Изобретение относится к системам контроля углов дна скважины для горизонтально-направленного бурения (ГНБ), применяется при выполнении работ по бестраншейной прокладке инженерных коммуникаций.
Системы локации для ГНБ предназначены для контроля движения буровой головки под землей во время бурения, что позволяет машинисту установки ГНБ вести бурение согласно проекту и не допускать повреждений встречающихся на пути подземных инженерных коммуникаций. Это оборудование, благодаря своей чувствительности, позволяет определить положение буровой головки под землей и точно управлять ей, эффективно обходя при этом препятствия на значительном расстоянии находящиеся под землей объекты, в частности газопроводы, нефтепроводы, водопроводы, телефонные и интернет кабели, коллекторы.
На дальнейшем этапе строительства подземных трубопроводов методом ГНБ, а именно на этапе расширения пилотной скважины, необходим оперативный контроль изменения ее траектории (углов), поскольку при расширении скважины, особенно многократном, любые изменения остаются неизвестными. Факторами, влияющими на такое изменение траектории скважины при расширении, являются, в частности неоднородное геологическое строение грунта вдоль интервала бурения, тип грунта, конструктивные особенности инструмента, буровой раствор. Отсутствие сведений об изменении траектории (углов) скважины может стать причиной аварий (повреждений или невозможности искривления трубы при ее прокладывании), увеличения или срывов сроков бурения.
Из уровня техники аналоги не выявлены.
Технической проблемой является создание системы контроля профиля дна скважины на этапах расширения при строительстве коммуникаций методом горизонтально-направленного бурения, обеспечивающей получение точной информации об углах дна скважины на этапе ее расширения, ее обработку и построение профиля дна скважины.
Техническими результатами предлагаемого решения являются возможность определения и контроля углов траектории скважины после каждого расширения для корректировки геометрии заведения оголовка дюкера в скважину, обеспечение получения реальных статистических данных о геометрии скважины, их обработки и построения профиля дна скважины.
Указанные технические результаты достигаются тем, что система контроля профиля дна скважины на этапах расширения при строительстве коммуникаций методом горизонтально-направленного бурения содержит компьютер, установленное на нем программное обеспечение для обработки и построения профиля дна скважины, выполненное с возможностью подключения к компьютеру устройство контроля углов дна скважины, при этом устройство контроля углов дна скважины состоит из корпуса с установленными в нем акселерометрами, электронной платой с процессором, устройством для записи и хранения информации и источником питания. Устройство контроля углов скважины может иметь соединение с компьютером посредством кабеля.
Измерение и фиксация углов происходит при статическом положении бурильной колонны. После прохождения устройства контроля углов дна скважины через скважину все изменения углов относительно статического (начального) положения точки входа бурильной колонны от акселерометров поступают в процессор для обработки и последующей передачи их в устройство записи и хранения информации. Источник питания обеспечивает бесперебойное функционирование устройства, запись и хранение информации. После прохождения бурильной колонны и ее выхода на поверхность устройство контроля углов дна скважины для горизонтально-направленного бурения извлекается и соединяется с компьютером для обработки и построения профиля дна скважины. Зная длины бурильных труб и углы на соответствующих интервалах, а также, имея в качестве базовых точки входа и выхода бурильной колонны на поверхность, обеспечивается возможность построения профиля дна скважины с точностью ее углов, достаточной для определения потенциально опасных мест, таких как подземные ямы и неоднородность грунта (другой тип почвы, плывун). При последующем изменении диаметра скважины при протаскивании дюкера (сваренные трубы) согласно техническому заданию заказчика с помощью полученной от устройства информации имеется возможность изменения углов дна скважины для безаварийного монтажа последней. Таким образом обеспечиваются возможность определения и контроля углов траектории скважины после каждого расширения для корректировки геометрии заведения оголовка дюкера в скважину, получение реальных статистических данных о геометрии скважины, их обработка и построение профиля дна скважины.
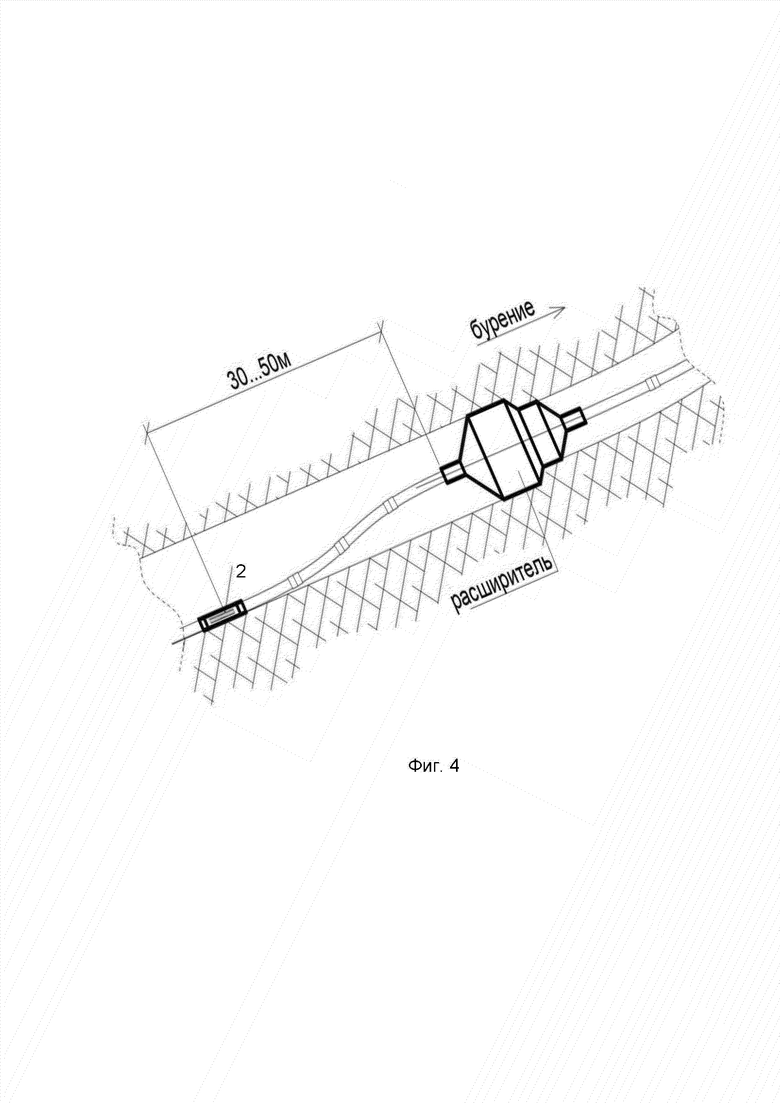
Устройство контроля углов дна скважины для горизонтально-направленного бурения иллюстрируется чертежами, где на фигуре 1 – представлена блок-схема, на фигуре 2 – общий вид со снятой задней крышкой, на фигуре 3 – схематичное расположение элементов, на фигуре 4 – пример использования устройства, на фигуре 5 – компьютер с установленной программой SNS A100 (разработчик ООО «СЕНСЕ ГНБ»)
Система контроля профиля дна скважины на этапах расширения при строительстве коммуникаций методом горизонтально-направленного бурения содержит компьютер 1 (фиг. 1, 5), установленное на нем программное обеспечение для обработки и построения профиля дна скважины, например, программа SNS A100 (разработчик ООО «СЕНСЕ ГНБ») или аналогичное программное обеспечение, обеспечивающее возможность обработки полученных от устройства контроля углов дна скважины 2 (фиг. 1) данных и их обработки. Компьютер 1 выполнен с возможностью подключения к устройству контроля углов дна скважины 2, при этом устройство контроля углов дна скважины 2 состоит из корпуса 3 (фиг. 2), выполненного, например в виде трубы, имеющей переднюю 4 (фиг. 2) и заднюю 5 (фиг. 3) пробки. Внутри корпуса 3 установлены автономный источник питания 6 (фиг. 1, 3), например аккумуляторы. В корпусе 3 установлены акселерометры 7 и 8 (фиг. 1), соединенные с электронной платой и процессором 9 устройством для записи и хранения информации 10. Для обеспечения питанием к электронной платой с процессором 9 подключен автономный источник питания 6. Устройство контроля углов дна скважины 2 может быть соединено с компьютером 1 кабелем 11 для считывания информации и зарядки аккумуляторов во время производства работ в процессе расширения скважины, при этом кабель 9 находится внутри буровой колонны. Кабель 11 имеет подключение к устройству контроля углов дна скважины 2 через разъем 12 (фиг. 1, 2).
Заявленное изобретение работает следующим образом.
В процессе расширения буровая колонна вращается. При вращении акселерометры 7 и 8 передают информацию о начале вращения процессору 9. Процессор 9 при вращении переходит в спящий режим для сохранения заряда аккумуляторов. После остановки вращения на период производства работ по наращиванию штанги буровой машины акселерометры 7 и 8 передают информацию на процессор 9 об отсутствии изменения угла и одновременно передают ему текущие показания угла. Далее процессор 9 принимает информацию и определяет, от какого акселерометра 7 или 8 поступила данная информация, например, если угол от 0 до 30 градусов, то процессор 9 выделяет данные о величине угла от акселерометра 7, если угол больше 30 градусов – от акселерометра 8. Информацию об угле процессор 9 записывает на устройство записи и хранения информации 10. После начала вращения буровой колонны процесс повторяется. И так до выключения прибора (окончания процесса производства работ). Наличие двух акселерометров обусловлено тем, что один более точен на углах от 0 до 40 градусов, другой - от 30 до 90 градусов. После извлечения устройства контроля углов дна скважины 2 из скважины пробку 5 откручивают и к разъему 12 присоединяют кабель 11 для сопряжения с компьютером 1. Данные записываются на компьютер 1. Далее оператор дополнительно вносит в программу информацию о длине штанги. Данные обрабатываются программным обеспечением, например программой SNS A100 (разработчик ООО «СЕНСЕ ГНБ») или аналогичным программным обеспечением, обеспечивающим возможность обработки полученных от устройства контроля углов данных и их обработки, после чего данные выводятся в виде таблицы для анализа и принятия решения о дальнейших действиях по производству работ. Таблица состоит из трех колонок: номер штанги/замера, длина штанги и угол. Используя данные таблицы, оператор с помощью программы строит профиль дна скважины. Имея фактический профиль дна скважины, таблицу с углами и другие параметры, например характеристики трубы (информацию о предельном изгибе трубы и плавучести трубы), оператор принимает решение о дальнейших действиях. Например, при наличии критических углов работник принимает решение о необходимости дополнительного расширения скважины, проходки ее расширителем другого типа и/или мероприятия по балластировки трубы во время протаскивания. Аналогично все работы могут быть проведены с постоянно подключенным компьютером 1 к устройству контроля углов дна скважины 2 посредством кабеля 11, который в этом случае проходит через буровую колонну, что позволяет контролировать углы скважины в режиме реального времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНИК СИСТЕМЫ ЛОКАЦИИ ДЛЯ ГОРИЗОНТАЛЬНО-НАПРАВЛЕННОГО БУРЕНИЯ | 2019 |
|
RU2745480C1 |
| ПРИЕМНИК СИСТЕМЫ ЛОКАЦИИ С ОТОБРАЖЕНИЕМ В ГРАФИЧЕСКОМ ВИДЕ ИНФОРМАЦИИ НА УСТРОЙСТВЕ ИНДИКАЦИИ ПОЛОЖЕНИЯ БУРОВОГО ИНСТРУМЕНТА В РЕАЛЬНОМ ВРЕМЕНИ | 2020 |
|
RU2723927C1 |
| Программируемый универсальный зонд | 2018 |
|
RU2698373C1 |
| Удаленное устройство отображения информации приемника системы локации положения бурового инструмента r-box | 2018 |
|
RU2679468C1 |
| СПОСОБ ДОСТАВКИ ВЗРЫВНЫХ УСТРОЙСТВ С ПОМОЩЬЮ УСТАНОВКИ ГОРИЗОНТАЛЬНО-НАПРАВЛЕННОГО БУРЕНИЯ | 2014 |
|
RU2566531C1 |
| СПОСОБ ДОСТАВКИ ВЗРЫВНЫХ УСТРОЙСТВ С ПОМОЩЬЮ УСТАНОВКИ ГОРИЗОНТАЛЬНО-НАПРАВЛЕННОГО БУРЕНИЯ | 2014 |
|
RU2566355C1 |
| Устройство для корректируемого по направлению расширения пилотной скважины | 2022 |
|
RU2778870C1 |
| ВЫЧИСЛЕНИЕ СКОРОСТИ И ГЛУБИНЫ БУРЕНИЯ ДЛЯ СКВАЖИННЫХ ИНСТРУМЕНТОВ | 2013 |
|
RU2582608C1 |
| ИНСТРУМЕНТ ДЛЯ СЪЕМКИ ПЛАНА БУРЕНИЯ ДЛЯ ТОПОГРАФИЧЕСКОЙ СЪЕМКИ, СИСТЕМА И СВЯЗАННЫЕ С НИМ СПОСОБЫ | 2020 |
|
RU2805584C2 |
| ДАТЧИК МАГНИТНОГО СОПРОТИВЛЕНИЯ ДЛЯ ОБНАРУЖЕНИЯ НАМАГНИЧИВАЕМОЙ КОНСТРУКЦИИ В ПОДЗЕМНОЙ СРЕДЕ | 2014 |
|
RU2671016C2 |




Изобретение относится к системам контроля углов дна скважины для горизонтального направленного бурения (ГНБ), применяется при выполнении работ по бестраншейной прокладке инженерных коммуникаций. Предложена система контроля профиля дна скважины на этапах расширения при строительстве коммуникаций методом горизонтально-направленного бурения, которая содержит компьютер, установленное на нем программное обеспечение для обработки и построения профиля дна скважины, выполненное с возможностью подключения к компьютеру устройство контроля углов дна скважины. При этом устройство контроля углов дна скважины состоит из корпуса с установленными в нем акселерометрами, электронной платой с процессором, устройством для записи и хранения информации и источником питания. Технический результат – обеспечение возможности определения и контроля углов траектории скважины после каждого расширения для корректировки геометрии заведения оголовка дюкера в скважину, обеспечение получения реальных статистических данных о геометрии скважины, их обработки и построения профиля дна скважины. 1 з.п. ф-лы, 5 ил.
1. Система контроля профиля дна скважины на этапах расширения при строительстве коммуникаций методом горизонтально-направленного бурения, содержащая компьютер, установленное на нем программное обеспечение для обработки и построения профиля дна скважины после каждого расширения, выполненное с возможностью подключения к компьютеру устройство контроля углов дна скважины, при этом устройство контроля углов дна скважины состоит из корпуса с установленными в нем акселерометрами, электронной платой с процессором, устройством для записи и хранения информации, полученной в процессе каждого расширения, и источником питания.
2. Система контроля профиля дна скважины на этапах расширения при строительстве коммуникаций методом горизонтально-направленного бурения по п. 1, отличающаяся тем, что устройство контроля углов скважины соединено с компьютером посредством кабеля.
| US 20170138174 A1, 18.05.2017 | |||
| US 4361192 A1, 30.11.1982 | |||
| CA 2976655 A1, 15.02.2018 | |||
| WO 2016022388 A1, 11.02.2016 | |||
| US 6525538 B1, 25.02.2003 | |||
| US 2015345222 A1, 03.12.2015 | |||
| US 20020056201 A1, 16.05.2002. |

