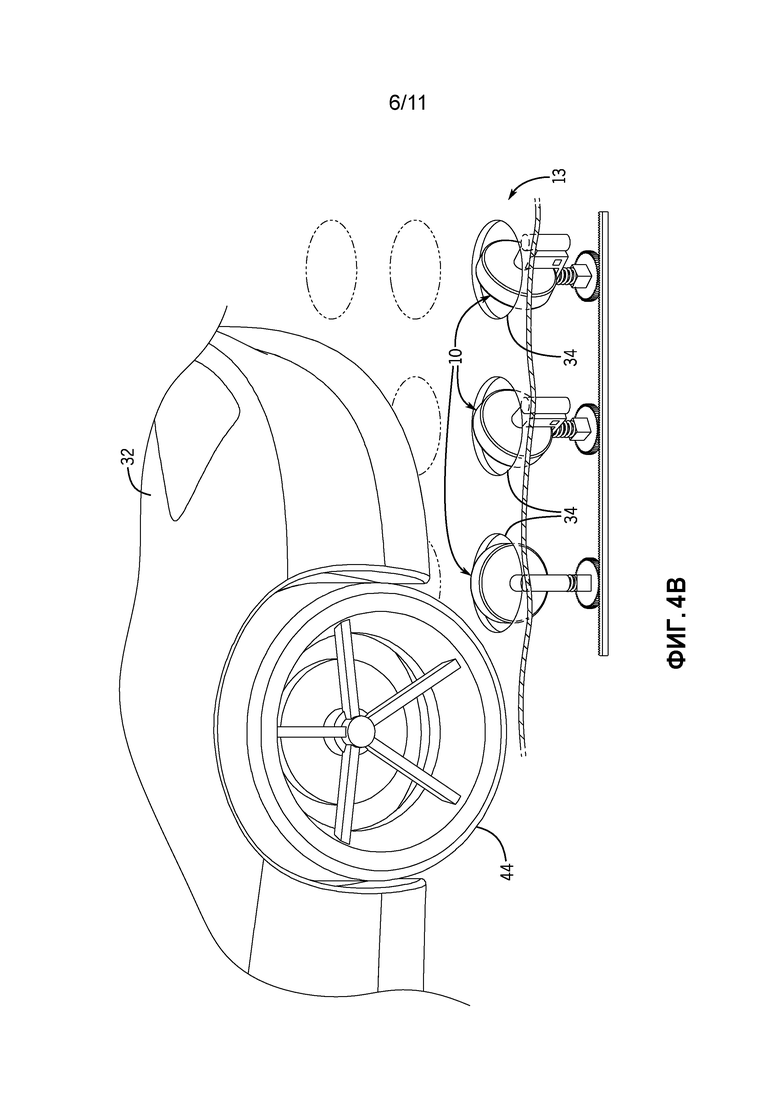
[0012] Фиг. 4A и фиг. 4B иллюстрируют вид сверху и вид сбоку, соответственно, элементов сетки фиг. 1, установленных в динамической области вождения, относительно колеса транспортного средства, согласно одному варианту осуществления;
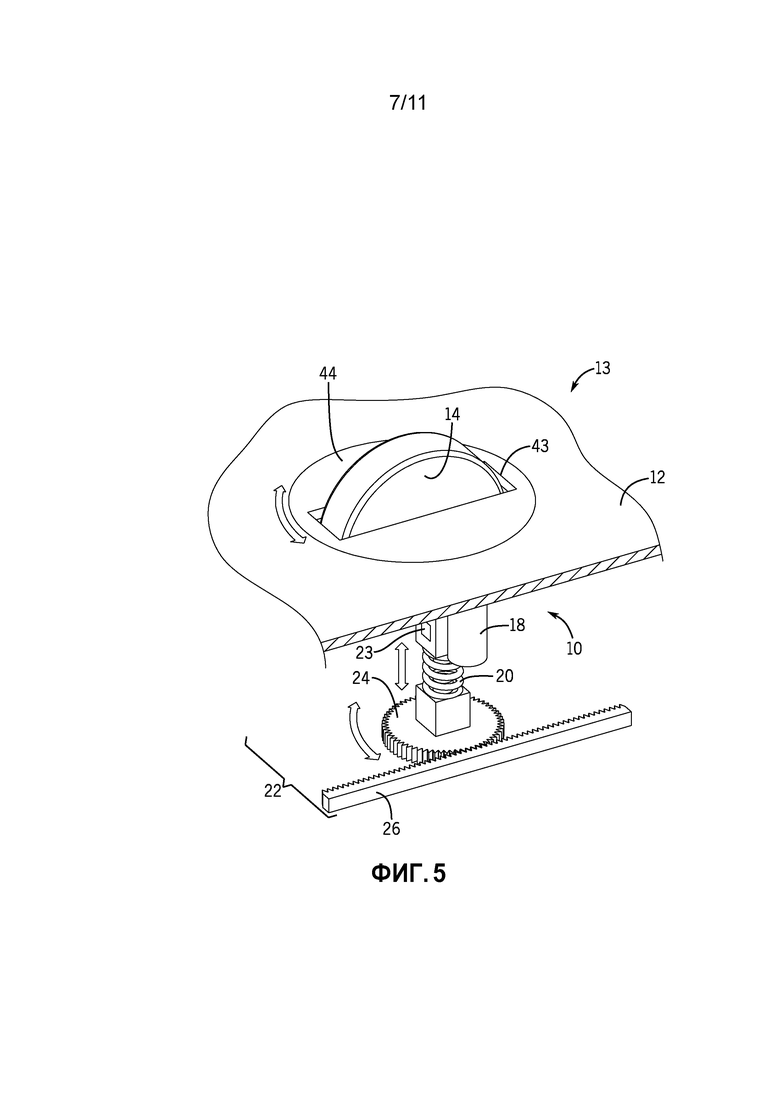
[0013] Фиг. 5 иллюстрирует элемент сетки, выдающийся из прорези в круглом участке динамической области вождения, согласно одному варианту осуществления;
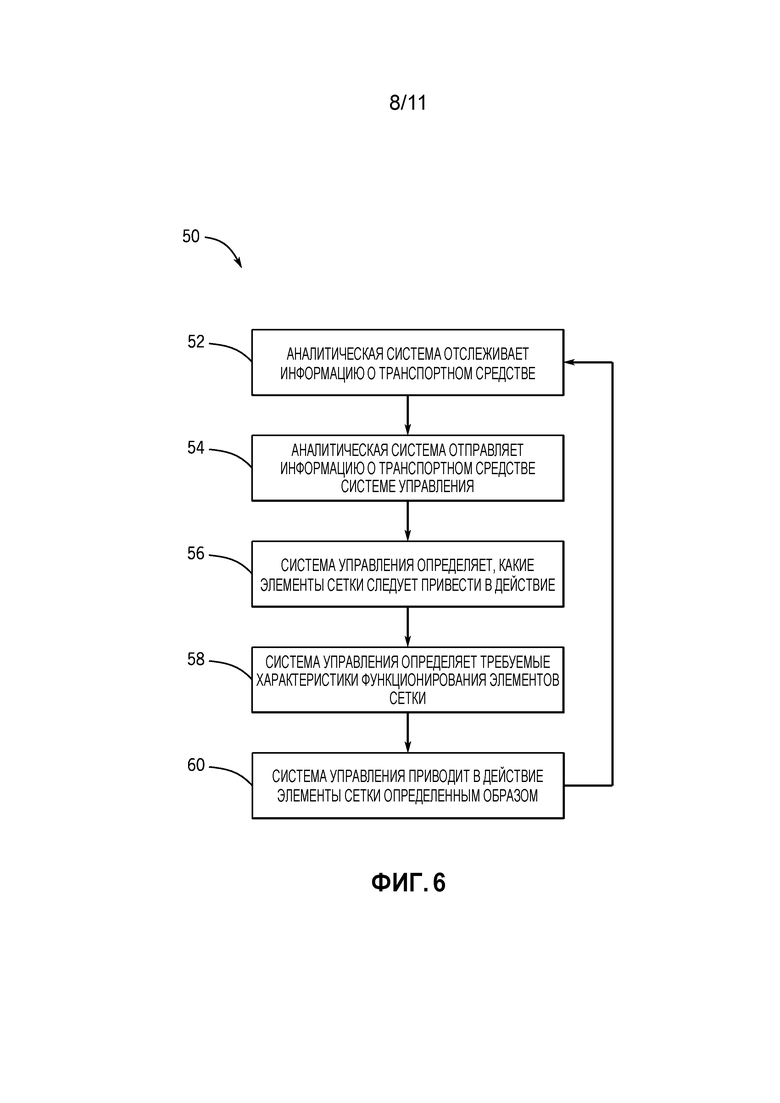
[0014] Фиг. 6 является блок-схемой последовательности операций способа для управления транспортировкой транспортного средства, с использованием аналитической системы, согласно одному варианту осуществления;
[0015] Фиг. 7 является блок-схемой последовательности операций способа для управления транспортировкой транспортного средства, с использованием системы отслеживания положения, согласно одному варианту осуществления;
[0016] Фиг. 8 иллюстрирует блок-схему системы, выполненной с возможностью выполнения способов фиг. 6 и фиг. 7, согласно одному варианту осуществления; и
[0017] Фиг. 9 иллюстрирует колесный элемент, используемый для управления транспортировкой транспортного средства, согласно одному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0018] Ниже будут описаны один или несколько конкретных вариантов осуществления раскрытия сущности настоящего изобретения. С целью обеспечения краткого описания этих вариантов осуществления, не все признаки фактической реализации могут быть описаны в этом описании изобретения. Следует понимать, что при разработке любой такой фактической реализации, как и при любом конструировании или проектировании, должны быть приняты многочисленные специфические для реализации решения для достижения конкретных целей разработчиков, такие как соответствие ограничениям, связанным с системой или бизнесом, которые могут меняться в разных реализациях. Кроме того, следует понимать, что такие работы по проектированию могут быть сложными и занимающими много времени, но, тем не менее, могут быть установленной практикой, предпринимаемой в отношении проектирования, изготовления, и выпуска, для специалистов в данной области техники, пользующихся этим раскрытием сущности изобретения.
[0019] При введении элементов различных вариантов осуществления раскрытия сущности настоящего изобретения, предполагается, что упоминание элемента в единственном числе означает, что могут существовать один или несколько таких элементов. Предполагается, что термины «содержащий», «включающий в себя», и «имеющий» являются включающими в себя, что означает, что могут быть дополнительные элементы, отличные от перечисленных элементов.
[0020] Аттракционы в парках развлечений, которые включают в себя перемещающиеся транспортные средства, могут быть ограничены физическими ограничениями транспортного средства и природы данной области (например, рельсовый путь, арена, трасса), по которой транспортное средство едет, которую можно назвать «областью вождения». Например, в аттракционе с автомобильной демонстрацией (шоу), маневры, которые водитель-каскадер может выполнить, являются, обычно, маневрами, которые любое транспортное средство может выполнить при езде по нормальной дороге, такими как повороты с заносом (donut), намеренная пробуксовка шин (burn-out), виляние (swerving), прокладывание пути (trail braking), маневры технологии вступления в преследование (pursuit intervention technique - PIT), и т.п. То же самое может быть истинным для транспортных средств, используемых в аттракционах для катания, управляемых посетителями, таких как «сталкивающиеся автомобили», карты, и т.д. Кроме того, каждый из маневров, выполняемых в автомобильной демонстрации и/или в аттракционе для катания, происходит таким образом, как зритель или оператор ожидает это увидеть в реальном времени. А именно, эти транспортные средства и соответствующие им области вождения обычно являются неспособными обеспечить некоторые специализированные маневры и/или эффекты, которые кажутся представляющими непреодолимые трудности при естественном движении.
[0021] Варианты осуществления настоящего изобретения направлены на обеспечение управляемого маневрирования транспортных средств, или в качестве части демонстрации, или в качестве части аттракциона для катания, таким образом, чтобы это обеспечивало иллюзию управляемого по времени действия. Управляемое по времени действие может относиться к имитации переменных скоростей действия, как если бы обеспечивалось управление по времени. Во время управляемого по времени действия, некоторые обычно незаметные события могут быть замедлены в достаточной степени для того, чтобы они могли быть восприняты зрительской аудиторией и/или посетителями. Например, управляемое по времени действие может включать в себя почти мгновенное замедление транспортного средства, выполнение маневра (например, поворот на 180° или 360°) в замедленном движении во время замедленного периода, и быстрое ускорение автомобиля до его начальной скорости. Системы и способы для имитации этого эффекта, как компонента демонстрации или аттракциона для катания с реальным действием, могут создавать впечатление того, что транспортное средство, зрители, и/или катающиеся фактически испытывают действие замедленного движения, или впечатление того, что происходит замедление времени. Обычно, этот тип действия является эффектом, генерируемым в фильмах и видеоиграх. Однако, создание такого эффекта для человека с использованием транспортных средств в демонстрации и/или аттракционе для катания может значительно усилить привлекательность аттракциона посредством обеспечения дополнительного визуально-стимулирующего опыта.
[0022] Технологии, обеспеченные в раскрытии сущности настоящего изобретения, обеспечивают управление транспортными средствами в реальном действии для обеспечения иллюзии управляемого по времени действия. В некоторых вариантах осуществления, множество транспортных средств могут испытывать действие переменных скоростей и изменений направлений при транспортировке через область вождения из динамически управляемых элементов сетки. Область вождения, включающая в себя такие элементы сетки, может называться «динамической областью вождения». Элементы сетки могут обеспечить возможность почти мгновенного замедления, вплоть до маневров под углом 360°, с управляемой скоростью, быстрое ускорение, и т.д. Область вождения может включать в себя многочисленные отверстия вдоль ее поверхности, где установлены элементы сетки. Каждый элемент сетки может включать в себя блок управления перемещением (например, колесо, линейную катушку, магнит), который приводится в действие в вертикальном направлении через отверстие, позиционируется в конкретном направлении и под конкретным углом, и управляется для обеспечения требуемой силы.
[0023] Аналитическая система может отслеживать информацию о транспортном средстве (например, скорость, размер, положение) и передавать эту информацию системе управления. Система управления может определить, какие элементы сетки следует привести в действие, и требуемые характеристики функционирования каждого элемента сетки для согласования требуемого специализированного маневра и/или эффекта транспортного средства на основе информации о транспортном средстве. Затем, система управления может предписать элементам сетки функционировать необходимым образом для управления транспортировкой транспортного средства через динамическую область вождения. В других вариантах осуществления, транспортное средство может использовать систему отслеживания положения для отправки его информации системе управления напрямую. Таким образом, ускоряющееся транспортное средство может быть переведено в управляемое перемещение, и может быть сделано так, чтобы казалось, словно оно перемещается в управляемом по времени действии, посредством использования элементов сетки в некоторых согласованных конфигурациях, для почти мгновенного замедления транспортного средства, выполнения маневра с управляемой меньшей скоростью, и быстрого ускорения до требуемой большей скорости. Как можно понять, полезные эффекты раскрытия сущности настоящего изобретения могут обеспечить аттракционы, которые являются более возбуждающими и увлекательными для зрителей и/или катающихся.
[0024] С учетом упомянутого выше, фиг. 1 иллюстрирует один вариант осуществления элемента 10 сетки. Элемент 10 сетки может частично проходить через поверхность 12 динамической области 13 вождения, которую транспортные средства проезжают в ходе демонстрации и/или аттракциона для катания. Многочисленные (например, десятки, сотни, тысячи) элементы 10 сетки могут быть установлены в качестве компонентов динамической области 13 вождения, в зависимости от природы спроектированной демонстрации и/или аттракциона для катания. Например, в некоторых вариантах осуществления, транспортное средство может само не приводить себя в движение при расположении в динамической области 13 вождения, и элементы 10 сетки могут быть ответственными за приведение в движение транспортного средства на протяжении всей демонстрации и/или аттракциона для катания. В таком сценарии, поверхность 12 может просто обеспечивать разделители между элементами 10 сетки или может быть полностью исключена, и элементы 10 сетки могут быть размещены плотно, для обеспечения динамической области 13 вождения. В других вариантах осуществления, транспортное средство может само приводить себя в движение на некоторых участках демонстрации и/или аттракциона для катания, но не на других участках, где выполняются специализированные маневры и/или эффекты, имитирующие управляемое по времени действие. На тех участках, на которых имитируется управляемое по времени действие, динамическая область 13 вождения может включать в себя элементы 10 сетки, требуемые для управления транспортировкой транспортного средства для выполнения маневра и/или эффекта, и может не включать в себя элементы 10 сетки в других областях.
[0025] В некоторых вариантах осуществления, элемент 10 сетки может включать в себя блок 14 управления перемещением, вал 16, двигатель 18, вертикальный исполнительный механизм 20, блок 22 конфигурирования направления, схемы 23 управления и связи, или некоторую их комбинацию. Блок 14 управления перемещением может включать в себя колесо, которое может вращаться вперед или назад с требуемой скоростью посредством вала 16 и двигателя 18, который представляет блок конфигурирования вращения, и в любом направлении, посредством блока 22 конфигурирования направления. А именно, блок конфигурирования вращения может быть выполнен с возможностью вращения блока 14 управления перемещением с угловой скоростью, а блок 22 конфигурирования направления может быть выполнен с возможностью поворота блока 14 управления перемещением с выравниванием с плоскостным направлением. Дополнительно, блок 14 управления перемещением может быть поднят или опущен вертикальным исполнительным механизмом 20, который может быть одним из электрического, гидравлического, пневматического, или подобного исполнительного механизма. Когда элементы 10 сетки не используются для маневра и/или эффекта, они могут быть опущены и скрыты ниже поверхности 12 вертикальным исполнительным механизмом 20. В некоторых вариантах осуществления, во время некоторых фаз функционирования, элементы 10 сетки согласованно выравниваются с поверхностью 12 и фиксируются на месте. Например, блок 14 управления перемещением может быть опущен таким образом, чтобы его самая верхняя часть была выровнена с поверхностью 12, и, затем, может быть зафиксирован на месте для того, чтобы служить, по существу, в качестве продолжения поверхности, по которой перемещаются транспортные средства. В вариантах осуществления, которые включают в себя плотно размещенные элементы 10 сетки (например, в вариантах осуществления без вещественной фиксированной поверхности 12), элементы 10 сетки могут фиксироваться на месте во время некоторых фаз функционирования, для согласованного действия в качестве фиксированной поверхности, которая позволяет транспортному средству увеличить на ней тяговое усилие. В других вариантах осуществления, вертикальный исполнительный механизм 20 исключен, и верхний участок блока 14 управления перемещением выравнивается с поверхностью 12 или, по существу, образует поверхность с другими плотно размещенными элементами 10 сетки.
[0026] Когда элемент 10 сетки принимает и/или исполняет команду от схем 23 управления и связи для приведения в действие и осуществления управления перемещением, вертикальный исполнительный механизм 20 может поднять блок 14 управления перемещением для мгновенного более высокого выставления (например, выше поверхности). Посредством этого, блок 14 управления перемещением будет контактировать с основанием транспортного средства (например, с колесами транспортного средства или с опорой основания) и вращаться в требуемом направлении и с требуемой скоростью для управления транспортировкой транспортного средства. Например, если самодвижущееся транспортное средство, которое приводится в движение вращением колес, едет поверх блока 14 управления перемещением, блок 14 управления перемещением может вращаться в направлении, противоположном направлению вращения колес транспортного средства, для создания эффекта испытательного стенда с беговыми барабанами. В качестве конкретного примера, такое транспортное средство может перемещаться с высокой величиной скорости, и блок 14 управления вместе с другими согласованными блоками управления могут отражать вращение колес транспортного средства таким образом, чтобы для наблюдателя транспортное средство казалось остановившимся при наезде на согласованные блоки 14 управления. После выполнения конкретным элементом 10 сетки или множеством элементов 10 сетки своей роли, вертикальный исполнительный механизм 20 может опустить блок 14 управления перемещением ниже поверхности 12, снова, до тех пор, пока не потребуется его дальнейшее использование. В некоторых вариантах осуществления, блок 14 управления может быть опущен до выравнивания с поверхностью и/или зафиксирован на месте, если он больше не используется для создания специальных эффектов для транспортного средства.
[0027] В других вариантах осуществления, блок 14 управления перемещением может включать в себя линейную катушку, которая принимает трехфазную электрическую мощность для генерации магнитного поля, в качестве части линейного асинхронного двигателя. Линейная катушка может быть поднята и опущена, подобным образом, с использованием вертикального исполнительного механизма 20, при необходимости. В этом варианте осуществления, транспортные средства, перемещающиеся по динамической области 13 вождения, будут включать в себя реактивные пластины, которые являются проводниками (например, лист алюминия), прикрепленные к нижней части транспортных средств. Когда транспортные средства перемещаются поверх поднятой катушки, принимающей электрическую мощность, реактивные пластины будут проходить через магнитное поле линейной катушки и будут генерировать свое собственное магнитное поле вследствие индуцированных вихревых токов. Эти два магнитных поля могут отталкиваться и/или притягиваться, что обусловливает ускорение или замедление транспортного средства.
[0028] В другом варианте осуществления, блок 14 управления перемещением может включать в себя линейную катушку, которая принимает трехфазную электрическую мощность для генерации магнитного поля, в качестве части линейного асинхронного двигателя. В этом варианте осуществления, транспортные средства, перемещающиеся по динамической области 13 вождения, будут включать в себя массив магнитов с полюсами разных знаков, прикрепленных к нижней части транспортных средств. Когда транспортные средства перемещаются поверх запитанной катушки, генерирующей магнитное поле, магниты могут отталкиваться и/или притягиваться на основе полярности, для ускорения или замедления транспортного средства.
[0029] Дополнительно, схемы 23 управления и связи могут принимать команды от системы управления или считывать команды, хранящиеся во внутренней памяти, для функционирования необходимым образом. В обоих случаях, команды могут включать в себя обеспечение вращения блока 14 управления перемещением с некоторой скоростью или, иначе, его приведение в действие (например, приведение в действие магнитного поля), для генерации перемещения в конкретном направлении. Например, двигатель 18 может поворачивать вал 16 для обеспечения некоторого количества оборотов в минуту (revolutions per minute - RPM) блока 14 (шины) управления перемещением для генерации требуемой скорости для транспортного средства относительно зрителя. Дополнительно, команды могут включать в себя этапы для позиционирования блока 14 управления перемещением в некотором направлении для управления траекторией транспортного средства. По существу, блок 22 конфигурирования направления, который может включать в себя шестерню 24 с зубцами или выступами, которая взаимодействует с другой линейной частью 26, включающей в себя зубцы или выступы, для передачи крутящего момента к элементу сетки и вращения его на 360°, при необходимости. Таким образом, блок 14 управления перемещением может быть повернут в любом плоскостном направлении посредством управления блоком 22 конфигурирования направления для изменения траектории перемещающегося транспортного средства.
[0030] Следует понимать, что конфигурирование множества элементов 10 сетки некоторым образом может обеспечить возможность очень точных маневров и/или настраиваемых эффектов. Например, колеса транспортного средства могут контактировать с приведенными в действие блоками 14 управления перемещением множества элементов 10 сетки, которые могут позиционироваться и вращаться некоторым образом для управления всеми четырьмя колесами транспортного средства, посредством поворота их по точно управляемой окружности на 360°. Также, в некоторых вариантах осуществления, множество поднятых блоков 14 управления перемещением могут быстро вращаться в обратном направлении таким образом, чтобы, при контакте транспортного средства, перемещающегося с относительно высокой скоростью (например, 60 миль в час (mph)), с поднятыми блоками 14 управления перемещением, транспортное средство замедлялось до требуемой скорости (например, 5 mph) почти мгновенно. Транспортное средство может, тогда, транспортироваться в любом требуемом направлении с уменьшенной скоростью, поскольку колеса транспортного средства транспортируются от одного множества блоков 14 управления перемещением к другому. Блоки 14 управления перемещением могут управляться таким образом, чтобы они учитывали скорость вращения колес транспортного средства для достижения этого эффекта. Это может создавать впечатление, что транспортное средство перемещается в управляемом по времени действии. После завершения требуемого маневра, транспортное средство может транспортироваться на блоки 14 управления перемещением, выполненные с возможностью ускорения автомобиля обратно до его начальной скорости (60 mph) или любой скорости, и транспортное средство может уехать прочь. В некоторых вариантах осуществления, транспортное средство может транспортироваться на фиксированную поверхность, или блоки 14 управления перемещением могут быть зафиксированы на месте, таким образом, чтобы транспортное средство могло перемещаться снова под своим собственным управлением. Следует понимать, что могут одновременно существовать множественные транспортные средства, перемещающиеся по динамической области 13 вождения под управлением элементов 10 сетки. Действительно, раскрытые технологии обеспечивают увлекательные автомобильные погони, гонки, «петушиные дуэли», и другие сценарии, отображаемые в демонстрации и/или испытываемые в аттракционе для катания.
[0031] В другом варианте осуществления, элементы 10 сетки могут взаимодействовать с листом 28 шарикоподшипников 30, лежащим поверх поверхности 12, как показано на фиг. 2. Шарикоподшипники 30 могут управляться блоком 14 управления перемещением, поднятым вертикальным исполнительным механизмом 20, давящим на лист 28 и вращающимся с требуемой скоростью и/или в требуемом направлении, что обусловит, в свою очередь, зацепление и вращение шарикоподшипников 30. В некоторых случаях, шарикоподшипники 30 могут быть зафиксированы на месте блоком 14 управления перемещением, давящим на лист 28 и остающимся стационарным. В одном варианте осуществления, транспортное средство может транспортироваться по листу 28 необходимым образом посредством конфигурирования перемещений шарикоподшипников 30, которые контактируют с шинами транспортного средства. Например, перемещения (например, направление, скорость) шарикоподшипников 30 могут быть сконфигурированы сцеплением с блоком 14 управления перемещением, и перемещения шарикоподшипников могут действовать на колеса транспортного средства, которые сцеплены с шарикоподшипниками 30, для обусловливания выполнения транспортным средством специализированных маневров и/или эффектов, таких как управляемое по времени действие. Элемент 10 сетки может управляться командами, принятыми от системы управления или хранящимися локально в памяти, и исполняемыми схемами 23 управления и связи. Дополнительно, вследствие того факта, что лист 28 покрывает блок 14 управления перемещением и отверстие, из которого блок 14 управления перемещением выступает, зрительская аудитория и/или посетители аттракциона для катания могут не замечать выпуклости на поверхности 12, что может усилить впечатление того, что транспортное средство само выполняет маневр и/или эффект.
[0032] Фиг. 3А иллюстрирует систему, управляющую транспортировкой одного транспортного средства, а фиг. 3В иллюстрирует систему, управляющую транспортировкой более одного транспортного средства. Начиная с фиг. 3А, показано, что система управляет перемещением транспортного средства 32 посредством маневра в управляемом по времени действии. Система может включать в себя элементы 10 сетки, датчик 36, аналитическую систему 37 с одним или несколькими процессорами и материальными машиночитаемыми запоминающими устройствами (например, накопителем на жестких дисках), и систему 38 управления с одним или несколькими процессорами и материальными машиночитаемыми запоминающими устройствами (например, накопителем на жестких дисках). Элементы 10 сетки могут быть установлены в отверстиях 34 или плотно размещены на всем протяжении динамической области 13 вождения, как обсуждалось выше. Фиг. 3А и 3В являются схематичными представлениями и следует отметить, что элементы 10 сетки могут быть расположены только на динамическом участке динамической области 13 вождения, таким образом, чтобы существовали отдельные динамические и нединамические участки динамической области 13 вождения. Датчик 36, который может представлять единственный воспринимающий блок или множество датчиков, может получать информацию о транспортном средстве (например, скорость, скорость вращения шин) для аналитической системы 37. В некоторых вариантах осуществления, датчик 36 может включать в себя оптическую систему, которая использует камеру и/или лазеры для отслеживания одного или нескольких транспортных средств и определения информации о транспортном средстве. Информация о транспортном средстве может включать в себя скорость, размер, ускорение, и положение (например, угловое) транспортного средства. Информация о размере для транспортного средства 32 может включать в себя вес, длину, ширину, высоту, и т.д., транспортного средства. Аналитическая система 37 может быть контрольным устройством, включающим в себя один или несколько процессоров, выполненных с возможностью предписывать датчику 36 отслеживать информацию о транспортном средстве и отдавать команды схемам связи на передачу информации о транспортном средстве системе 38 управления, если аналитическая система 37 и система 38 управления являются разделенными. Затем, аналитическая система 37 может передать информацию о транспортном средстве системе 38 управления.
[0033] Система 38 управления, которая может включать в себя контроллер автоматики (например, программируемый логический контроллер), может быть выполнена с возможностью приема информации о транспортном средстве в качестве входных данных и определения, какие элементы 10 сетки следует привести в действие, и требуемых характеристик функционирования этих элементов 10 сетки. По существу, система 38 управления может быть выполнена с возможностью понимания траектории, скорости, и ускорения, при анализе информации о транспортном средстве для выполнения этих определений. Дополнительно, система 38 управления может использовать входные данные для определения того, под каким углом следует располагать элементы 10 сетки для позиционирования транспортного средства на всем протяжении маневра. Затем, система 38 управления может выдать команды для приведения в действие элементов 10 сетки и их функционирования определенным образом. Как показано, выбранные элементы 10 сетки могут принять выданные команды и могут быть приведены в действие системой 38 управления в нужные моменты времени для транспортировки транспортного средства 32 в управляемом маневре с вращением на 180° с требуемой скоростью. Следует отметить, что система управления может быть выполнена с возможностью независимого управления некоторыми из элементов 10 сетки и/или совместного управления другими элементами 10 сетки как набором.
[0034] Для дополнительной иллюстрации, фиг. 3В показывает транспортировку более одного транспортного средства, управляемую на всем протяжении динамической области 13 вождения системой, описанной выше. Как показано, первое транспортное средство 32 и второе транспортное средство 42 вовлечены в сценарий «петушиной дуэли» в автомобильной демонстрации. Дополнительно или альтернативно, транспортные средства 32 и 42 могут управляться посетителями в аттракционе для катания типа «сталкивающиеся автомобили» или «гонки на выживание». В показанном сценарии, транспортные средства 32 и 42 могут мчаться друг на друга, что создает напряжение в зрительской аудитории. Датчик 36 может отслеживать информацию о транспортных средствах, такую как размер, скорость, ускорение, положение, и т.д., а аналитическая система 37 может передавать эту информацию системе 38 управления. Система 38 управления может определить, что транспортные средства 32 и 42 достигли некоторого расстояния друг относительно друга, которое инициирует согласованный обходной маневр в управляемом по времени действии. По существу, в начальный момент (t1) времени, система 38 управления может отправить команды, чтобы выбранные элементы 32 сетки были приведены в действие и почти мгновенно замедлили транспортные средства 32 и 42, направить каждое транспортное средство 32 и 42 в синхронизированный, управляемый замедленный левый поворот друг относительно друга в последующий момент (t2) времени. Элементы 10 сетки могут продолжать транспортировку транспортных средств 32 и 42 в управляемом повороте до тех пор, пока они не развернутся на 180° относительно своих начальных точек. Затем, элементы 10 сетки, расположенные в этих точках, могут быть выполнены с возможностью ускорения транспортных средств задним ходом в стороны друг от друга с высокой скоростью. В результате, наблюдающие зрители и/или посетители, катающиеся в транспортных средствах, могут получить волнующий опыт.
[0035] Для лучшего понимания размеров элементов 10 сетки, установленных в отверстиях 34 вдоль поверхности 12 динамической области 13 вождения, согласно некоторым вариантам осуществления, фиг. 4А и 4В иллюстрируют вид сверху и вид сбоку, соответственно, элементов сетки относительно колеса 44 транспортного средства 32. Следует отметить, что показанные размеры не являются точными и используются в качестве аппроксимаций в целях объяснения. Начиная с фиг. 4А, отверстия 34 в поверхности 12 являются меньшими, чем длина и ширина участка колеса 44, который контактирует с поверхностью 12 (называемого здесь «пятном контакта колеса»). Это может предотвратить падение колеса 44 в отверстие 34 и застревание в нем. В общем, отверстия 34 могут быть достаточно малыми, чтобы по меньшей мере более одного из них покрывались пятном контакта колеса, когда транспортное средство едет по поверхности 12. Гранулярностью управления перемещением транспортного средства можно более точно управлять при наличии большего количества элементов 10 сетки, взаимодействующих с пятном контакта колеса, в любой данной точке на поверхности 12 динамической области 13 вождения.
[0036] Со ссылкой на фиг. 4В, как можно увидеть на виде сбоку, колесо 44 транспортного средства 32 может взаимодействовать по меньшей мере с двумя элементами 10 сетки, когда транспортное средство 32 проезжает по ним. В этой иллюстрации, элементы 10 сетки сконфигурированы таким образом, чтобы они постепенно обеспечивали левый поворот, посредством поворота среднего элемента 10 сетки влево на малый угол и поворота самого правого элемента сетки влево на больший угол. Когда пятно контакта колеса взаимодействует с самым левым и средним элементами 10 сетки, оно начинает двигаться под углом влево, и, когда шина 44 продолжает транспортироваться для взаимодействия со средним и самым правым элементами 10 сетки, она начинает двигаться под углом влево более резко. Таким образом, размер элементов 10 сетки может влиять на точность маневра и/или эффекта. Действительно, некоторые отверстия 34 и соответствующие им элементы 10 сетки могут изменяться в размере на всем протяжении поверхности 12 динамической области 13 вождения в зависимости от проектных требований для данного маневра и/или эффекта. Например, в некоторых вариантах осуществления, может быть необходимым использование элементов 10 сетки, которые имеют, приближенно, тот же самый размер, что и пятно контакта колеса, на участках динамической области 13 вождения, где предполагается быстрое замедление или ускорение транспортного средства. Дополнительно, в некоторых вариантах осуществления, может быть необходимым использование многих очень малых элементов 10 сетки, которые взаимодействуют с пятном контакта колеса, для увеличения гранулярности и управления маневрами и/или эффектами, которые имеют узкоспециализированные элементы поворотов. В других вариантах осуществления, элементы 10 сетки могут быть однородными по размеру на всем протяжении динамической области 13 вождения.
[0037] В другом варианте осуществления, как показано на фиг. 5, элемент 10 сетки может быть приведен в действие в вертикальном направлении через прорезь в круглом участке 44, установленном в динамической области 13 вождения. Как показано, круглый участок 44 может вращаться в любом направлении таким образом, чтобы блок 14 управления перемещением мог позиционироваться необходимым образом блоком 22 конфигурирования направления. Более конкретно, круглый участок 44 поверхности 12 выполнен с возможностью вращения в плоскостном направлении вместе с блоком 14 управления перемещением, а блок конфигурирования вращения выполнен с возможностью вращения блока управления перемещением относительно оси, по существу, перпендикулярной плоскостному направлению. Дополнительно, прорезь 43, из которой выступает блок 14 управления перемещением, может быть прямоугольной по форме. По существу, прорезь 43 может быть меньшей по размеру, чем круглое отверстие, поскольку она включает в себя уменьшенную ширину. Таким образом, динамическая область 13 вождения, которая включает в себя этот вариант осуществления элемента 10 сетки, может включать в себя большую поверхность 12, по которой осуществляется езда, поскольку отверстия имеют меньший размер. В свою очередь, это может уменьшить вероятность застревания колеса транспортного средства в отверстии, когда блок 14 управления перемещением убран.
[0038] Дополнительно, в другом варианте осуществления, элементы 10 сетки могут быть рассеяны по участку площадки выполнения маневров динамической области 13 вождения. Такой участок площадки может соответствовать всей динамической области 13 вождения в пределах нединамической области вождения или только участку динамической области 13 вождения. Упомянутый участок площадки может быть выполнен с возможностью перемещения относительно одного или нескольких других участков области вождения (например, отдельной динамической и/или нединамической области). Например, упомянутый участок площадки может быть круглым и может быть выполнен с возможностью вращения в плоскостном направлении и с требуемой скоростью. Таким образом, когда транспортное средство перемещается по упомянутому участку площадки и подвергается воздействию эффекта испытательного стенда с беговыми барабанами, обусловленному взаимодействием элементов сетки с транспортным средством, может казаться, что оно полностью остановилось и, затем, повернулось на упомянутом участке площадки для имитации замедленного вращения. Может существовать несколько участков площадок с элементами 10 сетки, расположенных на всем протяжении динамической области 13 вождения. Каждый участок площадки может предписывать множеству транспортных средств выполнить один или несколько маневров, таких как управляемое по времени действие. В некоторых вариантах осуществления, элементы 10 сетки могут быть установлены только на одном или нескольких участках площадки. Таким образом, транспортное средство может включать в себя одно или несколько колес, приводимых в действие двигателем, и т.п., и транспортное средство может самостоятельно перемещаться через некоторые участки области вождения. При перемещении транспортного средства, аналитическая система 37 может контролировать положение транспортного средства, угловую скорость и плоскостное направление одного или нескольких ведомых колес посредством использования датчика 36. Аналитическая система может отправить эту информацию системе 38 управления, которая может определить, какие элементы 10 сетки следует привести в действие, на основе положения транспортного средства, и скорости ведомого колеса, когда транспортное средство приближается к некоторой площадке, и на основе требуемого действия, инициируемым участком площадки (динамической областью выполнения маневров).
[0039] Для создания эффекта, такого как управляемое по времени действие, система 38 управления может отправить команды к выбранным элементам 10 сетки для вращения их блоков 14 управления перемещением с той же самой угловой скоростью и в том же самом плоскостном направлении, что и у приближающегося ведомого колеса транспортного средства. Это может создать эффект испытательного стенда с беговыми барабанами, когда ведомое колесо сцепляется с блоком управления перемещением, и одному или нескольким ведомым колесам обеспечивается возможность продолжения вращения, но, по существу, они остаются на месте. В некоторых вариантах осуществления, самые дальние элементы 10 сетки могут управляться таким образом, чтобы они вращались с меньшей скоростью, чем ведомое колесо транспортного средства, а скорость элементов 10 сетки, более близких к центру круглой площадки, может инкрементально увеличиваться. Таким образом, инерция движения транспортного средства может преодолеть скорость начальных элементов сетки, так что транспортное средство продолжит перемещаться до тех пор, пока весь его корпус не будет расположен на площадке. Дополнительно, инкрементальное увеличение скорости элементов 10 сетки к центру площадки может привести к остановке транспортного средства более управляемым способом. После того, как ведомое колесо будет вращаться на месте на одном или нескольких блоках 14 управления перемещением сцепленных элементов 10 сетки, круглая площадка может поворачиваться в плоскостном направлении с требуемой скоростью для создания впечатления, что транспортное средство выполняет маневр (например, вплоть до поворота на 360°) в замедленном движении (например, управляемое по времени действие). После завершения транспортным средством требуемого маневра, транспортное средство может уехать прочь или может продвинуться за пределы площадки и возобновить нормальное функционирование, посредством изменения направления вращения блока управления перемещением или опускания его ниже поверхности, или посредством изменения направления вращения ведомого колеса.
[0040] Обратимся теперь к фиг. 6, которая является блок-схемой последовательности операций способа 50 для управления транспортировкой транспортного средства, с использованием аналитической системы. Способ 500 может включать в себя отслеживание аналитической системой информации о транспортном средстве (этап 52 способа), отправку аналитической системой информации о транспортном средстве системе управления (этап 54 способа), определение системой управления, какие элементы сетки следует привести в действие (этап 56 способа), определение системой управления требуемых характеристик функционирования элементов сетки (этап 58 способа), и приведение в действие системой управления элементов сетки определенным образом (этап 60 способа). Этот способ 50 может функционировать в некотором цикле для непрерывной настройки измеренных характеристик функционирования. Более конкретно, на этапе 52 способа, аналитическая система может непрерывно отслеживать некоторую информацию о транспортном средстве, когда транспортные средства проезжают по динамической области вождения, с использованием оптической системы. Оптическая система может включать в себя датчик, такой как камера, который отслеживает положение, скорость, ускорение, размер, и т.д., транспортных средств. Некоторые данные из этой информации (например, размер транспортного средства) могут быть заранее заданными и назначенными в соответствии с конкретным идентификатором для транспортного средства, который датчик может детектировать. После приобретения аналитической системой информации о транспортном средстве, она может отправить информацию о транспортном средстве системе управления (этап 54 способа). Таким образом, аналитическая система и система управления могут быть соединены с возможностью связи через беспроводную сеть, проводную сеть, или некоторую их комбинацию. В некоторых вариантах осуществления, аналитическая система и система управления могут содержаться в качестве компонентов в одном объединенном блоке. Дополнительно, в других вариантах осуществления, могут существовать многочисленные аналитические системы, каждая из которых имеет свою собственную отдельную систему управления, которая может управлять некоторыми элементами сетки. В других вариантах осуществления, каждая из многочисленных аналитических систем может обмениваться данными с центральной системой управления, которая управляет всеми элементами сетки в динамической области вождения.
[0041] Система управления может принимать информацию о транспортном средстве в качестве входных данных, при определении, какие элементы сетки следует привести в действие для выполнения требуемого маневра и/или эффекта на всем протяжении динамической области вождения (этап 56 способа). Система управления может выбрать многочисленные элементы сетки для приведения в действие, для обеспечения требуемого маневра и/или эффекта, и она может динамически согласовывать, какие элементы сетки следует приводить в действие, когда транспортное средство перемещается по динамической области вождения. Это может быть полезным для демонстраций и/или аттракционов для катания, где транспортное средство может самостоятельно перемещаться через динамическую область вождения, и транспортное средство не следует по установленной траектории. Система управления может использовать информацию о транспортном средстве, такую как данные о положении, для определения того, где транспортное средство находится в динамической области вождения в любой данный момент времени. Дополнительно, система управления может использовать скорость транспортного средства для определения того, насколько быстро транспортное средство может прибыть на некоторый участок динамической области вождения. В результате, система управления может заранее планировать управление транспортным средством, посредством выбора элементов сетки для приведения в действие, которые лежат на спроектированной траектории транспортного средства, в нужный момент времени. В нужный момент времени, вертикальные исполнительные механизмы элементов сетки могут поднять блоки управления перемещением из соответствующих им отверстий выше поверхности для взаимодействия с шинами транспортного средства.
[0042] Дополнительно, система управления может определить требуемые характеристики функционирования выбранных элементов сетки (этап 58 способа). Это может включать в себя определение направления, в котором, по предписанию блока конфигурирования вращения, блок управления перемещением каждого элемента сетки должен приложить силу к транспортному средству (в прямом или обратном направлении), скорости, с которой, по предписанию блока конфигурирования вращения, должен перемещаться блок управления перемещением (например, угловой скорости для вращения колеса, напряженности магнитного поля), угла, под которым должен позиционироваться блок управления перемещением (например, плоскостного направления), посредством блока конфигурирования направления, для управления направлением перемещения транспортного средства необходимым образом, и т.д. После определения системой управления, какие элементы сетки следует привести в действие (этап 56 способа), и требуемых характеристик функционирования каждого элемента сетки (этап 58 способа), система управления может привести в действие выбранные элементы сетки определенным образом (этап 60 способа). В некоторых вариантах осуществления, система управления может отправлять команды каждому элементу сетки, которые могут включать в себя информацию о синхронизации, угловом положении, скорости, и направлении силы (например, прямом или обратном). Когда транспортное средство приближается, элементы сетки могут быть приведены в действие в согласованной последовательности для выполнения требуемого маневра и/или эффекта, такого как управляемое по времени действие. Следует отметить, что в одном варианте осуществления, система управления может обмениваться данными с транспортным средством напрямую, для ограничения права управления водителя перед тем, как транспортное средство входит в контакт с приведенными в действие элементами сетки, или как только это происходит. Таким образом, перемещением транспортного средства управляют элементы сетки, а не водитель, во время специализированных маневров и/или эффектов.
[0043] В другом варианте осуществления, система может управлять транспортировкой транспортного средства через динамическую область вождения на основе предопределенного программирования. Другими словами, транспортировкой транспортного средства пассивно управляют на всем протяжении динамической области вождения, в которой заданы характеристики функционирования элементов сетки. В этом варианте осуществления, динамическая область вождения может включать в себя множественные элементы сетки на всем протяжении участков демонстрации и/или аттракциона для катания, где транспортное средство будет перемещаться. Синхронизация приведения в действие элементов сетки, угол плоскостного положения, скорость (например, скорость вращения), и направление силы (например, прямое или обратное), могут быть заранее заданы и запомнены в памяти системы управления или в памяти, внутренней по отношению к элементам сетки. По существу, транспортные средства помещаются в динамическую область вождения, и элементы сетки приводятся в действие, по командам, в соответствующие моменты времени, для перемещения транспортных средств по динамической области вождения. Это может быть выполнено согласованно с отдельными средствами приведения в движение транспортного средства или с использованием только элементов сетки. В одном варианте осуществления, транспортные средства могут быть неспособными приводить себя в движение сами, и водители и/или посетители могут располагаться в транспортных средствах, для создания впечатления того, что автомобиль управляется человеком. Например, для создания эффекта управляемого по времени действия с использованием пассивного варианта осуществления, некоторые элементы сетки могут ускорить фиктивное транспортное средство вплоть до некоторой скорости (например, 60 mph) посредством приложения силы в прямом направлении, почти мгновенно замедлить транспортное средство до требуемой скорости (например, 10 mph) посредством приложения силы в обратном направлении, управлять транспортным средством посредством маневра (например, с вращательным движением вплоть до 360°) посредством синхронного установления под углом блоков управления перемещением, и быстро ускорить транспортное средство посредством приложения силы в прямом направлении.
[0044] Другая блок-схема последовательности операций, описывающая один вариант осуществления способа 70 для управления транспортировкой транспортного средства с использованием системы отслеживания положения, показана на фиг. 7. Способ 70, который может быть реализован в виде непрерывного цикла управления, может включать в себя отслеживание транспортным средством своей информации о транспортном средстве (этап 72 способа), отправку транспортным средством информации о транспортном средстве системе управления (этап 74 способа), определение системой управления, какие элементы сетки следует привести в действие для требуеого маневра и/или эффекта (этап 76 способа), определение системой управления требуемых характеристик функционирования выбранных элементов сетки (этап 78 способа), и приведение в действие системой управления элементов сетки необходимым образом (этап 80 способа). Более конкретно, на этапе 72 способа, транспортное средство может отслеживать некоторую информацию с использованием системы отслеживания положения. В некоторых вариантах осуществления, система отслеживания положения может включать в себя передатчики, такие как RFID-передатчики, которые обеспечивают сигналы для системы управления, и которые могут быть использованы для определения информации о положении. В других вариантах осуществления, система отслеживания положения может включать в себя лазеры, излучение которых попадает на датчики, расположенные на всем протяжении области вождения, для определения информации о положении (например, угловой скорости). Дополнительно, транспортное средство может включать в себя внутреннее контрольное устройство (например, компьютер с одним или несколькими процессорами), которое отслеживает скорость и ускорение транспортного средства, и материальное машиночитаемое запоминающее устройство (например, накопитель на жестких дисках), которое запоминает размеры транспортного средства.
[0045] Затем, на этапе 74 способа, транспортное средство может использовать модуль связи для отправки информации о транспортном средстве системе управления. Таким образом, в некоторых вариантах осуществления, транспортное средство и система управления могут иметь прямую связь друг с другом. Система управления может быть выполнена с возможностью приема информации о транспортном средстве от транспортного средства, которая может включать в себя скорость, размер, положение, ускорение, и т.д., транспортного средства, и определения, какие элементы сетки следует привести в действие для требуемого маневра и/или эффекта (этап 76 способа), такого как управляемое по времени действие, на основе информации о транспортном средстве.
[0046] Дополнительно, система управления может определить требуемые характеристики функционирования выбранных элементов сетки (этап 78 способа). Это может включать в себя определение направления, в котором, по предписанию блока конфигурирования вращения, блок управления перемещением каждого элемента сетки должен приложить силу к транспортному средству (в прямом или обратном направлении), скорости, с которой, по предписанию блока конфигурирования вращения, должен перемещаться блок управления перемещением (например, скорости для вращения шины, напряженности магнитного поля), угла плоскостного положения, под которым, по предписанию блока конфигурирования направления, должен позиционироваться блок управления перемещением для управления направлением перемещения транспортного средства необходимым образом, и т.д. После определения системой управления, какие элементы сетки следует привести в действие (этап 76 способа), и требуемых характеристик функционирования каждого элемента сетки (этап 78 способа), система управления может привести в действие выбранные элементы сетки определенным образом (этап 80 способа). В некоторых вариантах осуществления, система управления может отправлять команды каждому элементу сетки, которые могут включать в себя информацию о синхронизации, угловом положении, скорости, и направлении силы (например, прямом или обратном). Когда транспортное средство приближается к некоторому активному участку динамической области вождения, соответствующие элементы сетки могут быть приведены в действие в согласованной последовательности для выполнения требуемого маневра и/или эффекта, такого как управляемое по времени действие. В одном варианте осуществления, система управления может обмениваться данными с транспортным средством для ограничения права управления водителя перед тем, как транспортное средство входит в контакт с приведенными в действие элементами сетки, или как только это происходит. Таким образом, перемещением транспортного средства управляют элементы сетки, а не водитель, во время специализированных маневров и/или эффектов.
[0047] Как описано выше со ссылкой на фиг. 6, в некоторых вариантах осуществления, определение того, какие элементы сетки следует привести в действие, и их характеристик функционирования, может быть активным в отношении того, что система управления выбирает, какие элементы сетки следует привести в действие, и как они должны функционировать, почти в реальном времени, на основе того, где расположено транспортное средство в динамической области вождения, насколько быстро перемещается транспортное средство, требуемого маневра для выполнения, и т.д. В других вариантах осуществления, определение того, какие элементы сетки следует привести в действие и как они должны функционировать, может быть пассивным в отношении того, что эти определения и характеристики функционирования являются заранее заданными в системе управления или элементах сетки, и транспортное средство может транспортироваться по заданному маршруту.
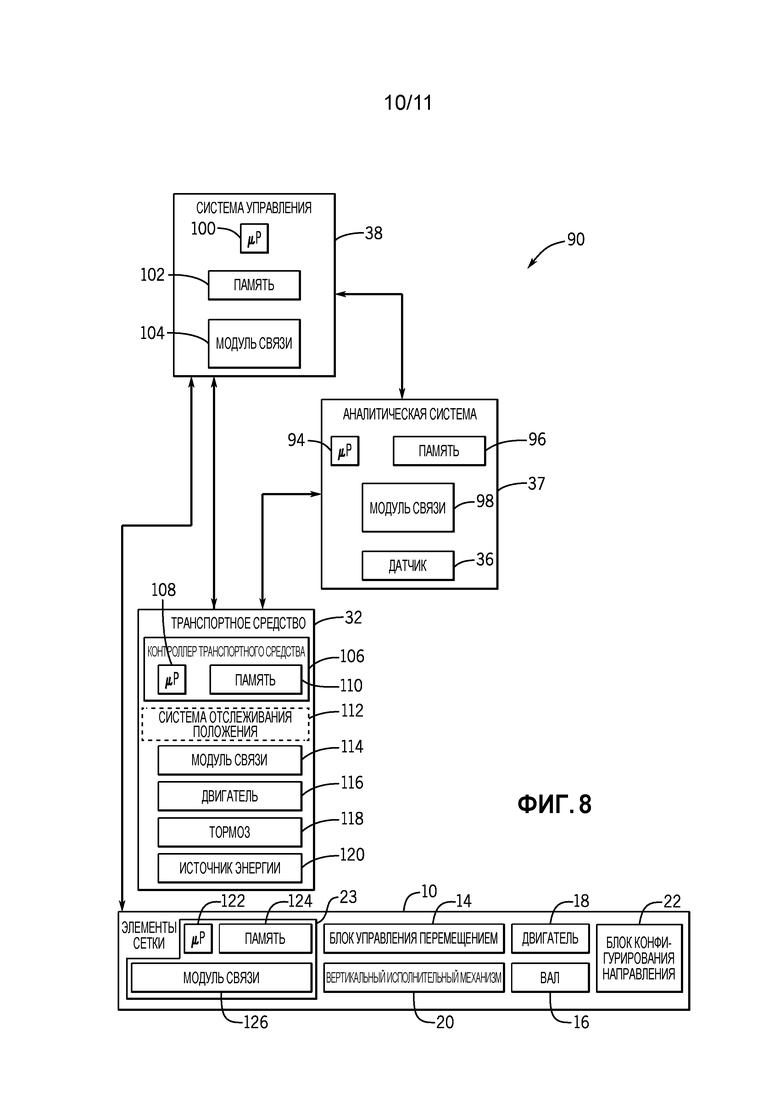
[0048] Блок-схема системы 90, выполненной с возможностью выполнения способа фиг. 6 и 7, показана на фиг. 8. Система 90 может включать в себя элементы 10 сетки, аналитическую систему 37, и систему 38 управления. Как описано выше, система 90 может быть выполнена с возможностью управления транспортировкой транспортного средства 32 на всем протяжении динамической области вождения, где установлены элементы 10 сетки. Действительно, система 90 может предписывать транспортному средству 32 выполнять специализированные маневры и/или эффекты, такие как управляемое по времени действие. Аналитическая система 37, система 38 управления, и элементы 10 сетки могут включать в себя различные компоненты для обеспечения транспортному средству 32 возможности выполнения специализированных маневров и/или эффектов. В некоторых вариантах осуществления, каждый элемент 10 сетки может управляться отдельно или управляться как набор. Подобным образом, транспортное средство 32 может включать в себя компоненты, которые обеспечивают возможность управления им необходимым образом.
[0049] Аналитическая система 37 может включать в себя процессор 94, память 96, модуль 98 связи, и датчик 36. Процессор 94, который может представлять один или несколько процессоров, может быть компьютерным процессором или микропроцессором любого типа, способным исполнять исполняемый компьютером код. Память 96, которая может представлять один или несколько компонентов памяти, может быть любыми подходящими изделиями, которые могут служить в качестве носителей для хранения исполняемого процессором кода, данных, и т.п. Эти изделия могут представлять материальные, непереходные машиночитаемые носители (например, любую подходящую форму материальной памяти или запоминающего устройства), которые могут запоминать исполняемый процессором код, используемый процессором 94 для выполнения технологий, раскрытых в настоящем изобретении. Память 96 может быть также использована для хранения информации о транспортном средстве, приобретаемой датчиком 36. Модуль 98 связи может быть беспроводным или проводным компонентом связи, который может обеспечить связь между аналитической системой 37 и системой 38 управления. По существу, модуль 98 связи может включать в себя беспроводную карту или порт данных (например, Ethernet), способные передавать или принимать данные. Датчик 36 может включать в себя оптическую систему, которая использует камеру для отслеживания некоторой информации о транспортном средстве.
[0050] Система 38 управления может включать в себя процессор 100, память 102, и модуль 104 связи. Процессор 100, который может представлять один или несколько процессоров, может быть компьютерным процессором или микропроцессором любого типа, способным исполнять исполняемый компьютером код. Память 102, которая может представлять один или несколько компонентов памяти, может быть любыми подходящими изделиями, которые могут служить в качестве носителей для хранения исполняемого процессором кода, данных, и т.п. Эти изделия могут представлять материальные, непереходные машиночитаемые носители (например, любую подходящую форму материальной памяти или запоминающего устройства), которые могут запоминать исполняемый процессором код, используемый процессором 100 для выполнения технологий, раскрытых в настоящем изобретении, таких как определение того, какие элементы сетки следует привести в действие, и как они должны функционировать. Память 102 может быть также использована для хранения информации о транспортном средстве, принимаемой от аналитической системы 37. Модуль 104 связи может быть беспроводным или проводным компонентом связи, который может обеспечить связь с аналитической системой 37, транспортным средством 32, и элементами 10 сетки. По существу, модуль 104 связи может включать в себя беспроводную карту или порт данных (например, Ethernet), способные передавать или принимать данные. Например, после выполнения упомянутых определений, процессор 100 может предписать модулю 104 связи отправить команды (например, информацию о синхронизации приведения в действие, направлении силы, величине прикладываемой силы, угловом направлении) к выбранным подмножествам отдельных элементов 10 сетки.
[0051] Транспортное средство 32 может включать в себя контроллер 106 транспортного средства, который может включать в себя процессор 108 и память 110, систему 112 отслеживания положения, модуль 114 связи, двигатель 116, тормоз 118, и источник 120 энергии. Процессор 108, который может представлять один или несколько процессоров, может быть компьютерным процессором или микропроцессором любого типа, способным исполнять исполняемый компьютером код. Память 110, которая может представлять один или несколько компонентов памяти, может быть любыми подходящими изделиями, которые могут служить в качестве носителей для хранения исполняемого процессором кода, данных, и т.п. Эти изделия могут представлять материальные, непереходные машиночитаемые носители (например, любую подходящую форму материальной памяти или запоминающего устройства), которые могут запоминать исполняемый процессором код, используемый процессором 108 для выполнения технологий, раскрытых в настоящем изобретении, таких как блокирование водительского управления транспортным средством, по команде системы 38 управления. В некоторых вариантах осуществления, память 110 может быть также использована для хранения информации о транспортном средстве, такой как размерные величины (например, вес, длина, ширина, высота), скорость, ускорение, и т.д. Модуль 114 связи может быть беспроводным компонентом связи, который может обеспечить связь с системой 38 управления. По существу, модуль 114 связи может включать в себя беспроводную карту, способную передавать или принимать данные. Например, процессор 100 может предписать модулю 114 связи отправить информацию о транспортном средстве системе 38 управления таким образом, чтобы система 38 управления могла определить, какие элементы сетки следует привести в действие, и как они должны функционировать.
[0052] Для обеспечения перемещений транспортного средства 32, транспортное средство 32 включает в себя двигатель 116 и тормоз 118. Перемещения транспортного средства 32 могут включать в себя ускорение, замедление, поворот, и остановку транспортного средства 32. Двигатель 116 может быть запитан любым подходящим источником 120 энергии, включающим в себя, но не ограниченным этим, аккумуляторную батарею, панель солнечных элементов, электрический генератор, газовый двигатель, или любую их комбинацию. В вариантах осуществления, где обеспечена возможность водительского управления транспортным средством, операциями двигателя 116 и тормоза 118 может управлять контроллер 106 транспортного средства. Например, контроллер 106 транспортного средства может управлять двигателем 116 для настройки его выходной мощности для ускорения или замедления транспортного средства 32. Контроллер 106 транспортного средства может также управлять тормозом 118 для замедления или остановки транспортного средства 32. Дополнительно, контроллер 106 транспортного средства может функционировать по командам от водителя через операторский интерфейс или от системы 38 управления, которая может переопределять команды водителя (например, посредством выключения водительского управления после сцепления с элементами сетки).
[0053] Система 112 отслеживания положения может контролировать положение транспортного средства в динамической области вождения. В одном варианте осуществления, система 112 отслеживания положения взаимодействует с датчиками в динамической области вождения. Каждый датчик представляет уникальное местоположение (например, координаты относительно одной или нескольких опорных точек) в динамической области вождения. В таком варианте осуществления, система 112 отслеживания положения транспортного средства включает в себя средство считывания, которое может воспринимать идентификатор, связанный с транспортным средством или конкретным участком транспортного средства (например, передним, правым бампером), для обеспечения информации о положении транспортного средства 32. Средство считывания может затем передать информацию о положении системе 38 управления, которая, в свою очередь, определяет, какие элементы 10 сетки следует привести в действие, и как каждый из них должен функционировать для выполнения требуемого маневра и/или эффекта. Как упомянуто выше, в некоторых вариантах осуществления, система 112 отслеживания положения может включать в себя RFID-метки и/или облучающие лазеры для обеспечения и/или приобретения информации о положении. В вариантах осуществления, где аналитическая система 37 отслеживает информацию о транспортном средстве с использованием датчика 36, транспортные средства 32 могут не включать в себя систему 112 отслеживания положения.
[0054] Элементы 10 сетки могут включать в себя схемы 23 управления и связи (процессор 122, память 124, и модуль 126 связи), блок 14 управления перемещением, вал 16, двигатель 18, вертикальный исполнительный механизм 20, блок 22 конфигурирования направления, или некоторую их комбинацию. Процессор 122, который может представлять один или несколько процессоров, может быть компьютерным процессором или микропроцессором любого типа, способным исполнять исполняемый компьютером код. Память 124, которая может представлять один или несколько компонентов памяти, может быть любыми подходящими изделиями, которые могут служить в качестве носителей для хранения исполняемого процессором кода, данных, и т.п. Эти изделия могут представлять материальные, непереходные машиночитаемые носители (например, любую подходящую форму материальной памяти или запоминающего устройства), которые могут запоминать исполняемый процессором код, используемый процессором 122 для выполнения технологий, раскрытых в настоящем изобретении. Например, в вариантах осуществления, где элементы 10 сетки заранее заданы для управления без команд от системы 38 управления, исполняемый процессором код может включать в себя команды, связанные с тем, когда следует выполнить приведение в действие в вертикальном направлении, в каком направлении следует приложить силу, силу какой величины следует приложить (например, скорость или напряженность магнитного поля), под каким углом следует обеспечить позиционирование, и т.д. Дополнительно или альтернативно, в вариантах осуществления, где элементы 10 сетки выполнены с возможностью приема команд от системы 38 управления, исполняемый процессором код может включать в себя команды, связанные с приемом, проверкой допустимости, и/или исполнением команд.
[0055] Модуль 126 связи может быть беспроводным или проводным компонентом связи, который может обеспечить связь с системой 38 управления. По существу, модуль 126 связи может включать в себя беспроводную карту или порт данных (например, Ethernet), способные передавать или принимать данные. Например, модуль 126 связи может быть выполнен с возможностью приема команд от системы 38 управления.
[0056] В одном варианте осуществления, данные передаются между аналитической системой 37 и системой 38 управления, по меньшей мере частично, через беспроводную или проводную сеть. Аналитическая система 37 может передавать данные, включающие в себя информацию о транспортном средстве, как описано выше, системе 38 управления, когда оно отслеживается датчиком 36. Еще раз отметим, что такие данные могут включать в себя идентификатор транспортного средства для отдельного транспортного средства 32 и соответствующее положение, размер, скорость, направление перемещения, выходную мощность двигателя, и т.п. На основе принятых данных от аналитической системы 37, система 38 управления может определить, какие элементы 10 сетки следует привести в действие, и как каждый выбранный элемент 10 сетки должен функционировать для выполнения требуемого маневра и/или эффекта. Затем, система 38 управления может отправить команды к выбранным элементам 10 сетки, которые действуют в согласованной последовательности для управления перемещением транспортного средства 32. Например, элементы 10 сетки могут обеспечить возможность выполнения одного или нескольких маневров и/или эффектов, таких как управляемое по времени действие, посредством почти мгновенного замедления транспортного средства 32, предписания транспортному средству выполнить управляемый маневр, и быстрого ускорения транспортного средства 32 до большей скорости. Как упомянуто выше, аналитическая система 37 может контролировать более одного транспортного средства 32 и отправлять их информацию о транспортных средствах системе 38 управления. В свою очередь, система 38 управления может определить все разные элементы 10 сетки, которые необходимо привести в действие, и как они должны функционировать для организации многочисленных транспортных средств, выполняющих одни и те же или разные маневры и/или эффекты. Таким образом, многочисленные транспортные средства 32 в динамической области вождения могут управляться таким образом, чтобы они выполняли требуемые специализированные маневры и/или эффекты одновременно, что может обеспечить в результате очень увлекательный опыт для зрительской аудитории и/или катающегося посетителя.
[0057] В другом варианте осуществления, данные передаются между транспортным средством 32 и системой 38 управления, по меньшей мере частично, через беспроводную сеть. Транспортное средство 32 может передавать данные, включающие в себя информацию о транспортном средстве, как описано выше, системе 38 управления. Еще раз отметим, что такие данные могут включать в себя идентификатор транспортного средства для отдельного транспортного средства 32 и соответствующее положение, размер, скорость, направление перемещения, выходную мощность двигателя, и т.п. На основе принятых данных от транспортного средства 32, система 38 управления может определить, какие элементы 10 сетки следует привести в действие, и как каждый выбранный элемент 10 сетки должен функционировать для выполнения требуемого маневра и/или эффекта. Затем, система 38 управления может отправить команды к выбранным элементам 10 сетки, которые действуют в согласованной последовательности для управления перемещением транспортного средства 32. Например, элементы 10 сетки могут обеспечить возможность выполнения одного или нескольких маневров и/или эффектов, таких как управляемое по времени действие, посредством почти мгновенного замедления транспортного средства 32, предписания транспортному средству 32 выполнить управляемый маневр, и быстрого ускорения транспортного средства 32 до большей скорости. В этом варианте осуществления, аналитическая система 37 может не использоваться.
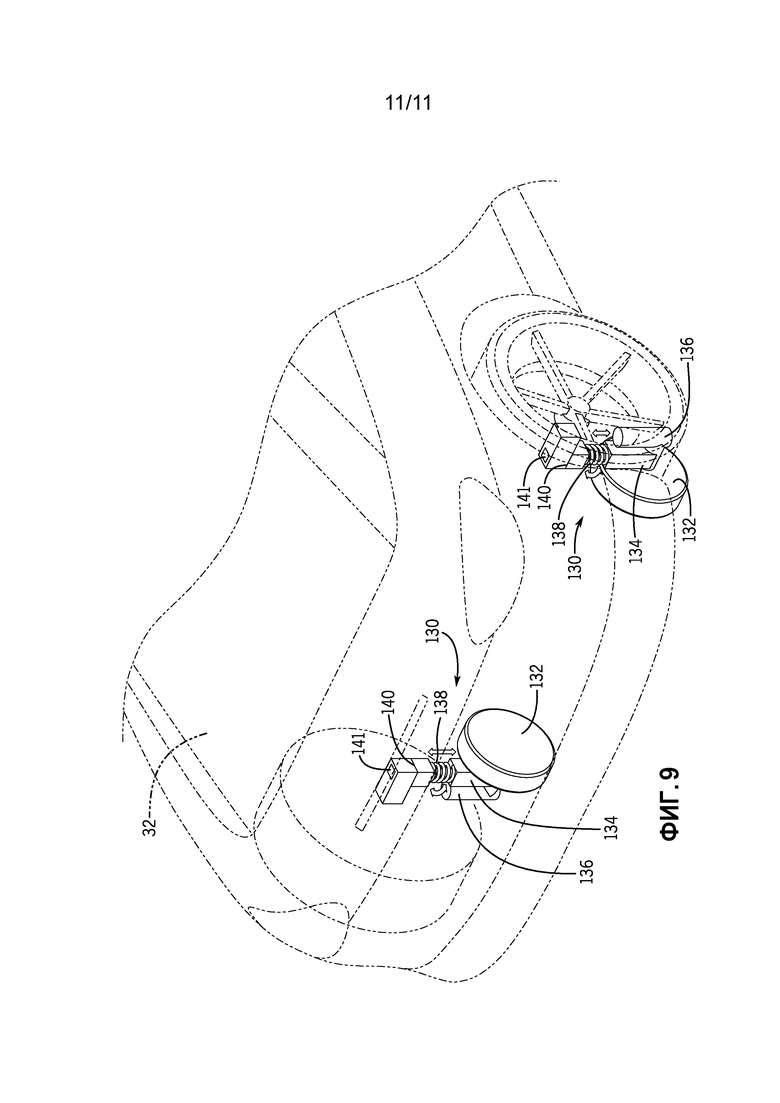
[0058] В одном варианте осуществления, транспортировка транспортного средства 32 может быть обеспечена с использованием механизмов, которые являются компонентами транспортного средства 32. Например, фиг. 9 иллюстрирует механизм управления с использованием колесного элемента 130. Колесный элемент 130 может включать в себя компоненты, по существу, подобные компонентам элемента 10 сетки, но колесный элемент прикреплен на внутренней стороне каждого колеса транспортного средства 32 и не является компонентом динамической области вождения (например, компонентом, установленным в отверстии в поверхности динамической области вождения). Действительно, колесный элемент 130 может включать в себя блок 132 управления перемещением, вал 134, двигатель 136, вертикальный исполнительный механизм 138, блок 140 конфигурирования направления, схемы 141 управления и связи, или некоторую их комбинацию. Блок 132 управления перемещением может включать в себя колесо, меньшее, чем колесо транспортного средства. Блок 140 конфигурирования направления может включать в себя шестерню, которая сцепляется с выступами на линейной планке, прикрепленной к колесу или основанию колесного элемента 130, и обеспечивает возможность поворота вплоть до 360°. Вертикальный исполнительный механизм 138 может включать в себя гидравлическую, электрическую, или пневматическую систему подъема.
[0059] Колесными элементами 130 можно управлять, по существу, подобным образом, что и элементами 10 сетки. А именно, информация о транспортном средстве может отслеживаться аналитической системой, которая отправляет информацию о транспортном средстве системе управления. Система управления может определить, какие колесные элементы 130 следует привести в действие, и как каждый из них должен функционировать для исполнения требуемого маневра и/или эффекта. Затем, система управления может отправить команды к колесным элементам для приведения их в действие. Команды могут включать в себя информацию, связанную с синхронизацией приведения в действие, направлением силы (например, прямым или обратным), величиной прикладываемой силы (например, скоростью вращения), угловым положением, и т.д. Когда колесные элементы 130 приводятся в действие вертикальным исполнительным механизмом 138, колесные элементы 130 могут проходить вниз до тех пор, пока они не войдут в контакт с поверхностью вождения и не оторвут прикрепленное колесо от земли. В результате, приведенные в действие колесные элементы 130 управляют перемещением транспортного средства. На основе принятых команд, принятых от системы управления, или команд, хранящихся во внутренней памяти, колесные элементы могут обеспечить возможность исполнения специализированных маневров и/или эффектов, таких как управляемое по времени действие. Перед исполнением и после исполнения маневра и/или эффекта, колесные элементы 130 могут быть убраны вертикальным исполнительным механизмом 138 таким образом, чтобы они не контактировали с поверхностью вождения. Как и в случае элементов 10 сетки, колесными элементами 130 может активно управлять система управления, когда транспортное средство 32 перемещается по области вождения, или они могут пассивно управляться посредством исполнения заранее заданных маневров и/или эффектов.
[0060] В то время как здесь были показаны и описаны только некоторые признаки раскрытия сущности настоящего изобретения, специалистам в данной области техники могут прийти на ум многие модификации и изменения. Таким образом, следует понимать, что предполагается, что прилагаемая формула изобретения охватывает все такие модификации и изменения, попадающие в пределы истинной сущности настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ИНТЕРАКТИВНОГО ИГРОВОГО ПОЛА | 2015 |
|
RU2669534C2 |
| СИСТЕМА И СПОСОБ ИНТЕРАКТИВНОГО ИГРОВОГО ПОЛА | 2015 |
|
RU2766655C2 |
| СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ ДЛЯ КАТАНИЯ В ХОДЕ ИГРОВОГО ПРОЦЕССА | 2018 |
|
RU2719237C1 |
| СИСТЕМА УПРАВЛЕНИЯ АТТРАКЦИОНОМ ДЛЯ КАТАНИЯ (ВАРИАНТЫ) | 2017 |
|
RU2753949C2 |
| СИСТЕМА АТТРАКЦИОНА ДЛЯ КАТАНИЯ (ВАРИАНТЫ) И СПОСОБ ЕЁ ЭКСПЛУАТАЦИИ | 2018 |
|
RU2769881C2 |
| ВИРТУАЛЬНАЯ КАРТА ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2693400C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ АТТРАКЦИОНА (ВАРИАНТЫ) И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2018 |
|
RU2769882C2 |
| АТТРАКЦИОН ПАРКА РАЗВЛЕЧЕНИЙ С КОЛЬЦЕВОЙ ИМИТАЦИЕЙ ДВИЖЕНИЯ | 2018 |
|
RU2722476C1 |
| УЛУЧШЕННАЯ ИНТЕРАКТИВНОСТЬ В СРЕДЕ ПАРКА РАЗВЛЕЧЕНИЙ С ИСПОЛЬЗОВАНИЕМ ПАССИВНЫХ ОТСЛЕЖИВАЮЩИХ ЭЛЕМЕНТОВ | 2015 |
|
RU2646313C1 |
| СИСТЕМА ОТСЛЕЖИВАНИЯ И УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ АТТРАКЦИОНА ДЛЯ КАТАНИЯ С ИСПОЛЬЗОВАНИЕМ ПАССИВНЫХ ОТСЛЕЖИВАЮЩИХ ЭЛЕМЕНТОВ | 2015 |
|
RU2679561C2 |

Изобретение относится к системам транспортирования транспортного средства. Система управления транспортировкой транспортного средства содержит множество элементов сетки, аналитическую систему и систему управления. Множество элементов сетки установлены в динамической области вождения в аттракционе и выполнены с возможностью функционирования на основе команд, принятых от системы управления. Аналитическая система выполнена с возможностью отслеживания информации о транспортном средстве, содержащей положение, размер, скорость, ускорение транспортного средства или любую их комбинацию, и отправки информации системе управления. Система управления выполнена с возможностью приема информации о транспортном средстве, определения, какие из множества элементов сетки следует привести в действие, и соответствующего способа приведения в действие на основе требуемого перемещения транспортного средства, и отправки команд, содержащих данные о функционировании, каждому из множества элементов сетки, идентифицированных для приведения в действие. Достигается повышение эффективности транспортирования транспортного средства. 2 н. и 18 з.п. ф-лы, 11 ил.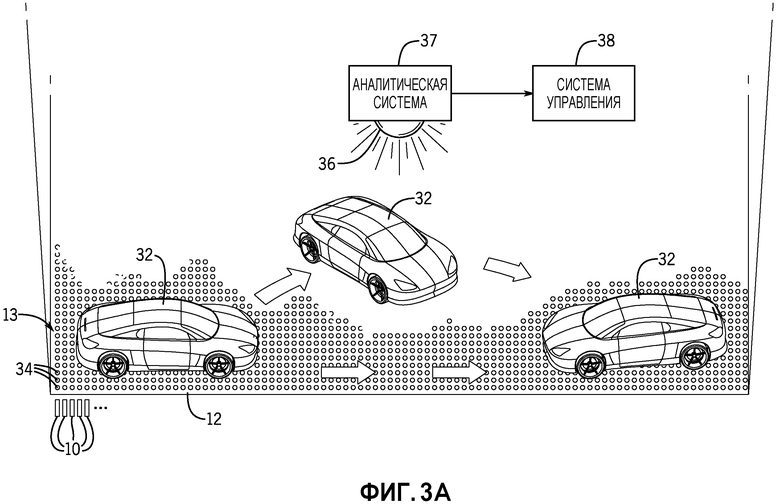
1. Система управления транспортировкой транспортного средства, содержащая:
множество элементов сетки;
аналитическую систему; и
систему управления,
причем множество элементов сетки установлены в динамической области вождения в аттракционе и выполнены с возможностью функционирования на основе команд, принятых от системы управления, для управления перемещением транспортного средства, расположенного на множестве элементов сетки,
аналитическая система выполнена с возможностью отслеживания, посредством одного или нескольких датчиков, информации о транспортном средстве, содержащей положение, размер, скорость, ускорение транспортного средства или любую их комбинацию, и отправки информации о транспортном средстве системе управления посредством модуля связи, и
система управления выполнена с возможностью приема информации о транспортном средстве посредством модуля связи, определения посредством одного или нескольких процессоров, какие из множества элементов сетки следует привести в действие, и соответствующего способа приведения в действие на основе требуемого перемещения транспортного средства, и отправки команд, содержащих данные о функционировании, каждому из множества элементов сетки, идентифицированных для приведения в действие.
2. Система по п. 1, в которой каждый из множества элементов сетки включает в себя соответствующий блок управления перемещением и вертикальный исполнительный механизм, причем блок управления перемещением выполнен с возможностью проходить через соответствующее отверстие в поверхности динамической области вождения на основе приведения в действие вертикального исполнительного механизма.
3. Система по п. 1, в которой каждый из множества элементов сетки включает в себя соответствующий блок управления перемещением, по меньшей мере частично проходящий или выполненный с возможностью прохождения через соответствующее отверстие в поверхности динамической области вождения, и блок конфигурирования вращения, причем каждый из множества элементов сетки включает в себя участок поверхности, через который блок управления перемещением проходит или выполнен с возможностью прохождения, причем участок поверхности выполнен с возможностью вращения в плоскостном направлении вместе с блоком управления перемещением, и блок конфигурирования вращения выполнен с возможностью вращения блока управления перемещением относительно оси, по существу, перпендикулярной плоскостному направлению.
5. Система по п. 1, в которой один или несколько из множества элементов сетки включают в себя соответствующий блок управления перемещением с верхним участком, проходящим через поверхность динамической области вождения и выровненным с верхним участком поверхности.
6. Система по п. 1, в которой каждый из множества элементов сетки включает в себя соответствующий блок управления перемещением, блок конфигурирования вращения, выполненный с возможностью вращения блока управления перемещением с угловой скоростью, и блок конфигурирования направления, выполненный с возможностью поворота блока управления перемещением с выравниванием с плоскостным направлением.
7. Система по п. 1, содержащая дополнительные элементы сетки, причем система управления выполнена с возможностью независимого управления каждым из множества элементов сетки, и система управления выполнена с возможностью совместного управления дополнительными элементами сетки как набором.
8. Система по п. 1, содержащая транспортное средство, включающее в себя двигатель и одно или несколько колес транспортного средства, включающих в себя по меньшей мере одно ведущее колесо транспортного средства, выполненное с возможностью приведения в движение транспортного средства, причем множество элементов сетки включают в себя блоки управления перемещением, которые содержат колеса элементов сетки, управляемые соответствующими двигателями элементов сетки и выполненные с возможностью сцепления с одним или несколькими колесами транспортного средства для управления перемещением транспортного средства.
9. Система по п. 1, содержащая множество транспортных средств, расположенных в области вождения.
10. Система по п. 1, содержащая транспортное средство, включающее в себя реактивную пластину и множество элементов сетки, каждый из которых включает в себя линейную катушку.
11. Система по п. 1, содержащая транспортное средство, включающее в себя систему отслеживания положения и модуль связи, причем система отслеживания положения включает в себя один или несколько датчиков, выполненных с возможностью отслеживания положения транспортного средства в динамической области вождения, а модуль связи выполнен с возможностью передачи положения транспортного средства к модулю связи системы управления.
12. Система по п. 1, в которой каждый элемент сетки содержит блок управления перемещением, включающий в себя колесо элемента сетки, управляемое двигателем, причем колесо элемента сетки выполнено с возможностью сцепления с транспортным средством и управления скоростью вращения, направлением вращения и угловым направлением транспортного средства, что обусловливает, таким образом, выполнение транспортным средством требуемого маневра.
13. Система по п. 1, содержащая динамическую область вождения, включающую в себя динамические участки, где элементы сетки установлены для управления перемещением транспортного средства, и нединамические участки, где элементы сетки не установлены, и транспортное средство управляет своим собственным перемещением.
14. Система по п. 1, в которой данные о функционировании содержат угловую скорость, с которой блок конфигурирования вращения элементов сетки вращает блок управления перемещением элементов сетки, направление, в котором блок конфигурирования вращения вращает блок управления перемещением, угол плоскостного положения, под которым блок конфигурирования направления элементов сетки позиционирует блок управления перемещением, время приведения в действие или некоторую их комбинацию.
15. Система управления транспортировкой транспортного средства, содержащая:
множество элементов сетки;
аналитическую систему; и
систему управления,
причем множество элементов сетки выполнены с возможностью управления перемещением самодвижущегося транспортного средства при сцеплении с транспортным средством, и распределены по площадке динамической области вождения развлекательного аттракциона, аналитическая система выполнена с возможностью контроля информации о транспортном средстве, в том числе угловой скорости и плоскостного направления ведомого колеса транспортного средства, и отправки информации системе управления, а система управления выполнена с возможностью отправки команд элементам сетки для вращения блока управления перемещением элемента сетки на основе плоскостного направления и угловой скорости ведомого колеса в определенный момент времени приведения в действие.
16. Система по п. 15, в которой аналитическая система выполнена с возможностью контроля множества ведомых колес транспортного средства, а система управления учитывает множество ведомых колес перед отправкой команд элементам сетки.
17. Система по п. 15, в которой площадка динамической области вождения выполнена с возможностью вращения в плоскостном направлении по меньшей мере тогда, когда транспортное средство расположено на площадке, и ведомое колесо находится в контакте с одним или несколькими из множества элементов сетки.
18. Система по п. 15, в которой множество элементов сетки выполнены с возможностью управления перемещением транспортного средства посредством одного или нескольких блоков управления перемещением, сцепляющихся с ведомым колесом транспортного средства и противодействующих вращению ведомого колеса.
19. Способ управления транспортировкой транспортного средства, содержащий:
отслеживание посредством аналитической системы информации о транспортном средстве для одного или нескольких транспортных средств, причем одно или несколько транспортных средств едут по динамической области вождения аттракциона или приближаются к ней;
отправку посредством аналитической системы информации о транспортном средстве системе управления с использованием модуля связи аналитической системы и модуля связи системы управления, которые соединены с возможностью связи;
определение посредством системы управления какие из множества элементов сетки, установленных в поверхности динамической области вождения, следует привести в действие, и способа приведения в действие, на основе информации о транспортном средстве, принятой системой управления от аналитической системы, и требуемого перемещения для одного или нескольких транспортных средств;
отправку посредством системы управления команд, содержащих информацию о функционировании, каждому из множества элементов сетки, идентифицированных для приведения в действие, с использованием модуля связи системы управления и модуля связи выбранных элементов сетки; и
исполнение команд посредством блоков управления перемещением множества элементов сетки, идентифицированных для приведения в действие.
20. Способ по п. 19, в котором каждый из множества элементов сетки включает в себя процессор, выполненный с возможностью исполнения команд, принятых от системы управления.
21. Способ по п. 19, в котором информация о функционировании содержит момент времени для приведения в действие в вертикальном направлении блока управления перемещением для вертикального исполнительного механизма каждого из множества элементов сетки, плоскостное направление, в котором следует позиционировать блок управления перемещением, для блока конфигурирования направления каждого из множества элементов сетки, направление, в котором следует вращать блок управления перемещением, для блока конфигурирования вращения каждого из множества элементов сетки, скорость, с которой следует вращать блок управления перемещением, для блока конфигурирования вращения или некоторую их комбинацию.
22. Способ по п. 19, в котором блоки управления перемещением множества элементов сетки управляют перемещением одного или нескольких транспортных средств согласно командам функционирования, посредством сцепления с одним или несколькими колесами транспортных средств, когда одно или несколько транспортных средств проезжают поверх соответствующего блока управления перемещением, приведенного в действие в динамической области вождения.
| US 5901398 A, 11.05.1999 | |||
| US 7224252 B2, 29.05.2007 | |||
| СПОСОБ АЭРОДРОМНОГО ОБЕСПЕЧЕНИЯ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2453479C1 |

