Настоящая система относится к системе магнитно-резонансной томографии (МРТ) для уменьшения артефактов движения в реконструированных магнитно-резонансных (МР) изображениях, которые захватывают с использованием способов захвата многокадровых (ms) изображений и, более конкретно, к системе МРТ, которая может включать уменьшение артефактов, возникающих из-за межкадрового движения при захватах многокадровых МР-изображений, и к способу ее функционирования.
Захваты многокадровых (ms) изображений широко применяются в приложениях клинической магнитно-резонансной томографии (МРТ) для получения диагностической информации с высоким пространственным разрешением. Известны два распространенных способа многокадрового МР-отображения: способ турбо-спин-эхо (TSE) и способ многокадрового планарного эхо (отраженного сигнала) (ms-EPI). Эти способы отображения могут использоваться для получения диффузионно-взвешенных изображений с высоким пространственным разрешением (DWI). Однако, межкадровое движение почти неизбежно и может приводить к ухудшенной четкости изображения в многокадровых МР-изображениях. Дополнительно, поскольку многокадровые способы требуют многочисленных захватов данных, они могут требовать более длительных времен захвата данных, чем это требуется для однокадровых захватов. Эти более длительные времена захватов могут обострять проблемы межкадрового движения.
Например, при основанном на ms-EPI диффузионно-взвешенном отображении (DWI) небольшие количества межкадрового движения могут вносить значительный фазовый сдвиг между межкадровыми изображениями. Хотя при попытке удаления этого внесенного фазового сдвига могут использоваться способы коррекции, основанные на навигаторе, причем такие основанные на навигаторе способы коррекции не действуют, если межкадровое движение различается между навигационными данными и фактическими данными DWI. Предположение способов коррекции, основанных на навигаторе, состоит в том, что данные навигатора и соответствующие данные изображения обладают одной и той же фазой. Если между навигатором и соответствующим захватом данных изображения для захватов кадров изображений существует движение, фаза от навигатора не может точно корректировать фазовый сдвиг в кадрах изображений. Чтобы избежать этой проблемы, может использоваться способ коррекции фаз, не применяющий способ коррекции, основанный на навигаторе. Один такой способ коррекции фаз опирается на способ усредненной реконструкции (здесь далее - способ усреднения), который выполняет усредненную реконструкцию (R5) каждого кадра многокадрового набора. Реконструкция каждого кадра формируется с использованием способа частично параллельного отображения (PPI), такого как способ кодирования чувствительности (SENSE). К сожалению, способ SENCE может существенно снижать отношение "сигнал-шум" (SNR) и может вводить артефакты изображения, особенно, когда число кадров при многокадровом захвате больше порогового значения, такого как 4. Таким образом, при использовании стандартного способа усреднения PPI, SNR может существенно уменьшиться, а при использовании стандартного способа, основанного на навигаторе, фазовый сдвиг не может быть эффективно удален.
Хотя способы TSE-отображения являются наиболее надежным инструментом для многих применений МР томографии, способы TSE-отображения чувствительны к движению. В то время как многие способы подавления движения подавляют артефакты грубого движения, они обычно не могут эффективно подавлять артефакты плавного движения. Однако, при попытке подавления артефактов плавного движения был разработан способ (R7) свертки и объединения данных (COCOA). К сожалению, даже при использовании способа COCOA, некоторые остаточные артефакты движения все еще могут наблюдаться. Более конкретно, способ COCOA может использоваться в способах TSE-отображения для уменьшения артефактов движения, возникающих из-за непрерывного плавного движения. Однако, если движение является значительным, способ COCOA может быть непригоден, поскольку могут наблюдаться некоторые остаточные артефакты.
Дополнительно, недавно внедренный способ MUSE (R1) может искусно использовать фазовую информацию из первоначальной реконструкции SENCE (R2) в мультиплексированной системе уравнений SENCE. В этом способе коэффициент SENCE на начальной операции SENCE может равняться числу кадров. К сожалению, высококачественные ms-EPI-изображения могут надежно создаваться по способу MUSE только когда число кадров равно четырем или меньше с помощью типичной 8-канальной головной катушки, но как алгоритм самонавигации, способ MUSE имеет несколько преимуществ перед способами, основанными на навигаторе (R1). Например, когда для более высокого пространственного разрешения или более низкого уровня геометрического искажения в 3T или 7T (R4) необходимо более четырех кадров, начальная реконструкция SENCE в MUSE может потерпеть неудачу и не обеспечить точную фазовую информацию. Дополнительно, типичная реконструкция SENCE с коэффициентом ускорения 8 обычно не будет давать в результате значимой фазовой информации для MUSE и может приводить к неудачной реконструкции MUSE. Это проиллюстрировано со ссылкой на фиг. 9A и 9B, причем на фиг. 9A показано изображение 900A, которое показывает модуль одного кадра из 8-кадровой реконструкции, основанной на SENSE, а на фиг. 9B показано изображение 900B, показывающее фазу одного кадра из 8-кадровой реконструкции SENCE. Качество изображения как модуля, так и фазы 8-кадровой реконструкции SENCE плохое. Поэтому реконструкция SENCE может рассматриваться как неудачная реконструкция.
Соответственно, варианты осуществления настоящей системы могут обеспечивать системы и способы, которые, среди прочего, могут преодолевать недостатки типичных систем.
Система(ы), устройство(а), способ(ы), интерфейс(ы) пользователя, компьютерная программа(ы), процессы и т.д. (здесь далее каждая из которых будет упоминаться как система, если контекст не указывает иное), описанные здесь, рассматривают проблемы, такие как артефакты изображения, и/или обеспечивают одну или более альтернатив системам предшествующего уровня техники.
В соответствии с вариантами осуществления настоящей системы, обеспечивается система магнитно-резонансной (МР) томографии (МРТ), которая может содержать по меньшей мере один контроллер. Этот по меньшей мере один контроллер может быть выполнен с возможностью: выполнения процесса захвата данных многокадрового изображения для захвата МР-информации для по меньшей мере одного набора многокадрового изображения, содержащего множество кадров изображения, каждый из которых содержит соответствующие данные, причем по меньшей мере часть МР-информации захватывают с использованием градиента магнитного поля, а по меньшей мере другую часть МР-информации захватывают без использования градиента магнитного поля; обучения ядра свертки, содержащего данные о по меньшей мере части МР-информации, полученной без использования градиента или с использованием процесса самообучения, причем ядро свертки содержит данные свертки; итеративной свертки МР-информации, полученной с использованием градиента магнитного поля для по меньшей мере двух из множества кадров изображений упомянутого по меньшей мере одного набора многокадрового изображения, обученным ядром свертки с формированием синтетических данных k-пространства для каждого соответствующего кадра из по меньшей мере двух кадров изображения множества кадров изображения; проецирования синтетических данных k-пространства для упомянутых по меньшей мере двух кадров изображения из множества кадров изображения упомянутого по меньшей мере одного набора многокадрового изображения в пространство изображения; и/или усреднения спроецированных синтетических данных k-пространства, которые спроецированы в пространство изображения, с формированием информации изображения.
Дополнительно предусмотрено, что упомянутый по меньшей мере один контроллер может хранить данные ядра свертки постоянными при выполнении итеративной свертки для соответствующего многокадрового набора. Дополнительно предусмотрено, что упомянутый по меньшей мере один контроллер может быть дополнительно выполнен с возможностью фиксировать данные ядра свертки так, чтобы сформировать согласованную корреляцию во время итеративной свертки для упомянутого по меньшей мере одного набора многокадрового изображения. Кроме того, в соответствии с вариантами осуществления настоящей системы, синтетические данные k-пространства могут формировать ряд наборов кадров (Ns) синтетических данных k-пространства. Также предусмотрено, что во время усреднения по меньшей мере один контроллер может быть выполнен с возможностью усреднения величин (модулей) синтетических данных k-пространства для упомянутых по меньшей мере двух кадров из множества кадров изображения.
В соответствии с вариантами осуществления настоящей системы МРТ-система может содержать дисплей и причем по меньшей мере один контроллер может быть выполнен с возможностью отображения сформированной информации изображения на дисплее.
В соответствии с дальнейшими вариантами осуществления настоящей системы обеспечивается способ реконструкции изображений, полученных системой магнитно-резонансной (МР) томографии (МРТ), имеющей по меньшей мере один контроллер. Способ может быть выполнен посредством по меньшей мере одного контроллера системы МР-томографии и может содержать одно или более действий: выполнения процесса захвата многокадрового изображения для захвата МР-информации для по меньшей мере одного набора многокадрового изображения, содержащего множество кадров изображения, каждый из которых содержит соответствующие данные, причем по меньшей мере часть МР-информации получена с использованием градиента магнитного поля, а по меньшей мере другая часть МР-информации получена без использования градиента магнитного поля; обучают ядро свертки, содержащее данные о по меньшей мере части МР-информации, полученной без использования градиента магнитного поля, причем ядро свертки содержит данные свертки; итеративно сворачивают МР-информацию, полученную с использованием градиента магнитного поля по меньшей мере для двух из множества кадров изображения по меньшей мере одного набора многокадрового изображения, с помощью обученного ядра свертки, с формированием синтетических данных k-пространства для каждого соответствующего кадра по меньшей мере из двух кадров изображения; проецируют синтетические данные k-пространства по меньшей мере для двух кадров из множества кадров изображения в пространство изображения; и усредняют спроецированные синтетические данные k-пространства, спроецированные в пространство изображения, с формированием информации изображения.
Предусмотрено, что способ может дополнительно содержать действие поддержания данных ядра свертки постоянными при выполнении итеративной свертки для соответствующего многокадрового набора. Дополнительно предусмотрено, что способ может содержать действие фиксации данных ядра свертки так, чтобы сформировать согласованную корреляцию во время итеративной свертки для по меньшей мере одного набора многокадрового изображения. В соответствии с вариантами осуществления настоящей системы синтетические данные k-пространства могут сформировать ряд наборов кадров (Ns) из синтетических данных k-пространства. Дополнительно предусмотрено, что действие усреднения может дополнительно содержать действие с величинами синтетических данных k-пространства для по меньшей мере двух кадров по меньшей мере одного набора многокадрового изображения. Также предусмотрено, что способ может содержать действие визуализации сформированной информации изображения на дисплее.
В соответствии с дополнительными вариантами осуществления настоящей системы обеспечивается компьютерная программа, хранящаяся на считываемом компьютером невременном носителе памяти. Компьютерная программа может быть выполнена с возможностью реконструкции изображения, полученного от системы магнитно-резонансной (МР) томографии, и может содержать часть программы, которая может выполняться с возможностью: выполнения захвата многокадрового изображения для захвата МР-информации для по меньшей мере одного набора многокадрового изображения, содержащего множество кадров изображения, каждый из которых содержит соответствующие данные, причем по меньшей мере часть МР-информации получена с использованием градиента магнитного поля, а по меньшей мере другая часть МР-информации получена без использования градиента магнитного поля; обучения ядра свертки, содержащего данные о по меньшей мере части МР-информации, полученной без использования градиента магнитного поля, причем ядро свертки содержит данные свертки; итеративной свертки МР-информации, полученной с использованием градиента магнитного поля для по меньшей мере двух из множества кадров изображения по меньшей мере одного набора многокадрового изображения, обученным ядром свертки с формированием синтетических данных k-пространства для каждого соответствующего кадра из по меньшей мере двух кадров изображения; проецирования синтетических данных k-пространства для по меньшей мере двух кадров изображения из множества кадров изображения по меньшей мере одного набора многокадрового изображения в пространство изображения; и усреднения спроецированных данных k-пространства, которые спроецированы в пространство изображения, с формированием информации изображения.
Предусмотрено, что при выполнении итеративной свертки для соответствующего многокадрового набора компьютерная программа может быть дополнительно выполнена с возможностью поддержания данных ядра свертки постоянными. Также предусмотрено, что часть программы может быть дополнительно выполнена с возможностью фиксации данных ядра свертки так, чтобы сформировать согласованную корреляцию во время итеративной свертки по меньшей мере для одного набора многокадрового изображения. Также предусмотрено, что во время усреднения часть программы дополнительно может быть выполнена с возможностью усреднения величин синтетических данных k-пространства для по меньшей мере двух кадров из по меньшей мере одного набора многокадрового изображения. В соответствии с некоторыми вариантами осуществления предусмотрено, что часть программы может быть дополнительно выполнена с возможностью визуализации сформированной информации изображения на дисплее.
В соответствии с другими вариантами осуществления настоящей системы, обеспечивается система магнитно-резонансной (МР) томографии (МРТ), которая может содержать по меньшей мере один контроллер, выполненный с возможностью: выполнения процесса захвата многокадрового изображения для захвата МР-информации для множества кадров изображения набора многокадрового изображения, где каждый из кадров изображения содержит соответствующие данные изображения; составления матрицы на основе данных изображения для каждого кадра изображения из набора многокадрового изображения; определения собственных значений и векторов для матрицы; определения наибольшего собственного значения среди собственных значений; и формирование составного изображения на основе объединенного изображения, соответствующего наибольшему собственному значению.
Дополнительно предусмотрено, что упомянутый по меньшей мере один контроллер может быть дополнительно выполнен с возможностью нормализации энергии составного изображения. Также предусмотрено, что упомянутый по меньшей мере один контроллер может быть выполнен с возможностью реконструкции МР-информации с формированием данных изображения для каждого соответствующего кадра изображения из множества кадров изображения по меньшей мере одного набора многокадрового изображения. В соответствии с дополнительными вариантами осуществления настоящей системы, обеспечивается система магнитно-резонансной (МР) томографии (МРТ), которая может содержать по меньшей мере один контроллер, который может быть выполнен для: выполнения захвата данных многокадрового изображения для захвата МР-информации для ряда сканирований (NEX) набора многокадрового изображения, имеющего ряд кадров (NS), причем каждый из кадров изображения содержит соответствующие данные изображения, с тем, чтобы захваченная МР-информация содержала информацию изображения для NS*NEX изображений; реконструирования информации изображения для NS*NEX изображений и целевого изображения посредством обработки информации изображения для NS*NEX изображений и целевого изображения в качестве наборов неизвестных и численного совместного решения наборов неизвестных; и/или визуализации реконструированного изображения.
Дополнительно предусматривают, что при выполнении реконструкции упомянутый по меньшей мере один контроллер может быть дополнительно выполнен с возможностью применения по меньшей мере одного из способа свертки и низкорангового способа для решения наборов неизвестных.
Далее изобретение объясняется более подробно и посредством примера со ссылкой на сопроводительные чертежи, на которых:
Фиг. 1 показывает вид сбоку в разрезе части магнитно-резонансной (МР) системы, функционирующей в соответствии с вариантами осуществления настоящей системы;
Фиг. 2 - блок-схема последовательности операций, которая иллюстрирует процесс, выполняемый магнитно-резонансной системой в соответствии с вариантами осуществления настоящей системы;
Фиг. 3A показывает МР-изображение, реконструированное без фазовой коррекции;
Фиг. 3B показывает МР-изображение, реконструированное с использованием усреднения PPI;
Фиг. 3C показывает МР-изображение, реконструированное в соответствии с вариантами осуществления настоящей системы;
Фиг. 4 - блок-схема последовательности операций, которая иллюстрирует процесс, выполняемый магнитно-резонансной системой в соответствии с вариантами осуществления настоящей системы;
Фиг. 5 - график, показывающий строки сканирования k-пространства многокадрового набора, захваченного в соответствии с вариантами осуществления настоящей системы;
Фиг. 6A показывает многокадровое DWI-изображение, реконструированное в соответствии со стандартными способами усреднения;
Фиг. 6B показывает многокадровое DWI-изображение, реконструированное с использованием способа объединения анализа собственных значений, функционирующего в соответствии с вариантами осуществления настоящей системы;
Фиг. 7A показывает 8-кадровое EPI DWI-изображение, реконструированное в соответствии со стандартным способом усреднения;
Фиг. 7B показывает 8-кадровое EPI DWI-изображение, реконструированное в соответствии с вариантами осуществления настоящей системы;
Фиг. 8A показывает 4-кадровое TSE-изображение печени, реконструированное в соответствии со стандартным способом усреднения;
Фиг. 8B показывает 4-кадровое TSE-изображение печени, реконструированное в соответствии с вариантами осуществления настоящей системы;
Фиг. 9A показывает изображение, показывающее модуль одного кадра 8-кадровой реконструкции на основе SENSE;
Фиг. 9B показывает изображение, показывающее фазу одного кадра 8-кадровой реконструкции на основе SENSE;
Фиг. 10 показывает блок-схему последовательности операций, которая иллюстрирует процесс, выполняемый магнитно-резонансной системой в соответствии с вариантами осуществления настоящей системы;
Фиг. 11 показывает карту FA, сформированную с использованием набора 4-кадровых данных при работе в соответствии с вариантами осуществления настоящей системы;
Фиг. 12 показывает карту FA, сформированную с использованием набора 8-кадровых данных при работе в соответствии с вариантами осуществления настоящей системы;
Фиг. 13 показывает карту, сформированную с использованием набора 8-кадровых данных при работе в соответствии с вариантами осуществления настоящей системы;
Фиг. 14 показывает карту, сформированную с использованием набора 12-кадровых данных при работе в соответствии с вариантами осуществления настоящей системы;
Фиг. 15 показывает блок-схему последовательности операций, которая иллюстрирует процесс, выполняемый магнитно-резонансной системой в соответствии с вариантами осуществления настоящей системы; и
Фиг. 16 показывает часть системы в соответствии с вариантами осуществления настоящей системы.
Ниже приводятся описания примерных вариантов осуществления, которые при их рассмотрении совместно с последующими чертежами будут демонстрировать указанные выше признаки и преимущества, а также дополнительные признаки и преимущества. В последующем описании для целей объяснения, но не ограничения, изложены иллюстративные подробности, такие как архитектура, интерфейсы, технологии, атрибуты элементов и т.д. Однако, специалистам в данной области будет очевидно, что другие варианты осуществления, которые отклоняются от этих подробностей, все ещё могут считаться попадающими в рамки прилагаемой формулы изобретения. Кроме того, с целью ясности, подробные описания общеизвестных устройств, схем, инструментов, технологий и способов опущены с тем, чтобы не затруднять понимание описания настоящей системы. Следует однозначно понимать, что чертежи включены для иллюстративных целей и не представляют весь объем настоящей системы. На сопроводительных чертежах подобные ссылочные позиции на различных чертежах могут обозначать подобные элементы. Термин и/или и его производные должны пониматься как означающие, что только один или более из перечисленных элементов могут необходимо должным образом присутствовать в системе (например, присутствует только один перечисленный элемент, могут присутствовать два из перечисленных элементов и т.д., вплоть до присутствия всех перечисленных элементов) в соответствии с перечислением пунктов формулы изобретения и в соответствии с одним или более вариантами осуществления настоящей системы.
На фиг. 1 показан вид сбоку в разрезе части магнитно-резонансной (МР) системы 100 (здесь далее с целью ясности - система 100), функционирующей в соответствии с вариантами осуществления настоящей системы. Система 100 может содержать один или более из контроллера 110, памяти (запоминающего устройства), дисплея, корпуса 102, основного магнита 104, градиентных катушек 106 и радиочастотного (РЧ) блока 120. Может обеспечиваться опора 140 для пациента для поддержания объекта интереса (OOI), такого как пациент 101 (здесь далее с целью ясности - пациент), и/или для размещения пациента 101 в необходимом положении и/или с необходимой ориентацией относительно корпуса 102, например, под управлением контроллера 110.
Корпус 102 может содержать по меньшей мере одну полость 108 и основной канал 112, расположенные между противоположными концами 114. Основной канал 112 может быть расположен между противоположными проходами 115 корпуса 102 и может быть выполнен с возможностью приема пациента 101 через один из противоположных проходов 115. По меньшей мере одна полость 108 может быть выполнена с возможностью приема одного или более из основного магнита 104, градиентных катушек 106 и по меньшей мере части РЧ-блока 120. Корпус 102 может дополнительно содержать механизм охлаждения (например, криогенную систему охлаждения и т.д.), выполненный с возможностью охлаждения, при необходимости, частей системы 100, таких как основной магнит 104.
Контроллер 110 может управлять всем функционированием системы 100 и может содержать одно или более логических устройств, таких как процессоры (например, микропроцессоры и т.д.) и т.д. Контроллер 110 может содержать одно или более из контроллера основного магнита, контроллера градиентов, РЧ-контроллера и реконструктора. Контроллер основного магнита может управлять функционированием основного магнита 104. Контроллер градиентов может управлять функционированием градиентных катушек 106. РЧ-контроллер может управлять функционированием РЧ-блока 120. Реконструктор может функционировать для реконструкции информации изображения на основе МР-информации, полученной в соответствии с вариантами осуществления настоящей системы. Соответственно, реконструктор может реконструировать информацию изображения на основе многокадровой информации. Реконструированная информация изображения может, например, быть дополнительно обработана, сохранена в запоминающем устройстве системы для последующего использования и/или визуализирована на дисплее системы для удобства пользователя.
Контроллер 110 может дополнительно определить или как-либо иначе получить последовательности сканирования, параметры сканирования и т.д. от пользователя и/или из запоминающего устройства и применить их во время процедуры сканирования. Например, контроллер 110 может получить последовательность сканирования, такую как многокадровая последовательность сканирования, от запоминающего устройства и, например, управлять одним или более из основного магнита 104, градиентных катушек 106 и/или РЧ-блока 120 в соответствии с последовательностью сканирования для получения, например, требуемой информации о магнитном резонансе, такой как информация отраженного сигнала. Контроллер 110 и/или его части могут осуществлять связь с одним или более из запоминающего устройства, дисплея, основного магнита 104, градиентных катушек 106, РЧ-блока 120 и т.д. посредством любого подходящего способа, такого как посредством проводных и/или беспроводных способов связи, посредством одной или более сетей (например, глобальной сети (WAN), локальной сети (LAN), Интернета, шины собственной связи, сети контроллеров (CAN), телефонной сети и т.д.).
Основной магнит 104 может иметь канал 113 и может быть выполнен с возможностью формирования основного магнитного поля (например, поля В0) внутри основного канала 112. Основное магнитное поле по существу может быть однородным внутри объема сканирования основного канала 112. Основной магнит 104 может содержать один или более основных магнитов, каждый из которых выполнен с возможность формирования по меньшей мере части основного магнитного поля. Основной магнит 104 может быть круговым (например, кольцевым) магнитом, плоским магнитом, разрезанным магнитом, открытым магнитом, полуокружным (например, C-образным) магнитом и т.д. Основной магнит 104 или его части могут быть выполнены из любого подходящего материала, такого как сверхпроводящий материал, и/или могут функционировать под управлением контроллера 110.
Градиентные катушки 106 могут содержать одну или более градиентных катушек (например, x-, y- и z-градиентные катушки), которые могут создавать одно или более градиентных полей вдоль одной или более соответствующих осей под управлением контроллера 110. РЧ-блок 120 может содержать одну или более передающих РЧ-катушек, выполненных с возможностью передачи РЧ-импульсов возбуждения и/или приема (например, индуцированных) МР-сигналов (например, информации отраженных сигналов) под управлением контроллера 110. Например, в некоторых вариантах осуществления РЧ-блок 120 может содержать матрицу преобразователей из передающих и/или приемных катушек. РЧ-блок 120 может быть расположен внутри основного канала 112 корпуса 102 и может размещаться в желаемом положении и/или с желаемой ориентацией, такой как под опорой 140 для пациента, для получения изображений желаемого объема сканирования внутри основного канала 112. РЧ-блок 120 может содержать РЧ-катушки проводного и/или беспроводного типа.
В качестве примера, ниже обсуждаются несколько способов выполнения многокадровых захватов и реконструкции изображения в соответствии с вариантами осуществления настоящей системы. Эти способы известны как: способ обеспечения корреляции, способ построения изображения с использованием анализа собственных значений и низкоранговый способ. Один или более из этих способов или их части могут быть использованы самостоятельно в соответствии с вариантами осуществления настоящей системы, или два или более могут использоваться в сочетании друг с другом. Каждый из этих способов может обеспечивать корреляцию данных между кадрами изображения набора многокадрового изображения и может формировать конечную реконструкцию из наборов синтетических данных k-пространства. В соответствии с вариантами осуществления настоящей системы реконструкция изображения может быть выполнена с использованием набора данных k-пространства, который может быть сформирован набором многокадрового изображения. Соответственно, каждый кадр из набора многокадрового изображения может содержать поднабор k-пространства.
Способ обеспечения корреляции
Способ обеспечения корреляции, функционирующий в соответствии с вариантами осуществления настоящей системы, обсуждается со ссылкой на фиг. 2, которая показывает блок-схему последовательности операций, иллюстрирующую процесс 200, выполняемый магнитно-резонансной системой в соответствии с вариантами осуществления настоящей системы. Процесс 200 может выполняться с использованием одного или более компьютеров, осуществляющих связь по сети, и может получать информацию и/или сохранять информацию в одном или более запоминающих устройствах, которые могут быть локальными и/или удаленными друг от друга. Процесс 200 и другие процессы, представленные здесь в соответствии с вариантами осуществления настоящей системы, могут содержать один или более следующих действий. Дополнительно, при необходимости, одно или более из этих действий могут объединяться и/или разделяться на поддействия. Дополнительно, одно или более из этих действий, в зависимости от настроек, могут быть пропущены. Информация изображения может содержать, например, информацию изображения, захваченную из последовательности многокадрового изображения. При функционировании процесс 200 может начинаться действием 201 и затем перейти к действию 203.
Во время действия 203 процесс может выполнить процесс многокадрового захвата для захвата МР-информации (например, информации отраженного сигнала, аналоговой МР-информации и т.д.) для по меньшей мере одного многокадрового набора, содержащего множество кадров. Процесс многокадрового захвата может выполняться в соответствии с многокадровой последовательностью, такой как последовательность сканирования ms-EPI диффузно взвешенного отображения (DWI). В соответствии с некоторыми вариантами осуществления, ms-EPI-сканирование может иметь тип с чередующимися и/или считываемыми направлениями. Процесс многокадрового захвата может дополнительно выполняться с использованием любого подходящего способа многокадрового захвата данных, такого как способ турбо-спин-эхо (TSE), многокадрового спирального, PROPELLOR и/или ms-эхо- планарного отображения (ms-EPI).
Что касается по меньшей мере одного многокадрового набора, то этот набор может содержать множество кадров, каждый из которых может содержать соответствующую МР-информацию, которая может формировать по меньшей мере часть данных k-пространства для соответствующего кадра. Например, предполагая, что полное k-пространство имеет 256 строк k-пространства и что каждый кадр может содержать 64 строки, то тогда процесс может потребовать (256 строк)/(64 строки/кадр)= 4 кадра во время заданного захвата данных с формированием полного набора многокадрового изображения k-пространства. Соответственно, 4 кадра могут использоваться для заполнения строк k-пространства, хотя можно также предусмотреть другое число кадров, такое как кратное 4 кадрам, например, 8 кадров.
Дополнительно, число кадров (NS) может устанавливаться равным числу сканирований (NEX), которое может быть целым числом больше единицы и может устанавливаться системой и/или пользователем. Однако, в других вариантах осуществления NEX может быть целым числом, которое может отличаться от NS. Каждое число сканирований (NEX) может соответствовать полному набору многокадрового изображения k-пространства с числом кадров, равным NS (например, 4 кадра, как иллюстративно обсуждено здесь). Таким образом, предполагая, что многокадровый набор содержит данные k-пространства из L строк сканирования k-пространства (например, см. фиг. 5), то тогда каждая из этих L строк будет сканироваться NEX раз и соответствующая МР-информация будет захватываться и назначаться соответствующему кадру соответствующего многокадрового набора. Может быть захвачено NEX многокадровых наборов. Соответственно, каждый набор изображения k-пространства может сканироваться NEX раз. Таким образом, каждая из L строк k-пространства может рассматриваться как сканированная NEX раз. Например, предполагая, что NS равно трем, то тогда для данного захвата могут быть кадры с первого по третий. Первый кадр может содержать МР-информацию для первого из NS захватов для каждой из L строк k-пространства; второй кадр может содержать МР-информацию для второго из NS захватов для каждой из L строк k-пространства и третий кадр может содержать МР-информацию для третьего из NS захватов для каждой из L строк k-пространства. Этот процесс может быть объяснен дополнительно со ссылкой на фиг. 5 и соответствующий текст. В соответствии с вариантами осуществления настоящей системы, процесс, при необходимости, может получить множество (например, где множество может равняться NEX) многокадровых наборов.
Дополнительно, данные k-пространства могут содержать МР-данные, такие как МР-данные b=0, которые могут содержать МР-информацию, полученную без использования градиента магнитного поля (и которые могут быть известны как b=0 (k-пространство, содержащее b=0 и b>0, может быть составлено многочисленными кадрами)), и МР-данные b>0, которые содержат МР-информацию, полученную с использованием градиента магнитного поля. Таким образом, данные b=0 могут соответствовать по меньшей мере одному многокадровому набору, который был захвачен без использования градиента магнитного поля (например, информации МР-изображения для изображения без градиента магнитного поля (например, b=0)), и данные b>0 могут соответствовать по меньшей мере одному многокадровому набору, который был получен с использованием градиента магнитного поля (например, информации МР-изображения для изображения с использованием градиента магнитного поля (например, b>0)) в соответствии с вариантами осуществления настоящей системы. В соответствии с вариантами осуществления настоящей системы значения b могут быть в диапазоне от 0 до b, где b, например, может равняться 800. Однако, в соответствии с другими вариантами осуществления, b может иметь другие значения. В соответствии с вариантами осуществления данные k-пространства могут соответствовать МР-информации отраженного сигнала. Например, в некоторых вариантах осуществления процесс может различать информацию, соответствующую b=0 (например, информация b=0, такая как b=0 кадров), и информацию, соответствующую b>0 (например, информация b>0). Градиент может использоваться для диффузно взвешенного отображения (DWI). Для обнаружения диффузии, которая может быть связана с направлением, градиент магнитного поля может быть приложен вдоль определенного направления в МР.
Процесс может дополнительно получать от пользователя и/или от запоминающего устройства системы информацию инициализации. Информация инициализации может содержать такую информацию, как последовательность сканирования, число L строк k-пространства для сканирования, значение b, значение NS и значение NEX. Например, в соответствии с некоторыми вариантами осуществления NS может быть установлено равным 2, NEX может быть установлено как целое число, равное или больше 1, и B может быть установлено равным 800, как иллюстративно обсуждено ниже.
После завершения действия 203 процесс может перейти к действию 205, где процесс может получить ядро свертки для коррекции данных. Ядро свертки может быть получено от запоминающего устройства системы и/или, при необходимости, может быть сформировано процессом. Ядро свертки может сформировать компактную матрицу и, в соответствии с некоторыми вариантами осуществления, может не использовать захваченный сигнал от того же самого кадра (например, k-пространства b=0 в настоящем варианте осуществления). Например, ядро свертки может содержать матрицу NxM, где N представляет число строк и М представляет число столбцов и, при необходимости, могут быть заданными параметрами. Например, в соответствии с некоторыми вариантами осуществления, ядро свертки может быть матрицей 5×5. Однако, предполагаются также и другие значения. Дополнительно, либо k-пространство для b=0, либо текущее изображение, которое должно быть реконструировано, могут использоваться процессами для вычисления ядра свертки. Кроме того, любая подходящая схема аппроксимации данных, такая как которая была раскрыто в R7, может использоваться вариантами осуществления настоящей системы для вычисления ядра. После завершения действия 205 процесс может перейти к действию 207.
Во время действия 207 процесс может обучать ядро свертки на обучающей информации, такой как информация b=0 (например, МР-данные, захваченные без использования градиента магнитного поля), или других внешних данных, которые могут быть необходимы. Однако, в других вариантах осуществления ядро свертки может быть самообучающимся. Однако, в соответствии с некоторыми вариантами осуществления настоящей системы и как обсуждалось выше, ядро свертки не должно содержать информацию МР-изображения из того же самого кадра (например, кадра, который обучен). Таким образом, ядро свертки может обучаться в соответствии с дополнительными данными, такими как данные b=0 в DWI. Это показано со ссылкой на приведенное ниже уравнение (1), которое демонстрирует схему вычисления свертки и ядра в соответствии с вариантами осуществления настоящей системы.
Где J - число соседних сигналов k-пространства, используемых в линейной комбинации, L - число элементов катушки, 










Во время действия 209 процесс может выполнять математический процесс свертки для итеративной свертки МР-информации, полученной с использованием градиента магнитного поля (например, информацию МР-изображения b>0), обученным ядром свертки с формированием ряда наборов кадров (Ns, ряд кадров) синтетических данных k-пространства. Таким образом, процесс может итеративно свертывать данные k-пространства b>0 с помощью обученного ядра свертки для каждого из множества (например, NS) кадров многокадрового набора. Более конкретно, для каждого кадра из множества кадров (например, NS) многокадрового набора, набор синтетических данных k-пространства может быть сформирован при обеспечении согласования данных соответствующего кадра во время итеративной свертки, которая может гарантировать покадровую точность. Во время каждой итерации данные соответствующего кадра фиксируются, чтобы быть постоянными. При сохранении каждого кадра из многокадрового набора постоянным (например, посредством свертки с обученным ядром корреляции), каждый кадр будет приводить в результате к набору синтетических данных k-пространства. Процесс может повторяться для каждого из NEX сканирований каждой из NS строк синтетических данных k-пространства. Следовательно, процесс может формировать наборы Ns×NEX синтетических данных k-пространства. После завершения действия 209 процесс может перейти к действию 211.
Во время действия 211 процесс может формировать информацию реконструированного изображения, проецируя каждый из наборов Ns×NEX (или выборочных Ns×NEX наборов) синтетических данных k-пространства в пространство изображения с формированием соответствующей информации реконструированного изображения. Процесс может затем определить "средние значения" информации изображения с пространственно адаптированными весами или без них, которые могут быть установлены системой и/или пользователем. Процесс может определять "средние значения" во время каждой итерации свертки во время действия 209 и может прменять любой подходящий способ, такой как способ анализа типа SVD, как обсуждалось здесь, или другие схемы усреднения, которые могут быть должным образом применимы. Вычисление вышеупомянутого "среднего значения" может применять другой подходящий способ или способы усреднения, такие как анализ с сингулярной декомпозицией значения (SVD) или низкоранговый способ. После завершения действия 211 процесс может перейти к действию 213.
Во время действия 213 процесс может визуализировать реконструированную информацию изображения на дисплее системы с тем, чтобы пользователь мог просматривать изображения, полученные с помощью вариантов осуществления настоящей системы. Дополнительно, процесс может дополнительно обеспечивать интерфейс пользователя (UI), с которым пользователь может взаимодействовать, чтобы изменять параметры просмотра, вводить информацию (например, замечания, команды, выборы и т.д.) и т.д. В соответствии с вариантами осуществления настоящей системы один или более из захвата изображения, обработки и визуализации, при необходимости, могут происходить в режиме реального времени или могут иметь задержку. После завершения действия 213 процесс может перейти к действию 215.
Во время действия 215 процесс может сохранять информацию, сформированную процессом, такую как информацию МР-изображения, синтетическую информацию k-пространства, информацию реконструкции и т.д. (которая может быть необходима), в запоминающем устройстве системы для последующего использования. Как можно легко понять, в любой момент во время и/или после процесса 200 информация может сохраняться для последующей визуализации и/или обработки. После завершения действия 215 процесс может перейти к действию 217, на котором процесс может закончиться.
В соответствии с вариантами осуществления настоящей системы вышеописанный процесс обеспечивает согласование корреляции данных и покадровое согласование данных в собранных многокадровых МР-данных.
Могут быть захвачены любые подходящие многокадровые МР-данные, такие как ms-EPI DWI и т.п. В соответствии с вариантами осуществления настоящей системы, если нет никакого фазового сдвига из-за межкадрового движения, корреляции данных для данных b>0 должна быть такой же, как для данных b=0. При осуществлении корреляции данных, обученной на данных b=0, фазовый сдвиг может быть итеративно удален.
Таким образом, процесс 200 может содержать действия:
(1) Действие итеративного обеспечения, которое итеративно обеспечивает корреляцию данных среди каналов. Свертка в k-пространство может использоваться для обеспечения корреляции. После свертки может быть сформировано синтетическое k-пространство. Корреляция может обучаться с использованием дополнительных данных (например, данных b=0 в DWI) или может быть самообучаемой, и
(2) Действие обеспечения покадрового согласования данных, где для каждого кадра может формироваться синтетическое k-пространство при обеспечении согласования данных соответствующего кадра во время итерации, например, приводящее в результате к ряду наборов кадров синтетического k-пространства. Другими словами, варианты осуществления настоящей системы могут применять покадровое согласование данных.
При сравнении с ранее обсуждавшимся способом COCOA было замечено, что, хотя COCOA также использует способы корреляции данных, он не выполняет и не зависит от итеративного обеспечения, выполняемого с помощью вариантов осуществления настоящей системы. Дополнительно, способ COCOA не применяет обеспечение покадрового согласования данных.
Результаты испытаний
Выборочную информацию МР-изображения получали с использованием способов ms-EPI DWI, функционирующих на катушке Philips™ 3T в соответствии с вариантами осуществления настоящей системы. Информация МР-изображения имеет разрешение 1 мм×1 мм×4 мм при 4-х чередующихся EPI-кадрах. b=800 и NS=2 показано на фиг. 3A-3C. Более конкретно, на фиг. 3A показано МР-изображение, реконструированное без фазовой коррекции; на фиг. 3B показано МР-изображение, реконструированное с использованием среднего значения PPI (например, среднего значения SENCE); и на фиг. 3C показано МР-изображение, реконструированное в соответствии с вариантами осуществления настоящей системы. Можно видеть, что реконструкция изображения, выполненная в соответствии с вариантами осуществления настоящей системы (например, изображение 3C), имеет явно лучшее SNR, чем изображение на фиг. 3B, реконструированное с использованием стандартного способа, использующего среднее значение SENCE.
Таким образом, варианты осуществления настоящей системы могут обеспечить способы уменьшения артефактов из-за межкадрового движения при многокадровых захватах. Дополнительно предусмотрено, что варианты осуществления настоящей системы могут использоваться для пространственного разрешения в многокадровых способах EPI-, DWI- и TSE-томографии.
Способ составления изображения посредством анализа собственных значений
Способ составления изображения посредством анализа собственных значений, функционирующий в соответствии с вариантами осуществления настоящей системы, обсуждается здесь ниже со ссылкой на фиг. 4, которая является блок-схемой последовательности операций, иллюстрирующей процесс 400, выполняемый магнитно-резонансной системой в соответствии с вариантами осуществления настоящей системы. Информация изображения может содержать, например, информацию изображения, захваченную из многокадровой последовательности изображений. При функционировании процесс может начинаться во время действия 401 и затем переходить к действию 403.
Во время действия 403 процесс может выполнять процесс многокадрового захвата изображения для захвата данных МР-изображения (например, информации отраженного сигнала, аналоговой МР-информации и т.д.) для многокадровой последовательности изображений (такой как последовательность сканирования ms-EPI диффузионно взвешенного изображения (DWI)), имеющего множество кадров. Таким образом, каждая многокадровая последовательность изображений может формировать набор кадров, содержащий множество соответствующих кадров (например, NS кадров, где NS - целое число >1). Дополнительно, могут быть получены один или более наборов кадров. Однако, в настоящих вариантах осуществления для ясности обсуждается только одиночный набор кадров.
Во время захвата изображения каждое k-пространство может быть заполнено множеством кадров, формирующих набор кадров. Таким образом, все k-пространство может соответствовать одному МР-изображению и может быть составлено из NS кадров. Каждый набор кадров (например, ms-набор) может содержать NS кадров и может сканироваться NEX раз. Таким образом, можно предположить, что процесс может захватить ряд (например, NEX) одинаковых изображений. В соответствии с вариантами осуществления настоящей системы, это может обеспечить лучший SNR и/или уровень артефакта движения, чем стандартные способы реконструкции изображения.
Дополнительно, процесс может получать информацию инициализации от пользователя и/или от запоминающего устройства системы. Информация инициализации может содержать такую информацию, как последовательность сканирования, число строк сканирования k-пространства и значения NS и NEX. Например, в соответствии с некоторыми вариантами осуществления, NS может быть установлено равным 3 и NEX может быть установлено равным 2. После завершения действия 403 процесс может перейти к действию 405.
Во время действия 405 процесс может реконструировать множество изображений на основе полученных данных МР-изображения для набора кадров. Таким образом, процесс может реконструировать изображение для каждого кадра многокадрового набора, где число кадров в многокадровом наборе может быть равным NS. Предполагая, что каждый набор кадров изображения содержит NS кадров, процесс может реконструировать NS*NEX изображений (где для ясности предполагается, что NEX=1, так что может быть захвачено NS*(1) кадров изображения), каждое из которых теоретически должно быть одним и тем же и, таким образом, для настоящего описания может предполагаться, что оно является "одним и тем же". Однако, из-за движения и/или шума один или более кадров могут отличаться от одного или более других кадров.
На фиг. 5 представлен график 500, показывающий строки сканирования k-пространства многокадрового набора, захваченного в соответствии с вариантами осуществления настоящей системы. На графике 500 NS может предполагаться равным трем, а число строк сканирования равным L. Таким образом, для каждой строки 506(l) сканирования (где l находится в диапазоне от 1 до L) могут иметься строки 502(1)-502(3) NS кадров, каждая из которых соответствует кадру из многокадрового набора. Дополнительно, когда данные, соответствующие каждому из этих кадров, реконструируются, соответствующее изображение может быть сформировано таким, как показано на изображениях 504-1-504-3 (в целом, 504-x). Таким образом, каждое из изображений 504-x может теоретически рассматриваться как одно и то же изображение. Однако, реконструированное многокадровое изображение 508 может соответствовать информации от каждого из кадров многокадрового набора (или, при необходимости, выборочных кадров или частей многокадрового набора). Хотя на фиг. 5 показан линейный многокадровый набор, варианты осуществления настоящей системы могут также быть согласованы с вращательными сканированиями (радиальная траектория) и т.д. После завершения действия 405 процесс может перейти к действию 407.
Во время действия 407 в процессе может быть составлена матрица, основанная на изображениях каждого из кадров многокадрового набора. Более конкретно, процесс может использовать каждое изображение (например, 504x) многокадрового набора в качестве вектора, чтобы составить матрицу, которая может представлять соответствующее изображение. Соответственно, процесс может сформировать множество матриц, каждая из которых может представлять соответствующее изображение. Процесс может сохранять матрицу для каждого изображения в запоминающем устройстве системы для последующего использования. Дополнительно, процесс может повторно изменять форму одной или более из этих матриц, например, с образованием вектора, имеющего требуемую длину. Таким образом, соответствующий вектор может представлять столбец матрицы многочисленных изображений. После завершения действия 407 процесс может перейти к действию 409.
Во время действия 409 процесс может формировать собственные значения и соответствующие собственные векторы для матрицы. Соответственно, процесс может, например, применяться к матрице анализ SVD, чтобы формировать каждое из собственных значений и собственных векторов. Таким образом, результаты SVD-анализа могут обеспечивать собственные значения и соответствующие собственные векторы. Процесс может определить собственные значения с использованием подходящего способа анализа собственных значений для извлечения общих признаков среди каждого изображения (кадра) набора многокадрового изображения. Например, основанный на анализе собственных значений способ, функционирующий в соответствии с вариантами осуществления настоящей системы, может быть использован для адаптивного (с локальными весами) объединения фазированных МР-изображений матрицы с целью достижения оптимального SNR. Этот способ, когда он функционирует в соответствии с вариантами осуществления настоящей системы, может обеспечить оптимальное SNR без знания информации о чувствительности катушек. Этот способ может упоминаться как модифицированный способ ACC. Дополнительно, анализ собственных значений дополнительно обсуждается в R6 и может должным образом применяться в соответствии с вариантами осуществления настоящей системы. Для каждого из (исходных) изображений (например, исходных изображений, сформированных во время действия 405), элементы каждого собственного вектора (например, соответствующего изображения) могут использоваться в качестве весов каждого из этих (исходных) изображений с формированием взвешенного суммирования этих изображений. Это взвешенное суммирование можно быть названо составным изображением (например, см. ниже действие 413), которое является суммированным или объединенным изображением. Кроме того, в соответствии с вариантами осуществления настоящей системы, выполняемый SVD-анализ может считаться глобальным анализом. После завершения действия 409 процесс может перейти к действию 411.
Во время действия 411 процесс может определить наибольшее собственное значение из числа собственных значений, определенных во время действия 409. Процесс может дополнительно определить собственный вектор, соответствующий наибольшему собственному значению. Таким образом, для определенного наибольшего собственного значения процесс может выбрать его соответствующий собственный вектор. Соответственно, процесс может, например, анализировать по меньшей мере часть результатов SVD-анализа (например, собственные значения) и определить наибольшее собственное значение. После завершения действия 411 процесс может перейти к действию 413.
Во время действия 413 процесс может сформировать составное изображение на основе объединенной (составной) информации изображения, соответствующей ранее определенному наибольшему собственному значению, в качестве составного изображения. Таким образом, объединенное изображение, соответствующее наибольшему собственному значению, может использоваться в качестве составного изображения. Формирование составного изображения иллюстративно дополнительно обсуждается выше со ссылкой на действие 409, которое может подходящим образом быть применено здесь согласно вариантам осуществления настоящей системы. Составное изображение может быть объединенным изображением, соответствующим определенному наибольшему собственному значению. В соответствии с вариантами осуществления настоящей системы, это изображение может иметь значительно более низкий шум и/или уровень артефактов, чем изображения, полученные с использованием стандартных способов усреднения. После завершения действия 413 процесс может перейти к действию 415.
Во время действия 415 процесс может нормализовать энергию составного изображения с использованием подходящего способа нормализации. Например, процесс может использовать способ нормализации, который может определить норму L2 составного изображения (например, информацию составного изображения, соответствующую составному изображению), и составное изображение делит норму L2 на себя и умножает норму L2 одного из исходных изображений, таких как первое изображение из набора изображений, или среднее значение нормы L2 всех исходных изображений. После завершения действия 415 процесс может перейти к действию 417.
Во время действия 417 процесс может отображать нормализованную информацию составного изображения на дисплее системы для удобства пользователя. Дополнительно, процесс может также обеспечивать интерфейс пользователя (UI), с которым пользователь может взаимодействовать, чтобы изменять параметры просмотра, вводить информацию (например, замечания, команды, выборы и т.д.) и т.д. В соответствии с вариантами осуществления настоящей системы одно или более из захвата изображения, обработка и визуализации, могут происходить в режиме реального времени или могут иметь задержку, как, например, через запоминающее устройство изображения (например, см. действие 419), и, при необходимости, последующую обработку. После завершения действия 417 процесс может переходить к действию 419.
Во время действия 419 процесс может сохранять информацию, сформированную процессом, такую как информация МР-изображения, сформированное объединенное изображение и т.д., в запоминающем устройстве системы для последующего использования. Как можно легко понять, в любой момент во время и/или после процесса 400 информация может сохраняться для последующей визуализации и/или обработки. После завершения действия 419 процесс может перейти к действию 421, на котором процесс может быть закончен.
Результаты испытаний
Результаты двух испытаний процесса 400 в соответствии с вариантами осуществления настоящей системы обсуждаются ниже, как результаты первого и второго испытаний.
При первом испытании многокадровое DWI-изображение захватывали с NS=4. Затем захваченное DWI-изображение реконструировали, как показано на фиг. 6A, которая представляет многокадровое DWI-изображение, реконструированное в соответствии со стандартными способами усреднения; и реконструированное, как показано на фиг. 6В, которая представляет многокадровое DWI-изображение, реконструированное с использованием способа объединения на основе анализа собственных значений, функционирующего в соответствии с вариантами осуществления настоящей системы. Сравнение результатов по фиг. 6A и 6B показывает, что варианты осуществления настоящей системы могут давать в результате более высокое отношение контраст/шум (CNR), чем стандартные способы.
Второе испытание показывает, что варианты осуществления настоящей системы могут обеспечивать изображения с более низким уровнем артефактов, чем можно получить с использованием стандартного способа усреднения, когда поднабор этих изображений содержит артефакты. Использовали два набора данных. Один набор данных соответствует 8-кадровому изображению EPI DWI; другой набор соответствует 4-кадровому TSE-изображению печени. В обоих этих наборах данных одиночное изображение формировали с помощью одиночного кадра. Эти изображения показаны ниже на фиг. 7A-7B и 8A-8B, где на фиг. 7A показано 8-кадровое изображение EPI DWI, реконструированное в соответствии со стандартным способом усреднения; и на фиг. 7B показано 8-кадровое изображение EPI DWI, реконструированное в соответствии с вариантами осуществления настоящей системы. На фиг. 8A показано 4-кадровое TSE-изображение печени, реконструированное в соответствии со стандартным способом усреднения; и на фиг. 8B показано 4-кадровое TSE-изображение печени, реконструированное в соответствии с вариантами осуществления настоящей системы. На фиг. 7A и 7B использовали один и тот же 8-кадровый набор данных изображения EPI DWI, и полученные в результате изображения 700A и 700B являются объединенными изображениями всех кадров в наборе данных. Точно также, на фиг. 8A и 8B использовали тот же самый 4-кадровый набор данных TSE, и полученные в результате изображения 800A и 800B являются объединенными изображениями всех кадров в наборе данных. Относительно фиг. 8A, стрелки 810 показывают места расположения артефактов.
Таким образом, варианты осуществления настоящей системы могут формировать набор изображений (например, с NS>1), который теоретически должен быть одним и тем же. Однако, по различным причинам во время захвата данных, таким как шум и т.д., одно или более изображений могут незначительно отличаться. Тогда процесс может использовать способ анализа собственных значений, функционирующий в соответствии с вариантами осуществления настоящей системы для извлечения общих признаков из набора изображений многокадрового набора. Затем объединенное изображение, соответствующее наибольшему собственному значению, может быть выбрано в качестве составного изображения, причем это последнее изображение может быть визуализировано на дисплее системы для удобства пользователя и/или сохранено в запоминающем устройстве системы для последующего использования, такого как обработка и т.д. Этот способ может дать в результате значительно более низкий шум и/или уровни артефактов, чем стандартные способы, основанные на усреднении.
Низкоранговый способ
В соответствии с другими вариантами осуществления настоящей системы обеспечивается алгоритм реконструкции самонавигации для ms-EPI, который устойчиво работает, даже когда число кадров возрастает (например, для большого числа кадров), например, до 18 кадров. Однако предполагаются также другие значения и/или диапазоны значений. Как обсуждалось выше, стандартные способы MUSE могут переставать работать, когда число кадров больше 4. Это поясняется при сравнении фиг. 9A и 9B, где на фиг. 9A показана основанная на SENSE однокадровая реконструкция 900A; и на фиг. 9B показан пример основанной на SENSE 8-кадровой реконструкции, в которой присутствуют явно видимые артефакты.
На фиг. 10 представлена блок-схема последовательности операций, которая иллюстрирует процесс 1000, выполняемый магнитно-резонансной системой в соответствии с вариантами осуществления настоящей системы. При функционировании процесс может быть начат во время действия 1001 и затем перейти к действию 1003.
Во время действия 1003 процесс может выполнять процесс захвата многокадрового изображения для захвата данных МР-изображения (например, информации отраженного сигнала, аналоговой МР-информации и т.д.) для многокадровой последовательности (например, многокадрового набора), содержащей ряд кадров. Захват может выполняться с использованием любого подходящего способа отображения, такого как многокадровые способы EPI, DWI и/или TSE с высоким пространственным разрешением. После завершения действия 1003 процесс может перейти к действию 1005. Для этой цели может использоваться, например, второй член в уравнении 2. Соответственно, согласно вариантам осуществления настоящей системы, более высокий ранг будет давать в результате более высокую общую энергию в уравнении 2. Однако, в соответствии с вариантами осуществления настоящей системы, чтобы минимизировать энергию, ранг реконструированных изображений может отбрасываться.
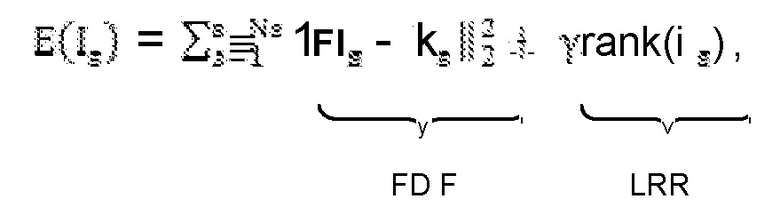
Во время действия 1005 процесс может обеспечивать низкий ранг набора изображений из числа многочисленных кадров и/или из числа усредненных значений сигналов (R3). Это низкоранговое обеспечение может быть применимо к комплексным данным или к величине (модулю) и фазе отдельно. В соответствии с вариантами осуществления настоящей системы, многокадровое отображение может обрабатываться как ускоренное динамическое отображение. Каждый одиночный кадр может соответствовать одному статическому изображению из многокадрового набора и может рассматриваться для формирования динамического набора изображений. Следовательно, коэффициент ускорения динамического набора изображений равен числу кадров в многокадровом наборе. Уникальным свойством этого динамического набора изображений является то, что изображение для каждого соответствующего кадра из набора многокадрового изображения теоретически должно быть одним и тем же, если нет никакого движения. Таким образом, если в кадрах изображения набора многокадрового изображения не будет никакого существенного непрерывного движения, можно ожидать, что эти изображения должны быть затем практически подобны друг другу и ранг многокадрового набора должен быть низким, как будет обсуждаться ниже в отношении приведенного далее уравнения 2. Соответственно, варианты осуществления настоящей системы могут применять свойство низкого ранга для решения проблемы ускоренного динамического отображения в соответствии с вариантами осуществления настоящей системы. Математическая модель предложенного низкорангового способа может быть выражена как:
 ...Ур. (2)
...Ур. (2)
где s - значение отсчета кадров (например, индекс кадра); Is - изображение кадра с отсчетом s; F - оператор кодирования; ks - захваченные данные (k-пространство для текущего кадра) для кадра s; F - преобразование Фурье; rank(*) - оператор вычисления ранга, ранг - математическая мера для описания линейной зависимости векторов в матрице, которая является целым числом, большим или равным 1 и меньшим или равным размеру матрицы (например, по соглашению); γ - неотрицательный параметр для уравновешивания первого и второго членов уравнения, которые могут быть соответственно известны как первый член точности данных (FDF) и член низкорангового упорядочивания (LRR), соответственно, как показано, и которые будут дополнительно обсуждаться ниже. Примерное значение γ может равняться 1. Большее значение γ может подчеркивать низкий ранг, а реконструированное изображение может иметь высокое отношение "сигнал-шум" (SNR), но более высокий уровень артефакта. Меньшее значение γ подчеркивает, что член точности больше, а реконструированное изображение может иметь низкий SNR, но более низкий уровень артефактов. Поскольку ряд средних значений сигнала (NSA) для захвата данных DWI часто больше 1 для улучшения SNR, s может содержать и число кадров (Ns), и число средних значений. Как описано выше, каждое полное k-пространство содержит NS кадров. Один и тот же объект может сканироваться NEX раз для получения в результате NEX полных k-пространств. Следовательно, в целом, процесс может захватить данные NS × NEX кадров. Значения NS и NEX могут устанавливаться системой (например, быть получены от запоминающего устройства или вычислены на основе системных параметров) или пользователем. Первый член точности данных может быть тем же самым, что и член SENCE. Член низкоранговой регуляризации заставляет низкоранговое свойство изображений (кадров) соответствовать многочисленным кадрам одного и того же объекта (например, в пределах одного и того же многокадрового набора). Следовательно, математическая модель может рассматриваться как модифицированный низкоранговый упорядоченный способ SENCE.
Как обсуждалось выше, если не существует никакого движения вообще, то все эти изображения в многокадровом наборе должны быть точно одинаковыми и ранг равен единице. Если существует лишь случайное, относительно крупномасштабное движение, ранг может оставаться низким (по существу, равным или близким к 1). В этих сценариях математическая модель является теоретически надежной. Однако, модель может перестать работать, когда во время захвата изображения существует непрерывное беспорядочное движение. Соответственно, если модель перестает работать, реконструированные изображения могут содержать артефакты и точность может уменьшаться. Когда в ms-EPI отсутствует какое-либо крупномасштабное движение, ранг может равняться единице и может обеспечиваться для величины Is, поскольку все модули изображений всех кадров многокадрового набора могут рассматриваться как совершенно одинаковые.
В соответствии с некоторыми вариантами осуществления процесс может формировать по меньшей мере одно среднее изображение с использованием, например, анализа SVD для обеспечения низкорангового упорядочивания. Например, процесс может применять анализ SVD для выполнения низкорангового упорядочивания (например, с рангом=1). Этот анализ SVD может использоваться для определения среднего изображения на основе набора изображений из многокадрового набора.
После завершения действия 1005 процесс может перейти к действию 1007, во время которого процесс может реконструировать конечное изображение на основе конечной реконструкции, которая является зарегистрированным средним значением Is. Результат действия 1005 может содержать набор изображений. Если используется ранг, равный единице, то выходным результатом является одно изображение, которое может использоваться в качестве конечного изображения реконструкции. Однако, если используется ранг больше единицы, то выходной результат может содержать набор изображений, которые могут использоваться в качестве конечных изображений реконструкции. Возможно, что модуль этих изображений (например, в последнем случае) отличается. Соответственно, перед выполнением операции усреднения процесс может зарегистрировать модули для каждого из этих изображений из набора изображений. После завершения действия 1007 процесс может перейти к действию 1009.
Во время действия 1009 процесс может отобразить конечное изображение на дисплее системы для удобства пользователя. Процесс может дополнительно обеспечить интерфейс пользователя (UI), с которым пользователь может взаимодействовать, чтобы изменять параметры просмотра, вводить информацию (например, замечания, команды, выборы и т.д.) и т.д. В соответствии с вариантами осуществления настоящей системы одна или более из захвата данных изображения, обработки и визуализации могут происходить в режиме реального времени или, при необходимости, могут быть задержаны. После завершения действия 1009 процесс может перейти к действию 1011.
Во время действия 1011 процесс может сохранять информацию, сформированную процессом, такую как конечное изображение, захваченная МР-информация и т.д., в запоминающем устройстве системы для последующего использования. Как можно легко понять, в любой момент во время и/или после процесса 1000 информация может быть сохранена для последующей визуализации и/или обработки. После завершения действия 1011 процесс может перейти к действию 1013, где процесс может быть закончен.
Варианты осуществления настоящей системы могут использовать декартовы или недекартовы траектории, такие как многокадровая спираль.
В соответствии с вариантами осуществления настоящей системы фаза (или само изображение) каждого кадра из набора многокадрового изображения и будущее реконструированное изображение могут обрабатываться как два неизвестных. Затем для этих неизвестных итеративно и совместно с использованием способов в соответствии с вариантами осуществления настоящей системы могут быть найдены решения.
В соответствии с вариантами осуществления настоящей системы в способе свертки и низкоранговом способе, рассмотренных здесь, один этап в каждом из них заключается в формировании усредненного изображения. В соответствии с вариантами осуществления настоящей системы обсужденная здесь схема SVD усреднения может быть принята для вычисления усредненного изображения. Например, в одной или более итерациях способа свертки, обсужденного здесь, усредненное изображение может вычисляться с использованием, например, обсужденной здесь схемы SVD усреднения. В соответствии с вариантами осуществления настоящей системы каждая итерация обсужденного здесь способа свертки может использовать обсужденную здесь схему SVD усреднения.
Дополнительно, в соответствии с вариантами осуществления настоящей системы низкоранговый способ, обсужденный здесь, может использовать схему SVD усреднения в качестве конкретной реализации для низкорангового упорядочивания (ранг=1).
Результаты испытаний
Выборочные изображения посредством диффузного тензорного отображения (DTI) с высоким разрешением захватывали на системе Philips™ 3T Achieva™ с 8-канальной (ch) головной катушкой (изготовленной Invivo Corp., Гейнсвилль, США). Более конкретно, захват данных выполняли с использованием многокадровой последовательности EPI с дважды перефокусированной схемой спин-эхо и следующими параметрами: (b=800 с/мм2, число усреднений=4, число направлений=6, FOV=230 мм2, пространственное разрешение в плоскости=0,8 мм2, толщина среза 4 мм, частичное отношение Фурье=0,6, FA=90°, TR=2,8 с и TE=70 мс). Число кадров было установлено равным 4 и 8 в зависимости от испытания, как описано ниже.
На фиг. 11 показана карта 1100 FA, сформированная с использованием 4-кадрового набора данных при работе в соответствии с вариантами осуществления настоящей системы. Карта 1100 FA показывает четыре изображения а-d, где изображение а получали с использованием предложенного низкорангового способа отображения SENCE, функционирующего в соответствии с вариантами осуществления настоящей системы, изображение b получали с использованием способа отображения MUSE, а изображения c и d являются увеличенными в масштабе изображениями a и b, соответственно. Изображения, полученные с использованием низкорангового способа SENCE и способа MUSE, показывают схожее качество изображений.
На фиг. 12 показана карта 1200 FA, сформированная с использованием 8-кадрового набора данных при работе в соответствии с вариантами осуществления настоящей системы. Карта 1200 FA показывает четыре изображения, где каждый из столбцов показывает разные срезы, а верхняя строка показывает изображения, полученные с использованием низкорангового способа SENCE, а строка ниже показывает изображения, полученные с использованием способа MUSE. Когда число кадров установлено равным восьми, начальный SENCE в MUSE имеет коэффициент ускорения, равный 8. Однако, 8-канальная катушка не обеспечивает информацию для значимой реконструкции, чтобы предоставить необходимую фазовую информацию для способа MUSE. Следовательно, изображения, реконструированные с использованием способа MUSE, являются неприемлемыми. С другой стороны, низкоранговый способ SENCE все еще обеспечивает высококачественные изображения.
На фиг. 13 показана карта 1300, сформированная с использованием 8-кадрового набора данных при работе в соответствии с вариантами осуществления настоящей системы. Карта 1300 содержит четыре изображения, соответствующие данным DWI мозга живого организма, использующим регулярную спиральную настройку без пользователя навигатора. Эти изображения были захвачены на сканере Philips™ 3T со следующими параметрами: 8 каналов, 8 кадров, TE/TR=46/2900 мс, FOV=210×210 мм, разрешающая способность=0,86×0,86 мм, толщина среза=3 мм, b-значение=800 с/мм2, направления диффузии=15, длительность считывания=30 мс.
На фиг. 14 показана карта 1400, сформированная с использованием 12-кадрового набора данных при работе в соответствии с вариантами осуществления настоящей системы. Карта 1400 содержит четыре изображения, соответствующие данным DWI мозга живого организма с использованием регулярной спиральной настройки без пользователя навигатора. Эти изображения захватывали на сканере Philips™ 3T со следующими параметрами: 32 канала, 12 кадров, TE/TR=49/2500 мс, FOV=220×220 мм, разрешающая способность=0,9×0,9 мм, толщина среза=4 мм, b-значение=1000 с/мм2, направления диффузии=6, длительность считывания=18 мс.
Более конкретно, изображения в каждой из карт 1300 и 1400 расположены в левом и правом столбцах внутри соответствующих карт 1300 и 1400, и в каждой из этих карт изображения в левом столбце реконструировали с использованием способа SENSE+CG, а изображения в правом столбце реконструировали с использованием низкорангового способа SENCE при работе в соответствии с вариантами осуществления настоящей системы. Белые стрелки могут указывать область, в которой реконструкция низкорангового SENCE имеет более высокое SNR, чем стандартный способ SENSE+CG.
Соответственно, варианты осуществления настоящей системы могут обеспечить системы и способы для эффективного снижения артефактов за счет межкадрового движения при многокадровом захвате. Варианты осуществления настоящей системы могут быть особо пригодны для использования с системами многокадровых EPI DWI и способами высокого пространственного разрешения, и системами и способами получения томографических изображений.
Способ реконструкции целевого изображения, функционирующий в соответствии с вариантами осуществления настоящей системы, обсуждается со ссылкой на фиг. 15, на котором показана блок-схема последовательности операций, которая иллюстрирует процесс 1500, который может выполняться магнитно-резонансной системой в соответствии с вариантами осуществления настоящей системы. Процесс 1500 может выполняться с использованием одного или более компьютеров, осуществляющих связь по сети и способных получать информацию от и/или сохранять информацию в одном или более запоминающих устройствах, которые могут быть локальными и/или удаленными друг от друга. Процесс 1500 и другие процессы, представленные здесь, в соответствии с вариантами осуществления настоящей системы могут содержать одно или более из следующих действий. Дополнительно, одно или более из этих действий, при необходимости, могут объединяться и/или разделяться на поддействия. Дополнительно, одно или более из этих действий могут пропускаться, в зависимости от настроек. Информация изображения может содержать, например, информацию изображения, захваченную из многокадровой последовательности изображений. При функционировании процесс 1500 может начинаться во время действия 1501 и затем переходить к действию 1503.
Во время действия 1503 процесс может выполнять многокадровый процесс захвата для захвата МР-информации (например, информации отраженного сигнала, аналоговой МР-информации и т.д.) для по меньшей мере одного многокадрового набора (например, набора кадров), содержащего множество кадров. Процесс многокадрового захвата может выполняться в соответствии с многокадровой последовательностью, такой как ms-EPI-последовательность сканирования диффузно взвешенного изображения (DWI). В соответствии с некоторыми вариантами осуществления ms-EPI-сканирование может иметь чередующиеся типы и/или типы считываемых направлений. Процесс многокадрового захвата может дополнительно выполняться с использованием любого подходящего способа многокадрового захвата, такого как турбо-спин-эхо (TSE), многокадрового спирального способа, PROPELLOR и/или ms-эхо- планарного способа отображения (ms-EPI). Каждый многокадровый набор может содержать NS кадров и может сканироваться NEX раз. Таким образом, в соответствии с вариантами осуществления настоящей системы процесс может захватить NS*NEX изображений. Соответственно, процесс может захватить МР-информацию (например, информацию отраженного сигнала, аналоговую МР-информацию и т.д.) для NS*NEX изображений, и процесс может захватить ряд (который, например, может равняться NEX) одних и тех же изображений. Как пример, это действие может быть подобно, например, описанному здесь действию 403, хотя могут подходящим образом применяться и другие способы захвата изображений. После завершения действия 1503 процесс может перейти к действию 1505.
Во время действия 1505 процесс может выполнить совместную реконструкцию, где NS*NEX изображений и целевое изображение обрабатывают как наборы неизвестных. Процесс может затем численно решать эти два набора неизвестных, совместно используя любой подходящий математический способ или способы. Например, процесс может использовать способ свертки и/или низкоранговый способ (как обсуждалось относительно блок-схемы последовательности операций по фиг. 2 и 10, соответственно), функционирующие в соответствии с вариантами осуществления настоящей системы, для получения численного решения этих двух наборов неизвестных. Дополнительно предусмотрено, что численное решение может быть получено одновременно или последовательно так, чтобы совместно численно решить два набора неизвестных. В это время процесс может итеративно вычислять решения для NS*NEX изображений и целевого изображения с использованием по меньшей мере одного из способа свертки или низкорангового способа в соответствии с вариантами осуществления настоящей системы для решения наборов неизвестных (например, многокадровых наборов) с определением целевого изображения. После завершения действия 1505 процесс может перейти к действию 1507.
Во время действия 1507 процесс может отобразить совместно реконструированное целевое изображение на дисплее системы для удобства пользователя. Дополнительно, процесс может дополнительно обеспечивать интерфейс пользователя (UI), с которым пользователь может взаимодействовать, чтобы изменять параметры просмотра, вводить информацию (например, замечания, команды, выборы и т.д.) и т.д. В соответствии с вариантами осуществления настоящей системы одно или более из захвата изображения, обработки и визуализации могут происходить в режиме реального времени или, при необходимости, могут быть задержаны, например, посредством сохранения изображения и последующей обработки. После завершения действия 1507 процесс может перейти к действию 1509.
Во время действия 1509 процесс может сохранять информацию, сформированную процессом, такую как информация МР-изображения, вычисленное целевое изображение и т.д., в запоминающем устройстве системы, например, для последующего использования. Как можно легко понять, в любой момент во время и/или после процесса 1500 информация может сохраняться для последующей визуализации и/или обработки. После завершения действия 1509 процесс может перейти к действию 1511, где процесс может быть закончен.
Варианты осуществления настоящей системы могут одновременно обрабатывать фазу изображения (или само изображение) покадрово и будущее реконструированное изображение (например, целевое изображение) как два неизвестных, и решения для этих двух неизвестных могут быть найдены итеративно и совместно. Напротив, стандартные способы могут независимо получить некоторое решение для этих двух неизвестных, которые могут дать в результате изображение более низкого качества по сравнению с качеством изображения, которое может быть получено в соответствии с вариантами осуществления настоящей системы.
Варианты осуществления настоящей системы могут реконструировать одиночное целевое изображение. Чтобы повысить качество одиночного целевого изображения по сравнению с изображением, полученным стандартными способами, предусмотрено, что процесс, функционирующий в соответствии с вариантами осуществления настоящей системы, может захватывать многокадровые данные (например, NS) для ряда усредненных значений сигнала (например, NSA или NEX) раз и создавать NS×NEX изображений. Затем процесс может итеративно вычислить решение для NS×NEX изображений и целевого изображения. Процессу может не понадобиться определять фазовую информацию для NS*NEX изображений до реконструкции целевого изображения. В соответствии с вариантами осуществления настоящей системы процесс может обрабатывать и NS×NEX изображений, и целевое изображение в качестве неизвестных и совместно вычислять решения для этих двух наборов неизвестных. В соответствии с некоторыми вариантами осуществления для получения решений вычисления применяют способ свертки и/или низкоранговый способ. Дополнительно, вычисления для определения решений для двух наборов неизвестных могут выполняться одновременно или последовательно.
Дополнительно, варианты осуществления настоящей системы могут дополнительно применять способ усреднения SVD (например, см. фиг. 4) для определения целевого изображения. Например, способ свертки и/или низкоранговый способ могут применять способ усреднения SVD для определения целевого изображения из информации многокадрового изображения, такой как из NS*NEX изображений.
На фиг. 16 показана часть системы 1600 в соответствие с вариантами осуществления настоящей системы. Например, часть настоящей системы может содержать процессор 1610 (например, контроллер), функционально связанный с запоминающим устройством 1620, дисплеем 1630, РЧ-преобразователями 1660, магнитными катушками 1690 и устройством 1670 ввода данных пользователем. Запоминающее устройство 1620 может быть любым типом устройства для сохранения прикладных данных, а также других данных, связанных с описанной операцией. Прикладные данные и другие данные принимаются процессором 1610 для конфигурирования (например, программирования) процессора 1610 для выполнения операционных действий в соответствии с настоящей системой. Процессор 1610, сконфигурированный таким образом, становится машиной специального назначения, особенно пригодной для выполнения операций в соответствии с вариантами осуществления настоящей системы.
Операционные действия могут содержать конфигурирование системы МРТ, например, управление магнитными катушками 1690 и/или РЧ-преобразователями 1660. Магнитные катушки 1690 могут содержать основные магнитные катушки и градиентные катушки (например, x-, y- и z-градиентные катушки) и могут управляться для излучения основного магнитного поля и/или градиентных полей в требуемом направлении и/или с нужной напряженностью. Контроллер может управлять одним или более источниками электропитания для подачи электропитания на магнитные катушки 1690 с тем, чтобы требуемое магнитное поле излучалось в требуемое время. РЧ-преобразователи 1660 могут управляться для передачи РЧ-импульсов пациенту и/или для приема от него информации отраженного сигнала. Реконструктор может обрабатывать принятые сигналы, такие как информация отраженного сигнала, и преобразовывать их (например, с использованием одного или более методов реконструкции по вариантам осуществления настоящей системы) в контент, который может содержать информацию изображения (например, неподвижные или видеоизображения (например, видеоинформация)), данные и/или графики, которые могут визуализироваться, например, на интерфейсе пользователя (UI) настоящей системы, такой как дисплей 1630 и т.д. Дополнительно, контент может затем сохраняться в запоминающем устройстве системы, таком как запоминающее устройство 1620, для последующего использования. Таким образом, операционные действия могут содержать запрос, предоставление и/или визуализацию контента, такого, как, например, информация реконструированного изображения, полученная из информации отраженного сигнала, как описано здесь. Процессор 1610 может визуализировать контент, такой как видеоинформация, на UI системы, таком как дисплей системы.
Устройство 1670 ввода данных пользователем может содержать клавиатуру, мышь, шаровой манипулятор или другое устройство, такое как сенсорный дисплей, которые могут быть автономным или быть частью системы для связи с процессором 1610 через любой оперативный канал связи. Устройство 1670 ввода данных пользователем может быть выполнено с возможностью взаимодействия с процессором 1610, в том числе обеспечения взаимодействия с UI, как описано здесь. Очевидно, что процессор 1610, запоминающее устройство 1620, дисплей 1630 и/или устройство 1670 ввода данных пользователем могут полностью или частично быть частью компьютерной системы или другого устройства, такого как МР-система.
Способы настоящей системы особенно пригодны для осуществления такой программой из программного обеспечения компьютера, которая содержит модули, соответствующие одному или более отдельным описанным этапам или действиям и/или предусмотренным настоящей системой. Такая программа может, конечно, быть осуществлена на считываемом компьютером носителе, таком как интегральная микросхема, периферийное устройство или память, такая как запоминающее устройство 1620 или другое запоминающее устройство, связанное с процессором 1610.
Программа и/или части программы, содержащиеся в запоминающем устройстве 1620, могут конфигурировать процессор 1610 для реализации раскрытых здесь способов, операционных действий и функций.
Процессор 1610 выполнен с возможностью обеспечения сигналов управления и/или выполнения операций в ответ на входные сигналы от устройства 1670 ввода данных пользователем, а также в ответ на действия других устройств, например, сети 1680, и выполнения команд, хранящихся в запоминающем устройстве 1620. Процессор 1610 может содержать один или более микропроцессоров, специализированных или универсальных интегральных схем, логических устройств и т.д. Дополнительно, процессор 1610 может быть выделенным процессором для выполнения действий в соответствии с настоящей системой или может быть универсальным процессором, в котором только одна из многих функций функционирует для работы в соответствии с настоящей системой. Процессор 1610 может функционировать, используя часть программы, многочисленные сегменты программы, или может быть устройством-аппаратным обеспечением, использующим специализированную или универсальную интегральную схему.
Варианты осуществления настоящей системы могут обеспечить быстрые способы отображения для захвата и реконструирования многокадровых изображений. Подходящие приложения могут содержать системы отображения, такие как системы МРТ и МРC и т.п., которые требуют: короткого времени захвата и высокого разрешения, в то же время исключая отрицательные эффекты, такие как эффекты за счет химического изменения и неоднородности основного поля. Дополнительные варианты настоящей системы могут легко выполняться специалистом в данной области техники и охватываются нижеследующей формулой изобретения.
Наконец, представленное выше обсуждение предназначено быть просто иллюстрацией настоящей системы и не должно быть истолковано как ограничивающее прилагаемую формулу изобретения каким-либо конкретным вариантом осуществления или группой вариантов осуществления. Таким образом, хотя настоящая система была описана со ссылкой на примерные варианты осуществления, следует также понимать, что специалистами в данной области техники могут быть разработаны многочисленные модификации и альтернативные варианты осуществления, не отступая от расширенных и подразумеваемых сущности и объема настоящей системы, которые изложены в формуле изобретения, приведенной ниже. Кроме того, содержащиеся здесь заголовки разделов предназначены для облегчения рассмотрения, но не предназначены для ограничения объема настоящей системы. Соответственно, описание и чертежи должны рассматриваться как иллюстрация и не предназначены для ограничения объема приложенной формулы изобретения.
При интерпретации приложенной формулы изобретения следует понимать, что:
a) слово "содержащий" не исключает наличие других элементов или действий, отличных от перечисленных в данном пункте формулы изобретения;
b) единственное число элемента не исключает наличие множества таких элементов;
c) любые ссылочные позиции в формуле изобретения не ограничивают ее объем;
d) несколько "средств" могут быть представлены одним и тем же элементом или структурой или функцией, реализуемыми аппаратными средствами или программным обеспечением;
e) любой из раскрытых элементов может состоять из частей аппаратного обеспечения (например, содержащих дискретную и интегральную электронную схему), частей программного обеспечения (например, компьютерного программирования) и любой их комбинации;
f) части аппаратного обеспечения могут состоять из аналоговой или цифровой части или того и другого вместе;
g) любое из раскрытых устройств или их частей могут объединяться вместе или разделяться на дополнительные части, если конкретно не указано иное;
h) никакая конкретная последовательность действий или этапов не должна требоваться, если это конкретно не указано; и
i) термин "множество" элементов содержит два или более заявленных элементов и не подразумевает никакого конкретного диапазона числа элементов; то есть множество элементов может быть только лишь двумя элементами, а может содержать неизмеримое число элементов.
Литература
Ссылки 1-9, перечисленные ниже, включены сюда посредством ссылки и упоминаются здесьс использованием по всему описанию ссылочных позиций R1-R9, соответственно. Например, R1 может являться ссылочной позицией на первую ссылку (например, Chen N-k).
1. Chen N-k, Guidon A, Chang H-C, Song AW, A robust multi-shot scan strategy for high-resolution diffusion weighted MRI enabled by multiplexed sensitivity-encoding (MUSE), NeuroImage 2013; 72: 41-47.
2. Pruessmann KP, Weiger M, Scheidegger MB, Boesiger P. SENSE: Sensitivity encoding for fast MRI, MagnReson Med 1999; 42: 952-962.
3. Zhao B, Haldar JP, Brinegar C, Liang Z-P, Low rank matrix recovery for real-time cardiac MRI, IEEE ISBI; 2010, p 996-999.
4. Jeong H-K, Gore JC, Anderson AW, High-Resolution Human Diffusion Tensor Imaging Using 2-D Navigated Multishot SENSE EPI at 7 T, MagnReson Med 2013; 69: 793-802.
5. Fautz HP, Honal M, Saueressig U, Schafer O, Kannengiesser SAR, Artifact Reduction in Moving-Table Acquisitions Using Parallel Imaging and Multiple Averages, Magn Reson Med 2007; 57: 226-232.
6. Walsh DO, Gmitro AF, Marcellin MW, Adaptive Reconstruction of Phased Array MR Imagery, Magn Reson Med 2000; 43: 682-690.
7. Huang F, Lin W, Börnert P, Li Y, Reykowski A, Data Convolution and Combination OperAtion (COCOA) for Motion Ghost Artifacts Reduction, MagnReson Med 2010; 64(1): 157-166.
8. Truong TK, Chen NK, Song AW, Inherent correction of motion-induced phase errors in multishot spiral diffusion-weighted imaging, Magn Reson Med 2012; 68(4): 1255-1261.
9. Griswold MA, Jakob PM, Heidemann RM, Mathias Nittka, Jellus V, Wang J, Kiefer B, Haase A, Generalized Autocalibrating Partially Parallel Acquisitions (GRAPPA), Magn Reson Med 2002; 47: 1202-1210.
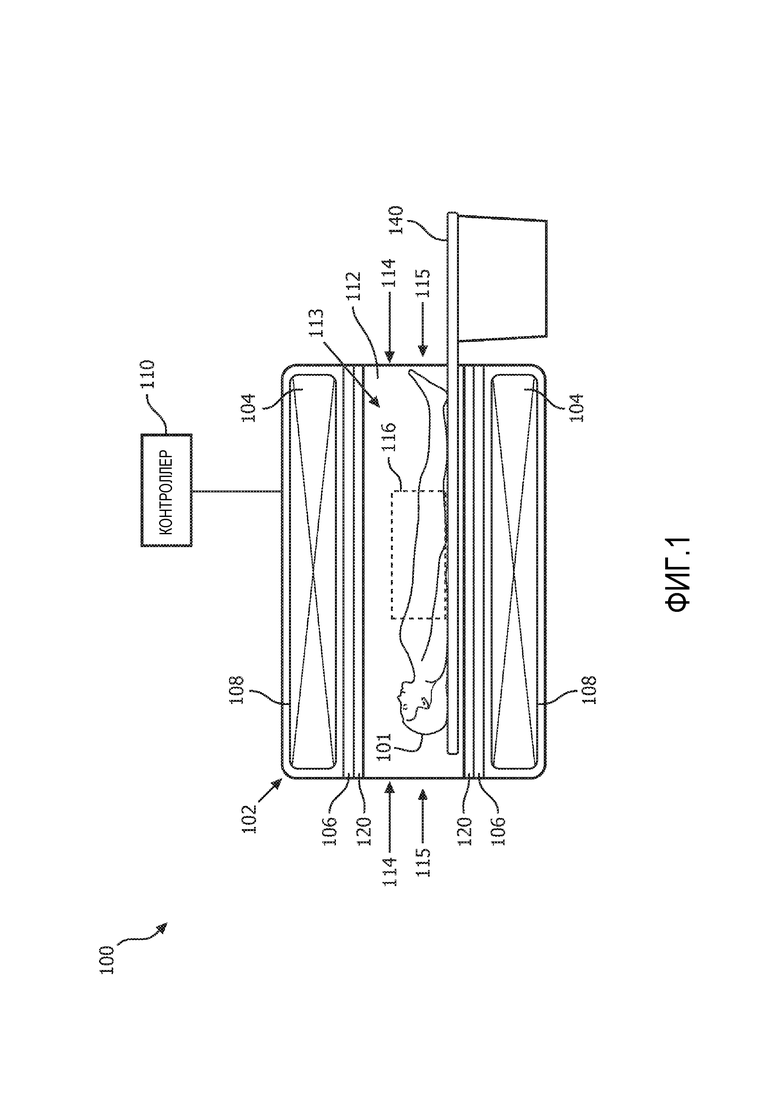
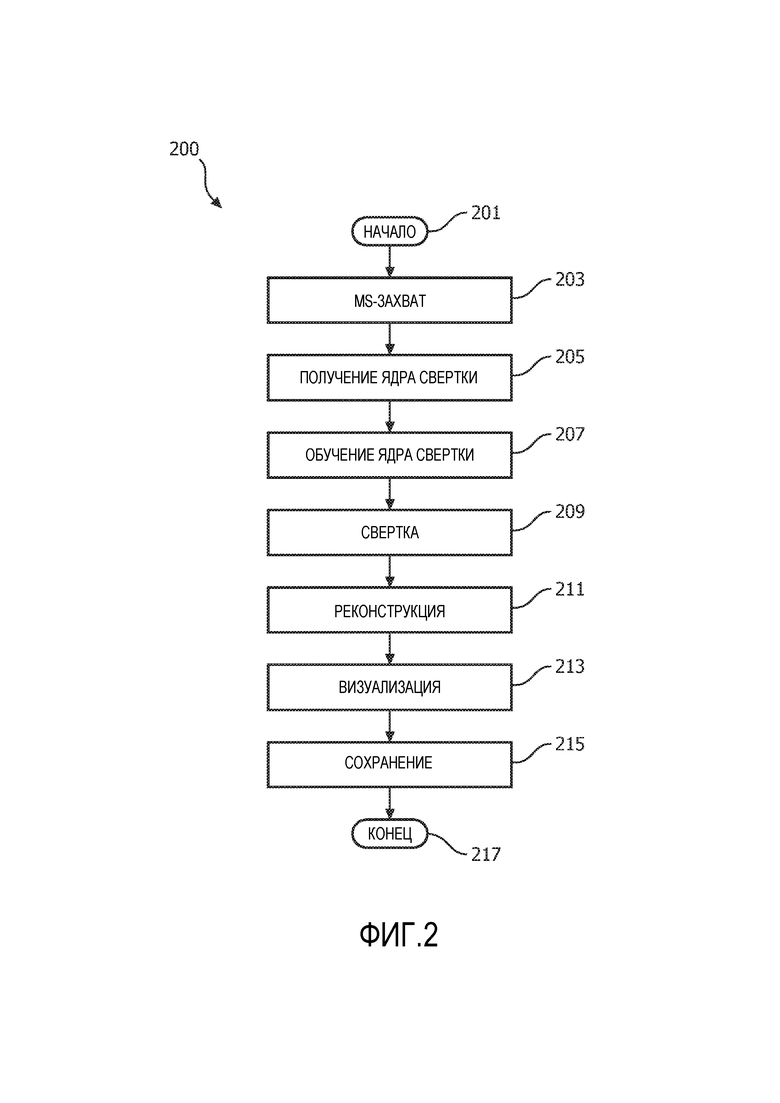
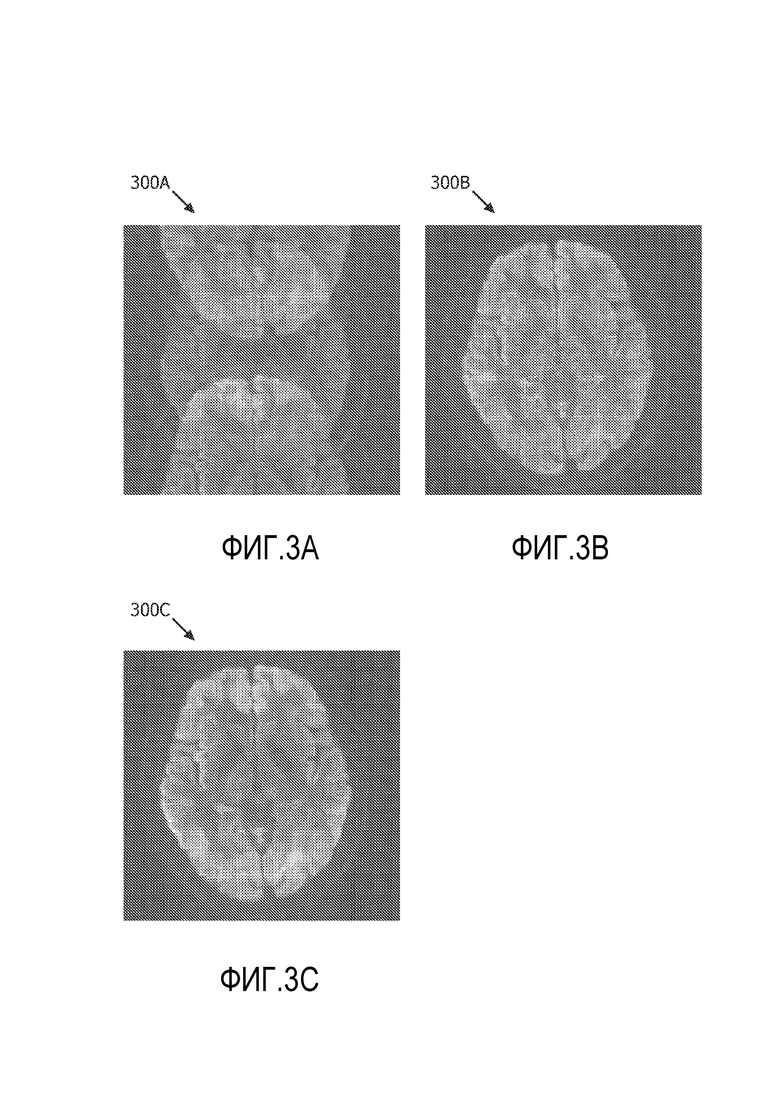
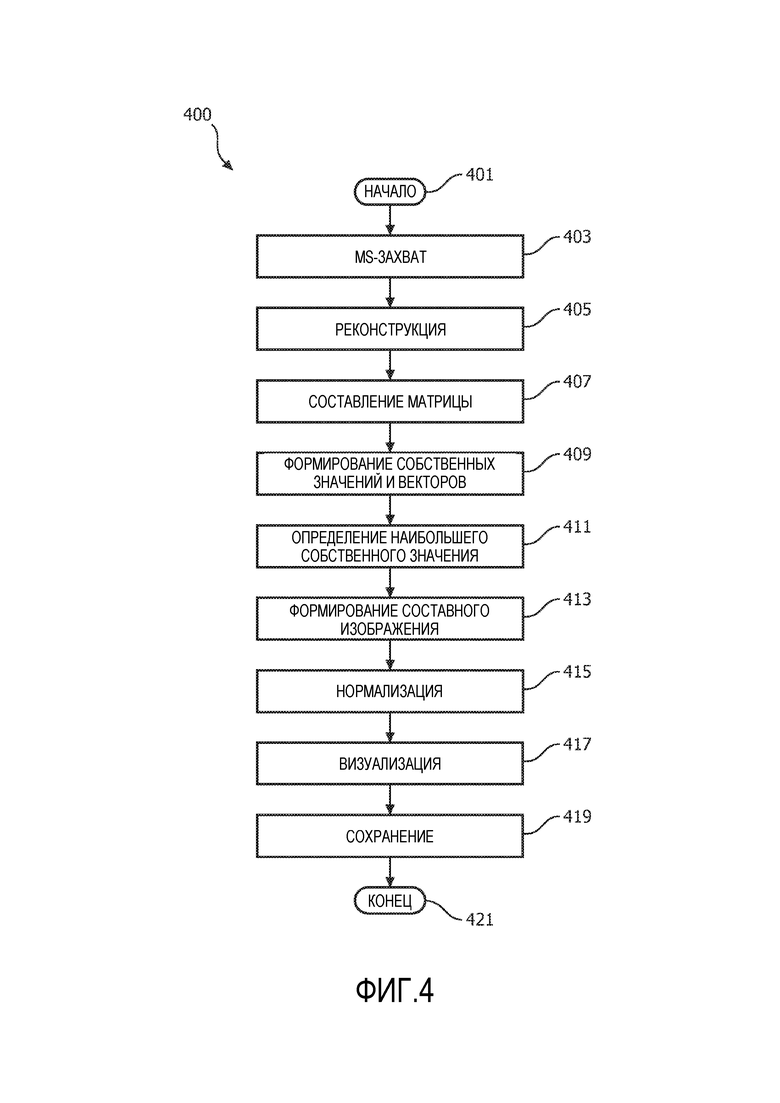
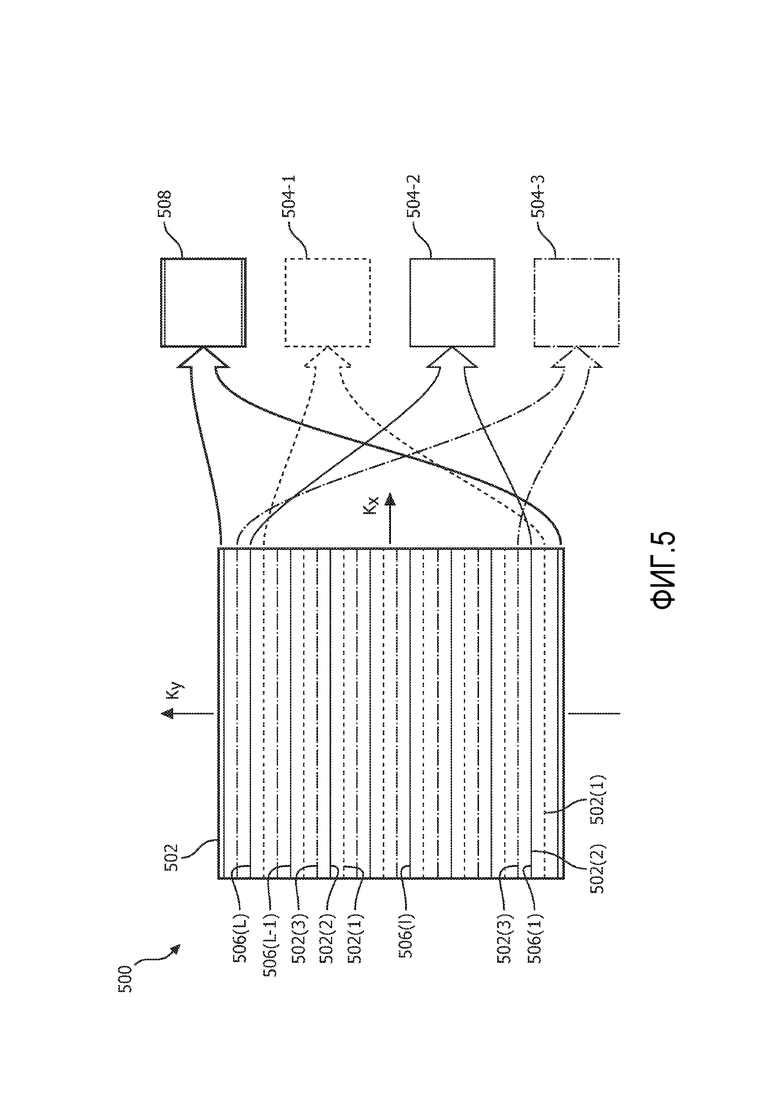
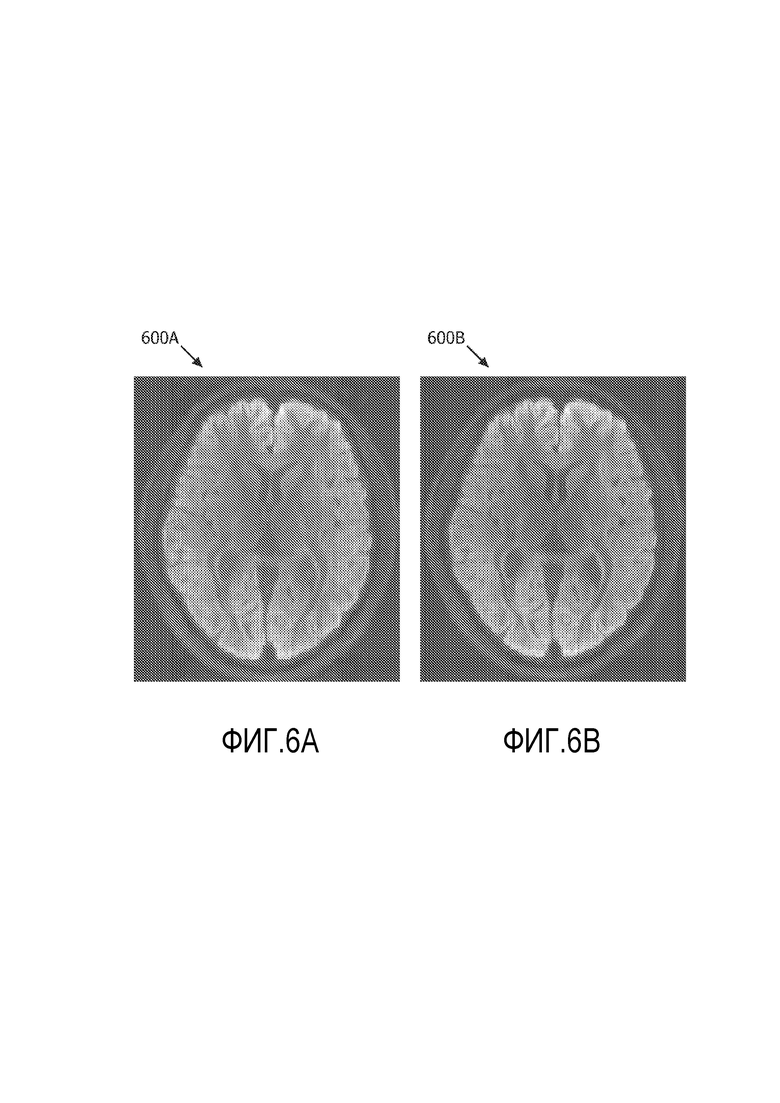
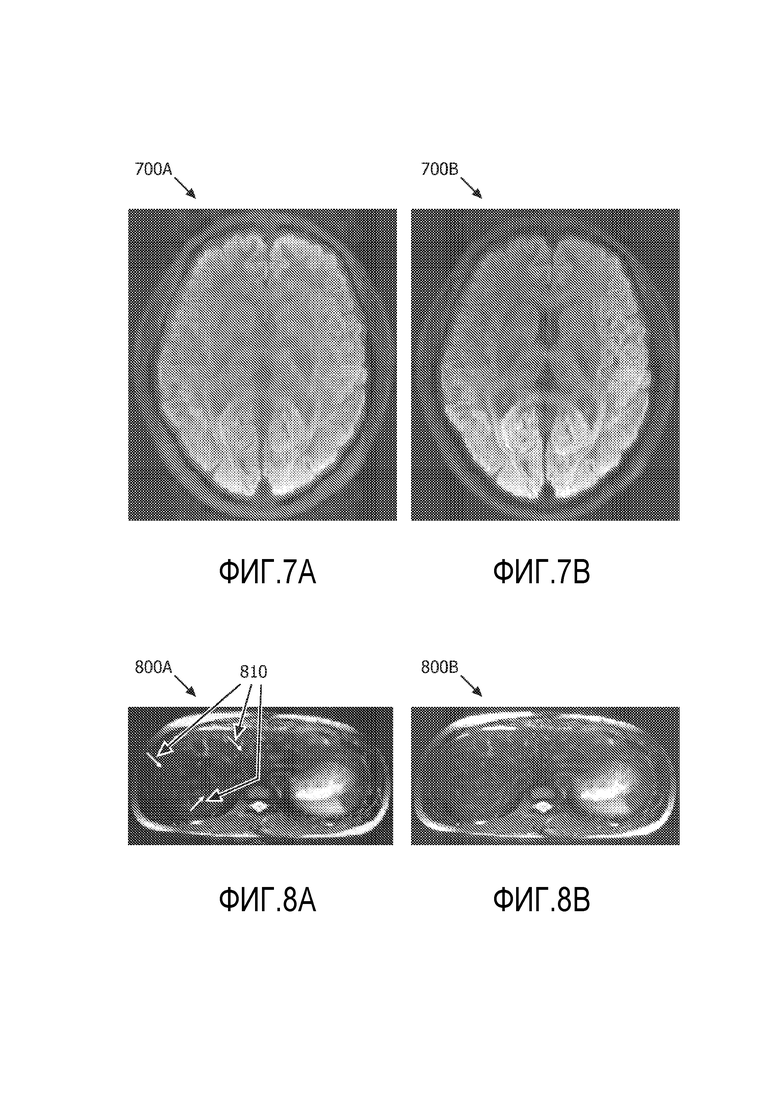
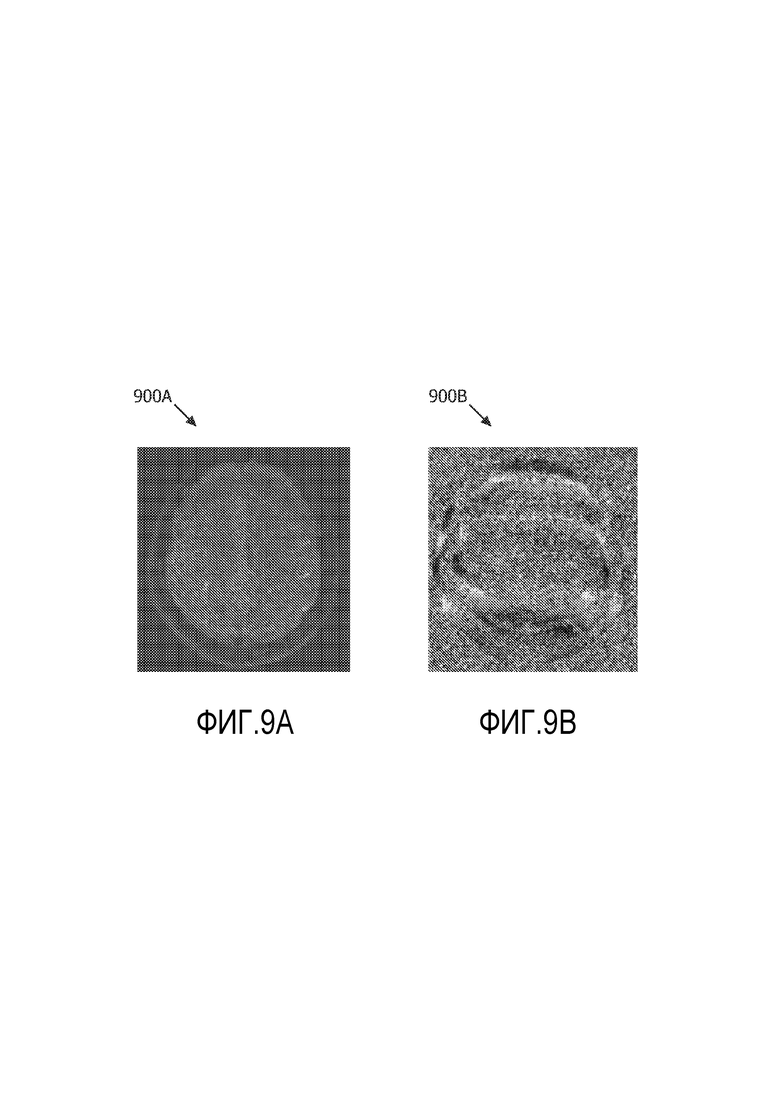
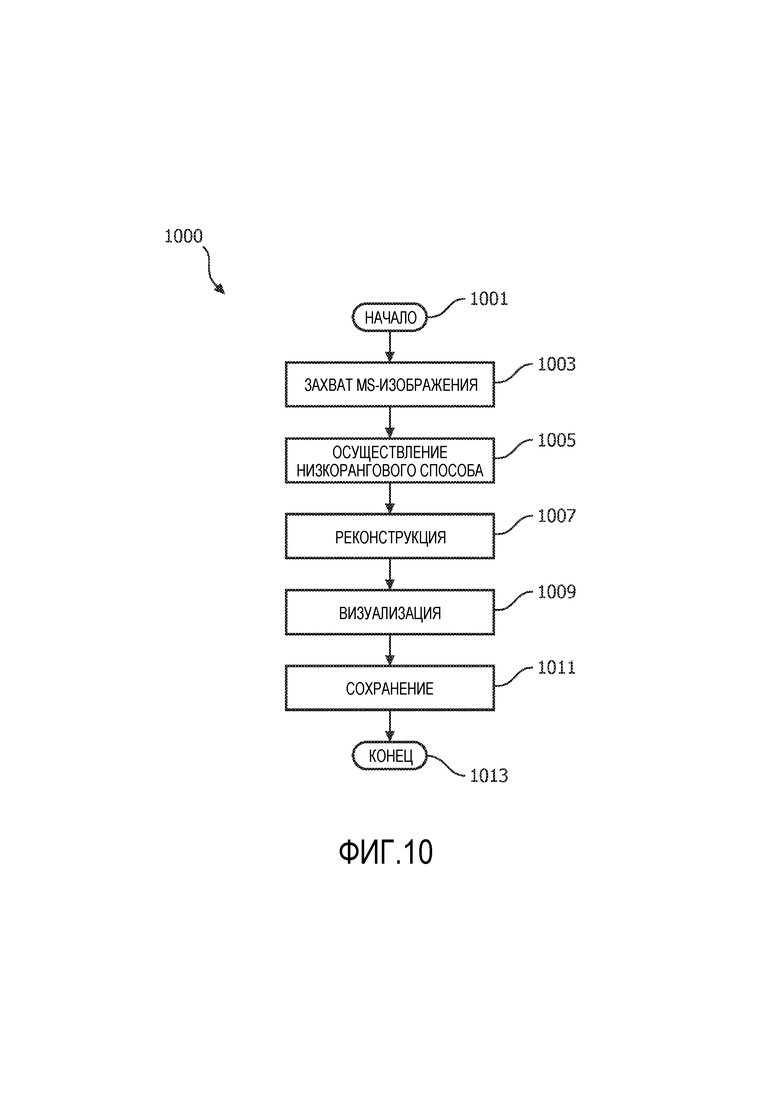
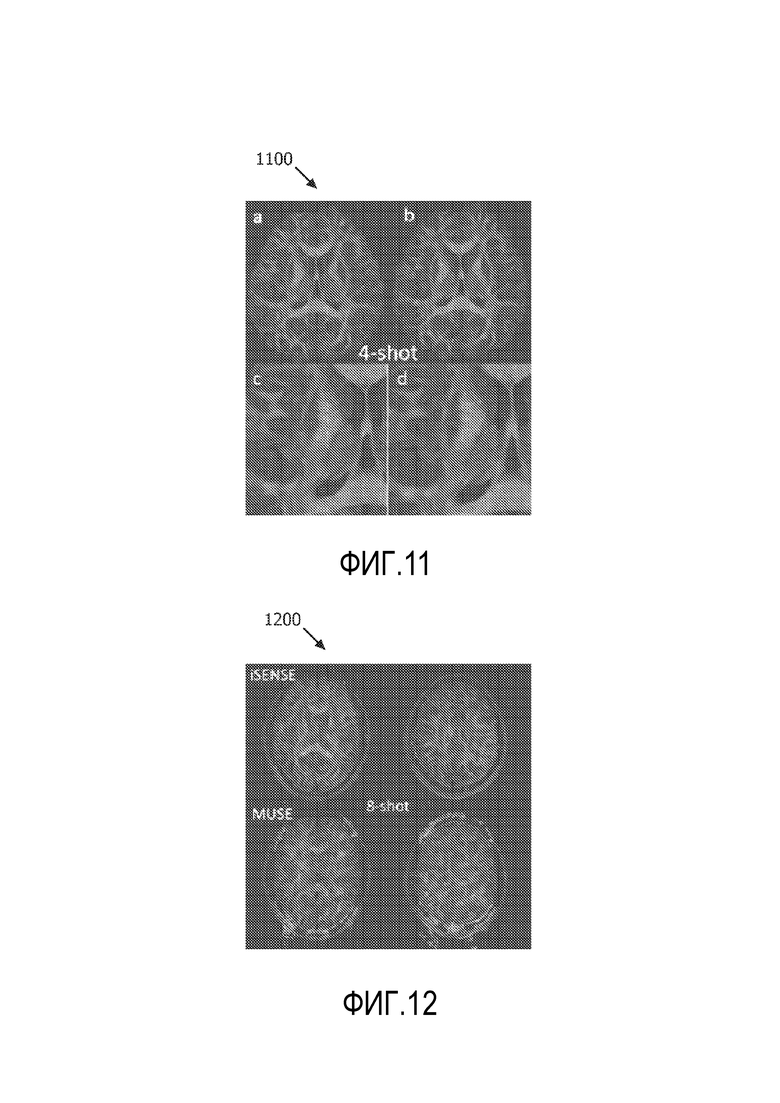
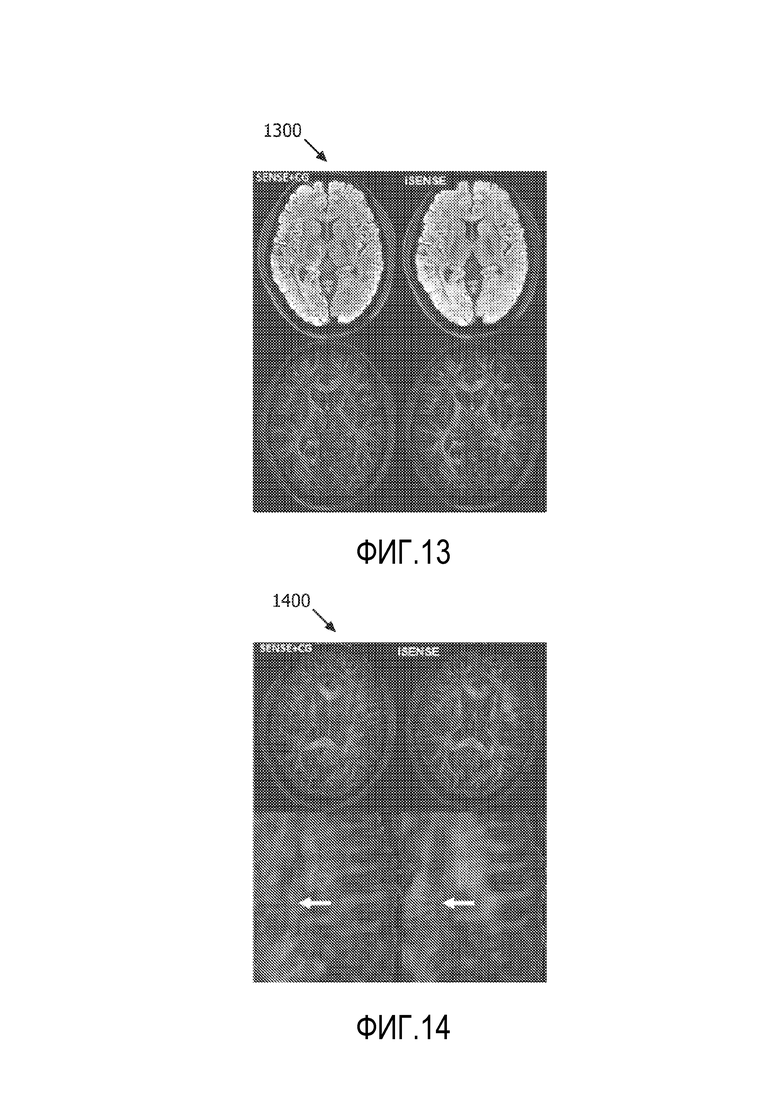
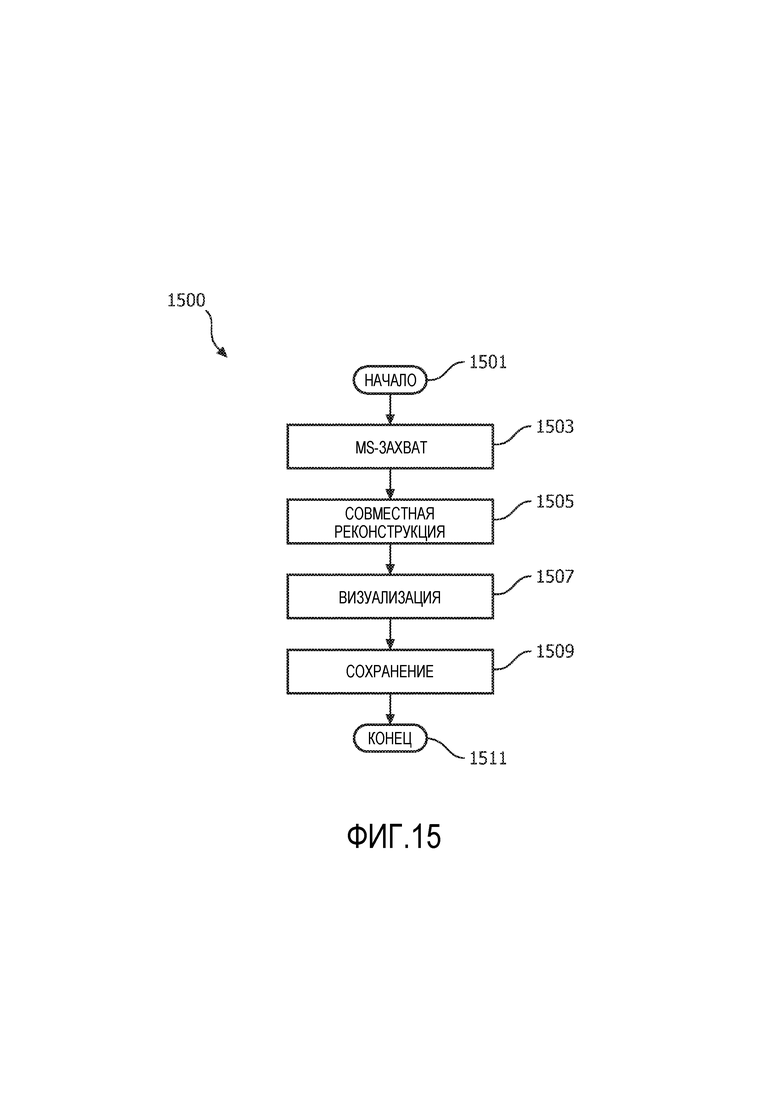
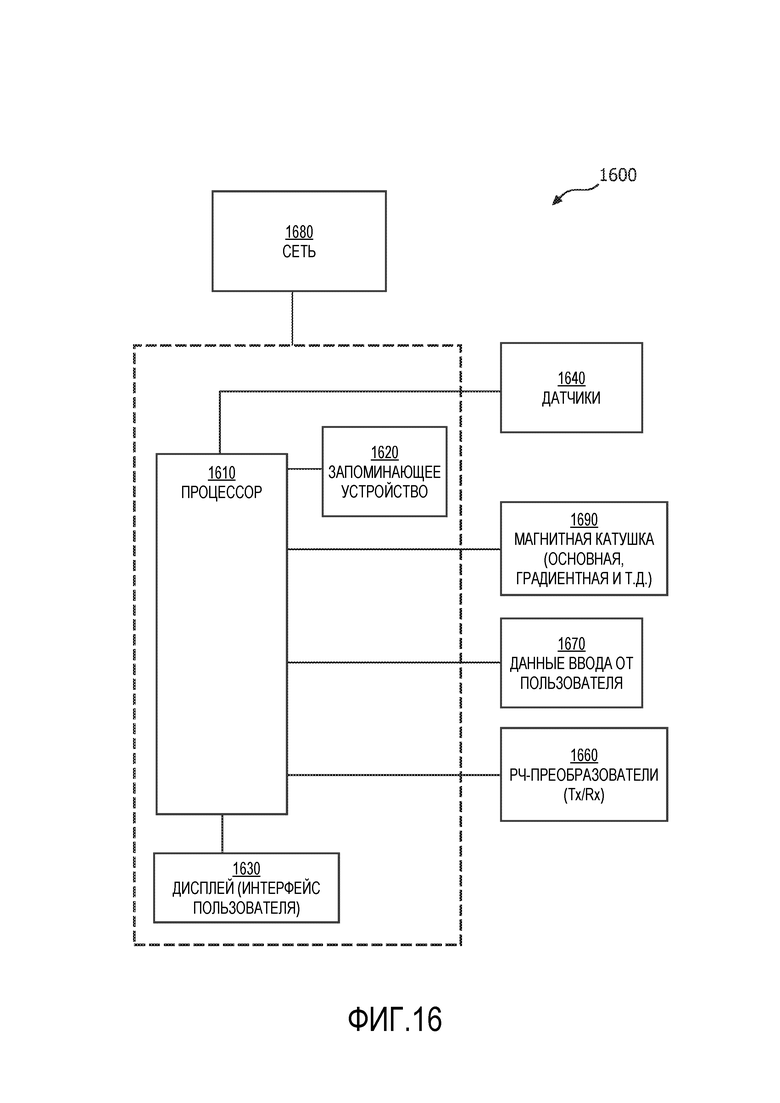
Группа изобретений относится к системам магнитно-резонансной томографии (МРТ) для уменьшения артефактов движения в реконструированных магнитно-резонансных (МР) изображениях, которые захватывают с использованием способов захвата многокадровых (ms) изображений, и более конкретно к системе МРТ, которая может включать уменьшение артефактов, возникающих из-за межкадрового движения при захватах многокадровых МР-изображений, и к способу ее функционирования. Система магнитно-резонансной (МР) томографии (МРТ) содержит корпус, основной магнит, градиентные катушки, радиочастотный (РЧ) блок, контроллер, запоминающее устройство, выполненное с возможностью хранения по меньшей мере последовательностей сканирования, параметров сканирования и сформированной информации изображения, и дисплей, выполненный с возможностью отображения сформированной информации изображения. Причем контроллер выполнен с возможностью управления градиентными катушками и РЧ-блоком с выполнением процесса захвата многокадрового изображения для захвата МР-информации для набора многокадрового изображения, каждый из которых содержит соответствующие данные, при этом часть МР-информации является получаемой с использованием градиента магнитного поля, а другая часть МР-информации является получаемой без использования градиента магнитного поля; обучения ядра свертки, содержащего данные о части МР-информации, полученной без использования градиента магнитного поля или при использовании процесса самообучения, при этом ядро свертки содержит данные свертки; итеративной свертки МР-информации, полученной с использованием градиента магнитного поля для двух из множества кадров изображения, обученным ядром свертки с формированием синтетических данных k-пространства для каждого соответствующего кадра из двух кадров изображения из множества кадров изображения для коррекции ошибок, связанных с движением, при этом синтетические данные k-пространства формируют при обеспечении согласования данных между двумя из множества кадров изображения во время итеративной свертки; проецирования синтетических данных k-пространства для двух кадров изображения; усреднения спроецированных синтетических данных k-пространства с формированием информации изображения о пациенте. Способ реконструкции изображения определяется работой системы МРТ. Считываемый компьютером невременный носитель, хранящий программное обеспечение, выполнен с возможностью управления системой магнитно-резонансной (МР) томографии. Использование группы изобретений позволяет уменьшить артефакты движения в реконструированных МР изображениях. 3 н. и 14 з.п. ф-лы, 16 ил.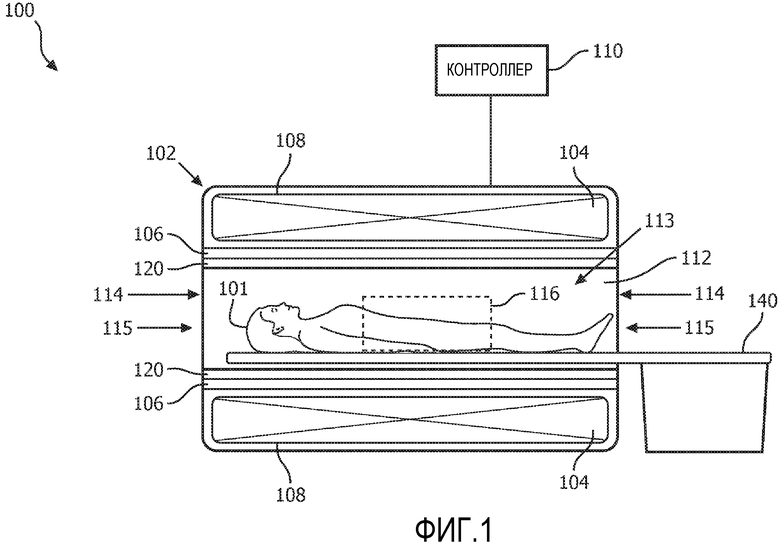
1. Система магнитно-резонансной (МР) томографии (МРТ), содержащая:
корпус;
основной магнит, выполненный с возможностью формирования основного магнитного поля в корпусе;
градиентные катушки, выполненные с возможностью формирования градиентов магнитного поля в корпусе;
радиочастотный (РЧ) блок, выполненный с возможностью передачи РЧ-импульсов в и/или приема индуцированных магнитно-резонансных сигналов от пациента, находящегося в основном магнитном поле;
по меньшей мере один контроллер, выполненный с возможностью:
управления градиентными катушками и РЧ-блоком с выполнением процесса захвата многокадрового изображения для захвата МР-информации для по меньшей мере одного набора многокадрового изображения, содержащего множество кадров изображения, каждый из которых содержит соответствующие данные, при этом по меньшей мере часть МР-информации является получаемой с использованием градиента магнитного поля, а по меньшей мере другая часть МР-информации является получаемой без использования градиента магнитного поля;
обучения ядра свертки, содержащего данные о по меньшей мере части МР-информации, полученной без использования градиента магнитного поля или при использовании процесса самообучения, при этом ядро свертки содержит данные свертки;
итеративной свертки МР-информации, полученной с использованием градиента магнитного поля для по меньшей мере двух из множества кадров изображения упомянутого по меньшей мере одного набора многокадрового изображения, обученным ядром свертки с формированием синтетических данных k-пространства для каждого соответствующего кадра из упомянутых по меньшей мере двух кадров изображения из множества кадров изображения для коррекции ошибок, связанных с движением, при этом синтетические данные k-пространства формируют при обеспечении согласования данных между по меньшей мере двумя из множества кадров изображения во время итеративной свертки;
проецирования синтетических данных k-пространства для упомянутых по меньшей мере двух кадров изображения из множества кадров изображения упомянутого по меньшей мере одного набора многокадрового изображения в пространство изображения; и
усреднения спроецированных синтетических данных k-пространства, которые спроецированы в пространство изображения, с формированием информации изображения о пациенте;
запоминающее устройство, выполненное с возможностью хранения по меньшей мере последовательностей сканирования, параметров сканирования и сформированной информации изображения; и
дисплей, выполненный с возможностью отображения сформированной информации изображения.
2. Система МРТ по п. 1, в которой упомянутый по меньшей мере один контроллер поддерживает данные ядра свертки постоянными при выполнении итеративной свертки для соответствующего многокадрового набора.
3. Система МРТ по п. 1, в которой упомянутый по меньшей мере один контроллер дополнительно выполнен с возможностью фиксации данных ядра свертки с тем, чтобы сформировать согласованную корреляцию во время итеративной свертки для упомянутого по меньшей мере одного набора многокадрового изображения.
4. Система МРТ по п. 1, в которой синтетические данные k-пространства формируют ряд наборов кадров (Ns) синтетических данных k-пространства.
5. Система МРТ по п. 1, в которой во время усреднения упомянутый по меньшей мере один контроллер выполнен с возможностью усреднения величин синтетических данных k-пространства для упомянутых по меньшей мере двух кадров из множества кадров изображения.
6. Система МРТ по п. 1, в которой упомянутый по меньшей мере один контроллер дополнительно выполнен с возможностью визуализации сформированной информации изображения на дисплее.
7. Способ реконструкции изображений, полученных системой магнитно-резонансной (МР) томографии (МРТ), имеющей по меньшей мере один контроллер, запоминающее устройство, основной магнит, градиентные катушки и радиочастотный блок, причем упомянутый способ выполняется упомянутым по меньшей мере одним контроллером системы МР-томографии и содержит действия по:
управлению градиентными катушками и РЧ-блоком с выполнением процесса захвата многокадрового изображения для захвата МР-информации для по меньшей мере одного набора многокадрового изображения, содержащего множество кадров изображения, каждый из которых содержит соответствующие данные, причем по меньшей мере часть МР-информации является получаемой с использованием градиента магнитного поля, а по меньшей мере другая часть МР-информации является получаемой без использования градиента магнитного поля;
обучению ядра свертки, содержащего данные о по меньшей мере части МР-информации, полученной без использования градиента магнитного поля, причем ядро свертки содержит данные свертки;
итеративной свертке МР-информации, полученной с использованием градиента магнитного поля для по меньшей мере двух из множества кадров изображения упомянутого по меньшей мере одного набора многокадрового изображения, обученным ядром свертки с формированием синтетических данных k-пространства для каждого соответствующего кадра из упомянутых по меньшей мере двух кадров изображения для коррекции ошибок, связанных с движением, при этом синтетические данные k-пространства формируют при обеспечении согласования данных между по меньшей мере двумя из множества кадров изображения во время итеративной свертки;
проецированию синтетических данных k-пространства для упомянутых по меньшей мере двух из множества кадров изображения в пространство изображения; и
усреднению спроецированных синтетических данных k-пространства, которые спроецированы в пространство изображения, с формированием информации изображения для дисплея.
8. Способ по п. 7, при этом способ дополнительно содержит действие по поддержанию данных ядра свертки постоянными при выполнении итеративной свертки для соответствующего многокадрового набора.
9. Способ по п. 7, при этом способ дополнительно содержит действие по фиксации данных ядра свертки с тем, чтобы сформировать согласованную корреляцию во время итеративной свертки для упомянутого по меньшей мере одного набора многокадрового изображения.
10. Способ по п. 7, в котором синтетические данные k-пространства формируют ряд наборов кадров (Ns) синтетических данных k-пространства.
11. Способ по п. 7, в котором действие по усреднению дополнительно содержит усреднение величин синтетических данных k-пространства для упомянутых по меньшей мере двух кадров упомянутого по меньшей мере одного набора многокадрового изображения.
12. Способ по п. 7, при этом способ дополнительно содержит действие по визуализации сформированной информации изображения на дисплее.
13. Считываемый компьютером невременный носитель, хранящий программное обеспечение, выполненное с возможностью управления системой магнитно-резонансной (МР) томографии для:
выполнения процесса захвата многокадрового изображения с захватом МР-информации для по меньшей мере одного набора многокадрового изображения, содержащего множество кадров изображения, каждый из которых содержит соответствующие данные, причем по меньшей мере часть МР-информации является получаемой с использованием градиента магнитного поля, а по меньшей мере другая часть МР-информации является получаемой без использования градиента магнитного поля;
обучения ядра свертки, содержащего данные о по меньшей мере части МР-информации, полученной без использования градиента магнитного поля, причем ядро свертки содержит данные свертки;
итеративной свертки МР-информации, полученной с использованием градиента магнитного поля для по меньшей мере двух из множества кадров изображения упомянутого по меньшей мере одного набора многокадрового изображения, обученным ядром свертки с формированием синтетических данных k-пространства для каждого соответствующего кадра из упомянутых по меньшей мере двух кадров изображения для коррекции ошибок, связанных с движением, при этом синтетические данные k-пространства формируют при обеспечении согласования данных между по меньшей мере двумя из множества кадров изображения во время итеративной свертки;
проецирования синтетических данных k-пространства для упомянутых по меньшей мере двух кадров изображения из множества кадров изображения упомянутого по меньшей мере одного набора многокадрового изображения в пространство изображения; и
усреднения спроецированных синтетических данных k-пространства, которые спроецированы в пространство изображения, с формированием информации изображения.
14. Носитель по п. 13, при этом данные ядра свертки поддерживаются постоянными при выполнении итеративной свертки для соответствующего многокадрового набора.
15. Носитель по п. 13, при этом данные ядра свертки фиксируются с тем, чтобы сформировать согласованную корреляцию во время итеративной свертки для упомянутого по меньшей мере одного набора многокадрового изображения и/или во время усреднения усреднить величины синтетических данных k-пространства для упомянутых по меньшей мере двух кадров упомянутого по меньшей мере одного набора многокадрового изображения.
16. Носитель по п. 13, при этом во время усреднения усредняются величины синтетических данных k-пространства для упомянутых по меньшей мере двух кадров упомянутого по меньшей мере одного набора многокадрового изображения.
17. Носитель по п. 13, при этом сформированная информация изображения дополнительно визуализируется на дисплее.
| US 6853191 B1, 08.02.2005 | |||
| US 2009284257 A1, 19.11.2009 | |||
| US 2013028538 A1, 31.01.2013 | |||
| US 5828718 A, 27.10.1998 | |||
| RU 2008144002 A, 20.05.2010. |

