Область техники, к которой относится изобретение
Нижеследующее относится, в основном, к медицинской визуализации. Изобретение находит конкретное применение в сочетании с магнитно-резонансной (МР-) визуализацией, реконструкцией МР-изображения и технологиями фильтрации изображения, и будет описано с ссылкой на вышеизложенное. Однако должно быть понятно, что оно также находит применение в других сценариях использования и не обязательно ограничено вышеупомянутым приложением.
Уровень техники
При МР-визуализации, исходные МР данные принимаются от одной или нескольких приемных катушек, которые измеряют MR сигнал от тканей субъекта. Приемные катушки могут включать в себя многоканальные приемные катушки, что обеспечивает пространственное перекрытие МР данных, такое как параллельная визуализация.
В многоканальных МР сканерах, в уровне техники предлагается итеративное объединение шумоподавления и реконструкции параллельной визуализации, такое как кодирование чувствительности (SENSE), обобщенный частично параллельный сбор данных с автокалибровкой (GRAPPA), и т.п., которые итеративно реконструируют изображение. Feng и др. «A Rapid and Robust Numerical Algorithm for Sensitivity Encoding with Sparsity Constraints: Self-Feeding Sparse SENSE», Magnetic Resonance in Medicine 64:1078-1088 (2010). Каждая итерация создает частично реконструированное изображение, используя несколько каналов принятых МР-данных в качестве входных данных. Как правило, между итерациями итеративной реконструкции, частично реконструированное изображение проходит через шумоподавляющий фильтр. Шумоподавляющий фильтр вводит сгенерированное изображение и выводит очищенное от шумов изображение. Очищенное от шумов изображение используется вместо входного сгенерированного изображения в следующей итеративной реконструкции. Никакой дополнительной информации не предоставляется алгоритму итеративной реконструкции в отношении успешности или изменения посредством процесса шумоподавления.
Нижеследующее описывает новый и улучшенный шумоподавляющий фильтр с обратной связью для итерационной параллельной визуализации, который решает вышеуказанные и другие задачи.
Раскрытие изобретения
В соответствии с одним аспектом, система магнитно-резонансной визуализации включает в себя блок шумоподавления и блок реконструкции. Блок шумоподавления очищает от шума частично реконструированное изображение и обеспечивает измерение эффективности шумоподавления. Блок реконструкции итеративно реконструирует принятые параллельные МР данные с помощью реконструкции методом параллельной визуализации и, при последующих итерациях, очищенного от шумов частично реконструированного изображения, и меры эффективности шумоподавления для генерации выходного изображения.
В соответствии с другим аспектом, способ магнитно-резонансной визуализации включает в себя шумоподавление частично реконструированного изображения и предоставление меры эффективности шумоподавления. Частично реконструированное изображение итеративно реконструируется на основе принятых параллельных МР данных, очищенного от шумов частично реконструированного изображения и меры эффективности шумоподавления.
В соответствии с другим аспектом, система магнитно-резонансной визуализации включает в себя один или несколько процессоров и дисплей. Один или несколько процессоров сконфигурированы для приема параллельных магнитно-резонансных (МР) данных и реконструкции МР данных в компоненту изображения. Один или несколько процессоров дополнительно сконфигурированы для очищения от шумов компоненты изображения и предоставляют пространственно локализованную меру эффективности шумоподавления, и итеративно реконструируют выходное изображение с использованием метода параллельной реконструкции на основе МР данных, очищенной от шумов компоненты изображения и пространственно локализованной меры эффективности шумоподавления. Дисплей отображает выходное изображение.
Одним из преимуществ является информация от шумоподавляющего фильтра, который используется для улучшения параллельной реконструкции изображения.
Еще одно преимущество состоит в улучшение качества изображения.
Другое преимущество заключается в возможности повторного использования существующего аппаратного и программного обеспечения.
Еще одно преимущество заключается в применимости к пространственному перекрытию МР данных многоканальных систем.
Другие дополнительные преимущества будут понятны специалистам в данной области после прочтения и восприняты из следующего подробного описания.
Изобретение может принимать форму в виде различных компонент и вариантах сочетания компонент, а также в виде различных этапов и компоновки этапов. Чертежи имеют целью только проиллюстрировать предпочтительные варианты осуществления и не должны толковаться как ограничивающие данное изобретение.
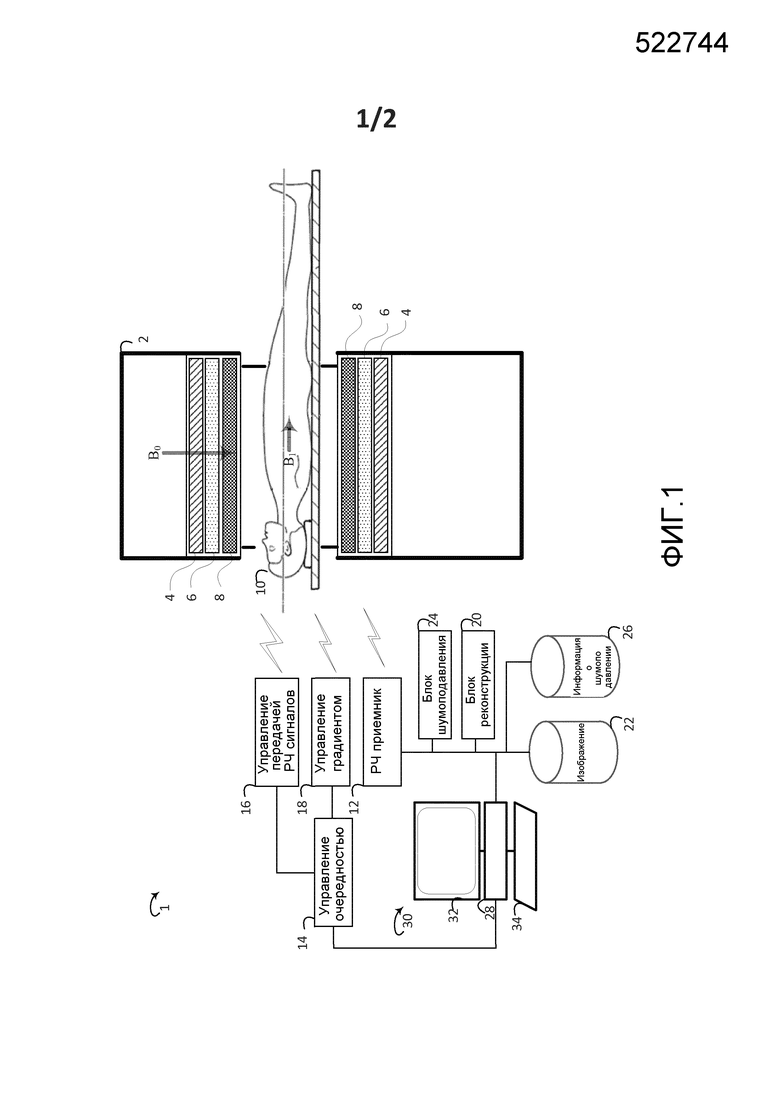
На ФИГУРЕ 1 схематически показан вариант осуществления итеративного шумоподавления с системой обратной связи для SENSE.
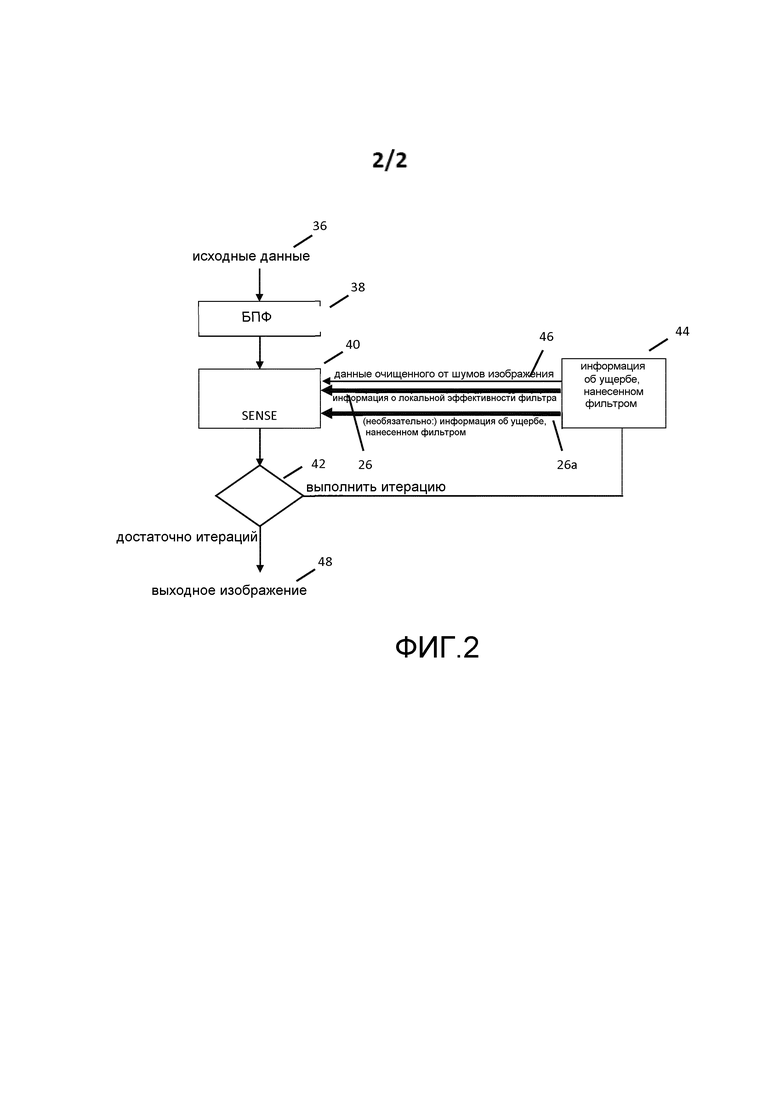
На ФИГУРЕ 2 представлена блок-схема одного из способов использования варианта осуществления итеративного шумоподавления с обратной связью для SENSE.
Как показано на ФИГУРЕ 1, схематически представлен вариант осуществления итеративной параллельной визуализации, такой как SENSE, с системой 1 обратной связи. Система 1 включает в себя магнитно-резонансное (МР) сканирующее устройство 2, такое как горизонтальный туннель, открытая система, с-образный туннель, комбинированный и/или гибридный МР-сканер. МР сканирующее устройство 2 включает в себя основной магнит 4, одну или несколько градиентных катушек 6 и одну или несколько радиочастотных (РЧ) катушек 8. Основной магнит 4 генерирует статическое магнитное поле или поле В0, такое как вертикально или горизонтально ориентированное поле. РЧ-катушки 8 возбуждают и управляют магнитным резонансом в субъекте 10. РЧ-катушка включает в себя многоканальные катушки или катушки с множеством элементов катушки. РЧ-катушка может включать в себя приемо-передающую катушку для исследований всего тела с множеством независимо управляемых элементов катушки для передачи параллельной визуализации. РЧ-катушка может включать в себя одну или несколько локальных катушек, таких как катушка для головы, катушка для груди, катушка для предстательной железы, катушка для колена, катушка для ноги и т.п. РЧ-катушка может работать в режиме передачи, который возбуждает магнитный резонанс, или в режиме приема, который измеряет МР сигнал в субъекте и передает МР данные множеству РЧ приемников 12 для приема параллельной визуализации. Градиентные катушки 6 управляют магнитным резонансом и фокусируют его. SENSE визуализация может включать в себя множество каналов, как например 8, 16, 32 или тому подобное.
Система включает в себя управление 14 очередностью, управление 16 передачей РЧ сигналов и управление 18 градиентом. Управление очередностью управляет и координирует управление передачей РЧ сигналов и управление градиентом. Управление передачей РЧ сигналов управляет конфигурацией и временным согласованием РЧ-катушек, как например мощностью, продолжительностью и фазой РЧ импульсов, используемых для возбуждения магнитного резонанса, и приемом МР сигнала. Управление градиентом управляет приложением градиентных полей градиентными катушками.
Система включает в себя блок 20 реконструкции, который реконструирует МР данные, принятые РЧ приемниками 12 с помощью реконструкции методом параллельной визуализации. Преобразование Фурье (БПФ) преобразует данные из временного интервала или пространства данных в пространственную область или пространство изображения. Блок реконструкции итеративно реконструирует множество параллельных данных преобразования Фурье в изображение, которое хранится в памяти 22 для хранения изображений. Блок реконструкции использует алгоритм параллельной реконструкции, такой как SENSE, GRAPPA и т.п. Параллельная реконструкция использует карты чувствительности катушек и пространственное перекрытие наборов данных, принятых элементами катушек, для определения местоположений наложения данных. Например, первоначальная реконструкция вводит МР данные для конструирования первого частично реконструированного изображения с шумами из МР данных. Первое изображение пересматривается на основании МР данных в каждой итерации до тех пор, пока не будет достигнуто минимальное пороговое значение изменения или пороговое число итераций. Когда пороговое значение достигнуто, итоговое частично реконструированное изображение выводится в качестве диагностического изображения. Система включает в себя блок 24 шумоподавления, который вводит частично реконструированное изображение из блока реконструкции, идентифицирует уровни и местоположения шума и удаляет шум из частично реконструированного изображения до начала следующей итерации реконструкции, например, фильтрует частичное реконструированное изображение.
Например, SENSE реконструкция может быть описана  =
= (
( ))), где
))), где  вычисляются как =
вычисляются как = +
+ с начальным значением
с начальным значением  =R («матрица регуляризации», которая указывает на априорную информацию о наличии ткани). Символ
=R («матрица регуляризации», которая указывает на априорную информацию о наличии ткани). Символ  представляет собой информацию об «ущербе, причиненном фильтром». Если она неизвестна, то ее можно оценить как =
представляет собой информацию об «ущербе, причиненном фильтром». Если она неизвестна, то ее можно оценить как = ·diag(
·diag( ), с
), с  (
( . В этих выражениях p может быть расчетным значением пикселя, с начальным значением
. В этих выражениях p может быть расчетным значением пикселя, с начальным значением  =0, и
=0, и  i его оценка после i-й SENSE итерации;
i его оценка после i-й SENSE итерации;  результатом после шумоподавления.
результатом после шумоподавления.  представляет чувствительность катушки, индекс h относится к эрмитову сопряжению;
представляет чувствительность катушки, индекс h относится к эрмитову сопряжению;  представляет ковариацию шума в исходных данных m, F представляет оценку эффективности фильтра, выраженную в виде матрицы, и m = p+n или измеренные данные, выраженные через вектор по числу элементов катушки. Чтобы упростить выражение с помощью аппроксимации , можн выбрать диагональную матрицу или матрицу тождественного
представляет ковариацию шума в исходных данных m, F представляет оценку эффективности фильтра, выраженную в виде матрицы, и m = p+n или измеренные данные, выраженные через вектор по числу элементов катушки. Чтобы упростить выражение с помощью аппроксимации , можн выбрать диагональную матрицу или матрицу тождественного
преобразования. Оценка локально достигнутого снижения уровня шума может быть выражена диагональным элементом F через относительное измерение.
По другому аспекту настоящего изобретения, первая итерация SENSE реконструкции может альтернативно описываться как  =
= +
+ ), где
), где  это изображение после одной итерации,
это изображение после одной итерации,  исходное изображение
исходное изображение  после шумоподавления фильтром f, S это карта чувствительности катушки и
после шумоподавления фильтром f, S это карта чувствительности катушки и  это эрмитова транспозиция S, F это оценка эффективности фильтра, выраженная в виде матрицы,
это эрмитова транспозиция S, F это оценка эффективности фильтра, выраженная в виде матрицы,  ковариационная матрица шума, которая выражает ковариации между шумом измеренных данных, и m = p+n или измеренные данные, выраженные через вектор по числу элементов катушки.
ковариационная матрица шума, которая выражает ковариации между шумом измеренных данных, и m = p+n или измеренные данные, выраженные через вектор по числу элементов катушки.  может аппроксимироваться как , или, точнее, как (
может аппроксимироваться как , или, точнее, как ( . Чтобы упростить выражение с помощью аппроксимации , можно выбрать диагональную матрицу или матрицу тождественного преобразования. Оценка локально достигнутого снижения уровня шума может быть выражена диагональным элементом F через относительное измерение или включать в себя диагональный элемент в качестве абсолютного измерения, например путем непосредственного предоставления
. Чтобы упростить выражение с помощью аппроксимации , можно выбрать диагональную матрицу или матрицу тождественного преобразования. Оценка локально достигнутого снижения уровня шума может быть выражена диагональным элементом F через относительное измерение или включать в себя диагональный элемент в качестве абсолютного измерения, например путем непосредственного предоставления  .
.
Блок 24 шумоподавления включает в себя фильтр для удаления шума из частично реконструированного изображения. Блок шумоподавления может использовать шумоподавляющие фильтры, такие как направленный адаптивный фильтр шума и фильтр устранения артефактов, например фильтр, продаваемый под торговым названием PicturePlus ™ (см., например, EP0815535), и т.п. Очищенное от шумов изображение заменяется частично реконструированным изображением. Блок шумоподавления включает в себя меру эффективности обработки шумоподавляющего фильтра, в качестве обратной связи, которая хранится в памяти 26 для хранения информации о шумоподавлении. Необязательно, шумоподавляющий фильтр может предоставлять информацию на уровне ущерба, нанесенного шумоподавляющим фильтром 26а. Мера эффективности может включать в себя оценку локально достигнутого уровня шумоподавления. Это может относиться к ситуациям, когда процесс реконструкции МР изображения (или серий изображений) привел к следующей ситуации: шум в любой точке изображения коррелирует с шумом на дискретном множестве удаленных точек в этом изображении. Слово «отдаленная» предполагает исключение ситуации, когда шум в точке коррелирует с шумом в ее непосредственной близости, что обычно имеет место на всех МР изображениях.
Такая ситуация может возникнуть на практике, если изображение является результатом реконструкции параллельной визуализации данных, которые постоянно субдискретизировались в пространстве измерения. Наиболее частые примеры такой обработки называются SENSE и GRAPPA. «Дискретный набор отдаленных точек» затем соотносится с точками, каждая из которых отстоит на расстоянии одного наложения, которая, как правило, является полем обзора, разделенным на коэффициент уменьшения; мы также можем выразить его как 1/k – пространственный шаг сбора. Как правило, это расстояние составляет около 100 мм.
Согласно одному аспекту настоящего изобретения, на второй итерации формирования изображения результат обработки в одной точке ставится в зависимость от информации об эффективности фильтра на «других» точках, т.е. тех точках, которые имеют коррелирующий шум с шумом в этой одной точке.  может представлять «локальную неэффективность фильтра шумоподавления». Здесь «информация об эффективности фильтра» может быть выражена в следующих формах:
может представлять «локальную неэффективность фильтра шумоподавления». Здесь «информация об эффективности фильтра» может быть выражена в следующих формах:
• Для каждого местоположения, оценка того, сколько шума было удалено посредством шумоподавляющего фильтра (либо в относительных или в абсолютных значениях). Это можно выразить через (диагональный элемент)  («относительное»), соотв. корню из диагонального элемента , умноженного на диагональный элемент («абсолютное»).
(«относительное»), соотв. корню из диагонального элемента , умноженного на диагональный элемент («абсолютное»).
• Для каждого местоположения, оценка того, сколько шума остается после шумоподавляющего фильтра.
• Новая оценка ковариаций шума после операции шумоподавляющего фильтра, например, через  , или непосредственно через
, или непосредственно через  .
.
• Для каждого местоположения, оценка того, сколько информации об анатомической структуре было удалено (или повреждено, изменено) посредством такой обработки шумоподавляющей фильтрацией (или наоборот, т.е. сколько остается неизменным).
Эта информация часто может быть извлечена из (алгоритма) операции шумоподавления.
Приведем примеры этого:
• Как показано в Guido Gerig, Olaf Kubler, Ron Kikinis и Ferenc A. Jolesx,
Nonlinear Anisotropic Filtering of MRI Data, IEEE-TMI, том 11(2), 221-232 (1992) («Gerig»), неэффективность фильтра может равняться (1- t
t ), где
), где  может быть сокращенным обозначением для с(х +
может быть сокращенным обозначением для с(х +  , y,t)+с(х – , y,t)+с(х,y +
, y,t)+с(х – , y,t)+с(х,y +  , t)+с(х,y - , t), и функция с определяется уравнениями (2) и (3) цитируемого документа.
, t)+с(х,y - , t), и функция с определяется уравнениями (2) и (3) цитируемого документа.
• Как показано в Punam K. Saha, Jayaram K. Udupa, Scale-Based Diffusive Image Filtering Preserving Boundary Sharpness and Fine Structures, IEEE-TMI, том 20(11), 1140-1155 (2001) («Saha»), обращаясь к уравнению (8) цитируемого документа, неэффективность фильтра можно рассматривать как  .
.
• Как показано в EP815535 («Aach»), фильтр неэффективности может быть привязан к  , где
, где  представляет собой среднее двух элементов вектора
представляет собой среднее двух элементов вектора  , как выражено в конце колонки 9 (параграф 0035) цитируемого документа.
, как выражено в конце колонки 9 (параграф 0035) цитируемого документа.
Мера эффективности может включать в себя оценку того, сколько шума остается. Мера эффективности также может включать в себя оценку локальной деградации структуры. Например, оценка может включать в себя количество удаленной, поврежденной и/или измененной анатомической структуры в каждом местоположении. В другом примере оценка включает количество анатомической структуры в каждом пространственном положении, которое сохраняется и/или не подвергается воздействию. В другом примере, для каждого местоположения, может предоставляться оценка того, сколько шума было удалено с помощью шумоподавляющего фильтра (либо в относительных или в абсолютных значениях). В еще одном примере, для каждого местоположения также предоставляется оценка того, сколько шума остается после шумоподавления с помощью фильтра. Альтернативно, мера эффективности может включать в себя новую оценку ковариаций шума после операции шумоподавляющего фильтра. Кроме того, для каждого местоположения, может быть предоставлена оценка того, сколько информации об анатомической структуре было удалено (или повреждено, изменено) посредством такой обработки шумоподавляющей фильтрацией (или наоборот, т.е. сколько остается неизменным). Информация о шумоподавлении F может быть представлена в виде матрицы значений, лежащих в диапазоне между 0 и 1 для каждого местоположения изображения, где нулевое значение представляет, что весь шум удален из местоположения изображения, до значения единица, представляющего отсутствие изменений в частично реконструированном изображении. Блок 20 реконструкции использует информацию об эффективности фильтра для регулировки параллельной реконструкции, такой как пересмотр оценки регуляризации, добавления дополнительного канала данных в параллельную реконструкцию, и т.п. Фильтрация может быть увеличена в областях с шумами и снижена в областях свободных от шума.
Система включает в себя один или несколько процессоров 28, таких как на рабочей станции 30. Рабочая станция 30 включает в себя электронный процессор или электронное устройство 28 обработки, дисплей 32, который отображает изображения, меню, панели и пользовательские элементы управления, и, по меньшей мере, одно устройство 34 ввода, которое вводит выбранные медицинским работником элементы. Рабочая станция 30 может быть настольным компьютером, портативным компьютером, планшетным ПК, мобильным вычислительным устройством, смартфоном, и т.п. Устройство 34 ввода может быть клавиатурой, манипулятором типа «мышь», микрофоном и т.п. Дисплей 32 включает в себя компьютерный монитор, телевизионный экран, сенсорный экран, сенсорный электронный дисплей, электронно-лучевую трубку (ЭЛТ), запоминающую ЭЛТ, дисплей с плоским экраном, вакуумный флуоресцентный дисплей (VF), светодиодный (LED) дисплей, электролюминесцентный дисплей (ELD), плазменные панели (PDP), жидкокристаллический дисплей (LCD), дисплеи (OLED) на органических светодиодах, проектор и т.п.
Блок 20 реконструкции и блок 24 шумоподавления соответствующим образом реализуются посредством электронного устройства обработки данных, такого как электронный процессор или электронное устройство 28 обработки рабочей станции 30, или с помощью сетевого серверного компьютера, функционально связанного с рабочей станцией 30 через сеть или тому подобное. Блок 20 реконструкции выполнен с возможностью выполнения способов распределенной обработки данных, таких как распределенные процессоры или многоядерные процессоры. Кроме того, методы БПФ, параллельной реконструкции и шумоподавления соответствующим образом реализованы с использованием невременного носителя хранения, хранящего инструкции (например, программное обеспечение), читаемого электронным устройством обработки данных и исполняемого электронным устройством обработки данных для выполнения описанных методов БПФ, параллельной реконструкции и шумоподавления.
Как показано на ФИГУРЕ 2, один из способов использования варианта осуществления итеративной параллельной реконструкции с обратной связью от шумоподавления представлен на блок-схеме. На этапе 36, РЧ приемники 12 принимают МР данные. МР данные включает в себя МР данные многоканальных РЧ-катушек 8. МР данные преобразуются в пространство изображения, например с помощью БПФ, на этапе 38 посредством одного или нескольких процессоров 28.
МР данные, преобразованные с помощью БПФ, частично реконструируется блоком 20 реконструкции на этапе 40. Блок 20 реконструкции частично реконструирует изображение, сохраненное в памяти 22, используя методы параллельной реконструкции, такие как SENSE, GRAPPA и т.п. первоначальная реконструкция генерирует изображение из МР данных, преобразованных с помощью БПФ. Последующие итерации пересматривают изображение, основываясь на преобразованных с помощью БПФ МР данных, изображении после шумоподавления, и обратной связи от блока 24 шумоподавления. Обратную связь от шумоподавления можно использовать для пересмотра оценки регуляризации. Обратная связь может входить в метод параллельной реконструкции в качестве дополнительного канала данных. Решение выполнять итерацию реконструкции принимается на этапе 42. Решение основывается используемом методе параллельной реконструкции и использует пороговое минимальное изменение в изображении или пороговое количество итераций.
Изображение из параллельной реконструкции фильтруется по шуму блоком 24 шумоподавления. Шумоподавляющий фильтр очищает от шума изображение и предоставляет пространственно локализованную меру эффективности фильтра. Мера эффективности обеспечивает обратную связь с блоком 20 реконструкции. Меры эффективности или эффективность фильтра могут включать в себя оценки локальных достигнутых уровней шумоподавления. Меры могут включать в себя оценки локальной деградации структуры. Мера может быть выражена в виде матрицы значений.
Изображение от параллельной реконструкции может отображаться на дисплее 32 или храниться в системе управления памятью, такой как система архивации и передачи изображений (PACS), рентгенологическая информационная система (RIS), и т.п.
Следует иметь в виду, что применительно к конкретным иллюстративным вариантам осуществления, представленным в данном описании, определенные структурные и/или функциональные признаки описаны как включенные в состав определенных элементов и/или компонентов. Однако предполагается, что эти функции могут, с таким же или аналогичным полезным эффектом, также подобным образом быть включены в другие элементы и/или компоненты в случае необходимости. Следует также иметь в виду, что различные аспекты иллюстративных вариантов осуществления могут избирательно использоваться при необходимости для достижения других альтернативных вариантов осуществления, подходящих для желаемых применений, эти другие альтернативные варианты осуществления тем самым реализуют соответствующие преимущества аспектов, заключенных в них.
Следует также иметь в виду, что отдельные элементы или компоненты, описываемые в настоящем документе, могут иметь свою функциональность, соответствующим образом реализованную посредством оборудования, программного обеспечения, аппаратного обеспечения, программного обеспечения или их сочетания. Кроме того, следует иметь в виду, что некоторые элементы, описанные в настоящем документе, как внедренные вместе, могут при подходящих условиях быть независимыми элементами или иным образом разделенными. Кроме того, множество конкретных функций, описанных как выполняемые одним конкретным элементом, могут осуществляться с помощью множества различных элементов, действующих независимо друг от друга, для осуществления отдельных функций, или некоторые отдельные функции могут быть разделены и осуществляться с помощью множества различных элементов, действующих совместно. С другой стороны, некоторые элементы или компоненты, иным образом описанные и/или показанные здесь как отличные друг от друга могут быть физически или функционально объединены в случае необходимости.
Словом, данное описание изложено со ссылкой на предпочтительные варианты осуществления. Очевидно, после прочтения и понимания существующей спецификации возникнут другие модификации и изменения. Предполагается, что изобретение будет истолковано как включающее все такие модификации и изменения постольку, поскольку они входят в объем прилагаемой формулы изобретения или эквивалентны ей. А именно, следует иметь в виду, что ряд раскрытых выше и другие признаки и функции, или их варианты, могут быть объединены при желании во многих других различных системах или применениях, и также, что различные сейчас непредвиденные или неожиданные альтернативы, модификации, вариации или усовершенствования в них, которые как так же предполагается, охватываются следующей формулой изобретения, могут быть сделаны впоследствии специалистами в данной области.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРАЛЛЕЛЬНАЯ МУЛЬТИСРЕЗОВАЯ МР-ВИЗУАЛИЗАЦИЯ С ПОДАВЛЕНИЕМ АРТЕФАКТОВ БОКОВОЙ ПОЛОСЫ ЧАСТОТ | 2016 |
|
RU2702859C2 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ РЕКОНСТРУКЦИИ МАГНИТНО-РЕЗОНАНСНОГО ИЗОБРАЖЕНИЯ | 2015 |
|
RU2626184C2 |
| СИСТЕМА МНОГОКАДРОВОЙ МАГНИТНО-РЕЗОНАНСНОЙ (МР) ТОМОГРАФИИ И СПОСОБ ЕЕ ФУНКЦИОНИРОВАНИЯ | 2015 |
|
RU2697994C2 |
| УДАЛЕНИЕ АРТЕФАКТОВ ИЗОБРАЖЕНИЙ ПРИ SENSE-ВИЗУАЛИЗАЦИИ | 2016 |
|
RU2730431C2 |
| УПРАВЛЯЕМАЯ ПОТОКОМ ДАННЫХ КОРРЕКЦИЯ ФАЗОЗАВИСИМЫХ АРТЕФАКТОВ В СИСТЕМЕ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2018 |
|
RU2764643C2 |
| БЫСТРАЯ ПАРАЛЛЕЛЬНАЯ РЕКОНСТРУКЦИЯ ДЛЯ ПРОИЗВОЛЬНЫХ ТРАЕКТОРИЙ К-ПРОСТРАНСТВА | 2011 |
|
RU2575135C2 |
| МР (МАГНИТНО-РЕЗОНАНСНАЯ) ТОМОГРАФИЯ МЕТОДОМ PROPELLER C ПОДАВЛЕНИЕМ АРТЕФАКТОВ | 2015 |
|
RU2707661C2 |
| МР-ТОМОГРАФИЯ, ИСПОЛЬЗУЮЩАЯ ПАРАЛЛЕЛЬНОЕ ПОЛУЧЕНИЕ СИГНАЛА | 2010 |
|
RU2523687C2 |
| ПОКАНАЛЬНОЕ СНИЖНИЕ НАСЫЩЕННОСТИ АРТЕФАКТАМИ В ПАРАЛЛЕЛЬНОМ МРТ | 2013 |
|
RU2624401C2 |
| ИНТЕРВЕНЦИОННАЯ МР-ТОМОГРАФИЯ С КОМПЕНСАЦИЕЙ ДВИЖЕНИЯ | 2010 |
|
RU2580189C2 |
Использование: для магнитно-резонансной визуализации. Сущность изобретения заключается в том, что система магнитно-резонансной визуализации включает в себя блок шумоподавления и блок реконструкции. Блок шумоподавления очищает от шума компоненту изображения и предоставляет пространственно локализованную меру эффективности шумоподавления. Блок реконструкции итеративно реконструирует выходное изображение из принятых МР данных, обработанных с помощью быстрого преобразования Фурье (БПФ) и при последующих итерациях включает очищенную от шумов компоненту изображения и пространственно локализованную меру эффективности шумоподавления. Технический результат: улучшение качества изображения за счет использования шумоподавляющего фильтра. 6 н. и 13 з.п. ф-лы, 2 ил.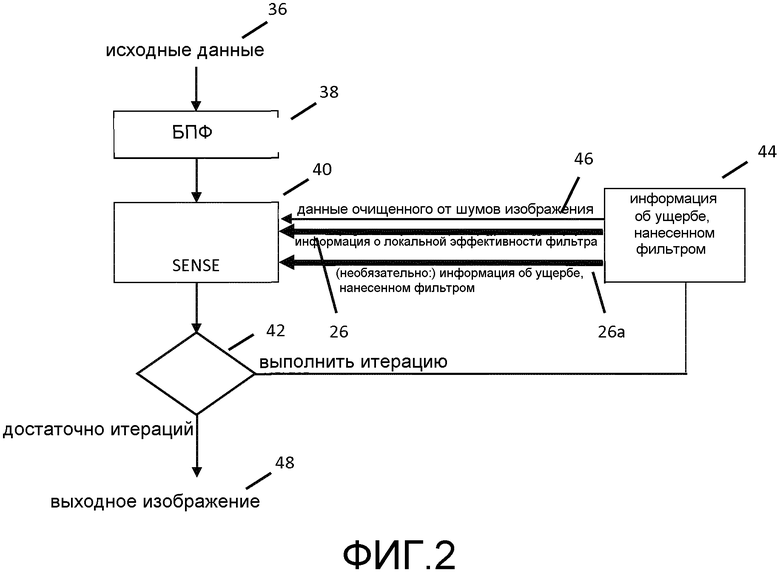
1. Система (1) магнитно-резонансной визуализации, содержащая:
блок (24) шумоподавления, выполненный с возможностью очищать от шума частично реконструированное изображение и предоставлять меру эффективности шумоподавления, причем эффективность шумоподавления содержит оценку количества информации, относящейся к анатомической структуре, которая была удалена или повреждена, или затронута блоком шумоподавления; и
блок (20) реконструкции, выполненный с возможностью итеративно реконструировать принятые параллельные MP данные с помощью реконструкции методом параллельной визуализации и, при последующих итерациях, очищенного от шумов частично реконструированного изображения, и меры эффективности шумоподавления для генерации выходного изображения.
2. Система (1) по п. 1, в которой итеративная реконструкция включает в себя кодирование чувствительности (SENSE).
3. Система (1) по п. 1, в которой мера включает в себя оценку локально достигнутого уровня шумоподавления.
4. Система (1) по п. 1, в которой мера включает в себя оценку локальной деградации структуры.
5. Система (1) по п. 4, в которой мера включает в себя матрицу значений, которая представляет количество удаленного шума для каждого местоположения частично реконструированного изображения.
6. Система (1) по п. 5, в которой мера пересматривает оценку регуляризации итеративной реконструкции.
7. Система (1) по п. 6, в которой итеративная реконструкция включает в себя меру как дополнительный канал ввода.
8. Система (1) по п. 1, в которой принятые MP-данные включают в себя множество местоположений наложения МР-данных.
9. Способ магнитно-резонансной визуализации, включающий в себя:
шумоподавление (44) частично реконструированного изображения и предоставление меры эффективности шумоподавления; причем эффективность шумоподавления дополнительно предоставляющая оценку количества информации об анатомической структуре, которая была удалена или повреждена, или затронута шумоподавлением;
итеративную реконструкцию (40) частично реконструированного изображения на основе принятых параллельных MP данных (36), очищенного от шумов частично реконструированного изображения и меры эффективности шумоподавления.
10. Способ по п. 9, в котором итеративная реконструкция (40) включает в себя кодирование чувствительности (SENSE).
11. Способ по п. 9, в котором шумоподавление (44) включает в себя:
оценку локально достигнутого уровня шумоподавления.
12. Способ по п. 11, в котором шумоподавление (44) включает в себя:
оценку локальной деградации структуры.
13. Способ по п. 12, в котором шумоподавление (44) включает в себя:
построение матрицы значений, которые представляют количество удаленного шума для каждого местоположения изображения.
14. Способ по п. 9, дополнительно включающий в себя:
пересмотр оценки регуляризации итеративной реконструкции на основе шумоподавления.
15. Способ по п. 14, в котором итеративная реконструкция использует дополнительный канал ввода, который включает в себя меры эффективности шумоподавления.
16. Невременный машиночитаемый носитель хранения, содержащий программное обеспечение, которое предоставляет сигнал управления одному или нескольким электронным устройствам (28) обработки данных для выполнения способа по п. 15.
17. Электронное устройство (28) обработки данных, выполненное с возможностью выполнения способа по п. 9.
18. Система (1) магнитно-резонансной визуализации, содержащая:
один или несколько процессоров (28), выполненных с возможностью:
принимать (36) параллельные магнитно-резонансные (MP) данные;
реконструировать (40) MP данные в компоненту изображения;
очищать (44) от шумов компоненты изображения, предоставлять пространственно локализованную меру эффективности шумоподавления, которая содержит оценку количества информации об анатомической структуре, которая была удалена, или повреждена, или изменена шумоподавлением;
итеративно реконструировать выходное изображение с использованием метода параллельной реконструкции на основе MP данных, очищенной от шумов компоненты изображения и пространственно локализованной меры эффективности шумоподавления; и
дисплей (32), выполненный с возможностью отображать выходное изображение.
19. Система (1) магнитно-резонансной визуализации, содержащая:
блок (24) шумоподавления, выполненный с возможностью очищать от шума частично реконструированное изображение и предоставлять меру эффективности шумоподавления; и
блок (20) реконструкции, выполненный с возможностью итеративно реконструировать принятые параллельные MP данные с помощью реконструкции методом параллельной визуализации и, при последующих итерациях, очищенного от шума частично реконструированного изображения и меры эффективности шумоподавления для генерации выходного изображения, причем итеративная реконструкция включает в себя

где pi+1 - следующее итерационное изображение pi, S - матрица чувствительности катушки, Sh - эрмитова транспозиция S.
| US 20090263001A1, 22.10.2009 | |||
| CN 101067650A, 07.11.2007 | |||
| CN 101961242A, 02.02.2011 | |||
| WO 9946731A1, 16.09.1999 | |||
| ПОДАВЛЕНИЕ АРТЕФАКТА ПРИ МНОГОКАТУШЕЧНОЙ МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ | 2007 |
|
RU2434238C2 |
| RU 2009140604A, 10.06.2011. | |||

