Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления системой наблюдения за дорожным движением. В частности, настоящее изобретение относится к способу определения характеристики движущегося объекта, такой как число осей транспортного средства. Кроме того, настоящее изобретение относится к блоку обработки для системы наблюдения за дорожным движением, сконфигурированному для реализации способа управления наблюдением за дорожным движением. Один примерный вариант осуществления способа может быть использован и/или установлен, например, в системе сбора платы за пользование дорогой.
Уровень техники
Системы наблюдения за дорожным движением типично конфигурируются, чтобы обнаруживать, наблюдать/отслеживать и регистрировать движущиеся объекты, такие как транспортные средства, проезжающие в зоне наблюдения. Типично, зона наблюдения определяется по предварительно определенной протяженности одной или нескольких полос движения на участке дороги. Система наблюдения за дорожным движением должна быть размещена и установлена так, что система имеет слабое или нулевое воздействие на транспортный поток, а также слабое визуальное воздействие.
Один тип системы наблюдения за дорожным движением может включать в себя две камеры, размещенные как пара на опорной раме и спозиционированные, чтобы захватывать одну полосу зоны наблюдения. Первая из двух камер направлена на первую крайнюю зону, в которой транспортные средства въезжают в зону наблюдения, а вторая из двух камер направлена на вторую крайнюю зону, в которой транспортные средства выезжают из зоны наблюдения. В качестве примера, камеры могут быть сфокусированы на предварительно определенной высоте над дорогой, соответствующей высоте номерного знака проезжающих транспортных средств. Предварительно определенная высота может быть задана на основе наиболее распространенной высоты номерных знаков на стандартном транспортном средстве. Изображения, которые захватываются камерами, типично обрабатываются в ANPR-системе (автоматическое распознавание номерного знака).
Известные до настоящего времени системы наблюдения за дорожным движением типично используются, чтобы обнаруживать движущиеся с превышением скорости транспортные средства, небезопасное вождение и места аварий без использования человека, чтобы активно наблюдать за дорожным движением, чтобы идентифицировать этот тип мест происшествия. В автоматизированной системе оператору-человеку требуется лишь подтверждать нарушение правил движения на последующей стадии просмотра. В некоторых случаях даже возможно, что административный штраф или судебное требование могут быть запротоколированы и отправлены по назначению без подтверждения оператором. В другой связанной деятельности система может быть сконфигурирована, чтобы собирать статистику по дороге, чтобы идентифицировать, должны ли изменения на дороге быть учтены и реализованы для того, чтобы улучшать безопасность общего функционирования дороги.
Система наблюдения за дорожным движением особенно полезна для установки в системе сбора платы за пользование дорогой, с тем, чтобы обнаруживать и регистрировать транспортные средства, движущиеся по дороге, которые предназначена для денежных сборов, иногда в виде налога. Одна широко используемая система сбора платы за пользование дорогой содержит опорную раму с несколькими устройствами, приемопередатчиком и множеством датчиков. Приемопередатчик может быть использован для автоматической регистрации проезжающих транспортных средств, оборудованных транспондерами. С транспортных средств с транспондерами, таким образом, автоматически взимается плата каждый раз, когда они проезжают станцию сбора платы за пользование дорогой. Датчики, такие как камеры, используются, чтобы захватывать изображения номерных знаков проезжающих транспортных средств без транспондеров. В зависимости от конфигурации системы изображения могут быть использованы, чтобы выполнять сбор платы на основе государственного регистрационного номера или служить в качестве свидетельства неисполнения в случае, когда требуются транспондеры. Системы сбора платы за пользование дорогами могут также быть сконфигурированы, чтобы классифицировать транспортные средства на основе физических характеристик, таких как размер или объем транспортного средства.
Несмотря на активность в этой области, остается неустраненная необходимость для улучшения функционирования и использования системы наблюдения за дорожным движением. В частности, представляется желательным увеличивать возможности для пользователей системы, таких как пользователи системы сбора платы за пользование дорогой, выполнять более точные классификации транспортных средств, проезжающих через систему наблюдения.
Сущность изобретения
Чтобы успешно выполнять более точное или надежное наблюдение, некоторые системы дорожного движения применяют различные технологии, чтобы улучшать точность системы. Одной такой технологией является использование стереоскопических камер или датчиков. Стереоскопический датчик содержит первую и вторую камеры, расположенные с интервалом. Обе камеры направлены так, что они захватывают область, покрывающую, по существу, один и тот же сегмент области, т.е. наблюдаемый посредством стереоскопического датчика сегмент области. Камеры стереоскопического датчика калибруются так, что они имеют плоскость наблюдения, которая совмещается с наблюдаемым сегментом области, в результате чего, плоскость наблюдения указывает нулевую плоскость, и высота/глубина измеряются с плоскостью наблюдения в качестве нулевой плоскости. Стереоскопический датчик использует две камеры, чтобы захватывать изображения наблюдаемого сегмента области. Движущийся объект, который находится в плоскости наблюдения, такой как тень на дороге, будет иметь одинаковую позицию в изображении с первой камеры и изображении со второй камеры. Движущийся объект, который находится ниже или выше плоскости наблюдения (такой как точка транспортного средства на дороге), будет иметь слегка отличающуюся позицию в изображении с первой камеры, чем в изображении со второй камеры стереоскопического датчика. Это различие возникает вследствие различных углов, которые камеры имеют относительно движущегося объекта. С помощью этой технологии изображение/карта высоты/глубины (в дальнейшем называемая только изображением высоты) может быть создана для наблюдаемого сегмента области.
Стереоскопические датчики и системы со стереоскопическими системами используются, чтобы наблюдать за дорожным движением, особенно в критических ситуациях, таких как стойка сбора дорожной пошлины или пункт сбора дорожной пошлины. Стереоскопические датчики и системы с ними могут быть применены в других прикладных задачах, таких как наблюдение за торговыми центрами, площадками для парковки, аэродромами и любыми другими местами, где изображение высоты наблюдаемой области является полезным. Стереоскопические датчики могут захватывать единичные изображения или использоваться для захвата видеорядов. Информация в изображении высоты может быть использована для классификации объектов, таких как, например, транспортные средства, самолеты, люди и шины в зависимости от предпочтительного применения.
Целью примерных вариантов осуществления изобретения является предоставление способа управления системой наблюдения за дорожным движением, который предоставляет возможность простого, но все же надежного и точного, определения характеристики, относящейся к транспортному средству. Эта и другие цели, которые станут очевидны в последующем, достигаются посредством способа управления системой наблюдения за дорожным движением, как определено в сопровождающем независимом пункте формулы изобретения. Подробности некоторых примерных вариантов осуществления и необязательные признаки перечисляются в ассоциированных зависимых пунктах формулы.
Согласно первому аспекту предоставляется способ управления системой наблюдения за дорожным движением. Система содержит множество стереоскопических датчиков, соединенных с блоком обработки. Каждый стереоскопический датчик из множества стереоскопических датчиков конфигурируется для захвата первого изображения и второго изображения, которые могут быть обработаны в изображение высоты посредством блока обработки. Кроме того, каждый стереоскопический датчик из множества стереоскопических датчиков конфигурируется, чтобы определять и наблюдать за основной зоной наблюдения, определяющей зону основного охвата в плоскости наблюдения на предварительно определенном расстоянии от стереоскопического датчика. По существу, любое изображение из захваченного первого изображения, захваченного второго изображения и обработанного изображения высоты включает в себя первичную область обзора, соответствующую зоне основного охвата стереоскопического датчика. Способ содержит этапы:
- захвата первых изображений и вторых изображений с течением времени посредством множества стереоскопических датчиков;
- обработки первого изображения и второго изображения от первого стереоскопического датчика из множества стереоскопических датчиков, чтобы создавать первое изображение высоты из них посредством блока обработки;
- анализа упомянутого первого изображения высоты, чтобы обнаруживать движущийся объект, такой как транспортное средство, находящееся в первичной области обзора первого стереоскопического датчика; и
- анализа части первичной области обзора, по меньшей мере, любого изображения из первого изображения, второго изображения и комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика, на основе обнаруженного движущегося объекта в упомянутом первом изображении высоты, чтобы определять характеристику движущегося объекта.
Таким образом, стереоскопические датчики системы наблюдения, используемые в способе, управляются, чтобы взаимодействовать друг с другом для того, чтобы обнаруживать движущийся объект, такой как транспортное средство, посредством одного датчика и на основе данных, относящихся к этой операции, т.е. к обнаруженному транспортному средству, идентифицировать наиболее оптимальное изображение среди захваченных изображений других датчиков системы с тем, чтобы определять характеристику транспортного средства достоверным и точным образом, как дополнительно описывается далее в данном документе.
Как упомянуто в данном документе, движущийся объект, как правило, ссылается на транспортное средство, такое как грузовой автомобиль, автобус или т.п.
Функционирование и примерные преимущества примерных вариантов осуществления изобретения надлежащим образом изображаются посредством неограничивающего примера, когда способ используется для определения числа осей транспортного средства. Определение числа осей транспортного средства более точным образом, в частности, уместно для многих операторов по сбору оплаты за пользование дорогой, имеющих желание взимать оплату в соответствии с классификацией от числа осей транспортного средства. В настоящее время, это обычно выполняется посредством отдельной системы подсчета осей, которая может быть дорогостоящей, неточной и сложной для объединения с другими частями и/или операциями системы сбора платы. Кроме того, установка отдельной системы подсчета осей может часто требовать значительных вторгающихся в дорогу установок, которые может быть затруднительно ремонтировать. Однако, конфигурация примерного варианта осуществления способа, как упомянуто выше, использует систему стереоскопических датчиков, чтобы первоначально обрабатывать первое изображение и второе изображение от первого стереоскопического датчика, чтобы создавать первое изображение высоты, и после этого выполнять анализ изображения высоты, чтобы обнаруживать транспортное средство, находящееся в первичной области обзора. Когда транспортное средство было обнаружено и/или идентифицировано посредством первого стереоскопического датчика, система способна определять точное местоположение транспортного средства в зоне наблюдения (типично соответствующей наблюдаемому участку дороги), через анализ изображения высоты. После этого, на основе данных, относящихся к обнаруженному транспортному средству в первом изображении высоты, способ продолжает инициировать анализ части первичной области обзора первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика, чтобы определять число осей транспортного средства. Таким образом, способ может выполнять анализ характеристик транспортного средства, например, числа осей, из изображения, которое захватило наиболее оптимальный вид осей транспортного средства, т.е., наиболее оптимальный вид интересующей области характеристики транспортного средства, с тем, чтобы добиваться более точных измерений характеристики. Обнаружение оси может быть выполнено однократно для каждого транспортного средства, когда все транспортное средство видимо в одно и то же время в оптимальной позиции. Альтернативно, обнаружение оси может выполняться непрерывно в течение всего проезда, охватываемого зоной наблюдения датчиков. Таким образом, способ конфигурируется, чтобы предоставлять взвешенные средние обнаружения осей. Кроме того, этот тип конфигурации может предоставлять возможность того, чтобы оси на длинных грузовых автомобилях и прицепах могли быть обнаружены по частям.
Соответственно, посредством конфигурации способа, как упомянуто выше, становится возможным предоставлять способ управления системой наблюдения дорожного движения для определения характеристики транспортного средства более надежным и менее дорогостоящим образом по сравнению с известными до настоящего времени способами.
В одном примерном варианте осуществления способ особенно полезен для определения числа осей транспортного средства.
Таким образом, настоящее изобретение также относится к способу определения характеристики движущегося объекта, такой как число осей транспортного средства.
Типично, хотя строго не требуется, способ может быть сконфигурирован, чтобы инициировать анализ части первичной области обзора, по меньшей мере, первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством другого стереоскопического датчика, прежде чем упомянутые изображения преобразуются в изображение высоты. Таким образом, становится возможным получать более точную информацию о некоторой характеристике транспортного средства, как дополнительно описывается далее в данном документе. Должно, однако, быть без труда понятно, что первое изображение, второе изображение и/или комбинация первого и второго изображений могут быть сохранены системой для последующего анализа.
Как будет дополнительно описано относительно примерных вариантов осуществления в данном документе, существует несколько различных возможностей выполнять анализ первого изображения и/или второго изображения.
Предусматривая, что способ включает в себя этап захвата изображений посредством множества стереоскопических датчиков, способ конфигурируется, чтобы воспользоваться преимуществом более широкой области обзора стереоскопического датчика в том смысле, что обнаруженное транспортное средство, движущееся, например, по дороге, охватывается как зоной основного охвата первого стереоскопического датчика, так и зоной второстепенного охвата, типично внешней областью (иногда обозначаемой боковой областью обзора) второго стереоскопического датчика. Другими словами, в случае участка дороги, система выполняется с возможностью определять и отслеживать зону наблюдения, так что стереоскопический датчик способен отслеживать предварительно определенный участок дороги в зоне наблюдения через зону основного охвата (или первичную область обзора) и область соседнего участка дороги в зоне наблюдения через боковую зону охвата зоны основного охвата (боковая область обзора первичной области обзора). Таким образом, благодаря характеристике стереоскопического датчика, каждый стереоскопический датчик может быть сконфигурирован посредством способа, чтобы отслеживать предварительно определенный участок дороги и область соседнего участка дороги.
Помимо того, что характеристика может ссылаться на число осей транспортного средства, характеристика может ссылаться на любое одно из следующего: наличие окон, дорожный просвет, угол переднего окна и указание объектов, присоединенных к верху или позади транспортного средства (например, велосипедов).
Предусматривая анализ первого изображения высоты, чтобы обнаруживать движущийся объект, такой как транспортное средство, находящееся в первичной области обзора, становится возможным определять точное местоположение транспортного средства в плоскости наблюдения, типично соответствующей предварительно определенному участку дороги.
В качестве примера, этап анализа первого изображения высоты, чтобы обнаруживать движущийся объект, такой как транспортное средство, находящееся в первичной области обзора, включает в себя этап определения позиции транспортного средства по координатам в трехмерной декартовой системе координат. В качестве примера, транспортное средство обнаруживается посредством анализа изображения высоты на предмет групп пикселов высоты. Типично, рамка отслеживания определяется вокруг группы, которая будет следовать за пикселами высоты, когда они перемещаются. Из этой рамки отслеживания становится возможным получать позицию, скорость, длину, высоту и ширину транспортного средства, которые должны быть использованы в вычислении другого датчика, который предоставляет лучший вид сбоку транспортного средства.
Согласно одному примерному варианту осуществления способ конфигурируется для обнаружения числа осей транспортного средства. Таким образом, способ содержит этап анализа части первичной области обзора первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика на основе обнаруженного движущегося объекта в упомянутом первом изображении высоты, чтобы определять число осей движущегося объекта.
Согласно одному примерному варианту осуществления, способ может дополнительно содержать этап обработки первого изображения и второго изображения, по меньшей мере, от второго стереоскопического датчика, чтобы создавать второе изображение высоты из них посредством блока обработки.
Типично, зона основного охвата в плоскости наблюдения, по меньшей мере, первого стереоскопического датчика перекрывает зону основного охвата в плоскости наблюдения второго стереоскопического датчика.
В целом, зона наблюдения может быть определена как зона охвата системы наблюдения за дорожным движением в плоскости, из которой выступает несущая структура, такая как опорная рама. Другими словами, зона наблюдения в данном документе ссылается на область на плоскости наблюдения, которую охватывает система наблюдения за дорожным движением, т.е., захватываемую область множества стереоскопических датчиков системы наблюдения за дорожным движением.
В реализации системы наблюдения за дорожным движением область наблюдения адаптируется, чтобы соответствовать области дорожного движения, в которой желательно наблюдение и/или регистрация транспортных средств. Таким образом, зона наблюдения может типично включать в себя поверхность дороги, предварительно определенный участок дороги и/или соседние участки дороги или т.п. Должно быть без труда понятно, что в реализации системы наблюдения за дорожным движением плоскость наблюдения размещается параллельно с плоскостью поверхности дороги, предварительно определенным участком дороги и/или соседним участком дороги и т.д., который должен наблюдаться. Предварительно определенный участок дороги может типично перекрываться с соседним участком дороги, или, по меньшей мере, размещаться погранично друг к другу, так что транспортное средство, проезжающее несколько участков дороги, через границы, может непрерывно наблюдаться посредством системы.
В примере, когда система и способ используются, чтобы наблюдать за транспортным потоком, движущимся по одной или нескольким полосам движения, зона наблюдения одного стереоскопического датчика может типично охватывать предварительно определенный участок дороги, включающий в себя первую полосу движения и вторую полосу движения.
Как упомянуто выше, представляется несколько различных возможностей выполнять анализ первого изображения и/или второго изображения, захваченных посредством второго стереоскопического датчика.
Согласно одному примерному варианту осуществления, этап определения характеристики движущегося объекта основывается на образце, соответствующем одной или нескольким моделям движущегося объекта. Следовательно, этап анализа части первичной области обзора первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика, содержит этап определения характеристики движущегося объекта посредством образца, соответствующего одной или нескольким статистическим моделям движущегося объекта. Типично, одна или несколько статистических моделей движущегося объекта могут быть сохранены в памяти в системе, например, в блоке обработки.
С помощью статистической модели, включающей в себя, в качестве примера, размеры транспортного средства и другие признаки, область для анализа сохраняется меньшей. Таким образом, процесс анализа может быть сохранен более коротким, типично приводящим в результате к более достоверным результатам.
Типично, статистическая модель(и) основывается на стандартных уровнях высоты, стандартных уровнях длины, стандартных уровнях ширины, размере кабины, информации характерных особенностей конструкции, информации номерного знака, информации о погодных условиях и т.п.
Согласно одному примерному варианту осуществления, характеристика движущегося объекта определяется посредством определения нескольких значений расхождения высоты движущегося объекта, где группы значений расхождения ниже первого порогового значения указывают присутствие оси. В одном примерном варианте осуществления указание оси может быть обнаружено посредством указания присутствия колеса.
Другими словами, способ включает в себя этап определения нескольких значений расхождения высоты движущегося объекта, где группы значений расхождения ниже первого порогового значения указывают присутствие оси.
Кроме того, если группа включает в себя значения ниже второго порогового значения, способ конфигурируется, чтобы указывать, что колесо движущегося объекта находится в соприкосновении с землей.
Типично, несколько значений расхождения высоты движущегося объекта определяются из первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика перед созданием его второго изображения высоты. Значения расхождения вычисляются из различий в позициях контрастов в первом и втором изображении. Значение расхождения равно значению высоты, но оно все еще не было перемещено в корректную позицию в позиции высоты, например, столб, видимый слегка сбоку, будет иметь несколько значений расхождения, но в изображении высоты значения расхождения, они все будут преобразованы в одну позицию с единственным наибольшим видимым значением расхождения/высоты. Это означает, что, например, борт прицепа будет иметь множество значений расхождения, включающих в себя значения расхождения для колес, в то время как в изображении высоты они все будут охвачены высотой от крыши.
Согласно одному примерному варианту осуществления, мера, чтобы определять характеристику движущегося объекта, может ссылаться на определение позиции шины транспортного средства, соответствующей оси транспортного средства для транспортного средства, когда рассматривается в трехмерной декартовой системе координат.
В одной конфигурации способа система и способ могут быть выполнены с возможностью наблюдать за полосой движения и, по меньшей мере, одной соседней полосой движения. Другими словами, каждый стереоскопический датчик из множества стереоскопических датчиков выполнен с возможностью наблюдать за полосой движения и частью соседней полосы. Для этого система конфигурируется, чтобы наблюдать за множеством полос движения.
Типично, по меньшей мере, часть зоны основного охвата каждого стереоскопического датчика из множества стереоскопических датчиков направляется на прогнозируемую область оси транспортного средства для транспортного средства.
Согласно одному примерному варианту осуществления способ дополнительно содержит этап предварительного определения того, превышает ли транспортное средство предварительно определенное значение активации, такое как минимальное значение высоты, минимальное значение длины или минимальное число осей транспортного средства.
Согласно одному примерному варианту осуществления, этап анализа части первичной области обзора первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика (на основе обнаруженного движущегося объекта в первом изображении высоты, чтобы определять характеристику движущегося объекта), активируется, когда транспортное средство превышает предварительно определенное значение активации.
Типично, хотя строго не требуется, множество стереоскопических датчиков устанавливаются на опорной раме и конфигурируются, чтобы определять плоскость наблюдения на поверхности дороги под опорной рамой.
Должно быть отмечено, что выражение "комбинация первого и второго изображений" может ссылаться на изображение расхождения. Как хорошо известно в области стереоизображений, расхождение ссылается на расстояние между двумя соответствующими точками в левом изображении и правом изображении стереопары. Таким образом, как упомянуто выше, значения расхождения вычисляются из различий в позициях контрастов в первом (левом) и втором (правом) изображении. Значение расхождения равно значению высоты, но оно все еще не было перемещено в корректную позицию в позиции высоты.
Следует отметить, что зона основного охвата может дополнительно быть определена посредством наличия зоны второстепенного охвата, типично, соответствующей внешней области для зоны основного охвата. Таким образом, любое изображение из захваченного первого изображения, захваченного второго изображения и обработанного изображения высоты включает в себя вторичную область обзора, соответствующую зоне второстепенного охвата.
По существу, зона наблюдения может быть определена так, что первая камера и вторая камера, по существу, наблюдают за предварительно определенным участком дороги в зоне наблюдения через зону основного охвата и областью соседнего участка дороги в зоне наблюдения через зону второстепенного охвата. Таким образом, каждый стереоскопический датчик конфигурируется, чтобы наблюдать за предварительно определенным участком дороги и областью соседнего участка дороги.
В ситуации дорожного движения, когда соответствующее транспортное средство загораживается другим транспортным средством, так что характеристика транспортного средства не видна в изображении, захваченном посредством стереоскопического датчика (например, второго датчика), способ может находить наиболее оптимальное захваченное изображение для анализа благодаря тому, что первый стереоскопический датчик способен определять точную позицию транспортного средства, как видно в трехмерной декартовой системе координат. По существу, способ может, через этап создания первого изображения высоты из изображений первого стереоскопического датчика и этап анализа первого изображения высоты, обнаруживать транспортное средство, находящееся в пределах первичной области обзора, идентифицировать то, загораживается ли транспортное средство другим транспортным средством или объектом, и определять, препятствует ли загораживающее транспортное средство точному определению характеристики транспортного средства, с тем, чтобы оценивать и решать, какое изображение из доступных изображений должно быть проанализировано, на основе обнаруженного транспортного средства в первом изображении высоты от первого датчика.
Типично, блок обработки может ссылаться на схему обработки, блок управления или т.п. и/или может включать в себя микропроцессор, микроконтроллер, программируемый процессор цифровых сигналов или другое программируемое устройство. Блок обработки может также, или вместо этого, включать в себя специализированную интегральную схему, программируемую вентильную матрицу или программируемую матричную логику, программируемое логическое устройство или процессор цифровых сигналов. Когда блок обработки включает в себя программируемое устройство, такое как микропроцессор, микроконтроллер или программируемый процессор цифровых сигналов, упомянутые выше, процессор может дополнительно включать в себя исполняемый компьютером код, который управляет работой программируемого устройства.
Типично, блок обработки конфигурируется, чтобы принимать первые изображения и вторые изображения от множества стереоскопических датчиков, и дополнительно конфигурируется, чтобы обрабатывать упомянутые изображения в изображение высоты.
В целом, блок обработки конфигурируется, чтобы управлять системой, как упомянуто выше, т.е. выполнять этапы способа для способа, который упомянут выше.
Типично, хотя строго не требуется, блок обработки может также быть сконфигурирован, чтобы выполнять сопоставление образца с одной или несколькими статистическими моделями движущегося объекта, с тем, чтобы определять характеристику движущегося объекта (транспортного средства).
Должно быть отмечено, что каждый стереоскопический датчик из множества стереоскопических датчиков иногда может называться или обозначаться как стереоскопическая камера.
Кроме того, каждый стереоскопический датчик может, как правило, содержать первую камеру, приспособленную захватывать первое изображение, и вторую камеру, приспособленную захватывать второе изображение.
По существу, первый стереоскопический датчик снабжается первой камерой, приспособленной захватывать первое изображение, и второй камерой, приспособленной захватывать второе изображение. Кроме того, первый стереоскопический датчик конфигурируется, чтобы быть направленным на дорогу так, что и первая камера, и вторая камера, по существу, наблюдают за первым предварительно определенным участком дороги через зону основного охвата, так что первый датчик наблюдает за первым предварительно определенным участком дороги.
Аналогично, второй стереоскопический датчик снабжается первой камерой, приспособленной захватывать первое изображение, и второй камерой, приспособленной захватывать второе изображение. Кроме того, второй стереоскопический датчик конфигурируется, чтобы быть направленным на дорогу так, что и первая камера, и вторая камера, по существу, наблюдают за вторым предварительно определенным участком дороги через зону основного охвата, так что второй датчик наблюдает за вторым предварительно определенным участком дороги.
Согласно второму аспекту, цель достигается посредством блока обработки согласно независимому пункту 15 формулы. Таким образом, согласно второму аспекту, предоставляется блок обработки для системы наблюдения за дорожным движением, который конфигурируется для реализации способа согласно первому аспекту и/или любому из примерных вариантов осуществления, которые упомянуты выше. Дополнительные результаты этого второго аспекта в значительной степени аналогичны результатам, описанным выше относительно первого аспекта.
Выражение "изображение высоты", в целом, ссылается на изображение, в котором каждый пиксел имеет ассоциированное значение высоты. Изображение высоты является, например, изображением, раскрывающим высоты над дорогой для участка дороги, охватываемого стереоскопической камерой. В этом типе применения значение высоты равно нулю для уровня земли, т.е., уровня дороги. Однако, в некоторых случаях, значение высоты устанавливается в ноль также для неопределенных значений, относящихся к неотчетливым пикселам. Таким образом, в некоторых примерах, процесс идентификации высот в изображении высоты может включать в себя этап ассоциирования неотчетливых пикселов со значением высоты, равным нулю.
Изображение высоты создается посредством объединения информации из первого изображения, захваченного первой камерой стереоскопической камеры, и второго изображения, захваченного второй камерой стереоскопической камеры.
Другими словами, в контексте изобретения, "изображение высоты" - это изображение, содержащее информацию из первого и второго изображений, и в котором каждый пиксел в изображении высоты имеет ассоциированное значение высоты. Атрибут высоты указывает высоту изображения, в пикселах.
Кроме того, изображение высоты от одной стереоскопической камеры может быть совмещено, или объединено, с изображением высоты от другой стереоскопической камеры, чтобы формировать объединенное изображение высоты, так как координаты изображения высоты совмещаются и, таким образом, типично синхронизируются друг с другом. Таким образом, одно изображение высоты от одной стереоскопической камеры и другое изображение высоты от другой стереоскопической камеры могут формировать объединенное изображение высоты.
Типично, хотя строго необязательно, вычисления высоты проводятся из информации в объединенном изображении высоты.
Процесс вычисления высот из первого и второго изображения является общеизвестным способом и, таким образом, дополнительно не описывается в данном документе.
Дополнительные признаки и преимущества примерных вариантов осуществления настоящего изобретения станут очевидны при изучении прилагаемой формулы изобретения и последующего описания. Специалисты в данной области техники поймут, что различные признаки настоящего изобретения могут быть объединены, чтобы создавать варианты осуществления, отличные от описанных в последующем, без отступления от рамок настоящего изобретения.
Краткое описание чертежей
Различные примерные варианты осуществления, включающие в себя свои конкретные признаки и примерные преимущества, будут без труда поняты из последующего иллюстративного и неограничивающего подробного описания и сопровождающих чертежей, на которых:
Фиг. 1a схематично иллюстрирует систему наблюдения за дорожным движением, управляемую способом согласно примерному варианту осуществления настоящего изобретения;
Фиг. 1b - это схематичный вид сверху системы на фиг. 1a;
Фиг. 1c схематично иллюстрирует примерный вариант осуществления стереоскопической пары камер стереоскопического датчика;
Фиг. 2 схематично иллюстрирует систему наблюдения за дорожным движением на фиг. 1a, в которой иллюстрируются дополнительные детали системы;
Фиг. 3 иллюстрирует изображение от стереоскопического датчика согласно примерному варианту осуществления настоящего изобретения;
Фиг. 4 схематично иллюстрирует систему наблюдения за дорожным движением, управляемую способом согласно примерному варианту осуществления настоящего изобретения, в котором система снабжается множеством стереоскопических датчиков;
Фиг. 5a - это графическое представление способа для управления системой наблюдения за дорожным движением согласно примерному варианту осуществления настоящего изобретения;
Фиг. 5b - это графическое представление способа для управления системой наблюдения за дорожным движением согласно примерному варианту осуществления настоящего изобретения;
Фиг. 6 - это вид сбоку транспортного средства, иллюстрирующий дополнительные детали относительно некоторой характеристики транспортного средства, которая способна определяться способом согласно примерному варианту осуществления настоящего изобретения.
Подробное описание изобретения
Примерные варианты осуществления настоящего изобретения будут теперь описаны более полно далее в данном документе со ссылкой на сопровождающие чертежи. Изобретение может, однако, быть осуществлено во многих различных формах и не должно истолковываться как ограниченное вариантами осуществления, изложенными в данном документе; скорее, эти варианты осуществления предоставляются для полноты и завершенности. Аналогичные ссылочные номера ссылаются на аналогичные элементы по всему описанию. Чертежи необязательно существуют в масштабе, и некоторые детали могут быть преувеличены для того, чтобы лучше иллюстрировать и объяснять примерные варианты осуществления настоящего изобретения.
Обращаясь теперь к чертежам и фиг. 1c в частности, изображается примерный вариант осуществления стереоскопической пары 10, 11 камер, причем эта пара 10, 11 камер стереоскопического датчика приспосабливается, чтобы определять зону 50 наблюдения в плоскости 60 наблюдения. Стереоскопическая пара 10, 11 камер содержит первую и вторую камеру 10, 11, которые приспособлены захватывать изображения плоскости 60 наблюдения. Плоскость 60 наблюдения протягивается в X- и Y- направлении, и стереоскопическая пара 10, 11 камер предусматривается с расстоянием до плоскости 60 наблюдения в Z-направлении на чертеже, таким образом, X- Y- и Z-направления ортогональны друг другу. Стереоскопическая пара 10, 11 камер имеет проецируемую позицию 92 установки в плоскости 60 наблюдения. Размещение стереоскопической пары 10, 11 камер на фиг. 1c может рассматриваться как стандартная установка стереоскопической пары 10, 11 камер.
Камеры 10, 11 калибруются так, что они определяют плоскость 60 наблюдения, в результате чего, плоскость 60 наблюдения указывает нулевую плоскость, и высота/глубина измеряются с помощью плоскости 60 наблюдения в качестве нулевой плоскости. Первая камера и вторая камера 10, 11 захватывают свои изображения одновременно. Какой-либо объект, который находится в плоскости 60 наблюдения, такой как тень на дороге, будет иметь одинаковую позицию в изображении с первой камеры 10 и изображении со второй камеры 11. Какой-либо объект или часть объекта, которая находится ниже или выше плоскости 60 наблюдения (такая как часть транспортного средства на дороге), будет иметь слегка отличающуюся позицию в изображении с первой камеры 10, чем в изображении со второй камеры 11 стереоскопического датчика. Это различие существует вследствие различных углов, которые камеры 10, 11 имеют относительно плоскости 60 поверхности и объекта.
Обращаясь теперь к другим чертежам и фиг. 1a в частности, изображается система наблюдения за дорожным движением, содержащая множество стереоскопических датчиков, соединенных с блоком обработки, которая может управляться способом согласно примерному варианту осуществления настоящего изобретения. Ради простоты система наблюдения за дорожным движением может иногда обозначаться как система наблюдения или просто как система. Местоположения компонентов в системе и местоположения других признаков, компонентов или секций, используемых, чтобы описывать реализацию изобретения, могут в данном документе быть объяснены и иллюстрированы относительно продольного направления X, поперечного направления Y и вертикального направления Z.
Система 200 в этом примерном варианте осуществления выполнена с возможностью наблюдать за зоной 150 наблюдения в форме поверхности 191 дороги. Как иллюстрировано, система здесь выполнена с возможностью наблюдать за полосой 196 движения и, по меньшей мере, одной соседней полосой 198 движения.
На поверхности дороги, иногда также обозначаемой как участок дороги, типично существует несколько движущихся объектов, таких как одно или несколько транспортных средств 140, 141. Система, в частности, применима для наблюдения за тяжелыми дорожными транспортными средствами, такими как тяжелые грузовые автомобили или автобусы. Однако, может быть без труда понятно, что другие движущиеся объекты и/или транспортные средства могут наблюдаться. Другими словами, система 200 наблюдения за дорожным движением конфигурируется, чтобы наблюдать, отслеживать и регистрировать транспортные средства, проезжающие через основную зону 150 наблюдения.
Как упомянуто выше, система 200 содержит множество стереоскопических датчиков 100a, 100b, соединенных с блоком 210 обработки, как показано на фиг. 1b. Каждый стереоскопический датчик 100a-100n из множества стереоскопических датчиков конфигурируется для захвата первого изображения и второго изображения, способных быть обработанными в изображение высоты посредством блока обработки. Кроме того, каждый стереоскопический датчик из множества стереоскопических датчиков конфигурируется, чтобы определять и наблюдать за основной зоной 150 наблюдения, определяющей зону 155 основного охвата в плоскости 160 наблюдения на предварительно определенном расстоянии D от стереоскопических датчиков 100a или 100b. По существу, любое изображение из захваченного первого изображения, захваченного второго изображения и обработанного изображения высоты включает в себя первичную область обзора, соответствующую зоне основного охвата стереоскопического датчика.
Плоскость 160 наблюдения здесь соответствует плоскости 60 наблюдения, раскрытой на фиг. 1c. Каждый стереоскопический датчик 100a, 100b содержит пару 110 камер. Каждая пара 110 камер здесь соответствует паре 10, 11 камер, раскрытой на фиг. 1c. Каждая пара 110 камер определяет основную зону наблюдения (например, 151, 152) в плоскости 160 наблюдения.
Плоскость 160 наблюдения протягивается в плоскости, определенной продольным направлением X и поперечным направлением Y. Кроме того, каждый стереоскопический датчик типично находится на предварительно определенном расстоянии D над плоскостью 160 наблюдения, как видно в вертикальном направлении Z.
Таким образом, плоскость 160 наблюдения действует как плоскость отсчета при объединении изображений, захваченных посредством пары камер стереоскопического датчика, чтобы создавать изображения высоты. В качестве примера, точка, определенная как находящаяся в плоскости 160 наблюдения, имеет высоту, равную 0, точка над плоскостью имеет положительную высоту, равную различию в высоте между точкой и плоскостью 160, и отрицательную высоту, если ниже плоскости 160. Когда стереоскопический датчик 100 выполнен с возможностью наблюдать за участком дороги, плоскость 160 наблюдения размещается вдоль поверхности 191 дороги, в результате чего, высота над плоскостью 160 наблюдения равна высоте над поверхностью 191 дороги.
Типично, стереоскопический датчик является стереоскопической камерой, как известно в области техники. Таким образом, в примерном варианте осуществления, описанном относительно фиг. 1a и 1b, и во всех других примерных вариантах осуществления, каждый стереоскопический датчик, как правило, содержит первую камеру, приспособленную захватывать первое изображение, и вторую камеру, приспособленную захватывать второе изображение. Другими словами, каждый стереоскопический датчик, как правило, содержит пару камер для захвата первого изображения и второго изображения, которые могут быть обработаны в изображение высоты. Для этого первый датчик 100a наблюдения имеет первую пару 110 камер для захвата первого изображения и второго изображения, которые могут быть обработаны в первое изображение высоты. Таким образом, первая пара 110 камер приспособлена быть направленной, чтобы охватывать практически одну и ту же область зоны наблюдения, так что первое изображение высоты становится "нулевой плоскостью" на предварительно определенном расстоянии от первого стереоскопического датчика 100a.
Аналогично, второй датчик 100b наблюдения имеет вторую пару 120 камер для захвата первого изображения и второго изображения, которые могут быть обработаны во второе изображение высоты. Таким образом, вторая пара 120 камер приспособлена быть направленной, чтобы охватывать практически одну и ту же область зоны наблюдения, так что второе изображение высоты становится "нулевой плоскостью" на предварительно определенном расстоянии от первого стереоскопического датчика 100b.
Другими словами, когда зона наблюдения является предварительно определенным участком дороги, первая камера и вторая камера в стереоскопическом датчике практически направлены на один и тот же предварительно определенный участок дороги, так что создаются два отдельных изображения, полученные в одно и то же время. Таким образом, изображение высоты предварительно определенного участка дороги может быть создано посредством выполнения обработки изображения по первому изображению и второму изображению, которая типично выполняется посредством блока обработки, как дополнительно описывается далее в данном документе. В целом, плоскость дороги размещается практически в одинаковой позиции в первом изображении и втором изображении. Хотя не показано, стереоскопический датчик, например, 100a или 100b, типично размещается в наклоненной под углом конфигурации, чтобы захватывать предварительно определенный участок дороги, с областью обзора датчика, протягивающейся от горизонта до окрестностей датчика. Посредством этой конфигурации датчика становится возможным использовать стереоскопический датчик для наблюдения за характером дорожного движения на длинном участке дороги, предоставляя возможность анализа сложных ситуаций дорожного движения, которые могут иметь место на протяжении более длинных дистанций или в течение продолжительного времени.
Стереоскопический датчик может также быть направлен на дорогу, так что предварительно определенный участок дороги простирается от одной части горизонта до другой части горизонта, например, с помощью широкоугольной линзы.
Зона 150 наблюдения предусматривается в плоскости 160 над множеством стереоскопических датчиков, и типично от которой протягивается опорная рама 190, как показано на фиг. 1a или 1b. Соответственно, зона 150 наблюдения размещается на уровне земли, соответствующем плоскости поверхности 191 дороги, находящейся под наблюдением посредством системы 200. Зона наблюдения может, таким образом, быть определена как зона охвата системы наблюдения за дорожным движением в плоскости, из которой выступает несущая структура, такая как опорная рама. Другими словами, зона наблюдения в данном документе ссылается на область на плоскости наблюдения, которую охватывает система наблюдения за дорожным движением, т.е. область захвата множества стереоскопических датчиков системы наблюдения за дорожным движением. Таким образом, зона наблюдения может типично включать в себя поверхность дороги, предварительно определенный участок дороги и/или соседние участки дороги или т.п.
Должно быть без труда понятно, что в реализации системы наблюдения за дорожным движением плоскость наблюдения размещается параллельно с плоскостью поверхности дороги, предварительно определенным участком дороги и/или соседним участком дороги и т.д., который должен наблюдаться. Предварительно определенный участок дороги может типично перекрываться с соседним участком дороги, или, по меньшей мере, размещаться погранично друг к другу, так что транспортное средство, проезжающее несколько участков дороги, через границы, может непрерывно наблюдаться посредством системы.
Как иллюстрировано на чертежах, с особой ссылкой на фиг. 1a и 1b, зона 150 наблюдения начерчена на (определена на) предварительно определенном участке R1 дороги, таком как множество полос 196, 198 движения. По существу, основная зона наблюдения может соответствовать первой полосе движения и части соседней полосы движения. Для этого система здесь выполнена с возможностью наблюдать за полосой 196 движения и, по меньшей мере, одной соседней полосой 198 движения, хотя система может типично наблюдать за несколькими полосами движения. Более конкретно, каждый стереоскопический датчик из множества стереоскопических датчиков 100a, 100b и т.д. выполнен с возможностью наблюдать за полосой движения и частью соседней полосы.
Другими словами, в примере, когда зона наблюдения начерчена на (определена на) предварительно определенном участке дороги, каждый стереоскопический датчик из множества стереоскопических датчиков 100a, 100b и т.д. конфигурируется, чтобы определять и наблюдать за основной зоной 150 наблюдения, определяющей зону 155 основного охвата предварительно определенного участка R дороги на предварительно определенном расстоянии от стереоскопического датчика 100a или 100b.
Кроме того, по меньшей мере, часть зоны основного охвата каждого стереоскопического датчика из множества стереоскопических датчиков типично направляется на прогнозируемую область оси транспортного средства для транспортного средства.
Как упомянуто выше, первый стереоскопический датчик 100a снабжается первой камерой, приспособленной, чтобы захватывать первое изображение, и второй камерой, приспособленной захватывать второе изображение. Кроме того, как показано на фиг. 1b, первый стереоскопический датчик 100a здесь сконфигурирован, чтобы быть направленным на дорогу, так что и первая камера, и вторая камера практически наблюдают за предварительно определенным участком R1 дороги через зону 155a основного охвата, так что первый стереоскопический датчик наблюдает за первым предварительно определенным участком R1 дороги.
Аналогично, второй стереоскопический датчик 100b снабжается первой камерой, приспособленной захватывать первое изображение, и второй камерой, приспособленной захватывать второе изображение. Кроме того, второй стереоскопический датчик 100b конфигурируется, чтобы быть направленным на дорогу так, что и первая камера, и вторая камера, по существу, наблюдают за вторым предварительно определенным участком R2 дороги через зону 155b основного охвата, так что второй стереоскопический датчик наблюдает за вторым предварительно определенным участком R2 дороги.
По существу, первый стереоскопический датчик 100a здесь конфигурируется, чтобы определять и наблюдать за первой основной зоной 151 наблюдения, определяющей зону 155a основного охвата в плоскости 160 наблюдения на предварительно определенном расстоянии от стереоскопического датчика 100a. Т.е., первая основная зона 151 наблюдения здесь соответствует первому предварительно определенному участку R1 дороги. Аналогично, второй стереоскопический датчик 100b здесь конфигурируется, чтобы определять и наблюдать за второй основной зоной 152 наблюдения, определяющей зону 155b основного охвата в плоскости 160 наблюдения на предварительно определенном расстоянии от стереоскопического датчика 100b, как видно в вертикальном направлении Z. Т.е., вторая основная зона 152 наблюдения здесь соответствует второму предварительно определенному участку R2 дороги.
Соответственно, суммарная основная зона наблюдения формируется посредством первой основной зоны 151 наблюдения и второй основной зоны 152 наблюдения. В этом контексте должно быть отмечено, что типично существует перекрытие между первой основной зоной 151 наблюдения и второй основной зоной 152 наблюдения, как показано на фиг. 1a и 1b.
В качестве примера, перекрытие между зоной основного охвата первого датчика и зоной основного охвата второго датчика может быть в диапазоне между 10-30%. Другими словами, перекрытие может содержать около 10-30% зоны основного охвата.
Таким образом, как дополнительно иллюстрировано на фиг. 2, зона 155a основного охвата в плоскости наблюдения, по меньшей мере, первого стереоскопического датчика 100a здесь перекрывает зону 155b основного охвата в плоскости наблюдения второго стереоскопического датчика 100b. Фиг. 2 схематично иллюстрирует дополнительные подробности и определения примерного варианта осуществления, как описано относительно фиг. 1a и 1b. На фиг. 2 иллюстрируется участок дороги или поверхность 191 дороги, включающая в себя две полосы 196, 198 движения. Участок дороги или поверхность 191 дороги охватывается как зоной 155a основного охвата первого стереоскопического датчика 100a, так и зоной 155b основного охвата второго стереоскопического датчика 100b.
Для легкости понимания и для удобства зона основного охвата может дополнительно быть определена посредством наличия зоны второстепенного охвата, типично соответствующей внешней области зоны основного охвата. Таким образом, любое изображение из захваченного первого изображения, захваченного второго изображения и обработанного изображения высоты включает в себя вторичную область обзора, соответствующую зоне второстепенного охвата.
По существу, зона наблюдения может быть определена так, что пара камер, т.е. первая камера и вторая камера стереоскопического датчика, по существу, наблюдают за предварительно определенным участком дороги в зоне наблюдения через зону основного охвата и областью соседнего участка дороги в зоне наблюдения через зону второстепенного охвата. Таким образом, каждый стереоскопический датчик конфигурируется, чтобы наблюдать за предварительно определенным участком дороги и областью соседнего участка дороги.
Для этого, как показано на фиг. 2, зона 157a второстепенного охвата первого стереоскопического датчика 100a, которая является частью зоны 155a основного охвата, направляется на и, таким образом, наблюдает за практически той же областью в плоскости 160 наблюдения, что и зона 157b второстепенного охвата второго стереоскопического датчика 100b, которая является частью зоны 155b основного охвата второго стереоскопического датчика 100b. По существу, система предоставляет возможность перекрытия 159 (заштрихованная область) между зонами основного охвата стереоскопических датчиков по всей зоне наблюдения (или плоскости наблюдения). Должно быть без труда понято, что та же конфигурация, что и определенная между первым стереоскопическим датчиком и вторым стереоскопическим датчиком, может аналогично быть определена между другими стереоскопическими датчиками из множества стереоскопических датчиков. Например, зона 155b основного охвата плоскости наблюдения второго стереоскопического датчика 100b может типично перекрывать зону 155c основного охвата плоскости наблюдения третьего стереоскопического датчика 100c и т.п., как может быть понято из фиг. 4.
В случае участка дороги система 200 выполнена с возможностью определять и наблюдать за зоной наблюдения, так что каждый стереоскопический датчик способен наблюдать за предварительно определенным участком дороги в зоне наблюдения через зону основного охвата и областью соседнего участка дороги в зоне наблюдения через зону второстепенного охвата зоны основного охвата. Таким образом, благодаря характеристике стереоскопического датчика, каждый стереоскопический датчик может быть сконфигурирован посредством способа, чтобы отслеживать предварительно определенный участок дороги и область соседнего участка дороги.
Кроме того, как иллюстрировано на фиг. 1a, каждый стереоскопический датчик 100a, 100b типично приспособлен для установки в позиции 192 установки над плоскостью наблюдения, как видно в вертикальном направлении Z. В целом, позиция установки ссылается на позицию стереоскопического датчика, находящегося непосредственно над плоскостью, как видно в вертикальном направлении Z. Каждая из пар 110, 120 камер типично направлены в плоскости 160 наблюдения под углом относительно упомянутой плоскости 160 наблюдения. В качестве примера, каждый стереоскопический датчик может быть установлен на высоте около 6,5 метров над плоскостью 160 наблюдения. Таким образом, хотя строго не требуется, множество стереоскопических датчиков существует в этом примерном варианте осуществления, и в других примерных вариантах осуществления, описанных в данном документе, установленные на опорной раме 190 и сконфигурированные, чтобы определять зону 150 наблюдения на поверхности 191 дороги под опорной рамой 190. Опорная рама может содержать одну или несколько отдельных структур, выполненных с возможностью собирать опорную раму, в то же время приспосабливаясь, чтобы нести, по меньшей мере, некоторые из компонентов системы наблюдения за дорожным движением, такие как стереоскопические датчики и т.п. Типично, опорная конструкция предоставляется в форме единой структуры для того, чтобы сдерживать затраты до минимума и уменьшать визуальное воздействие системы.
Как упомянуто выше, каждый стереоскопический датчик из множества стереоскопических датчиков конфигурируется, чтобы определять и наблюдать за основной зоной 150 наблюдения, определяющей зону 155 основного охвата. Направление и протяженность зоны наблюдения в данном документе ссылаются на главное направление зоны наблюдения, т.е. вдоль протяженности дороги, участка дороги, поверхности дороги и т.п.
Работа системы 200 наблюдения за дорожным движением может управляться посредством блока обработки или т.п. Таким образом, блок обработки здесь конфигурируется, чтобы управлять системой 200 наблюдения за дорожным движением, включающей в себя каждый стереоскопический датчик из множества стереоскопических датчиков 100a-100n. Типично, блок обработки содержит компьютерный программный продукт. Компьютерный программный продукт включает в себя компьютерно-читаемый носитель, имеющий сохраненные на нем компьютерное программное средство для инструктирования блоку обработки управлять работой системы наблюдения за дорожным движением. Кроме того, компьютерный программный продукт содержит код для выполнения способа согласно любому варианту осуществления из примерных вариантов осуществления, как описано далее в данном документе.
Как упомянуто выше, каждый стереоскопический датчик соединяется с блоком обработки, иногда просто обозначаемым средством обработки. Блок обработки, таким образом, конфигурируется, чтобы принимать и обрабатывать изображения. Другими словами, каждый стереоскопический датчик типично соединяется с блоком обработки, приспособленным обрабатывать изображения от стереоскопического датчика. Блок обработки может быть расположен практически в той же структуре, что и стереоскопический датчик, встроенным в тот же корпус, что и датчики, расположенные в корпусе рядом или на опорной структуре, на которой стереоскопический датчик установлен, или может быть расположен на расстоянии или может быть соединен со стереоскопическим датчиком посредством сети. Блок обработки способен выполнять обработку изображения по изображениям, захваченным посредством стереоскопического датчика, чтобы предоставлять возможность извлечения данных из упомянутых изображений. Блок обработки выполняет обработку изображения по изображениям, захваченным посредством стереоскопического датчика, чтобы создавать изображение высоты участка дороги, на который стереоскопический датчик направляется. Стереоскопический датчик и блок обработки могут типично быть соединены с кратковременным запоминающим устройством, в котором первое и второе изображения, также как и изображения высоты хранятся в течение предварительно определенного периода времени, т.е., достаточного времени для обработки.
Должно быть без труда понятно, что все стереоскопические датчики типично соединяются с одним блоком обработки. Однако блок обработки может включать в себя несколько подблоков, так что каждый подблок соединяется с одним единственным стереоскопическим датчиком. Подблоки могут затем связываться с первичным блоком обработки, центральным процессором или т.п.
Использование изображения высоты предоставляет возможность идентификации объектов на участке дороги, также как определение позиций упомянутых объектов, предоставляя возможность наблюдения за дорожным движением с лучшей и более высокой точностью по сравнению с другими решениями наблюдения за дорожным движением. Другим преимуществом измерения высот объектов, чтобы идентифицировать их и различать между ними, является то, что проблема теней, идентифицируемых как объекты, значительно уменьшается, что предоставляет возможность более достоверного и улучшенного наблюдения за характером дорожного движения.
Соответственно, блок 210 обработки типично дополнительно конфигурируется, чтобы обрабатывать изображения в одно изображение высоты. В качестве примера, блок обработки может быть сконфигурирован, чтобы обрабатывать изображения в одно изображение высоты перед передачей изображения высоты в центральную систему 220 управления. Блок обработки может дополнительно быть сконфигурирован, чтобы выполнять дополнительную обработку, такую как сжатие, перед передачей данных в центральную систему управления. Таким образом, меньшая полоса пропускания необходима в каналах связи.
Обращаясь теперь к фиг. 5a, изображается графическое представление способа для управления системой наблюдения за дорожным движением, как описано выше, согласно одному примерному варианту осуществления. Способ согласно примерным вариантам осуществления предоставляет возможность управлять работой системы 200 наблюдения за дорожным движением улучшенным образом, в то же время все еще наблюдая за дорожным движением и основными транспортными средствами на участке дороги.
В частности, по принципу способа согласно примерным вариантам осуществления, становится возможным предоставлять способ управления системой наблюдения за дорожным движением для определения характеристики транспортного средства более надежным и менее дорогостоящим образом по сравнению с известными до настоящего времени способами.
Соответственно, фиг. 5a показывает блок-схему последовательности операций способа 500 управления системой 200 наблюдения за дорожным движением, как иллюстрировано на фиг. 1a-4. Способ содержит этапы:
- захвата 504 первых изображений и вторых изображений со временем посредством множества стереоскопических датчиков;
- обработки 508 первого изображения и второго изображения от первого стереоскопического датчика 100a из множества стереоскопических датчиков, чтобы создавать первое изображение высоты из них посредством блока 210 обработки;
- анализа 512 упомянутого первого изображения высоты, чтобы обнаруживать движущийся объект, такой как транспортное средство, находящееся в первичной области обзора; и
- анализа 516 части первичной области обзора, по меньшей мере, первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика 100b, на основе обнаруженного движущегося объекта в первом изображении высоты, чтобы определять характеристику C движущегося объекта.
В этом примерном варианте осуществления характеристика C ссылается на число осей транспортного средства, в частности, грузового автомобиля. Таким образом, способ конфигурируется для обнаружения числа осей транспортного средства. Таким образом, способ содержит этап инициирования анализа части первичной области обзора первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных вторым стереоскопическим датчиком, на основе обнаруженного движущегося объекта в упомянутом первом изображении высоты, чтобы определять число осей движущегося объекта.
Этап 504 способа может включать в себя захват первых изображений посредством первой камеры и вторых изображений посредством второй камеры со временем посредством камер каждого датчика из множества стереоскопических датчиков. Должно быть без труда понятно, что в этот момент в способе 500 система 200 еще не идентифицировала транспортное средство, но ищет изображения с камер для соответствующего транспортного средства.
Обнаружение оси может быть выполнено однократно для каждого транспортного средства, когда все транспортное средство видимо в одно и то же время в оптимальной позиции. Альтернативно, обнаружение оси может выполняться непрерывно в течение всего проезда, охватываемого зоной наблюдения датчиков. Таким образом, способ конфигурируется, чтобы предоставлять взвешенные средние обнаружения осей. Кроме того, этот тип конфигурации может предоставлять возможность того, чтобы оси на длинных грузовых автомобилях и прицепах могли быть обнаружены по частям.
Таким образом, этапы 512 и 516 способа могут выполняться непрерывно по времени. Альтернативно, этапы 512 и 516 способа могут выполняться только в заданное время.
В целом, блок 210 обработки может быть сконфигурирован, чтобы принимать изображения от первой камеры стереоскопического датчика посредством первого сигнала на первом входе и принимать изображения от второй камеры стереоскопического датчика через второй сигнал на втором входе. Первый сигнал и второй сигнал могут быть видеосигналом, предоставляющим непрерывный поток изображений. Альтернативно, сигналы могут предоставляться в форме периодических моментальных снимков.
Посредством этапа 512 способа для анализа первого изображения высоты (от первого стереоскопического датчика 100a), чтобы обнаруживать движущийся объект, такой как транспортное средство 140, находящееся в первичной области обзора, становится возможным определять точное местоположение транспортного средства 140 в плоскости наблюдения, типично соответствующей предварительно определенному участку R1 дороги (первая основная зона 151 наблюдения). В этом примерном варианте осуществления этап 512 анализа первого изображения высоты, чтобы обнаруживать движущийся объект, такой как транспортное средство, находящееся в первичной области обзора, может типично включать в себя этап определения позиции транспортного средства по координатам в трехмерной декартовой системе координат. В качестве примера, транспортное средство 140 обнаруживается посредством анализа изображения высоты на предмет групп пикселов высоты. Типично, рамка отслеживания определяется вокруг группы, которая будет следовать за пикселами высоты, когда они перемещаются. Из этой рамки отслеживания становится возможным получать позицию, скорость, длину, высоту и ширину транспортного средства, которые должны быть использованы в вычислении другого датчика, который предоставляет лучший вид сбоку транспортного средства. Другими словами, когда транспортное средство 140 было обнаружено в стереоскопическом датчике, создающем первое изображение высоты посредством этапов 504, 508 и 512 способа, позиция транспортного средства используется, чтобы вычислять другой стереоскопический датчик, который имеет лучший вид сбоку для транспортного средства, например, второй стереоскопический датчик 100b.
Первое и/или второе изображение от этого другого стереоскопического датчика затем используется для анализа интересующих признаков (характеристик), которые определены на этапе 516 способа. В примерном варианте осуществления, описанном относительно фиг. 1a-4, характеристика C (интересующий признак) ссылается на число осей, т.е., способ настраивается, чтобы обнаруживать оси транспортного средства.
Обнаруженная позиция транспортного средства, которая получена на этапе 512 способа, в сочетании с известной позицией и областью обзора стереоскопического датчика 100b, используется для вычисления точной области, где в первом и/или втором изображении должен быть выполнен анализ.
Что касается этапа 516 способа, существует несколько различных возможностей определять характеристику транспортного средства. В качестве примера, характеристика транспортного средства может быть определена по образцу, соответствующему одной или нескольким статистическим моделям транспортного средства. Таким образом, этап анализа части первичной области обзора первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика 100b, содержит в этом примере этап определения характеристики C движущегося объекта (транспортного средства) посредством образца, соответствующего одной или нескольким статистическим моделям движущегося объекта (транспортного средства). Соответственно, этап определения характеристики C движущегося объекта основывается на образце, соответствующем одной или нескольким статистическим моделям движущегося объекта.
С помощью статистической модели, включающей в себя габариты транспортного средства и другие отличительные признаки, область для анализа может поддерживаться меньшей по размеру, и процесс анализа может поддерживаться более коротким и с более достоверными результатами. Статистическая модель будет передавать то, где вероятно позиции осей находятся для транспортного средства таких габаритов.
Этот тип анализа может быть выполнен посредством соответствия образца, когда рассматривается как хорошо известная технология анализа изображений. Другими словами, согласно этому примерному варианту осуществления, этап определения характеристики движущегося объекта с одной или несколькими статистическими моделями объекта здесь определяется на основе, или посредством, соответствия образца.
Главной частью анализа, таким образом, в этом примерном варианте осуществления является соответствие образцу. В случае с обнаружением оси шаблонные изображения колес сопоставляются со всеми позициями в области, где выполняется анализ. Позиции с высоким совпадением образца между шаблонами и первым и/или вторым изображением будут иметь высокую вероятность колеса и, таким образом, оси. С помощью статистической модели область для анализа будет сохраняться небольшой, а также наиболее подходящие шаблоны будут использованы, в зависимости, например, от габаритов транспортного средства, позиции на дороге, времени дня, погодных условий и т.д. Шаблоны типично состоят из более ранних обнаружений транспортных средств в системе.
Хотя строго необязательно, статистическая модель(и) типично основывается на стандартных уровнях высоты, стандартных уровнях длины, стандартных уровнях ширины, размере кабины, информации цифрового отпечатка, информации номерного знака, информации о погодных условиях и т.п. Статистическая модель(и) движущегося объекта может быть сохранена в памяти в системе, например, в блоке 210 обработки.
Точная позиция из наиболее вероятных позиций колес может быть сравнена с каждой другой, чтобы увидеть, действительно ли позиция колеса слегка выше других. Это будет указанием вероятной поднятой оси, т.е. колеса не в соприкосновении с дорогой. Указанию поднятых осей может дополнительно способствовать статистическая модель, чтобы сообщать, является ли указанная позиция вероятной позицией поднятой оси.
Кроме того, или альтернативно анализу с помощью соответствия образца, может быть использован алгоритм поиска низких значений расхождения. В качестве этапа в вычислении изображения высоты вычисляются значения расхождения. Все пикселы в первом изображении, которые имеют контраст выше некоторого порогового значения и не имеют одинаковую информацию в соответствующей позиции пикселов во втором изображении, будут расположены вдоль оси смещения. Если пиксел успешно обнаруживается во втором изображении, смещение будет преобразовано в значение расхождения, указывающее высоту этого пиксела. Для транспортного средства, особенно грузового автомобиля, только позиции с низкой высотой являются колесами. Таким образом, область для анализа, которая предварительно была вычислена, сканируется на предмет низких значений расхождения/высоты. Если обнаруживается группа низких значений ниже соответствующего порогового значения, это истолковывается посредством способа через блок обработки, чтобы указывать присутствие колеса/оси. Если группа содержит значения ниже другого даже более низкого порогового значения, это истолковывается посредством способа через блок обработки, чтобы указывать, что колесо находится в соприкосновении с землей и, таким образом, не поднято. Если группа не содержит эти низкие значения, это истолковывается посредством способа через блок обработки, чтобы указывать поднятую ось.
Таким образом, этап 516 способа может включать в себя этап определения нескольких значений расхождения высоты движущегося объекта, где группы значений расхождения ниже первого порогового значения указывают присутствие характеристики, например, присутствие колеса, соответствующее присутствию оси.
Соответственно, характеристика C движущегося объекта определяется посредством определения нескольких значений расхождения высоты движущегося объекта, где группы значений расхождения ниже первого порогового значения указывают присутствие колеса (или оси).
В этом типе конфигурации способа должно быть отмечено, что, если группа включает в себя значения ниже второго порогового значения, способ может дополнительно быть сконфигурирован, чтобы указывать, что колесо движущегося объекта (транспортного средства) находится в соприкосновении с землей.
Типично, несколько значений расхождения высоты движущегося объекта (транспортного средства) определяются из первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика 100b перед созданием его второго изображения высоты. Как хорошо известно в области техники, значения расхождения вычисляются из различий в позициях контрастов в первом и втором изображении. Значение расхождения равно значению высоты, но оно все еще не было перемещено в корректную позицию в позиции высоты, например, столб, видимый слегка сбоку, будет иметь несколько значений расхождения, но в изображении высоты значения расхождения все будут преобразованы в одну позицию с единственным наибольшим видимым значением расхождения/высоты. Это означает, что, например, борт прицепа будет иметь множество значений расхождения, включающих в себя значения расхождения для колес, в то время как в изображении высоты они все будут охвачены высотой от крыши.
Одной причиной для выполнения этого анализа по значениям расхождения вместо изображения высоты является то, что значения расхождения будут перемещены в их корректные 3D-позиции, и изображение высоты является видом этих 3D-позиций строго сверху, где колеса и борт транспортного средства будут скрыты значениями высоты от крыши транспортного средства.
В дополнение, или альтернативно, способ может быть сконфигурирован, чтобы выполнять анализ этапа 516 способа посредством устранения фона. В этом типе анализа алгоритм, согласующийся с моделью дороги, хранится в памяти, при этом модель содержит значения интенсивности для дороги при различных условиях освещения и позициях контрастов и т.д. Вычисленная область для анализа в первом и/или втором изображении будет иметь устраненный фон согласно модели фона. Области, которые все еще остаются в самой нижней части области анализа, тогда являются хорошими кандидатами для колес/осей.
В дополнение, или альтернативно, способ может быть сконфигурирован, чтобы выполнять анализ на этапе 516 способа с помощью алгоритмов, которые пытаются найти круги или части кругов, которые будут указывать колеса/оси.
Может быть несколько других способов обнаруживать колеса/оси и/или другие интересующие признаки в этой вычисленной области для анализа в первом и/или втором изображении стереоскопического датчика, который вычисляется как имеющий лучший боковой вид этой области.
Кроме того, в ситуации, когда интересует различие между грузовым автомобилем и автобусом, способ может быть сконфигурирован на этапе 516 способа, чтобы искать горизонтальные линии, которые на некоторых высотах могут указывать окна и, таким образом, повышенную вероятность автобуса. Аналогично, более низкие горизонтальные линии могут указывать дорожный просвет и, если он высокий и выше колес, вероятно указание транспортного средства в форме грузового автомобиля. С другой стороны, если он низкий и не полностью выше колес, более вероятно, что это автобус.
В примерном варианте осуществления, когда характеристика ссылается на обнаружение углов окон, анализ на этапе 516 способа может быть выполнен с помощью совпадения образца или устранения фона, когда транспортное средство находится в оптимальной позиции.
В примерном варианте осуществления, когда характеристика ссылается на обнаружение объектов, присоединенных к транспортному средству, анализ на этапе 516 способа может быть выполнен посредством соответствия образца или анализа плавности линий крыши и задних частей и т.д.
После завершения этапа 516 способа данные, относящиеся к определению характеристики, например, определению некоторого числа осей на транспортном средстве, могут быть переданы в память для дальнейшего использования. В качестве примера, определение некоторого числа осей может быть использовано в системы сбора платы за пользование дорогой, чтобы классифицировать транспортное средство для того, чтобы определять применимую оплату пошлины для транспортного средства.
Необязательно, хотя строго не требуется, способ может дополнительно содержать этап 502 способа для предварительного определения того, превышает ли транспортное средство предварительно определенное значение активации, такое как минимальное значение высоты, минимальное значение длины или минимальное число осей транспортного средства. На этом этапе способ может, в качестве пример, быть сконфигурирован, чтобы сравнивать транспортное средство с известными минимальными габаритами транспортных средств, имеющих более двух осей. Этот этап способа типично выполняется перед этапом 504 способа, относящимся к захвату первого и второго изображений посредством любого датчика из стереоскопических датчиков 100a, 100b.
В примерном варианте осуществления, когда способ конфигурируется, чтобы включать в себя этап 502 способа, как показано на фиг. 5b, этап 516 способа для анализа части первичной области обзора первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика (на основе обнаруженного движущегося объекта в первом изображении высоты, чтобы определять характеристику движущегося объекта), может быть активирован, когда транспортное средство превышает предварительно определенное значение активации. Однако, должно быть без труда понятно, что этап 516 способа может быть инициирован другими способами. Типично, блок 210 обработки конфигурируется, чтобы инициировать этап 516 способа, т.е. анализ части первичной области обзора из первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика, когда движущийся объект был обнаружен в первом изображении высоты посредством этапа 512 способа. В дополнение, или альтернативно, блок 210 обработки может быть сконфигурирован, чтобы инициировать анализ части первичной области обзора первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика по запросу от блока 210 обработки и/или оператора системы 200.
Дополнительно, должно быть отмечено, что в этом примерном варианте осуществления, и в других примерных вариантах осуществления, способ может необязательно, хотя строго не требуется, содержать этап обработки первого изображения и второго изображения, по меньшей мере, от второго стереоскопического датчика, чтобы создавать второе изображение высоты из них посредством блока обработки.
Фиг. 3 иллюстрирует изображение от стереоскопического датчика согласно примерному варианту осуществления настоящего изобретения. В качестве примера, оно ссылается на первое изображение, захваченное посредством второго стереоскопического датчика 100b. Более конкретно, транспортное средство 140 здесь находится в боковой области изображения, как видно в продольном направлении X. Боковая область обзора является частью первичной области обзора захваченного изображения, а более конкретно, вторичной областью обзора захваченного изображения. Как показано на фиг. 3, первичная область обзора здесь соответствует зоне 155b основного охвата, как описано в данном документе. Другими словами, вторичная область обзора захваченного изображения здесь соответствует зоне 157b вторичного охвата. Транспортное средство 140 на фиг. 3 дополнительно движется по полосе 196 движения. Другими словами, транспортное средство находится в боковой области обзора первичной области обзора изображения, или, как ранее упомянуто, в части первичной области обзора первого изображения, захваченного посредством второго стереоскопического датчика 100b. Как без труда понятно из фиг. 1a и 1b, главный движущийся объект, который должен наблюдаться посредством второго стереоскопического датчика 100b, является транспортным средством 141 (хотя не показано на фиг. 3). Выполняя этапы способа, как описано в данном документе, становится возможным обнаруживать транспортное средство 140 посредством этапа 512 способа и после этого посредством анализа изображения, как показано на фиг. 3, чтобы дополнительно определять число осей транспортного средства 140 посредством этапа 516 способа. Как может быть выяснено из фиг. 3, транспортное средство 140 является грузовым автомобилем, имеющим полный комплект из пяти колес (с каждой стороны), соответствующий полному комплекту из пяти осей.
Помимо обнаружения оси способ может из этого анализа изображения дополнительно определять расстояния до осей, и/или используется ли дополнительная ось, которая может быть поднята или опущена.
Примеры некоторых характеристик транспортного средства, которые могут быть определены посредством способа согласно примерному варианту осуществления, иллюстрируются на фиг. 6. Фиг. 6 показывает вид сбоку транспортного средства 140, включающего в себя переднюю ось 144 и комплект задних осей 145. На этом чертеже, одна из задних осей 146 находится в поднятой позиции. В качестве примера, характеристика транспортного средства 140, определенная посредством способа, как описано относительно предыдущих чертежей, может соответствовать числу осей, расстоянию a до оси, расстоянию b между поверхностью 191 земли и центром оси b и/или расстоянию c между поверхностью 191 земли и поднятой осью 146. Однако, несколько различных характеристик транспортного средства возможно определять посредством способа, который упомянут выше. В качестве другого примера, характеристика движущегося объекта (транспортного средства) может ссылаться на позицию шины транспортного средства, соответствующей оси транспортного средства для транспортного средства, как видно в трехмерной декартовой системе координат.
Кроме того, в ситуации дорожного движения, когда соответствующее транспортное средство загораживается другим транспортным средством, так что характеристика транспортного средства невидима в изображении, захваченном посредством стереоскопического датчика (например, второго датчика), способ может находить наиболее оптимальное захваченное изображение для анализа благодаря тому, что первый стереоскопический датчик может определять точную позицию транспортного средства, как видно в трехмерной декартовой системе координат.
По существу, во всех примерных вариантах осуществления, которые описаны в данном документе, и в других примерных вариантах осуществления, способ может, через этап 508 создания первого изображения высоты из изображений первого стереоскопического датчика и этап 512 анализа первого изображения высоты, обнаруживать транспортное средство, находящееся в первичной области обзора, идентифицировать то, загораживается ли транспортное средство другим транспортным средством или объектом, и определять, препятствует ли загораживающее транспортное средство точному определению характеристики транспортного средства, с тем, чтобы оценивать и решать, какое изображение из доступных изображений должно быть проанализировано, на основе обнаруженного транспортного средства в первом изображении высоты от первого датчика.
Фиг. 4 схематично иллюстрирует систему наблюдения за дорожным движением, управляемую посредством способа согласно примерному варианту осуществления, в которой система снабжается более чем двумя стереоскопическими датчиками. В этом примерном варианте осуществления система и способ могут быть выполнены с возможностью наблюдать за несколькими полосами 196, 198 дорожного движения и т.д. Другими словами, каждый стереоскопический датчик 100a, 100b, 100c и 100d выполнен с возможностью наблюдать за полосой движения и частью соседней полосы движения, соответственно. Полоса 160 наблюдения находится на поверхности 191 дороги, так что высота плоскости наблюдения совпадает с высотой дороги относительно стереоскопических датчиков 100a, 100b, 100c, 100d и т.д. Дорога здесь делится на четыре полосы, и стереоскопические датчики располагаются на опорной раме 190 над дорогой. Каждый стереоскопический датчик размещается над полосой движения и конфигурируется, чтобы наблюдать за этой конкретной полосой, с проецируемой позицией установки каждого стереоскопического датчика, находящейся на дороге непосредственно под датчиком. Каждый стереоскопический датчик 100a, 100b, 100c, 100d системы 200 определяет основную зону 151, 152, 153, 154 наблюдения, соответственно. Как и с основными зонами наблюдения, показанными на фиг. 1a, 1b и 2, совокупная основная зона наблюдения формируется посредством зон 151, 152, 153 и 154, определенных посредством множества стереоскопических датчиков, соответственно.
Соответственно, в этом типе конфигурации системы и способа система 200 выполнена с возможностью определять и наблюдать за совокупной зоной наблюдения, так что каждый стереоскопический датчик приспособлен наблюдать за предварительно определенным участком дороги в совокупной зоне наблюдения через зону основного охвата. Как упомянуто выше относительно примерного варианта осуществления, показанного на фиг. 2, область соседнего участка дороги в зоне наблюдения может наблюдаться через зону второстепенного охвата зоны основного охвата датчика. Таким образом, благодаря характеристике стереоскопического датчика, каждый стереоскопический датчик может быть сконфигурирован посредством способа, чтобы отслеживать предварительно определенный участок дороги и область соседнего участка дороги.
Примерный вариант осуществления на фиг. 4 может включать в себя любой один из признаков, функций, результатов и этапов способа, которые описаны относительно фиг. 1a-1b, 2, 3, 5 и 6. Единственным дополнительным признаком в примерном варианте осуществления на фиг. 4 является то, что система дополнительно содержит третий стереоскопический датчик 100c, соединенный с блоком 210 обработки. Помимо того, что третий стереоскопический датчик 100c направлен, чтобы наблюдать за другой зоной наблюдения, третий стереоскопический датчик конфигурируется аналогично первому стереоскопическому датчику и второму стереоскопическому датчику. Кроме того, система 200 может дополнительно включать в себя центральный блок 220 управления, сконфигурированный для приема данных от нескольких стереоскопических датчиков и возможно от нескольких блоков вспомогательной обработки, индивидуально предназначаемых для стереоскопических датчиков 100a, 100b, 100c.
Благодаря способу, который описан относительно примерных вариантов осуществления, операции системы наблюдения за дорожным движением улучшаются, так что стереоскопические датчики управляются, чтобы взаимодействовать друг с другом для того, чтобы обнаруживать движущийся объект посредством одного датчика и, на основе данных, относящихся к этой операции, т.е. обнаруженному объекту, идентифицировать наиболее оптимальное изображение среди захваченных изображений других датчиков системы с тем, чтобы определять характеристику транспортного средства надежным и точным образом, как дополнительно описывается далее в данном документе. Таким образом, становится возможным более точно получать информацию о некоторой характеристике транспортного средства. Таким образом, способ предоставляется согласно примерным вариантам осуществления, который предоставляет возможность простого, однако надежного и точного, определения характеристики, относящейся к транспортному средству.
Хотя изобретение было описано относительно конкретных комбинаций конкретных стереоскопических датчиков, должно быть без труда понятно, что более чем два стереоскопических датчика могут быть включены в систему наблюдения за дорожным движением и стереоскопические датчики могут быть объединены в других конфигурациях также, которые ясны для специалиста в области техники при изучении текущей заявки. Таким образом, вышеприведенное описание примерного варианта осуществления настоящего изобретения и сопровождающие чертежи должны рассматриваться в качестве неограничивающего примера изобретения, и рамки защиты определяются посредством прилагаемой формулы изобретения. Любой ссылочный символ в формуле изобретения не должен истолковываться как ограничивающий рамки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВОЙНОЙ СТЕРЕОСКОПИЧЕСКИЙ ДАТЧИК | 2015 |
|
RU2696464C2 |
| СИСТЕМА ДЛЯ УМЕНЬШЕНИЯ СЛЕПОЙ ЗОНЫ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2707496C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ДОРОЖНОЙ СИТУАЦИЕЙ С ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2432276C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2012 |
|
RU2544775C1 |
| СЧЕТЧИК ПОДСЧЕТА ПАССАЖИРОВ НА БАЗЕ СТЕРЕОЗРЕНИЯ | 2022 |
|
RU2785198C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2571367C1 |
| УСТРОЙСТВО ДЛЯ СИСТЕМ СБОРА ДОРОЖНЫХ ПОШЛИН ИЛИ ТЕЛЕМАТИЧЕСКИХ СИСТЕМ | 2013 |
|
RU2658204C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ КАПЕЛЬ ВОДЫ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ УСТРОЙСТВА ОБНАРУЖЕНИЯ КАПЕЛЬ ВОДЫ | 2013 |
|
RU2644518C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СПЛОШНЫХ ОБЪЕКТОВ И СПОСОБ ОБНАРУЖЕНИЯ СПЛОШНЫХ ОБЪЕКТОВ | 2012 |
|
RU2563534C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2629433C2 |
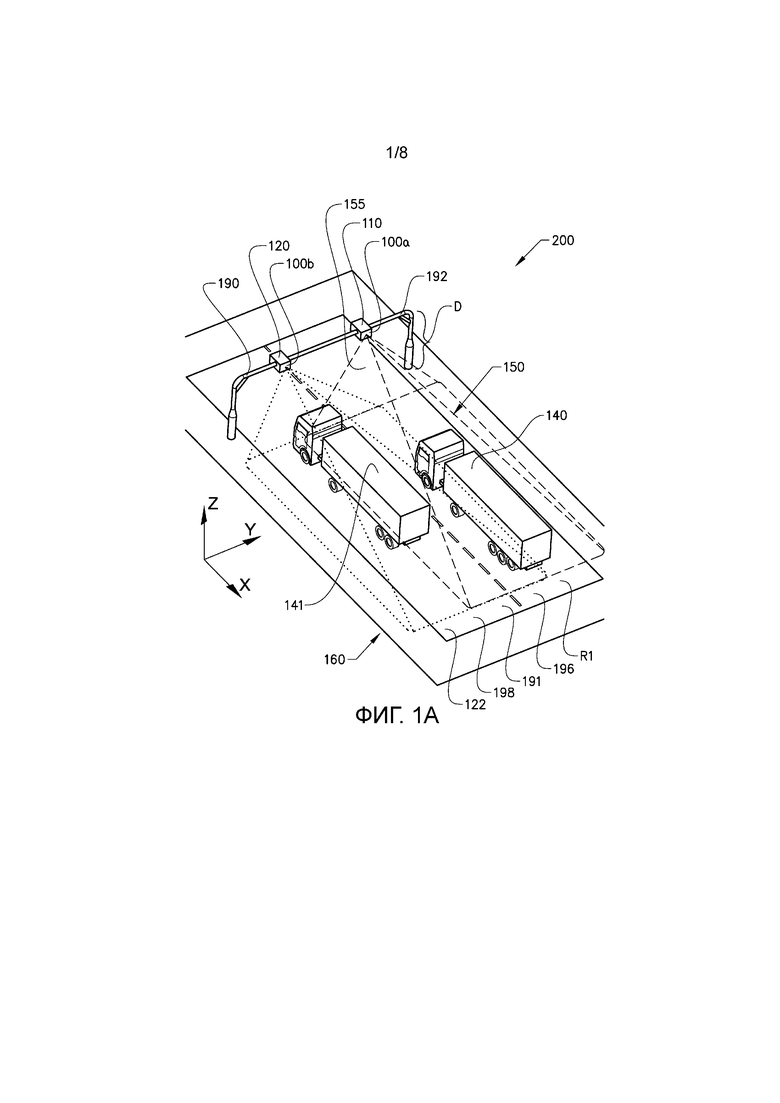
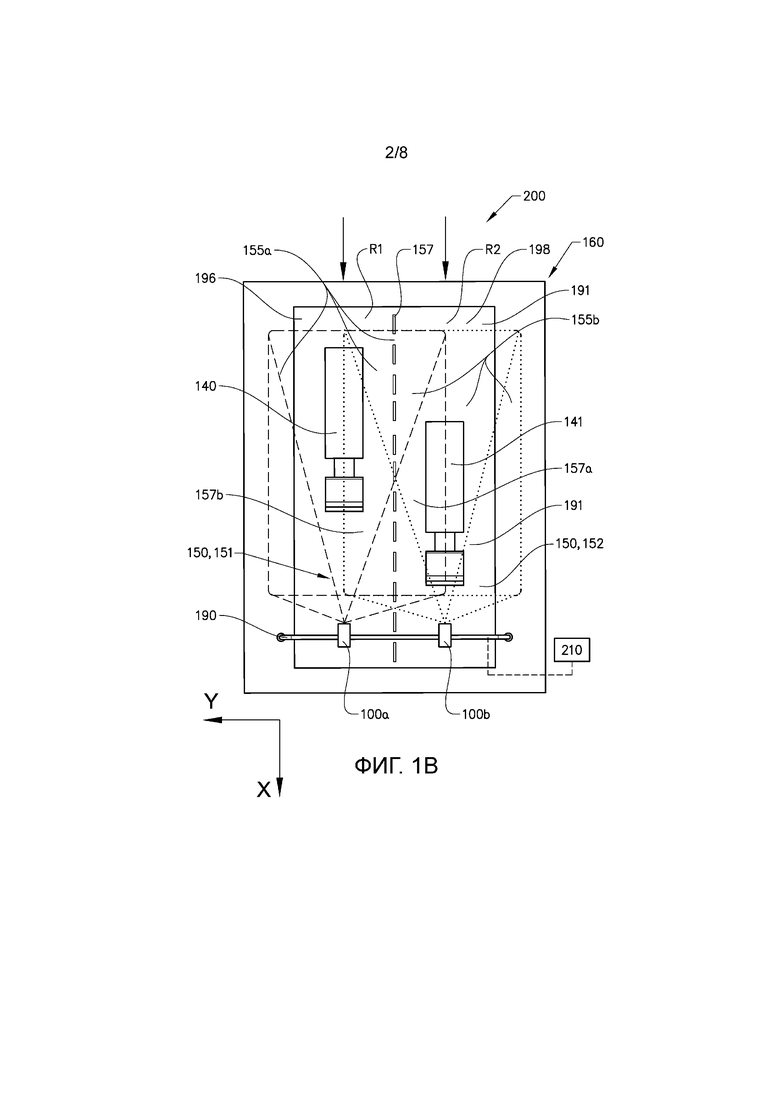
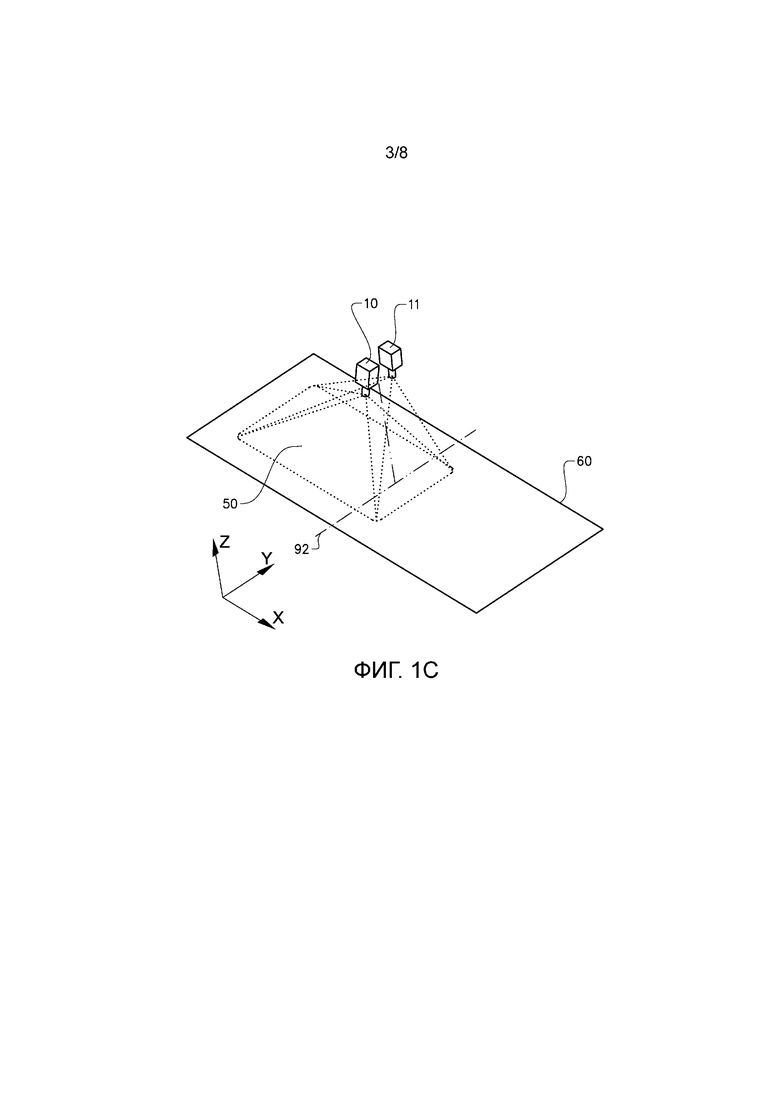
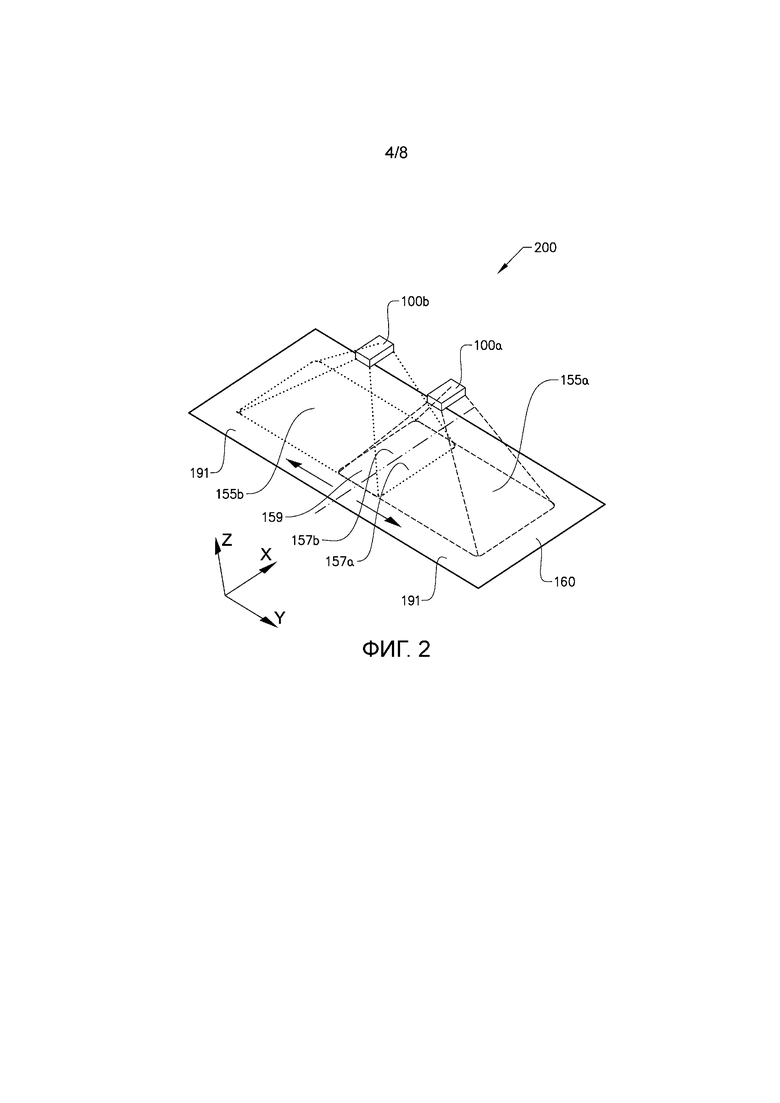
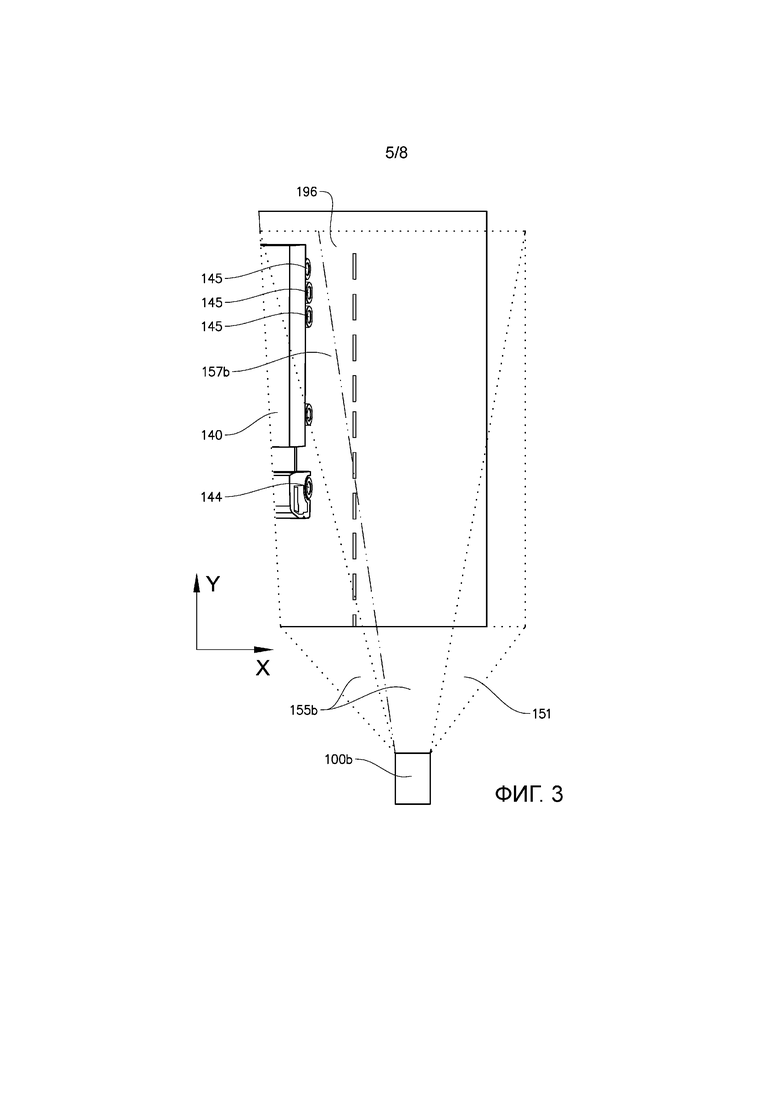
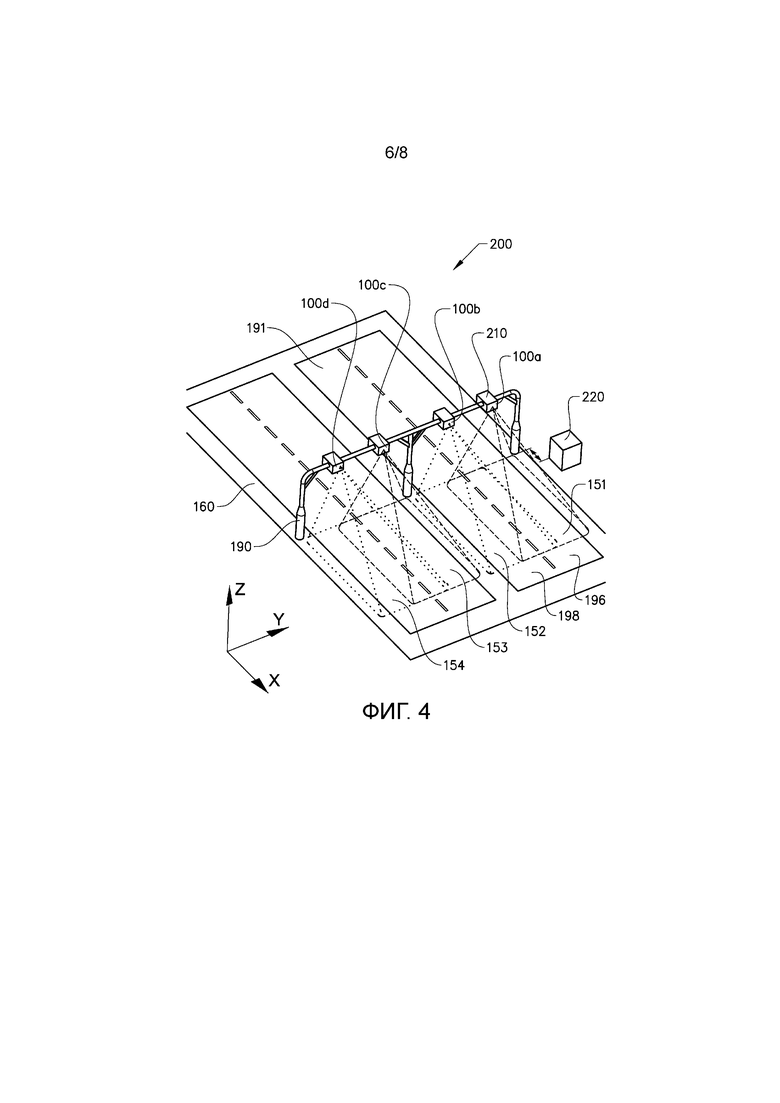
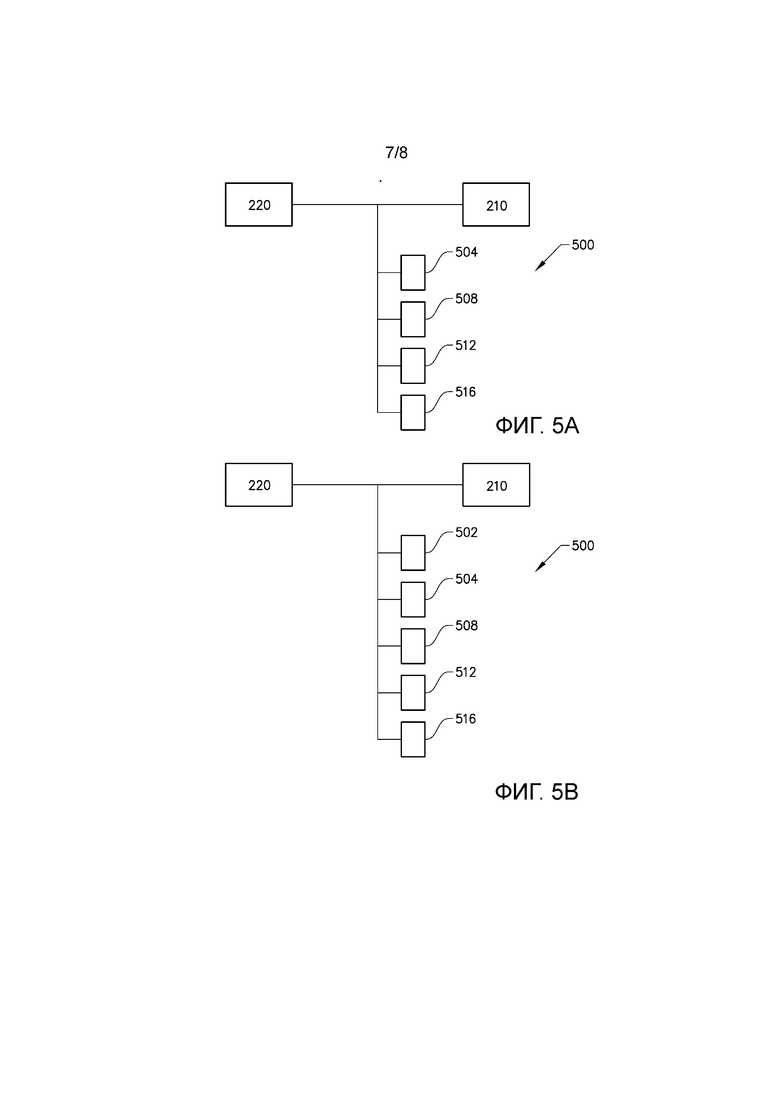
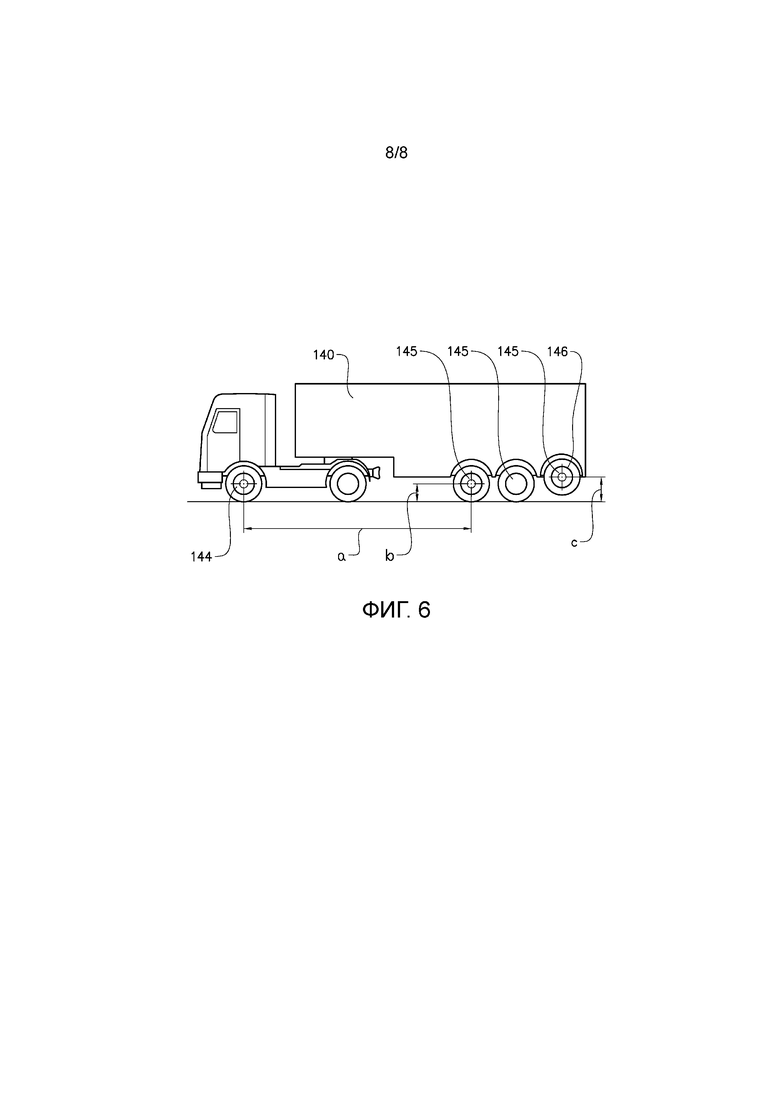
Группа изобретений относится к управлению системой наблюдения за дорожным движением. Группа изобретений содержит блок обработки, реализующий способ управления системой наблюдения за дорожным движением, включающий этапы на которых: захватывают первые изображения и вторые изображения со временем посредством множества стереоскопических датчиков. Обрабатывают первое изображение и второе изображение от первого стереоскопического датчика из множества стереоскопических датчиков, для создания первого изображения высоты. Анализируют первое изображение высоты для обнаружения движущегося объекта, находящегося в первичной области обзора. Анализируют части первичной области обзора, по меньшей мере, первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика на основе обнаруженного движущегося объекта в упомянутом первом изображении высоты, чтобы определять характеристику движущегося объекта. Обеспечивается надежное и точное определение характеристик транспортного средства. 2 н. и 13 з.п. ф-лы, 9 ил.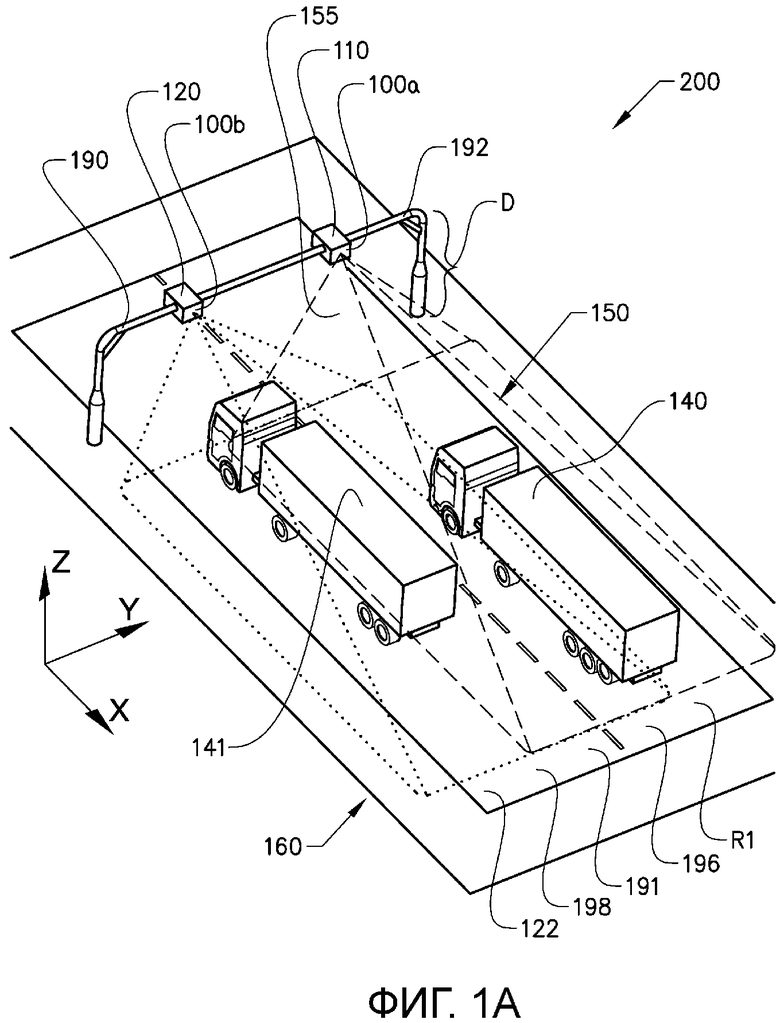
1. Способ (500) управления системой (200) наблюдения за дорожным движением, система имеет множество стереоскопических датчиков, соединенных (100a-100d) с блоком (210) обработки, при этом каждый стереоскопический датчик из множества стереоскопических датчиков (100a-100d) конфигурируется для захвата первого изображения и второго изображения, способных быть обработанными в изображение высоты посредством блока (210) обработки, и дополнительно конфигурируется, чтобы определять и наблюдать за основной зоной (150) наблюдения, определяющей зону (155) основного охвата в диапазоне (160) наблюдения на предварительно определенном расстоянии от стереоскопического датчика, так что любое изображение из захваченного первого изображения, захваченного второго изображения и обработанного изображения высоты, включает в себя первичную область обзора, соответствующую зоне (155) основного охвата стереоскопического датчика, при этом способ содержит этапы, на которых
захватывают (504) первые изображения и вторые изображения со временем посредством множества стереоскопических датчиков;
обрабатывают (508) первое изображение и второе изображение от первого стереоскопического датчика из множества стереоскопических датчиков, чтобы создавать первое изображение высоты из них посредством блока обработки;
анализируют (512) упомянутое первое изображение высоты, чтобы обнаруживать движущийся объект, такой как транспортное средство, находящееся в пределах первичной области обзора первого стереоскопического датчика; и
анализируют (516) часть первичной области обзора, по меньшей мере, первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика, на основе обнаруженного движущегося объекта в упомянутом первом изображении высоты, чтобы определять характеристику (C) движущегося объекта.
2. Способ (500) по п. 1, при этом характеристика (C) является любым одним из числа осей транспортного средства, наличия окон, дорожного просвета, угла переднего окна и указания объектов, присоединенных к верху или позади транспортного средства.
3. Способ (500) по п. 1 или 2, при этом зона (155a) основного охвата в диапазоне (160) наблюдения, по меньшей мере, первого стереоскопического датчика (100a) перекрывает зону (155b) основного охвата в диапазоне (160) наблюдения второго стереоскопического датчика (100b).
4. Способ (500) по п. 1 или 2, при этом этап определения характеристики (C) движущегося объекта основывается на образце, совпадающем с одной или несколькими статистическими моделями движущегося объекта.
5. Способ (500) по п. 4, при этом любая модель из статистических моделей основывается на стандартных уровнях высоты, стандартных уровнях длины, стандартных уровнях ширины, размере кабины, информации цифрового отпечатка, информации номерного знака, информации о погодных условиях и т.п.
6. Способ (500) по любому из пп. 1, 2, 5, при этом характеристика (C) движущегося объекта определяется посредством определения нескольких значений расхождения высоты движущегося объекта, где группы значений расхождения ниже первого порогового значения указывают наличие оси.
7. Способ (500) по п. 6, при этом, если группа включает в себя значения ниже второго порогового значения, способ конфигурируется, чтобы указывать, что колесо движущегося объекта находится в соприкосновении с землей.
8. Способ (500) по п. 6 или 7, при этом несколько значений расхождения высоты движущегося объекта (140) определяются из первого значения, второго значения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика (100b) перед созданием его второго изображения высоты.
9. Способ (500) по любому из пп. 1, 2, 5, 7, при этом каждый стереоскопический датчик из множества стереоскопических датчиков (100a-100d) выполнен с возможностью наблюдать за полосой движения, так что система (200) конфигурируется, чтобы наблюдать за множеством полос (196, 198) движения.
10. Способ (500) по любому из пп. 1, 2, 5, 7, при этом, по меньшей мере, часть зоны основного охвата каждого стереоскопического датчика из множества стереоскопических датчиков (100a-100d) направлена на прогнозируемую область оси транспортного средства для транспортного средства.
11. Способ (500) по любому из пп. 1, 2, 5, 7, при этом способ дополнительно содержит этап, на котором предварительно определяют (502), превышает ли транспортное средство предварительно определенное значение активации, такое как минимальное значение высоты, минимальное значение длины или минимальное число осей транспортного средства.
12. Способ (500) по п. 11, при этом этап анализа (516) части первичной области обзора первого изображения, второго изображения и/или комбинации первого и второго изображений, захваченных посредством второго стереоскопического датчика, на основе обнаруженного движущегося объекта в первом изображении высоты, чтобы определять характеристику движущегося объекта, активируется, когда транспортное средство превышает предварительно определенное значение активации.
13. Способ (500) по любому из пп. 1, 2, 5, 7, 12, при этом множество стереоскопических датчиков (100a-100d) устанавливается на опорной раме (190) и конфигурируется, чтобы определять плоскость (160) наблюдения на поверхности (191) дороги под опорной рамой (190).
14. Способ (500) по п. 1, при этом способ конфигурируется, чтобы определять число осей транспортного средства.
15. Блок (210) обработки для системы (200) наблюдения за дорожным движением, сконфигурированный для реализации способа (500) по любому из предшествующих пунктов.
| JP 2012103919 A, 31.05.2012 | |||
| СПОСОБ НАБЛЮДЕНИЯ ЗА ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСОЙ И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2008 |
|
RU2523167C2 |
| US 7224382 B2, 29.05.2007 | |||
| US 20140098194 A1, 10.04.2014. | |||

