Изобретение относится к области судовых интегрированных навигационных систем (ИНС), а именно к области средств разработки и отладки ИНС водного транспорта.
Одним из главных условий обеспечения конкурентоспособности судовых ИНС является повышение эффективности процесса их разработки и надежности создаваемых систем, что обуславливает создание комплексов, объединяющих в своем составе не только средств разработки и отладки ИНС, но и актуализируемую базу технологий, представляющую собой единую технологическую платформу (ЕТП). Под ЕТП в данном изобретении понимается программный комплекс, компоненты которого обеспечивают создание (модернизацию) специального программного обеспечения судовых ИНС в различных конфигурациях, работающего под управлением различных операционных систем, с широким спектром сопрягаемого навигационного оборудования.
Известен комплекс отладки по патенту RU 2448363 (МПК G06F 15/00, опубл. 05.08.2010), который содержит управляющую вычислительную машину, пульт управления, ЭВМ общего назначения и группу имитаторов входной информации, подключенных входами к ЭВМ общего назначения, а выходами - к управляющей вычислительной машине, синхронизирующий выход которой подключен к синхронизирующему входу пульта управления, который через первую магистральную шину подключен к управляющей вычислительной машине, а через вторую - к ЭВМ общего назначения, сигнальный вход которой объединен с управляющим входом управляющей вычислительной машины и подключен к выходу пульта управления.
Из патента на полезную модель RU 15933 (МПК G01D 21/00, опубл. 20.11.2000) известен стенд для разработки и проверки навигационных комплексов, который содержит панель имитации и индикации разовых команд (ПИИРК), прибор навигационно-плановый, а также сам навигационный комплекс в составе инерциальной навигационной системы, радиотехнической системы ближней навигации (РСБН), спутниковой навигационной системы (СНС), пульта управления и ввода и бортовой цифровой вычислительной машины (БЦВМ), причем в его состав дополнительно введены последовательно соединенные технологическая вычислительная машина, адаптер интерфейса последовательных сигналов и устройство коммутации последовательных сигналов и разовых команд, выходы которого соединены с БЦВМ, а на входы поданы также выходы инерциальной навигационной системы, РСБН, СНС и ПИИРК.
Известен стенд комплексирования информационно-управляющих систем многофункциональных летательных аппаратов по патенту RU 2632546 (МПК G05B 17/00, G01D 21/00, опубл. 05.10.2017), который содержит управляющую аппаратуру, состоящую по меньшей мере из одной инструментальной машины частных моделей и одной инструментальной машины регистрации параметрической информации, а также по меньшей мере одно автоматизированное рабочее место (АРМ) инженера-экспериментатора, автоматизированное рабочее место - репозиторий модельных данных, аппаратуру имитации телевизионных сигналов и аппаратуру имитации разовых команд и аналоговых сигналов, взаимосоединенных высокоскоростным детерминированным каналом реального времени, основанным на технологии Ethernet с обеспечением многомашинного распределенного тестирования информационно-управляющей системы, а также средства тестирования и моделирования, обеспечивающие выполнение тестов, проверку взаимодействия проверяемой информационно-управляющей системы с обеспечением взаимодействия от программных моделей внешних систем, взаимодействующих с информационно-управляющей системой в программном/реальном масштабе времени.
Техническое решение, известное из патента RU 2632546, выбрано в качестве ближайшего аналога данного изобретения.
В качестве недостатков ближайшего аналога, а также недостатков других приведенных аналогов можно отметить отсутствие возможностей: комплексирования функций настройки и отладки разрабатываемой судовой ИНС; программной имитации ИНС как в целом, так и ее составных частей; оптимизации архитектуры ИНС в зависимости от требований заказчика, типа судна и состава его навигационного оборудования. Кроме того, в указанных аналогах не предусмотрено использование ЕТП для разработки судовых ИНС и ее актуализация.
Задача, на решение которой направлена данное изобретение, заключается в создании экспериментально-отладочного комплекса (ЭОК), обеспечивающего разработку и отладку судовых ИНС на базе ЕТП и повышение эффективности этого процесса, путем устранения указанных недостатков.
Технический результат, достигаемый при осуществлении заявляемого изобретения, заключается в расширение функциональных возможностей, обеспечивающих комплексирование функций настройки и отладки разрабатываемой ИНС, поддержание актуального репозитория программных компонент ЕТП, программную имитацию разрабатываемой ИНС как в целом, так и ее составных частей, и оптимизацию ее архитектуры в зависимости от требований заказчика, типа судна и состава его навигационного оборудования.
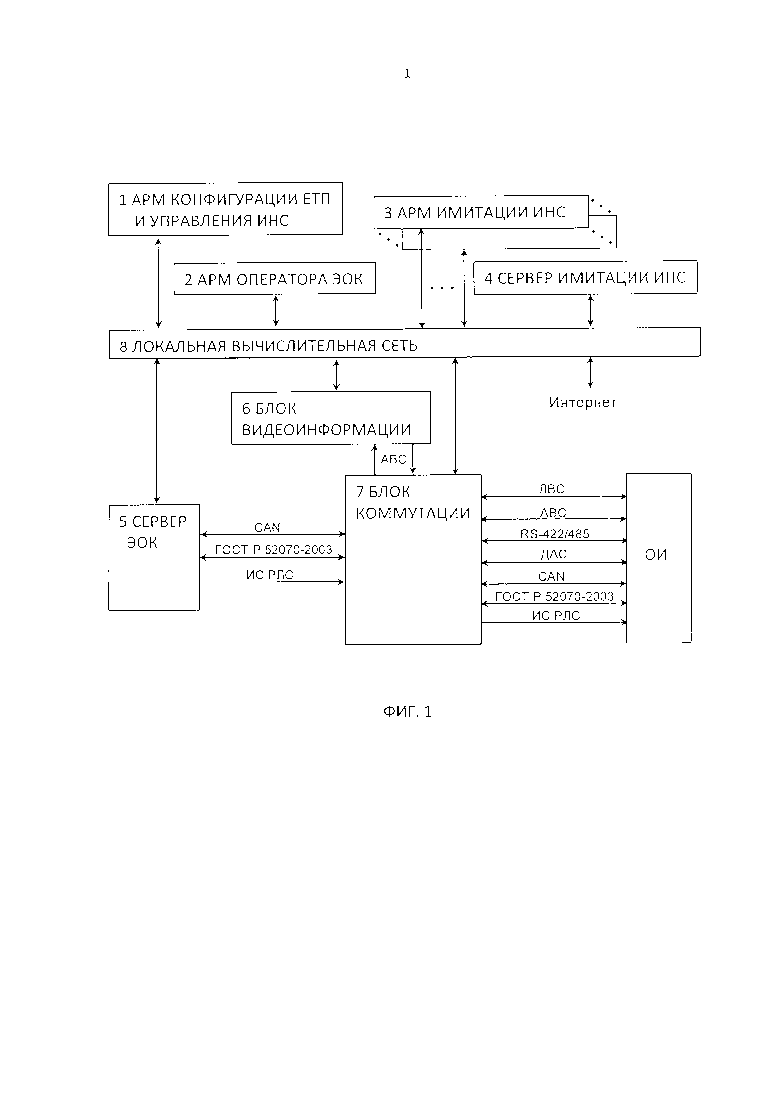
Указанный технический результат достигается тем, что в экспериментально-отладочный комплекс, содержащий АРМ оператора ЭОК и блок коммутации, дополнительно в состав комплекса включены АРМ конфигурации ЕТП и управления ИНС, АРМ имитации ИНС, блок видеоинформации, соединенный выходом и входом с входом и выходом блока коммутации соответственно, сервер ЭОК, соединенный с блоком коммутации, по крайней мере, линиями передачи данных CAN, ГОСТ Р 52070-2003, имитируемого сигнала (ИС) радиолокационной станции (РЛС), и сервер имитации ИНС, подключенные к локальной вычислительной сети (ЛВС), с которой соединены АРМ оператора ЭОК и блок коммутации, который выполнен с возможностью подключения к оборудованию судовой ИНС, по крайней мере, линиями передачи данных ЛВС, аналогового видеосигнала (ABC), RS-422/485, дискретных и аналоговых сигналов (ДАС), CAN, ГОСТ Р 52070-2003, ИС РЛС.
Технический результат достигается также тем, что:
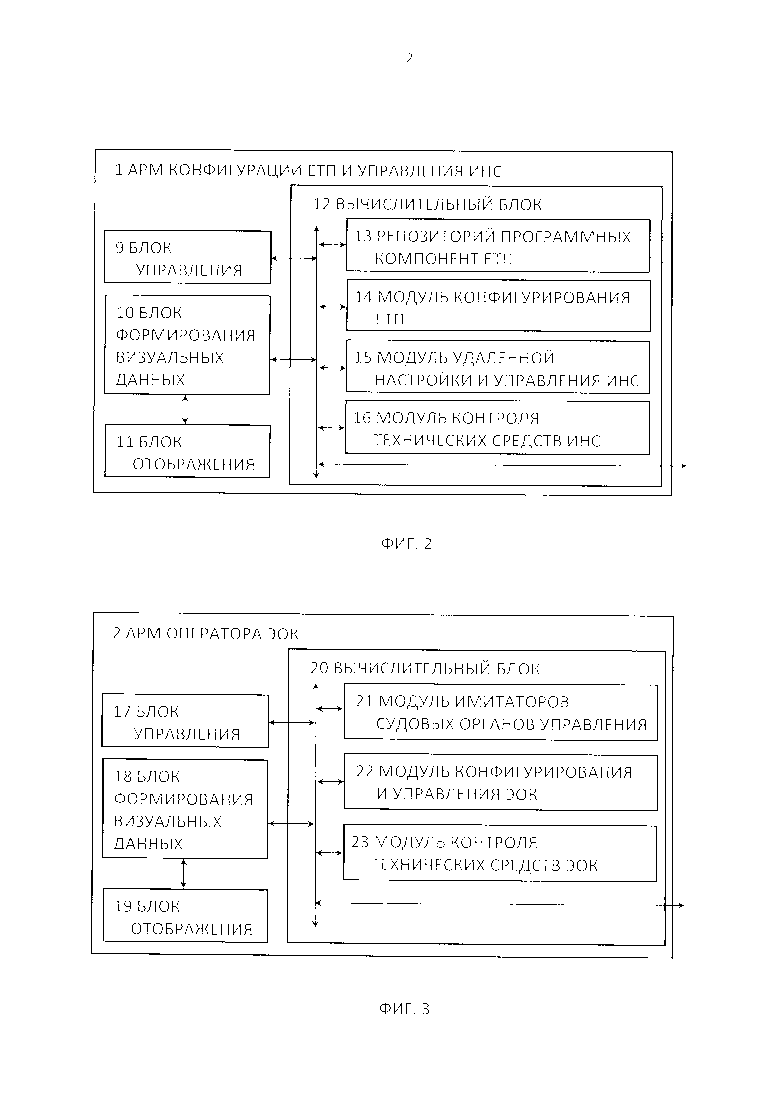
АРМ конфигурации ЕТП и управления ИНС включает блок управления и связанный с устройством отображения блок формирования визуальных данных, связанные с вычислительным блоком, который содержит взаимосвязанные репозиторий программных компонент ЕТП, модуль конфигурирования ЕТП, модуль удаленной настройки и управления ИНС и модуль контроля технических средств ИНС;
АРМ оператора ЭОК включает блок управления и связанный с устройством отображения блок формирования визуальных данных, связанные с вычислительным блоком, который содержит взаимосвязанные модуль имитаторов судовых органов управления, модуль конфигурирования и управления ЭОК и модуль контроля технических средств ЭОК;
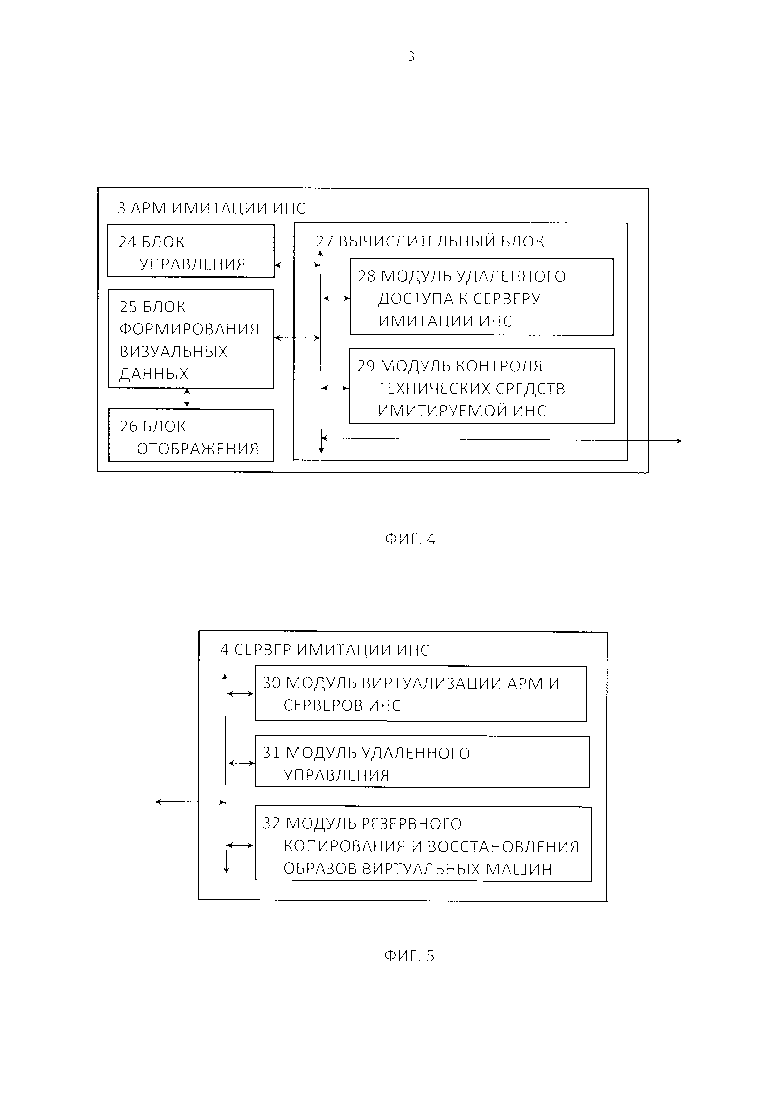
АРМ имитации ИНС включает блок управления и связанный с устройством отображения блок формирования визуальных данных, связанные с вычислительным блоком, который содержит взаимосвязанные модуль удаленного доступа к серверу имитации ИНС и модуль контроля технических средств имитируемой ИНС;
сервер имитации ИНС включает взаимосвязанные модуль виртуализации АРМ и серверов ИНС, модуль удаленного управления и модуль резервного копирования и восстановления образов виртуальных машин;
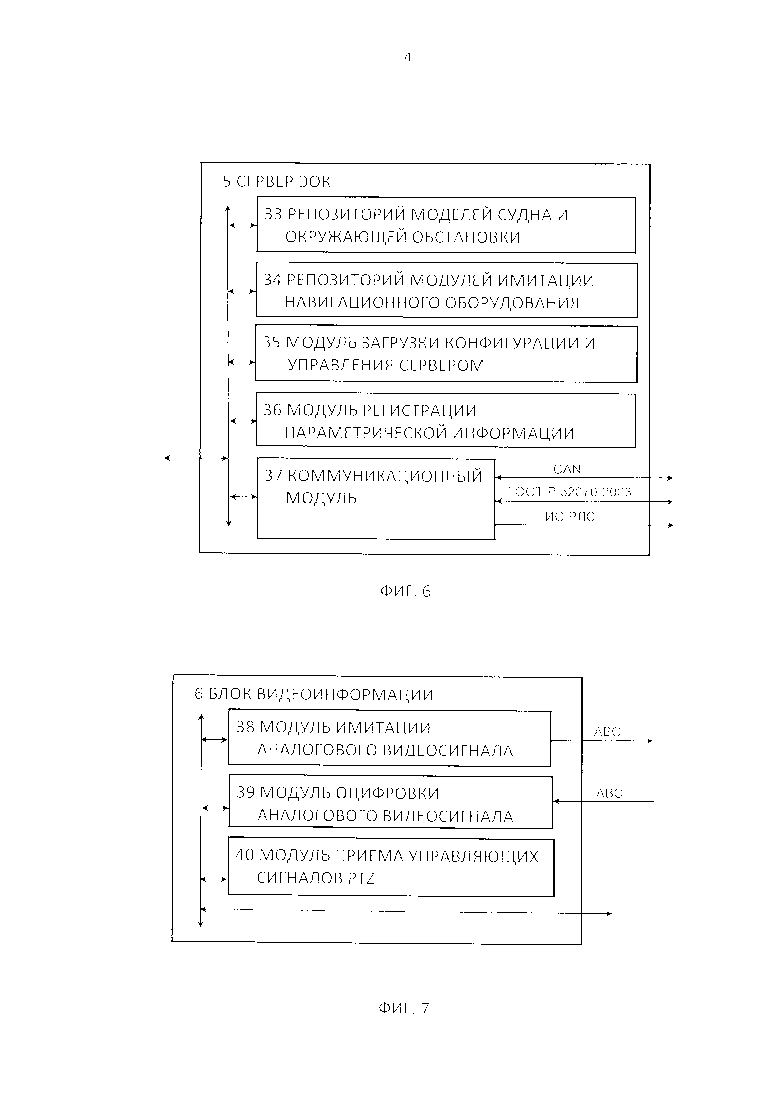
сервер ЭОК включает взаимосвязанные репозиторий моделей судна и окружающей обстановки, репозиторий модулей имитации навигационного оборудования, модуль загрузки конфигурации и управления сервером, модуль регистрации параметрической информации и коммуникационный модуль;
блок видеоинформации включает взаимосвязанные модуль имитации аналогового видеосигнала, модуль оцифровки аналогового видеосигнала и модуль приема управляющих сигналов PTZ;
локальная вычислительная сеть подключена к глобальной сети Интернет.
Сущность заявляемого экспериментально-отладочного комплекса (ЭОК) для судовых интегрированных навигационных систем (ИНС) поясняется примером его реализации и чертежами, где изображено:
на фиг. 1 - структурная электрическая схема комплекса;
на фиг. 2 - структурная электрическая схема АРМ конфигурации ЕТП и управления ИНС;
на фиг. 3 - структурная электрическая схема АРМ оператора ЭОК;
на фиг. 4 - структурная электрическая схема АРМ имитации ИНС;
на фиг. 5 - структурная электрическая схема сервера имитации ИНС;
на фиг. 6 - структурная электрическая схема сервера ЭОК;
на фиг. 7 - структурная электрическая схема блока видеоинформации.
Экспериментально-отладочный комплекс включает (фиг. 1) АРМ 1 конфигурации ЕТП и управления ИНС, АРМ 2 оператора ЭОК, АРМ 3 имитации ИНС, сервер 4 имитации ИНС, сервер 5 ЭОК, блок 6 видеоинформации и блок 7 коммутации, объединенные ЛВС 8.
Автоматизированное рабочее место 1 конфигурации ЕТП и управления ИНС предназначено для управления репозиторием программных компонентов ЕТП, конфигурирования программных компонентов ЕТП на подключенной ИНС (или имитируемой ИНС средствами сервера 4 имитации ИНС), управления ИНС в процессе отладки и для контроля технического состояния средств подключенной и/или имитируемой ИНС. Автоматизированное рабочее место 1 включает (фиг. 2) блок 9 управления, блок 10 формирования визуальных данных, блок 11 отображения и вычислительный блок 12, включающий:
репозиторий 13 программных компонент ЕТП, предназначенный для записи, хранения и удаления программных компонент ЕТП, обеспечивающих решение всех задач ИНС в различных конфигурациях, а также обеспечения доступа к ним в процессе разработки и/или имитации ИНС;
модуль 14 конфигурирования ЕТП, предназначенный для конфигурирования выбранных программных компонентов ЕТП с целью обеспечения их взаимодействия в рамках разрабатываемой и/или отлаживаемой ИНС в соответствии с функционально-техническими требованиями к ней;
модуль 15 удаленной настройки и управления ИНС, предназначенный для копирования выбранных программных компонент ЕТП на аппаратные средства (вычислители, коммутаторы) разрабатываемой и/или имитируемой ИНС, их последующей конфигурации и управления процессом запуска и работы целевой ИНС;
модуль 16 контроля технических средств ИНС, обеспечивающий автоматизированный контроль технического состояния аппаратных средств разрабатываемой и/или имитируемой ИНС.
Аппаратную часть АРМ 1 может составлять персональный компьютер (основные технические характеристики: процессор Intel Core i7-7700, оперативная память 16 Гб, жесткий диск SSD 500 U6, жесткий диск HDD 4 Тб, привод DVD-RW, два монитора Dell U2412M 1920x1200, клавиатура и манипулятор «мышь»). В состав программного обеспечения (ПО) АРМ 1 входит операционная система Windows 7 Pro.
Автоматизированное рабочее место 2 оператора ЭОК предназначено для конфигурирования модулей сервера 5 ЭОК и управления их работой, а также для контроля технического состояния средств ЭОК. Автоматизированное рабочее место 2 включает (фиг. 3) блок 17 управления, блок 18 формирования визуальных данных, блок 19 отображения и вычислительный блок 20, включающий:
модуль 21 имитаторов судовых органов управления, предназначенный для управления математической моделью судна, выполняющейся на сервере 5 ЭОК;
модуль 22 конфигурирования и управления ЭОК, предназначенный для конфигурирования сервера 5 ЭОК путем выбора загружаемой математической модели судна и окружающей обстановки из репозитория моделей судна и окружающей обстановки и модулей имитации навигационного оборудования из репозитория модулей имитации навигационного оборудования, установки начальных параметров выбранных математической модели судна, окружающей обстановки и модулей имитации навигационного оборудования, управления сервером 5 ЭОК в процессе его работы;
модуль 23 контроля технических средств ЭОК, предназначенный для автоматизированного контроля аппаратных средств ЭОК.
Аппаратную часть АРМ 2 может составлять персональный компьютер (основные технические характеристики: процессор - Intel Core i7-7700, оперативная память - DDR3 16Гб, жесткий диск - SSD 512Гб, привод DVD-RW, два монитора Dell U2412M 1920x1200, клавиатура и манипулятор «мышь»). В состав ПО АРМ 2 входит операционная система Windows 7 Pro.
Автоматизированное рабочее место 3 имитации ИНС предназначено для имитации одного (или нескольких) из АРМ имитируемой ИНС, а также для отображения технического состояния средств имитируемой ИНС. Автоматизированное рабочее место 3 включает (фиг. 4) блок 24 управления, блок 25 формирования визуальных данных, блок 26 отображения и вычислительный блок 27, включающий:
модуль 28 удаленного доступа к серверу имитации ИНС, предназначенный для управления работой виртуальными машинами, запущенными на сервере 4 имитации ИНС;
модуль 29 контроля технических средств имитируемой ИНС, предназначенный для автоматизированного контроля работы виртуальных машин, выполняющихся на сервере 4 имитации ИНС.
Аппаратную часть АРМ 3 может составлять персональный компьютер промышленного исполнения (основные технические характеристики: процессор - Intel Core i7-7700, оперативная память - DDR3 16Гб, жесткий диск - SSD 512Гб, привод DVD-RW, два монитора Dell U2412M 1920×1200, клавиатура и манипулятор «мышь»). В состав ПО АРМ 3 входит операционная система Windows 7 Pro.
Сервер 4 имитации ИНС предназначен для имитации отсутствующих АРМ и серверов ИНС с возможностью сохранения и восстановления их образов. Сервер 4 включает (фиг. 5):
модуль 30 виртуализации АРМ и серверов ИНС, предназначенный для запуска виртуальных машин, имитирующих работу АРМов и серверов имитируемой ИНС;
модуль 31 удаленного управления, предназначенный для управления программным обеспечением (компонентами ЕТП), работающим на виртуальных машинах сервера 4 имитации ИНС;
модуль 32 резервного копирования и восстановления образов виртуальных машин, предназначенный для ведения репозитория образов виртуальных машин, восстановления виртуальных машин из этих образов и копирования виртуальных машин в образы.
Оборудование сервера 4 имитации ИНС включает, например, непосредственно сервер вычислительный RAMEC TORNADO Server Custom на платформе Supermicro 6029P-TR, на базе двух процессоров Intel XEON Silver 4110, ОЗУ Kingston DDR4 DIMM 16Gb PC4-17000/2133 ECC REG (8 шт.), накопитель SSD Intel 960Gb 2,5" SSDSC2BB960G701 S3520 SATAIII (2 шт.), сетевая карта Intel I350T4V2BLK, видеоадаптер PNY Quadro K620 2048MB DVI/DP PCI-E, НЖМД 4.0Tb Seagate ST4000NM0035 7200/128 SATAIII (6 шт.).
Сервер 5 ЭОК предназначен для выработки, регистрации и передачи по различным интерфейсам данных имитируемых систем судна. Сервер 5 включает (фиг. 6):
репозиторий 33 моделей судна и окружающей обстановки, предназначенный для записи, хранения и предоставления доступа к моделям судна и окружающей обстановки;
репозиторий 34 модулей имитации навигационного оборудования, предназначенный для записи, хранения и предоставления доступа к модулям имитации навигационного оборудования;
модуль 35 загрузки конфигурации и управления сервером, обеспечивающий совместную работу модели судна, моделей навигационного оборудования, модулей имитации, модуля регистрации параметрической информации и коммуникационного модуля в заданной с АРМ 2 оператора ЭОК конфигурации, а также управления работой сервера в ходе имитации;
модуль 36 регистрации параметрической информации, обеспечивающий регистрацию параметрической информации, вырабатываемой моделью судна, моделями навигационного оборудования и модулями имитации, а также передачу ранее зарегистрированной параметрической информации в коммуникационный модуль для реализации режима воспроизведения;
коммуникационный модуль 37, предназначенный для передачи информации от модели судна, моделей навигационного оборудования, модулей имитации и модуля регистрации параметрической информации по линиям передачи данных ЛВС, CAN, ГОСТ Р 52070, RS-422/485.
На сервере 5 размещается общее и специальное программного обеспечение, предназначенное для выполнения основных функций генерации имитируемых данных и предоставления необходимой информации для работы АРМ и серверов, входящих в состав разрабатываемой и/или имитируемой ИНС.
Оборудование сервера 5 включает, например, непосредственно сервер вычислительный RAMEC TORNADO Light Custom на базе материнской платы SuperMicro MBD-X10SAT с процессором Intel Core i7-4790, накопитель SSD Intel 960Gb 2,5" SSDSC2BB960G701 S3520 SATAIII (2 шт.), корпус Chenbro 4U RM41300-F2-U3, ОЗУ Kingston DDR3 8Gb PC12800/1600 (2 шт.), плата СОМ-портов Моха CP-118E-A-I (2 шт.), плата Элкус ГОСТ Р 52070-2003 (MIL-STD-1553 В) ТА1-РЕ2 (2 шт.), двухканальная плата сопряжения шины Элкус PCIExl CAN-200PCIE (2 шт.).
На сервере 4 имитации ИНС и сервере 5 ЭОК установлена операционная система Ubuntu 16.04 AMD64 Server. К дополнительному серверному программному обеспечению следует отнести телекоммуникационные программные средства, средства антивирусной защиты, сервисные программные средства и др.
Блок 6 видеоинформации предназначен для имитации приемников и источников аналоговой видеоинформации при отладке системы видеонаблюдения, входящей в состав ИНС, оцифровки аналогового видеосигнала и приема управляющих сигналов PTZ-видеокамеры. Блок 6 включает (фиг. 7) модуль 38 имитации аналогового видеосигнала, модуль 39 оцифровки аналогового видеосигнала и модуль 40 приема управляющих сигналов PTZ и представляет собой, например, видеокодер Beward В1114 для оцифровки аналогового видеосигнала, аналоговая видеокамера Beward M-962VD7 для имитации аналогового видеосигнала и IP-видеокамера TKPTZ-700IR-HD для приема и отработки управляющих PTZ сигналов.
Блок 7 коммутации предназначен для коммутации ЭОК и объекта испытаний (ОИ) для обмена данными (ЛВС, CAN, ГОСТ Р 52070-2003, ИС РЛС, ABC) по линиям связи, а также обеспечивает передачу данных ЛВС, RS-422/485 и ДАС между разнотипными линиями связи, и представляет собой, например, 32-портовый асинхронный сервер Моха NPort 6650-32, обеспечивающий передачу данных между линиями связи ЛВС и RS-422/485, комплект модулей Wago, обеспечивающий передачу данных ЛВС и ДАС между линиями связи, патч-панели для коммутации ЭОК и ОИ по линиям связи передачи данных ЛВС, CAN, ГОСТ Р 52070-2003, ИС РЛС и ABC.
В качестве ОИ может быть ИНС или ее составная часть.
Локальная вычислительная сеть 8 предназначена для передачи данных по сети Ethernet 100/1000 BASE-T между элементами ЭОК и включает коммутатор, например, типа Eltex MES2324, и проводные линии связи.
Экспериментально-отладочный комплекс для судовых ИНС работает в следующих режимах: конфигурирование сервера ЭОК (режим работы 1), конфигурирование ЕТП и ИНС (режим работы 2) и имитация функционирования и отладка ИНС (режим работы 3).
В режиме работы 1 происходит формирование конфигурации сервера 5 ЭОК, отвечающей функциональным и техническим требованиям, стоящим перед разрабатываемой и/или отлаживаемой ИНС или ее составной части, являющиеся ОИ. Данные базовой конфигурации сервера 5 ЭОК, хранящиеся в модуле 22 конфигурирования и управления ЭОК автоматизированного рабочего места 2 оператора ЭОК, поступают в блок 18 формирования визуальных данных, где преобразовываются для визуализации блоком 19 отображения. Посредствам команд блок 17 управления АРМ 2 оператора ЭОК выполняется выбор необходимых математических моделей судна и окружающей обстановки, набора модулей имитации навигационного оборудования, хранящиеся в репозиторий 33 моделей судна и навигационного оборудования и репозиторий 34 модулей имитации сервера 5 ЭОК соответственно. Результаты выбора отображаются блоком 19 отображения АРМ 2 оператора ЭОК. Далее с блока 17 управления АРМ 2 задаются необходимые установки и начальные значения параметров для выбранных модели судна и модулей имитации навигационного оборудования, которые сохраняются в модуле 22 конфигурирования и управления ЭОК, а также вводятся соответствующие данные для работы модуля 36 регистрации параметрической информации и коммуникационного модуля 37, которые из АРМ 2 оператора ЭОК передаются по ЛВС 8 в соответствующие блоки сервера 5 ЭОК. Итоговая полная конфигурация сервера 5 ЭОК, сформированная в модуле 22 конфигурирования и управления ЭОК, сохраняется в виде набора файлов конфигурации, которые передаются по ЛВС 8 в модуль 35 загрузки конфигурации и управления сервером сервера 5 ЭОК. Модуль 35 в соответствии с итоговой конфигурацией сервера 5 ЭОК загружает из репозитория 33 моделей судов и окружающей обстановки и репозитория 34 модулей имитации навигационного оборудования необходимые программные компоненты ЭОК и конфигурирует их путем задания требуемых параметров, а также выполняет конфигурирование модуля 36 регистрации параметрической информации и коммуникационного модуля 37 сервера 5 ЭОК, обеспечивающих передачу, прием и регистрацию навигационных и иных данных сервером 5 ЭОК, который через блок 7 коммутации связан с ОИ, а по ЛВС 8 соединен с АРМ 3 и сервером 4 имитации ИНС.
В режиме работы 2 происходит формирование конфигурации ЕТП и конфигурирование разрабатываемой и/или отлаживаемой ИНС, являющейся ОИ. Данные базовой конфигурации ЕТП, хранящиеся в модуле 14 конфигурирования ЕТП автоматизированного рабочего места 1 конфигурации ЕТП и управления ИНС, поступают в блок 10 формирования визуальных данных, где преобразовываются для визуализации блоком 11 отображения АРМ 1. Посредствам команд блок 9 управления АРМ 1 при необходимости выполняется выбор ранее заданной конфигурации ЕТП, хранящиеся в модуле 14 конфигурирования ЕТП. Результаты выбора отображаются блоком 11. Далее с блока 9 управления АРМ 1 конфигурации ЕТП и управления ИНС выполняется выбор необходимых программные компоненты ЕТП, хранящиеся в репозиторий 13 программных компонент ЕТП, и их дополнительное конфигурирование в соответствии функционально-техническими требования к ОИ. Достигаемая при этом оптимизация архитектуры ИНС в зависимости от требований заказчика, типа судна и состава его навигационного оборудования обусловлена тем, что распределенная, слабосвязанная, построенная на обмене сообщениями архитектура ЕТП в совокупности с высокой модульностью реализации программных компонентов ЕТП позволяют формировать на базе ЕТП широкий спектр конфигураций ИНС с минимальной избыточностью как архитектуры, так и самой программной реализации ИНС, обеспечивая оптимальное соответствие ИНС конкретным потребностям заказчика. Результаты выбора и конфигурации сохраняются в модуле 15 удаленной настройки и управления ИНС и отображаются блоком 11. Посредствам команд блок 9 управления АРМ 1 устанавливается разделение полного функционала исследуемой ИНС между ее реальной частью, подключаемой к блоку 7 коммутации, и имитируемыми (виртуальными) частями ИНС, функционирующими на сервере 4 имитации ИНС и/или АРМ 3 имитации ИНС. Полная конфигурация ИНС, включающая конфигураций АРМов и серверов ИНС, сохраняется в виде набора файлов конфигурации в модуле 15 удаленной настройки и управления ИНС автоматизированного рабочего места 1 конфигурации ЕТП и управления ИНС.
В режиме работы 3 выполняется запуск исследуемой ИНС, имитация поступления необходимых навигационных и иных параметров в ИНС и отладка работы ИНС в целом или ее составной части. Блок 9 управления АРМ 1 конфигурации ЕТП и управления ИНС по ЛВС 8 передает в модуль 31 удаленного управления сервера 4 имитации ИНС команды на разворачивание образов, хранящихся в модули 32 резервного копирования и восстановления образов виртуальных машин, и старта необходимых виртуальных машин для имитируемых АРМ и серверов ИНС. Далее модуль 15 удаленной настройки и управления ИНС автоматизированного рабочего места 1 конфигурации ЕТП и управления ИНС по ЛВС 8 загружает через модуль 31 удаленного управления на запущенные на сервере 4 имитации ИНС виртуальные машины необходимые программные компоненты ЕТП и соответствующие конфигурации имитируемых АРМ и серверов ИНС, а через блок 7 коммутации необходимые программные компоненты ЕТП и соответствующие конфигурации АРМ и серверов ИНС на реальную часть разрабатываемой и/или отлаживаемой ИНС, являющейся ОИ. Вся информация о процессе запуска виртуальных и реальных машин для имитируемых и реальных АРМ и серверов ИНС, в том числе данные о загруженных на них программных компонентов ЕТП и конфигураций передаются в модуль 15 удаленной настройки и управления ИНС, которые после обработки поступают в блок 10 формирования визуальных данных, где преобразовываются для визуализации блоком 11 отображения. Блок 9 управления АРМ 1 конфигурации ЕТП и управления ИНС по ЛВС 8 передает в модуль 31 удаленного управления сервера 4 имитации ИНС команду на старт виртуальных серверов модуля 30 виртуализации АРМ и серверов ИНС и в блок 7 коммутации команду на старт реальных серверов ИНС. Данные о запуске реальных и виртуальных серверов ИНС поступают в модуль 15 удаленной настройки и управления ИНС, который после успешного старта всех серверов передает по ЛВС 8 передает в модуль 31 удаленного управления сервера 4 имитации ИНС команду на старт виртуальных АРМ модуля 30 виртуализации АРМ и серверов ИНС и в блок 7 коммутации команду на старт реальных АРМ ИНС. Вся информация о процессе старта виртуальных и реальных АРМ и серверов ИНС передается по ЛВС 8 в модуль 15 удаленной настройки и управления ИНС, которая после обработки поступает в блок 10 формирования визуальных данных, где преобразовываются для визуализации блоком 11 отображения АРМ 1 конфигурации ЕТП и управления ИНС. После старта программных компонентов ЕТП на всех виртуальных и реальных АРМ и серверах ИНС исследуемая ИНС готова к штатной работе с навигационными и иными данными. По команде блока 17 управления АРМ 2 оператора ЭОК модуль 22 конфигурирования и управления ЭОК передает по ЛВС 8 в модуль 35 загрузки конфигурации и управления сервером команду на запуск сервера 5 ЭОК, который начинает моделировать навигационные и иные параметры в соответствии с заданной конфигурацией, регистрировать их посредством модуля 36 регистрации параметрической информации и передавать по ЛВС 8 на виртуальные АРМ ИНС и виртуальные серверы ИНС сервера 4 имитации ИНС и/или через коммуникационный модуль 37 и блок 7 коммутации по линиям передачи данных CAN, RS-422/485, ГОСТ Р 52070, ДАС, ИС РЛС на ОИ, в качестве которого может быть ИНС или ее составная часть. АРМ 3 имитации ИНС визуализирует и контролирует работу имитируемых АРМ разрабатываемой ИНС, запущенных на сервере 4 имитации ИНС. Далее выполняется исследование и отладка работы ИНС согласно методике испытаний, обеспечивая при этом отработку функционирования ИНС в максимально полном составе при минимально необходимом использовании реальных компонентов ИНС в составе ОИ, что позволяет снизить затраты на отладку ИНС и интеграцию нового оборудования. По команде блока 17 управления АРМ 2 оператора ЭОК модуль 21 имитаторов судовых органов управления имитирует использование судовых органов управления на реальном судне, управляющие сигналы которых через модуль 22 конфигурирования и управления ЭОК по ЛВС 8 передаются на сервер 5 ЭОК в математическую модель судна, учитывающую в своей работе влияние органов управления на реальное судно и обеспечивающую моделирование судна как динамической управляемой системы. Блок 17 управления АРМ 2 оператора ЭОК через модуль 22 конфигурирования и управления ЭОК управляет текущими параметрами моделей судна и окружающей обстановки, модулей имитации навигационного оборудования сервера 5 ЭОК, реализуя моделирование поведения управляемого судна в условиях изменяемой в необходимых пределах окружающей обстановки с управляемым поведением имитируемого навигационного оборудования и обеспечивая таким образом формирование навигационных и иных выходных данных ЭОК во всем требуемом диапазон условий функционирования исследуемой и отлаживаемой ИНС. Для имитации приемников и источников аналоговой видеоинформации при отладке системы видеонаблюдения, входящей в состав ИНС, используется блок 6 видеоинформации, команды на который поступают по ЛВС 8 от АРМ 2 оператора ЭОК. При исследовании и отладки работы ИНС в модуль 23 контроля технических средств ЭОК автоматизированного рабочего места 2 оператора ЭОК по ЛВС 8 поступают данные о состоянии сервера 5 ЭОК, которые после обработки поступают в блок 18 формирования визуальных данных и далее результаты контроля технических средств отображаются блоком 19 отображения АРМ 2 оператора ЭОК. В то же время в модуль 16 контроля технических средств ИНС автоматизированного рабочего места 1 конфигурации ЕТП и управления ИНС по ЛВС 8 поступают данные о состоянии технических средств исследуемой ИНС, которые после обработки поступают в блок 10 формирования визуальных данных и далее результаты контроля отображаются блоком 11 отображения АРМ 1.
Полный цикл исследования и/или отладки ИНС включает в себя несколько этапов, при этом ЭОК последовательно работает в вышеописанных режимах. На первом этапе выполняется конфигурирование средств имитации сервера ЭОК под требования использования разрабатываемой ИНС (режим работы 1). На втором этапе происходит формирование требуемой ИНС из программных компонентов ЕТП (режим работы 2). На третьем этапе выполняется конфигурирование сформированной ИНС (режим работы 2). На четвертом этапе происходит загрузка и старт виртуальных и реальных АРМ и серверов разрабатываемой ИНС (режим работы 3). На пятом этапе выполняется запуск имитации навигационного оборудования и технических средств судна сервером ЭОК (режим работы 3). На шестом этапе осуществляется проверка функционирования ИНС согласно методике испытаний (режим работы 3), если выявлены замечания в работе ИНС, выполняется работа с третьего по шестой этапы. На заключительном этапе выполняется создание образов аппаратных вычислительных средств ИНС и сохранение конфигураций ЕТП разработанной ИНС для дальнейшего использования.
Поддержание актуального состояния репозитория 13 программных компонент ЕТП обеспечивается заменой и/или добавлением обновляемых и/или добавляемых программных компонент ЕТП с соответствующими конфигурациями в репозиторий 13 путем загрузки и установки их с Интернет ресурсов разработчиков оборудования ИНС и/или со сменных носителей, распространяемых разработчиками. Выпуск новых и/или обновление программных компонент ЕТП производится разработчиками оборудования ИНС по мере расширения спектра сопрягаемых современных судовых систем и навигационного оборудования, расширения функциональных возможностей серверов и АРМ перспективных ИНС.
Заявленное изобретение реализовано в опытном образце ЭОК для судовых ИНС, обладающий расширенными функциональными возможностями, которые в совокупности позволили сократить сроки разработки ИНС, снизить затраты на отладку СПО для ИНС, а также затраты на интеграцию нового оборудования в ИНС, тем самым обеспечить ее конкурентоспособность.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| Стенд комплексирования информационно-управляющих систем многофункциональных летательных аппаратов | 2016 |
|
RU2632546C1 |
| Учебно-тренировочный комплекс связи надводного корабля | 2021 |
|
RU2783021C1 |
| ТРЕНАЖЁРНЫЙ ЦЕНТР ДЛЯ ЭКИПАЖЕЙ СУДОВ | 2016 |
|
RU2632675C2 |
| ПОДВИЖНАЯ АВТОМАТИЗИРОВАННАЯ МАШИНА СВЯЗИ И УПРАВЛЕНИЯ РОБОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2021 |
|
RU2762624C1 |
| Автоматизированная система сбора и распространения цифровой картографической информации водных путей | 2024 |
|
RU2833209C1 |
| КОМПЛЕКС СРЕДСТВ УПРАВЛЕНИЯ И СВЯЗИ ДЛЯ АВТОМАТИЗИРОВАННОЙ ПЕРЕДВИЖНОЙ ЕДИНИЦЫ | 2023 |
|
RU2822692C1 |
| Тренажерный комплекс для подготовки эксплуатационного персонала Автоматизированных систем управления технологическим процессом (АСУ ТП) | 2019 |
|
RU2699688C1 |
| АППАРАТНО-ИМИТАЦИОННЫЙ КОМПЛЕКС СИСТЕМ УПРАВЛЕНИЯ И ЭЛЕМЕНТОВ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ ДЛЯ ОТЛАДКИ СУДОВЫХ СИСТЕМ УПРАВЛЕНИЯ ОБЪЕКТОВ АРКТИЧЕСКОЙ МОРСКОЙ ТЕХНИКИ | 2017 |
|
RU2668004C1 |
| АВТОМАТИЗИРОВАННЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2003 |
|
RU2234138C1 |
Экспериментально-отладочный комплекс (ЭОК) предназначен для разработки и отладки судовых интегрированных навигационных систем (ИНС). Комплекс содержит автоматизированное рабочее место (АРМ) оператора ЭОК, АРМ конфигурации единой технологической платформы и управления ИНС, АРМ имитации ИНС, сервер ЭОК и блок видеоинформации, соединенные с блока коммутации, и сервер имитации ИНС, подключенные к локальной вычислительной сети, при чем блок коммутации выполнен с возможностью подключения к оборудованию судовой ИНС, а локальная вычислительная сеть подключена к глобальной сети Интернет. Комплекс обеспечивает расширение функциональных возможностей, что позволяет сократить сроки разработки судовых ИНС, снизить затраты на отладку специального программного обеспечения для ИНС, а также затрат на интеграцию нового оборудования в ИНС, тем самым обеспечить ее конкурентоспособность. 7 з.п. ф-лы, 7 ил.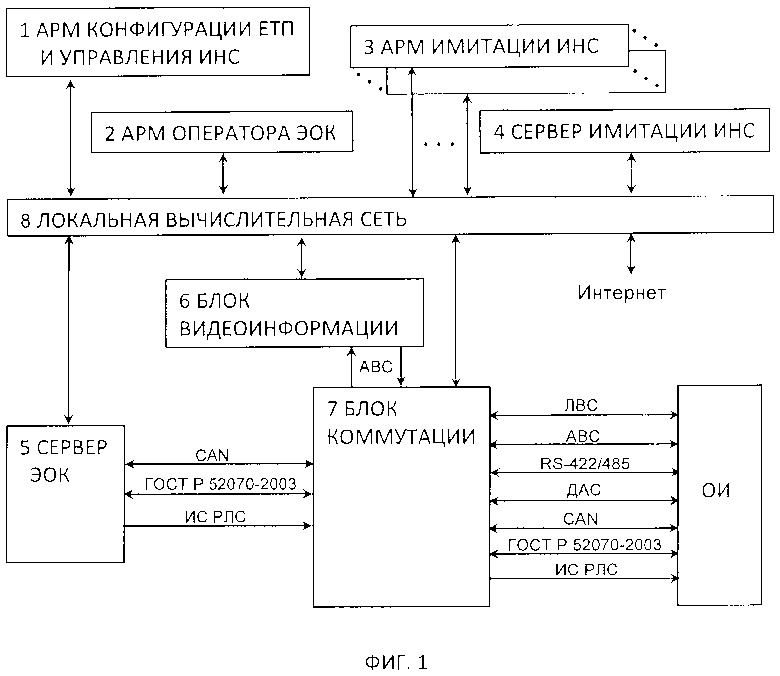
1. Экспериментально-отладочный комплекс (ЭОК) для судовых интегрированных навигационных систем (ИНС), содержащий автоматизированное рабочее место (АРМ) оператора ЭОК и блок коммутации, отличающийся тем, что в состав комплекса включены АРМ конфигурации единой технологической платформы (ЕТП) и управления ИНС, АРМ имитации ИНС, блок видеоинформации, соединенный выходом и входом с входом и выходом блока коммутации соответственно, сервер ЭОК, соединенный с блоком коммутации, по крайней мере, линиями передачи данных CAN, интерфейса магистрального последовательного, имитируемого сигнала радиолокационной станции, и сервер имитации ИНС, подключенные к локальной вычислительной сети, с которой соединены АРМ оператора ЭОК и блок коммутации, который выполнен с возможностью подключения к оборудованию судовой ИНС, по крайней мере, линиями передачи данных локальной вычислительной сети, аналогового видеосигнала, RS-422/485, дискретных и аналоговых сигналов, CAN, интерфейса магистрального последовательного, имитируемого сигнала радиолокационной станции.
2. Экспериментально-отладочный комплекс по п. 1, отличающийся тем, что АРМ конфигурации ЕТП и управления ИНС включает блок управления и связанный с устройством отображения блок формирования визуальных данных, связанные с вычислительным блоком, который содержит взаимосвязанные репозиторий программных компонент ЕТП, модуль конфигурирования ЕТП, модуль удаленной настройки и управления ИНС и модуль контроля технических средств ИНС.
3. Экспериментально-отладочный комплекс по п. 1, отличающийся тем, что АРМ оператора ЭОК включает блок управления и связанный с устройством отображения блок формирования визуальных данных, связанные с вычислительным блоком, который содержит взаимосвязанные модуль имитаторов судовых органов управления, модуль конфигурирования и управления ЭОК и модуль контроля технических средств ЭОК.
4. Экспериментально-отладочный комплекс по п. 1, отличающийся тем, что АРМ имитации ИНС включает блок управления и связанный с устройством отображения блок формирования визуальных данных, связанные с вычислительным блоком, который содержит взаимосвязанные модуль удаленного доступа к серверу имитации ИНС и модуль контроля технических средств имитируемой ИНС.
5. Экспериментально-отладочный комплекс по п. 1, отличающийся тем, что сервер имитации ИНС включает взаимосвязанные модуль виртуализации АРМ и серверов ИНС, модуль удаленного управления и модуль резервного копирования и восстановления образов виртуальных машин.
6. Экспериментально-отладочный комплекс по п. 1, отличающийся тем, что сервер ЭОК включает взаимосвязанные репозиторий моделей судна и окружающей обстановки, репозиторий модулей имитации навигационного оборудования, модуль загрузки конфигурации и управления сервером, модуль регистрации параметрической информации и коммуникационный модуль.
7. Экспериментально-отладочный комплекс по п. 1, отличающийся тем, что блок видеоинформации включает взаимосвязанные модуль имитации аналогового видеосигнала, модуль оцифровки аналогового видеосигнала и модуль приема управляющих сигналов PTZ.
8. Экспериментально-отладочный комплекс по п. 1, отличающийся тем, что локальная вычислительная сеть подключена к глобальной сети Интернет.
| Стенд комплексирования информационно-управляющих систем многофункциональных летательных аппаратов | 2016 |
|
RU2632546C1 |
| Циркуль | 1929 |
|
SU15933A1 |
| КОМПЛЕКС ОТЛАДКИ | 2010 |
|
RU2448363C1 |
| 0 |
|
SU172330A1 |

