ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к магнитно-резонансной томографии, в частности к магнитно-резонансной томографии в присутствии ложных РЧ (радиочастотных) сигналов.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Большое статическое магнитное поле используют в сканерах для магнитно-резонансной томографии (МРТ-сканерах), чтобы ориентировать ядерные спины атомов в рамках процедуры создания изображений внутренней области тела пациента. Данное большое статическое магнитное поле именуется полем B0 или основным магнитным полем.
Во время МРТ-сканирования, радиочастотные (РЧ) импульсы, генерируемые передающей катушкой, вызывают возмущения локального магнитного поля, и РЧ сигналы, испускаемые ядерными спинами, обнаруживаются приемной катушкой. Упомянутые РЧ сигналы используются для построения МРТ-изображений. Упомянутые катушки можно также называть антеннами. Кроме того, передающая и приемная катушки могут быть также встроены в одну приемопередающую катушку, которая выполняет обе функции. Следует понимать, что применение термина приемопередающая катушка относится также к системам, в которых используются отдельные приемные и передающие катушки. Излучаемое РЧ поле называется полем B1.
Однако, ложный РЧ шум во время МРТ-сканирования может создавать помехи измерению РЧ сигналов, испускаемых ядерными спинами. Обычно, вокруг МРТ-системы создается большое РЧ сетчатое ограждение, чтобы исключить упомянутые ложные РЧ сигналы. Недостаток применения упомянутого РЧ сетчатого ограждения состоит в том, что данное ограждение использует большие количества такого металла, как медь, и дорого обходится при изготовлении.
Патент США US 4,613,802 раскрывает помещение, экранированное от радиочастот, для системы магнитно-резонансной томографии.
Патент США US 7,486,982 B2 раскрывает непроницаемый для излучения держатель в комбинации с непрозрачными для излучения компонентами магнита для формирования РЧ экрана вокруг пациента, проходящего МРТ-процедуру.
Международная заявка WO 2013/016639 раскрывает активную систему подавления шума в портативной магнитно-резонансной (МР-) системе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение предусматривает систему, способ и компьютерный программный продукт для магнитно-резонансной томографии в независимых пунктах формулы изобретения. Варианты осуществления представлены в зависимых пунктах формулы изобретения.
Как должно быть очевидно специалисту в данной области техники, аспекты настоящего изобретения можно осуществить в виде устройства, способа или компьютерного программного продукта. Соответственно, аспекты настоящего изобретения могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включающего микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.п.) или варианта осуществления, объединяющего аспекты программного и аппаратного обеспечения, которые могут называться, в общем, в настоящей заявке «схемой», «модулем» или «системой». Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, осуществленного на одном или более компьютерно-читаемых носителях, содержащих компьютерно-выполняемый код, реализованный на упомянутых носителях.
Возможно использование любой комбинации одного или более компьютерно-читаемых носителей. Компьютерно-читаемый носитель может быть компьютерно-читаемым носителем сигналов или компьютерно-читаемым носителем данных. Термин «компьютерно-читаемый носитель данных» в контексте настоящей заявки охватывает любой материальный носитель данных, который может хранить команды, которые могут выполняться процессором компьютерного устройства. Компьютерно-читаемый носитель данных может называться долговременным носителем данных. Компьютерно-читаемый носитель данных может также называться материальным компьютерно-читаемым носителем. В некоторых вариантах осуществления компьютерно-читаемый носитель данных может также хранить данные, выборка которых может выполняться процессором компьютерного устройства. Примеры компьютерно-читаемых носителей данных включают в себя, но без ограничения: гибкий диск, накопитель на жестких магнитных дисках, полупроводниковый жесткий диск, флэш-память, USB-флэш-накопитель, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск и набор регистров процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и цифровые универсальные диски (DVD), например, диски CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин компьютерно-читаемых носителей данных относится также к различным типам носителей записи, допускающих выборку компьютерным устройством по сети или каналу связи. Например, данные могут выбираться посредством модема, по сети Интернет или по локальной сети. Компьютерно-выполняемый код, содержащийся на компьютерно-читаемом носителе, может передаваться с использованием любой подходящей среды, включая, но без ограничения, беспроводные средства, проводную линию, волоконно-оптический кабель, РЧ средства и т.п. или любую подходящую комбинацию вышеперечисленных технологий.
Компьютерно-читаемый носитель сигналов может включать в себя передаваемый информационный сигнал с компьютерно-выполняемым кодом, вложенным в упомянутый сигнал, например, в основной полосе частот или в виде части несущей волны. Данный передаваемый сигнал может иметь любую из множества различных форм, включая, но без ограничения, электромагнитную, оптическую или их любую подходящую комбинацию. Компьютерно-читаемый носитель сигналов может быть любым компьютерно-читаемым носителем, который не является компьютерно-читаемым носителем данных, и который может передавать, распространять или транспортировать программу для использования системой или устройством выполнения команд или в связи с данными системой, устройством или установкой.
«Компьютерная память» или «память» является примером компьютерно-читаемого носителя данных. Компьютерная память является любой памятью, которая может непосредственно выбираться процессором. «Компьютерное запоминающее устройство» или «запоминающее устройство» является дополнительным примером компьютерно-читаемого носителя данных. Компьютерное запоминающее устройство является любым энергонезависимым компьютерно-читаемым носителем данных. В некоторых вариантах осуществления компьютерное запоминающее устройство может быть также компьютерной памятью или наоборот. Содержимое памяти и запоминающего устройства может дублировать друг друга, или элементы, изображенные находящимися в каком-то одном из них, могут храниться или копироваться в другом.
Термин «процессор» в контексте настоящей заявки включает в себя электронный компонент, который способен выполнять программу или машинно-выполняемую команду, или компьютерно-выполняемый код. Ссылки на компьютерное устройство, содержащее «процессор», следует интерпретировать как возможно содержащее, по меньшей мере, два процессора или процессорное ядро. Процессор может быть, например, многоядерным процессором. Термин процессор может также означать набор процессоров внутри одной компьютерной системы или распределенных по нескольким компьютерным системам. Термин компьютерное устройство следует также интерпретировать как, возможно, относящийся к набору или сети компьютерных устройств, содержащих, каждое, процессор или процессоры. Компьютерно-выполняемый код может выполняться несколькими процессорами, которые могут находиться в одном компьютерном устройстве, или которые могут быть даже распределены по нескольким компьютерным устройствам.
Компьютерно-выполняемый код может содержать машинно-выполняемые команды или программу, которая предписывает процессору выполнять аспект настоящего изобретения. Компьютерно-выполняемый код для выполнения операций аспекта настоящего изобретения может быть записан в любой комбинации одного или более языков программирования, включая объектно-ориентированный язык программирования, например, Java, Smalltalk, C++ или подобный язык и обычные языки процедурного программирования, например, языке программирования «C» или подобные языки программирования, и транслирован в машинно-выполняемые команды. В некоторых случаях, компьютерно-выполняемый код может быть в форме высокоуровневого языка или в предварительно компилированной форме т может применяться в сочетании с интерпретатором, который генерирует машинно-выполняемые команды по ходу работы.
Компьютерно-выполняемый код может выполняться только в компьютере пользователя, частично в компьютере пользователя, в виде независимого пакета программного обеспечения, частично в компьютере пользователя и частично в удаленном компьютере или только в удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть соединен с компьютером пользователя по сети любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), или соединение с внешним компьютером может быть выполнено (например, по сети Интернет, через провайдера Интернет-сервисов).
Аспекты настоящего изобретения описаны со ссылкой на блок-схемы последовательностей операций способа, изображения и/или блок-схемы способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления изобретения. Следует понимать, что каждый блок или участок блоков блок-схем последовательностей операций способа, изображений и/или блок-схем может быть реализован командами компьютерной программы в форме компьютерно-выполняемого кода, где применимо. Дополнительно следует понимать, что, в отсутствие взаимного исключения, можно объединять комбинации из блоков на разных блок-схемах последовательностей операций, изображениях и/или блок-схемах. Упомянутые команды компьютерных программ могут подаваться в процессор универсального компьютера, специализированного компьютера или другого программируемого устройства обработки данных, чтобы образовать платформу с таким расчетом, чтобы команды, при выполнении процессором компьютера или другим программируемым устройством обработки данных, создали средство для реализации функций/действий, заданных в блок-схеме последовательности операций и/или блоке или блоках блок-схемы.
Упомянутые команды компьютерной программы могут также храниться на компьютерно-читаемом носителе, который может назначать компьютеру, другому программируемому устройству обработки данных или другим устройствам задание функционировать определенным образом, чтобы команды, хранящиеся на компьютерно-читаемом носителе, образовали изделие, включающее в себя команды, которые реализуют функцию/действие, заданные на блок-схеме последовательности операций и/или блоком или блоками блок-схемы.
Команды компьютерной программы могут также загружаться в компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы предписать выполнение последовательности операционных этапов в компьютере, другом программируемом устройстве обработки данных или других устройствах для образования компьютерно-реализуемого процесса с таким расчетом, чтобы команды, которые выполняются в компьютере или другом программируемом устройстве обработки данных, обеспечивали процессы для реализации функций/действий, заданных на блок-схеме последовательности операций и/или блоком или блоками блок-схемы.
«Пользовательский интерфейс» в контексте настоящей заявки является интерфейсом, который дает возможность пользователю или оператору взаимодействовать с компьютерной или компьютерной системой. «Пользовательский интерфейс» может также называться «человеко-машинным интерфейсом». Пользовательский интерфейс может предоставлять информацию или данные для оператора и/или принимать информацию или данные от оператора. Пользовательский интерфейс может допускать прием операторского ввода компьютером и может обеспечивать вывод для пользователя из компьютера. Другими словами, пользовательский интерфейс может позволять оператору управлять или манипулировать компьютером, и интерфейс может позволять компьютеру показывать результаты операторского управления или манипулирования. Отображение данных или информации на дисплее или графическом пользовательском интерфейсе является примером представления информации для оператора. Прием данных с помощью клавиатуры, мыши, трекбола, сенсорной панели, ручки координатно-указательного устройства, графического планшета, джойстика, веб-камеры, гарнитуры, педалей, снабженной проводами перчатки, удаленного устройства управления и акселерометра дает примеры компонентов пользовательского интерфейса, которые допускают прием информации или данных от оператора.
«Аппаратный интерфейс» в контексте настоящей заявки является интерфейсом, который позволяет процессору компьютерной системы взаимодействовать с и/или управлять внешней компьютерной установкой и/или устройством. Аппаратный интерфейс может предоставлять процессору возможность посылать управляющие сигналы или команды во внешнюю компьютерную установку и/или устройство. Аппаратный интерфейс может также предоставлять процессору возможность обмениваться данными с внешней компьютерной установкой и/или устройством. Примеры аппаратного интерфейса включают в себя, но без ограничения: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение Bluetooth, беспроводное соединение локальной сети, соединение по протоколу TCP/IP, соединение сети Ethernet, интерфейс управляющего напряжения, интерфейс MIDI (цифровой интерфейс музыкальных инструментов), интерфейс аналоговых ввода и интерфейс цифрового ввода.
Термин «дисплей» или «устройство отображения» в контексте настоящей заявки включает в себя устройство вывода или пользовательский интерфейс, адаптированный для отображения изображений или данных. Дисплей может выводить визуальные, аудио и/или тактильные данные. Примеры дисплея включают в себя, но без ограничения: компьютерный монитор, телевизионный экран, сенсорный экран, тактильный электронный дисплей, экран Брайля, электроннолучевую трубку (ЭЛТ), запоминающую электроннолучевую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоскопанельный дисплей, вакуумный люминесцентный дисплей (ВЛД), дисплей на светодиодах (LED), электролюминесцентный дисплей (ЭЛД), плазменные дисплейные панели (ПДП), жидкокристаллический дисплей (LCD), дисплей на органических светодиодах (OLED), проектор и нашлемный дисплей.
Магнитно-резонансные (МР) данные определяются в настоящей заявке как данные измерений радиочастотных сигналов, испускаемых атомными спинами, записанные антенной магнитно-резонансного устройства во время сканирования магнитно-резонансной томографии. Магнитно-резонансные данные являются примером данных медицинского изображения. Изображение магнитно-резонансной томографии (МРТ-изображение) определяются в настоящей заявке как реконструированная двух- или трехмерная визуализация анатомических данных, содержащихся в данных магнитно-резонансной томографии. Упомянутая визуализация может выполняться с помощью компьютера. Магнитно-резонансные данные могут также называться данными k-пространства.
В одном аспекте изобретение предусматривает систему магнитно-резонансной томографии для сбора магнитно-резонансных данных из зоны визуализации. Система магнитно-резонансной томографии содержит магнит для формирования основного магнитного поля в зоне визуализации. Система магнитно-резонансной томографии дополнительно содержит радиочастотную систему, содержащую магнитно-резонансную антенну для посылки и приема радиочастотных излучений в предварительно заданной полосе частот. Магнитно-резонансная антенна содержит, по меньшей мере, один антенный элемент. По меньшей мере, один антенный элемент находится в зоне визуализации. Система магнитно-резонансной томографии дополнительно содержит, по меньшей мере, одну катушку обнаружения РЧ шума для обнаружения радиочастотных сигналов в предварительно заданной полосе частот. Катушка обнаружения РЧ шума может также называться анализирующей катушкой или элементом РЧ-анализа в настоящей заявке. По меньшей мере, одна катушка обнаружения РЧ шума расположена за пределами зоны визуализации.
Система магнитно-резонансной томографии дополнительно содержит память, содержащую машинно-выполняемые команды, например, для выполнения процессором. Память дополнительно содержит данные импульсной последовательности. Данные импульсной последовательности в контексте настоящей заявки включают в себя данные, которые могут использоваться процессором, чтобы управлять системой магнитно-резонансной томографии для выполнения протокола магнитно-резонансной томографии. Другими словами, данные импульсной последовательности являются последовательностью команд, которые процессор может выдавать в систему магнитно-резонансной томографии, которая управляет данной системой для сбора магнитно-резонансных данных. Система магнитно-резонансной томографии дополнительно содержит процессор для управления системой магнитно-резонансной томографии. Выполнение машинно-выполняемых команд предписывает процессору собирать магнитно-резонансные данные визуализации посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности. Во время сбора магнитно-резонансных данных визуализации радиочастотной системой включаются радиочастотные возбуждения. Данный подход является нормальным способом сбора магнитно-резонансных данных.
Выполнение команд дополнительно предписывает процессору собирать радиочастотные данные шума с использованием, по меньшей мере, одной катушки обнаружения РЧ шума. Радиочастотные данные шума собираются одновременно с магнитно-резонансными данными визуализации. В то время, как радиочастотная антенна используется при сборе магнитно-резонансных данных, по меньшей мере, одна катушка обнаружения РЧ шума используется для выполнения измерений, которые используются для определения шума в конкретный момент времени.
Выполнение машинно-выполняемых команд дополнительно предписывает процессору собирать калибровочные магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности в то время, когда выключено радиочастотное возбуждение радиочастотной системы. Выполнение машинно-выполняемых команд дополнительно предписывает процессору собирать опорные радиочастотные данные с использованием, по меньшей мере, одной катушки обнаружения РЧ шума, при этом опорные радиочастотные данные собираются одновременно с калибровочными магнитно-резонансными данными. Калибровочные магнитно-резонансные данные и опорные радиочастотные данные собираются в одно и то же время. Поскольку радиочастотное возбуждение, которое обычно определяется в импульсной последовательности, было выключено, то как калибровочные магнитно-резонансные данные, так и опорные радиочастотные данные являются только данными измерений шума. Измерение шума с использованием катушки обнаружения в одно время с измерением шума с использованием магнитно-резонансной антенны дает возможность создания отображения или калибровки с использованием упомянутых двух наборов данных.
В другом варианте осуществления выполнение машинно-выполняемых команд дополнительно предписывает процессору генерировать скорректированные магнитно-резонансные данные визуализации с использованием радиочастотных данных шума, радиочастотные данные шума и калибровку шума. Скорректированные магнитно-резонансные данные визуализации можно использовать, например, для реконструкции магнитно-резонансного изображения.
В другом варианте осуществления выполнение машинно-выполняемые команды дополнительно предписывают процессору вычислять калибровку шума с использованием опорных радиочастотных данных и калибровочных магнитно-резонансных данных. Данный вариант осуществления может быть полезен потому, что вычисляется калибровка шума, которую можно сравнивать с радиочастотными данными шума для оценки уровня шума в магнитно-резонансных данных визуализации или даже для коррекции магнитно-резонансных данных визуализации. Следует понимать, что магнитно-резонансные данные визуализации или калибровочные магнитно-резонансные данные могут собираться в первую очередь. Калибровка шума может создаваться до того, как собираются магнитно-резонансные данные визуализации, или упомянутая калибровка может также создаваться после того, как собираются магнитно-резонансные данные визуализации.
В другом варианте осуществления калибровка шума является частотно-зависимой, фазозависимой и амплитудно-зависимой. Выполнение машинно-выполняемых команд дополнительно предписывает процессору обнаруживать одно или более событий радиочастотного шума с использованием радиочастотных данных шума. Выполнение команд дополнительно предписывает процессору определять фазу шумового события, частоту шумового события и амплитуду шумового события для каждого из одного или более РЧ шумовых событий. Выполнение команд дополнительно предписывает процессору корректировать каждое из РЧ шумовых событий в магнитно-резонансных данных визуализации с использованием калибровки шума и фазы шумового события, частоты шумового события и амплитуды шумового события.
Калибровка шума может создаваться, например, посредством исследования калибровочных магнитно-резонансных данных и их сравнения с опорными радиочастотными данными. Например, события с амплитудой выше некоторой амплитуды в калибровочных магнитно-резонансных данных шума или опорных радиочастотных данных можно классифицировать как шум, и тогда можно сравнивать сигнал в опорных радиочастотных данных и опорные радиочастотные данные. Например, это можно использовать для генерации или вычисления отображения, связывающего фазу и амплитуду шумового события, измеренного антенным элементом, с фазой и амплитудой шумового события, измеренного на катушке обнаружения РЧ шума. Это допускает отображение между частотой, фазой и амплитудой. Маловероятно, чтобы как в катушке обнаружения РЧ шума, так и в антенном элементе присутствовала разность частот для одного и того же шумового события. Однако, если разность частот присутствует, то данное отображение также можно составить. Сравнение данных, измеренных на катушке обнаружения РЧ шума и антенном элементе, для конкретной частоты сигнала с конкретной частотой, фазой и амплитудой допускает создание прямого отображения.
Если опорные радиочастотные данные измеряются в течение достаточно длительного времени, то можно создать достаточно полное отображение или калибровку шума. Например, шумовое событие можно измерить в радиочастотных данных шума, и затем, с использованием калибровки шума, можно вычислить отображение на антенные элементы. Затем шумовые данные можно вычитать несколькими разными способами из магнитно-резонансных данных визуализации.
Определение калибровки шума может допускать определение шумового сигнала, измеренного одним или более антенными элементами во время сбора магнитно-резонансных данных посредством обнаружения шума, измеренного катушкой обнаружения РЧ шума. Таким образом, любую составляющую шума в фактических магнитно-резонансных данных можно вычесть из магнитно-резонансных данных с использованием отображения и измеренных сигналов из катушки обнаружения РЧ шума.
В другом варианте осуществления калибровка шума вычисляется посредством определения зависящего от частоты отображения, которое описывает данные измерений фазы и амплитуды, выполненных с помощью, по меньшей мере, одной катушки обнаружения РЧ шума и каждого из, по меньшей мере, одного антенного элемента. Это может допускать коррекцию шума на каждом из, по меньшей мере, одного антенного элемента.
Следует отметить, что в данном случае возможно также несколько катушек обнаружения РЧ шума. В данном случае, может быть создана калибровка для каждой катушки обнаружения РЧ шума и ее отображение на каждый из, по меньшей мере, одного антенного элемента. При использовании нескольких катушек обнаружения РЧ шума можно применить множество различных схем. Например, шум, который вычисляет каждая схема, можно усреднять для каждой из катушек обнаружения РЧ шума.
В другом варианте осуществления каждое из РЧ шумовых событий корректируется посредством: вычисления зависящего от времени шумового сигнала для каждого из, по меньшей мере, одного антенного элемента с использованием калибровки шума и фазы шумового события, частоты шумового события и амплитуды шумового события и вычитания зависящего от времени шумового сигнала из магнитно-резонансных данных визуализации. Данный вариант осуществления может представлять преимущество вычисления шумового сигнала на каждом из, по меньшей мере, одного антенного элемента непосредственным и простым способом.
В другом варианте осуществления вычитание зависящего от времени шумового сигнала из магнитно-резонансных данных визуализации выполняется в k-пространстве. Измерения для получения магнитно-резонансных данных измеряют сигнал магнитно-резонансной томографии в k-пространстве. Корректировки можно выполнять непосредственно в k-пространстве.
В другом варианте осуществления выполнение команд дополнительно предписывает процессору вычитать зависящий от времени шумовой сигнал из магнитно-резонансных данных визуализации посредством преобразования магнитно-резонансных данных визуализации в предварительное магнитно-резонансное изображение, преобразования зависящего от времени шумового сигнала в изображение шума и вычисления окончательного магнитно-резонансного изображения посредством вычитания изображения шума из предварительного магнитно-резонансного изображения. Интенсивность или значение вокселя в магнитно-резонансном изображении пропорциональна МР сигналу. Вклад в шум конкретного шумового сигнала также пропорционален интенсивности шума. Поэтому шум может исключаться после того, как изображения реконструированы посредством их вычитания.
В другом варианте осуществления одно или более РЧ шумовых событий определяется посредством задания порога опорных радиочастотных данных. Данный вариант осуществления может быть полезен потому, что он исключает вычитание низких уровней шума, которые может быть сложно компенсировать. Данный вариант осуществления предусматривает средство исключения ложного радиочастотного излучения из магнитно-резонансных данных визуализации.
В другом варианте осуществления система магнитно-резонансной томографии может использовать цифровой фильтр для исключения шумового сигнала из магнитно-резонансных данных визуализации. Например, вычисление шума можно использовать для построения цифрового фильтра, который использует магнитно-резонансные данные визуализации и радиочастотные данные шума в качестве входных данных. В таком случае, выходные данные цифрового фильтра являются магнитно-резонансными данными визуализации после вычитания из них шума.
В то время, как исключение шума может выполняться полностью в области изображения, процесс сбора данных в современной МРТ-системе включает в себя оцифровку МРТ-сигнала с частотой дискретизации, значительно более высокой, чем ширина полосы частот информации, которую содержит упомянутый сигнал. Демодуляция и субдискретизация оцифрованного МРТ-сигнала обычно выполняется в цифровой области с использованием, например, передискретизирующего фильтра для обработки временных данных. В зависимости от сложности источника шума, возможно, удобнее построить специализированный фильтр на основании полученной характеристики шума, которая применяется посредством свертки во временной области в процессе цифровой демодуляции и передискретизации. Данный подход может быть эффективным при подавлении частот с периодическими значениями и постоянного широкополосного шума. В данном варианте осуществления подавление шума будет происходить внутри цифрового приемника МРТ-системы. В таком случае, выходные данные цифрового приемника будут данными без шума. Нижеследующий вариант осуществления описывает данный примерный передискретизирующий фильтр.
В другом варианте осуществления выполнение машинно-выполняемых команд дополнительно предписывает процессору разбивать радиочастотные данные шума на временные кадры шума. В некоторых примерах временные кадры могут продолжаться в течение времени сбора линии k-пространства или нескольких линий k-пространства. Выполнение команд дополнительно предписывает процессору разбивать магнитно-резонансные данные визуализации на временные кадры данных. В данном случае существует временной кадр данных, выбранный из временных кадров данных, который соответствует по времени временному кадру шума, который выбран из временных кадров шума. Другими словами, как магнитно-резонансные данные визуализации, так и радиочастотные данные шума разбиваются на короткие временные интервалы. Каждый из упомянутых коротких временных интервалов называется временным кадром. Радиочастотные данные шума и магнитно-резонансные данные визуализации разбиваются на упомянутые кадры таким образом, чтобы для каждого кадра радиочастотных данных шума в рассматриваемом случае существовал соответствующий кадр магнитно-резонансных данных визуализации. Выполнение команд дополнительно предписывает процессору вычислять спектр шума, измеренный на коротком временном интервале, для каждого из временных кадров шума. Выполнение команд дополнительно предписывает процессору вычислять спектр шума, вычисляемый на коротком временном интервале, для каждого спектра шума, измеренного на коротком временном интервале, с использованием калибровки шума. Каждый из временных кадров шума, например, может иметь свое Фурье-преобразование, выполняемое так, что создается спектр принятых радиочастотных данных. Упомянутое преобразование имеет определение амплитуды и частоты.
Выполнение команд дополнительно предписывает процессору вычислять кратковременный спектр данных (или кратковременное Фурье-преобразование) для каждого из временных кадров данных. Аналогично, Фурье-преобразование каждого временного кадра данных создается так, как создается радиочастотный спектр. Затем, каждый из спектров шума, вычисленных на коротких временных интервалах, сортируется по частотным интервалам шума посредством выполнения команд процессора. Выполнение машинно-выполняемых команд дополнительно предписывает процессору сортировать каждый кратковременный спектр данных по частотным интервалам данных. Интервальная сортировка шума, вычисленного на коротком временном интервале, и кратковременного спектра данных выполняется с использованием идентичных частотных интервалов. После того, как данные как шума, так и измерения разбиты на небольшие временные кадры, и для каждых вычислен спектр, упомянутый спектр разбивается по частотным интервалам. Затем, выполнение машинно-выполняемых команд дополнительно предписывает процессору вычислять скорректированные частотные интервалы данных посредством вычитания частотных интервалов шума из частотных интервалов данных с использованием идентичных частотных интервалов.
Выполнение команд дополнительно предписывает процессору повторно синтезировать магнитно-резонансные данные визуализации с использованием скорректированных частотных интервалов данных и исходного фазового спектра магнитно-резонансных данных визуализации. Данный конкретный метод можно применять после того, как данные собраны, или данный метод может выполняться в процессе работы.
Приведенные операции могут выполняться в цифровом приемнике. Данные операции могут также выполняться в процессе работы, когда измеряются кадры, или могут выполняться после того, как сбор данных закончен.
Вышеописанный цифровой фильтр подобен цифровому фильтру, описанному в работе Hoeldrich и Lorber, «Real-time Broadband Noise Reduction», International Computer Music Conference Proceedings 1998, http://hdl.handle.net/2027/spo.bbp2372.1998.317, с несколькими дополнительными признаками. В настоящем варианте осуществления кратковременный спектр, применяемый для прогнозирования шума, принимается из отдельного источника, катушки обнаружения РЧ шума. Терминология в вышеописанном варианте осуществления согласуется с терминологией, применяемой в трудах упомянутой конференции.
Относительно применения подавления шума в магнитно-резонансной томографии следует отметить, что можно собирать отдельные линии k-пространства и выполнять Фурье-преобразование (ФП) данных отдельных линий. В некоторых примерах, длительность сбора линии или линий k-пространства является такой, что упомянутые линии можно рассматривать непосредственно в качестве отдельных кадров в контексте STFT (кратковременного Фурье-преобразования), описанного в статье авторов Hoeldrich и Lorber.
Преобразование STFT для МРТ можно применять иначе, чем описано в статье авторов Hoeldrich и Lorber. В статье авторов Hoeldrich и Lorber принято допущение о непрерывном потоке временных данных и выполняется Фурье-преобразование (ФП) на выбранном размере окна по мере поступления данных. Таким образом, при том, что размер окна является фиксированным, данные из двух последовательных ФП на окне могут содержать часть одних и тех же данных. Это характерно для выполнения ФП в реальном времени (с использованием метода сложения результатов с перекрытием). Однако, преобразование STFT не обязательно для МРТ-данных, поскольку данные уже собираются как независимо разграниченные или собранные в виде дискретных линий или групп k-пространства. В данном случае, временные кадры являются отдельными кадрами, в которых не используются никакие данные из предыдущих кадров. Остальная часть обработки, описанной в статье авторов Hoeldrich и Lorber в отношении исключения уровня собственных шумов, остается применимой, но преобразование STFT не требуется в случае МРТ.
В другом варианте осуществления выполнение команд дополнительно предписывает процессору реконструировать магнитно-резонансное изображение с использованием магнитно-резонансных данных визуализации после того, как магнитно-резонансные данные визуализации были скорректированы или очищены от шума.
В другом варианте осуществления магнит является цилиндрическим магнитом с туннелем. Магнитно-резонансная антенна является катушкой для тела, расположенной внутри туннеля. По меньшей мере, один антенный элемент расположен внутри туннеля магнита. Данный вариант осуществления может быть полезен потому, что коррекцию шума можно выполнять по данным измерений, собранным катушкой для тела. Катушка для тела в контексте настоящей заявки может также называться катушкой типа птичьей клетки.
В другом варианте осуществления магнитно-резонансная антенна является поверхностной катушкой.
В другом варианте осуществления, по меньшей мере, один антенный элемент является рамочным антенным элементом.
В другом варианте осуществления, по меньшей мере, одна катушка обнаружения РЧ шума является рамочной антенной. Рамочный антенный элемент может иметь, приблизительно такие же площадь поверхности и настройку, как рамочная антенна. Кроме того катушка обнаружения РЧ шума можно установить так, чтобы она была ориентирована, приблизительно, так же, как будут располагаться элемент в поверхностной катушке или антенный элемент в рамочном антенном элементе. Например, антенные элементы могут размещаться сверху субъекта. В данном случае, предпочтительное положение для размещения рамочной антенны катушки обнаружения РЧ шумабудет планарным или горизонтальным.
В другом варианте осуществления предварительно заданная полоса частот находится в пределах от 1 кГц до 1 МГц.
В другом варианте осуществления либо магнитно-резонансные данные визуализации, либо калибровочные магнитно-резонансные данные могут собираться в первую очередь. Способ можно выполнять до того, как выполняется измерение субъекта, или способ можно выполнять после этого.
В другом варианте осуществления выполнение команд дополнительно предписывает процессору формировать магнитно-резонансное изображение с использованием магнитно-резонансных данных визуализации. Данное формирование можно выполнять, например, после того, как шум исключен из магнитно-резонансных данных визуализации.
В другом аспекте изобретение предусматривает компьютерный программный продукт, содержащий машинно-выполняемые команды для выполнения процессором, управляющим системой магнитно-резонансной томографии. Система магнитно-резонансной томографии содержит магнит для формирования основного магнитного поля в зоне визуализации. Система магнитно-резонансной томографии дополнительно содержит радиочастотную систему, содержащую магнитно-резонансную антенну для посылки и приема радиочастотных излучений в предварительно заданной полосе частот. Магнитно-резонансная антенна содержит, по меньшей мере, один антенный элемент. По меньшей мере, один антенный элемент находится в зоне визуализации. Система магнитно-резонансной томографии дополнительно содержит, по меньшей мере, одну катушку обнаружения РЧ шума для обнаружения радиочастотных сигналов в предварительно заданной полосе частот. По меньшей мере, одна катушка обнаружения РЧ шума расположена за пределами зоны визуализации. Система магнитно-резонансной томографии дополнительно содержит память, содержащую данные импульсной последовательности. Выполнение машинно-выполняемых команд предписывает процессору собирать магнитно-резонансные данные визуализации посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности, при включенном радиочастотном возбуждении радиочастотной системы.
Выполнение машинно-выполняемых команд дополнительно предписывает процессору собирать радиочастотные данные шума с использованием, по меньшей мере, одной катушки обнаружения радиочастотного шума. Радиочастотные данные шума собираются одновременно с магнитно-резонансными данными визуализации. Выполнение машинно-выполняемых команд дополнительно предписывает процессору собирать калибровочные магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности. Радиочастотное возбуждение радиочастотной системы выключено во время сбора калибровочных магнитно-резонансных данных. Выполнение машинно-выполняемых команд дополнительно предписывает процессору собирать опорные радиочастотные данные с использованием, по меньшей мере, одной катушки обнаружения РЧ шума. Опорные радиочастотные данные собираются одновременно с калибровочными магнитно-резонансными данными. Выполнение машинно-выполняемых команд дополнительно предписывает процессору вычислять калибровку шума с использованием опорных радиочастотных данных и калибровочных магнитно-резонансных данных.
В другом аспекте изобретение предусматривает способ управления работой системой магнитно-резонансной томографии для сбора магнитно-резонансных данных из зоны визуализации. Система магнитно-резонансной томографии содержит магнит для формирования основного магнитного поля в зоне визуализации. Система магнитно-резонансной томографии дополнительно содержит радиочастотную систему, содержащую магнитно-резонансную антенну для посылки и приема радиочастотных излучений в предварительно заданной полосе частот. Магнитно-резонансная антенна содержит, по меньшей мере, один антенный элемент. По меньшей мере, один антенный элемент находится в зоне визуализации. Система магнитно-резонансной томографии дополнительно содержит, по меньшей мере, одну катушку обнаружения РЧ шума для обнаружения радиочастотных сигналов в предварительно заданной полосе частот. По меньшей мере, одна катушка обнаружения РЧ шума расположена за пределами зоны визуализации.
Способ содержит этап сбора магнитно-резонансных данных визуализации посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности таким образом, что радиочастотное возбуждение радиочастотной системы включено. Способ дополнительно содержит этап сбора радиочастотных данных шума с использованием, по меньшей мере, одной катушки обнаружения РЧ шума. Радиочастотные данные шума собираются одновременно с магнитно-резонансными данными визуализации. Способ дополнительно содержит этап сбора калибровочных магнитно-резонансных данных посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности таким образом, что радиочастотное возбуждение радиочастотной системы выключено. Способ дополнительно содержит этап сбора опорных радиочастотных данных с использованием, по меньшей мере, одной катушки обнаружения РЧ шума. Опорные радиочастотные данные собираются одновременно с калибровочными магнитно-резонансными данными. Способ дополнительно содержит вычисление калибровки шума с использованием опорных радиочастотных данных и калибровочных магнитно-резонансных данных.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В последующем, предпочтительные варианты осуществления изобретения описаны, только для примера, и со ссылкой на чертежи, на которых:
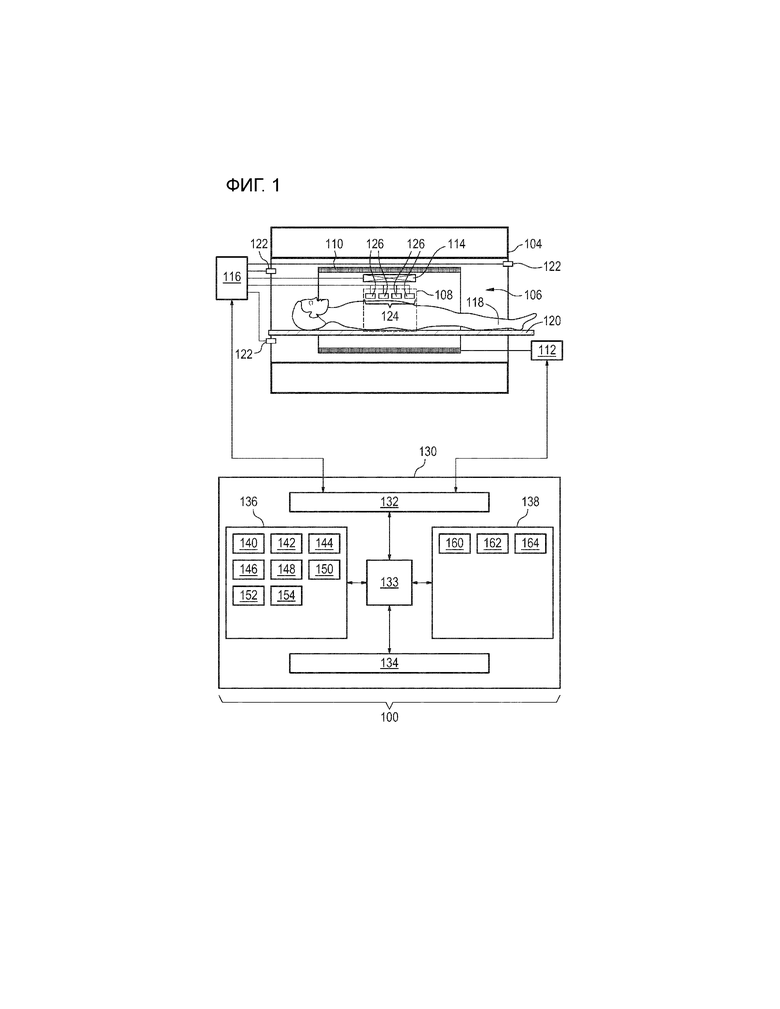
Фиг. 1 - изображение пример системы магнитно-резонансной томографии;
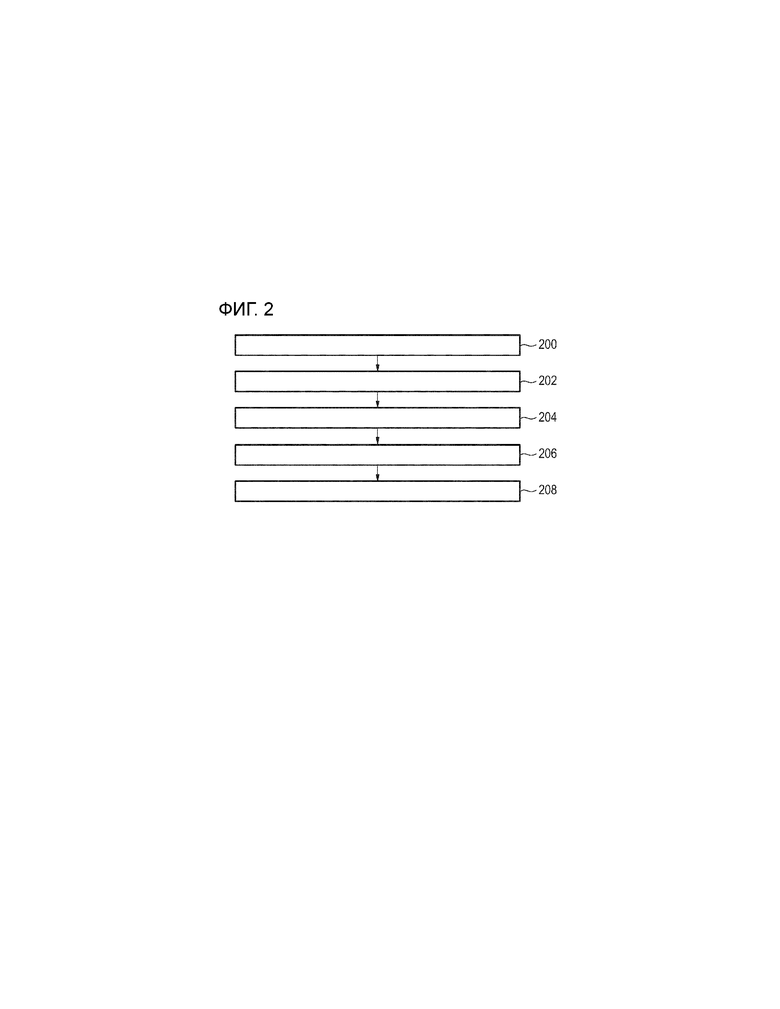
Фиг. 2 - блок-схема последовательности операций, которая поясняет пример способа управления работой системы магнитно-резонансной томографии по п. 1;
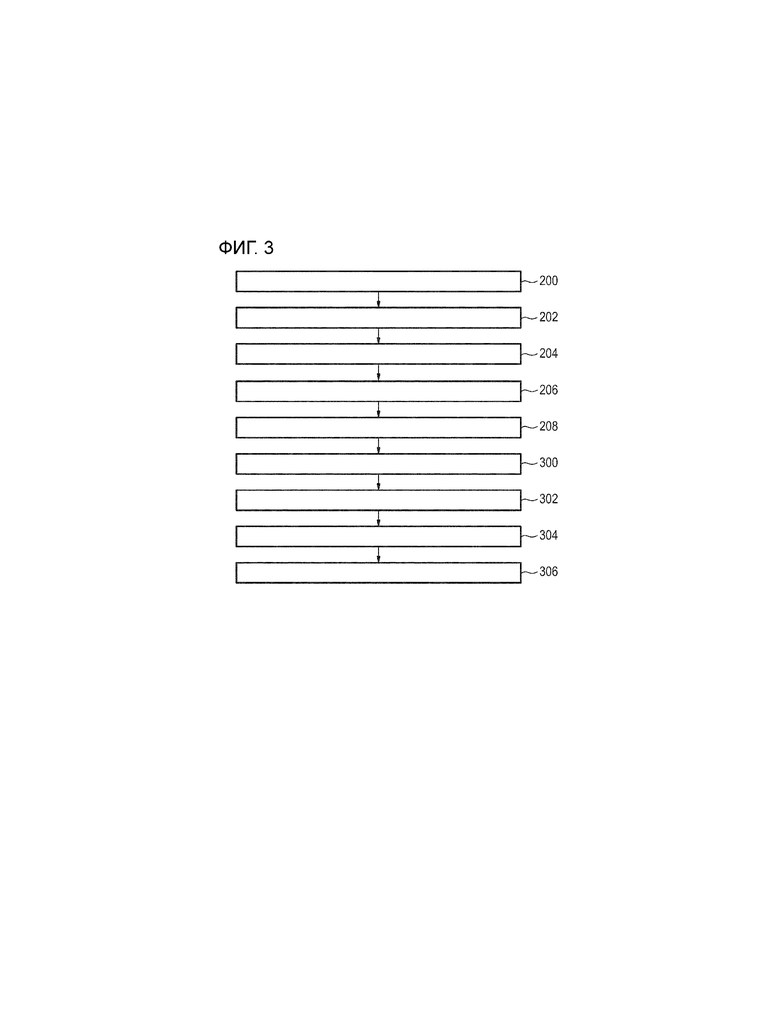
Фиг. 3 - блок-схема последовательности операций, которая поясняет дополнительный пример способа управления работой системы магнитно-резонансной томографии по п. 1;
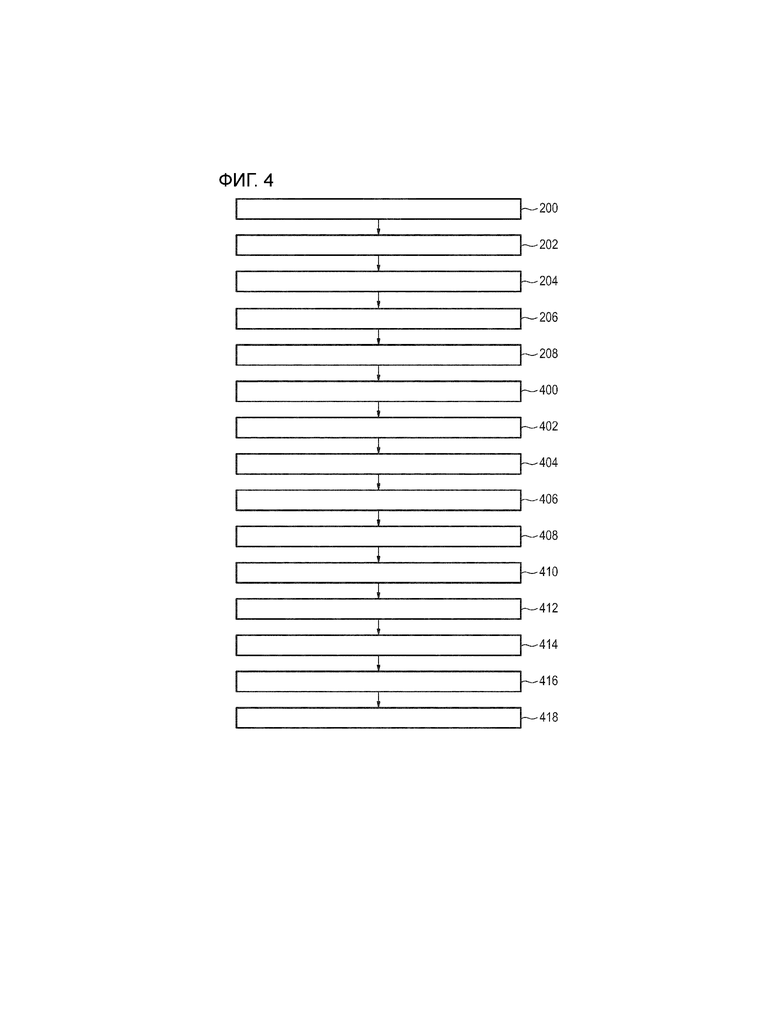
Фиг. 4 - блок-схема последовательности операций, которая поясняет дополнительный пример способа управления работой системы магнитно-резонансной томографии по п. 1;
Фиг. 5 - дополнительный пример системы магнитно-резонансной томографии; и
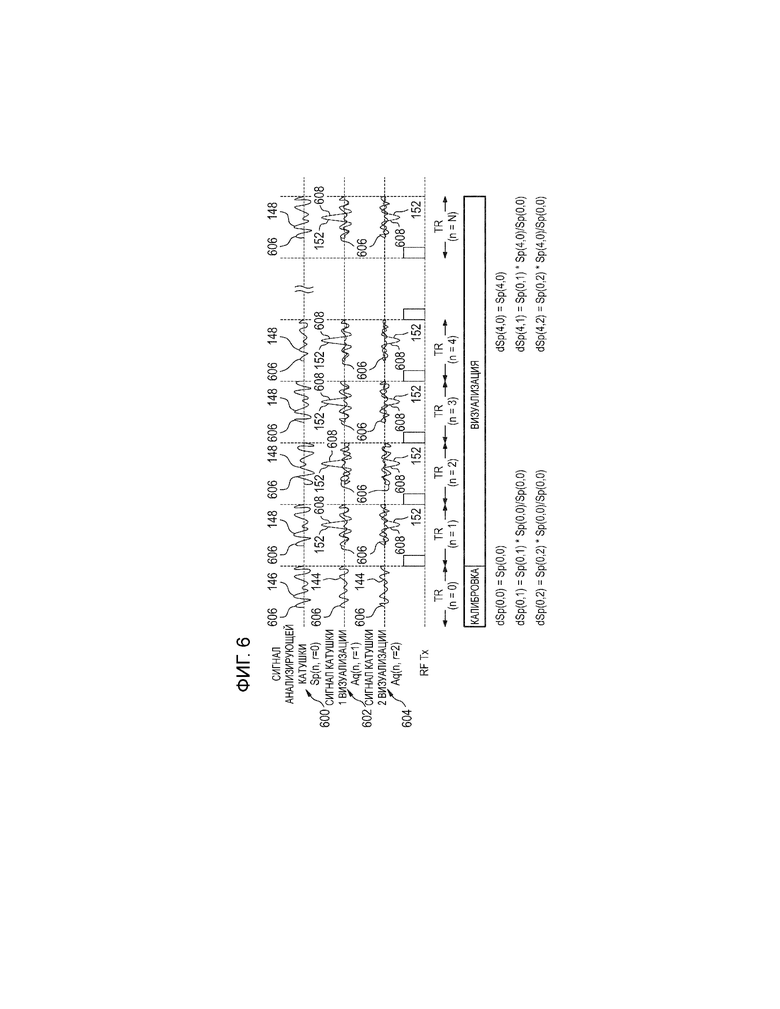
Фиг. 6 - графическое изображение способа, с помощью которого можно устранять вклады различных ложных сигналов в сигналы каждого элемента визуализации.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Элементы, обозначенные сходными числовыми позициями на приведенных чертежах, являются либо эквивалентными элементами или выполняют одинаковые функции. Элементы, которые описаны прежде, не обязательно будут рассматриваться на последующих фигурах, если они имеют эквивалентную функцию.
Фиг. 1 представляет пример системы 100 магнитно-резонансной томографии. Система 100 магнитно-резонансной томографии содержит магнит 104. Магнит 104 сверхпроводящим магнитом 104 цилиндрического типа с туннелем 106, проходящим через него. Возможно также применение магнитов разного типа, например, возможно также применение составного цилиндрического магнита и, так называемого, открытого магнита. Составной цилиндрический магнит аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат разделен на две секции, чтобы обеспечивать доступ к изоплоскости магнита, данные магниты можно применять, например, в сочетании с терапией пучками заряженных частиц. Открытый магнит содержит две секции магнита, одну над другой с пространством между ними, которое является достаточно большим для вмещения субъекта: схема расположения двух-секционной зоны аналогична схемы расположения катушки Гельмгольца. Открытые магниты широко распространены потому, что меньше ограничивают субъекта. Внутри криостата цилиндрического магнита находится группа сверхпроводящих катушек. Внутри туннеля 106 цилиндрического магнита 104 находится зона 108 визуализации, в которой магнитное поле является сильным и достаточно однородным для выполнения магнитно-резонансной томографии.
В туннеле 106 магнита находится также набор градиентных магнитных катушек 110, которые служат для сбора магнитно-резонансных данных, чтобы пространственно кодировать магнитные спины в зоне 108 визуализации магнита 104. Градиентные магнитные катушки 110, подключены к источнику 112 питания градиентных магнитных катушек. Предполагается, что градиентные магнитные катушки 110 являются репрезентативными. Обычно, градиентные магнитные катушки 110 содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник питания градиентных магнитных катушек подает ток в градиентные магнитные катушки. Ток, подаваемый в градиентные магнитные катушки 110, подается с управлением в зависимости от времени и может изменяться линейно или импульсно. Опора 120 субъекта поддерживает субъекта 118 в зоне 108 визуализации.
В туннеле 106 магнита 104 находится катушка 114 для тела. Катушка 114 для тела может квадратурной катушкой для тела (QBC). Катушка 114 для тела показана подсоединенной к приемопередатчику 116. В некоторых вариантах осуществления катушка 114 для тела может быть также подсоединена к радиочастотному усилителю и/или приемнику катушки для всего тела, однако, данный вариант не показан в приведенном примере. Если с катушкой 114 для всего тела соединены как передатчик, так и приемник 116, то можно обеспечить средство для переключения между режимами передачи и приема. Например, для выбора режима передачи или приема можно применить схему с pin-диодом.
Приемопередатчик 116 показан подсоединенным к катушке 124 для магнитно-резонансной томографии. В приведенном примере катушка 124 для магнитно-резонансной томографии является поверхностной катушкой, содержащей несколько антенных элементов 126.
Приемопередатчик 116 показан дополнительно соединенным с несколькими катушками обнаружения РЧ шума. Приемопередатчик является многоканальным приемопередатчиком. В некоторых вариантах осуществления приемопередатчик может разделяться на несколько разных блоков. Однако, может быть, полезно применить приемопередатчик 116 с дополнительными каналами для катушек обнаружения РЧ шума, так как собираемые сигналы будут обрабатываться таким же образом, как данные, собираемые с использованием антенн 114, 124.
Приемопередатчик 116 и источник 112 питания градиентных магнитных катушек показаны подсоединенными к аппаратному интерфейсу 132 компьютера 130. Компьютер 130 дополнительно показан содержащим процессор 133, который функционально предназначен для выполнения компьютерно-читаемых команд. Компьютер 130 дополнительно показан содержащим пользовательский интерфейс 134, компьютерное запоминающее устройство 136 и компьютерную память 138, которые допускают выборку процессором 133 и соединены с ним.
Система 100 магнитно-резонансной томографии показана содержащей несколько катушек 122 обнаружения РЧ шума, расположенных внутри или около туннеля 106 системы магнитно-резонансной томографии. Катушки 122 обнаружения РЧ шума размещены в стороне от зоны 108 визуализации. Сигнал, который будут измерять катушки 122 обнаружения РЧ шума, будет преимущественно шумом или внешним РЧ шумом, в отличие от катушки 114 или 124, которая измеряет шум плюс магнитно-резонансные от субъекта 118.
Компьютерное запоминающее устройство 136 показано содержащим данные 140 импульсной последовательности. Компьютерное запоминающее устройство 136 дополнительно показано содержащим магнитно-резонансные данные 142 визуализации, калибровочные магнитно-резонансные данные 144, опорные радиочастотные данные 146 и радиочастотные данные 148 шума. Магнитно-резонансные данные 142 визуализации собирались с использованием данных 140 импульсной последовательности. Радиочастотные данные 148 шума собирались одновременно с магнитно-резонансными данными 142 визуализации. Калибровочные магнитно-резонансные данные 144 собирались также с использованием магнитно-резонансных данных, но радиочастотные возбуждения были выключены. Опорные радиочастотные данные собирались с использованием катушками 122 обнаружения РЧ шума в то же самое время, когда собирались калибровочные магнитно-резонансные данные 144. Компьютерное запоминающее устройство 136 показано дополнительно содержащим калибровку 150 шума, которая вычисляется с использованием калибровочных магнитно-резонансных данных и опорных радиочастотных данных. Компьютерное запоминающее устройство 136 дополнительно показано содержащим скорректированные магнитно-резонансные данные 152 визуализации, из которых шумовой сигнал исключен с использованием калибровки 150 шума, магнитно-резонансные данные 142 визуализации и радиочастотные данные 148 шума. Компьютерное запоминающее устройство 136 дополнительно показано как содержащее магнитно-резонансное изображение 154, которое реконструировано из скорректированных магнитно-резонансных данных 152 визуализации.
Компьютерная память 138 показана содержащей модуль 160 управления. Модуль управления содержит компьютерно-выполняемый код, который позволяет процессору 133 управлять работой и функцией системы 100 магнитно-резонансной томографии. Модуль 160 управления может содержать компьютерно-выполняемый код, который позволяет процессору выполнять любой из способов, представленных на фиг. 2, 3 или 4. Компьютерная память 138 показана как добавочно содержащая модуль 162 реконструкции изображения, который дает возможность процессору 133 реконструировать магнитно-резонансные изображения 154 из магнитно-резонансных данных 152. Компьютерная память 138 дополнительно показана содержащей опциональный модуль 164 цифрового фильтра, который реализует цифровой фильтр, чтобы выполнять исключение шума из магнитно-резонансных данных 142 визуализации для генерации или вычисления скорректированных магнитно-резонансных данных 152 визуализации. Модуль 164 можно вычислить, например, с использованием калибровки 150 шума.
Фиг. 2 представляет блок-схему последовательности операций, которая поясняет пример способа управления работой системы 100 магнитно-резонансной томографии, показанной на фиг. 1. Сначала, на этапе 200 собираются магнитно-резонансные данные 142 визуализации посредством управления системой 100 магнитно-резонансной томографии с помощью данных 140 импульсной последовательности. Радиочастотное возбуждение радиочастотной системы выключено. Затем, на этапе 202 собираются радиочастотные данные 148 шума с использованием катушек 122 обнаружения радиочастотного шума. Данная операция выполняется в то же самое время, когда собираются магнитно-резонансные данные 142 визуализации. Затем, на этапе 204 собираются калибровочные магнитно-резонансные данные 144 посредством управления системой 100 магнитно-резонансной томографии с помощью данных 140 импульсной последовательности.
Во время сбора калибровочных магнитно-резонансных данных 144 радиочастотное возбуждение радиочастотной системы выключено. Далее, на этапе 206 собираются опорные радиочастотные данные 146 с использованием катушек 122 обнаружения РЧ шума. Опорные радиочастотные данные 146 собираются в то же самое время, когда собираются также калибровочные магнитно-резонансные данные 144. Например, на этапе 208 вычисляется калибровка 150 шума с использованием опорных радиочастотных данных 146 и калибровочных магнитно-резонансных данных 144.
Фиг. 3 представляет блок-схему последовательности операций, которая поясняет дополнительный способ управления работой системы магнитно-резонансной томографии, показанной на фиг. 1. Фиг. 3 представляет продолжение способа, показанного на фиг. 2. После этапа 208 способ продолжается на этапе 300, на котором обнаруживаются одно или более РЧ шумовых событий с использованием радиочастотных данных 148 шума. Затем, на этапе 302 определяется фаза шумового события, частота шумового события и амплитуда шумового события для каждого из одного или более РЧ шумовых событий. Затем, на этапе 304 каждое из РЧ шумовых событий в магнитно-резонансных данных 142 визуализации корректируется с использованием калибровки 150 шума и фазы шумового события, частоты шумового события и амплитуды шумового события. Наконец, на этапе 306 магнитно-резонансное изображение 154 реконструируется из скорректированных магнитно-резонансных данных 152 визуализации с использованием модуля 162 реконструкции изображения.
Фиг. 4 представляет блок-схему последовательности операций, которая поясняет дополнительный способ управления работой системы 100 магнитно-резонансной томографии, показанной на фиг. 1. Способ, представленный на фиг. 4, является продолжением способа, представленного на фиг. 2. После этапа 208 способ переходит на этап 400, на котором радиочастотные данные 148 шума разбиваются на временные кадры шума. Затем, на этапе 402 магнитно-резонансные данные 142 визуализации разбиваются на временные кадры данных. В данном случае существует временной кадр данных, выбранный из временных кадров данных, который соответствует по времени временному кадру шума, выбранному из временных кадров шума. Как магнитно-резонансные данные визуализации, так и радиочастотные данные шума разбиваются на одинаковые временные кадры таким образом, чтобы для каждого временного кадра данных существовал временной кадр шума. Затем, на этапе 404 вычисляется спектр шума, измеренный на коротком временном интервале, для каждого из временных кадров шума. Затем, на этапе 406 вычисляется спектр шума, вычисляемый на коротком временном интервале, для каждого спектра шума, измеренного на коротком временном интервале, с использованием калибровки шума. Спектр шума, калиброванный на коротком временном интервале, является вычисленным значением шума на конкретном антенном элементе.
Затем, на этапе 408 вычисляется кратковременный спектр данных для каждого из временных кадров данных. Затем, на этапе 410 каждый спектр шума, вычисляемый на коротком временном интервале, сортируется по частотным интервалам шума. Затем, на этапе 412 каждый кратковременный спектр данных сортируется по частотным интервалам данных. Сортировка шума, вычисленного на коротких временных интервалах, является точно такой же, как сортировка кратковременного спектра данных. Сортировка выполняется с использованием идентичных частотных интервалов. Затем, на этапе 414 вычисляются скорректированные частотные интервалы данных посредством вычитания частотных интервалов шума из частотных интервалов данных с использованием идентичных частотных интервалов. Затем, на этапе 416 повторно синтезируются магнитно-резонансные данные визуализации с использованием скорректированных частотных интервалов данных и исходного фазового спектра магнитно-резонансных данных визуализации. Для каждого временного кадра различные участки частотного спектра реассемблируются посредством повторного объединения частотных интервалов шума. Например, может выполняться Фурье-преобразование. Однако, фаза может быть неточной. Используется фаза исходного магнитно-резонансных данных визуализации. Наконец, на этапе 418 повторно синтезированные магнитно-резонансные данные визуализации реконструируются в магнитно-резонансное изображение 154. Данная операция может выполняться с использованием модуля 162 реконструкции изображения. Операции, описанные на этапах 400-416, могут выполняться, например, модулем 164 цифрового фильтра.
Примеры могут способствовать исключению РЧ сетчатого ограждения посредством предотвращения влиянию помех РЧ сигналов на собранные МРТ-данные, которые будут присутствовать в данных магнитно-резонансной томографии в виде шума. Современная МРТ-система использует много каналов, обычно, больше 8, чтобы принимать МРТ-сигнал из РЧ катушечных элементов, размещенных в непосредственной близости от пациента. Данная непосредственная близость желательна для получения максимального отношения сигнала к шуму (SNR). В отсутствие РЧ сетчатого ограждения, ложные РЧ сигналы могут проникать в туннель МРТ-системы и создавать помехи МРТ-данным. Чтобы исключить вытекающие артефакты, пример предлагает вводить и использовать несколько дополнительных приемных катушечных элементов в фиксированных местоположениях внутри туннеля (или в непосредственной близости от него) МРТ-системы, но за пределами объема визуализации. Упомянутые дополнительные элементы используются для сбора только ложных сигналов синхронно с собираемыми МРТ-данными. Собранные чистые ложные сигналы впоследствии используются для исключения любого искажения МРТ-данных ложными сигналами.
Стандартным признаком установки МРТ-системы является РЧ сетчатое ограждение. РЧ сетчатое ограждение, по существу, является клеткой Фарадея. Для большинства установок характерно, что РЧ сетчатое ограждение формирует защитное ограждение помещения в целом, окружающее большую часть МРТ-системы, включающей в себя магнит и его содержимое и опору для пациента. Типичный МРТ-блок состоит из трех помещений. РЧ-экранированное помещение, содержащее магнит, которое является помещением, в котором сканируют пациента. Техническое помещение, которое содержит различную вспомогательную электронную аппаратуру МРТ-системы, и помещение управления, в котором находятся МРТ-пульт и оператор. РЧ сетчатое ограждение является, обычно, относительно большим защитным ограждением помещения, изготовленным из листовой меди, смонтированным на деревянной раме.
Из-за размера и объема используемой меди, РЧ сетчатое ограждение МРТ-установки является дорогой составной частью установки. Поэтому было бы полезно, если бы можно было использовать альтернативное средство, чтобы исключить потребность в установке МРТ-системы внутри РЧ сетчатого ограждения.
РЧ сетчатое ограждение МРТ-системы служит для достижения двух целей. Во-первых, оно не допускает ложные РЧ сигналы из других источников помимо МРТ-системы, влияние помех на принимаемые МРТ-сигналы. Упомянутые ложные сигналы в полосе частот дискретизированного МРТ-сигнала могут проявляться в виде артефактов или когерентного шума в МР изображении. Упомянутые сигналы могут испортить качество изображения, скрыть анатомические признаки или проявляться как патология. Во-вторых, упомянутое ограждение предотвращает утечку РЧ энергии, передаваемой МРТ-системой в окружающую среду и ее возмущение.
Примеры могут относиться к полному исключению РЧ сетчатого ограждения и сосредоточены на предотвращении влияния помех ложных РЧ сигналов на собранные МРТ-данные. Современная МРТ-система использует много каналов, обычно, больше 8, чтобы принимать МРТ-сигнал из РС катушечных элементов, размещенных в непосредственной близости от пациента. Данная непосредственная близость желательна для получения максимального отношения сигнала к шуму (SNR). В отсутствие РЧ сетчатого ограждения, ложные РЧ сигналы могут проникать в туннель МРТ-системы и создавать помехи МРТ-данным. Если существуют ложные РЧ сигналы, попадающие в туннель МРТ-системы во время приема сигнала, и данные ложные РЧ сигналы находятся в полосе частот МРТ-сигнала, то РЧ катушечные элементы также будут обнаруживать нежелательный ложный сигнал, который будет обычно добавляться к требуемому МРТ-сигналу. Полученное изображение будет содержать артефакты. Чтобы исключить упомянутые артефакты, примеры могут предлагать и использовать несколько дополнительных приемных катушечных элементов в фиксированных местоположениях в туннели МРТ-системы, но за пределами объема визуализации. Упомянутые элементы называются элементами РЧ анализа (катушками обнаружения РЧ шума) (смотри фиг. 5).
Фиг. 5 представляет дополнительный пример системы 100 магнитно-резонансной томографии. Пример, показанный на фиг. 5, аналогичен примеру, показанному на фиг. 1, однако, схема на фиг. 5 отражает некоторые дополнительные признаки, не показанные на фиг. 1. В частности, катушки 122 обнаружения РЧ шума показаны содержащими предусилители 500, которые подсоединены к системе сбора цифровых данных. Антенна 124 также содержит предусилитель 500, соединенный с его антенными элементами 126. Упомянутый усилитель подсоединен также к системе сбора цифровых данных или радиочастотной системе. Система 100 магнитно-резонансной томографии, показанная на фиг. 5, содержит катушки 122 обнаружения РЧ шума, и способы, изображенные на фиг. 2-4, могут выполняться с использованием данной системы, чтобы подавлять шум, вызываемый ложными РЧ сигналами. Данное решение может уменьшать потребность в РЧ экранировании системы 100 магнитно-резонансной томографии.
Упомянутые дополнительные фиксированные элементы могут включать в себя специализированные приемные каналы, которые работают аналогично каналам катушечных элементов, размещаемых на пациенте. Каналы могут быть подсоединены к система сбора данных (DAS) и сконфигурированы идентичным образом в соответствии с требованиями каждого протокола сканирования. Каждый раз, когда МРТ-данные собираются в рамках получения изображения, сигнал из элементов анализа (катушек 122 обнаружения РЧ шума) также собирается с использованием идентичных полосы частот дискретизации и фильтрации, как при сборе элементов визуализации. Поскольку элементы анализа (катушки 122 обнаружения РЧ шума) не воспринимают МРТ-сигнал, то данные, которые они собирают, будут содержать только тепловой шум и какой-либо ложный РЧ сигнал. Элементы визуализации будут содержать МРТ-сигнал с наложенным поверх него ложным сигналом.
Хотя основное назначение элементов анализа (катушек обнаружения РЧ шума) состоит в сборе только ложного РЧ сигнала, следует также понимать, что ложные РЧ сигналы из любого источника, включая вызванные градиентами острые импульсы, также будут собираться и, в принципе, также могут исключаться из требуемого МРТ-сигнала.
В некоторых примерах принято допущение, что как данные визуализации (магнитно-резонансные данные визуализации), так и данные анализа (радиочастотные данные шума) собираются одновременно собираются, дискретизируются и сохраняются в цифровой форме для дальнейшей обработки.
Калибровка на основе анализа (калибровка на основе катушек обнаружения РЧ шума): В предпочтительном варианте, до сбора МРТ-данных, собирается несколько «имитирующих» TR данных (имитирующих повторений данных) с использованием последовательности с идентичной временной диаграммой, но без РЧ возбуждения (смотри этап 204 на фиг. 2). Данную операцию можно также выполнять в конце сканирования или в начале, так и в конце. Упомянутые данные являются содержательными в том смысле, что каждый из элементов визуализации будет собирать только ложный сигнал периода имитации (без РЧ). Таким образом, может быть установлена зависимость между амплитудой и фазой ложного сигнала, собранного элементами анализа (катушками обнаружения РЧ шума) и относительная амплитуда и фаза ложного сигнала (собранного каждым из элементов визуализации).
Общий подход к исключению ложных сигналов: В простейшей форме, исключение ложных сигналов из МРТ-сигнала может включать в себя вычитание (смотри этап 304 на фиг. 3) сигнала анализа, соответственно масштабированного и ограниченного порогом, из сигнала, собранного каждым элементом визуализации. Данная операция может выполняться либо в области изображения, либо в k-пространстве. Однако, два фактора могут способствовать срыву данного простого подхода. 1) Амплитуда и фаза ложного сигнала, собранного каждым элементом визуализации будут отличаться от сигнала, собранного элементами анализа, и 2) ложный сигнал может изменять свои временные характеристики в течение сканирования. Ложный сигнал можно рассматривать как пример РЧ шумового события.
Исключение ложных сигналов посредством синтезированного периода времени: Данное усложнение можно осуществить с использованием данных элементов визуализации (калибровочных магнитно-резонансных данных), собранных в течение имитационных периодов, совместно с данными анализа (радиочастотными данными шума и опорными радиочастотными данными), которые собирались в течение всего периода времени сбора данных. Важная часть обработки данных использует период времени сигнала анализа и выполняет пороговую обработку сигнала с оставлением только сигнала, который сохраняется выше выбранной доли уровня собственных шумов. Авторы настоящего изобретения принимают сигнал анализа, который был собран параллельно с сигналом элемента визуализации в течение «имитационного» периода калибровки в качестве базового набора синхронизированных данных. Сигналы анализа, собранные и подвергнутые пороговой обработке впоследствии, сравниваются посредством последующего комплексного вычитания, чтобы определить изменение амплитуды и фазы каждой составляющей ложного сигнала. Таким образом, период времени относительного изменения амплитуды и фазы ложного сигнала устанавливается из сигнала анализа. Затем, этот же период времени используется для последовательного масштабирования и сохранения ложных данных, которые собирались из каждого элемента визуализации в течение периода калибровки. С помощью данного способа можно синтезировать изменение эффективного ложного сигнала на каждом элементе визуализации на протяжении всего сканирования.
В данном случае необязательно ожидать завершения всего сканирования. Коррекцию ложного сигнала можно выполнять во время сбора данных.
Для иллюстрации задается сканирование из N повторных периодов сбора данных. В случае сканирования последовательностью быстрого полевого эхо (FFE), данная операция будет эквивалента N повторениям (TR). Для удобства, данные визуализации (магнитно-резонансные данные визуализации) определяются как данные, собранные между n=1-N. Ложные опорные калибровочные данные (калибровочные магнитно-резонансные данные) определяются как данные собранные при или до n=0. Для иллюстрации вышеописанного произвольно устанавливается, что каждый период сбора данных состоит из окна сбора данных из 256 комплексных отсчетов данных.
Задаются также в общей сложности R приемных элементов, при этом элементы, индексируемые от r=1 до R, являются элементами визуализации (антенными элементами), а элемент, индексированный r=0, является элементом анализа.
Сигнал любого элемента (антенного элемента) можно индексировать в зависимости как от n, так и от r, таким образом, что: Sp(0, 0) представляет ложный сигнал, собранный элементом анализа (катушкой обнаружения РЧ шума) в течение имитационного периода калибровки. Для каждого элемента визуализации существует также ложный опорный калибровочный сигнал, Sp(0, r=1…R), собранный в течение того же имитационного периода.
В течение любого периода повторения (TR) (n>1) и для каждого элемента визуализации (r>1), вклад ложного сигнала в дискретизированный сигнал на любом катушечном элементе можно оценить следующим образом:
dSp(n, r=1…R)=Sp(0, r=1…R)×Sp(n, 0)/Sp(0, 0), где принят комплексный математический подход. Данные, отбираемые из каждого из элементов визуализации в течение периода n>1, которые обозначены как Aq(n, r=1…R), будут содержать как требуемый МР сигнал из каждого местоположения, Cl(n, r=1…R), так и фактический нежелательный ложный сигнал dSp‡(n, r=1…R), отобранный из каждого элемента визуализации. Таким образом:
Aq(n, r=1…R)=Cl(n, r=1…R)+Sp‡(n, r=1..R).
В общем, вклад ложного сигнала для каждого элемента визуализации в каждый момент отсчета можно оценить по синтезированным данным, полученным из имитационного периода калибровки и продолжающихся измерений анализирующих катушек (радиочастотные данные шума):
Sp‡(n, r=1…R)≈dSp(n, r=1…R).
Таким образом, чистый МР сигнал можно извлечь из каждого элемента визуализации посредством комплексного вычитания соответствующих временных рядов синтезированных ложного сигнала.
Cl(n, r=1…R)=Aq(n, r=1…R)- dSp(n, r=1…R).
Существую различные возможные варианты выполнения коррекции, в зависимости от архитектуры DAS (системы сбора данных). В одном варианте осуществления все данные сохраняются, и корректировки выполняются во время реконструкции. В предпочтительном варианте осуществления, поскольку вся необходимая информация для коррекции данных в пределах TR (повторения импульсной последовательности) доступна в конце каждого TR (при условии, что n>0), корректировки для каждого TR могут выполняться в процессе работы перед тем, как скорректированные данные посылаются в подсистему реконструкции.
Фиг. 6 является графической иллюстрацией того, как можно исключать вклады различных ложных сигналов в сигналы каждого элемента визуализации, при условии, что сигнал анализа существует для каждого TR, и ложные сигналы, не зависящие от МР сигнала, (без РЧ возбуждения) калибруются для каждого катушечного элемента визуализации в пределах периода калибровки.
Фиг. 6 представляет графическую иллюстрацию того, как можно устранять вклады различных ложных сигналов в сигналы каждого элемента визуализации, при условии, что сигнал анализа или сигнал из катушки обнаружения РЧ шума существует для каждого TR или повторения, и магнитно-резонансный сигнал не зависит от РЧ возбуждения. Ложные сигналы калибруются для каждой катушечного элемента визуализации в пределах калибровки. Строка 600 показывает сигнал анализирующей катушки. Строка 602 показывает сигнал на катушке 1 визуализации. Строка 604 показывает сигнал на катушке 2 визуализации. Шум обозначен позицией 606, и чистый сигнал магнитно-резонансной томографии обозначен позицией 608. Примеры оценки dSp показаны, когда n=0 и n=4.
Во время первого повторения TR n=0 собираются опорные радиочастотные данные 146 и калибровочные магнитно-резонансные данные 144. Во время последующих повторений сигнал 600 анализирующей катушки собирает радиочастотные данные 148 шума в то же самое время, когда собираются магнитно-резонансные данные визуализации. Магнитно-резонансные данные визуализации показаны в каждом случае в виде суммы чистых или скорректированных магнитно-резонансных данных 152 визуализации и шумового сигнала 606.
Некоторые дополнительные сведения относятся к правильному функционированию предложенного примера. При МРТ с напряженностями статического поля выше 0,1 Тл, превалирующий источник широкополосного теплового шума происходит от самого отсчета. В общем, коэффициент шума предусилителя рассчитывают так, чтобы он был ниже, чем упомянутый источник шума отсчета, так что шум отсчета доминирует. Поэтому, для катушечного элемента, например, предназначенного для анализирующей катушки, в местоположении не вплотную к пациенту, превалирующим источником теплового шума будет предусилитель. В этом случае, все остальные присутствующие сигналы можно считать внешним ложным шумом.
Полезно также, когда ложный шумовой сигнал остается в пределах динамического диапазона приемников.
Примеры могут содержать один или более из следующих признаков:
1. Конфигурация аппаратного обеспечения и способ обработки сигналов, который исключает ложный сигнал из МР данных, собранных из, по меньшей мере, одного приемного элемента в случае, когда РЧ сетчатое ограждение отсутствует.
2. Тот же способ также пригоден для исключения эффектов острых импульсов, наведенных градиентной системой.
3. Упомянутый способ использует, по меньшей мере, одну «анализирующую» катушку, которая обнаруживает только сигналы, внешние относительно объема визуализации МР системы.
4. Упомянутый способ использует, по меньшей мере, одну анализирующую приемную катушку, которая устанавливается в местоположении, где она не может обнаруживать МР сигнал.
5. Упомянутая анализирующая катушка соединена с системой сбора данных (DAS), и сигнал с упомянутой катушки собирается одновременно с сигналом из всех приемных катушечных элементов.
6. Данные для упомянутой анализирующей катушки собираются непрерывно.
7. Упомянутый способ коррекции опционально выполняет сбор данных калибровки, при котором никакого РЧ возбуждения не выполняется, что позволяет установить относительные вклады ложных сигналов из каждого приемного элемента.
8. Упомянутая калибровка может происходить до или после сбора клинических данных.
9. Упомянутая калибровка выполняется для каждого пациента.
10. Обработка для исключения ложного сигнала может выполняться либо после завершения полного сканирования, либо периодически во время сканирования.
В некоторых примерах, катушка обнаружения РЧ шума или анализирующая катушка может содержать следующие признаки:
1.) Находиться достаточно далеко от зоны визуализации, так что то, что измеряет катушка, является шумом, а не МР сигналом (или, по меньшей мере, МР сигнал меньше в сравнении с данными измерения шума, и
2.) Быть подобной МР катушке в том, что шумовой сигнал (радиочастотные данные шума), измеренный анализатором (катушкой обнаружения РЧ шума), сравним с шумом, принимаемым МР катушкой.
Некоторые примеры могут предполагать, что шум в анализирующей катушке является однотипным с шумом в МР катушке. Другими словами, как катушка обнаружения РЧ шума, так и магнитно-резонансная антенна считаются находящимися в дальней зоне источника шума.
Выше изобретение подробно изображено и описано на чертежах и в описании, однако, упомянутые изображение и описание следует считать наглядными или примерными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления.
После изучения чертежей, описания и прилагаемой формулы изобретения, специалистами в данной области техники в процессе практической реализации заявленного изобретения могут быть разработаны и выполнены другие модификации раскрытых вариантов осуществления. В формуле изобретения, формулировка «содержащий» не исключает других элементов или этапов, и признак единственного числа не исключает множественного числа. Единственный процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Очевидное обстоятельство, что некоторые признаки упомянуты во взаимно различающихся зависимых пунктах формулы изобретения, не означает невозможность применения комбинации упомянутых признаков в подходящем случае. Компьютерная программа может храниться/распространяться на подходящем носителе, например, оптическом носителе данных или полупроводниковом носителе, поставляемом совместно с другими аппаратным обеспечением или в его составе, но может также распространяться в других формах, например, по сети Интернет или в других проводных или беспроводных телекоммуникационных системах. Никакие позиции в формуле изобретения нельзя считать ограничивающими объем изобретения.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
100 система магнитно-резонансной томографии
104 магнит
106 туннель магнита
108 зона визуализации
110 градиентные магнитные катушки
112 источник питания градиентных магнитных катушек
114 катушка для тела
116 приемопередатчик
118 субъект
120 опора субъекта
122 катушка обнаружения РЧ шума
124 катушка магнитно-резонансного изображения
126 антенный элемент
130 компьютер
132 аппаратный интерфейс
134 пользовательский интерфейс
136 компьютерное запоминающее устройство
138 компьютерная память
140 данные импульсной последовательности
142 магнитно-резонансные данные визуализации
144 калибровочные магнитно-резонансные данные
146 опорные радиочастотные данные
148 радиочастотные данные шума
150 калибровка шума
152 скорректированные магнитно-резонансные данные визуализации
154 магнитно-резонансное изображение
160 модуль управления
162 модуль реконструкции изображения
164 модуль цифрового фильтра
200 собрать магнитно-резонансные данные визуализации посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности, при включенном радиочастотном возбуждении радиочастотной системы
202 собрать радиочастотные данные шума с использованием, по меньшей мере, одной катушки обнаружения РЧ шума одновременно с магнитно-резонансными данными визуализации
204 собрать калибровочные магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности, при выключенном радиочастотном возбуждении радиочастотной системы
206 собрать опорные радиочастотные данные с использованием, по меньшей мере, одной катушки обнаружения РЧ шума одновременно с калибровочными магнитно-резонансными данными
208 вычислить калибровку шума с использованием опорных радиочастотных данных и калибровочных магнитно-резонансных данных
300 обнаруживать один или более РЧ шумовых событий с использованием радиочастотных данных шума
302 определить фазу шумового события, частоту шумового события и амплитуду шума для каждого из одного или более РЧ шумовых событий
304 скорректировать каждое из РЧ шумовых событий в магнитно-резонансных данных изображения с использованием калибровки шума и фазы шумового события, частоты шумового события и амплитуды шумового события
306 реконструировать магнитно-резонансное изображение из скорректированных магнитно-резонансных данных визуализации
400 разбить радиочастотные данные шума по временным кадрам шума
402 разбить магнитно-резонансные данные визуализации на временные кадры данных
404 вычислить спектр шума, измеренный на коротком временном интервале, для каждого из временных кадров шума
406 вычислить спектр шума, вычисляемый на коротком временном интервале, для каждого спектра шума, измеренного на коротком временном интервале, с использованием калибровки шума
408 вычислить кратковременный спектр данных для каждого из временных кадров данных
410 сортировка каждого спектра шума, вычисляемого на коротком временном интервале, по частотным интервалам (бинам) шума
412 сортировка каждого кратковременного спектра данных по частотным интервалам данных
414 вычислить скорректированные частотные интервалы данных посредством вычитания частотных интервалов шума из частотных интервалов данных с использованием идентичных частотных интервалов; и
416 повторно синтезировать магнитно-резонансные данные визуализации с использованием скорректированных частотных интервалов данных и исходного фазового спектра магнитно-резонансных данных визуализации
418 реконструировать магнитно-резонансное изображение из повторно синтезированных магнитно-резонансных данных визуализации
500 предусилитель
600 сигнал анализирующей катушки
602 сигнал катушки 1 визуализации
604 сигнал катушки 2 визуализации
606 шум
608 МР сигнал
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ С РЧ-ШУМАМИ | 2016 |
|
RU2710012C2 |
| ДАКТИЛОСКОПИЯ МАГНИТНО-РЕЗОНАНСНОЙ СИСТЕМЫ | 2016 |
|
RU2683602C2 |
| ТЕРАПЕВТИЧЕСКАЯ СИСТЕМА, СОДЕРЖАЩАЯ МОДУЛЬ МРТ И СРЕДСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РЧ-КАТУШКИ | 2015 |
|
RU2683995C2 |
| СПОСОБ ГЕНЕРАЦИИ МНОГОДИАПАЗОННЫХ РЧ ИМПУЛЬСОВ | 2015 |
|
RU2689974C2 |
| БЕСПРОВОДНОЙ МАРКЕР ПЕРСПЕКТИВНОГО ДВИЖЕНИЯ | 2012 |
|
RU2604702C2 |
| УПРАВЛЯЕМАЯ ПОТОКОМ ДАННЫХ КОРРЕКЦИЯ ФАЗОЗАВИСИМЫХ АРТЕФАКТОВ В СИСТЕМЕ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2018 |
|
RU2764643C2 |
| ВИЗУАЛИЗАЦИЯ СИЛЫ ДАВЛЕНИЯ АКУСТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2016 |
|
RU2711326C2 |
| УДАЛЕНИЕ АРТЕФАКТОВ ИЗОБРАЖЕНИЙ ПРИ SENSE-ВИЗУАЛИЗАЦИИ | 2016 |
|
RU2730431C2 |
| КАТУШЕЧНАЯ КОНСТРУКЦИЯ ДЛЯ СИСТЕМЫ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2019 |
|
RU2790472C2 |
| ВЫРАВНИВАНИЕ СИСТЕМ КООРДИНАТ ВНЕШНЕЙ ЛУЧЕВОЙ РАДИОТЕРАПИИ И СИСТЕМ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2014 |
|
RU2677049C2 |

Группа изобретений относится к магнитно-резонансной томографии. Система магнитно-резонансной томографии для сбора магнитно-резонансных данных из зоны визуализации предписывает процессору, управляющему МРТ-системой, собирать магнитно-резонансные данные визуализации при включенном радиочастотном возбуждении радиочастотной системы; собирать радиочастотные данные шума с использованием катушки обнаружения РЧ шума, при этом радиочастотные данные шума собираются одновременно с магнитно-резонансными данными визуализации; собирать калибровочные магнитно-резонансные данные при выключенном радиочастотном возбуждении радиочастотной системы; собирать опорные радиочастотные данные с использованием катушки обнаружения РЧ шума, причем опорные радиочастотные данные собираются одновременно с калибровочными магнитно-резонансными данными; и вычислять калибровку шума с использованием опорных радиочастотных данных и калибровочных магнитно-резонансных данных. Технический результат – повышение качества изображения системой МРТ. 3 н. и 12 з.п. ф-лы, 6 ил.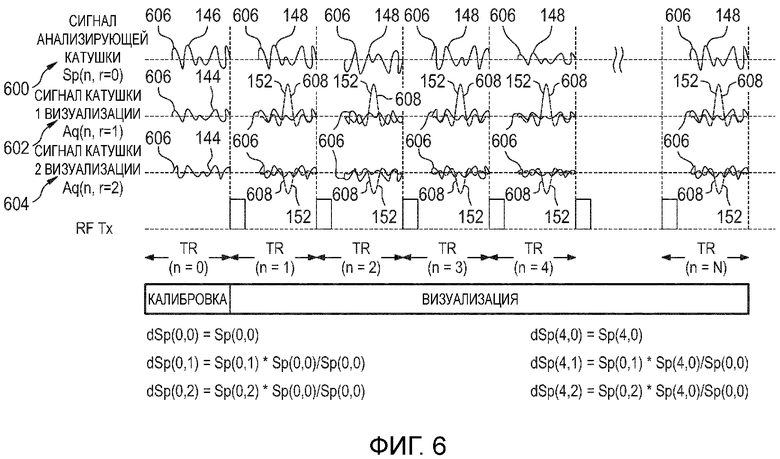
1. Система (100) магнитно-резонансной томографии для сбора магнитно-резонансных данных (142, 144) из зоны (108) визуализации, при этом система магнитно-резонансной томографии содержит:
- магнит (104) для формирования основного магнитного поля в зоне визуализации;
- радиочастотную систему, содержащую магнитно-резонансную антенну (124) для посылки и приема радиочастотных излучений в предварительно заданной полосе частот, причем магнитно-резонансная антенна содержит по меньшей мере один антенный элемент (126), причем по меньшей мере один антенный элемент находится в зоне визуализации;
- по меньшей мере одну катушку (122) обнаружения РЧ шума для обнаружения радиочастотных сигналов в предварительно заданной полосе частот, причем по меньшей мере одна катушка обнаружения РЧ шума расположена внутри или около туннеля магнита за пределами зоны визуализации;
- память (138), содержащую машинно-выполняемые команды (160, 162, 164) и данные (140) импульсной последовательности;
- процессор (133) для управления системой магнитно-резонансной томографии, причем выполнение команд предписывает процессору:
- собирать (200) магнитно-резонансные данные (142) визуализации посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности при включенном радиочастотном возбуждении радиочастотной системы;
- собирать (202) радиочастотные данные (148) шума с использованием по меньшей мере одной катушки обнаружения РЧ шума, причем радиочастотные данные шума собираются одновременно с магнитно-резонансными данными визуализации;
- собирать (204) калибровочные магнитно-резонансные данные (144) посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности при выключенном радиочастотном возбуждении радиочастотной системы;
- собирать (206) опорные радиочастотные данные (146) с использованием по меньшей мере одной катушки обнаружения РЧ шума, причем опорные радиочастотные данные собираются одновременно с калибровочными магнитно-резонансными данными; и
- вычислять (208) калибровку (150) шума с использованием опорных радиочастотных данных и калибровочных магнитно-резонансных данных, чтобы установить отношение между амплитудой и фазой опорных радиочастотных данных, собранных катушкой(ами) обнаружения РЧ шума, и соответственной амплитудой и фазой калибровочных магнитно-резонансных данных, и
- корректировать (304) РЧ шумовые события в магнитно-резонансных данных визуализации с использованием калибровки шума и фазы шумового события, частоты шумового события и амплитуды шумового события.
2. Система магнитно-резонансной томографии по п. 1, в которой калибровка шума является частотно-зависимой, фазозависимой и амплитудно-зависимой; при этом выполнение команд дополнительно предписывает процессору:
- обнаруживать (300) одно или более РЧ шумовых событий с использованием радиочастотных данных шума;
- определять (302) фазу шумового события, частоту шумового события и амплитуду шума для каждого из одного или более РЧ шумовых событий; и
- корректировать (304) каждое из обнаруженных РЧ шумовых событий в магнитно-резонансных данных визуализации с использованием калибровки шума и фазы шумового события, частоты шумового события и амплитуды шумового события.
3. Система магнитно-резонансной томографии по п. 2, в которой калибровка шума вычисляется посредством определения частотно-зависимого отображения, которое описывает измерения фазы и амплитуды, выполненные с помощью по меньшей мере одной катушки обнаружения РЧ шума и каждого из по меньшей мере одного антенного элемента.
4. Система магнитно-резонансной томографии по п. 3, в которой каждое из РЧ шумовых событий корректируется посредством:
- вычисления шумового сигнала, зависящего от времени, для каждого из по меньшей мере одного антенного элемента с использованием калибровки шума и фазы шумового события, частоты шумового события и амплитуды шумового события; и
- вычитания шумового сигнала, зависящего от времени, из магнитно-резонансных данных визуализации.
5. Система магнитно-резонансной томографии по п. 4, в которой вычитание шумового сигнала, зависящего от времени, из магнитно-резонансных данных визуализации выполняется в k-пространстве.
6. Система магнитно-резонансной томографии по п. 4, в которой выполнение команд предписывает процессору вычитать шумовой сигнал, зависящий от времени, из магнитно-резонансных данных визуализации посредством:
- преобразования магнитно-резонансных данных визуализации в предварительное магнитно-резонансное изображение;
- преобразования шумового сигнала, зависящего от времени, в изображение шума; и
- вычисления окончательного магнитно-резонансного изображения посредством вычитания изображения шума из предварительного магнитно-резонансного изображения.
7. Система магнитно-резонансной томографии по любому из предыдущих пунктов, в которой одно или более РЧ шумовых событий определяются посредством задания порога опорных радиочастотных данных.
8. Система магнитно-резонансной томографии по п. 1, в которой выполнение машинно-выполняемых команд дополнительно предписывает процессору:
- разбивать (400) радиочастотные данные шума на временные кадры шума;
- разбивать (402) магнитно-резонансные данные визуализации на временные кадры данных, при этом существует временной кадр данных, выбранный из временных кадров данных, который соответствует по времени временному кадру шума, выбранному из временных кадров шума;
- вычислять (404) спектр шума, измеренный на коротком временном интервале, для каждого из временных кадров шума;
- вычислять (406) спектр шума, вычисляемый на коротком временном интервале, для каждого спектра шума, измеренного на коротком временном интервале, с использованием калибровки шума;
- вычислять (408) кратковременный спектр данных для каждого из временных кадров данных;
- сортировать (410) каждый спектр шума, вычисляемый на коротком временном интервале, по частотным интервалам шума;
- сортировать (412) каждый кратковременный спектр данных по частотным интервалам данных, причем сортировка спектра шума, вычисленного на коротком временном интервале, и кратковременного спектра данных выполняется с использованием идентичных частотных интервалов;
- вычислять (414) скорректированные частотные интервалы данных посредством вычитания частотных интервалов шума из частотных интервалов данных с использованием идентичных частотных интервалов; и
- повторно синтезировать (416) магнитно-резонансные данные визуализации с использованием скорректированных частотных интервалов данных и исходного фазового спектра магнитно-резонансных данных визуализации.
9. Система магнитно-резонансной томографии по любому из предыдущих пунктов, в которой магнит является цилиндрическим магнитом с туннелем (106), при этом магнитно-резонансная антенна является катушкой (114) для тела, расположенной внутри туннеля, причем по меньшей мере один антенный элемент расположен внутри туннеля магнита.
10. Система магнитно-резонансной томографии по любому из пп.1-8, в которой магнитно-резонансная антенна является поверхностной катушкой (124), при этом по меньшей мере один антенный элемент является рамочным антенным элементом, причем каждая из по меньшей мере одной катушки обнаружения РЧ шума является рамочной антенной.
11. Система магнитно-резонансной томографии по любому из предыдущих пунктов, в которой предварительно заданная полоса частот находится в пределах от 1 кГц до 1 МГц.
12. Система магнитно-резонансной томографии по любому из предыдущих пунктов, в которой либо магнитно-резонансные данные визуализации, либо калибровочные магнитно-резонансные данные могут собираться первыми.
13. Система магнитно-резонансной томографии по любому из предыдущих пунктов, в которой выполнение команд дополнительно предписывает процессору реконструировать (306, 418) магнитно-резонансное изображение с использованием магнитно-резонансных данных визуализации.
14. Способ управления системой магнитно-резонансной томографии для сбора магнитно-резонансных данных (142, 144) из зоны визуализации, при этом система магнитно-резонансной томографии содержит: магнит (104) для формирования основного магнитного поля в зоне (108) визуализации; радиочастотную систему, содержащую магнитно-резонансную антенну (114, 124) для посылки и приема радиочастотных излучений в предварительно заданной полосе частот, причем магнитно-резонансная антенна содержит по меньшей мере один антенный элемент (126), причем по меньшей мере один антенный элемент находится в зоне визуализации; по меньшей мере одну катушку (122) обнаружения РЧ шума для обнаружения радиочастотных сигналов в предварительно заданной полосе частот, причем по меньшей мере одна катушка обнаружения РЧ шума расположена внутри или около туннеля магнита за пределами зоны визуализации; причем способ содержит этапы, на которых:
- собирают (200) магнитно-резонансные данные (142) визуализации посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности при включенном радиочастотном возбуждении радиочастотной системы;
- собирают (202) радиочастотные данные (148) шума с использованием по меньшей мере одной катушки обнаружения РЧ шума, причем радиочастотные данные шума собираются одновременно с магнитно-резонансными данными визуализации;
- собирают (204) калибровочные магнитно-резонансные данные (144) посредством управления системой магнитно-резонансной томографии с помощью данных импульсной последовательности при выключенном радиочастотном возбуждении радиочастотной системы;
- собирают (206) опорные радиочастотные данные (146) с использованием по меньшей мере одной катушки обнаружения РЧ шума, причем опорные радиочастотные данные собираются одновременно с калибровочными магнитно-резонансными данными; и
- вычисляют (208) калибровку (150) шума с использованием опорных радиочастотных данных и калибровочных магнитно-резонансных данных, чтобы установить отношение между амплитудой и фазой опорных радиочастотных данных, собранных катушкой(ами) обнаружения РЧ шума, и соответственной амплитудой и фазой калибровочных магнитно-резонансных данных; и
- корректируют (304) РЧ шумовые события в магнитно-резонансных данных визуализации с использованием калибровки шума и фазы шумового события, частоты шумового события и амплитуды шумового события.
15. Компьютерно-читаемый носитель, содержащий компьютерно-выполняемый код для предписывания компьютеру выполнять способ по п.14.
| WO 2013016639 A1, 31.01.2013 | |||
| WO 2008022441 A1, 28.02.2008 | |||
| US 2014070810 A1, 13.03.2014 | |||
| УСТРОЙСТВО И СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ МЕТОДОМ МАГНИТНОГО РЕЗОНАНСА | 2008 |
|
RU2491567C2 |

