Область и уровень техники
Настоящее изобретение, в целом, относится к системе и способу управления аттракционом и, в частности, к системе и способу управления движением транспортного средства или развлекательным мероприятием на трассе аттракциона.
В парках отдыха с аттракционами или в парках развлечений все более популярными становятся аттракционы для катания. Аттракционы парков развлечений часто включают в себя передвижные аттракционы, которые включают в себя транспортные средства для катания, передвигающиеся по некоторому пути (например, по железной дороге или треку), стационарные аттракционы, которые могут включать в себя подвижное основание, или комбинации соответствующих аттракционов. Путь передвижного аттракциона может пролегать в различных условиях (например, на вершине горы, в туннеле, под водой). Вдоль такого пути могут происходить различные типы развлекательных мероприятий, такие как движущиеся фигурки (например, аниматроники), проекции видеомонитора, звуковые эффекты, водные эффекты и т.п. В стационарных аттракционах подвижная пассажирская платформа, имеющая несколько степеней свободы, как правило, находится на относительно неподвижном основании. Такая пассажирская платформа может осуществлять движения в нескольких различных направлениях, включая угловые движения, такие как крен, тангаж и рыскание, и прямолинейные движения, такие как перемещения в вертикальном и горизонтальном направлениях. Рядом с пассажирской платформой часто располагается один или несколько проекционных экранов, показывающих серию изображений или кинофильм. Для дополнительного реализма и эффекта движение пассажирских платформ может быть синхронизировано с проецируемыми изображениями или кинофильмом.
Мониторинг и управление аттракционами парка развлечений, как правило, осуществляются с помощью центрального контроллера или компьютера. Например, центральный контроллер может осуществлять мониторинг положения каждого транспортного средства для катания на соответствующем пути, и когда расстояние между транспортными средствами становится меньше определенного минимального расстояния, все транспортные средства для катания на пути могут быть остановлены. Центральный контроллер также может запускать развлекательные мероприятия, такие как проекции видеомонитора, в соответствии с местоположением транспортного средства для катания. Такие системы управления часто включают в себя множество датчиков, установленных в различных местах вдоль пути со сложной электропроводкой для подключения каждого датчика к центральному контроллеру. В настоящее время признано, что такие традиционные системы управления, как правило, дороги в содержании и не могут быть легко интегрированы.
Краткое описание изобретения
Ниже приводятся определенные варианты осуществления, соответствующие объему первоначально заявленного предмета изобретения. Данные варианты осуществления не предназначены для ограничения объема изобретения, они предоставляют лишь краткое описание определенных раскрытых вариантов осуществления. В действительности настоящее изобретение может включать в себя различные формы, которые могут быть подобны вариантам осуществления, изложенным ниже, или быть отличными от них.
В соответствии с одним из аспектов настоящего изобретения система управления катанием включает в себя множество транспортных средств для катания, расположенных на трассе и выполненных с возможностью передвижения по трассе. Каждое из множества транспортных средств для катания включает в себя контроллер транспортного средства, выполненный с возможностью управления движением соответствующего транспортного средства для катания. Каждое из множества транспортных средств для катания также включает в себя систему отслеживания положения, выполненную с возможностью облегчения определения местоположения соответствующего транспортного средства для катания на трассе. Кроме того, каждое из множества транспортных средств для катания включает в себя приемопередатчик транспортного средства, связанный с контроллером транспортного средства. Система управления катанием также включает в себя основной контроллер и основной приемопередатчик, связанный с основным контроллером. Кроме того, система управления катанием включает в себя основную беспроводную сеть, образованную приемопередатчиком транспортного средства и основным приемопередатчиком, чтобы включать в себя по меньшей мере основной контроллер и контроллеры всех транспортных средств для катания. Основной контроллер выполнен с возможностью приема данных, указывающих местоположение каждого из множества транспортных средств для катания, от соответствующих транспортных средств для катания через основную беспроводную сеть. Основной контроллер и контроллеры всех транспортных средств для катания выполнены с возможностью координации с целью обеспечения контура управления для каждого из множества транспортных средств для катания на основе данных, указывающих местоположение каждого из множества транспортных средств для катания.
В соответствии с другим аспектом настоящего изобретения система управления катанием включает в себя множество транспортных средств для катания, расположенных на трассе и выполненных с возможностью передвижения по трассе. Каждое из множества транспортных средств для катания включает в себя контроллер транспортного средства, выполненный с возможностью управления движением соответствующего транспортного средства для катания. Каждое из множества транспортных средств для катания также включает в себя систему отслеживания положения, выполненную с возможностью облегчения определения местоположения соответствующего транспортного средства для катания на трассе. Кроме того, каждое из множества транспортных средств для катания включает в себя приемопередатчик транспортного средства, связанный с контроллером транспортного средства. Система управления катанием также включает в себя основной контроллер и основной приемопередатчик, связанный с основным контроллером. Кроме того, система управления катанием включает в себя основную беспроводную сеть, образованную приемопередатчиком транспортного средства и основным приемопередатчиком, чтобы включать в себя по меньшей мере основной контроллер и контроллеры всех транспортных средств для катания. Основной контроллер выполнен с возможностью приема первого набора данных, указывающих местоположение каждого из множества транспортных средств для катания, от соответствующих транспортных средств для катания через основную беспроводную сеть. Система управления катанием также включает в себя резервный контроллер, связанный с основным контроллером и резервный приемопередатчик, связанный с резервным контроллером. Кроме того, система управления катанием включает в себя резервную беспроводную сеть, образованную приемопередатчиком транспортного средства и резервным приемопередатчиком, чтобы включать в себя по меньшей мере резервный контроллер и контроллеры всех транспортных средств для катания. Резервный контроллер выполнен с возможностью приема второго набора данных, указывающих местоположение каждого из множества транспортных средств для катания, от соответствующих транспортных средств для катания через резервную беспроводную сеть. Система управления катанием дополнительно включает в себя двунаправленную схему голосования, выполненную с возможностью сравнения первого набора данных со вторым набором данных и выбора между первым набором данных и вторым набором данных. Основной контроллер или резервный контроллер, а также контроллеры всех транспортных средств для катания выполнены с возможностью координации с целью обеспечения контура управления для каждого из множества транспортных средств для катания на основе первого и второго наборов данных, указывающих местоположение каждого из множества транспортных средств для катания.
В соответствии с другим аспектом настоящего изобретения способ управления множеством транспортных средств для катания на трассе включает в себя определение местоположения каждого из множества транспортных средств для катания. Указанный способ также включает в себя передачу местоположения каждого из множества транспортных средств для катания системному контроллеру через основную беспроводную сеть. Основная беспроводная сеть включает в себя системный контроллер и контроллеры всех транспортных средств для катания. Кроме того, указанный способ включает в себя передачу местоположения каждого из множества транспортных средств для катания резервному контроллеру через резервную беспроводную сеть. Резервная беспроводная сеть включает в себя резервный контроллер и контроллеры всех транспортных средств для катания. Указанный способ также включает в себя процесс выбора с использованием двунаправленной схемы одного из местоположений: местоположения, получаемого системным контроллером, или местоположения, получаемого резервным контроллером. Кроме того, указанный способ включает в себя управление движением каждого из множества транспортных средств для катания посредством системного контроллера в соответствии с выбранным местоположением.
Краткое описание чертежей
Эти и другие особенности, аспекты и преимущества настоящего изобретения станут более понятными из нижеследующего подробного описания со ссылками на прилагаемые чертежи, на которых одинаковыми ссылочными позициями обозначены одни и те же элементы. На чертежах:
фиг.1 - схематический вид одного из вариантов осуществления системы управления катанием в соответствии с настоящим изобретением;
фиг.2 - вид сверху для трека, по которому транспортное средство для катания может передвигаться в соответствии с одним из вариантов осуществления настоящего изобретения;
фиг.3 - схематический вид системы управления катанием, которая включает в себя пять транспортных средств для катания, передвигающихся по трассе, в соответствии с одним из вариантов осуществления настоящего изобретения; и
фиг.4 - блок-схема способа для мониторинга и управления множеством транспортных средств на трассе.
Подробное описание изобретения
Настоящее изобретение обеспечивает систему управления катанием, которая включает в себя множество транспортных средств для катания, расположенных на трассе и выполненных с возможностью передвижения по трассе. Каждое из множества транспортных средств для катания включает в себя контроллер транспортного средства, выполненный с возможностью управления движением соответствующего транспортного средства для катания. Движение каждого транспортного средства для катания может включать в себя внешние движения, такие как изменение скорости и остановка транспортного средства для катания на трассе, и внутренние движения, такие как поворот и наклон пассажирской платформы относительно основания транспортного средства для катания. Каждое из множества транспортных средств для катания также может включать в себя систему отслеживания положения, выполненную с возможностью облегчения определения местоположения соответствующего транспортного средства для катания на трассе. Каждый контроллер транспортного средства соединен с приемопередатчиком транспортного средства.
Система управления катанием также включает в себя системный контроллер, который включает в себя основной контроллер и резервный контроллер. Основной контроллер соединен с основным приемопередатчиком. Основная беспроводная сеть образована основным приемопередатчиком и множеством приемопередатчиков транспортных средств. Таким образом, основная беспроводная сеть включает в себя основной контроллер и множество контроллеров транспортных средств. Через основную беспроводную сеть основной контроллер может получать данные, указывающие состояние (например, положение и скорость) каждого из множества транспортных средств для катания, и на основе полученных данных посылать команды для регулировки движения соответствующего транспортного средства для катания. Например, после приема данных, указывающих на то, что первое транспортное средство для катания приближается ко второму транспортному средству для катания на чрезмерной скорости, основной контроллер может дать указание первому транспортному средству для катания замедлиться или остановиться.
Кроме того, в некоторых вариантах осуществления основной контроллер соединен с одним или несколькими развлекательными мероприятиями вдоль трассы и управляет их работой. Развлекательные мероприятия могут включать в себя видеопроекции изображений или кинофильмов, представления фигурок или героев мультфильмов, звуковые эффекты или т.п. На основе полученных данных, указывающих состояние (например, положение и скорость) каждого из множества транспортных средств для катания, основной контроллер может посылать команды соответствующему транспортному средству для катания и/или развлекательным мероприятиям, чтобы синхронизировать движение соответствующего транспортного средства для катания с развлекательными мероприятиями. Например, основной контроллер может запускать развлекательное мероприятие заранее, когда транспортное средство для катания движется в сторону этого развлекательного мероприятия на более высокой скорости. Кроме того, основной контроллер может посылать команды транспортному средству для катания, например, чтобы отрегулировать его скорость передвижения и поворот сиденья для синхронизации с различными объектами развлекательных мероприятий.
В соответствии с настоящим изобретением основной контроллер осуществляет мониторинг и управление каждым из множества транспортных средств для катания независимо. Например, основной контроллер может независимо управлять изменением скорости и остановкой каждого из множества транспортных средств для катания. Основной контроллер может дать указание одному из транспортных средств для катания обойти основной путь для прибытия на станцию технического обслуживания, сохраняя при этом остальные транспортные средства для катания работающими на основном пути. Основной контроллер может устанавливать независимые часы для каждого развлекательного мероприятия по отношению к различным транспортным средствам для катания и регулировать движение транспортных средств для катания с целью синхронизации с соответствующими часами развлекательных мероприятий.
Кроме того, в соответствии с настоящим изобретением системный контроллер системы управления катанием также может включать в себя резервный контроллер с соответствующим резервным приемопередатчиком. Резервный приемопередатчик и множество приемопередатчиков транспортных средств образуют резервную беспроводную сеть. Через резервную беспроводную сеть резервный контроллер осуществляет мониторинг положения и скорости каждого из множества транспортных средств для катания в дополнение к основному контроллеру и независимо от него. Таким образом, резервный контроллер может быть использован с целью обеспечения независимых данных для дополнительной точности или надежности мониторинга положения множества транспортных средств для катания. В случае если основной контроллер или основная беспроводная сеть выйдут из строя, движением множества транспортных средств для катания может управлять резервный контроллер.
Кроме того, система управления катанием может следить за ухудшением рабочих характеристик каждого из множества транспортных средств для катания путем записи параметров эксплуатационного состояния, таких как скорость или мощность двигателя, в течение определенного периода времени. Это позволяет определять необходимость технического обслуживания для каждого из множества транспортных средств для катания. Кроме того, система управления катанием в соответствии с настоящим изобретением также может вычислять виртуальные зоны блокировки каждого из множества транспортных средств для катания, устраняя тем самым необходимость в физических разрывах между зонами трассы. Например, на основе полученных данных, указывающих положение и скорость каждого из множества транспортных средств для катания, основной контроллер может вычислять виртуальные зоны блокировки вокруг (например, спереди, сзади) соответствующих транспортных средств для катания. Как только вычисляемые виртуальные зоны блокировки для различных транспортных средств для катания начинают перекрываться, основной контроллер может давать указание одному или нескольким транспортным средствам для катания скорректировать свое движение (например, замедлиться или остановиться), чтобы избежать столкновения.
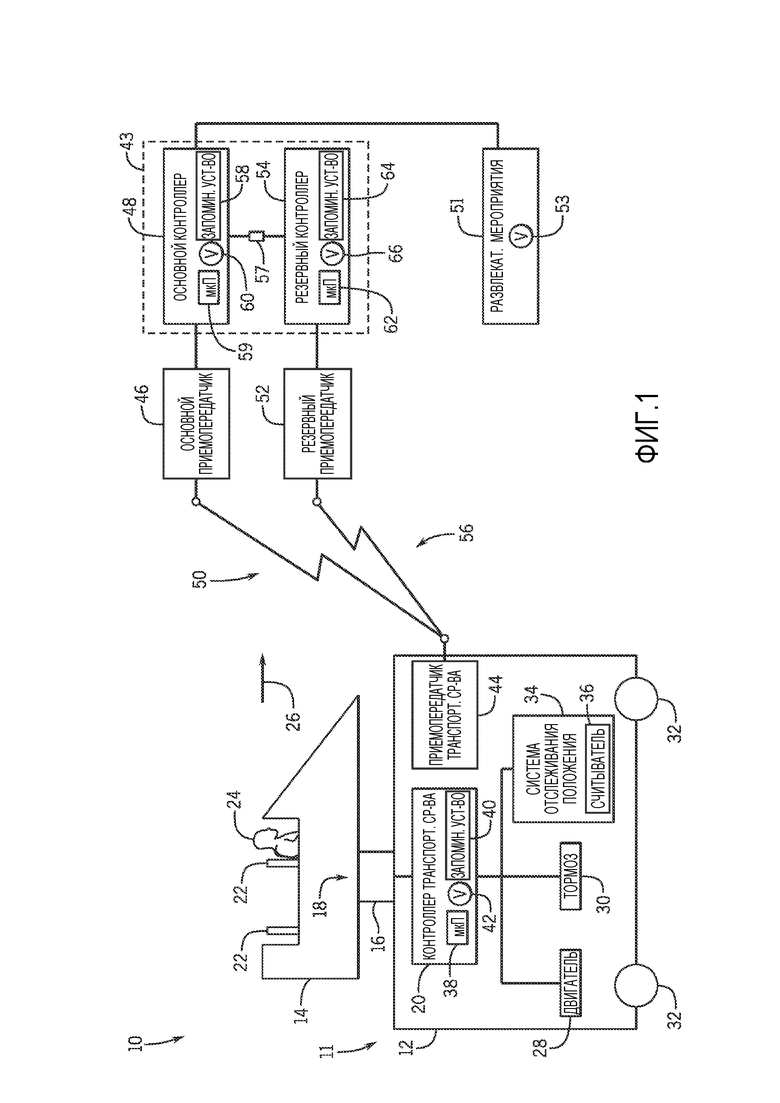
С учетом вышесказанного, фиг.1 иллюстрирует схематическое представление варианта осуществления системы 10 управления катанием в соответствии с настоящим изобретением. Система 10 управления катанием включает в себя множество транспортных средств для катания (например, таких как транспортное средство 11), расположенных на трассе и выполненных с возможностью передвижения по трассе. Трасса может включать в себя открытое пространство, детскую площадку или путь (например, железную дорогу или трек). Транспортное средство 11 включает в себя основание 12 и пассажирскую платформу 14 (например, зону посадки пассажира) на верхней части основания 12. Исполнительный механизм 16, который может представлять собой несколько исполнительных механизмов, соединяет основание 12 и пассажирскую платформу 14 в районе центральной области 18 пассажирской платформы 14. Контроллер 20 транспортного средства управляет исполнительным механизмом 16, чтобы придавать движение пассажирской платформе 14 по нескольким степеням свободы. Такое внутреннее движение пассажирской платформы 14 относительно основания 12 может включать в себя угловые движения, такие как крен, тангаж и рыскание, и прямолинейные движения, такие как перемещения в вертикальном и горизонтальном направлениях. Исполнительный механизм 16 может быть исполнительным механизмом любого подходящего типа для обеспечения движения, включая, но не ограничиваясь ими, электрические, гидравлические, пневматические, механические исполнительные механизмы или любые их комбинации. В некоторых вариантах осуществления исполнительный механизм 16 представляет собой набор из нескольких исполнительных механизмов, которые соединяют основание 12 и пассажирскую платформу 14 и обеспечивают движение пассажирской платформы по нескольким степеням свободы.
В показанном варианте осуществления пассажирская платформа 14 включает в себя одно или более мест 22, на которых может сидеть один или несколько пассажиров 24. Транспортное средство 11 движется по трассе в общем направлении, изображенном стрелкой 26. Вдоль трассы может быть расположено одно или несколько развлекательных мероприятий, как изложено более подробно ниже. Когда транспортное средство 11 движется в направлении 26 и достигает развлекательного мероприятия, это мероприятие может запускаться, и пассажир 24 может смотреть, слушать и/или взаимодействовать с развлекательным мероприятием. Для дополнительного реализма и эффекта развлекательное мероприятие может быть синхронизировано с движением пассажирской платформы 14. Например, при прохождении транспортным средством 11 развлекательного мероприятия пассажирская платформа 14 может быть развернута относительно направления 26 с целью облегчения просмотра развлекательного мероприятия. Пассажирская платформа 14 также может быть, например, наклонена с целью имитации поворотного движения транспортного средства 11, когда развлекательное мероприятие отображает автомобиль, выполняющий поворот.
С целью обеспечения внешних движений транспортное средство 11 включает в себя двигатель 28 и тормоз 30. В некоторых вариантах осуществления транспортное средство 11 может включать в себя рулевой механизм, такой как руль. Внешние движения транспортного средства 11 могут включать в себя изменение скорости (например, ускорение, замедление), остановку и поворот транспортного средства 11. Двигатель 28 может приводиться в действие любым подходящим источником питания, включая, но не ограничиваясь ими, батарею, солнечную панель, электрогенератор, газовый двигатель или любую их комбинацию. Тормоз 30 может быть установлен на одном или более колесах 32 транспортного средства 11. Работа двигателя 28 и тормоза 30 может управляться контроллером 20 транспортного средства. Например, контроллер 20 транспортного средства может управлять двигателем 28, регулируя его выходную мощность для ускорения или замедления транспортного средства 11. Контроллер 20 транспортного средства также может управлять тормозом 30, оказывая воздействие на колеса 32 с силой определенной величины для замедления или остановки транспортного средства 11. В некоторых вариантах осуществления рулевой механизм также может управляться контроллером 20 транспортного средства.
Транспортное средство 11 включает в себя систему 34 отслеживания положения для мониторинга своего положения на трассе. Как обсуждается более подробно ниже, вдоль трассы может быть расположено множество датчиков положения. Каждый датчик положения представляет уникальное местоположение (например, координаты относительно одной или более опорных точек) на трассе. Система 34 отслеживания положения транспортного средства включает в себя считыватель 36. Когда транспортное средство 11 передвигается по трассе и проходит рядом с датчиком положения, считыватель 36 может определить координаты датчика положения для обеспечения информации о положении транспортного средства 11. Затем считыватель 36 предоставляет данную информацию о положении контроллеру 20 транспортного средства.
Контроллер 20 транспортного средства включает в себя различные компоненты, которые могут позволять оператору взаимодействовать с транспортным средством 11. Контроллер 20 транспортного средства может включать в себя контроллер автоматизации или набор контроллеров автоматизации, таких как распределенная система управления (DCS), программируемый логический контроллер (ПЛК) или любое компьютеризированное устройство, которое полностью или частично автоматизировано. Например, контроллер 20 транспортного средства может быть любым устройством, которое использует универсальный или специализированный процессор 38. Контроллер транспортного средства 20 также может включать в себя запоминающее устройство 40 для хранения команд, исполняемых процессором 38 с целью выполнения способов и управляющих действий, описанных в настоящем документе для транспортного средства 11. Процессор 38 может включать в себя одно или несколько устройств обработки, а запоминающее устройство 40 (например, жесткий диск) может включать в себя один или несколько материальных, энергонезависимых, машиночитаемых носителей. Такие машиночитаемые носители могут включать в себя, например, ОЗУ, ПЗУ, стираемое ППЗУ, электронно-стираемое ППЗУ, ПЗУ на компакт-диске, или другие накопители на оптических дисках, накопители на магнитных дисках, или другие магнитные запоминающие устройства, или любые другие носители, которые могут использоваться для переноса или хранения желаемого программного кода в виде машинно-исполняемых команд или структур данных и которые могут быть доступны процессору 38, или любому универсальному или специализированному компьютеру, или другому устройству с процессором. Несмотря на то, что определенные типовые варианты осуществления в данном документе описаны как эксплуатируемые для выполнения функций посредством контроллера 20 транспортного средства (например, процессора 38), следует отметить, что такие функции могут выполняться и основным контроллером 48 и/или основным контроллером 48 совместно с контроллером 20 транспортного средства.
Контроллер 20 транспортного средства также включает в себя часы 42 транспортного средства (например, программные часы), которые работают, чтобы предоставлять информацию о времени для операций контроллера 20 транспортного средства. Например, часы 42 транспортного средства могут отмечать момент времени, в который контроллер 20 транспортного средства посылает команды двигателю 28 на ускорение транспортного средства 11 или тормозу 30 на остановку транспортного средства 11. Часы 42 транспортного средства также могут отмечать момент времени, в который считыватель 36 получает информацию о положении транспортного средства 11. Запоминающее устройство 40 контроллера 20 транспортного средства хранит данные о положении, предоставляемые считывателем 36, и соответствующие данные о времени, предоставляемые часами 42 транспортного средства. Например, запоминающее устройство 40 может хранить положение транспортного средства 11 в определенный момент времени и/или в течение определенного периода времени. Процессор 38 может затем обращаться к запоминающему устройству 40 для получения хранимых данных о положении и времени и вычислять скорость транспортного средства 11 в любой момент времени и/или среднюю скорость в течение определенного периода времени. Информация о вычисленной скорости также может храниться в запоминающем устройстве 40.
Процессор 38 контроллера 20 транспортного средства также может вычислять или иным образом устанавливать (например, получать от центрального контроллера, такого как основной контроллер 48) зону блокировки транспортного средства 11 и подобным образом определять (например, вычислять или получать) соответствующие зоны блокировки для других транспортных средств на трассе. Данные зоны блокировки могут быть описаны как области, окружающие соответствующие транспортные средства (например, транспортное средство 11). В случае, когда оказывается так, что зона блокировки транспортного средства 11 перекрывается с зоной блокировки другого транспортного средства на трассе, система 10 может принимать меры предосторожности во избежание столкновения этих двух транспортных средств и связанного с этим отвлечения водителей 24 от желаемого опыта катания. Например, при определении зоны блокировки для транспортного средства 11 процессор 38 или системный контроллер 48 может определять, основываясь на текущей скорости и состоянии нагрузки транспортного средства 11, расстояние до остановки, которое придется преодолеть транспортному средству 11 до полной остановки с определенным замедлением (например, с замедлением заранее определенного значения или с полной силой тормоза 30).
Зона блокировки может быть обозначена в виде границы (например, окружности) вокруг транспортного средства 11. В одном из вариантов осуществления такая граница представляет собой окружность с радиусом, равным полученному расстоянию до остановки в определенном направлении. В одном из вариантов осуществления указанная граница может быть обозначена в виде областей на пути (например, впереди и позади транспортного средства 11), которые бы устанавливали требуемую буферную зону на основе измеренных значений, связанных с транспортным средством 11 (например, на основе его скорости) и/или с другими транспортными средствами. В соответствии с настоящим изобретением зона блокировки транспортного средства 11 является динамической, поскольку площадь зоны блокировки может быть отрегулирована по существу в режиме реального времени на основе скорости и положения транспортного средства 11. Таким образом, зона блокировки, определяемая по отношению к транспортному средству 11, перемещается вместе с тем, как транспортное средство 11 передвигается по трассе. Размер зоны блокировки также может быть отрегулирован динамически в зависимости от положения на трассе. Например, может быть желательным расширить зоны блокировки транспортных средств в одном или более направлениях в пределах определенной части трассы, чтобы избежать линии прямой видимости между транспортными средствами в целях достижения желаемого эффекта или атмосферы катания (например, ощущения изолированности).
Процессор 38 контроллера 20 транспортного средства также может определять состояние нагрузки (например, вес всех пассажиров в транспортном средстве 11) транспортного средства 11. В одном из вариантов осуществления транспортное средство 11 включает в себя датчик веса в пассажирской платформе 14. Датчик веса выполнен с возможностью измерения веса всех пассажиров и отправки данных о весе контроллеру 20 транспортного средства. В другом варианте осуществления контроллер 20 транспортного средства определяет состояние нагрузки, основываясь на по меньшей мере выходной мощности двигателя и скорости передвижения транспортного средства 11. Например, когда транспортное средство 11 имеет более легкую нагрузку (например, когда на транспортном средстве 11 катаются двое детей по сравнению с двумя взрослыми), двигатель может иметь более низкую выходную мощность для поддержания транспортного средства на определенной скорости или транспортное средство 11 может ускоряться быстрее для достижения определенной скорости с определенной выходной мощностью. Таким образом, записывая изменение скорости вместе с изменением выходной мощности двигателя, контроллер 20 транспортного средства может определять вес всех пассажиров в транспортном средстве 11.
Система 10 управления катанием включает в себя системный контроллер 43 для мониторинга и управления движением транспортного средства 11. Системный контроллер 43 включает в себя основной контроллер 48 и резервный контроллер 54. Транспортное средство 11 включает в себя приемопередатчик 44 транспортного средства (который может представлять собой, например, основной приемопередатчик транспортного средства и резервный приемопередатчик транспортного средства), который соединен с контроллером 20 транспортного средства. Приемопередатчик 44 транспортного средства имеет беспроводную связь с основным приемопередатчиком 46, который соединен с основным контроллером 48. Таким образом, контроллер 20 транспортного средства посредством приемопередатчика транспортного средства 44 беспроводным образом соединен с основным контроллером 48 посредством основного приемопередатчика 46. Соответственно, образуется основная беспроводная сеть 50, содержащая по меньшей мере основной контроллер 48 и контроллер 20 транспортного средства. В то время как множество транспортных средств для катания расположены на трассе, каждый контроллер 20 транспортного средства с приемопередатчиком 44 транспортного средства соответствующего транспортного средства для катания из множества транспортных средств для катания может быть соединен с основным контроллером 48 посредством основного приемопередатчика 46. Соответственно, основная беспроводная сеть 50 может содержать основной контроллер 48 и множество контроллеров 20 транспортного средства.
Передача данных между основным контроллером 48 и контроллером 20 транспортного средства осуществляется через основную беспроводную сеть 50. Контроллер 20 транспортного средства может передавать основному контроллеру 48 данные, указывающие состояние транспортного средства. Такие данные могут включать в себя идентификатор транспортного средства, положение, скорость, динамическую зону блокировки, направление движения, выходную мощность двигателя, состояние нагрузки или т. п. На основе данных, полученных от контроллера 20 транспортного средства, основной контроллер 48 может посылать команды контроллеру 20 транспортного средства с целью управления движением транспортного средства 11. Например, основной контроллер 48 может производить сравнение динамических зон блокировки всех транспортных средств для катания на трассе, чтобы на основе их скоростей передвижения, текущих положений и направлений передвижения определять, будет ли какое-либо из транспортных средств для катания мешать другому. В случае если будет, основной контроллер 48 может посылать команды, например, второму транспортному средству для катания, которое находится позади первого транспортного средства для катания, на замедление или остановку. В соответствии с настоящим изобретением основной контроллер 48 управляет каждым из множества транспортных средств для катания независимо. Таким образом, в то время как в вышеприведенном примере основной контроллер 48 посылает команды второму транспортному средству для катания на замедление или остановку, основной контроллер 48 может одновременно посылать команды первому транспортному средству для катания на ускорение, или поддержание текущей скорости, или даже на замедление или остановку до тех пор, пока динамические зоны блокировки двух транспортных средств для катания не перестанут перекрываться.
В соответствии с некоторыми вариантами осуществления основной контроллер 48 также соединен с одним или несколькими развлекательными мероприятиями 51 вдоль трассы и управляет их работой. Развлекательное мероприятие 51 может включать в себя видео-объекты (например, проекцию изображений или кинофильм), звуковые эффекты, движущиеся объекты (например, летающие фигурки, извержение вулкана), аниматроников (например, ходячего динозавра) или любые их комбинации. Предполагается, что любые подходящие развлекательные мероприятия, которые могут управляться контроллером, могут быть включены в трассу. Развлекательное мероприятие 51 может включать в себя часы 53 мероприятия. Часы 53 мероприятия могут делать временные отметки для одного или более (например, для всех) объектов мероприятия в процессе показа развлекательного мероприятия 51. Например, часы 53 мероприятия могут делать временные отметки некоторых изображений последовательности изображений, определенных кадров кинофильма, определенных движений в последовательности движений аниматронной фигуры или т. п. В некоторых вариантах осуществления часы 53 мероприятия объединены с основным контроллером 48, а не с развлекательным мероприятием 51.
В соответствии с настоящим изобретением, на основе полученных данных, указывающих состояние транспортного средства 11, основной контроллер 48 может посылать команды контроллеру 20 транспортного средства и/или развлекательному мероприятию 51 для синхронизации движения транспортного средства 11 с развлекательным мероприятием 51. Например, после приема данных, указывающих на более высокую скорость передвижения транспортного средства 11, от контроллера транспортного средства 20, основной контроллер 48 может запускать развлекательное мероприятие 51 заранее при приближении транспортного средства 11 к развлекательному мероприятию 51. И наоборот, после приема данных, указывающих на более низкую скорость передвижения транспортного средства 11, основной контроллер 48 может запускать развлекательное мероприятие 51 позднее. Кроме того, основной контроллер 48 может синхронизировать внутренние движения транспортного средства 11 (например, поворот, наклон пассажирской платформы 14) с определенными объектами развлекательного мероприятия 51. Если, например, основной контроллер 48 принимает от контроллера 20 транспортного средства данные, указывающие на более высокую скорость передвижения транспортного средства 11, то основной контроллер 48 может посылать команды развлекательному мероприятию 51 на соответствующее увеличение скорости показа объектов мероприятия и на увеличение скорости внутренних движений транспортного средства 11 или посылать команды контроллеру 20 транспортного средства на замедление транспортного средства 11 до согласованной скорости передвижения и на уменьшение скорости внутренних движений транспортного средства 11 относительно скорости показа объектов мероприятия.
В дополнение к беспроводной связи с основным приемопередатчиком 46 приемопередатчик 44 транспортного средства имеет беспроводную связь с резервным приемопередатчиком 52. В некоторых вариантах осуществления отдельный приемопередатчик транспортного средства (например, вместо приемопередатчика 44 транспортного средства) может быть соединен с контроллером 20 транспортного средства и иметь беспроводную связь с резервным приемопередатчиком 52. Резервный приемопередатчик 52 соединен с резервным контроллером 54 системного контроллера 43. Таким образом, контроллер 20 транспортного средства посредством приемопередатчика транспортного средства 44 беспроводным образом соединен с резервным контроллером 54 посредством резервного приемопередатчика 52. Соответственно, образуется резервная беспроводная сеть 56, содержащая по меньшей мере резервный контроллер 54 и контроллер 20 транспортного средства. Когда на трассе расположено более одного транспортного средства 11, резервная беспроводная сеть 56 может содержать основной контроллер 48 и множество контроллеров 20 транспортных средств. Резервная беспроводная сеть 56 может работать на той же частоте передачи данных, что и основная беспроводная сеть 50, но предпочтительно имеет другую частоту передачи данных.
Как и в случае основной беспроводной сети 50, передача данных между контроллером 20 транспортного средства и резервным контроллером 54 осуществляется через резервную беспроводную сеть 56. Контроллер 20 транспортного средства может передавать резервному контроллеру 54 данные, указывающие состояние транспортного средства. Такие данные могут включать в себя идентификатор транспортного средства, положение, скорость, динамическую зону блокировки, направление движения, выходную мощность двигателя, состояние нагрузки или т. п. В некоторых вариантах осуществления резервный контроллер 54 независимо от основного контроллера 48 может на основе данных, полученных от контроллера транспортного средства 20, посылать команды контроллеру транспортного средства 20 с целью управления движением транспортного средства 11. Кроме того, резервный контроллер 54 независимо от основного контроллера 48 может посылать команды контроллеру 20 транспортного средства и/или развлекательному мероприятию 51 для синхронизации движения транспортного средства 11 с мероприятием 51.
Как было отмечено выше, некоторые данные (например, положение, скорость, динамическая зона блокировки, направление движения, выходная мощность двигателя, состояние нагрузки и т. п.) транспортного средства 11 могут быть вычислены или иным образом получены контроллером транспортного средства 20 (например, процессором 38), однако следует иметь в виду, что такие данные также могут быть вычислены или иным образом получены основным контроллером 48, резервным контроллером 54, основным контроллером 48 совместно с контроллером 20 транспортного средства и/или резервным контроллером 48 совместно с контроллером 20 транспортного средства.
Системный контроллер 43 включает в себя двунаправленную схему 57 голосования, которая соединяет резервный контроллер 54 и основной контроллер 48. Двунаправленная схема 57 голосования выполнена с возможностью сравнения данных о положении и скорости транспортного средства 11, получаемых основным контроллером 48 (через основную беспроводную сеть 50) и резервным контроллером 54 (через резервную беспроводную сеть 56). Два набора данных (например, данные о положении, данные о скорости) могут иметь расхождение ввиду некоторых ошибок, которые могут произойти в одной из беспроводных сетей 50, 56 или в одном из контроллеров 48, 54. Например, одна из беспроводных сетей 50, 56 может принять помехи при передаче данных, или в одном из контроллеров 48, 54 в некоторый момент может возникнуть сбой в системе. Двунаправленная схема 57 голосования может определять, например, на основе предварительно сохраненного алгоритма, какой набор данных (например, данных о положении или данных о скорости) является более точным. Этот процесс может включать в себя сравнение текущих данных со статистическими данными. На основе более точных данных о транспортном средстве 11 системный контроллер 43 может посылать команды контроллеру 20 транспортного средства с целью управления движением транспортного средства 11. В некоторых вариантах осуществления основной контроллер 48 посылает последовательные команды контроллеру 20 транспортного средства независимо от того, какие данные (например, данные, полученные основным контроллером 48 или резервным контроллером 54) определены как более точные. Только в определенных ситуациях (например, когда связь через основную беспроводную сеть 50 пропадает или когда основной контроллер 48 неисправен), резервный контроллер 54 может посылать команды (например, на остановку транспортного средства 11) контроллеру 20 транспортного средства через резервную беспроводную сеть 56. Резервный контроллер 54, однако, не выполнен с возможностью запуска или управления одним или несколькими развлекательными мероприятиями 51. В других вариантах осуществления посылать последовательные команды контроллеру 20 транспортного средства может лишь тот контроллер (например, основной контроллер 48 или резервный контроллер 54), который в соответствии с анализом получил более точные данные. В таких вариантах осуществления основной контроллер 48 и резервный контроллер 54 работают независимо, но дополняют друг друга (например, в любой момент времени, когда функционирует лишь один контроллер) с целью управления движением транспортного средства 11 и с целью синхронизации движения транспортного средства 11 с мероприятием 51.
В некоторых вариантах осуществления в соответствии с настоящим изобретением системный контроллер 43 может включать в себя более двух контроллеров (например, в дополнение к основному контроллеру 48 и резервному контроллеру 54). Например, системный контроллер 43 может включать в себя один основной контроллер (например, основной контроллер 48) и два или более (например, 2, 3, 4, 5, 6 или более) резервных контроллеров (таких как резервный контроллер 54) для дополнительной надежности, точности и безопасности. Соответственно, для соединения более двух контроллеров может быть использована многонаправленная (например, с 3, 4, 5, 6, 7 или с большим количеством направлений) схема голосования. Аналогичным образом многонаправленная схема голосования может быть выполнена с возможностью сравнения данных о транспортном средстве 11, получаемых от более чем двух контроллеров.
Основной контроллер 48 включает в себя различные компоненты, которые могут позволять оператору взаимодействовать с основной беспроводной сетью 50 и транспортным средством 11. Основной контроллер 48 может включать в себя распределенную систему управления (DCS), программируемый логический контроллер (ПЛК) или любой компьютеризированный контроллер или набор контроллеров автоматизации, которые полностью или частично автоматизированы. Например, основной контроллер 48 может быть любым устройством, которое использует универсальный или специализированный процессор 59. Основной контроллер 48 также может включать в себя запоминающее устройство 58 для хранения команд, исполняемых процессором 59 с целью выполнения способов и управляющих действий системы, включающей в себя основную беспроводную сеть 50 и транспортное средство 11. Процессор 59 может включать в себя одно или несколько устройств обработки, а запоминающее устройство 58 может включать в себя один или несколько материальных, энергонезависимых, машиночитаемых носителей. Такие машиночитаемые носители могут включать в себя, например, ОЗУ, ПЗУ, стираемое ППЗУ, электронно-стираемое ППЗУ, ПЗУ на компакт-диске, или другие накопители на оптических дисках, накопители на магнитных дисках, или другие магнитные запоминающие устройства, или любые другие носители, которые могут использоваться для переноса или хранения желаемого программного кода в виде машинно-исполняемых команд или структур данных и которые могут быть доступны процессору 59, или любому универсальному или специализированному компьютеру, или другому устройству с процессором.
Основной контроллер 48 также включает в себя основные часы 60 для предоставления информации о времени различных операций основного контроллера 48. Например, информация о положении транспортного средства 11 может передаваться от контроллера транспортного средства 20 основному контроллеру 48 через основную беспроводную сеть 50, и основные часы 60 могут отмечать момент времени, в который данная информация собирается считывателем 36. Таким образом, скорость транспортного средства 11 в определенный момент времени и/или в течение определенного периода времени может быть вычислена процессором 59 основного контроллера 48 и дополнительно или альтернативно процессором 38 контроллера 20 транспортного средства. Основные часы 60 могут быть синхронизированы с часами 42 транспортного средства или работать независимо от часов 42 транспортного средства. В некоторых вариантах осуществления основные часы 60 также могут быть использованы в качестве часов 53 мероприятия.
Аналогично основному контроллеру 48 резервный контроллер 54 также включает в себя процессор 62, запоминающее устройство 64 и резервные часы 66. Процессор 62, запоминающее устройство 64 и резервные часы 66 резервного контроллера 54 работают аналогично процессору 59, запоминающему устройству 58 и основным часам 60 основного контроллера 48, соответственно. Резервные часы 66 могут быть синхронизированы с основными часами 60.
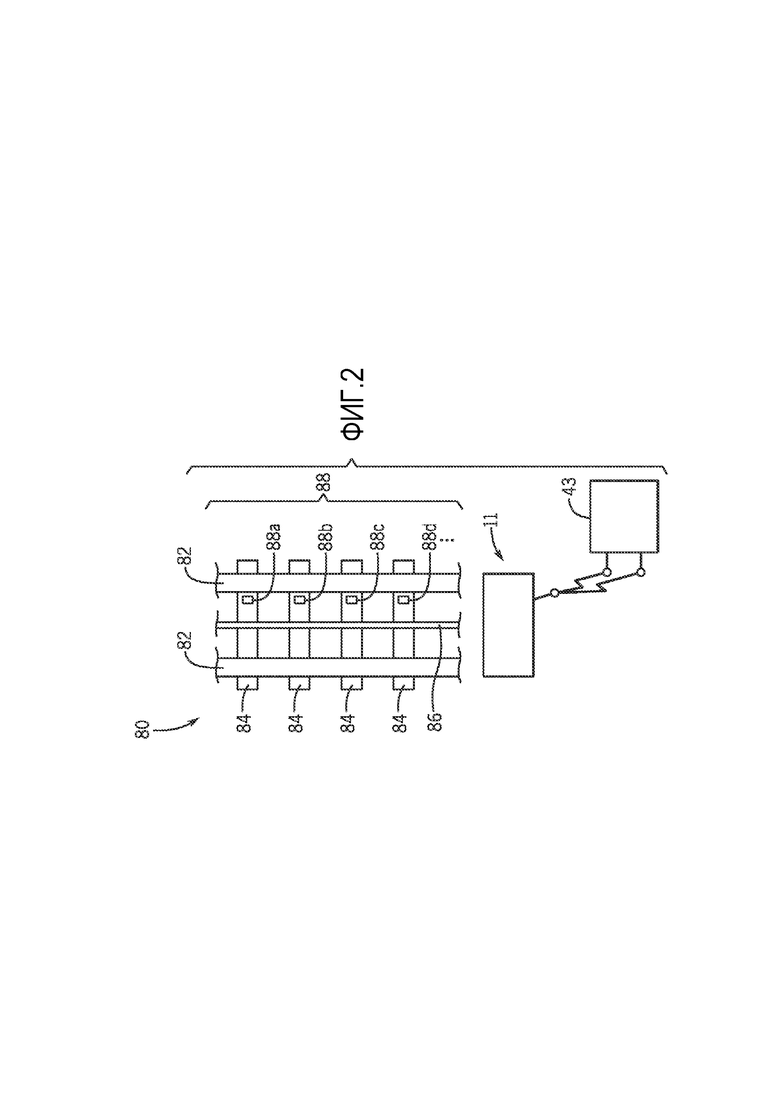
Фиг.2 иллюстрирует вариант осуществления пути (например, трека 80), по которому передвигается транспортное средство 11. Как было отмечено выше, транспортное средство 11 может передвигаться по любой подходящей трассе с наличием или отсутствием трека 80. Например, транспортное средство 11 может передвигаться по открытой площадке или по пути с покрытием. Трек 80 включает в себя пару направляющих 82, которые в целом параллельны друг другу. Колеса 32 транспортного средства 11 контактируют с направляющими 82 и передвигаются по ним. Направляющие 82 поддерживаются поперечными балками 84. Электрическая шина или направляющая 86 с подачей напряжения располагается на поперечных балках 84 и обеспечивает транспортное средство 11 (например, через электрод, прикрепленный к транспортному средству 11) электрической энергией от источника питания (например, от электрического генератора). Трек 80 также включает в себя множество датчиков 88 положения (например, 88а, 88b, 88с, 88d). Несмотря на то, что на фиг.2 показаны лишь четыре датчика положения 88а, 88b, 88с, 88d, следует понимать, что трек 80 может включать в себя любое количество датчиков 88 положения. Как было отмечено выше, датчики 88 положения позволяют основному контроллеру 48 отслеживать положение транспортного средства 11 на трассе (например, на треке 80) через основную беспроводную сеть 50, контроллер 20 транспортного средства и считыватель 36 системы 34 отслеживании положения транспортного средства.
Каждый из датчиков 88 положения представляет определенную точку на трассе. Информация о положении (например, о координатах) датчиков положения 88 может храниться в запоминающем устройстве 58 основного контроллера 48. Идентификаторы (например, серийные номера, порядковые номера) датчиков 88 положения также могут храниться в запоминающем устройстве 58. Расстояние между любыми двумя датчиками 88 положения может быть рассчитано процессором 59 основного контроллера 48. В процессе работы, когда движущееся транспортное средство 11 проходит (например, в пределах небольшого расстояния) мимо одного из датчиков 88 положения, считыватель 36 транспортного средства распознает этот датчик 88 положения. Посредством контроллера транспортного средства 20 и основной беспроводной сети 50 основной контроллер 48 может определять положение транспортного средства 11. По мере того как движущееся транспортное средство 11 проходит более одного датчика 88 положения в разные моменты времени, которые могут быть зафиксированы контроллером 20 транспортного средства и/или основным контроллером 48, скорость транспортного средства 11 может быть вычислена и сохранена основным контроллером 48. Резервный контроллер 54 может осуществлять мониторинг положения и скорости транспортного средства 11 аналогичным образом.
Как показано на фиг.2, датчики 88 положения (например, 88а, 88b, 88с, 88d) расположены вдоль трека 80 и прикреплены к поперечным балкам 84. Однако, следует отметить, что датчики 88 положения могут быть размещены рядом с треком 80 и на треке 80 любым подходящим способом. Например, датчики 88 положения могут быть прикреплены к направляющим 82, к поверхности между поперечными балками 84 или вне трека 80. Расстояние между соседними датчиками 88 положения также может быть гибким в зависимости от требований к точности определения положения. Например, большее расстояние между соседними датчиками 88 положения может привести к менее точному определению положения и скорости транспортного средства 20. Датчики 88 положения могут быть прикреплены к треку 88 с помощью любых подходящих средств, в том числе, но не ограничиваясь этим, адгезионно и механически. Считыватель 36, как правило, располагается на транспортном средстве 11 лицевой стороной к пути (например, к треку 80). Однако, следует понимать, что считыватель 36 может быть размещен и в любой другой конфигурации, которая позволяет ему распознавать и считывать датчики 88 положения.
В соответствии с настоящим изобретением может быть использована любая подходящая пара или набор особенностей, которые предоставляют информацию о местоположении (например, центральная камера мониторинга и идентификационный элемент на каждом транспортном средстве). Например, варианты осуществления настоящего изобретения могут использовать любой идентификационный датчик на трассе, и считыватель на транспортном средстве 11, который имеет возможность распознавать этот датчик, может быть использован для отслеживания положения транспортного средства 11. В одном из вариантов осуществления датчик 88 положения включает в себя пассивную или активную радиочастотную электронику, а считыватель 36 включает в себя антенну, способную распознавать датчик 88 положения. Рабочая частота передачи радиосигнала между датчиком 88 положения и считывателем 36 отличается от рабочей частоты основной беспроводной сети 50 или резервной беспроводной сети 56 во избежание помех. В другом варианте осуществления датчик 88 положения включает в себя штрихкод, а считыватель 36 включает в себя считыватель штрихкода, способный физически считывать датчик 88 положения. В еще одном варианте осуществления датчики 88 положения представляют собой шкалы с различными отметками, кодирующими положение, а считыватель 36 представляет собой преобразователь, способный распознавать различные отметки на шкале. Например, такой шкалой может быть датчик линейных перемещений, а преобразователь может распознавать закодированные положения оптическим, магнитным, емкостным и/или индуктивным способом.
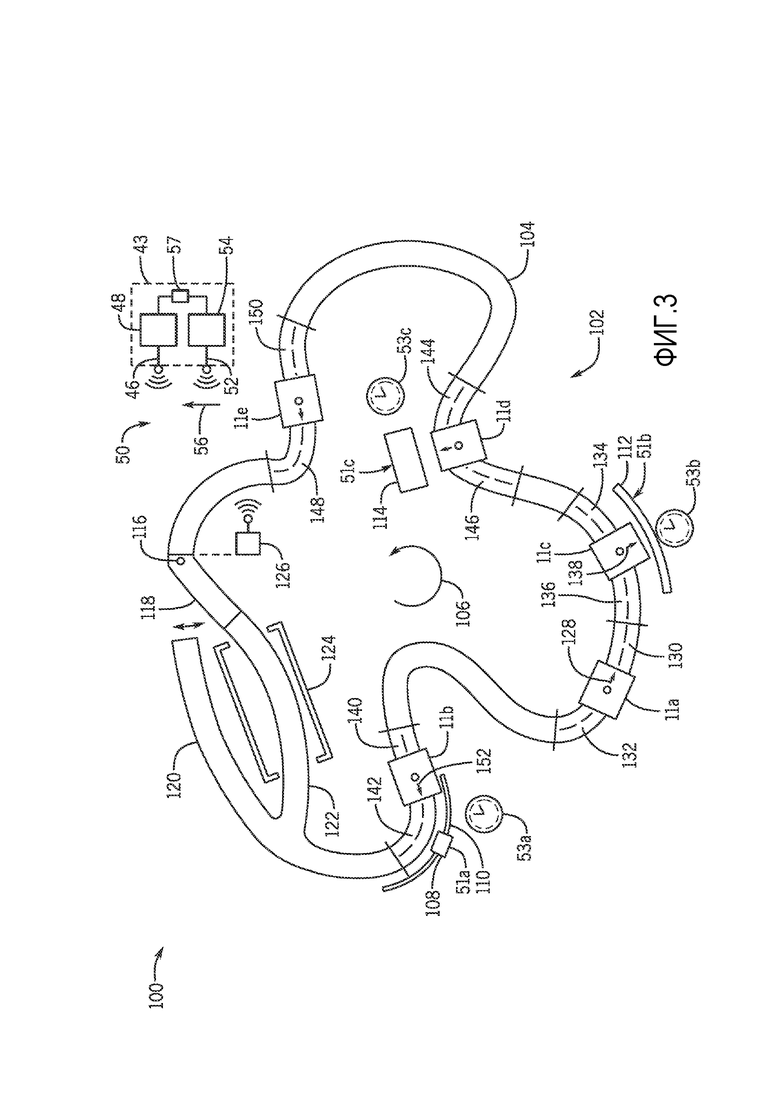
Фиг.3 иллюстрирует вариант осуществления системы 100 управления катанием, которая включает в себя пять транспортных средств 11a, 11b, 11c, 11d, 11e (например, таких, как транспортное средство 11 на фиг.1), передвигающихся по трассе 102. Трасса 102 включает в себя трек 104 (например, такой, как трек 80 на фиг.2), и транспортные средства 11a, 11b, 11c, 11d, 11e передвигаются по треку 104 в общем направлении против часовой стрелки 106. Трасса 102 также включает в себя три развлекательных мероприятия 51a, 51b, 51c (например, таких, как развлекательное мероприятие 51 на фиг.1), представляющих собой три типа развлекательных мероприятий. Развлекательное мероприятие 51а представляет собой развлекательное мероприятие с движущимся развлекательным элементом, например, с роботом 108, который передвигается по треку 110 мероприятия. Развлекательное мероприятие 51b представляет собой развлекательное мероприятие с проекцией кинофильма на экран 112. Развлекательное мероприятие 51c представляет собой развлекательное мероприятие с аниматрониками, например, с ходячим динозавром 114. Развлекательные мероприятия 51a, 51b, 51c включают в себя соответствующие часы 53a, 53b, 53c. Следует отметить, что данные развлекательные мероприятия 51а, 51b, 51с являются примерами в иллюстративных целях и не предназначены быть ограничивающими. Следует также отметить, что трасса 102 показана на фиг.3 с целью иллюстрации системы 100 управления катанием и не предназначена быть ограничивающей в отношении своих элементов. Например, на трассе 102 может находиться менее или более пяти транспортных средств 11a, 11b, 11c, 11d, 11e. Кроме того, на трассе 102 может быть менее или более трех развлекательных мероприятий 51a, 51b, 51c. Схема трека 80 также может отличаться от той, что показана на фиг.3.
Система 100 управления катанием включает в себя системный контроллер 43. Системный контроллер 43 включает в себя основной контроллер 48, соединенный с основным приемопередатчиком 46, и резервный контроллер 54, соединенный с резервным приемопередатчиком 52. В показанном варианте осуществления основной контроллер 48 и резервный контроллер 54 соединены друг с другом через двунаправленную схему голосования 57. Основная беспроводная сеть 50 включает в себя основной контроллер 48 и пять контроллеров 20a, 20b, 20c, 20d, 20e транспортных средств. Резервная беспроводная сеть 56 включает в себя резервный контроллер 54 и пять контроллеров 20a, 20b, 20c, 20d, 20e транспортных средств.
Основной контроллер 48 управляет работой развлекательных мероприятий 51а, 51b, 51с. Кроме того, основной контроллер 48 управляет работой переключателя 116 трека. Переключатель 116 трека выполнен с возможностью перевода моста 118 трека для соединения с основным путем 120 (например, трека 104) или с альтернативным путем 122. Альтернативный путь 122 может включать в себя станцию технического обслуживания 124. Таким образом, управляя переключателем 116 трека, можно направлять транспортное средство (например, транспортное средство 11a, 11b, 11c, 11d или 11e) либо по основному пути 120 в обычном режиме, либо по альтернативному пути 122 для технического обслуживания или в других целях (например, в целях обеспечения разнообразия катания). Переключатель 116 трека может быть соединен с основным контроллером 48 любыми подходящими средствами, например, проводными, беспроводными или их комбинациями. Например, переключатель 116 трека может включать в себя приемопередатчик 126, беспроводным образом соединенный с основным приемопередатчиком 46, ввиду чего основная беспроводная сеть 50 также будет включать в себя переключатель 116 трека.
В процессе работы основной контроллер 48 осуществляет мониторинг и управляет движением каждого транспортного средства 11a, 11b, 11c, 11d, 11e независимо. То есть основной контроллер 48 может управлять каждым транспортным средством 11a, 11b, 11c, 11d, 11e с тем, чтобы они имели разный профиль движения вдоль трека 104. Профиль движения включает в себя, но не ограничивается этим, передвижение с определенной скоростью в определенной точке на треке 104, синхронизацию с развлекательным мероприятием на определенной скорости показа развлекательного мероприятия в случае остановки из-за перекрытия зон блокировки с другими транспортными средствами, в случае передвижения по альтернативному пути 122 или при любой комбинации этих случаев. Следующие неисключительные примеры в отношении пяти транспортных средств 11a, 11b, 11c, 11d, 11e могут помочь проиллюстрировать работу системы 100 управления катанием.
Транспортное средство 11a передвигается по треку 104, пройдя развлекательное мероприятие 51а, но еще не добравшись до развлекательного мероприятия 51b. Стрелка 128 указывает направление, лицом к которому обращены один или несколько пассажиров транспортного средства 11a в соответствии с ориентацией транспортного средства 11a. В данном случае стрелка 128 указывает в направлении движения транспортного средства 11a, т. е. вперед. Через основную беспроводную сеть 50 основной контроллер 48 осуществляет мониторинг состояния транспортного средства 11a, например, мониторинг положения, скорости, динамической зоны блокировки, выходной мощности двигателя, состояния нагрузки или т. п. Передняя область 130 впереди транспортного средства 11a и задняя область 132 позади транспортного средства 11a иллюстрируют динамические зоны блокировки транспортного средства 11a. Аналогичным образом транспортное средство 11c, находящееся впереди транспортного средства 11a, имеет переднюю динамическую зону 134 блокировки и заднюю динамической зону 136 блокировки. Следует отметить, что в некоторых ситуациях, определенная зона блокировки (например, зона 136 блокировки) может соответствовать границе транспортного средства. Например, задняя зона блокировки для конкретного транспортного средства или в некоторой ситуации может быть приведена в соответствие с физической задней границей транспортного средства.
Как видно из данного чертежа, если передняя динамическая зона 130 блокировки транспортного средства 11a начинает перекрываться с задней динамической зоной 136 блокировки транспортного средства 11c, то транспортное средство 11a может столкнуться или уже сталкивается с транспортным средством 11c. При обнаружении такого перекрытия динамических зон 130 и 136 блокировки основной контроллер 48 может посылать команды транспортному средству 11a на замедление или остановку, пока транспортное средство 11с находится в процессе просмотра развлекательного мероприятия 51b. В то же время, поскольку передняя и задняя динамические зоны 140, 142 блокировки транспортного средства 11b, передняя и задняя динамические зоны 144, 146 блокировки транспортного средства 11d и передняя и задняя динамические зоны 148, 150 блокировки транспортного средства 11e не перекрываются с никакими динамическими зонами блокировки никаких других транспортных средств, основной контроллер 48 может посылать команды транспортным средствам 11b, 11d и 11e на поддержание их соответствующих движений вдоль трека 104 без необходимости остановки. В других случаях, в которых динамические зоны блокировки двух соседних транспортных средств начинают перекрываться, основной контроллер 48 может посылать команды на ускорение транспортному средству, находящемуся впереди, или посылать команды на остановку обоим транспортным средствам во избежание столкновения между этими двумя транспортными средствами, сохраняя при этом движение вдоль трека 104 других транспортных средств.
Транспортное средство 11c, как показано на данном чертеже, находится в процессе просмотра развлекательного мероприятия 51b. Поскольку экран 112 расположен по правой стороне трека 104, основной контроллер 48 может посылать команды транспортному средству 11c на управление пассажирской платформой 14c, чтобы развернуть ее лицом к экрану 112. Как уже говорилось выше, основной контроллер 48 может синхронизировать движение транспортного средства 11c с развлекательным мероприятием 51b с помощью часов 42 транспортного средства и часов 53 мероприятия. Например, развлекательное мероприятие 51b может имитировать ощущение наблюдения с космического корабля, пролетающего по галактике с множеством звезд. Развлекательное мероприятие 51b может проецировать небольшой кинофильм, показывающий летящий космический корабль и звезды. Контроллер 20c транспортного средства может управлять пассажирской платформой 14c, чтобы осуществлять ее движение в соответствии со сценами кинофильма, давая пассажиру ощущение нахождения в космическом корабле, пролетающем через звезды. Соответствующие движения могут включать в себя, например, крен и рыскание для имитации поворотов космического корабля, наклоны и подъемы для имитации ускорения космического корабля, вращения для имитации вращательных движений космического корабля и т. д.
Основной контроллер 48 может синхронизировать движение транспортного средства 11c с изображениями кинофильма подобно тому, как изложено выше. Аналогичным образом основной контроллер 48 может обеспечивать измененное положение пассажиров при просмотре относительно движения по треку 104 путем поворота транспортного средства при прохождении развлекательного мероприятия 51b (например, путем разворота пассажиров к развлекательному мероприятию 51b). Однако, при приближении к развлекательному мероприятию 51b скорости транспортных средств 11a, 11b, 11c, 11d, 11e могут отличаться ввиду таких факторов, как состояние нагрузки (например, вес или количество пассажиров). Основной контроллер 48 может синхронизировать движение каждого транспортного средства 11a, 11b, 11c, 11d, 11e с развлекательным мероприятием 51b по-разному. Например, основной контроллер 48 может отрегулировать скорость показа или запуск кинофильма с тем, чтобы соответствовать движениям (например, передвижению по треку 104 и внутреннему движению пассажирской платформы 14c) каждого транспортного средства 11a, 11b, 11c, 11d, 11e. В качестве альтернативы основной контроллер 48 может отрегулировать движение каждого транспортного средства 11a, 11b, 11c, 11d, 11e в соответствии со скоростью показа кинофильма в течение соответствующего времени взаимодействия.
Транспортное средство 11b, как показано на данном чертеже, находится в процессе просмотра развлекательного мероприятия 51a. Развлекательное мероприятие 51а может включать в себя последовательность движений робота 108 на треке 110 мероприятия. Основной контроллер 48 может управлять одним или обоими движениями транспортного средства 11b и движениями робота 108 с целью синхронизации. Например, основной контроллер 48 может регулировать скорость передвижения транспортного средства 11b и/или скорость внутреннего движения транспортного средства 11b (например, настраивая ориентацию 152 пассажирской платформы 14а относительно основания 12a) в соответствии с рабочей скоростью последовательности движений робота 108. Подобно тому, как изложено выше, основной контроллер 48 может синхронизировать развлекательное мероприятие 51а с разными транспортными средствами 11a, 11b, 11c, 11d, 11e по-разному, например, настраивая рабочую скорость на разные значения в соответствии с разными скоростями передвижения транспортных средств 11a, 11b, 11c, 11d, 11e. В качестве конкретного примера скорость робота 108 на треке 110 мероприятия может быть синхронизирована со скоростью транспортного средства 11b на треке 104.
Транспортное средство 11d, как показано на данном чертеже, находится в процессе просмотра развлекательного мероприятия 51c. Развлекательное мероприятие 51c может включать в себя объекты мероприятия с участием аниматроников, например, ходячего динозавра 114. Как и в случае других развлекательных мероприятий, описанных выше, основной контроллер 48 может управлять одним или обоими движениями транспортного средства 11d и движениями динозавра 114, включая любые другие специальные эффекты (например, звуковые, визуальные, водные, пневматические), с целью синхронизации. Синхронизация также может быть настроена и по отношению к каждому транспортному средству 11a, 11b, 11c, 11d, 11e.
Транспортное средство 11e, как показано на данном чертеже, приближается к переключателю 116 трека. Основной контроллер 48 может осуществлять мониторинг состояния транспортного средства 11e, чтобы определять, какой путь, основной путь 120 или альтернативный путь 122, следует выбрать транспортному средству 11e. Этот выбор может зависеть по меньшей мере от таких факторов, как необходимость технического обслуживания для транспортного средства 11e, расстояние между транспортными средствами 11a, 11b, 11c, 11d, 11e и т. д. Основной контроллер 48 может определять необходимость технического обслуживания для транспортного средства 11e на основе характера состояния нагрузки или выходной мощности двигателя. Как уже обсуждалось выше, контроллер транспортного средства 11e может записывать данные о состоянии транспортного средства 11e, такие как состояние нагрузки и выходная мощность двигателя, в течение определенного периода времени. Такие данные могут передаваться основному контроллеру 48 по основной беспроводной сети 50. Основной контроллер 48 может сравнивать собранные данные с предварительно определенным порогом состояния нагрузки или выходной мощности двигателя, чтобы определять для транспортного средства 11e необходимость планирования технического обслуживания. Например, основной контроллер 48 может вычислять общее состояние нагрузки транспортного средства 11e с помощью умножения веса нагрузки за прогон на количество прогонов в течение определенного периода, а затем сравнивать общее состояние нагрузки с пороговой величиной. Если общее состояние нагрузки превышает пороговое значение, то транспортному средству 11e необходимо пройти техническое обслуживание. В противном случае, транспортное средство 11e не нуждается в техническом обслуживании. Однако, предполагается, что основной контроллер 48 может использовать любой подходящий способ для определения необходимости технического обслуживания для транспортного средства 11e. Поскольку статистические данные, такие как состояние нагрузки или выходная мощность двигателя в течение определенного периода времени, могут различаться для транспортных средств 11a, 11b, 11c, 11d, 11e, основной контроллер 48 может обеспечивать индивидуальный анализ и определение необходимости технического обслуживания для каждого транспортного средства 11a, 11b, 11c, 11d, 11e.
Кроме того, основной контроллер 48 может обеспечивать оптимизацию предупредительного технического обслуживания для каждого транспортного средства 11a, 11b, 11c, 11d, 11e. Как изложено выше, основной контроллер 48 может записывать и анализировать необходимость технического обслуживания для каждого транспортного средства 11a, 11b, 11c, 11d, 11e в течение определенного периода времени. На основе этих данных основной контроллер 48 может определять, когда потребуется следующее техническое обслуживание. Например, в вышеприведенном примере основной контроллер 48 может вычислить разность между пороговой величиной и общим состоянием нагрузки транспортного средства 11e, и разделить эту разность на средний вес нагрузки за прогон, чтобы оценить количество прогонов до следующего технического обслуживания. Основной контроллер 48 может дополнительно обеспечивать напоминающие сообщения о времени следующего технического обслуживания.
После определения необходимости технического обслуживания для транспортного средства 11e основной контроллер 48 может управлять переключателем 116 трека, чтобы направить транспортное средство 11e соответственно либо по основному пути 120, либо по альтернативному пути 122. Например, если транспортному средству 11e необходимо техническое обслуживание, то основной контроллер 48 может управлять переключателем 116 трека для соединения моста 118 трека с альтернативным путем 122, чтобы транспортное средство 11e попало на станцию технического обслуживания 124. После того, как транспортное средство 11e оказалось на альтернативном пути 122, основной контроллер 48 может управлять переключателем 116 трека с целью перевода моста 118 трека в обратное положение для соединения с основным путем 120. Во время такого процесса основной контроллер 48 может давать указание остальным транспортным средствам сохранять свои рабочие состояния без опасности столкновения с транспортным средством 11e.
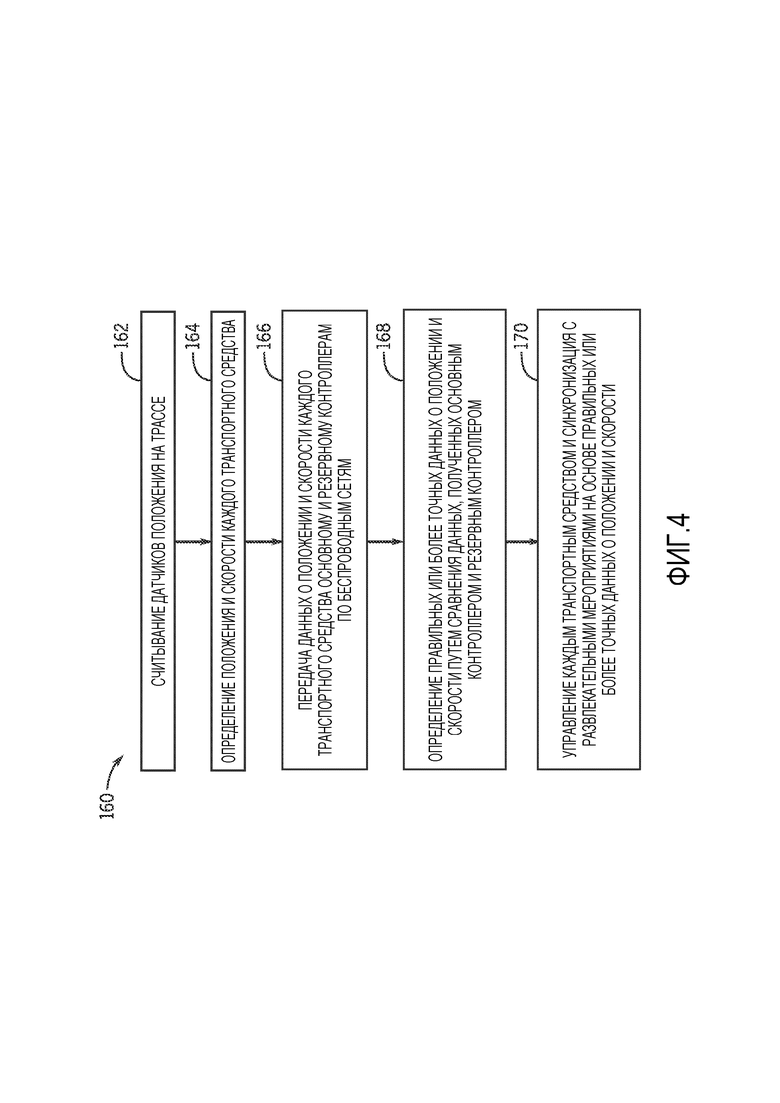
Фиг.4 иллюстрирует способ 160 для мониторинга и управления множеством транспортных средств 11 на трассе в соответствии с настоящим изобретением. Способ 160 включает в себя считывание датчиков 88 положения на трассе (блок 162) каждым из множества транспортных средств 11 или центральным монитором для определения положения и скорости соответствующего транспортного средства 11 (блок 164). Также могут быть определены и другие данные, отражающие состояние каждого из множества транспортных средств 11, такие как выходная мощность двигателя, состояние нагрузки и т.д.
После чего указанные данные, отражающие состояние каждого из множества транспортных средств 11, включая положение и скорость, могут быть переданы основному контроллеру 48 и резервному контроллеру 54 соответственно через основную беспроводную сеть 50 и резервную беспроводную сеть 56 (блок 166). Основной контроллер 48 соединен с резервным контроллером 54 через двунаправленную схему 57 голосования. Двунаправленная схема 57 голосования выполнена с возможностью сравнения двух наборов данных (например, данных о положении или данных о скорости) для каждого из множества транспортных средств 11, получаемых соответственно основным контроллером 48 и резервным контроллером 54. Затем двунаправленная схема голосования может определять правильный или более точный набор данных (блок 168). Двунаправленная схема голосования может включать в себя процессор или контур с возможностью выполнения алгоритма, который анализирует достоверность и надежность данных на основе статистических данных, или прогнозирующих расчетов, или на основе лишь доступных данных. Например, двунаправленная схема голосования может выбирать данные для использования на основе предоставляемых и неискаженных (например, находящихся в пределах заранее определенных значений) данных.
В соответствии с определенными данными основной контроллер 48 независимо посылает команды каждому из множества транспортных средств 11 с целью управления движением каждого из множества транспортных средств 11 (блок 170). Указанное движение включает в себя внешние движения каждого из множества транспортных средств 11, такие как изменение скорости передвижения по трассе и остановка. Кроме того, указанное движение включает в себя внутренние движения каждого из множества транспортных средств 11, такие как крен, наклон и рыскание соответствующей пассажирской платформы 14 относительного соответствующего основания 12 каждого из множества транспортных средств 11. Например, основной контроллер 48 может дать указание первому транспортному средству из множества транспортных средств 11 замедлиться или остановиться, если он обнаруживает, что динамическая зона блокировки первого транспортного средства начинает перекрываться с динамической зоной блокировки второго транспортного средства, передвигающегося впереди первого транспортного средства. В то же время основной контроллер 48 может давать указание другим транспортным средствам из множества транспортных средств 11 на сохранение своих профилей движения.
Основной контроллер 48 также управляет работой одного или более развлекательных мероприятий 51 вдоль трассы. В соответствии с настоящим изобретением основной контроллер 48 может независимо осуществлять синхронизацию движения каждого из множества транспортных средств 11 с одним или несколькими развлекательными мероприятиями 51 (блок 170). Указанная синхронизация может зависеть по меньшей мере от состояния каждого из множества транспортных средств 11, например, от скорости передвижения и состояния нагрузки.
По сравнению с традиционными системами варианты осуществления настоящего изобретения позволяют упростить сложную электропроводку, сократить число датчиков, облегчить интеграцию, а также снизить затраты на техническое обслуживание. Кроме того, варианты осуществления настоящего изобретения облегчают независимое управление движением отдельных транспортных средств для катания на одной трассе. Варианты осуществления настоящего изобретения также облегчают синхронизацию отдельного транспортного средства для катания с развлекательными мероприятиями. Например, когда транспортное средство для катания имеет меньшую нагрузку, что может способствовать более быстрому его передвижению, варианты осуществления настоящего изобретения могут либо отрегулировать скорость этого конкретного транспортного средства, либо иным образом настроить развлекательные мероприятия с целью компенсации разницы, не оказывая при этом влияния на другие транспортные средства для катания. Варианты осуществления настоящего изобретения также облегчают динамическую регулировку дистанции между транспортными средствами, определение нагрузки транспортного средства и планирование технического обслуживания.
Несмотря на то, что в данном документе были проиллюстрированы и описаны только определенные особенности, для специалистов в данной области техники будут очевидны многочисленные модификации и изменения. Поэтому следует понимать, что прилагаемая формула изобретения предназначена для охвата всех таких модификаций и изменений, как попадающих в сущность настоящего изобретения.
Система (10) управления катанием включает в себя множество транспортных средств (11) для катания, расположенных на трассе. Каждое из транспортных средств (11) включает в себя контроллер (20) транспортного средства, выполненный с возможностью управления движением соответствующего транспортного средства (11), систему (34) отслеживания положения, выполненную с возможностью облегчения определения местоположения соответствующего транспортного средства (11), и приемопередатчик (44) транспортного средства, связанный с контроллером (20) транспортного средства. Система (10) управления катанием включает в себя основной контроллер (48) и связанный с ним основной приемопередатчик (46), а также основную беспроводную сеть (50), образованную приемопередатчиком (44) транспортного средства и основным приемопередатчиком (46), чтобы включать в себя по меньшей мере основной контроллер (48) и контроллеры (20) всех транспортных средств (11). Основной контроллер (48) выполнен с возможностью приема данных, указывающих местоположение каждого транспортного средства (11), от соответствующих транспортных средств (11) через основную беспроводную сеть (50). Основной контроллер (48) и контроллеры (20) всех транспортных средств (11) выполнены с возможностью обеспечения контура управления для каждого транспортного средства (11) на основе данных, указывающих их местоположения. 3 н. и 17 з.п. ф-лы, 4 ил.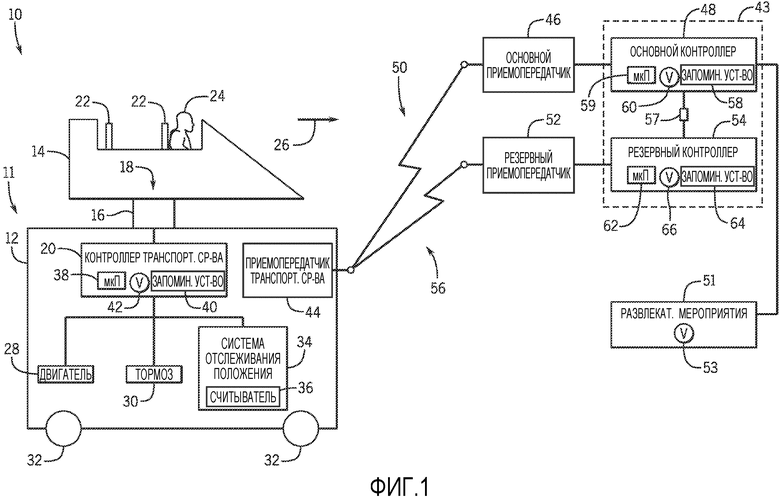
1. Система катания, содержащая:
первое транспортное средство для катания и второе транспортное средство для катания, которые расположены на трассе и выполнены с возможностью передвижения по трассе;
систему управления, содержащую по меньшей мере один контроллер и по меньшей мере одну систему отслеживания положения, при этом по меньшей мере один контроллер выполнен с возможностью управления движением первого и второго транспортных средств для катания, а по меньшей мере одна система отслеживания положения выполнена с возможностью облегчения определения первого местоположения и второго местоположения соответственно первого и второго транспортных средств для катания на трассе; и
беспроводную сеть, выполненную с возможностью обеспечения связи между компонентами системы катания, причем по меньшей мере один контроллер выполнен с возможностью приема данных, указывающих первое и второе местоположения соответственно первого и второго транспортных средств для катания, при этом по меньшей мере один контроллер определяет контур управления для первого и второго транспортных средств для катания на основе данных, указывающих первое и второе местоположения, и по меньшей мере один контроллер выполнен с возможностью обработки данных, указывающих первое и второе местоположения, для синхронизации одного или более элементов мероприятий с первым и вторым местоположениями.
2. Система катания по п.1, в которой по меньшей мере один контроллер содержит основной контроллер, первый контроллер катания, соответствующий первому транспортному средству для катания, и второй контроллер катания, соответствующий второму транспортному средству для катания, при этом основной контроллер и первый контроллер катания выполнены с возможностью координации с целью управления движением первого транспортного средства для катания, а основной контроллер и второй контроллер катания выполнены с возможностью координации с целью управления движением второго транспортного средства для катания.
3. Система катания по п.2, в которой по меньшей мере один контроллер дополнительно содержит резервный контроллер, выполненный с возможностью приема данных, указывающих первое и второе местоположения соответственно первого и второго транспортных средств для катания, при этом резервный контроллер и первый контроллер катания выполнены с возможностью координации с целью управления движением первого транспортного средства для катания, причем резервный контроллер и второй контроллер катания выполнены с возможностью координации с целью управления движением второго транспортного средства для катания, при этом система управления содержит двунаправленную схему голосования, выполненную с возможностью выбора между данными, получаемыми основным контроллером, и данными, получаемыми резервным контроллером.
4. Система катания по п.1, в которой первое транспортное средство для катания содержит первый приемопередатчик, второе транспортное средство для катания содержит второй приемопередатчик, а по меньшей мере один контроллер содержит основной контроллер, содержащий основной приемопередатчик, при этом беспроводная сеть обеспечивает связь между основным приемопередатчиком и первым приемопередатчиком, а также между основным приемопередатчиком и вторым приемопередатчиком.
5. Система катания по п.1, содержащая первый считыватель первого транспортного средства для катания, второй считыватель второго транспортного средства для катания, а также множество датчиков положения по меньшей мере одной системы отслеживания положения, при этом множество датчиков положения расположено по всей трассе, причем первый и второй считыватели связаны с по меньшей мере одним контроллером, при этом каждый датчик положения из множества датчиков положения считывается первым и вторым считывателями, и первый и второй считыватели после считывания первого и второго датчиков положения из множества датчиков положения передают по меньшей мере одному контроллеру данные, указывающие первое и второе местоположения, или сигнал данных, указывающих первое и второе местоположения.
6. Система катания по п.1, в которой первое транспортное средство для катания содержит платформу и основание, при этом платформа выполнена с возможностью поворота относительно основания в направлении крена, в направлении тангажа, в направлении рыскания или любой их комбинации, причем первое местоположение первого транспортного средства для катания содержит линейную составляющую основания относительно трассы и вращательную составляющую платформы относительно основания в направлении крена, в направлении тангажа или в направлении рыскания.
7. Система катания по п.6, в которой по меньшей мере один контроллер выполнен с возможностью синхронизации одного или более элементов мероприятий с линейной составляющей первого местоположения, вращательной составляющей первого местоположения или с обоими составляющими.
8. Система катания по п.1, в которой по меньшей мере один контроллер выполнен с возможностью определения необходимости технического обслуживания для первого транспортного средства для катания, второго транспортного средства для катания или для обоих на основе характера работы первого транспортного средства для катания, второго транспортного средства для катания или обоих.
9. Система катания по п.1, в которой контур управления определяется, по меньшей мере частично, на основе характеристик одного или более элементов мероприятий.
10. Система катания по п.1, в которой по меньшей мере один контроллер получает данные, указывающие первую и вторую скорости соответственно первого и второго транспортных средств для катания, при этом соответствующий контроллер выполнен с возможностью синхронизации одного или более элементов мероприятий с первой скоростью и второй скоростью.
11. Система катания по п.1, в которой по меньшей мере один контроллер получает данные, указывающие первую и вторую скорости соответственно первого и второго транспортных средств для катания, при этом соответствующий контроллер выполнен с возможностью определения контура управления, по меньшей мере частично, на основе первой скорости и второй скорости.
12. Система катания, содержащая:
первое транспортное средство для катания и второе транспортное средство для катания, которые занимают соответственно первое и второе местоположения на трассе и которые выполнены с возможностью передвижения по трассе;
систему управления, содержащую основной контроллер, резервный контроллер и двунаправленную схему голосования, причем:
основной контроллер выполнен с возможностью приема первого набора данных, указывающих первое и второе местоположения соответственно первого и второго транспортных средств для катания;
резервный контроллер выполнен с возможностью приема второго набора данных, указывающих первое и второе местоположения соответственно первого и второго транспортных средств для катания; и
двунаправленная схема голосования выполнена с возможностью выбора между первым набором данных и вторым набором данных с целью обеспечения для системы управления возможности сформировать контур управления для первого транспортного средства для катания и второго транспортного средства для катания, при этом система управления управляет движением первого транспортного средства для катания и второго транспортного средства для катания на основе контура управления.
13. Система катания по п.12, содержащая первый считыватель первого транспортного средства для катания, второй считыватель второго транспортного средства для катания и систему отслеживания положения, выполненную с возможностью определения первого и второго местоположений, причем система отслеживания положения содержит множество датчиков положения, расположенных вдоль трассы, при этом первый и второй считыватели выполнены с возможностью передачи первого набора данных, второго набора данных или обоих наборов основному контроллеру, резервному контроллеру или обоим контроллерам.
14. Система катания по п.13, содержащая первый приемопередатчик транспортного средства, соответствующий первому транспортному средству для катания, и второй приемопередатчик транспортного средства, соответствующий второму транспортному средству для катания, причем первый и второй считыватели передают первый набор данных, второй набор данных или оба набора данных основному контроллеру посредством первого приемопередатчика транспортного средства и второго приемопередатчика транспортного средства.
15. Система катания по п.12, в которой первое транспортное средство для катания содержит платформу и основание, при этом платформа выполнена с возможностью поворота относительно основания в направлении крена, в направлении тангажа или в направлении рыскания, причем первое местоположение первого транспортного средства для катания содержит линейную составляющую основания относительно трассы и вращательную составляющую платформы относительно основания в направлении крена, в направлении тангажа или в направлении рыскания.
16. Система катания по п.12, содержащая беспроводную сеть, выполненную с возможностью облегчения связи между по меньшей мере двумя из следующих компонентов: основной контроллер, резервный контроллер, двунаправленная схема голосования, первый приемопередатчик или первый контроллер катания первого транспортного средства для катания, второй приемопередатчик или второй контроллер катания второго транспортного средства для катания, первый считыватель положения первого транспортного средства для катания или второй считыватель положения второго транспортного средства для катания.
17. Система катания по п.16, в которой основной контроллер, резервный контроллер или оба контроллера имеют связь с первым приемопередатчиком или первым контроллером катания, а также со вторым приемопередатчиком или вторым контроллером катания для формирования контура управления.
18. Система катания по п.12, в которой основной контроллер содержит основной приемопередатчик, а резервный контроллер содержит резервный приемопередатчик.
19. Способ управления первым транспортным средством для катания и вторым транспортным средством для катания на трассе с применением системы управления, при котором:
определяют первое местоположение первого транспортного средства для катания и второе местоположение второго транспортного средства для катания;
передают основному контроллеру первый набор данных, указывающий первое и второе местоположения;
передают резервному контроллеру второй набор данных, указывающий первое и второе местоположения;
осуществляют выбор управляющего набора данных между первым и вторым наборами данных;
формируют контур управления на основе управляющего набора данных; и
управляют движением первого и второго транспортных средств для катания в соответствии с контуром управления.
20. Способ по п.19, при котором при определении первого местоположения первого транспортного средства для катания и второго местоположения второго транспортного средства для катания:
определяют первую линейную составляющую для первого основания первого транспортного средства для катания относительно трассы;
определяют первую вращательную составляющую для первой платформы первого транспортного средства для катания относительно первого основания, при этом первая вращательная составляющая содержит первый угол крена, первый угол тангажа или первый угол рыскания;
определяют вторую линейную составляющую для второго основания второго транспортного средства для катания относительно трассы;
определяют вторую вращательную составляющую для второй платформы второго транспортного средства для катания относительно второго основания, причем вторая вращательная составляющая содержит второй угол крена, второй угол тангажа или второй угол рыскания;
при этом при управлении движением первого и второго транспортных средств для катания в соответствии с контуром управления управляют первой линейной составляющей, первой вращательной составляющей, второй линейной составляющей и второй вращательной составляющей.
| US 5583844 A, 10.12.1996 | |||
| JP 2014000169 A, 09.01.2014 | |||
| Композиция для изготовления гипсобетонных изделий | 1980 |
|
SU893932A1 |
| Транспортное средство | 1981 |
|
SU1002179A1 |

