Изобретение относится к локационному оборудованию, применяемому при строительстве скважин методом бестраншейной технологии, и используется в системах позиционирования для горизонтально-направленного бурения.
Известно, что возможности электронного зонда, размещаемого в головке бурового инструмента, по дистанции (глубине) устойчивой передачи сигнала на приемное устройство ограничены уровнем промышленных электромагнитных помех в точке приема, и что уровень спектральных составляющих помех может сильно отличаться друг от друга в разных участках местности. Для увеличения соотношения уровня сигнала принимаемых данных к уровню помех для конкретных условий бурения используются электронные зонды, наиболее подходящие по рабочей частоте, на которой уровень промышленных помех в точке бурения минимален.
Известен электронный зонд типа FX/FXL для системы локации F2 производства компании DCI США, состоящий из блока питания в металлическом корпусе и соединенного с последним пластмассового корпуса, в котором размещены измерительный блок, включающий в себя датчик наклона продольной оси по отношению к горизонту, датчик вращения или крена ("часов"), импульсный стабилизатор, а также блок обработки сигналов на основе микроконтроллера и антенное устройство в виде усилителя мощности (антенного драйвера) с ферритовой антенной. При этом блок обработки сигналов служит и для формирования сигнала возбуждения антенны, передающей сигналы датчиков на поверхность. Все перечисленные элементы, помещенные в пластиковый корпус, залиты влагостойким компаундом. Пластиковый корпус обеспечивает свободное распространение силовых линий переменного магнитного поля. Буровая головка имеет участок с продольными сквозными щелями для беспрепятственного выхода магнитных силовых линий. [http://gnb-electronics.ru/oborudovanie-gnb/sonde-digitrak-f2-f5/fxl12/ опубл. 10. 06. 2018 г.] [1]
Недостатком такого зонда, который имеет только одну рабочую частоту, является недоступность выбора оптимальной частоты, что сужает его эксплуатационные возможности и снижает эффективность работы зонда из-за влияния промышленных электромагнитных помех.
Известен электронный зонд, содержащий датчик угла наклона и датчик вращения бурового инструмента, связанные выходами с блоком обработки сигналов датчиков, выполненным на основе первого микроконтроллера. Выход блока подключен к входу блока формирования сигнала определенной частоты для возбуждения магнитной антенны, выполненного на основе второго микроконтроллера. При этом выходы датчиков соединены одновременно со вторым и третьим входами блока, выход которого через антенный усилитель мощности подключен к передающей антенне. Зонд снабжен также блоком формирования напряжений питания от встроенного или внешнего источника. [RU 163669, G01V3/11, опубл. 27.07.2016 г.] [3]
Недостатком данного аналога зонда является то, что зонд не является программируемым: в аналоге изначально встроены фиксированные параметры (частоты), которые пользователь может выбрать перед началом производства работ. Для этого необходимо извлечь зонд из буровой головки и произвести настройку на необходимые параметры рабочей частоты. Поэтому данный аналог ограничен для пользователя изготовителем.
Наиболее близким по технической сущности и достигаемому эффекту является зонд американской компании Digital Control Inc. системы Falcon F5. Он устанавливается непосредственно в буровую головку максимально близко к рабочему инструменту и предназначен для измерения и передачи по радиоканалу на приемник оператора информации о положении бурового инструмента под землей (наклон, поворот), его температуры, остаточной емкости элементов электропитания. Перед установкой зонда в буровую головку программируется рабочая частота его радиоканала по инфракрасному каналу. [http://archive.digital-control.com/russian/products/classic/f5/f5-overview опубл. 01. 06. 2018 г.] [2]
Недостатком данного аналога зонда является то, что в известном решении отсутствует возможность перестройки зонда по рабочей частоте без извлечения из буровой головки, так как зонд имеет фиксированные рабочие частоты, для изменения которых необходимо его извлечь из буровой головки. Отсутствует возможность изменения таких параметров, как мощность излучения радиоканала, режим «засыпания» (отключения электропитания и, при необходимости, возобновления). Кроме того, при установке в буровые головки с геометрией продольных щелей, не соответствующей рекомендованной производителем (ряд головок для работы в скальных породах, тяжелых грунтах), происходит большое потребление энергии от батареи питания, что значительно сокращает время работы зонда от одного комплекта электропитания. Программирование зонда осуществляется по инфракрасному каналу, и это не позволяет, например, изменять рабочие частоты передачи по радиоканалу на приемник оператора информации о положении бурового инструмента под землей при установленном в буровую головку зонде.
Техническими проблемами предлагаемого решения являются расширение возможности пользователя по изменению параметров зонда с целью оптимизации их под конкретный проект, создание зонда для буровой головки, обеспечивающего указанные выше параметры, устранение недостатков аналогов.
Техническими результатами заявленного изобретения являются повышение надежности и эффективности работы буровой головки, обеспечение возможности программирования мощности зонда (программное управление изменением мощности передатчика зонда), обеспечение возможности программирования режима засыпания / не засыпания зонда (программное управление режимом электропитания зонда), обеспечение возможности изменения рабочей частоты взаимодействия зонда и приемника оператора на любую другую во время бурения без изъятия зонда из головки бурения, обеспечение режима адаптации к буровой голове (насколько хорошо она пропускает радиосигнал), обеспечение возможности определения системы управления, которая программирует зонд.
Указанные технические результаты достигаются тем, что в программируемом универсальном зонде содержащем корпус с установленным в нем управляемым источником электропитания для обеспечения узлов зонда питающим напряжением, контроллер, включающий систему акселерометрических датчиков, микроконтроллер и температурный датчик, антенный узел, состоящий из ферритовой передающей антенны, и измеритель излучаемой мощности, состоящий из датчика тока с усилителем для измерения потребляемой мощности антенным узлом, согласно предлагаемому изобретению антенный узел оснащен силовыми ключами и усилителем входных сигналов, а ферритовая антенна выполнена приемопередающей, с возможностью приема параметров работы зонда в режиме программирования и с возможностью передачи информации на приемник в режиме работы, при этом приемник и программируемый универсальный зонд имеют совместимый протокол приёма-передачи данных.
Расширение возможности пользователя по изменению параметров зонда с целью оптимизации их под конкретный проект осуществляется за счет возможности программирования параметров зонда, таких, как программирование мощности зонда (программное управление изменением мощностью передатчика зонда), программирование режима засыпания / не засыпания зонда (программное управление режимом электропитания зонда, возможность изменения рабочей частоты взаимодействия зонда и приемника оператора на любую другую во время бурения без изъятия зонда из головки бурения, наличие режима адаптации к буровой голове (насколько хорошо она пропускает радиосигнал), определение системы управления, которая программирует зонд. Возможность указанного выше программирования обеспечивается за счет того, что в меню приемника имеющего совместимый протокол приёма-передачи данных системы СЕНСЕ, устанавливается значение параметров и режимов работы зонда: уровень мощности излучения, режим засыпания, рабочая частота, разрешение смены частоты в процессе бурения. Для осуществления программирования по команде оператора о завершении установки параметров приемник формирует кодовую посылку, в которой каждому из параметров отведено свое строго определенное место. В кодовую посылку автоматически добавляется информация о модели программирующего приемника. Кодовая посылка передается приемником, непрерывно повторяясь в виде модулированного низкочастотного электромагнитного излучения. После включения программируемого универсального зонда, он переходит на 10 секунд в режим приема и «ожидает» кодовой посылки от приемника. В случае ее отсутствия, либо несоответствующего формата, зонд через 10 секунд переходит в режим излучения в соответствии с ранее запрограммированными параметрами. В случае приема кодовой посылки от приемника соответствующего формата антенным узлом зонда, закодированные в ней параметры сохраняются в памяти микроконтроллера зонда, и зонд переходит к работе в соответствии с вновь полученными параметрами.
Программирование мощности зонда осуществляется передачей кодовой посылки от приемника в виде низкочастотного электромагнитного сигнала, далее который принимается антенным узлом, при этом происходит декодирование и распознавание кодовой посылки в микроконтроллере зонда. В соответствии с заданным уровнем мощности излучения, микроконтроллер устанавливает предельно допустимую подводимую мощность источника электропитания. Для этого измеряется ток потребления и изменяется величина питающего его напряжение таким образом, чтобы подводимая мощность от источника электропитания была постоянной. Измерение тока потребления зонда осуществляется датчиком тока с усилителем, выход которого связан с микроконтроллером, управление величиной выходного напряжения и расчет потребляемой мощности осуществляет также микроконтроллер. Работа зонда на разных мощностях, позволяет избежать перегрузок, обеспечить нормальную работу зонда при использовании буровых головок с не оптимальной геометрией щелей (другие зонды автоматически отключаются) и получить максимально эффективный сигнал при применении головок с верным исполнением щелей, т.е. «адаптировать» зонд к параметрам бурового инструмента.
Режим засыпания зонда обеспечивается микроконтроллером и контроллером, включающим систему акселерометрических датчиков. Зонд «засыпает» при условии его неподвижности на продолжении заданного времени. Заданное время поступает при программировании зонда, если оно равно нулю, зонд не засыпает. Неподвижность зонда определяется не изменяющимися данными его системы акселерометрических датчиков, которые выдают информацию в микроконтроллер. Микроконтроллер высчитывает время неподвижного состояния зонда и переводит его в «спящий режим» - через время, которое также может быть заранее задано при программировании с приемника. В этом режиме микроконтроллер переводит в режим малого потребления электропитания все элементы зонда, и сам зонд «засыпает». При этом происходит значительная экономия по электропитанию зонда. Просыпание зонда происходит при начале его перемещения или вращения: система акселерометрических датчиков в этом случае вырабатывает сигнал пробуждения для микроконтроллера, который, в свою очередь, дает разрешения на подключение электропитание зонда.
При необходимости смены частоты передачи сигнала от зонда приемнику (совпадение промышленных частот работающего вблизи с производимыми работами, промышленного оборудования, создающего помехи для зонда и вызывающего некорректную работу), в процессе бурения предусмотрена возможность смены «частоты» методом установки зонда в определенное положение по «часам» (часовой циферблат) на заданное время. В случае получения разрешения на возможность смены частоты, зонд можно перевести в режим программирования путем фиксации положения зонда в определенных позициях «по часам». Для этого последовательно фиксируют положения зонда на «10 часов» в течение периода 15-30 секунд, затем в положении «2 часа» в течение периода 15-30 секунд, затем в положении «7 часов» в течение периода 15-30 секунд акселерометры подают сигнал микроконтроллеру на переход в режим программирования. Затем зонд устанавливается в положение по часам, которое соответствует желаемой частоте. (Например, при переходе на частоту 30 кГц нужно выставить положение «5 часов»). После этого частота переключается на приемнике путем ручного выбора в меню на индикаторе приемника посредством клавиатуры, после чего необходимо зафиксировать положение зонда на «9 часов» для подтверждения переключения и вывода зонда из режима программирования. После возвращения в режим локации приемника последний начинает отображать актуальную информацию на запрограммированной частоте.
Для запрета на смену частоты в кодовой посылке от Приемника - Зонду присутствует соответствующая информация, которая учитывается программой микроконтроллера. Кроме того, в кодовой посылке присутствует и информация о модели программирующего приемника, поэтому смена частоты возможна только на допустимую для данной модели зонда.
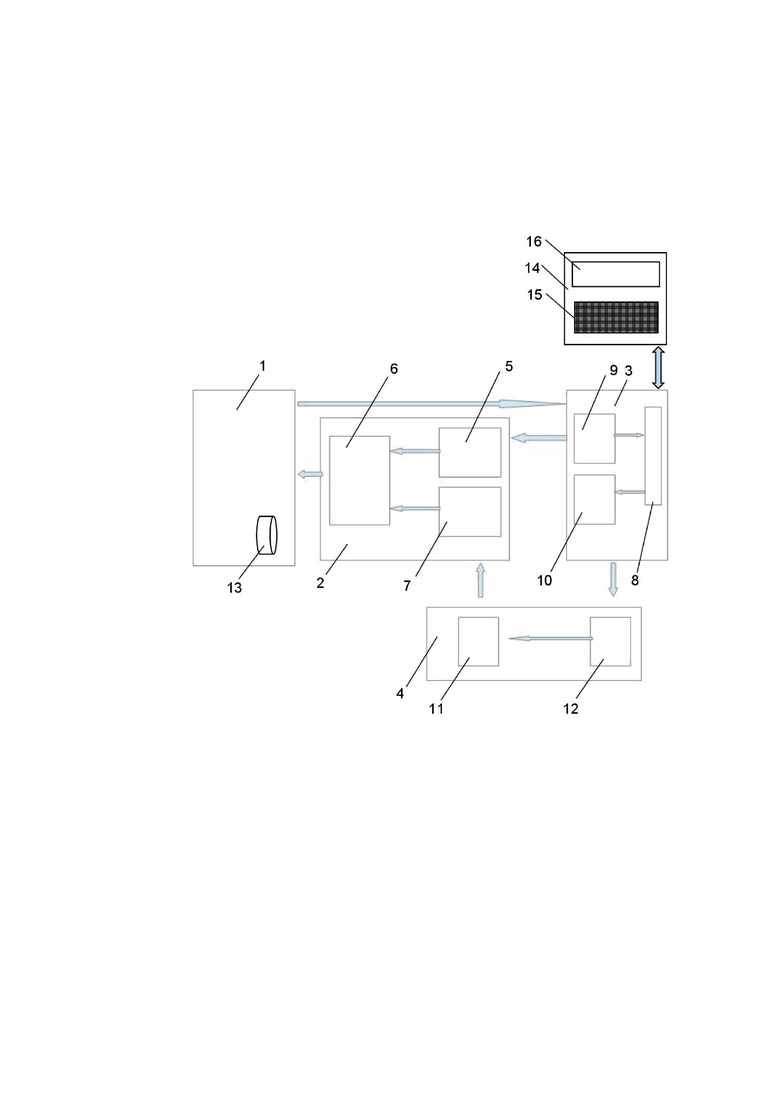
Программируемый универсальный зонд иллюстрируется чертежами, где на фигуре представлена структурная схема устройства.
Программируемый универсальный зонд содержит управляемый источник электропитания 1 (фигура), контроллер 2, антенный узел 3, измеритель излучаемой мощности 4. Управляемый источник электропитания 1 выполнен с возможностью обеспечения всех узлов программируемого универсального зонда питающим напряжением. Величина питающего напряжения, подаваемого на антенный узел 3, установлена контроллером 2 в соответствии с режимом работы зонда. Контроллер 2 включает в себя систему акселерометрических датчиков 5, микроконтроллер 6 и температурный датчик 7. Микроконтроллер 6 выполнен с возможностью приема данных программирования режимов работы программируемого универсального зонда, обработки информации акселерометрических датчиков 5, управления работой всех узлов в соответствии с заданным режимом. Антенный узел 3 состоит из ферритовой приемо-передающей антенны 8, силовых ключей 9 и усилителя входных сигналов 10. В режиме программирования приемо-передающая антенна 8 является приемной (принимает параметры работы зонда), в рабочем режиме — передающей (передается информация на приемник). Измеритель излучаемой мощности 4 представляет собой датчик тока 11 с усилителем 12, последний выполнен с возможностью обеспечения измерения потребляемой мощности антенным узлом 3 и использования в режиме адаптации к буровой головке. Управляемый источник электропитания 1 содержит сменные химические элементы 13. Программирование осуществляется с приемника 14 посредством клавиатуры 15 и индикатора 16.
Программируемый универсальный зонд работает следующим образом. Управляемый источник электропитания 1 вырабатывает питающее напряжение для всех узлов. После подачи питания контроллер 2 переводит зонд в режим программирования. Кодовая посылка от приемника в виде низкочастотного электромагнитного сигнала программирования (в котором закодирована информация о режимах работы зонда) от внешнего устройства преобразуется приемо-передающей антенной 8 в электрический сигнал, усиливается антенным узлом 3 и подается на контроллер 2. После получения данных о режимах работы контроллер 2 вырабатывает соответствующие команды, и зонд переходит в режим передачи. Если в течение заданного времени программирование не происходит, зонд переходит в режим передачи в соответствии с последними данными программирования. В режиме программирования можно запрограммировать частоту излучения приемо-передающей антенны 8 (изменяется частота соответствующих сигналов, вырабатываемых контроллером 2 для антенного узла 3), мощность излучения, определяющаяся величиной напряжения, подаваемого на антенный узел 3, устанавливающаяся контроллером 2, режим «засыпания», т.е. время нахождения зонда без движения до его отключения с целью экономии электроэнергии источника; протокол передачи данных (зонд может быть совместим с различными системами локации (даже разных производителей); включение режима адаптации к буровой головке. Режим адаптации к буровой головке в зонде реализован возможностью измерения и поддержания постоянной заданной потребляемой мощности антенным узлом 3, то есть, программируя потребляемую мощность можно снизить возможность неэффективных потерь энергии (соответственно уменьшается дальность обнаружения зонда до оптимальной величины) при работе с буровыми головками, у которых геометрия продольных щелей не соответствует рекомендации производителя (заужены, укорочены или смещены), и, наоборот, при размерах продольных щелей, превышающих рекомендованные, увеличивается дальность обнаружения зонда с сохранением потребляемой мощности.
Программируемый универсальный зонд используется следующим образом. В меню приемника 14, например, системы SNS производитель ООО «СЕНСЕ ГНБ» [http://sense-inc.ru/] устанавливают значение параметров и режимов работы зонда: уровень мощности излучения, режим засыпания, рабочая частота, разрешение смены частоты в процессе бурения. По команде оператора о завершении установки параметров, приемник 14 формирует кодовую посылку в виде низкочастотного электромагнитного сигнала, в которой каждому из параметров отведено свое строго определенное место. В кодовую посылку автоматически добавляется информация о модели программирующего приемника 14. Кодовая посылка передается приемником 14, непрерывно повторяясь в виде модулированного низкочастотного электромагнитного излучения. После установки в зонд сменных химических элементов 13, зонд переходит на 10 секунд в режим приема и «ожидает» кодовой посылки. В случае ее отсутствия, либо несоответствующего формата, зонд через 10 секунд переходит в режим излучения в соответствии с ранее запрограммированными параметрами. В случае приема посылки соответствующего формата антенным узлом зонда закодированные в ней параметры сохраняются в памяти микроконтроллера 6 зонда, и зонд переходит к работе в соответствии с вновь полученными параметрами. Прием низкочастотного электромагнитного сигнала в зонде осуществляется антенным узлом 3, декодирование и распознавание посылки происходит в микроконтроллере 6 зонда. В соответствии с заданным уровнем мощности излучения, микроконтроллер 6 устанавливает предельно допустимую подводимую мощность электропитания. Для этого: измеряется ток потребления и изменяется величина питающего его напряжения измерителем излучаемой мощности 4 таким образом, чтобы подводимая мощность была постоянной. Измерение тока потребления зонда осуществляется датчиком тока 11 с усилителем 12, выход которого связан с микроконтроллером 6, управление величиной выходного напряжения и расчет потребляемой мощности осуществляет микроконтроллер 6. Таким образом, реализуется работа зонда на разных мощностях, одновременно это позволяет избежать перегрузок, обеспечить нормальную работу зонда при использовании буровых головок с неоптимальной геометрией щелей (обычно другие зонды автоматически отключаются) и получить максимально эффективный сигнал при применении головок с верным исполнением щелей, т. е. «адаптировать» зонд к параметрам бурового инструмента. Режим засыпания обеспечивается контролером 2, включающим в себя микроконтроллер 6 и систему акселерометрических датчиков 5. Зонд «засыпает» при условии его неподвижности на продолжении заданного времени. Заданное время устанавливается при программировании зонда: если оно равно нулю, зонд не засыпает. Неподвижность зонда определяется неизменяющимися данными его системы акселерометрических датчиков 5, которые выдают информацию в микроконтроллер 6. Микроконтроллер 6 высчитывает время неподвижного состояния зонда и переводит его в «спящий режим» - через время, которое выставлено приемником 14. В этом режиме микроконтроллер 6 переводит в режим малого потребления все элементы зонда и сам «засыпает». Просыпание зонда происходит при начале его перемещения или вращения: система акселерометрических датчиков 5, в этом случае вырабатывает сигнал пробуждения для микроконтроллера 6. В процессе бурения предусмотрена возможность смены частоты методом установки зонда в определенное положение по «часам» на заданное время. В случае получения разрешения на возможность смены частоты, зонд можно перевести в режим программирования путем фиксации положения зонда в определенных позициях «по часам».
Сам процесс состоит из нескольких последовательных действий. При последовательной фиксации положения зонда на «10 часов» в течение периода 15-30 секунд, затем в положении «2 часа» в течение периода 15-30 секунд, затем в положении «7 часов» в течение периода 15-30 секунд система акселерометрических датчиков 5 подает сигнал микроконтроллеру на переход в режим программирования. Затем зонд устанавливается в положение «по часам», которое соответствует желаемой частоте (например, при переходе на частоту 30 кГц нужно выставить положение «5 часов»), после чего частота переключается на приемнике 14. Далее фиксируется положение зонда на «9 часов» для подтверждения переключения и вывода зонда из режима программирования. Для запрета на смену частоты в кодовой посылке от приемника 14 - зонду присутствует соответствующая информация, которая учитывается программой микроконтроллера 6, кроме того, в кодовой посылке присутствует и информация о модели программирующего приемника, поэтому смена частоты возможна только на допустимую для данной модели.
При использовании программируемого универсального зонда становится возможным программирование частоты зонда, программирование мощности зонда, программирование режима засыпания/незасыпания зонда, возможность переключения частоты зонда на любую другую во время бурения, наличие режима адаптации к буровой голове. Зонд имеет общепринятую для систем навигации этого класса цилиндрическую форму, разделенную на две части: пластиковую и металлическую. Часть, где располагается антенна, изготавливается из радиопрозрачного пластика, часть для батареи питания — металлическая.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНИК СИСТЕМЫ ЛОКАЦИИ ДЛЯ ГОРИЗОНТАЛЬНО-НАПРАВЛЕННОГО БУРЕНИЯ | 2019 |
|
RU2745480C1 |
| ПРИЕМНИК СИСТЕМЫ ЛОКАЦИИ С ОТОБРАЖЕНИЕМ В ГРАФИЧЕСКОМ ВИДЕ ИНФОРМАЦИИ НА УСТРОЙСТВЕ ИНДИКАЦИИ ПОЛОЖЕНИЯ БУРОВОГО ИНСТРУМЕНТА В РЕАЛЬНОМ ВРЕМЕНИ | 2020 |
|
RU2723927C1 |
| УНИВЕРСАЛЬНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ БУРЕНИЕМ СКВАЖИН | 2002 |
|
RU2211922C1 |
| Удаленное устройство отображения информации приемника системы локации положения бурового инструмента r-box | 2018 |
|
RU2679468C1 |
| Система контроля профиля дна скважины на этапах расширения при строительстве коммуникаций методом горизонтально-направленного бурения | 2021 |
|
RU2771433C1 |
| УСОВЕРШЕНСТВОВАННАЯ СИСТЕМА СВЯЗИ БУРИЛЬНОЙ КОЛОННЫ, КОМПОНЕНТЫ И СПОСОБЫ | 2013 |
|
RU2605105C2 |
| МНОГОКАНАЛЬНЫЙ ПРОГРАММИРУЕМЫЙ ЭЛЕКТРОНЕЙРОСТИМУЛЯТОР | 2004 |
|
RU2286182C2 |
| СИСТЕМА ДЛЯ МОНИТОРИНГА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2007 |
|
RU2337406C1 |
| ПРОГРАММИРУЕМОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРООБОРУДОВАНИЕМ | 2013 |
|
RU2638182C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО МОНИТОРИНГА РАБОЧИХ ПОКАЗАТЕЛЕЙ НАВЕСНОГО ОБОРУДОВАНИЯ КОМБИНИРОВАННОЙ ДОРОЖНОЙ МАШИНЫ И СПОСОБ ЕГО РАБОТЫ | 2023 |
|
RU2807461C1 |
Изобретение относится к локационному оборудованию, применяемому при строительстве скважин методом бестраншейной технологии, и используется в системах позиционирования для горизонтально-направленного бурения. Технический результат - повышение надежности и эффективности работы буровой головки, обеспечение возможности программирования мощности зонда, обеспечение возможности программирования режима засыпания/незасыпания, обеспечение возможности изменения рабочей частоты взаимодействия зонда и приемника оператора на любую другую во время бурения без изъятия зонда из головки бурения, обеспечение режима адаптации к буровой голове, обеспечение возможности определения системы управления, которая программирует зонд. Программируемый универсальный зонд содержит корпус с установленным в нем управляемым источником электропитания для обеспечения узлов зонда питающим напряжением, контроллер, включающий систему акселерометрических датчиков, микроконтроллер и температурный датчик, антенный узел, состоящий из ферритовой передающей антенны, и измеритель излучаемой мощности, состоящий из датчика тока с усилителем для измерения потребляемой мощности антенным узлом. Антенный узел оснащен силовыми ключами и усилителем входных сигналов. Ферритовая антенна выполнена приемопередающей, с возможностью приема параметров работы зонда в режиме программирования и с возможностью передачи информации на приемник в режиме работы. Приемник и программируемый универсальный зонд имеют совместимый протокол приёма-передачи данных. 1 ил.
Программируемый универсальный зонд для буровых головок машин горизонтально-направленного бурения, содержащий корпус с установленным в нем управляемым источником электропитания для обеспечения узлов зонда питающим напряжением, контроллер, включающий систему акселерометрических датчиков, микроконтроллер и температурный датчик, антенный узел, состоящий из ферритовой передающей антенны, и измеритель излучаемой мощности, состоящий из датчика тока с усилителем для измерения потребляемой мощности антенным узлом, отличающийся тем, что антенный узел оснащен силовыми ключами и усилителем входных сигналов, а ферритовая антенна выполнена приемопередающей, с возможностью приема параметров работы зонда в режиме программирования и с возможностью передачи информации на приемник в режиме работы, при этом приемник и программируемый универсальный зонд имеют совместимый протокол приёма-передачи данных.
| ПАРАМЕТРИЧЕСКИЙ СТАБИЛИЗАТОР НАПРЯЖЕНИЯ | 0 |
|
SU163669A1 |
| Электронный коммутатор | 1958 |
|
SU121600A1 |
| ЭЛЕКТРОННЫЙ ЗОНД ДЛЯ БУРОВЫХ ГОЛОВОК УСТАНОВОК ГОРИЗОНТАЛЬНО НАПРАВЛЕННОГО БУРЕНИЯ | 2014 |
|
RU2549944C1 |
| ИСТОЧНИК ДАВЛЕНИЯ ДЛЯ ПРЕССОВАНИЯтг;^;::^^г:.мБ>&,''.^Л'''У1 ?КА | 0 |
|
SU173105A1 |
| US 5337002 A1, 09.08.1994 | |||
| US 6606032 B1, 12.08.2003. | |||

