Изобретение относится к системам локации для горизонтального направленного бурения (ГНБ) и применяется при выполнении работ по бестраншейной прокладке инженерных коммуникаций для определения и отслеживания местоположения зонда, установленного в буровой головке.
Системы локации для ГНБ предназначены для контроля движения буровой головки под землей во время бурения, что позволяет машинисту установки ГНБ вести бурение согласно проекту и не допускать повреждений встречающихся на пути подземных инженерных коммуникаций. Это оборудование, благодаря своей чувствительности, позволяет определить положение буровой головки под землей и точно управлять ей, эффективно обходя при этом на значительном расстоянии находящиеся под землей объекты, в частности газопроводы, нефтепроводы, водопроводы, телефонные и интернет кабели, коллекторы. Простота конструкции позволяет быстро освоить принцип работы оборудования.
Известны приемники компании Digitrak Falcon, содержащие 3D антенну (для приема сигнала от зонда), приемо-передающий узел RF, микропроцессор с микропрограммой (для обработки поступающих сигналов от зонда и их интерпретации на экране устройства), экран устройства индикации для отображения информации и ИК порт для сопряжения (соединения) устройства с зондом системы локации. [https://ru.digital-control.com/receivers/digitrak-falcon-f5]
Недостатками данного устройства являются ограниченные функциональные возможности, а именно: сопряжение устройства с зондом с помощью ИК порта создает уникальную пару устройств, и при выходе приемника из строя во время бурения уже невозможно применить другой приемник для продолжения бурения. Это влечет за собой дополнительные временные и материальные затраты для пользователя.
Наиболее близким по технической сущности и достигаемому эффекту является приемник производства ООО «СЕНСЕ-ГНБ», содержащий 3D антенну для приема сигнала от зонда, приемо-передающий узел RF, микропроцессор с микропрограммами, предназначенный для обработки поступающих сигналов от зонда. [http://sense-inc.ru/]
Недостатками данного приемника являются ограниченные функциональные возможности, а именно: функционал приемника по рабочей частоте и мощности принимаемого сигнала ограничивается параметрами, заложенными в зонде.
Технической проблемой является создание устройства системы локации, обеспечивающего удобное, информативное и эффективное его использование пользователем.
Эффективное использование подразумевает возможность настройки зонда и приемника под конкретные условия объекта (подходящая частота и необходимая мощность с учетом данных помех на объекте строительства и запланированной глубины, режим «засыпания» зонда (режим экономии аккумулятора зонда) в зависимости от типа буровой установки). Эффективное использование также подразумевает возможность универсального сопряжения зонда и приемника и упрощение взаимодействия работы приемника и зонда во время бурения, поскольку в этом случае отсутствует необходимость в дополнительной операции для вывода какой-либо требуемой информации)
Техническими результатами предлагаемого решения является улучшение эксплуатационных характеристик, а именно:
1. Обеспечение универсальности устройства в процессе работы (при неисправности приемника во время бурения есть возможность замены неисправного приемника с последующим восстановлением связи с исправным приемником для продолжения работ без потери рабочего времени и затрат на материалы, в частности на извлечение колоны и перенастройку зонда).
2. Обеспечение возможности программирования зонда (настройка необходимых пользователю параметров) до начала работы зонда. 3. Сокращение времени бурения. Указанные технические результаты достигаются тем, что в приемнике системы локации для горизонтально-направленного бурения, содержащем 3D антенну для приема сигнала от зонда, приемо-передающий узел RF, микропроцессоры с микропрограммами, экран устройства индикации для отображения информации, согласно заявленному изобретению приемник содержит дополнительную плату управления антенной и антенну для сопряжения и программирования зондом. Использование в приемнике дополнительной платы управления антенной и антенны для сопряжения и программирования зонда позволяет настраивать и программировать зонд по радиоканалу, что обеспечивает универсальность сопряжения зонда системы локации и приемника системы локации. Такое универсальное сопряжение позволяет продолжить бурение при поломке приемника, используя другой приемник, например, производства ООО «СЕНСЕ-ГНБ», что сокращает время бурения. Наличие дополнительной антенны с платой для управления зондом позволяет программировать зонд до начала работы, выставляя необходимые пользователю параметры и менять их во время бурения. Наличие микропроцессоров с микропрограммами в приемнике позволяет обрабатывать поступающие сигналы от 3D антенны, конвертировать и обрабатывать в графику и выводить на экран устройства.
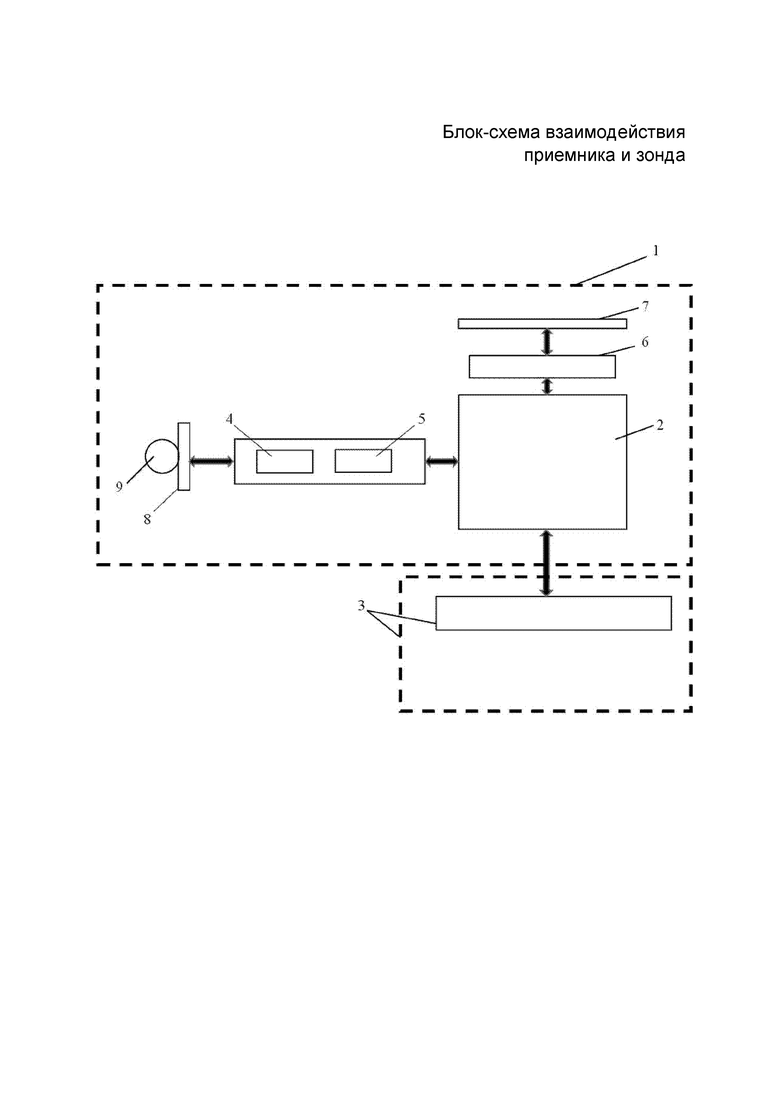
Приемник системы локации для горизонтально-направленного бурения иллюстрируется чертежом, где на фигуре представлена блок-схема взаимодействия приемника и зонда.
Приемник системы локации для горизонтально-направленного бурения 1 (фигура) содержит 3D антенну 2 для приема сигнала от зонда 3 и приемо-передающий узел RF 4 для ретрансляции сигнала на повторитель (на фиг. не показано). 3D антенна 2 связана с зондом 3 и микропроцессором 5. Микропроцессор 5, в свою очередь, связан с микропроцессором 6 и RF модулем 4. Процессор 5 с микропрограммой предназначен для расчета поступающих сигналов от зонда. Процессор 6 связан с устройством индикации 7 и предназначен для конвертации расчетных данных от процессора 5 и отображения информации на экране устройства индикации 7 приемника 1. Дополнительная плата 8 управления антенной 9 взаимосвязана с процессором 5 и предназначена для сопряжения и программирования зонда 3.
Заявленное изобретение работает следующим образом.
В меню приемника системы локации 1, например, опытный образец системы SNS производитель ООО «СЕНСЕ ГНБ» [http://sense-inc.ru/] устанавливают значение параметров и режимов работы зонда 3: уровень мощности излучения, режим «засыпания», рабочую частоту, разрешение смены частоты в процессе бурения. По команде оператора о завершении установки параметров микропроцессор 5 передает эту информацию на дополнительную плату 8 управления антенной 9, и антенну 9 для сопряжения с зондом, далее передает кодовую посылку в виде низкочастотного электромагнитного сигнала, в которой каждому из параметров отведено свое строго определенное место. В кодовую посылку автоматически добавляется информация о модели программирующего приемника. Кодовая посылка передается антенной 9, непрерывно повторяясь в виде модулированного низкочастотного электромагнитного излучения. После включения зонда (путем установки сменных элементов питания) зонд переходит на 10 секунд в режим приема и «ожидает» кодовой посылки. В случае ее отсутствия либо несоответствующего формата зонд через 10 секунд переходит в режим излучения в соответствии с ранее запрограммированными параметрами (из предыдущей настройки).
После завершения программирования зонд переходит в режим излучения. При работе 3D антенна 2 получает сигналы от зонда в виде посылок каждые 15 миллисекунд. Посылки передаются на микропроцессор 5, который производит их дешифровку и, основываясь на показаниях разности уровней сигналов по каждому параметру, вычисляет изменения параметров положения и состояния зонда (угол, температура, положение по часам, положение в горизонтальной плоскости, уровень заряда батарей). После расчета каждой посылкимикропроцессор 5 передает полученные результаты на микропроцессор 6, который преобразует эти сигналы в графические изображения и выводит их на экран индикации 7 приемника системы локации 1.
Перед началом бурения зонд 3 системы локации программируют на необходимые пользователю параметры, а именно: частоту, мощность, режим «засыпания». Зонд помещают в буровую голову, которая находится в начале буровой колонны. После начала бурения и постоянного погружения и удаления буровой головки под землю от точки забуривания пользователь может определять ее положение исключительно по данным, отображаемым на экране индикации 7 приемника системы локации.
Ориентируясь на эти данные, пользователь ведет бурение согласно проекту, двигаясь вдоль трассы бурения в радиусе приема приемником сигнала от зонда 3 и отдавая команды оператору буровой установки. Приемник системы локации (например, производства ООО «СЕНСЕ-ГНБ») позволяет пользователю постоянно видеть всю необходимую ему информацию в реальном времени и не прерывать процесс бурения. Универсальность сопряжения частей системы локации горизонтального направленного бурения позволяет не начинать процесс бурения заново в случае поломки приемника системы локации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНИК СИСТЕМЫ ЛОКАЦИИ С ОТОБРАЖЕНИЕМ В ГРАФИЧЕСКОМ ВИДЕ ИНФОРМАЦИИ НА УСТРОЙСТВЕ ИНДИКАЦИИ ПОЛОЖЕНИЯ БУРОВОГО ИНСТРУМЕНТА В РЕАЛЬНОМ ВРЕМЕНИ | 2020 |
|
RU2723927C1 |
| Программируемый универсальный зонд | 2018 |
|
RU2698373C1 |
| Удаленное устройство отображения информации приемника системы локации положения бурового инструмента r-box | 2018 |
|
RU2679468C1 |
| Система контроля профиля дна скважины на этапах расширения при строительстве коммуникаций методом горизонтально-направленного бурения | 2021 |
|
RU2771433C1 |
| Локатор для определения местоположения зонда при горизонтально направленном бурении | 2024 |
|
RU2831103C1 |
| Способ восстановительного ремонта электронного зонда буровой установки горизонтально направленного бурения и восстановленный таким способом электронный зонд | 2015 |
|
RU2617816C2 |
| СКВАЖИННОЕ УСТРОЙСТВО И СПОСОБ ЭЛЕКТРОМАГНИТНОГО ЗОНДИРОВАНИЯ В ПРОЦЕССЕ БУРЕНИЯ | 2023 |
|
RU2829287C1 |
| СИСТЕМА ДЛЯ МОНИТОРИНГА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2007 |
|
RU2337406C1 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА С ПРОЦЕССОРНЫМ ЭЛЕКТРОННЫМ КЛЮЧОМ | 2016 |
|
RU2720290C2 |
| УСТРОЙСТВО И СПОСОБ ПОСАДКИ СКВАЖИНЫ В ЦЕЛЕВОЙ ЗОНЕ | 2011 |
|
RU2571457C1 |
Данное устройство относится к системам локации для горизонтального направленного бурения (ГНБ) и применяется при выполнении работ по бестраншейной прокладке инженерных коммуникаций для определения и отслеживания местоположения зонда, установленного в буровой головке. Сущность заявленного решения заключается в том, что в приемнике системы локации для горизонтально-направленного бурения, содержащем 3D антенну для приема сигнала от зонда, приемо-передающий узел RF, микропроцессоры с микропрограммами, экран устройства индикации для отображения информации, согласно заявленному изобретению приемник содержит дополнительную плату управления антенной и антенну для сопряжения и программирования зондом. Техническим результатом при реализации заявленного решения выступает обеспечение удобного, информативного и эффективного использования пользователем приемника системы локации. 1 ил. 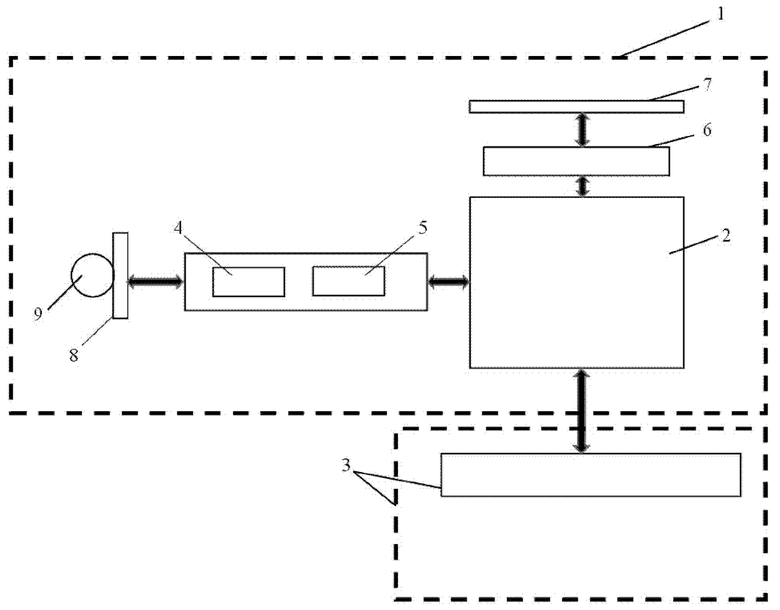
Приемник системы локации для горизонтально-направленного бурения, содержащий 3D антенну для приема сигнала от зонда, приемо-передающий узел RF, микропроцессоры с микропрограммами, экран устройства индикации для отображения информации, отличающийся тем, что приемник содержит дополнительную плату управления антенной и антенну для сопряжения и программирования зонда.
| US 5990683 A, 23.11.1999 | |||
| US 7656342 B2, 02.02.2010 | |||
| Программируемый универсальный зонд | 2018 |
|
RU2698373C1 |
| Удаленное устройство отображения информации приемника системы локации положения бурового инструмента r-box | 2018 |
|
RU2679468C1 |
| СПОСОБ УСТРАНЕНИЯ ПАРАЗИТНОГО ВЛИЯНИЯ ПРОВОДЯЩИХ БУРИЛЬНЫХ ТРУБ НА РЕЗУЛЬТАТЫ ИЗМЕРЕНИЙ ПЕРЕХОДНЫХ ЭЛЕКТРОМАГНИТНЫХ СОСТАВЛЯЮЩИХ В ПРОЦЕССЕ БУРЕНИЯ | 2005 |
|
RU2377607C2 |
| US 6777940 B2, 17.08.2004 | |||
| US 4739325 A1, 19.04.1988. | |||

