ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0001] Настоящее раскрытие, в целом, относится к механизму управления движением и, более конкретно, к системам и способам для торможения или продвижения передвижного транспортного средства.
[0002] Этот раздел предназначен для представления читателю различных аспектов области техники, которые могут быть связаны с различными аспектами настоящих технологий, которые описаны и/или заявлены ниже. Это обсуждение, предполагается, быть полезным в обеспечении читателя справочной информацией для лучшего понимания различных аспектов настоящего раскрытия. Соответственно, должно быть понятно, что эти положения должны рассматриваться с такой точки зрения, а не как признание предшествующего уровня техники.
[0003] В целом, транспортные средства включают двигатели для приведения в движение транспортных средств между местоположениями. Двигатели чаще всего используются для генерации движущей силы, но некоторые типы двигателей могут использоваться как для ускорения (например, старта), так и для замедления (например, остановки) транспортного средства. В самом деле, существует множество вариантов расположения двигателей, используемых для ускорения и замедления транспортного средства, перевозящего пассажиров. Например, поезда, механизированные американские горки и тому подобное могут использовать один или несколько электрических двигателей с вращающимися элементами для ускорения и замедления транспортного средства аттракциона или автомобиля вокруг пути. Однако электрические двигатели с вращающимися элементами могут быть подвержены механическим проблемам и значительному времени простоя (например, аттракцион является не работающим) из-за вращающихся элементов.
КРАТКОЕ ОПИСАНИЕ
[0004] В соответствии с вариантом осуществления настоящего раскрытия, движительная система включает в себя одно или несколько передвижных транспортных средств, содержащих реактивную плиту, установленную на нижней части каждого из одного или нескольких передвижных транспортных средств, поверхностную матрицу статоров, установленную с беговой поверхностью для одного или нескольких передвижных транспортных средств, которая содержит множество односторонних линейных асинхронных двигателей (SSLIM), причем каждый из, по меньшей мере, части множества SSLIM включает в себя две обмотки, установленные ортогонально друг другу; множество устройств управления электродвигателем, выполненных с возможностью электрического соединения с множеством SSLIM через панель переключения (коммутационную панель); систему управления, выполненную с возможностью: приема информации, относящейся к одному или нескольким передвижным транспортным средствам; получения желаемого профиля движения для одного или нескольких передвижных транспортных средств по поверхностной матрице статоров; определения, какой из множества SSLIM активировать, и характеристик множества SSLIM на основе требуемого профиля движения, информации или некоторой их комбинации; и отправки управляющих сигналов на множество устройств управления электродвигателем для управления множеством SSLIM для создания профиля движения.
[0005] В соответствии с другим вариантом осуществления настоящего раскрытия, способ включает в себя прием через систему управления информации, относящейся к одному или нескольким передвижным транспортным средствам, расположенным на беговой поверхности поверхностной матрицы статоров, причем поверхностная матрица статоров содержит множество односторонних линейных асинхронных двигателей (SSLIM), каждый из которых включает в себя две обмотки, расположенные ортогонально друг другу, и одно или несколько передвижных транспортных средств содержат реактивную плиту на основе цветных металлов, прикрепленную к нижней части каждого соответствующего передвижного транспортного средства из одного или нескольких передвижных транспортных средств; прием через систему управления требуемого профиля движения для одного или нескольких передвижных транспортных средств по поверхностной матрице статоров; определение посредством системы управления выборки из множества SSLIM для активации, и характеристик выборки из множества SSLIM на основе требуемого профиля движения, информации или некоторой их комбинации; и отправку через систему управления управляющих сигналов на множество устройств управления электродвигателем для управления выборкой из множества SSLIM для создания профиля движения.
[0006] В соответствии с дополнительным вариантом осуществления настоящего раскрытия, движительная система включает в себя систему управления, которая: принимает информацию, относящуюся к одному или нескольким передвижным транспортным средствам, расположенным на беговой поверхности поверхностной матрицы статоров, причем поверхностная матрица статоров содержит множество односторонних линейных асинхронных двигателей (SSLIM), каждый из которых включает в себя две обмотки, расположенные ортогонально друг другу, и одно или несколько передвижных транспортных средств содержат реактивную плиту на основе цветных металлов, прикрепленную к нижней части каждого соответствующего передвижного транспортного средства из одного или нескольких передвижных транспортных средств; принимает требуемый профиль движения для одного или нескольких передвижных транспортных средств по поверхностной матрице статоров; определяет, какой из множества SSLIM активировать, и характеристики множества SSLIM на основе требуемого профиля движения, информации или некоторой их комбинации; и отправляет управляющие сигналы на множество устройств управления электродвигателем для управления множеством SSLIM для создания профиля движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Эти и другие признаки, аспекты и преимущества настоящего раскрытия станут лучше понятными при прочтении последующего подробного описания со ссылкой к прилагаемым чертежам, на которых идентичные символы представляют одинаковые части по всем чертежам, на которых:
[0008] Фиг.1 представляет собой схему движительной системы для управления движением передвижных транспортных средств, которая включает односторонние линейные асинхронные двигатели (SSLIM), систему мониторинга положения, систему управления и матрицу устройств управления электродвигателем в соответствии с вариантом осуществления настоящего раскрытия;
[0009] Фиг.2 представляет собой вид сверху SSLIM по фиг.1 в соответствии с вариантом осуществления настоящего раскрытия.
[0010] Фиг.3 представляет собой блок-схему примера компонентов движительной системы по фиг.1 в соответствии с вариантом осуществления настоящего раскрытия;
[0011] Фиг.4 представляет собой блок-схему процесса управления движением одного или нескольких передвижных транспортных средств с использованием движительной системы по фиг.1 в соответствии с вариантом осуществления настоящего раскрытия;
[0012] Фиг.5 представляет собой схематичное изображение сверху передвижного транспортного средства, имеющего реактивную плиту, расположенную над поверхностной матрицей статоров, в соответствии с вариантом осуществления настоящего раскрытия;
[0013] Фиг.6 представляет собой вид поперечного сечения поверхностной матрицы статоров вдоль сечения 5-5 по фиг.5 в соответствии с вариантом осуществления настоящего раскрытия;
[0014] Фигуры 7-15 представляют собой схематичные изображения сверху, иллюстрирующие способ, которым магнитное поле, создаваемое рядом SSLIM, может быть управляемым для взаимодействия с реактивной плитой передвижного транспортного средства для создания различных векторов тяги в соответствии с вариантом осуществления настоящего раскрытия;
[0015] Фиг.16 представляет собой вид сбоку в разрезе механического тормоза, включенного в передвижное транспортное средство, в соответствии с вариантом осуществления настоящего раскрытия;
[0016] Фиг.17 представляет собой схематичное изображение сверху, представляющее пример компоновки механического тормоза и мест расположения роликов на реактивной плите передвижного транспортного средства в соответствии с вариантом осуществления настоящего раскрытия;
[0017] Фиг.18 представляет собой блок-схему процесса для размещения механического тормоза по фиг.16 в соответствии с вариантом осуществления настоящего раскрытия;
[0018] Фиг.19 представляет собой блок-схему процесса для втягивания механического тормоза по фиг.16 в соответствии с вариантом осуществления настоящего раскрытия;
[0019] Фиг.20 представляет собой блок-схему процесса приложения магнитной силы с использованием SSLIM для удержания передвижного транспортного средства на месте в соответствии с вариантом осуществления настоящего раскрытия.
[0020] Фиг.21 представляет собой блок-схему процесса для освобождения удерживающей магнитной силы с использованием SSLIM для того, чтобы дать возможность передвижному транспортному средству двигаться в соответствии с вариантом осуществления настоящего раскрытия; и
[0021] Фиг.22 представляет собой схематичную диаграмму, иллюстрирующую использование индукционной катушки для сбора энергии для питания бортовой электроники передвижного транспортного средства в соответствии с вариантом осуществления настоящего раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ
[0022] Один или несколько отдельных вариантов осуществления настоящего раскрытия будут описаны ниже. В попытке предоставить краткое описание этих вариантов осуществления, все признаки фактической реализации могут быть не описаны в описании. Должно быть принято во внимание, что при разработке любого такого фактического варианта осуществления, как в любом инженерном или конструкторском проекте, многочисленные специфичные для реализации решения должны приниматься для достижения определенных целей разработчиков, таких как совместимость, с имеющими отношение к системе, и имеющими отношение к коммерческой деятельности ограничениями, которые могут изменяться от одной реализации к другой. Более того, должно быть принято во внимание, что такие усилия разработки могут быть сложными и трудоемкими, но, тем не менее, будут обычным делом конструкции, изготовления, и производства для обычных специалистов, имеющих понимание преимущества этого раскрытия.
[0023] При введении элементов различных вариантов осуществления настоящего раскрытия, указание единственного числа и «упомянутый» предназначены для обозначения того, что имеется один или несколько элементов. Термины «содержащий», «включающий» и «имеющий» предназначены для включения и означают, что могут быть дополнительные элементы, отличные от перечисленных элементов.
[0024] В некоторых приложениях, таких как аттракцион парка культуры и отдыха, большая продолжительность работы (например, аттракцион парка культуры и отдыха работает) является желательной для обеспечения того, чтобы посетители были удовлетворены, предоставляя возможность покататься или испытать аттракцион парка культуры и отдыха. Однако некоторые аттракционы в парке культуры и отдыха используют оборудование для продвижения транспортных средств, такое как вращательные двигатели, которые испытывают сильные механические нагрузки при работе, которые могут со временем изнашиваться на некоторых частях оборудования. Например, вал вращательного двигателя или контактные элементы движительной системы, такие как шины или гусеницы, могут ухудшиться после длительного использования. Кроме того, некоторые передвижные транспортные средства в аттракционах включают в себя бортовое движительное оборудование (например, двигатель и источник питания для двигателя), которое может увеличивать вес транспортного средства, тем самым влияя на его характеристики. В настоящее время признано, что может быть желательно использовать оборудование для продвижения транспортных средств в аттракционах с относительно низкими эксплуатационными расходами и/или удаленное от транспортного средства.
[0025] В настоящее время признано, что может быть желательно использовать электрические двигатели без вращающихся элементов, такие как линейные асинхронные двигатели (LIMs) или линейные синхронные двигатели (LSMs). LIMs и/или LSMs могут ускорять передвижное транспортное средство или автомобиль вдоль дорожки и приводить передвижное транспортное средство или автомобиль в требуемое место. Кроме того, некоторые передвижные транспортные средства могут продвигаться по маршруту и останавливаться по желанию с использованием LIMs и/или LSMs. LIMs и/или LSMs обычно включают в себя электрические двигатели, имеющие статоры и роторы в линейной конфигурации. Вместо того, чтобы создавать крутящий момент с вращающимися элементами, LIMs и LSMs создают силу для перемещения передвижного транспортного средства, создавая линейное магнитное поле, чтобы притягивать или отталкивать магниты или проводники в поле.
[0026] Некоторые варианты осуществления настоящего раскрытия, как правило, относятся к использованию движительной системы, которая включает в себя беговую поверхность (например, пол), которая включает в себя односторонние линейные асинхронные двигатели (SSLIM), и передвижное транспортное средство, которое включает в себя реактивную плиту для взаимодействия с SSLIM. В некоторых вариантах осуществления, передвижные транспортные средства могут не включать в себя систему питания для управления SSLIM (например, система питания может находиться под поверхностью пола), тем самым, уменьшая вес передвижных транспортных средств. Дополнительно, движительная система может использовать относительно небольшое количество движущихся частей, используя SSLIM для продвижения передвижного транспортного средства. Соответственно, одно преимущество, обеспечиваемое использованием раскрытой движительной системы, заключается в сокращении технического обслуживания и времени простоя по сравнению с другими системами. Кроме того, использование SSLIM для перемещения передвижного транспортного средства может быть очень динамичным, поскольку система управления может управлять и регулировать, как каждый SSLIM активируется для перемещения передвижного транспортного средства в любом желаемом направлении и пути. Действительно, могут существовать многочисленные предварительно сконфигурированные профили движения передвижного транспортного средства (например, путь, скорость), которые хранятся в виде инструкций на одном или нескольких материальных компьютерно-читаемых носителях и выполняются одним или несколькими процессорами, по меньшей мере, на основе расположения препятствий или показания направления на беговой поверхности. Если препятствия или показания направления изменены (например, поездка изменена или является тематической для особого события), может быть реализован предварительно сконфигурированный профиль движения передвижного транспортного средства, при этом профиль движения включает в себя инструкции, для которых SSLIM активируется, и когда их активировать на основе пути и скорости передвижного транспортного средства. Дополнительно, профиль движения передвижного транспортного средства может быть динамически отрегулирован на основе ввода от посетителя, занимающего передвижное транспортное средство. Таким образом, другим преимуществом раскрытых вариантов осуществления может быть быстрая регулировка профиля движения или регулировка профиля движения в реальном времени, чтобы предоставить пользователям различные переживания во время поездки или во время последующих поездок.
[0027] С учетом вышеизложенного, фиг.1 представляет собой схему варианта осуществления движительной системы 10 для управления перемещением передвижного транспортного средства 12, которая включает в себя односторонние линейные асинхронные двигатели (SSLIM) 14, систему 16 мониторинга положения, систему 18 управления и матрицу 20 устройств управления электродвигателем в соответствии с вариантом осуществления. Хотя изображено только одно передвижное транспортное средство 12, должно быть понятно, что движительная система 10 может использоваться для управления перемещением многочисленных передвижных транспортных средств 12 (например, между 1 и 10). Как изображено, передвижное транспортное средство 12 расположено на двумерной (например, включая оси x и y) беговой поверхности 22 (например, на полу), которая включает в себя матрицу 24 установленных SSLIM 14. Матрица 24 может упоминаться здесь как поверхностная матрица 24 статоров. SSLIM 14 могут быть сконструированы как блоки плитки для беговой поверхности 22, как подробно описано ниже. Каждое передвижное транспортное средство 12 может считаться автоматическим направляемым транспортным средством (AGV) и может включать в себя реактивную плиту и опорную плиту (например, стальную), прикрепленные к нижней части передвижного транспортного средства 12. Как описано ниже, реактивная плита может включать проводник из цветных металлов (например, алюминия, меди, цинка, сплава из латуни и меди). Каждый из SSLIM 14 может представлять собой статор, а реактивная плита и стальная опорная плита передвижного транспортного средства 12 могут представлять ротор, когда SSLIM 14 и реактивная плита взаимодействуют, вызывая движение передвижного транспортного средства 12. Как подробно описано ниже, поверхностная матрица 24 статоров может управляться с использованием системы 16 мониторинга положения, системы 18 управления и матрицы 20 устройств управления электродвигателем.
[0028] Хотя последующее обсуждение фокусируется на SSLIM 14, используемых в движительной системе 10, следует отметить, что в некоторых вариантах осуществления может использоваться линейный синхронный двигатель (LSM), включающий в себя редкоземельный магнит. В таких вариантах осуществления, статор может включать в себя обмотку электромагнитного двигателя на одной стороне воздушного зазора, а ротор может содержать один или несколько постоянных магнитов на другой стороне воздушного зазора. Например, статор в LSM может быть расположен на беговой поверхности, а ротор может быть расположен на нижней части передвижного транспортного средства 12 или наоборот.
[0029] Возвращаясь к изображенному варианту осуществления, включающему в себя SSLIM 14, количество и размер SSLIM 14, включенных в поверхностную матрицу 24 статоров, расположенную в беговой поверхности 22, может находиться под влиянием одного или нескольких факторов. Например, отношение SSLIM 14 к реактивной плите может влиять на характеристики движения (например, скорость и направление движения) передвижного транспортного средства 12. Большее количество SSLIM 14, взаимодействующих с реактивной плитой, может привести к более точному управлению движением рулевым управлением с уменьшенным ускорением. Напротив, меньшее количество SSLIM 14 на реактивную плиту может привести к более высокому ускорению и грубому управлению движением. Плотность SSLIM 14 в беговой поверхности 22 может быть определена на основе требуемой характеристики передвижного транспортного средства 12. Кроме того, некоторые SSLIM 14s могут быть разных размеров (например, больше), чем другие SSLIM 14. В некоторых вариантах осуществления, различные части беговой поверхности 22 могут включать в себя различные плотности SSLIM 14, чем другие части, в зависимости от требуемой характеристики. Когда SSLIM 14 помещаются в поверхностную матрицу 24 статоров, SSLIM 14 могут активироваться для управления движением передвижного транспортного средства 12.
[0030] В некоторых вариантах осуществления, SSLIM 14 могут быть двунаправленными, потому что каждый SSLIM 14 может включать в себя обмотки 25 и 26, которые расположены или установлены ортогонально друг другу, как изображено на виде сверху SSLIM 14 на фиг.2. Каждая из обмоток 25 и 26 может быть намотана вокруг соответствующего слоистого стального многослойного материала 27 и 28, склеенного вместе для образования SSLIM 14. SSLIM 14s могут быть помещены в планку и заключены в эпоксидную смолу для создания блоков 29 плитки (например, пластмассовых блоков). Блоки 29 плитки, включающие в себя SSLIM 14, могут быть установлены в виде сетчатого рисунка для образования беговой поверхности 22.
[0031] Для продвижения передвижного транспортного средства 12 по беговой поверхности 22, электрический ток может быть приложен к соответствующим обмоткам 25 и 26 SSLIM 14, чтобы толкать передвижное транспортное средство 12 в желаемом направлении. Обмотки 25 и 26 могут генерировать магнитное поле при приложении тока, что может привести к тому, что проводник из цветных металлов, включенный в реактивную плиту, будет создавать противоположное магнитное поле (например, вихревые токи). Противоположные магнитные поля могут отталкивать друг друга и приводить в движение реактивную плиту, тем самым перемещая соответствующее передвижное транспортное средство 12. Величина ускорения передвижного транспортного средства 12 может быть пропорциональна суммарному магнитному полю, создаваемому SSLIM 14. Суммарное магнитное поле может управляться величиной электрического тока, подаваемого на обмотки 25 и 26 SSLIM 14.
[0032] Одна обмотка 25 может обеспечивать первую движущую силу в первом направлении, а другая обмотка 26 может обеспечивать вторую движущую силу во втором направлении, в зависимости от того, как SSLIM 14 расположен в поверхностной матрице 24 статоров. Например, первое направление может быть продольным, а второе направление может быть поперечным. В более конкретном примере, второе направление может быть крестообразным относительно первого направления, например, на 90 градусов и копланарным с первым направлением. Кроме того, каждая обмотка 25 и 26 может обеспечивать прямое и обратное направление тяги путем изменения полярности магнитного поля, обеспечиваемого обмоткой 25 и 26. Таким образом, используя ортогонально расположенные обмотки 25 и 26, каждый из SSLIM 14 может обеспечивать четыре направления тяги по желанию. В результате, SSLIM 14 могут управляться согласованно, чтобы толкать передвижное транспортное средство 12 в любом направлении и/или останавливать передвижное транспортное средство 12 на беговой поверхности 22 по желанию. Таким образом, различные комбинации SSLIM 14 могут быть активированы для обеспечения вектора силы в любом желаемом направлении для перемещения передвижного транспортного средства 12. В некоторых вариантах осуществления, SSLIM 14 могут включать в себя одну обмотку и могут быть расположены ортогонально другому SSLIM 14, который включает в себя одну обмотку.
[0033] Следует отметить, что матрица 20 устройств управления электродвигателем может управлять напряженностью магнитного поля, генерируемого обмотками 25 и 26, в дополнение к полярности, посредством регулировки тока, подаваемого на обмотки 25 и 26. То есть, увеличение тока может привести к излучению более сильного магнитного поля, которое увеличивает ускорение передвижного транспортного средства 12, когда реактивная плита передвижного транспортного средства 12 проходит через магнитное поле. Таким образом, величина и направление магнитного поля могут быть отрегулированы, чтобы управлять скоростью и направлением движения передвижного транспортного средства 12, когда его реактивная плита реагирует на магнитное поле, генерируемое SSLIM 14.
Возвращаясь к фиг.1, может быть множество (например, между 2 и 20) SSLIM 14, расположенных под реактивной плитой в любом заданном положении передвижного транспортного средства 12 на беговой поверхности 22. Для перемещения передвижного транспортного средства 12 в заданном направлении и с определенной скоростью, комбинация SSLIM 14 под реактивной плитой может быть включена и выключена во время, чтобы реагировать с реактивной плитой передвижного транспортного средства 12, когда передвижное транспортное средство 12 пересекает беговую поверхность 22. Например, чтобы перемещать передвижное транспортное средство 12 вперед, один или несколько SSLIM 14, расположенных под левой и правой стороной реактивной плиты, могут быть включены для обеспечения тяги в направлении вперед. В то же время, если желательно заставить передвижной транспортное средство 12 поворачиваться, SSLIM 14, расположенный под передней частью и задней частью реактивной плиты, может быть включен в направлении, перпендикулярном направлению движения вперед. То есть, SLIM 14 в передней части может вызвать тягу влево, а SLIM 14 в задней части вызывает тягу вправо, так что передвижное транспортное средство 12 поворачивается, когда оно движется вперед. Приложение тока к SSLIM 14 по более сложной схеме может, например, привести к искривленному движению передвижного транспортного средства 12 при его перемещении по беговой поверхности 22. Такие сценарии и многочисленные другие примеры движения передвижного транспортного средства 12 описаны ниже.
[0035] Положение передвижных транспортных средств 12 может отслеживаться системой 16 мониторинга положения. Система 16 мониторинга положения может определять информацию о транспортном средстве, связанную с положением и скоростью передвижного транспортного средства 12, и отправлять информацию о транспортном средстве в систему 18 управления. Система 18 управления может определять, какие SSLIM 14 включать и когда их включать, основываясь, по меньшей мере, на информации о транспортном средстве и желаемом профиле движения передвижного транспортного средства 12. Затем, система 18 управления может отправлять управляющие сигналы в матрицу 20 устройств управления электродвигателем для приведения в действие SSLIM 14, соответственно, для продвижения передвижного транспортного средства 12.
[0036] Как отмечалось ранее, раскрытые варианты осуществления могут давать возможность изменения профиля движения передвижных транспортных средств 12, либо динамически (например, на ходу), либо статически (например, на этапе предварительной конфигурации). Например, клиент может использовать беспроводной направленный контроллер для управления передвижным транспортным средством 12, и SSLIM 14 могут управляться соответствующим образом, чтобы толкать передвижное транспортное средство 12 в желаемом направлении. Дополнительно, система 18 управления может хранить несколько предварительно сконфигурированных профилей движения передвижного транспортного средства, которые направляют передвижное транспортное средство 12 вокруг неподвижных препятствий на беговой поверхности 22. Предварительно сконфигурированные профили движения передвижного транспортного средства могут идентифицировать, какие SSLIM 14 активировать и когда их активировать, на основании пути и скорости передвижного транспортного средства 12. Когда препятствия на беговой поверхности 22 переставляются (например, поездка перестраивается), новый профиль движения передвижного транспортного средства может быть предварительно сконфигурирован и выполнен системой 18 управления. Таким образом, некоторые варианты осуществления настоящего раскрытия могут предоставлять посетителю различные впечатления во время каждой поездки.
[0037] Движительная система 10 может включать в себя различные компоненты, которые обеспечивают варианты осуществления, обсужденные выше. Например, фиг.3 представляет собой блок-схему примера компонентов движительной системы 10. Движительная система 10 может включать в себя поверхностную матрицу 24 статоров, одно или несколько передвижных транспортных средств 12, систему 18 управления, систему 16 мониторинга положения и матрицу 20 устройств управления электродвигателем. Как обсуждалось ранее, движительная система 10 может быть выполнена с возможностью управления перемещением передвижного транспортного средства 12 по беговой поверхности 22, где установлена поверхностная матрица 24 статоров. Система 18 управления, система 16 мониторинга положения, матрица 20 устройств управления электродвигателем, передвижное транспортное средство 12 и поверхностная матрица 24 статоров могут включать в себя различные компоненты, которые обеспечивают управляемое движение передвижного транспортного средства 12.
[0038] Система 18 управления может включать в себя процессор 30, память 32, модуль 34 связи и источник 36 питания. Процессор 30, который может быть одним или несколькими процессорами, может быть любого типа компьютерным процессором или микропроцессором, способным выполнять исполняемую процессором программу. Запоминающее устройство 32, которое может представлять собой один или несколько компонентов запоминающего устройства, могут быть любыми подходящими изделиями, которые могут служить в качестве средства для хранения исполняемой процессором программы, данных или тому подобного. Эти изделия производства могут представлять собой материальные, не кратковременные компьютерно-читаемые носители (например, любую подходящую форму материальной памяти или накопителя), которые могут хранить исполняемый процессором код, используемый процессором 30 для управления аспектами раскрытых в настоящее время вариантов осуществления, например, определение того, какие SSLIM 14 активировать, а также величину и направление их магнитных полей. Память 32 также может использоваться для хранения информации о транспортном средстве, принятой от системы 16 мониторинга положения.
[0039] Модуль 34 связи может быть компонентом беспроводной или проводной связи, который может облегчать связь с системой 16 мониторинга положения, передвижным транспортным средством 12 и матрицей 20 устройств управления электродвигателем. По существу, модуль 34 связи может включать в себя беспроводную карту или порт данных (например, соединение локальной сети), способный передавать и принимать данные. Например, после определения того, какие SSLIM 14 активировать и производительности (величины и направления магнитных полей) SSLIM 14, процессор 30 может дать команду модулю 34 связи на отправку командных инструкций (например, идентификатор SSLIM 14, выбор времени активации/деактивации, направление силы, величину прилагаемой силы) матрице 20 устройств управления электродвигателем, которая может подавать электрический ток в SSLIM 14, соответственно. Источник 36 питания может быть любым подходящим источником питания, включая, но, не ограничиваясь этим, батарею, для системы 18 управления.
[0040] Система 16 мониторинга положения может включать в себя процессор 38, память 40, модуль 42 связи и датчик 44. Следует отметить, что хотя система 16 мониторинга положения изображена как отдельный компонент от системы 18 управления, в некоторых вариантах осуществления, система 16 мониторинга положения может быть включена в систему 18 управления. Процессор 38, который может быть одним или несколькими процессорами, может быть любого типа компьютерным процессором или микропроцессором, способным выполнять исполняемую процессором программу. Запоминающее устройство 40, которое может представлять собой один или несколько компонентов запоминающего устройства, могут быть любыми подходящими изделиями, которые могут служить в качестве средства для хранения исполняемой процессором программы, данных или тому подобного. Эти изделия производства могут представлять собой материальные, не кратковременные компьютерно-читаемые носители (например, любую подходящую форму материальной памяти или накопителя), которые могут хранить исполняемый процессором код, используемый процессором 38 для получения информации о транспортном средстве, о передвижном транспортном средстве 12, например, положении и скорости передвижного транспортного средства 12, и передавать информацию о транспортном средстве в систему 18 управления, среди прочего. Память 40 также может использоваться для хранения информации о транспортном средстве, полученной от датчика 44.
[0041] Модуль 42 связи может быть компонентом беспроводной или проводной связи, который может облегчать связь с системой 18 управления и/или передвижным транспортным средством 12. По этой причине, модуль 42 связи может включать в себя беспроводную карту или порт данных (например, соединение локальной сети), способный передавать и принимать данные. Датчик 44 может включать в себя оптическую систему, которая использует камеру, чтобы позволить системе 16 мониторинга положения отслеживать определенную информацию о транспортном средстве (например, положение передвижного транспортного средства 12 и/или скорость передвижного транспортного средства 12). В некоторых вариантах осуществления, процессор 38 и модуль 42 связи могут использовать триангуляцию сигнала (например, радио) для триангуляции сигнала, излучаемого от передвижного транспортного средства 12 через сеть, к которой подключены система 16 мониторинга положения и передвижное транспортное средство 12. После триангуляции, процессор 38 может определить местоположение передвижного транспортного средства 12 на поверхностной матрице 24 статоров. Информация о транспортном средстве, полученная системой 16 мониторинга положения, может быть отправлена в систему 18 управления, которая, в свою очередь, определяет, какие SSLIM 14 активировать/деактивировать, и/или рабочие характеристики (направление и силу магнитных полей) SSLIM 14. Источник 46 питания может быть любым подходящим источником питания, включая, но не ограничиваясь этим, батарею, для системы 16 мониторинга положения.
[0042] Матрица 20 устройств управления электродвигателем может включать в себя множество устройств 48 управления электродвигателем. Устройства 48 управления электродвигателем могут включать в себя частотно-регулируемые приводы (VFD), которые могут управлять силой и направлением магнитного поля (например, в соответствии с направлением и величиной тяги, генерируемой SSLIM 14), посредством изменения входной частоты и напряжения на обмотках SSLIM 14. Количество устройств 48 управления электродвигателем может быть меньше, чем общее количество SSLIM 14, включенных в поверхностную матрицу 24 статоров. То есть, в некоторых вариантах осуществления может не существовать взаимно-однозначного отношения между числом устройств 48 управления электродвигателем и SSLIM 14, поскольку в любой момент времени могут быть активированы только SSLIM 14, используемые в профиле движения передвижного транспортного средства.
[0043] Чтобы разрешить использование меньшего количества устройств 48 управления электродвигателем, чем SSLIM 14, процессор 30 системы 18 управления может мультиплексировать устройства 48 управления электродвигателем для управления только теми SSLIM 14, которые находятся в предварительно сконфигурированном профиле движения передвижного транспортного средства, или динамически определены как находящиеся в профиле движения на основе ввода от пользователя. При определении того, какие из устройств 48 управления электродвигателем мультиплексировать, в одном варианте осуществления, процессор 30 учитывает количество общих обмоток SSLIM 14, необходимое для мотивации передвижного транспортного средства 12 на основе таких факторов, как статическое трение, трение качения, инерция, максимальное ускорение и скорость, и/или ускорение торможения. Система 18 управления может отправлять управляющие сигналы на панель 50 переключения (например, твердотельную панель переключения) матрицы 20 устройств управления электродвигателем для управления устройствами 48 управления электродвигателем для приведения в действие соответствующих SSLIM 14 в определенное время, и непрерывно переключать управление следующими SSLIM 14 в пределах профиля движения транспортного средства для доступных устройств 48 управления электродвигателем для движения передвижного транспортного средства 12 по поверхностной матрице 24 статоров на основе того, где находится передвижное транспортное средство 12. Таким образом, в некоторых вариантах осуществления, количество используемых устройств 48 управления электродвигателем может быть меньше, чем количество SSLIM 14. В одном варианте осуществления, обмотки 25 и 26 SSLIM 14 подключены непосредственно к панели 50 переключения, которая переключает управление SSLIM 14 между устройствами 48 управления электродвигателем и/или непосредственно к устройствам 48 управления электродвигателем. Таким образом, устройства 48 управления электродвигателем могут быть электрически связаны с SSLIM 14. Ремонтопригодность может быть увеличена посредством описанной выше схемы мультиплексирования, которая может уменьшить общее количество аппаратных средств (например, количество приводов) движительной системы 10. Однако в некоторых вариантах осуществления, может использоваться одинаковое количество устройств 48 управления электродвигателем и SSLIM 14.
[0044] Относительно передвижного транспортного средства 12, его компоненты могут включать в себя процессор 52, память 54, модуль 56 связи, механический тормоз 58, источник питания 60, беспроводной направляющий контроллер 62, динамики 64, фары 66, удерживающий замок 68, систему 70 отслеживания положения, ролики 72, реактивную плиту (например, ротор) 74, выпрямитель и стабилизатор 76 напряжения и/или индукционную катушку 79. Процессор 52, который может быть одним или несколькими процессорами, может быть любого типа компьютерным процессором или микропроцессором, способным выполнять исполняемую процессором программу. Запоминающее устройство 54, которое может представлять собой один или несколько компонентов запоминающего устройства, могут быть любыми подходящими изделиями, которые могут служить в качестве средства для хранения исполняемой процессором программы, данных или тому подобного. Эти изделия производства могут представлять собой материальные, не кратковременные компьютерно-читаемые носители (например, любую подходящую форму материальной памяти или запоминающего устройства), которые могут хранить исполняемый процессором код, используемый процессором 52 для выполнения раскрытых в настоящее время способов, например, управления бортовой электроникой (модуль 56 связи, беспроводной контроллер 62 направления, система 70 отслеживания положения 70, динамики 64, фары 66, удерживающие замки 68 и т.д.) и/или тормоз 58. В некоторых вариантах осуществления, память 54 также может использоваться для хранения информации о транспортном средстве, такой как габаритные размеры (например, вес, длина, ширина, высота), скорость, ускорение и так далее.
[0045] Модуль 56 связи может быть компонентом беспроводной или проводной связи, который может облегчать связь с системой 18 управления и/или системой 16 мониторинга положения. По этой причине, модуль 56 связи может включать в себя беспроводную карту, способную передавать и принимать данные. Например, процессор 52 может дать команду модулю 56 связи на отправку информации о транспортном средстве в систему 18 управления, чтобы система 18 управления могла определить, какие SSLIM 14 активировать и как SSLIM 14 следует активировать.
[0046] Для обеспечения движения передвижного транспортного средства 12, передвижное транспортное средство 12 включает в себя реактивную плиту 74, ролики 72 и механический тормоз 58. Движения передвижного транспортного средства 12 могут включать в себя ускорение, замедление, поворот и остановку передвижного транспортного средства 12. Реактивная плита 74 может включать реактивную плиту, включающую плиту проводника из цветных металлов и опорную плиту из железа (например, из стали). В одном варианте осуществления, реактивная плита представляет собой единую непрерывную или монолитную плиту из цветного металла, прикрепленную или установленную на нижней части передвижного транспортного средства 12. В таких вариантах осуществления, реактивная плита может охватывать как можно большую часть нижней поверхности (или, возможно, большей) передвижного транспортного средства 12, чтобы обеспечить достаточную площадь поверхности для взаимодействия с магнитными полями, генерируемыми SSLIM 14. Различные типы цветного материала могут обеспечивать лучшую эффективность, чем другие, из-за проводимости, электрического потока, потока, магнитного поля и тому подобного. Форма реактивной плиты может быть любой подходящей формой, включая круглую, прямоугольную, квадратную или тому подобное. Ролики 72 могут включать в себя любое подходящее оборудование качения, такое как колеса, которые обеспечивают разнонаправленную и неограниченную ориентацию на беговой поверхности 22. В некоторых вариантах осуществления, ролики 72 могут использоваться для поддержания воздушного зазора между статором 14 и реактивной плитой 74, что повышает эффективность движения с использованием SSLIM 14, уменьшая потери энергии из-за трения. В некоторых вариантах осуществления, как описано далее ниже, механический тормоз 58 может включать в себя железную пластину и тормозной материал на железной пластине. Железная пластина притягивается к магнитному полю, создаваемому SSLIM 14 под реактивной плитой, которая тянет тормоз 58 вниз, чтобы контактировать с беговой поверхностью 22. Тормозной материал обеспечивает трение между тормозом 58 и беговой поверхностью 22 для замедления или остановки передвижного транспортного средства 12.
[0047] Как обсуждалось выше, передвижное транспортное средство 12 может не включать в себя систему питания, которая используется для подачи питания на двигатель (SSLIM 14). По существу, передвижное транспортное средство 12 может быть легче других передвижных транспортных средств 12, которые включают в себя систему питания. Однако в некоторых вариантах осуществления, передвижное транспортное средство 12 может включать в себя источник 60 питания, который заряжается использованием энергии, получаемой индукционной катушкой 79 на реактивной плите 74 от магнитного поля SSLIM 14. В некоторых вариантах осуществления, индуцированная энергия может выпрямляться и поддерживаться выпрямителем и стабилизатором 76 напряжения и использоваться для питания бортовой электроники, например, процессора 52, памяти 54, модуля 56 связи, беспроводного контроллера 62 направления, динамиков 64, фар 66, системы 70 отслеживания положения, и/или удерживающих замков 68.
[0048] Динамики 64 и/или фары 66 могут управляться процессором 52 во время определенных участков поездки для улучшения темы поездки или улучшения показа элементов в передвижном транспортном средстве 12. Дополнительно, пользователь может использовать беспроводной контроллер 62 направления для направления передвижного транспортного средства 12 по поверхностной матрице 24 статоров. Например, желаемое направление может быть передано в систему 18 управления, которая может определить, какие SSLIM 14 нужно активировать, чтобы толкать передвижное транспортное средство 12 в желаемом направлении, на основе ввода пользователя. В некоторых вариантах осуществления, беспроводной контроллер 62 направления может быть ограничен, чтобы дать возможность пользователю поворачивать передвижное транспортное средство 12, но фактически не управлять общим направлением движения передвижного транспортного средства 12, или наоборот. Например, пользователь может повернуть передвижное транспортное средство 12 во время поездки, чтобы посмотреть на другую сцену, или выстрелить в цель, но передвижное транспортное средство 12 все еще перемещается по заданному пути. Удерживающие замки 68 могут быть использованы для удержания посетителей в передвижном транспортном средстве 12 (например, когда передвижное транспортное средство 12 находится в движении и/или является неподвижным).
[0049] Система 70 отслеживания положения может осуществлять мониторинг положения передвижного транспортного средства 12 на поверхностной матрице 24 статоров. В одном варианте осуществления, система 70 отслеживания положения взаимодействует с датчиками на поверхностной матрице 24 статоров. Каждый датчик представляет однозначное местоположение (например, координаты относительно одной или нескольких опорных точек) на поверхностной матрице 24 статоров. В таком варианте осуществления, система 70 отслеживания положения включает в себя считыватель, который может считывать датчики для определения положения передвижного транспортного средства 12 на поверхностной матрице 24 статоров. Затем считыватель может предоставить информацию о местоположении в систему 18 управления, которая, в свою очередь, определяет, какие SSLIM 14 активировать и как каждый из них должен быть активирован. В некоторых вариантах осуществления, система 70 отслеживания положения может включать в себя метки радиочастотной идентификации и/или излучаемые лазеры для обеспечения и/или получения информации о положении. В вариантах осуществления, где система 16 мониторинга положения отслеживает информацию о транспортном средстве, используя датчик 44, передвижные транспортные средства 12 могут не включать в себя систему 70 отслеживания положения. Хотя фиг.3 иллюстрирует систему 70 отслеживания на передвижном транспортном средстве 12, в других вариантах осуществления она отсутствует, что обозначено пунктирными линиями. В соответствии с некоторыми вариантами осуществления, определение местоположения транспортного средства выполняется полностью с обочины. В качестве примера, определения на обочине могут быть основаны на системах машинного зрения, расположенных над передвижным транспортным средством 12 и выполненных с возможностью мониторинга местоположения или его позиционирования. Дополнительно, в некоторых вариантах осуществления, только питание и бортовое управление находится на передвижном транспортном средстве 12, что связано с развлечениями (например, световыми и звуковыми эффектами). Торможение в таких вариантах осуществления может управляться пассивно, а ограничения для пассажиров могут приводиться в действие механически. Однако в других вариантах осуществления, удерживающие пассажиров устройства, могут приводиться в действие электрическим способом посредством индукционных захватов. В таких вариантах осуществления, выдерживание навигации и другие средства управления поездкой на обочине (вне передвижного транспортного средства 12) обеспечивает эффективную конструкцию транспортного средства и алгоритмическое управление за пределами борта. Дополнительно или в качестве альтернативы, система 70 отслеживания положения передвижного транспортного средства 12 и система 16 мониторинга положения могут работать совместно, для получения информации о транспортном средстве (например, положении и/или скорости) для отправки в систему 18 управления.
[0050] В некоторых вариантах осуществления, поверхностная матрица 24 статоров может включать в себя SSLIM (статоры) 14 и подачу 78 воздуха. Как обсуждалось ранее, SSLIM 14 могут быть включены в блоки 29 плитки. Блоки 29 плитки могут быть расположены на сетке матрицы 24 на основе требуемой производительности частей поверхностной матрицы 24 статоров (например, более крупные SSLIM 14 могут быть размещены в частях, где желательно высокое ускорение и замедление). Блоки 29 плитки могут быть легко удалены с поверхностной матрицы 24 статоров для обеспечения возможности обслуживания или замены.
[0051] Винил (например, линолеум) может быть помещен поверх каждого из блоков плитки и может использоваться в качестве поверхности износа. Например, один или несколько листов винила могут быть использованы для покрытия блоков плитки. Винил, покрывающий блоки плитки, может служить беговой поверхностью для передвижных транспортных средств 12. В некоторых вариантах осуществления, может существовать определенная величина расстояния между блоками 29 плитки (например, между 0,1 сантиметра и 0,5 сантиметров). Поддержание небольшого воздушного зазора (например, в пределах определенного порогового расстояния) между статором и ротором в линейных асинхронных двигателях может значительно улучшить генерацию вектора тяги и может повысить эффективность двигателя. Таким образом, винил или покрытие, наносимое на блоки 29 плитки, должно быть относительно тонким и неметаллическим.
[0052] В некоторых вариантах осуществления, архитектура поверхностной матрицы 24 статоров может обеспечивать надежную резервную возможность. Например, когда относительно небольшое количество SSLIM 14 не работают должным образом, система 18 управления может управлять смежным SSLIM 14 для создания желаемого магнитного поля. В некоторых сценариях, смежный SSLIM 14 может быть расположен под реактивной плитой 74 или рядом с реактивной плитой 74 и может создавать индукционное поле, которое приводит в движение реактивную плиту 74. Однако в некоторых вариантах осуществления, выключение векторизации касательной силы может привести к тому, что использование смежных SSLIM 14 приведет к менее эффективной продвигающей силе. Это может быть компенсировано в таких сценариях замкнутым контуром обратной связи, который модулирует время и/или ток привода для всех применимых SSLIM 14, что приводит к запланированному профилю движения и требуемому вектору тяги, когда передвижное транспортное средство 12 пересекает поверхностную матрицу 24 статоров. Система 18 управления может использовать замкнутый контур обратной связи для обнаружения потери определенных обмоток SSLIM 14 посредством обратного расчета результирующего движения передвижного транспортного средства 12.
[0053] В некоторых вариантах осуществления, когда ролики 72 не используются, подача 78 воздуха может использоваться для продувки воздуха через отверстия в беговой поверхности 22 и плавания передвижного транспортного средства 12 на воздушной подушке. В этом варианте осуществления, отсутствуют точки контакта между передвижным транспортным средством 12 и беговой поверхностью 22, и SSLIM 14 управляют положением и поворотом передвижного транспортного средства 12. Такой вариант осуществления может увеличивать время безотказной работы (например, аттракцион является рабочим) аттракциона, поскольку имеется меньше компонентов для обслуживания (например, шины, подшипники и колеса).
[0054] Обращаясь теперь к работе движительной системы 10, вариант осуществления процесса 90 для управления транспортировкой одного или нескольких передвижных транспортных средств 12 с использованием движительной системы 10 иллюстрируется блок-схемой на фиг.4. Хотя последующее описание процесса 90 описывается как выполняемое системой 18 управления, следует отметить, что некоторая часть или весь процесс 90 может выполняться другими устройствами управления, которые могут поддерживать связь с системой 18 управления, системой 16 мониторинга положения и/или матрицей 20 устройств управления электродвигателем, например, вычислительным устройством или другим компонентом, связанным с движительной системой 10. Кроме того, хотя следующий процесс 90 описывает ряд операций, которые могут быть выполнены, следует отметить, что процесс 90 может выполняться в отличных порядках и что определенные операции могут не выполняться. Процесс 90 может быть реализован как компьютерные инструкции, хранящиеся в памяти 32 системы 18 управления.
[0055] В проиллюстрированном варианте осуществления процесса 90, система 18 управления может принимать (блок 92) информацию о передвижном транспортном средстве. Информация о передвижном транспортном средстве может быть получена от системы 16 мониторинга положения и/или передвижного транспортного средства 12 и может включать в себя информацию для одного или нескольких передвижных транспортных средств 12, расположенных на беговой поверхности 22. Информация о передвижном транспортном средстве может включать в себя положение (данные 94) передвижного транспортного средства 12 на беговой поверхности 22, скорость (данные 96) передвижного транспортного средства 12 и/или массу (данные 98) передвижного транспортного средства 12.
[0056] Система 18 управления может принимать (блок 100) требуемый профиль движения (например, путь, скорость) для передвижного транспортного средства 12. В некоторых вариантах осуществления, желаемый профиль движения может быть предварительно сконфигурирован (данные 102), который включает в себя путь для передвижного транспортного средства 12 и/или требуемые скорости транспортного средства 12 на каждом участке поверхностной матрицы 24 статоров. В таком варианте осуществления, предварительно сконфигурированный профиль движения может быть получен из памяти 32. Дополнительно или альтернативно, желаемый профиль движения может включать в себя направления, основанные на пользовательском вводе (данные 104). Как обсуждалось ранее, пользовательский ввод может позволять пользователю поворачивать передвижное транспортное средство 12, в то время как предварительно сконфигурированный путь передвижного транспортного средства 12, все еще поддерживается, при этом пользовательский ввод может дать возможность пользователю фактически управлять направлением, в котором движется передвижное транспортное средство 12, причем пользовательский ввод может дать возможность пользователю увеличить ускорение или замедление передвижного транспортного средства 12 или некоторую их комбинацию.
[0057] Система 18 управления может определять (блок 106), какие SSLIM 14 активировать и характеристики SSLIM (например, время активации, величину тяги), основываясь, по меньшей мере, на желаемом профиле движения и/или информации передвижного транспортного средства. Например, в некоторых вариантах осуществления в начале поездки система 18 управления может уже знать положение передвижного транспортного средства 12 и может использовать только профиль движения, чтобы определить, какие SSLIM 14 активировать, время, в которое активировать каждый SSLIM 14, и величину тяги, генерируемой при перемещении передвижного транспортного средства 12 по поверхностной матрице 24 статоров. Однако в некоторых вариантах осуществления, где профиль движения динамически изменяется (например, на основе пользовательского ввода), система 18 управления может использовать положение 94 передвижного транспортного средства 12 для определения какие SSLIM 14 находятся под или вблизи передвижного транспортного средства 12, и выбрать для активации те SSLIM 14, когда передвижное транспортное средство 12 пересекает поверхностную матрицу статоров (например, при деактивации SSLIM 14, которые не выбраны). В некоторых вариантах осуществления, определенный процент SSLIM 14 вокруг передвижного транспортного средства 12 может быть активирован для повышения эффективности.
[0058] Дополнительно, в некоторых вариантах осуществления определение количества SSLIM 14 для активации может зависеть от скорости 96 передвижного транспортного средства 12. Например, при первом запуске передвижного транспортного средства 12 в движение, может быть желательно, активировать все SSLIM 14 под реактивной плитой, чтобы генерировать более высокую мощность и ускорение. Когда передвижной транспортное средство 12 достигает желаемой скорости, система 18 управления может уменьшить плотность SSLIM 14, которые активны в конкретном направлении, потому что меньшее количество SSLIM 14 может поддерживать определенное количество энергии для поддержания желаемой скорости. Когда профиль движения указывает на изменение направления движения передвижного транспортного средства 12, тогда величина вектора тяги и плотность используемых SSLIM 14 могут быть увеличены, поскольку изменение направления может потребовать большего крутящего момента, чем движение по прямой линии. Таким образом, плотность SSLIM 14, которые выбираются для активации под передвижным транспортным средством 12 в любое время, может зависеть от требуемого крутящего момента и текущего вектора движения передвижного транспортного средства 12.
[0059] Должно быть понятно, что ортогонально расположенные обмотки 25 и 26 каждого SSLIM 14 могут давать возможность много направленному движению передвижного транспортного средства 12 для следования по любому профилю движения. Каждая обмотка 25 и 26 может быть под напряжением индивидуально. Генерируемый вектор силы может быть сконфигурирован по желанию, потому что одна обмотка 25 может обеспечивать поле в первом направлении (например, вперед или назад), а вторая обмотка 26 может обеспечивать поле во втором направлении (например, вправо или влево). При использовании в комбинации, обмотки 25 и 26 SSLIM 14 могут быть активированы для обеспечения вектора силы под любым углом.
[0060] Система 18 управления может отправлять (блок 108) управляющие сигналы в матрицу 20 устройств управления электродвигателем для мультиплексирования устройств 48 управления электродвигателем для управления SSLIM 14 по желанию. В некоторых вариантах осуществления, панель 50 переключения может использоваться для подключения устройств 48 управления электродвигателем к соответствующим SSLIM 14. Система 18 управления может вернуться к получению информации о передвижном транспортном средстве в блок 92 и повторить процесс 90 для непрерывного перемещения передвижного транспортного средства 12 вокруг беговой поверхности 22.
[0061] Чтобы помочь визуализировать взаимодействие между реактивной плитой 74 передвижного транспортного средства 12 и поверхностной матрицей 24 статоров под беговой поверхностью 22, фиг.5 иллюстрирует схематичное изображение верхней части реактивной плиты 74, расположенной над поверхностной матрицей статоров. Как обсуждалось ранее, реактивная плита 74 может быть образована из любого подходящего проводящего цветного материала, такого как алюминий, медь, цинк, сплав из латуни и меди или тому подобного. Дополнительно, задняя пластина из железа (например, из стали) может быть расположена между реактивной плитой 74 и нижней частью передвижного транспортного средства 12. Когда магнитное поле проходит через проводник реактивной плиты 74, стальная опорная плита может возвращать поле обратно в SSLIM 14. Вектор силы может быть генерирован противоположным магнитным полем проводника, которое индуцируется вихревыми токами, когда магнитное поле SSLIM 14 проходит через проводник.
[0062] Как изображено, один или несколько роликов 72 (например, 5) могут быть прикреплены к основанию передвижного транспортного средства 12. Ролики 72 могут включать в себя колеса, которые используются для качения передвижного транспортного средства 12 по беговой поверхности 22. Ролики 72 могут быть использованы для поддержания точного воздушного зазора между реактивной плитой 74 и поверхностной матрицей 24 статоров для поддержания эффективного индукционного поля.
[0063] Как обсуждалось ранее, SSLIM 14 матрицы 24 поверхности статора могут быть включены в блоки 29 плитки и размещены в виде сетки. В некоторых вариантах осуществления, опора 110 основания пола может использоваться для поднятия поверхностной матрицы 24 статоров от основания 112 и обеспечения места для пространства 114 для проводки, как иллюстрировано на виде в разрезе на фиг.6. Опора 110 основания пола может поддерживать сетку, в которой размещен каждый из блоков 29 плитки, включая SSLIM 14. Проводка SSLIM 14 может быть расположена в пространстве 114 проводки и может соединять SSLIM 14 с устройствами 48 управления электродвигателем и/или панелью 50 переключения. Блоки 29 плитки (например, эпоксидные блоки), как правило, могут иметь квадратную, прямоугольную, круглую форму или тому подобное, как описано выше, и могут включать в себя две ортогонально расположенные обмотки 25 и 26 из SSLIM 14.
[0064] Фигуры 7-15, в целом, иллюстрируют примеры того, как можно управлять различными SSLIM 14, расположенными под или вблизи реактивной плиты 74, для обеспечения различных векторов тяги и перемещения передвижного транспортного средства 12 в желаемых направлениях. Следует отметить, что количество SSLIM 14, применяемых в одном и том же направлении, увеличивает тягу в этом направлении. Дополнительно, пульсация SSLIM 14 может облегчать определенные движения. Процессор 30 может определить количество SSLIM 14, которые нужно применить, используя физическое моделирование для изменения вектора тяги. Также, если вектор тяги обеспечивается в одном направлении, равная и противоположная тяга может быть обеспечена для изменения вектора. Начиная с фиг.7, схематичное изображение сверху иллюстрирует SSLIM 14, управляемые для создания вектора тяги в прямом направлении в реактивной плите 74 в соответствии с вариантом осуществления. Как указано стрелками 120, один или несколько SSLIM 14 под передней, задней, левой стороной и правой стороной реактивной плиты 74 обеспечивают тягу в прямом направлении. В результате комбинированных тяг, вектор тяги находится в прямом направлении, как указано стрелкой 122.
[0065] Фиг.8 представляет собой схематичное изображение сверху, иллюстрирующее SSLIM 14, управляемые для создания вектора тяги против часовой стрелки (показано стрелкой 124) в реактивной плите 74 в соответствии с вариантом осуществления. Вектор 124 тяги против часовой стрелки может поворачивать передвижное транспортное средство 12. Для создания вектора 124 тяги против часовой стрелки, один или несколько SSLIM 14 под передней и задней частью реактивной плиты 74 могут создавать тягу, ортогональную (90 градусов влево и вправо) (стрелки 126 и 128) для тяг (стрелки 130 и 132), создаваемых одним или несколькими SSLIM 14 под сторонами реактивной плиты 74. Как изображено, тяга 128, создаваемая на левой стороне реактивной плиты 74, направлена в заднем направлении, а тяга 130, создаваемая на правой стороне реактивной плиты 74, направлена в прямом направлении. В результате комбинированных тяг, вектор 124 тяги может поворачивать передвижное транспортное средство 12 в направлении против часовой стрелки.
[0066] Фиг.9 представляет собой схематичное изображение сверху, иллюстрирующее SSLIM 14, управляемые для создания сбалансированной тяги к краям реактивной плиты 74, поэтому вектор тяги (точка 134) не прикладывается к реактивной пластине 74, удерживая, таким образом, передвижное транспортное средство 12 на месте в соответствии с вариантом осуществления. В частности, один или несколько SSLIM 14 под передней и задней частью реактивной плиты 74 могут тянуть в противоположных направлениях к краям реактивной плиты 74, как показано стрелкой 136, представляющей тягу в прямом направлении, и стрелкой 138, представляющей тягу в обратном направлении. В отношении тяг 136 и 138, один или несколько SSLIM 14 под левой и правой сторонами реактивной плиты 74 могут тянуть в противоположных направлениях к краям реактивной плиты 74, как показано стрелкой 140, представляющей тягу в левом направлении, и стрелкой 142, представляющей тягу в правом направлении для удержания реактивной плиты 74 на месте. Тяги 136, 138, 140 и 142 могут создавать сбалансированный рисунок тяг от SSLIM 14, которые не приводят к векторному усилию, прикладываемому к реактивной плите 74.
[0067] Фиг.10 представляет собой схематичное изображение сверху, иллюстрирующее SSLIM 14, управляемые для создания вектора тяги (стрелка 144) в переднем и левом направлении в реактивной плите 74 в соответствии с вариантом осуществления. Вектор 144 тяги может создаваться одним или несколькими SSLIM 14 под передней и задней частью передвижного транспортного средства 12, генерирующими тягу (стрелка 146) в прямом направлении, и одним или несколькими SSLIM 14 под левой и правой сторонами передвижного транспортного средства 12, генерирующими тягу (стрелка 148) в левом направлении. Комбинированные тяги могут генерировать вектор тяги, который обеспечивает направление движения под углом (например, 45 градусов) для передвижного транспортного средства 12.
[0068] Фиг.11 представляет собой схематичное изображение сверху, иллюстрирующее SSLIM 14, управляемые для создания вектора тяги (стрелка 150) в переднем и слегка левом направлении в реактивной плите в соответствии с вариантом осуществления. По сравнению с вектором 144 тяги на фиг.10 вектор 150 тяги на фиг. 11 наклонен влево в меньшей степени в результате активации большего количества SSLIM 14 под передней и задней частью передвижного транспортного средства 12, чтобы генерировать больше тяги (стрелки 152) в прямом направлении, чем SSLIM 14 под левой и правой сторонами, генерирующим тягу (стрелки 154) в левом направлении. Таким образом, результирующий вектор 150 тяги направлен больше вперед, чем влево, в результате того, что тяга, создаваемая SSLIM 14 под передней и задней частью, превышает тягу, генерируемую SSLIM 14 под левой и правой сторонами реактивной плиты 74. Следует понимать, что угол направления вектора тяги может быть точно настроен путем активации соответствующих SSLIM 14.
[0069] Фиг.12 представляет собой схематичное изображение сверху, иллюстрирующее SSLIM 14, управляемые для создания вектора тяги (стрелки 156) в прямом направлении, в то же время поворачивая против часовой стрелки в реактивной плите 74 в соответствии с вариантом осуществления. Для генерирования вперед, вектор 156 тяги, вращающий против часовой стрелки, один или несколько SSLIM 14 под правой и левой сторонами реактивной плиты 74 могут генерировать тягу (стрелки 158) в прямом направлении, а один или несколько SSLIM 14 под передней и задней частью реактивной плиты 74 могут создавать тягу (стрелки 159 и 160) в противоположных направлениях, которые являются ортогональными направлению боковых тяг 158. Например, тяга 159 находится в левом направлении, а тяга 160 находится в правом направлении, что может заставить передвижной транспортное средство 12 поворачиваться против часовой стрелки, в то время как тяги 158 заставляют передвижное транспортное средство 12 двигаться в прямом направлении. Следует понимать, что SSLIM 14 могут управляться для поворота передвижного транспортного средства 12 в направлении по часовой стрелке.
[0070] Фиг.13 представляет собой схематичное изображение сверху, иллюстрирующее SSLIM 14, управляемые для создания мощного вектора тяги (стрелка 161) в прямом направлении в реактивной плите 74 для увеличения ускорения, в соответствии с вариантом осуществления. Как изображено, высокая плотность активированных SSLIM 14 могут генерировать тяги (стрелки 162) в прямом направлении. Более высокая плотность SSLIM 14, активированных в одинаковом направлении, увеличивает тягу в этом векторе.
[0071] Фиг.14 представляет собой схематичное изображение сверху, иллюстрирующее SSLIM 14, управляемые для создания тормозящего вектора тяги (стрелка 164) в прямом направлении в реактивной плите 7, в соответствии с вариантом осуществления. Стрелка 164 вектора тяги уменьшена в размере, чтобы представить эффект от тяги торможения (стрелки 166), генерируемой SSLIM 14 под реактивной плитой 74, на вектор 164 тяги, когда передвижное транспортное средство 12 находится в движении. Следует отметить, что для замедления движения передвижного транспортного средства 12 в определенном направлении, SSLIM 14 под передвижным транспортным средством 12 могут управляться для генерирования тяги (стрелки 166) в направлении, противоположном направлению движения.
[0072] Фиг.15 представляет собой схематичное изображение сверху, иллюстрирующее SSLIM 14, управляемые для создания вектора тяги (стрелка 168) в реактивной плите 74, которая изгибает движение вперед передвижного транспортного средства 12 вправо, без поворота передвижного транспортного средства 12, в соответствии с вариантом осуществления. Первоначально, передвижное транспортное средство 12 движется вперед из-за тяги (стрелки 170), генерируемой SSLIM 14 под передвижным транспортным средством 12. Для изгиба движения передвижного транспортного средства 12, система 18 управления может определить положение передвижного транспортного средства 12 и дать команду матрице 20 устройств управления электродвигателем активировать SSLIM 14 на пути движения передвижного транспортного средства 12 во времени, чтобы взаимодействовать с реактивной плитой 74, когда передвижное транспортное средство 12 пересекает беговую поверхность, чтобы направлять передвижное транспортное средство 12 в желаемом направлении. В некоторых вариантах осуществления, как проиллюстрировано, различные ряды SSLIM 14 могут генерировать тягу в желаемом направлении постепенно. Например, чтобы изогнуть движение передвижного транспортного средства 12 вправо, первый ряд 172 SSLIM 14 может генерировать тягу (стрелки 174) в правом направлении, чтобы воздействовать на транспортное средство 12 вправо на одно приращение. В следующем приращении, второй ряд 176 SSLIM 14 может генерировать тягу (стрелки 178) в прямом направлении, чтобы поддерживать движение вперед передвижного транспортного средства 12. Затем, в следующем приращении, третий ряд 180 SSLIM 14 может генерировать тягу (стрелки 182) в правом направлении, чтобы поддерживать движение вправо передвижного транспортного средства 12. Система 18 управления может управлять дополнительными SSLIM 14 на пути движения передвижного транспортного средства 12, чтобы продолжать создавать искривленное движение, создавая вектор суммарной тяги, направленный под любым желаемым углом.
[0073] Фиг.16 представляет собой вид сбоку механического тормоза 58, включенного в передвижное транспортное средство 12, в соответствии с вариантом осуществления. На первом виде, механический тормоз 58 показан как незадействованный, а на втором виде 192 механический тормоз 58 показан как задействованный. В некоторых вариантах осуществления, механический тормоз 58 может включать в себя пластину 194 из железа (например, стали) с материалом тормозной колодки для высокого трения μ. Материал тормозной колодки может обеспечивать достаточное трение для удержания механического тормоза 58 и передвижного транспортного средства 12 на месте, когда он находится в контакте с беговой поверхностью 22. Дополнительно, механический тормоз 58 может включать в себя выемку 196, в которую вставлен стопорный штифт 198, чтобы удерживать механический тормоз 58 в незадействованном положении, когда механический тормоз 58 проходит через магнитные поля, генерируемые SSLIM 14 на поверхностной матрице 24 статоров. Чтобы задействовать механический тормоз 58, система 18 управления может отправлять управляющий сигнал на передвижное транспортное средство 12 для освобождения стопорного штифта 198. Магнитное поле, генерируемое посредством SSLIM 14, может притягивать железную пластину 194 механического тормоза 58, что может приводить к тому, что железная пластина 194 будет тянуться к и контактировать с беговой поверхностью 22 поверхностной матрицы 24 статоров, как показано на виде 192.
[0074] В некоторых вариантах осуществления, определенные запланированные области поверхностной матрицы 24 статоров могут обеспечивать сбалансированную (например, не прикладывающую векторную силу к реактивной плите 74) структуру магнитных полей, которые активируют развертывание механического тормоза 58. В некоторых вариантах осуществления, механический тормоз 58 может быть задействован, когда магнитное поле, генерируемое SSLIM 14, является достаточно сильным для преодоления силы стопорного штифта 198, удерживающего механический тормоз 58 в незадействованном положении. Следует отметить, что использование механического тормоза 58 может быть запланировано для определенных участков профиля движения передвижного транспортного средства 12, или его использование может быть незапланированным (например, в случае неожиданного события). В некоторых вариантах осуществления, эффективность удерживающей силы, используемой механическим тормозом 58, может быть достаточно малой, так что наличие относительно низкого порога электродвижущей силы может планироваться как ток холостого хода, позволяющий почти минимальному числу SSLIM 14 оставаться активными для минимального профиля движения для мотивации механического тормоза 58.
Чтобы втянуть механический тормоз, пружина 200 возврата, прикрепленная к основанию 202 механического тормоза 58, может втянуть механический тормоз 58 обратно в паз 204, когда магнитное поле (например, электродвижущая сила), притягивающее железную пластину 194, уменьшается (например, недостаточно сильное, чтобы преодолеть тяговое усилие пружины 200 возврата) или выключено. При втянутом состоянии, механический тормоз 58 может быть зафиксирован в незадействованном положении посредством стопорного штифта 198, повторно вставленного в выемку 196.
[0076] Могут иметься более одного механического тормоза 58, используемого передвижным транспортным средством 12, и они могут быть расположены относительно роликов 72. Например, фиг. 17 представляет собой схематичное изображение сверху ряда местоположений механических тормозов 58 и роликов 72 в реактивной плите 74 передвижного транспортного средства 12 в соответствии с вариантом осуществления. Следует понимать, что размер и/или количество механических тормозов 58 могут быть определены на основе планируемой массы для передвижного транспортного средства 12 (например, планируемой массы компонентов транспортного средства и занимающих пассажиров) и скорости передвижного транспортного средства 12. В некоторых вариантах осуществления, количество и/или размер механических тормозов 58 могут быть определены на основе самой высокой запланированной скорости для профиля движения передвижного транспортного средства и наибольшей планируемой массы для передвижного транспортного средства 12. Это может позволить обеспечить достаточную удерживающую силу, когда механические тормоза 58 задействованы для выполнения сценариев с верхней границей. Дополнительно, в некоторых вариантах осуществления, когда передвижное транспортное средство 12 движется с меньшей, чем наивысшая запланированная скорость, не все механические тормоза 58 могут быть задействованы. То есть, количество задействованных механических тормозов 58 может зависеть от того, какая удерживающая сила необходима для остановки передвижного транспортного средства 12 на основе скорости и массы передвижного транспортного средства 12. В изображенном варианте осуществления, пять механических тормозов 58 включены в реактивную плиту 74 передвижного транспортного средства 12. Один механический тормоз 58 расположен в каждом из четырех углов реактивной плиты 74, и один механический тормоз 58 расположен в центре реактивной плиты 74. Следует понимать, что может использоваться любое подходящее количество механических тормозов 58.
[0077] Количество роликов 72 и расположение роликов 72 в каждой точке реактивной плиты 74 могут изменяться по желанию, чтобы поддерживать достаточный воздушный зазор между реактивной плитой 74 и SSLIM 14. Например, если реактивная плита 74 не содержит роликов 72 на определенных участках реактивной плиты 74, эти участки могут колебаться (например, перемещаться вверх и вниз), в то время когда передвижное транспортное средство 12 пересекает поверхностную матрицу 24 статоров. Перемещение вверх и вниз участков реактивной плиты 74 может варьировать расстояние воздушного зазора и снижать эффективность SSLIM 14. Также, размер роликов 72 может быть уменьшен, чтобы обеспечить относительно небольшой воздушный зазор между реактивной плитой 74 и SSLIM 14. Как изображено, реактивная плита 74 включает в себя шесть роликов 72: два на левой и правой сторонах реактивной плиты 74, один на передней части реактивной плиты 74 и один на задней части реактивной плиты 74. Такое расположение может препятствовать перемещению реактивной плиты 74 вверх и вниз, когда передвижное транспортное средство 12 пересекает поверхностную матрицу 24 статоров для поддержания точного воздушного зазора. Следует понимать, что любое подходящее количество, размер и/или расположение роликов 72 может использоваться для поддержания точного воздушного зазора.
[0078] Фигуры 18-21 представляют собой блок-схемы различных процессов для торможения или удержания передвижного транспортного средства 12 и/или освобождения передвижного транспортного средства 12. Хотя последующее описание процессов на фигурах 18-21 описывается как выполняемое системой 18 управления, следует отметить, что некоторая часть или весь процесс 90 может выполняться другими устройствами управления, которые могут поддерживать связь с системой 18 управления, системой 16 мониторинга положения и/или матрицей 20 устройств управления электродвигателем, например, вычислительным устройством или другим компонентом, связанным с движительной системой 10. Кроме того, хотя следующий процесс описывает ряд операций, которые могут быть выполнены, следует отметить, что процесс может выполняться в отличных порядках и что определенные операции могут не выполняться. Процесс может быть реализован как компьютерные инструкции, хранящиеся в памяти 32 системы 18 управления.
[0079] С учетом вышеизложенного, Фиг.18 представляет собой блок-схему процесса 210 для развертывания механического тормоза 58 по фиг.16 в соответствии с вариантом осуществления. Система 18 управления может принимать (212) запрос на торможение. Запрос на торможение может быть принят от передвижного транспортного средства 12 (например, на основе пользовательского ввода), может быть получен как часть профиля движения, полученного из памяти 32, или тому подобного.
[0080] Система 18 управления может определять (блок 214) положение передвижного транспортного средства 12, используя информацию о транспортном средстве из системы 16 мониторинга положения или из системы 70 отслеживания положения. Таким образом, система 18 управления может определять положение передвижного транспортного средства 12 относительно поверхностной матрицы 24 статоров на основе полученной информации о транспортном средстве.
[0081] Система 18 управления может посылать (блок 216) управляющий сигнал для передвижного транспортного средства 12 для приведения в действие (например, втягивание) стопорного штифта 198 одного или более механических тормозов 58. Система 18 управления также может отправлять (218) управляющий сигнал на соответствующие устройства 48 управления электродвигателем и/или панель 50 переключения для управления SSLIM 14 вблизи передвижного транспортного средства 12, чтобы обеспечить магнитное поле с достаточной силой, чтобы тянуть железный материал одного или нескольких механических тормозов 58 для контакта с поверхностью беговой поверхности 22. Удерживающая сила одного или нескольких задействованных механических тормозов 58 может привести к тому, что передвижное транспортное средство 12 прекратит движение.
[0082] Фиг.19 представляет собой блок-схему процесса 220 для втягивания механического тормоза 58 по фиг.16 в соответствии с вариантом осуществления. Система 18 управления может принимать (блок 222) запрос на перемещение передвижного транспортного средства 12, когда один или несколько механических тормозов 58 задействованы. Запрос на торможение может быть принят от передвижного транспортного средства 12 (например, на основе пользовательского ввода), может быть получен как часть профиля движения, полученного из памяти 32, или тому подобного.
[0083] Система 18 управления может определять (блок 224) положение передвижного транспортного средства 12, используя информацию о транспортном средстве из системы 16 мониторинга положения или из системы 70 отслеживания положения. Таким образом, система 18 управления может определять положение передвижного транспортного средства 12 относительно поверхностной матрицы 24 статоров на основе полученной информации о транспортном средстве.
[0084] Система 18 управления может отправлять (блок 226) управляющий сигнал в соответствующие устройства 48 управления электродвигателем и/или панель 50 переключения для управления SSLIM 14, обеспечивающими магнитное поле, притягивающее механический тормоз 58, так что тормоз 58 втягивается. Таким образом, магнитное поле, генерируемое посредством SSLIM 14, может быть уменьшено до недостаточной силы, чтобы преодолеть усилие пружины 200 возврата, что позволяет пружине 200 возврата отвести механический тормоз 58 от SSLIM 14 в паз 204 для хранения. Как только механический тормоз 58 втянут в паз 204, система 18 управления может отправлять управляющий сигнал на передвижное транспортное средство 12 для приведения в действие (например, задействования) стопорного штифта 198 в выемку 196 для фиксации механического тормоза 58 в нерабочем положении.
[0085] Фиг.20 представляет собой блок-схему процесса 230 для приложения магнитной силы, используемой SSLIM 14, для удержания передвижного транспортного средства 12 на месте, в соответствии с вариантом осуществления. Система 18 управления может принимать (блок 232) запрос на замедление или остановку передвижного транспортного средства 12. Запрос может быть принят от передвижного транспортного средства 12 (например, на основе пользовательского ввода), может быть получен как часть профиля движения, полученного из памяти 32, или тому подобного.
[0086] Система 18 управления может определять (блок 234) положение передвижного транспортного средства 12, используя информацию о транспортном средстве из системы 16 мониторинга положения или из системы 70 отслеживания положения. Таким образом, система 18 управления может определять положение передвижного транспортного средства 12 относительно поверхностной матрицы 24 статоров на основе полученной информации о транспортном средстве.
[0087] Система 18 управления может отправлять (блок 236) управляющие сигналы в соответствующие устройства 48 управления электродвигателем и/или панель 50 переключения для управления SSLIM 14 возле передвижного транспортного средства 12 (например, под и/или вокруг местоположения передвижного транспортного средства 12) для удержания передвижного транспортного средства 12 на месте. В некоторых вариантах осуществления, один SSLIM 14 под передней, задней, левой и правой сторонами реактивной плиты 74 может генерировать почти равную и сбалансированную тягу по направлению к центру реактивной плиты 74. В результате, вектор тяги не может быть сгенерирован, и передвижное транспортное средство 12 может удерживаться в неподвижном положении. Как обсуждалось выше, подобный сценарий может происходить, когда SSLIM 14 на эквивалентных положениях на противоположных сторонах реактивной плиты 74 толкают к внешним краям реактивной плиты 74.
[0088] Фиг.21 представляет собой блок-схему процесса 240 для освобождения удерживающей магнитной силы, используемой SSLIM 14, для того, чтобы дать возможность передвижному транспортному средству 12 двигаться, в соответствии с вариантом осуществления. Система 18 управления может принимать (блок 242) запрос на движение передвижного транспортного средства 12, в то время как магнитное поле SSLIM 14 удерживает передвижное транспортное средство 12 на месте. Запрос может быть принят от передвижного транспортного средства 12 (например, на основе пользовательского ввода), может быть получен как часть профиля движения, полученного из памяти 32, или тому подобного.
[0089] Система 18 управления может определять (блок 244) положение передвижного транспортного средства 12, используя информацию о транспортном средстве из системы 16 мониторинга положения или из системы 70 отслеживания положения. Таким образом, система 18 управления может определять положение передвижного транспортного средства 12 относительно поверхностной матрицы 24 статоров на основе полученной информации о транспортном средстве.
[0090] Система 18 управления может отправлять (блок 246) управляющие сигналы в соответствующие устройства 48 управления электродвигателем и/или панель 50 переключения для управления SSLIM 14, удерживающими передвижное транспортное средство 12 на месте, для изменения или снятия магнитного поля, чтобы позволить передвижному транспортному средству 12 двигаться. Например, система 18 управления может изменять вектор тяги, сгенерированный посредством SSLIM 14, приказывая, чтобы один или несколько SSLIM под реактивной плитой 74 генерировали тягу в реактивной плите 74 в прямом направлении. В результате изменения вектора тяги, передвижное транспортное средство 12 может быть освобождено из неподвижного положения и мотивировано в направлении вектора тяги.
[0091] Как обсуждалось ранее, магнитное поле, генерируемое SSLIM 14, может быть использовано для питания бортовой электроники передвижного транспортного средства 12. С этой целью, фиг. 22 представляет собой принципиальную схему, иллюстрирующую использование индукционной катушки 79 на реактивной плите 74 для получения энергии от SSLIM 14 для питания бортовой электроники (например, процессора 52, памяти 54, модуля связи 56, источника питания 60, беспроводного направленного контроллера 62, динамиков 64, фар 66, удерживающих замков 68, системы 70 отслеживания положения) передвижного транспортного средства 12, в соответствии с вариантом осуществления. Как изображено, один или несколько выпрямителей и/или стабилизаторов 76 напряжения могут использоваться для преобразования, поддержания, усиления или некоторой их комбинации, индуцированной энергии от магнитного поля, генерируемой SSLIM 14. Например, выпрямитель может 78 может преобразовывать мощность переменного тока в мощность постоянного тока, которая используется для питания бортовой электроники. В некоторых вариантах осуществления, величина воздушного зазора 252 между реактивной плитой 74 и SSLIM 14 может влиять на напряженность индукционного поля, генерируемого SSLIM 14, и на количество энергии, поглощаемой индукционной катушкой 79. Таким образом, может быть желательно поддерживать относительно небольшой воздушный зазор 252 для усиления индукционного поля.
[0092] В то время как только некоторые признаки настоящего раскрытия были проиллюстрированы и раскрыты в данном документе, многие модификации и изменения будут встречаться у специалистов в данной области техники. Поэтому, должно быть понято, что прилагаемая формула изобретения предназначена для покрытия всех таких модификаций и изменений, которые подпадают под действительную сущность раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВАЯ УСТАНОВКА С ЗАБОРТНЫМ ВОДОМЕТОМ ДЛЯ МОРСКИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2019 |
|
RU2782398C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ В ГИБРИДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2013 |
|
RU2605139C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА В СВЯЗИ С ЗАПУСКОМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ЭТОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2600417C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ТОРМОЖЕНИЯ ИЛИ ЗАПУСКА ТЕЛЕЖКИ АТТРАКЦИОНА ДЛЯ КАТАНИЯ | 2015 |
|
RU2696896C2 |
| ТРАНСПОРТИРОВОЧНАЯ СИСТЕМА И ПЕРЕМЕЩАЮЩЕЕ УСТРОЙСТВО ДЛЯ НЕЁ | 2014 |
|
RU2693388C2 |
| СИСТЕМА И СПОСОБ НАКОПЛЕНИЯ ЭНЕРГИИ ДЛЯ ГИБРИДНОЙ ДВИЖИТЕЛЬНОЙ СИСТЕМЫ | 2005 |
|
RU2397076C2 |
| СПОСОБ ТРОГАНИЯ С МЕСТА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2604935C2 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2598441C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2587664C2 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2608987C2 |
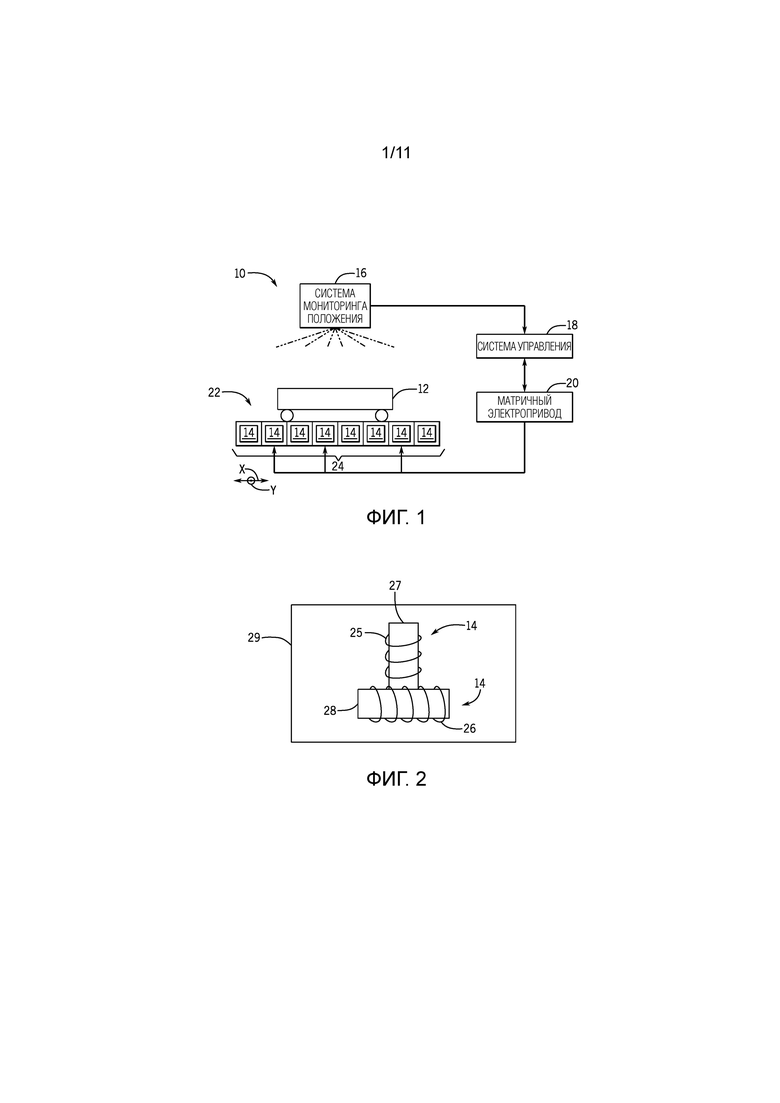
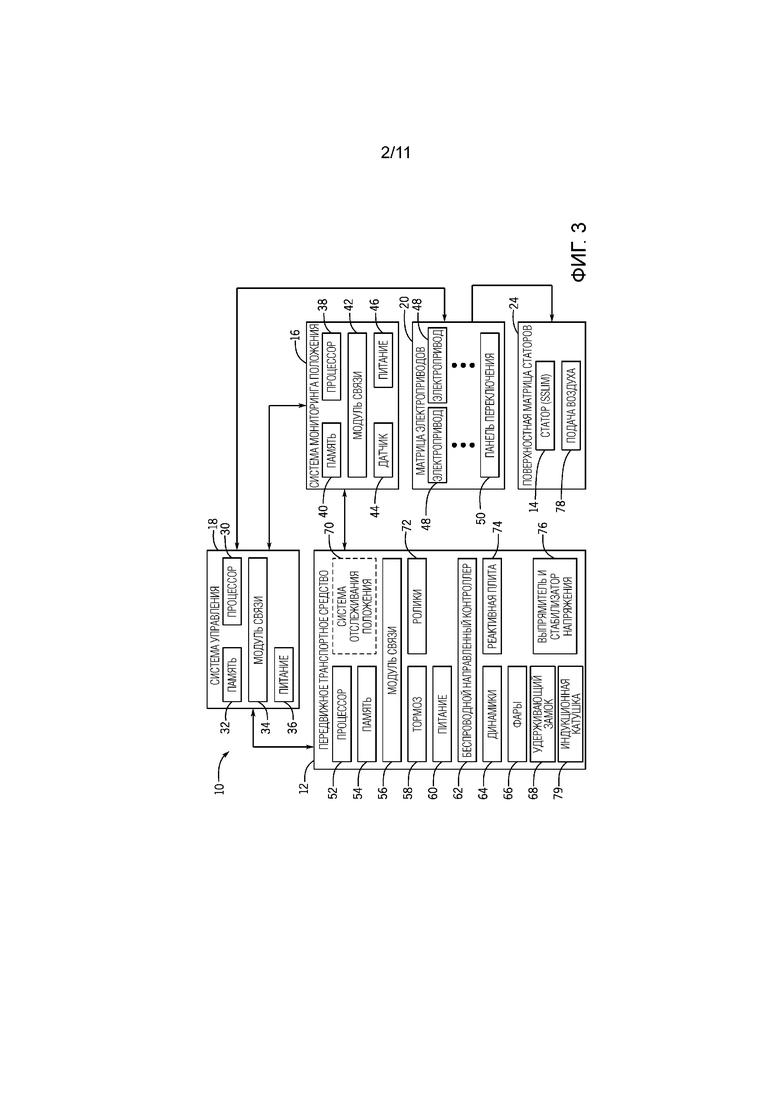
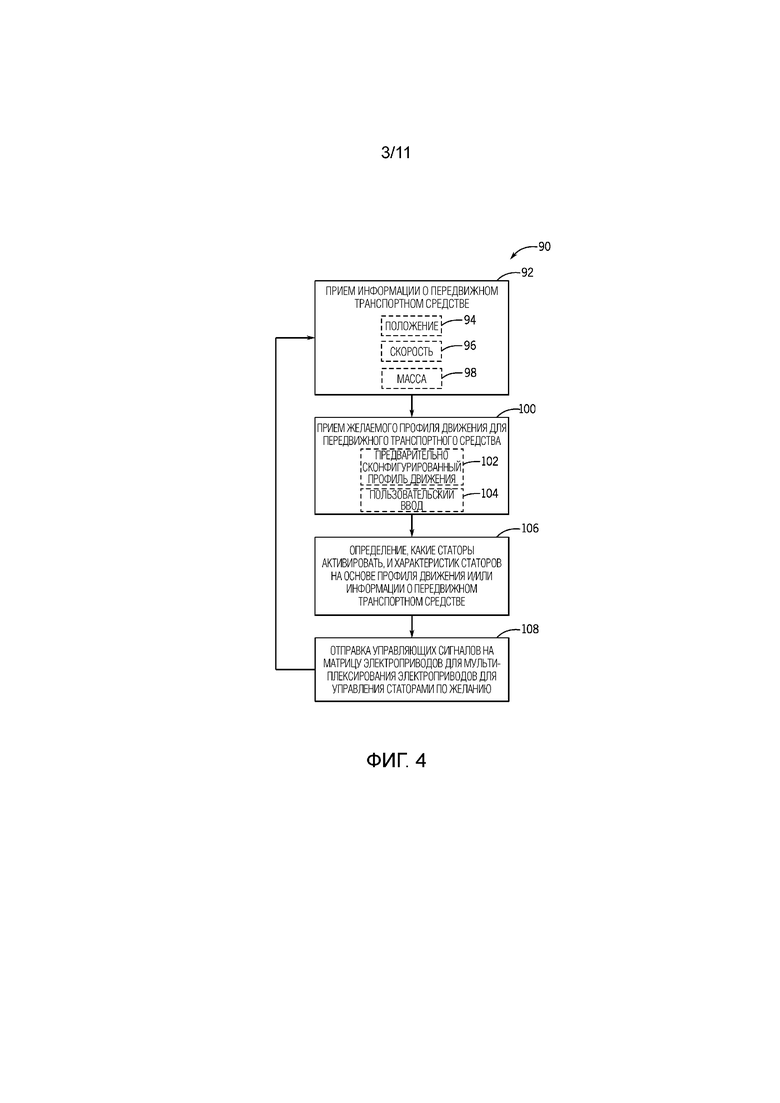
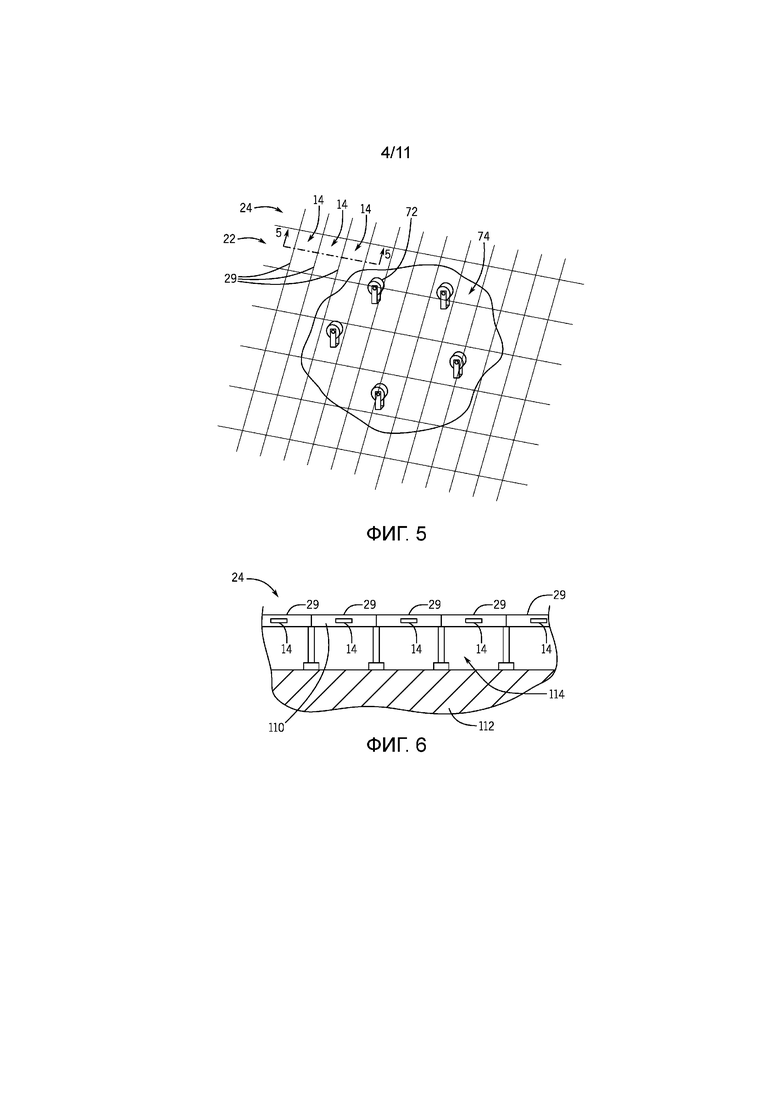
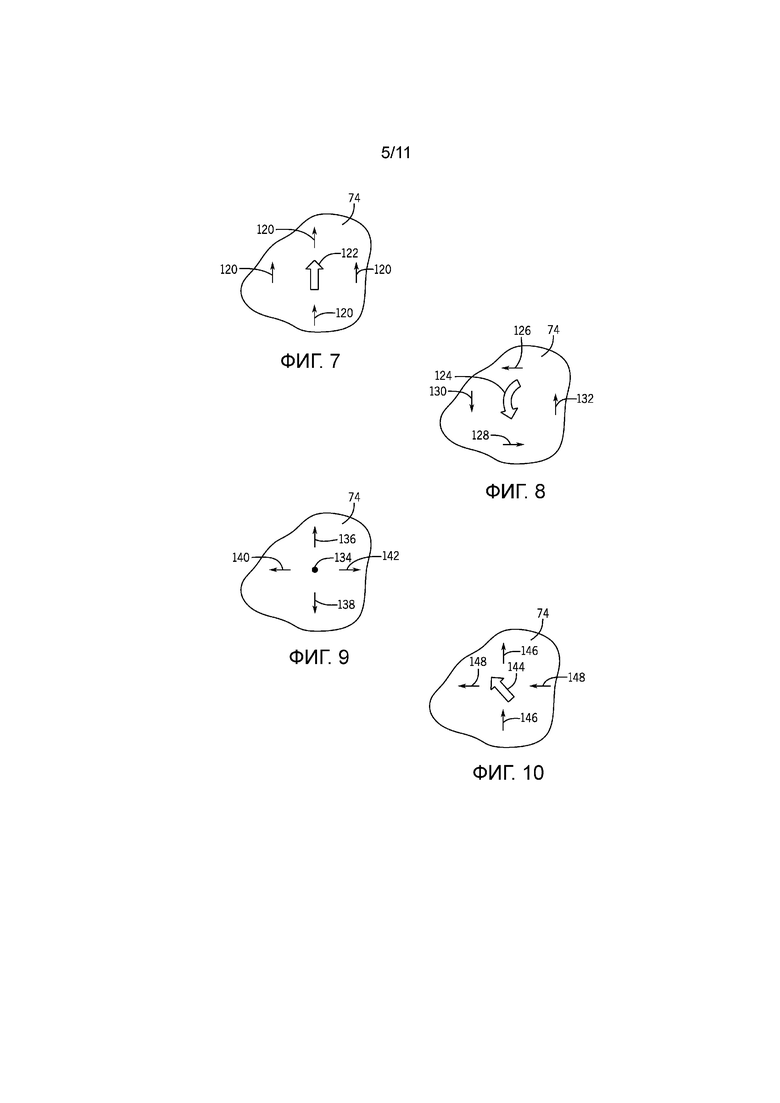

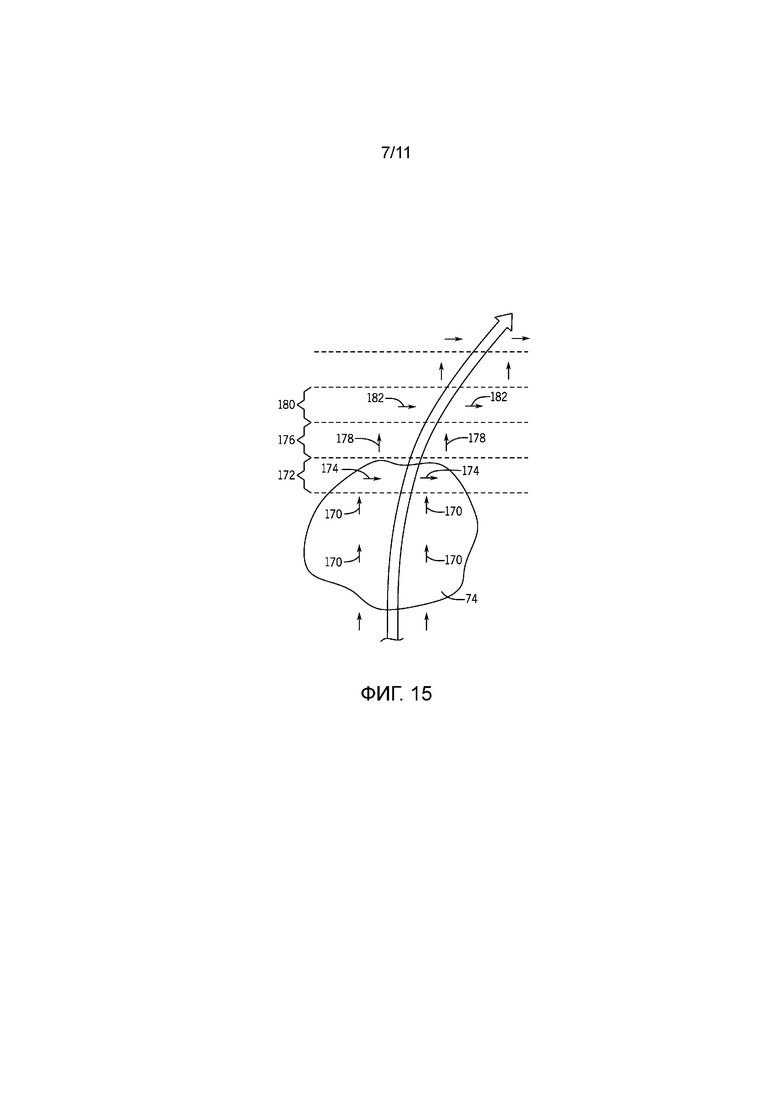
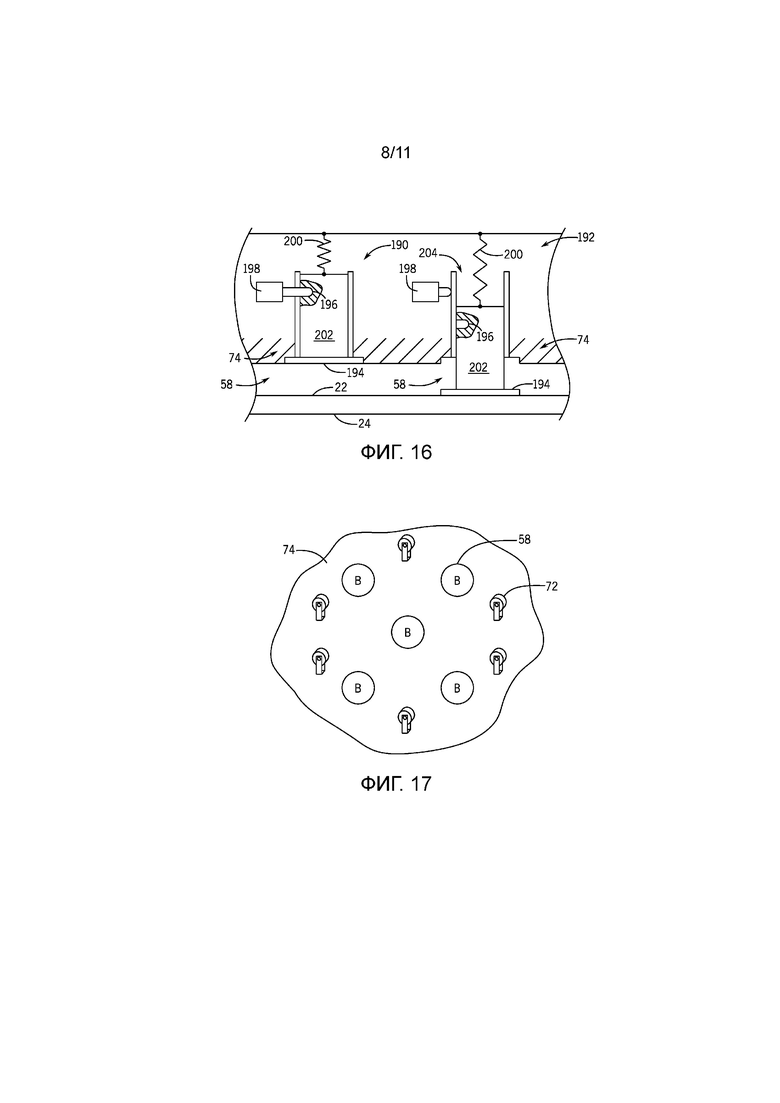
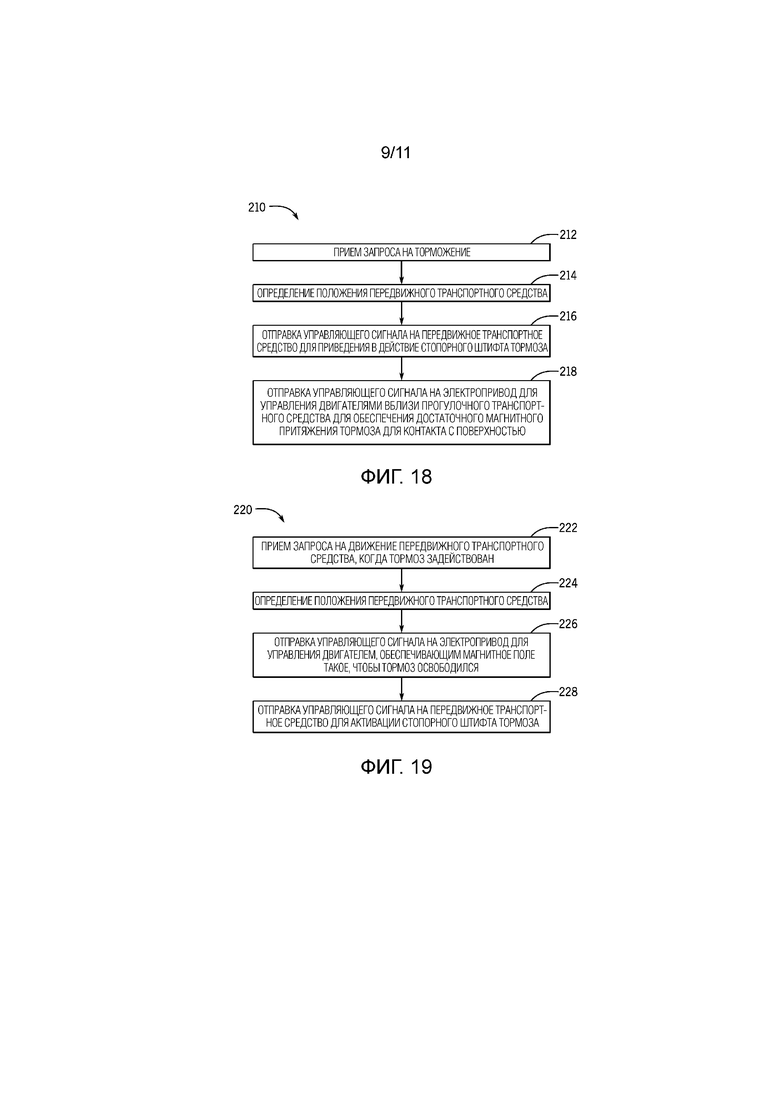
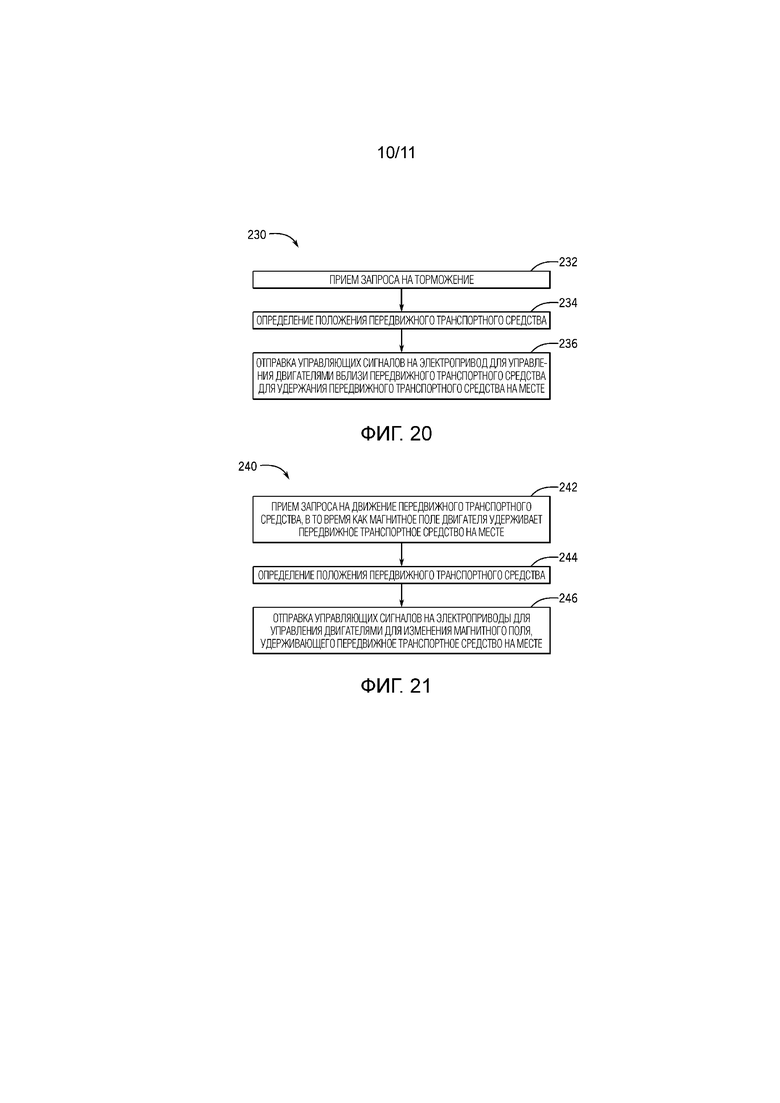

Группа изобретений относится к системам электротяги, создаваемой линейными двигателями. Движительная система содержит одно или несколько передвижных транспортных средств, содержащих реактивную плиту, поверхностную матрицу статоров, содержащую множество односторонних линейных асинхронных двигателей (SSLIM), и множество устройств управления электродвигателем, выполненных с возможностью электрического соединения с множеством SSLIM через панель переключения, и систему управления. Система управления выполнена с возможностью приема информации, относящейся к передвижным транспортным средствам, приема желаемого профиля движения для передвижных транспортных средств по поверхностной матрице статоров, определения, какие из множества SSLIM активировать, и отправки управляющих сигналов на множество устройств управления электродвигателем для управления множеством SSLIM для создания желаемого профиля движения. Также заявлены способ управления движением одного или нескольких передвижных транспортных средств и вариант движительной системы. Технический результат заключается в обеспечении различных профилей движения для передвижных транспортных средств. 3 н. и 16 з.п. ф-лы, 22 ил.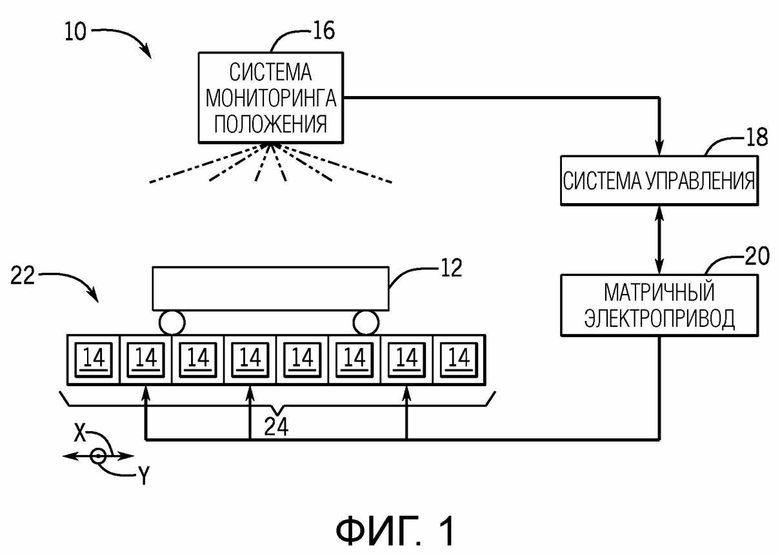
1. Движительная система, содержащая:
- одно или несколько передвижных транспортных средств, содержащих реактивную плиту, установленную на нижней части каждого из одного или нескольких передвижных транспортных средств;
- поверхностную матрицу статоров, установленную с беговой поверхностью для одного или нескольких передвижных транспортных средств и содержащую множество односторонних линейных асинхронных двигателей (SSLIM), причем каждый из по меньшей мере части множества SSLIM включает в себя две обмотки, установленные ортогонально друг другу;
- множество устройств управления электродвигателем, выполненных с возможностью электрического соединения с множеством SSLIM через панель переключения; и
- систему управления, выполненную с возможностью:
- приема информации, относящейся к одному или нескольким передвижным транспортным средствам;
- приема желаемого профиля движения для одного или нескольких передвижных транспортных средств по поверхностной матрице статоров;
- определения, какие из множества SSLIM активировать, и характеристик множества SSLIM на основе желаемого профиля движения, информации или некоторой их комбинации; и
- отправки управляющих сигналов на множество устройств управления электродвигателем для управления множеством SSLIM для создания желаемого профиля движения, причем множество устройств управления электродвигателем выполнено с возможностью управления множеством SSLIM для создания желаемого профиля движения посредством своевременной активации поднабора из множества SSLIM под реактивной плитой для генерации вектора тяги в реактивной плите, который заставляет одно или несколько передвижных транспортных средств следовать по пути, заданному желаемым профилем движения, когда одно или несколько передвижных транспортных средств пересекают беговую поверхность.
2. Движительная система по п.1, в которой:
множество устройств управления электродвигателем имеются в меньшем количестве, чем множество SSLIM; и
система управления мультиплексирует множество устройств управления электродвигателем посредством панели переключения для управления поднабором из множества SSLIM для обеспечения желаемого профиля движения одного или нескольких передвижных транспортных средств.
3. Движительная система по п.1, в которой одно или несколько передвижных транспортных средств содержат механический тормоз, содержащий железную пластину и тормозной материал, причем магнитное поле, создаваемое одним или несколькими из множества SSLIM, притягивает железную пластину к беговой поверхности, а тормозной материал обеспечивает трение для остановки одного или нескольких передвижных транспортных средств.
4. Движительная система по п.1, в которой первая из двух обмоток расположена в продольном направлении, а вторая из двух обмоток расположена в поперечном направлении в части множества SSLIM.
5. Движительная система по п.4, в которой две обмотки заключены в соответствующую планку блока эпоксидной плитки, которая формирует часть множества SSLIM, и лист винила расположен на верхней части блока эпоксидной плитки, который служит в качестве беговой поверхности для роликов одного или нескольких передвижных транспортных средств.
6. Движительная система по п.1, содержащая систему мониторинга положения, выполненную с возможностью определения информации, включающей в себя по меньшей мере положение одного или нескольких передвижных транспортных средств, скорость одного или нескольких передвижных транспортных средств или и то и другое.
7. Движительная система по п.6, в которой система мониторинга положения содержит:
оптическую систему, которая использует камеру для отслеживания информации, причем оптическая система отделена от одного или нескольких передвижных транспортных средств;
процессор, который использует триангуляцию сигнала для триангуляции сигнала от одного или нескольких передвижных транспортных средств через сеть, к которой система мониторинга положения и одно или несколько передвижных транспортных средств подсоединены для определения информации; или
и оптическую систему, и процессор.
8. Движительная система по п.1, в которой каждая из двух обмоток индивидуально возбуждается для создания магнитного поля в одном из двух направлений на основе полярности.
9. Движительная система по п.1, в которой одно или несколько передвижных транспортных средств содержат бортовую электронику, которая по меньшей мере частично получает питание от мощности, индуцированной магнитными полями, генерируемыми множеством SSLIM.
10. Движительная система по п.1, в которой количество SSLIM из множества SSLIM для активации и величина тока для подачи к активированным SSLIM из множества SSLIM определяются на основе скорости и пути, включенных в желаемый профиль движения.
11. Движительная система по п.1, в которой желаемый профиль движения получен в виде пользовательского ввода от одного или нескольких передвижных транспортных средств, в качестве предварительно сконфигурированного профиля движения из памяти системы управления, или некоторой их комбинации.
12. Способ управления движением одного или нескольких передвижных транспортных средств, включающий этапы, на которых:
- принимают посредством системы управления информацию, относящуюся к одному или нескольким передвижным транспортным средствам, расположенным на беговой поверхности поверхностной матрицы статоров, причем поверхностная матрица статоров содержит множество односторонних линейных асинхронных двигателей (SSLIM), причем каждый SSLIM из множества SSLIM включает в себя две обмотки, расположенные ортогонально друг другу, и одно или несколько передвижных транспортных средств содержат реактивную плиту на основе цветных металлов, прикрепленную к нижней части каждого соответствующего передвижного транспортного средства из одного или нескольких передвижных транспортных средств;
- принимают, посредством системы управления, желаемый профиль движения для одного или нескольких передвижных транспортных средств по поверхностной матрице статоров;
- определяют, посредством системы управления, выборку из множества SSLIM для активации, и характеристики выборки из множества SSLIM на основе желаемого профиля движения, информации, или некоторой их комбинации; и
- отправляют, посредством системы управления, управляющие сигналы на множество устройств управления электродвигателем для управления выборкой из множества SSLIM для создания желаемого профиля движения, причем множество устройств управления электродвигателем управляет множеством SSLIM для создания желаемого профиля движения посредством своевременной активации поднабора из множества SSLIM под реактивной плитой для генерации вектора тяги в реактивной плите, который заставляет одно или несколько передвижных транспортных средств следовать по пути, заданному желаемым профилем движения, когда одно или несколько передвижных транспортных средств пересекают беговую поверхность.
13. Способ по п.12, включающий в себя мультиплексирование множества устройств управления электродвигателем для управления только подмножеством из множества SSLIM, необходимым для желаемого профиля движения одного или нескольких передвижных транспортных средств, причем множество устройств управления электродвигателем имеются в меньшем количестве, чем множество SSLIM.
14. Способ по п.12, включающий в себя отправку посредством системы управления управляющих сигналов одному или нескольким из множества устройств управления электродвигателем для управления одним или несколькими из множества SSLIM вблизи с одним или несколькими передвижными транспортными средствами для создания магнитного поля, которое притягивает железную пластину механического тормоза, включенного в каждое из одного или нескольких передвижных транспортных средств, для контакта с поверхностью поверхностной матрицы статоров.
15. Способ по п.12, в котором информация, относящаяся к одному или нескольким передвижным транспортным средствам, включает в себя положение, скорость или и то и другое для одного или нескольких передвижных транспортных средств, и информацию, принимаемую из системы мониторинга положения.
16. Способ по п.12, в котором характеристики выборки из множества SSLIM включают в себя моменты времени активации для каждого из множества SSLIM, используемых для создания желаемого профиля движения, величину магнитного поля для генерации или некоторую их комбинацию.
17. Движительная система, содержащая:
систему управления, которая:
- принимает информацию, относящуюся к одному или нескольким передвижным транспортным средствам, расположенным на беговой поверхности поверхностной матрицы статоров, причем поверхностная матрица статоров содержит множество односторонних линейных асинхронных двигателей (SSLIM), причем каждый SSLIM из множества SSLIM включает в себя две обмотки, расположенные ортогонально друг другу, и одно или несколько передвижных транспортных средств содержат реактивную плиту на основе цветных металлов, прикрепленную к нижней части каждого соответствующего передвижного транспортного средства из одного или нескольких передвижных транспортных средств;
- принимает желаемый профиль движения для одного или нескольких передвижных транспортных средств по поверхностной матрице статоров;
- определяет, какие из множества SSLIM активировать, и характеристики множества SSLIM на основе желаемого профиля движения, информации или некоторой их комбинации; и
- отправляет управляющие сигналы на множество устройств управления электродвигателем для управления множеством SSLIM для создания желаемого профиля движения, так что множество устройств управления электродвигателем управляет множеством SSLIM для создания желаемого профиля движения посредством своевременной активации поднабора из множества SSLIM под реактивной плитой для генерации вектора тяги в реактивной плите, который заставляет одно или несколько передвижных транспортных средств следовать по пути, заданному желаемым профилем движения, когда одно или несколько передвижных транспортных средств пересекают беговую поверхность.
18. Движительная система по п.17, при этом система управления мультиплексирует множество устройств управления электродвигателем для управления только поднабором из множества SSLIM, необходимым для желаемого профиля движения одного или нескольких передвижных транспортных средств, причем множество устройств управления электродвигателем имеются в меньшем количестве, чем множество SSLIM.
19. Движительная система по п.17, при этом система управления обнаруживает ненормальную работу определенных обмоток из множества SSLIM с использованием замкнутого контура обратной связи и обратного вычисления результирующего движения одного или нескольких передвижных транспортных средств.
| WO 2016022269 A1, 11.02.2016 | |||
| US 9061214 B2, 23.06.2015 | |||
| US 6445093 B1, 03.09.2002 | |||
| Кран машиниста воздушного тормоза для железнодорожных повозок | 1931 |
|
SU34464A1 |

