Изобретение относится к области строительства скважин по технологии горизонтального направленного бурения (ГНБ) и может быть использовано для контроля, автоматического расчета и постоянного отображения необходимой информации на дисплеях приемника и повторителя системы локации при строительстве скважин.
Существующие системы навигации, используемые в технологии ГНБ, имеют в своем составе индикаторы телеметрической информации, носимые в руках локаторщика (навигатора) и устанавливаемые на буровой машине. Информация на них поступает от зонда, находящегося в буровой головке под землей. При этом часть информации, получаемой от зонда отображается постоянно (угол наклона буровой головки, положение по часам, температура зонда, положение зонда в горизонтальной плоскости, уровень заряда батареи зонда), а глубина и удаление от зонда (приемник-зонд) показываются только принудительным нажатием кнопки и только в определенных точках (передняя и задняя точка локации и линия локации). При этом режим «бурение на цель» или «прогнозируемая глубина» включается только через специальное дополнительное меню в приемнике системы локации, что ведет к потере времени и контроля, так как пользователю необходимо выйти из меню локации, где отражается вся информация о процессе бурения.
Известен приемник системы локации положения бурового инструмента производства компании Digitrak Falcon Compact Display, содержащий приемо-передающий узел RF, микропроцессор с микропрограммой, хранящейся во внутренней или/внешней FLASH-памяти, внешнюю или внутреннюю FLASH-память микропроцессора, микропроцессор устройства индикации для обрабатки принятой информации и отображение ее в понятном для человека виде на экране, экран устройства индикации для отображения телеметрической информации. [Пульт бурового мастера «Инструкции по эксплуатации системы локации для горизонтально направленного бурения Digitrak Falcon Compact Display https://dci.zendesk.com/hc/en-us/articles/115005083713-FCD-Operator-s-Manual]
Наиболее близким по технической сущности и достигаемому эффекту является приемник системы локации положения бурового инструмента, производства ООО «СЕНСЕ-ГНБ» содержащий приемо-передающий узел RF, микропроцессор с микропрограммой, хранящейся во внутренной или/внешней FLASH-памяти, внешнюю или внутреннюю FLASH-память микропроцессора, микропроцессор устройства индикации для обрабатки принятой информации и отображение ее в понятном для человека виде на экране, экран устройства индикации для отображения телеметрической информации, передающейся по радиоканалу. [Пульт бурового мастера «Инструкции по эксплуатации системы локации для горизонтально направленного бурения SNS 300t» (страница 37) https://drive.google.com/file/d/0B7yN8I-1jNR3YlpTS1VMVkhSMEk/view]
Недостатками данного приемника системы локации с индикатором телеметрической информации являются ограниченные функциональные возможности, поскольку только часть информации, получаемой от зонда, отображается постоянно (угол наклона буровой головки, положение по часам, температура зонда, положение зонда в горизонтальной плоскости, уровень заряда батареи зонда), а глубина и удаление от зонда (приемник-зонд) показываются только принудительным нажатием кнопки и только в определенных точках (передняя и задняя точка локации и линия локации). При этом режим «бурение на цель» или «прогнозируемая глубина» включается только через специальное дополнительное меню в приемнике системы локации, что ведет к потере времени и контроля, так как пользователю необходимо выйти из меню локации, где отражается вся информация о процессе бурения.
Технической проблемой является создание приемника системы локации положения бурового инструмента, обеспечивающего точное определение положения бурового инструмента с возможностью постоянного отображения всей информации, получаемой им от зонда и автоматическим включением режима «бурение на цель» в момент, когда приемник находится в передней точке локации (впереди текущего положения зонда).
Техническими результатами предлагаемого решения являются улучшение информированности пользователя (локаторщика): обеспечение возможности владения полной информацией о положении зонда в реальном времени, обеспечение постоянного контроля процесса бурения, сокращение времени работы.
Указанные технические результаты достигаются тем, что в приемнике системы локации положения бурового инструмента, содержащем приемо-передающий узел RF, микропроцессор с микропрограммой, хранящейся во внутренней FLASH-памяти, внутреннюю FLASH-память микропроцессора, устройство индикации с отображением угла наклона, заряда батареи, положения по часам, температуры зонда, уровня рабочей мощности зонда и рабочей частоты зонда, согласно заявленному изобретению приемник оснащен дополнительным процессором с микропрограммой расчета и постоянного отображения информации на устройстве индикации, а устройство индикации выполнено в виде информационного поля на экране приемника и повторителя с графическим отображением информации и дополнительно содержит информацию о глубине нахождения зонда, удалении приемника от зонда (по гипотенузе и катету) и местоположении зонда.
Использование в приемнике дополнительного процессора с микропрограммой расчета и постоянного отображения информации на устройство индикации позволяет в реальном времени производить расчет и постоянно отображать в графическом виде информацию на устройстве индикации. Устройство индикации представляет собой информационное поле на экране приемника и повторителя в виде графического отображения получаемой от зонда полной информации для пользователя (локаторщика): угол наклона, заряд батареи, положение по часам, температура зонда, уровень рабочей мощности зонда и рабочей частоты зонда, глубина нахождения зонда, удаление приемника от зонда (по гипотенузе и катету), местоположение зонда. Часть информационных данных (угол наклона и положение по часам) передается на микропроцессор с микропрограммой. Используя его и анализируя уровень входящего сигнала, рассчитывается глубина нахождения зонда (глубина буровой головы), удаление приемника от зонда (удаление в горизонте), местоположение зонда (точка в центре и вектора). При этом, используя дополнительный процессор с микропрограммой расчета и постоянного отображения информации на устройстве индикации, приемник системы локации, получая информацию от 3D антенны и микропроцессора с микропрограммой, постоянно отображает всю необходимую информацию для пользователя (локаторщика), что обеспечивает возможность владеть полной информацией о положении зонда в реальном времени и обеспечить постоянный контроль за процессом бурения.
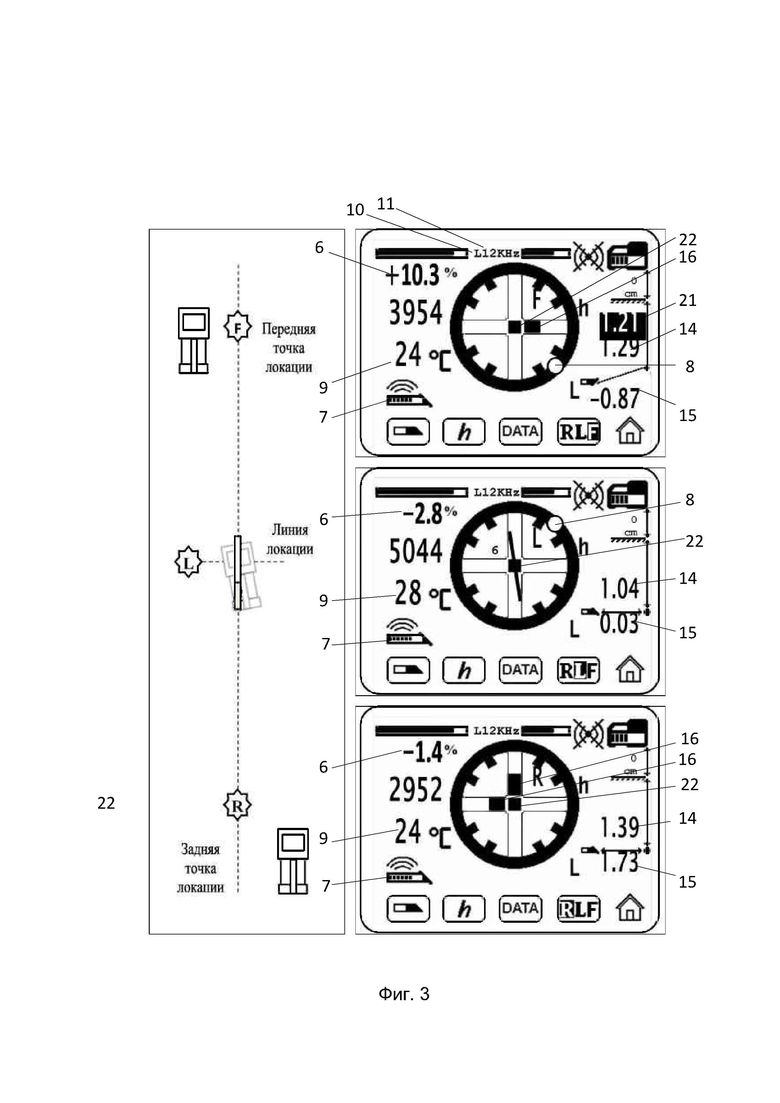
Когда приемник находится впереди зонда на линии бурения, на дисплее автоматически отображается прогнозируемая глубина, на которой окажется зонд, когда он придет в точку (режим «бурение на цель»). Пользователь, не заходя в специальное меню и не активируя расчет предполагаемой глубины, получает на устройстве индикации информацию режима «бурение на цель» непосредственно во время процесса бурения, что сокращает время работы.
Микропроцессор с микропрограммой занят исключительно расчетом местоположения зонда. Дополнительный процессор с микропрограммой расчета и постоянного отображения информации на устройство индикации отображает входящую информацию, переводя ее в графический вид. Таким образом, наличие второго процессора с микропрограммой расчета и постоянного отображения информации на устройство индикации позволяет решить поставленную проблему и обеспечить указанные технические результаты.
Приемник системы локации с отображением в графическом виде информации на устройстве индикации положения бурового инструмента в реальном времени иллюстрируется чертежами, где на фиг. 1 представлена блок-схема, на фиг. 2 - графическое отображение информации на устройства индикации, на фиг. 3 - варианты графического отображения информации на устройстве индикации.
Устройство приемника 1 (фиг. 1) системы локации положения бурового инструмента содержит приемо-передающий узел RF 2 (фиг. 1), с микропроцессором 3 с микропрограммой, хранящейся во внутренней FLASH-памяти 4 и устройством индикации 5. На устройстве индикации 5 отображается угол наклона 6 (фиг. 2, 3), заряд батареи 7, положение по часам 8 (фиг. 3), температура зонда 9, уровень рабочей мощности зонда 10, и рабочая частота зонда 11. Устройство индикации 5 (фиг. 1) представляет собой информационное поле (фиг. 2, 3) на устройстве индикации 5 (фиг. 1) приемника 1 и повторителя 12 в виде графического отображения получаемой от зонда 13 информации о глубине 14 (фиг. 2, 3) нахождения зонда 13 (фиг. 1), удаления 15 (фиг. 2, 3) приемника 1 (фиг. 1) от зонда 13 (по гипотенузе и катету) местоположение 16 (фиг.2) зонда 13 (фиг. 1), при этом приемник 1 имеет дополнительный процессор 17 с микропрограммой расчета и постоянного отображения информации на устройство индикации, расположенной во FLASH-памяти 18. Дополнительный процессор 17 с микропрограммой расчета и постоянного отображения информации на устройство индикации предназначен для расчета и постоянного отображения графической информации на устройстве индикации 5. Для сопряжения и программирования зонда по радиоканалу приемник 1 имеет дополнительную плату 18 для управления антенной 19 связанную с узлом RF 2 и микропроцессором 3. Для приема и обработки сигналов от зонда в процессе бурения в приемнике установлена 3D антенна 20, связанная с процессором 3 и дополнительным процессором 17 с микропрограммой расчета и постоянного отображения информации на устройство индикации.
Устройство работает следующим образом. Зонд 13 системы локации передает информацию на приемник 1 посылками на низкой частоте несколько раз в секунду. Передается следующая информация: угол наклона 6, заряд батареи 7 (батарея зонда), положение по часам 8 (черный круг с метками), температура зонда 9, частота зонда 11 и уровень рабочей мощности зонда 10. Приемник 1, получая сигнал и используя 3D антенну 20 и микропроцессор 3 c микропрошивкой 4 (анализируя силу входящего сигнала), рассчитывает следующие данные: глубину нахождения зонда 14 (глубина буровой головы), удаление 15 приемника 1 от зонда 13 (удаление в горизонте), местоположение 16 зонда 13 (точка 22 в центре и вектора (фиг. 3). Вся информация от зонда 13 в виде информационных посылок принимается 3D антенной 20 и передается на дополнительный процессор 17, обрабатывается им с использованием микропрограммы, находящейся во FLASH-памяти 18, и передается на устройство индикации 5 в графическом виде. Часть информационных посылок (угол наклона 6 и положение по часам 8) передается на процессор 3. Используя часть информационных посылок и анализируя уровень входящего сигнала микропроцессор 3 рассчитывает глубину 14 нахождения зонда 13 (глубина буровой головы), удаление 15 приемника 1 от зонда 13 (удаление в горизонте), местоположение зонда 13 (точка 22 в центре и вектора).
Таким образом, в отличии от аналогов, наличие дополнительного процессора 17 с микропрограммой расчета и постоянного отображения информации на устройство индикации, который, получая информацию от 3Д антенны 20 и процессора 3, отображает всю необходимую информацию для локаторщика на устройство индикации 5, позволяет сохранять постоянный контроль за процессом бурения.
При этом, когда приемник 1 находится впереди зонда 13 на линии бурения, на устройстве индикации 5 автоматически начинает отображаться прогнозируемая глубина 21 (фиг. 3), на которой окажется зонд 13, когда он придет в точку 22 – «бурение на цель».
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНИК СИСТЕМЫ ЛОКАЦИИ ДЛЯ ГОРИЗОНТАЛЬНО-НАПРАВЛЕННОГО БУРЕНИЯ | 2019 |
|
RU2745480C1 |
| Удаленное устройство отображения информации приемника системы локации положения бурового инструмента r-box | 2018 |
|
RU2679468C1 |
| Программируемый универсальный зонд | 2018 |
|
RU2698373C1 |
| Система контроля профиля дна скважины на этапах расширения при строительстве коммуникаций методом горизонтально-направленного бурения | 2021 |
|
RU2771433C1 |
| Локатор для определения местоположения зонда при горизонтально направленном бурении | 2024 |
|
RU2831103C1 |
| УСТРОЙСТВО И СПОСОБ НАВЕДЕНИЯ НА ЦЕЛЬ ПРИ НАПРАВЛЕННОМ БУРЕНИИ | 2013 |
|
RU2600118C2 |
| СИСТЕМА И СПОСОБ ТЕЛЕМЕТРИИ ДАННЫХ МЕЖДУ СОСЕДНИМИ СКВАЖИНАМИ | 2017 |
|
RU2755609C2 |
| ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ СТВОЛА СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ УЛЬТРАЗВУКОВЫХ И МИКРОРЕЗИСТИВНЫХ КАВЕРНОМЕРОВ | 2015 |
|
RU2705629C1 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА С ПРОЦЕССОРНЫМ ЭЛЕКТРОННЫМ КЛЮЧОМ | 2016 |
|
RU2720290C2 |
| ДИНАМИЧЕСКАЯ ГЕНЕРАЦИЯ ВЕКТОРНОЙ ГРАФИКИ И АНИМАЦИЯ ОБОРУДОВАНИЯ НИЗА БУРИЛЬНОЙ КОЛОННЫ | 2004 |
|
RU2347268C2 |


Использование: для локации положения бурового инструмента. Сущность изобретения заключается в том, что приемник системы локации положения бурового инструмента содержит приемо-передающий узел RF, микропроцессор с микропрограммой, хранящейся во внутренней FLASH-памяти, внутреннюю FLASH-память микропроцессора, устройство индикации с отображением угла наклона, заряда батареи, положения по часам, температуры зонда, уровня рабочей мощности зонда и рабочей частоты зонда, при этом приемник оснащен дополнительным процессором с микропрограммой расчета и постоянного отображения информации на устройстве индикации, а устройство индикации выполнено в виде информационного поля на экране приемника и повторителя с графическим отображением информации и дополнительно содержит информацию о глубине нахождения зонда, удалении приемника от зонда (по гипотенузе и катету) и местоположении зонда. Технический результат: обеспечение возможности получения полной информации о положении зонда в реальном времени. 3 ил.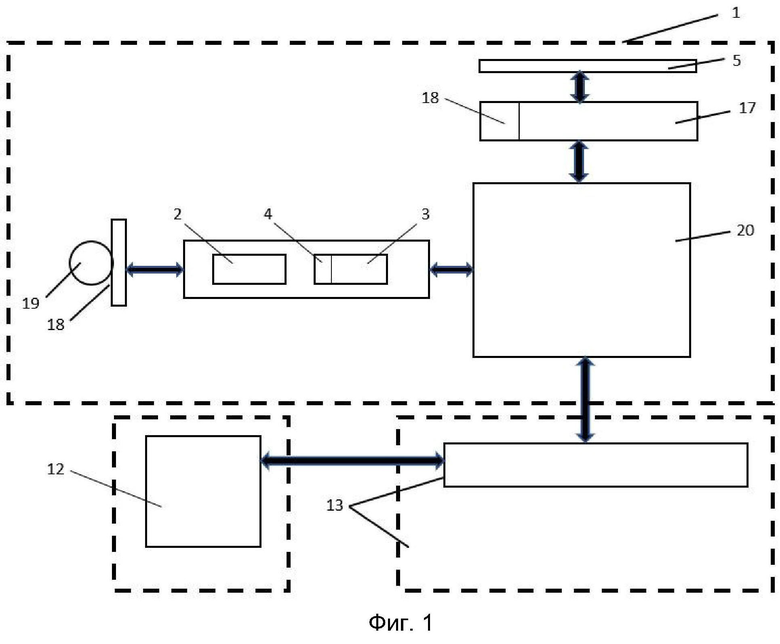
Приемник системы локации положения бурового инструмента, содержащий приемо-передающий узел RF, микропроцессор с микропрограммой, хранящейся во внутренней FLASH-памяти, внутреннюю FLASH-память микропроцессора, устройство индикации с отображением угла наклона, заряда батареи, положения по часам, температуры зонда, уровня рабочей мощности зонда и рабочей частоты зонда, отличающийся тем, что приемник оснащен дополнительным процессором с микропрограммой расчета и постоянного отображения информации на устройстве индикации, а устройство индикации выполнено в виде информационного поля на экране приемника и повторителя с графическим отображением информации и дополнительно содержит информацию о глубине нахождения зонда, удалении приемника от зонда (по гипотенузе и катету) и местоположении зонда.
| ТКАЦКИЙ СТАНОК | 1920 |
|
SU300A1 |
| Удаленное устройство отображения информации приемника системы локации положения бурового инструмента r-box | 2018 |
|
RU2679468C1 |
| Устройство для тренировки спортсменов в прыжках с трамплина на лыжах | 1949 |
|
SU82759A1 |
| КОМПЛЕКСНЫЙ ПРИБОР ДЛЯ УПРАВЛЕНИЯ ГЕОФИЗИЧЕСКИМИ ИССЛЕДОВАНИЯМИ СКВАЖИНЫ И ПЛАНИРОВАНИЯ БУРЕНИЯ | 2013 |
|
RU2620691C1 |
| Способ приготовления составов для ликвидации проколов в резиновых автокамерах | 1938 |
|
SU60780A1 |
| Нож для отсечения нитей | 1986 |
|
SU1391632A1 |

