Область техники, к которой относится изобретение
Изобретение относится к области устройств для систем сбора дорожных пошлин или телематических систем. В частности, изобретение относится к устройству, которое снабжено пиксельным датчиком изображения, где датчик изображения приспособлен таким образом, чтобы он был расположен выше контролируемой зоны, предусмотренной на дороге. Контролируемая зона имеет протяженность вдоль направления дороги, а датчик изображения приспособлен таким образом, чтобы он был установлен между первой и второй концевой зоной контролируемой зоны.
Уровень техники
Системы сбора дорожных пошлин используются для выявления и регистрации транспортных средств, которые используют дорогу, которая является объектом взимания дорожных пошлин, иногда в пересчете на налоги. Чаще всего используемые системы сбора дорожных пошлин содержат платформу с несколькими устройствами, включая приемопередатчик и датчики, установленные на ней. Приемопередатчики используются для автоматической регистрации прохождения транспортных средств с транспондерами. Транспортные средства с транспондерами автоматически подвергались сбору дорожной пошлины каждый раз, когда они проходили станцию для сбора дорожных пошлин. Датчики, предпочтительно фоторегистраторы, используются для захвата изображения номерных знаков проходящих транспортных средств, без транспондеров. В зависимости от концепции системы, изображения могут быть использованы для осуществления сбора пошлины исходя из номеров на номерных знаках, или они служат в качестве очевидного подтверждения неуплаты, в случае когда требуются транспондеры.
Как правило, два фоторегистратора устанавливаются на платформе попарно и размещаются таким образом, чтобы они улавливали одну полосу контролируемой зоны. Первый из двух фоторегистраторов направляется к первой концевой зоне, в которой транспортные средства входят в контролируемую зону, а второй из двух фоторегистраторов направляется ко второй концевой зоне, в которой транспортные средства покидают контролируемую зону. Фоторегистраторы фокусируются на предварительно заданной высоте выше дороги, соответствующей высоте номерного знака проходящих транспортных средств. Высоту предварительно задают, исходя из самой распространенной высоты номерных знаков на стандартном транспортном средстве. Изображения, которые захватываются фоторегистраторами, обычно обрабатываются в системе ANPR автоматического распознавания номерных знаков).
Как было описано в US 6959869B, фоторегистраторы захватывают передние и задние номерные знаки, и номера автоматически сопоставляются друг с другом устройством управления, таким как компьютер. С помощью этой системы для захвата как переднего номерного знака, так и заднего номерного знака необходимы по меньшей мере два фоторегистратора. Приемопередатчик также необходим для автоматического считывания и отслеживания транспондеров. Следовательно, для выявления, отслеживания и регистрации транспортных средств используются несколько отдельных устройств, что повышает стоимость систем сбора дорожных пошлин и повышает визуальное воздействие платформы с несколькими установленными на ней устройствами.
С помощью систем, описанных выше, система отслеживания, применяемая между зонами захвата, должна обеспечивать, чтобы изображения, захватываемые двумя фоторегистраторами, можно было бы связать с одним транспортным средством.
Устройства также часто бывают необходимыми для классификации транспортных средств исходя из физических характеристик, таких как размер или объем транспортного средства.
Таким образом, возникает потребность в усовершенствованном устройстве для использования в станциях для сбора дорожных пошлин, с устранением вышеупомянутых недостатков.
Сущность изобретения
Среди прочего, задачей настоящего изобретения является обеспечение устройства для систем сбора дорожных пошлин или телематических систем, которое устраняет проблемы системы, требующей наличия более одного устройства, например, нескольких фоторегистраторов или датчиков для выявления, отслеживания и классифицирования транспортных средств. Эта цель достигается с помощью устройства, снабженного датчиком изображения, установленным выше контролируемой зоны, и снабженного широкоугольной оптической системой. Изобретение также описывает способ управления устройством для систем сбора дорожных пошлин или телематических систем.
Настоящее изобретение относится к устройству для систем сбора дорожных пошлин или телематических систем, снабженному датчиком изображения. Датчик изображения приспособлен таким образом, чтобы он был расположен выше контролируемой зоны в плоскости на заранее заданном расстоянии от устройства. Это заранее заданное расстояние должно быть адаптировано таким образом, чтобы оно представляло собой расстояние, на котором устройство установлено над дорогой, которой оно предусмотрено вести мониторинг. Контролируемая зона обладает удлиненной протяженностью, которая, когда устройство находится в использовании, адаптирована таким образом, чтобы она была выровнена с направлением дороги. Датчик изображения приспособлен таким образом, чтобы он был расположен посередине между первой и второй концевой зоной упомянутой контролируемой зоны для захвата как переднего, так и заднего вида транспортного средства, проезжающего через контролируемую зону.
Датчик изображения снабжен широкоугольной оптической системой, которая обладает рефракцией и которая установлена таким образом относительно датчика изображения, чтобы изображение, захватываемое датчиком изображения, содержало как упомянутую первую, так и упомянутую вторую концевую зону. Эффект этого состоит в том, что для идентификации транспортных средств, проходящих через контролируемую зону, необходим только один датчик изображения, поскольку датчик изображения может захватывать переднюю часть транспортных средств, входящих в первую концевую зону, а также заднюю часть транспортных средств, выходящих из второй концевой зоны. Изображения содержат характеристики транспортных средств, которые могут быть использованы для идентификации, такие как номерные знаки или другие отдельные метки, т.е. характерные признаки («отпечатки пальцев») транспортного средства.
Изображение, захватываемое датчиком изображения, также содержит зону посередине между первой и второй концевой зоной, т.е. середину контролируемой зоны, следовательно, вся контролируемая зона на изображении захватывается. В середине контролируемой зоны датчик изображения захватывает транспортные средства в основном сверху.
Согласно одному аспекту настоящего изобретения разрешение изображения, захватываемого датчиком изображения, меняется, и оптическую систему устанавливают таким образом относительно датчика изображения, чтобы разрешение было более высоким в части изображения, где захватывается область с высоким приоритетом, в частности первая и вторая концевые зоны, и более низким в части изображения, где захватываются области с низким приоритетом, в частности зона между первой и второй концевыми зонами. Является предпочтительным, чтобы область с высоким приоритетом представляла собой первую и вторую концевую зону. То, какую область контролируемой зоны выбирают в качестве области с высоким приоритетом, зависит от намеченного использования устройства. Первая и вторая концевые зоны представляют собой области, в которых транспортное средство может захватываться датчиком изображения под углом таким образом, чтобы передняя часть и задняя часть транспортного средства захватывались соответствующим образом. Поэтому первую и вторую концевые зоны часто выбирают в качестве областей с высоким приоритетом в системах для сбора платежей, поскольку затем передняя часть транспортного средства, по мере того как оно входит в первую концевую зону, и задняя часть транспортного средства, по мере того как оно выходит из второй концевой зоны, захватываются на изображении с наибольшим разрешением.
В системах для сбора дорожных пошлин среднюю зону часто рассматривают в качестве области с низким приоритетом. В средней зоне транспортные средства захватываются датчиком изображения сверху при низком разрешении, и это имеет место, поскольку для отслеживания транспортного средства на протяжении области с низким приоритетом или для классифицирования транспортного средства изображение с высоким разрешением верхнего транспортного средства не является необходимым. Однако поскольку датчик изображения также захватывает транспортное средство в средней зоне, транспортное средство можно отслеживать во всей контролируемой зоне. В зависимости от применения устройства, области с высоким и низким приоритетом могут быть предусмотрены различным образом в пределах контролируемой зоне.
В описании изобретения, которое следует, первую и вторую концевые зоны следует рассматривать как эквивалентные областям с высоким приоритетом. В описании, которое следует, зона посередине между первой и второй концевыми зонами, т.е. средняя зона, будет эквивалентна области с низким приоритетом. Области с высоким и низким приоритетом могут быть предусмотрены где-либо в контролируемой зоне и/или могут присутствовать в большем или в меньшем количестве без отступления от объема изобретения.
Один предпочтительный признак устройства состоит в том, что датчик изображения представляет собой пиксельный датчик изображения, и в том, что разброс в разрешении возрастает с изменением пиксельной плотности датчика изображения. Пиксельная плотность является более высокой в части, где датчик изображения захватывает первую и вторую концевую зону, и пиксельная плотность является более низкой в части, где датчик изображения захватывает середину контролируемой зоны. Датчик изображения, таким образом, может содержать более малое количество пикселей по сравнению с ситуацией, когда датчик изображения обладает постоянной пиксельной плотностью по всему датчику изображения. Снижение пиксельной плотности достигается за счет поддержания высокого разрешения в области с высоким приоритетом. Высокое разрешение облегчает идентификацию транспортного средства с помощью номерных знаков или других идентификаторов на передней части и на задней части транспортного средства и, таким образом, является предпочтительным захватывать датчиком изображения области с высоким приоритетом с высоким разрешением.
Другой предпочтительный признак устройства состоит в том, что разброс в разрешении обусловлен рефракцией упомянутой оптической системы, в результате чего упомянутая оптическая система проецирует одну единицу поверхности контролируемой зоны на различное количество пикселей в зависимости от того, где в контролируемой зоне расположена упомянутая одна единица поверхности. Рефракция оптической системы может меняться с отрезанием, измельчением или полировкой линзы датчика изображения. Первая и вторая концевые зоны регистрируются посредством рефракции оптической системой для проецирования на большое количество пикселей в датчике изображения относительно области концевых зон. Середина контролируемой зоны регистрируется посредством рефракции для проецирования на меньшее количество пикселей относительно области середины контролируемой зоны. Следовательно, разрешение на изображении для первой и второй концевых зон, т.е. областей с высоким приоритетом, является более высоким, чем разрешение остальной контролируемой зоны на захватываемом изображении. Это способствует тому, чтобы вся контролируемая зона могла бы захватываться с помощью датчика изображения с меньшим количеством пикселей, чем когда и концевые зоны, и средняя зона контролируемой зоны были спроецированы на одно и то же количество пикселей относительно области соответствующей зоны. Следовательно, разрешение для первой и второй концевой зоны является более высоким, чем это могло бы быть при использовании устройства, которое не способствует изменению рефракции оптической системы. Таким образом, для достижения разрешения первой и второй концевой зоны может быть использовано меньшее количество пикселей, по-прежнему обеспечивая захват всей контролируемой зоны на одном изображении. Меньшее количество пикселей приводит к более низким затратам на датчик изображения и на изображения с меньшим количеством пикселей. Таким образом, необходима меньшая память данных и меньшая обработка данных и скорость обработки всей системы при использовании устройства повышается, а ее стоимость становится более низкой.
Также может быть возможным сочетание изменения пиксельной плотности датчика изображения и рефракции оптической системы. Сочетание будет повышать разницу в разрешении между частью изображения, захватывающей первую и вторую концевую зону, и частью, захватывающей остаток контролируемой зоны. Первая и вторая концевые зоны могут быть спроецированы посредством оптической системы на большую часть датчика изображения относительно их фактической области, где определяется рефракцией оптической системы, и причем эта большая часть датчика обладает высокой пиксельной плотностью. Аналогично, среднюю зону области контроля проецируют посредством оптической системы на меньшую часть датчика изображения относительно ее фактической области, причем эта меньшая область обладает низкой пиксельной плотностью. Таким образом, характеристики транспортных средств в первой и во второй концевых зонах являются четкими и легко считываются на изображении, получаемом из датчика изображения, что обеспечивает надежную идентификацию транспортных средств.
В одном варианте воплощения настоящего изобретения оптическая система содержит зеркало и/или линзу, расположенную перед датчиком изображения и вызывающую рефракцию. Таким образом, оптическая система может быть расположена рядом, но не перед датчиком изображения. Это способствует гибкости в изготовлении устройства, а также в размещении датчика изображения и оптической системы в устройстве и на платформе.
Ширину и длину контролируемой зоны, захватываемой датчиком изображения, определяют по характеристикам широкоугольной оптической системы. Один предпочтительный признак оптической системы состоит в том, что она предусмотрена с формой, обеспечивающей прямоугольную контролируемую зону. Следовательно, оптическая система может захватывать ширину только одной одиночной полосы или ширину нескольких полос. Характеристики оптической системы также определяют длину контролируемой зоны и, следовательно, место, где первая и вторая концевые зоны расположены вдоль дороги. Независимо от формы оптической системы, рефракция оптической системы может меняться, как было описано выше.
В качестве альтернативы, форма оптической системы может иметь тип рыбьего глаза, и она охватывает область контроля, имеющую протяженность вдоль направления дороги, а также ширину нескольких полос дороги.
Один предпочтительный признак настоящего изобретения состоит в том, что устройство может составлять часть или может быть скомбинировано с датчиками, обеспечивающими стереоскопические и/или многомерные изображения, на которых могут быть выявлены типы транспортных средств и/или высота транспортных средств. Эффект этого состоит в том, что может быть идентифицирован тип транспортного средства. Путем определения, например, высоты транспортного средства, проходящего через контролируемую зону, можно автоматически определить плату для этого транспортного средства, например, если это грузовик или легковой автомобиль.
Устройство также может содержать приемопередатчик для отправления и приема информации от транспондеров проходящих транспортных средств. Посредством этого с транспортных средств с транспондерами автоматически взимается оплата за проезд, и их не приходится идентифицировать по изображениям, захватываемым датчиком изображения.
Объем настоящего изобретения также охватывает систему устройств согласно настоящему изобретению. Такая система, имеющая доступ к изображениям, захватываемым множеством устройств.
Предпочтительно, система устройств может комбинировать информацию, излеченную из изображений, для отслеживания транспортного средства, движущегося между контролируемыми зонами, соответствующим различным датчикам изображения. Один датчик изображения может соответствовать одной полосе дороги в контролируемой зоне. Если транспортное средство входит в первую концевую зону на одной полосе и выходит из второй концевой зоны на другой полосе, т.е. меняет полосу в середине контролируемой зоны, то система может комбинировать информацию, излеченную из изображений, захватываемых двумя соответствующими датчиками. Эффект этого состоит в том, что транспортное средство не может проходить через контролируемую зону без регистрации системой. Транспортное средство также может захватываться датчиком изображения в середине контролируемой зоны. Следовательно, транспортное средство может легче отслеживаться по всей контролируемой зоне датчиком изображения, непрерывно захватывающим изображения всех возможных местоположений в контролируемой зоне.
Согласно другому аспекту системы, она может комбинировать информацию из изображений, отснятых различными датчиками изображения, для оценки высоты, длины и/или объема транспортного средства. Таким образом, можно определять тип транспортного средства, а дополнительные стереоскопические датчики могут быть исключены.
Другим аспектом изобретения является способ управления устройством или система согласно вышеописанному подходу, в котором датчик непрерывно захватывает изображения контролируемой зоны. Никакое транспортное средство не может проходить контролируемую зону без того, чтобы быть захватываемым датчиком, поскольку изображения захватываются постоянно. Таким образом, способ заслуживает доверия в отношении обеспечения того, что все транспортные средства будут зарегистрированы и что дорожная пошлина будет наложена на все проходящие транспортные средства, которые должны платить дорожную пошлину.
Согласно другому аспекту способа, устройство или система согласно вышеописанному подходу приспособлены таким образом, чтобы ими можно было управлять для сохранения выходного сигнала с датчика, причем выходной сигнал содержит, по меньшей мере, первое и второе изображение, где первое изображение содержит характеристики передней части транспортного средства в первой концевой зоне, а второе изображение содержит характеристики задней части транспортного средства во второй концевой зоне. Первое и второе изображения, сохраненные в виде выходных данных, с датчика связываются в пару и могут быть использованы для идентификации проходящего транспортного средства. Является предпочтительным, чтобы создание пар было осуществлено путем идентификации номера на номерном знаке, считываемого на изображении. Пара изображений также может быть использована для контроля того, что транспортное средство не несет на себе фальшивого номерного знака, т.е. номер на номерном знаке, идентифицируемый в первой концевой зоне, должен быть идентифицирован на изображении второй концевой зоны в течение разумного времени. Если это не происходит, может оказаться, что транспортное средство несет на себе поддельный номерной знак. Пара изображений также может быть сохранена как подтверждение того, что транспортное средство на самом деле прошло зону сбора дорожных пошлин, в случае спора о наложенном дорожной пошлине.
Изображения, содержащие характеристики передней части транспортного средства или задней части, либо транспортного средства, несущего на себе транспондер, возможно, не будут сохранены в качестве выходных данных. Является предпочтительным, чтобы с этих транспортных средств дорожные пошлины взымались автоматически; таким образом, изображения не являются необходимыми для идентификации. Однако изображения могут быть сохранены для других целей.
Другой предпочтительный аспект способа состоит в том, что выходные данные содержат третье изображение, где третье изображение содержит транспортное средство посередине между первой и второй концевыми зонами. Транспортное средство видно сверху посередине между первой и второй концевыми зонами. Таким образом, транспортное средство можно отслеживать по всему пути через контролируемую зону, и при его прохождении поддерживать подтверждение в форме изображения. Это становится возможным при непрерывном захватывании датчиком.
Согласно способу, устройство также может быть скомбинировано с другой технологией для идентификации транспортного средства, такой как радиочастотная идентификация.
Краткое описание чертежей
Настоящее изобретение будет подробно описано со ссылкой на чертежи, на которых:
Фигура 1 показывает схематическое изображение одного варианта воплощения настоящего изобретения;
Фигура 2 показывает схематическое изображение другого варианта воплощения настоящего изобретения;
Фигура 3 показывает схематическое изображение настоящего изобретения, если на него смотреть сверху;
Фигура 4 показывает схематическое изображение датчика изображения согласно изобретению.
Подробное описание чертежей
В дальнейшем будут описаны варианты воплощения настоящего изобретения. Однако изобретение не ограничено ими. Все чертежи являются схематическими.
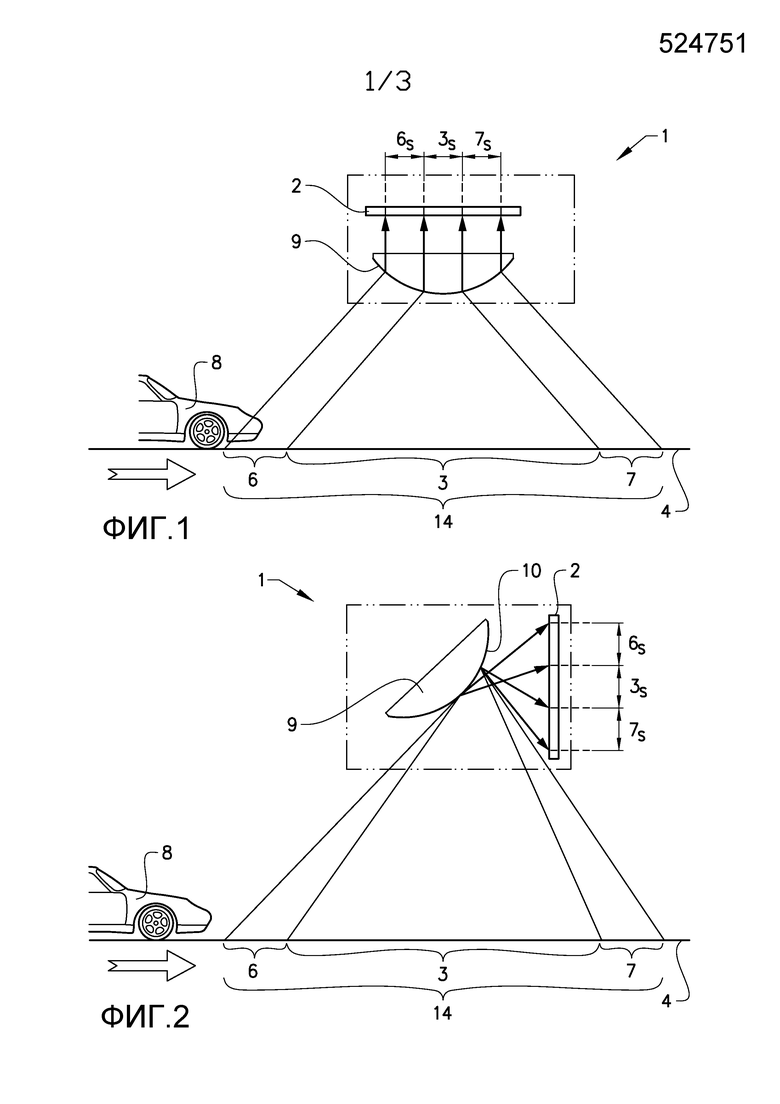
Фигура 1 показывает первый вариант воплощения устройства 1 для систем сбора дорожных пошлин или телематических систем, снабженных пиксельным датчиком 2 изображений. Фигура 1 дополнительно показывает контролируемую зону 14, предусмотренную на дороге 4. Устройство 1 предусмотрено на платформе (не показанной) на заранее заданном расстоянии над дорогой, чтобы плоскость контролируемой зоны 14 оказалась на одном уровне с поверхностью дороги 4. Удлиненная контролируемая зона 14 обладает протяженностью вдоль направления дороги 4. Датчик 2 изображения снабжен широкоугольной оптической системой 9. Оптическая система 9 обладает рефракцией и устанавливается относительно датчика 2 изображения таким образом, чтобы изображение, захватываемое датчиком 2 изображения, содержало первую и вторую концевые зоны 6, 7. Рефракция и отражение, обеспечиваемые оптической системой 9 на датчик 2 изображения, схематически показаны на Фигуре 1 и на Фигуре 2. Обрезка и измельчение, соответствующие оптической системе 9, определяющей рефракцию, не показаны.
На Фигуре 1 первое транспортное средство 8 входит в первую концевую зону 6. Передняя часть первого транспортного средства 8 захватывается на изображении датчиком 2 изображения, поскольку рефракция широкоугольной оптической системы 9 охватывает всю контролируемую зону 14. Если второе транспортное средство (не показано) выходит из контролируемой зоны 14, находясь в то же время во второй 7 концевой зоне, то задняя часть второго транспортного средства может быть захвачена датчиком изображения 2 на том же изображении. Первая и вторая концевые зоны 6, 7 в варианте воплощения, показанном на Фигуре 1, представляют собой области с высоким приоритетом.
Фигура 1 дополнительно показывает оптическую систему 9, установленную относительно датчика 2 изображения таким образом, чтобы разрешение было более высоким в части изображения, захватывающей первую 6 и вторую 7 концевые зоны, и более низким в части изображения, захватывающей зону между первой 6 и второй 7 концевыми зонами. Разрешение задается пиксельной плотностью датчика 2 изображения, а также рефракцией оптической системы 9. На Фигуре 1 оптическая система 9 проецирует единицу поверхности, представляющую 1/4 от контролируемой зоны 14, представленной первой и второй концевыми зонами 6, 7, на 2/3 пиксельной области датчика 2 изображения в устройстве 1, т.е. каждая концевая зона 6, 7 проецируется на каждую 1/3 датчика изображения. Первая концевая зона 6 проецируется на пиксельную область 6s датчика 2 изображения, а вторая концевая зона 7 проецируется на пиксельную область 7s датчика 2 изображения. Область 3 с низким приоритетом в варианте воплощения, показанном на Фигуре 1, находится посередине между первой и второй концевыми зонами 6, 7. Следовательно, для области 3 с низким приоритетом единица поверхности, представляющая 3/4 от контролируемой зоны 14, проецируется на 1/3 от пиксельной области, показанной как область 3s, датчика 2 изображения. Поэтому области с высоким приоритетом, меньшие, чем области с низким приоритетом, проецируются на сопоставимо более крупную пиксельную область и, следовательно, количество пикселей, представляющее области с высоким приоритетом, больше по сравнению с количеством пикселей, представляющим области с низким приоритетом. Разрешение областей с высоким приоритетом, т.е. первой и второй концевых зон 6, 7, таким образом, является высоким. Плотность пикселей в пиксельной области датчика 2 изображения, на которую проецируется область с высоким приоритетом, также может быть более высокой, что, таким образом, еще больше повышает разрешение.
Контролируемая зона 14 может быть разделена различным образом, вследствие чего соотношение между областью с высоким приоритетом и областью с низким приоритетом становится больше или меньше, и это соотношение между проекциями областей с высоким и низким приоритетом на датчике 2 изображения также является различным. Область с высоким приоритетом не обязательно должна соответствовать концевым зонам контролируемой зоны 14. Так же как и прежде, первая и вторая концевые зоны 6, 7 будут рассматриваться как эквивалентные общим областям с высоким приоритетом, а зона посередине между первой и второй концевой зоной, т.е. средняя зона 3, будет эквивалентна общим областям с низким приоритетом. Области с высоким и низким приоритетом могут быть предусмотрены где-либо в контролируемой зоне и/или иметь большую или меньшую величину без отступления от объема изобретения.
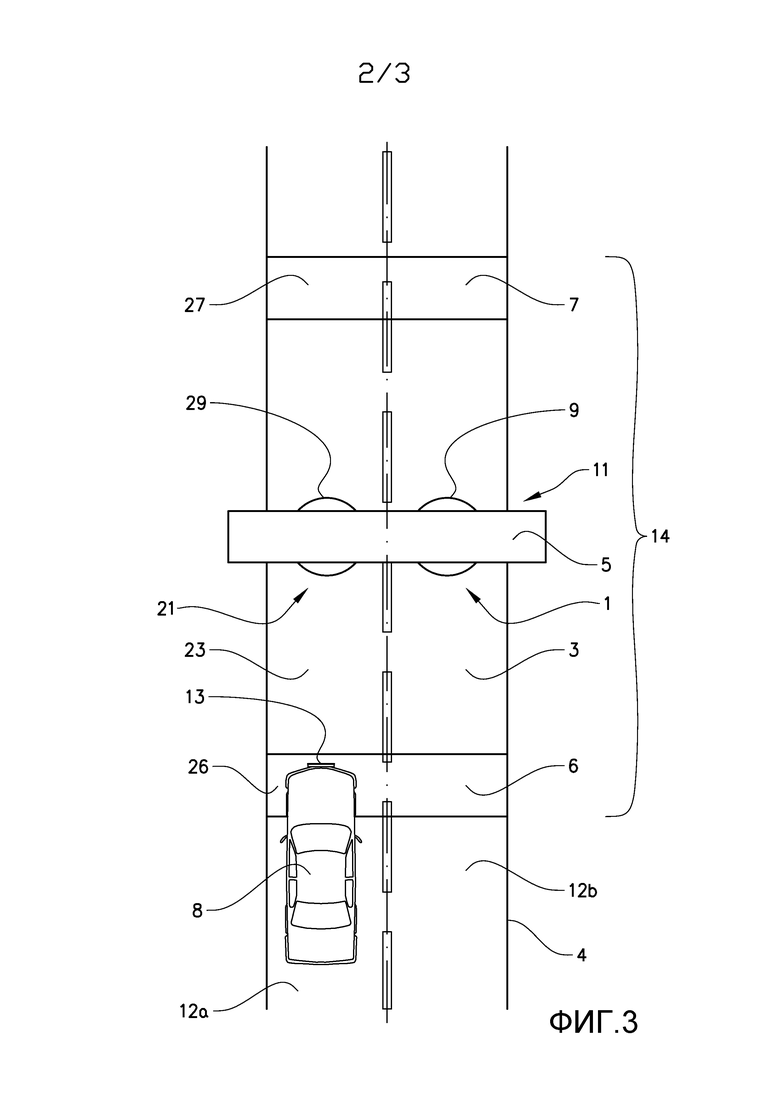
В другом варианте воплощения, показанном на Фигуре 2, оптическая система 9 содержит зеркало 10, установленное перед датчиком 2 изображения, вызывая рефракцию, вследствие чего контролируемая зона 14 захватывается на датчике 2 изображения. Вариант воплощения, представленный на Фигуре 2, отличается лишь в том, что оптическая система 9 является оптической системой другого рода, но ее функционирование и устройство как таковое является тем же, что и в варианте воплощения, представленном на Фигуре 1. Следовательно, как и на Фигуре 1, соотношение между областями первой 6 концевой зоны и второй 7 концевой зоны к контролируемой зоне 14 является меньшим, чем соотношение между двумя изображениями, спроецированными на датчике 2 изображения. Таким образом, первая и вторая концевая зона 6, 7 захватывается датчиком изображения 2 с большим количеством пикселей и, соответственно, при более высоком разрешении, чем средняя зона 3 контролируемой зоны 14. Зеркало также предусматривает иные соотношения, нежели представленные в Фигуре 2.
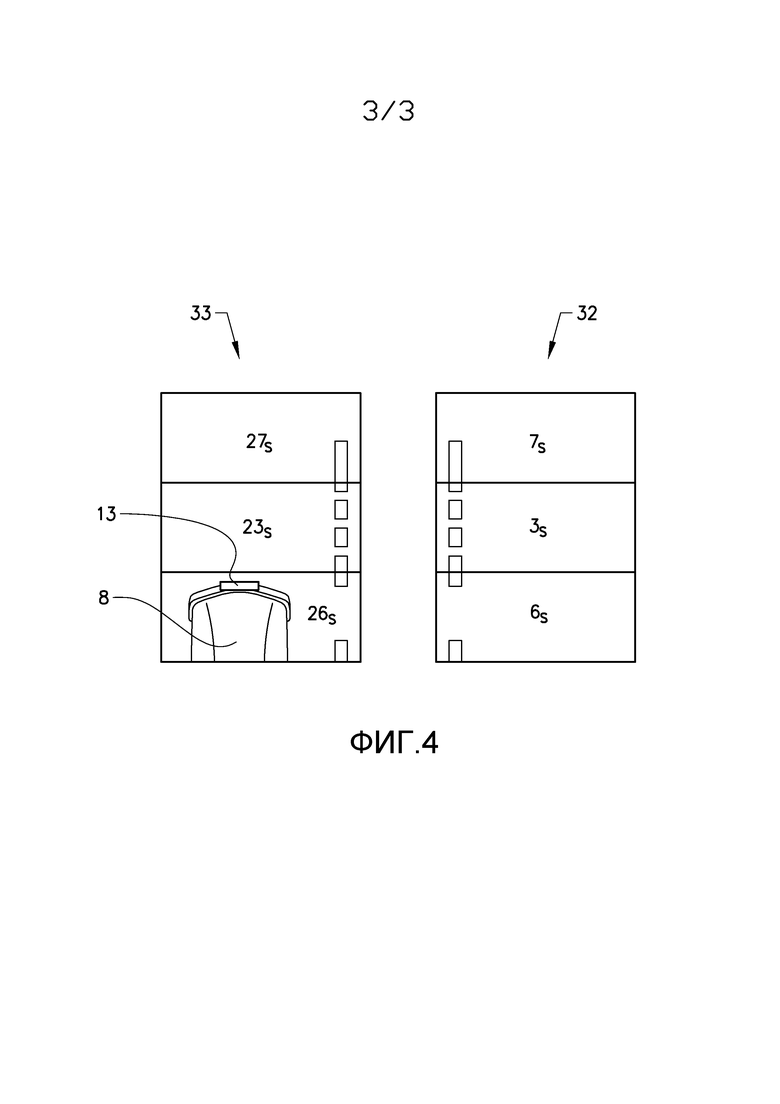
Фигура 3 показывает систему 11 устройств 1 согласно изобретению, снабженную пиксельным датчиком 2 изображения, не показанным на Фигуре 3. Система 11 устройств 1 имеет доступ к изображениям, захватываемым множеством устройств 1, 21. Таким образом, в варианте воплощения, показанном на Фигуре 3, система 11 устройств 1, 21 охватывает контролируемые зоны 14 полос 12a, 12b, предусмотренных на дороге 4. Система 11 комбинирует информацию, извлеченную из изображения, захватываемого датчиком изображения 2, соответствующего устройствам 1, 21, для отслеживания первого транспортного средства 8, в случае когда оно движется между контролируемыми зонами 14, соответствующими различным устройствам 1, 21 и датчикам изображения (не показанным на Фигуре 3). На Фигуре 3 каждый датчик 2 изображения, не показанный на Фигуре, снабжен индивидуальной оптической системой 9, и каждый из них захватывает контролируемую зону 14 одной отдельной полосы 12a, 12b. Контролируемые зоны 14, захватываемые отдельными устройствами 1, 21, расположенными рядом друг с другом, также могут перекрываться, в зависимости от характеристик отдельных оптических систем 9. В варианте воплощения, показанном на Фигуре 3, контролируемые зоны 14 имеют прямоугольную форму и могут перекрываться между полосами 12a, 12b, для управления транспортными средствами, которые проходят между полосами.
Система 11 устройств 1, 21 комбинирует информацию, поступающую от изображений, полученных различными датчиками изображения, для оценки высоты, длины и/или объема транспортного средства 8. Таким образом, транспортное средство 8 классифицируется и соответствующие дорожные пошлины взимаются исходя из типа транспортного средства - легкового автомобиля на Фигуре 3. Номерной знак 13 на передней части транспортного средства 8 также захватывается датчиком изображения 2 по мере того, как транспортное средство входит в первую концевую зону 26 полосы 12a. Таким образом, транспортное средство 8 может быть идентифицировано по номерному знаку 13. В качестве альтернативы, для идентификации автомобиля может быть использовано выявление по характерным признакам. В таком способе транспортное средство идентифицируют на основе вмятин, специфических болтов или других характеристик, отличных от номерного знака 13.
Фигура 4 показывает проекции оптических систем 9 на датчиках изображения (не показаны) от системы 11 устройств 1, 21, показанных на Фигуре 3. Два изображения 32, 33 на Фигуре 4 представляют выходные данные датчиков изображения, где проекции первых концевых зон 6, 26 захватываются в областях 6s, 26s изображений 32, 33, средние зоны 3, 23 с низким приоритетом захватываются в областях 3s, 23s, а вторая концевая зона 7, 27 захватывается в областях 7s, 27s. Как было разъяснено на Фигуре 4, средняя зона 3s, 23s, несмотря на то что это крупнейшая область контролируемой зоны, отображается на 1/3 изображения 32, 33. Первое транспортное средство 8 захватывается при высоком разрешении в пиксельной области 26s датчика изображения. Таким образом, номерной знак 13 также захватывается при высоком разрешении и может быть использован для идентификации первого транспортного средства 8. Перекрывание между двумя контролируемыми зонами, захватываемыми двумя датчиками изображения, показано на Фигуре 4. Таким образом, первое транспортное средство 8 может быть легко отслежено, даже если оно движется между двумя полосами 12a, 12b в ходе его прохождения через контролируемую зону.
Изобретение не ограничено конкретными представленными вариантами воплощения, но включает в себя все разновидности в рамках объема настоящей формулы изобретения.
Ссылочные обозначения, упомянутые в формуле изобретения, не следует рассматривать как ограничивающие объем изобретения, охраняемого формулой изобретения, и их единственная функция состоит в том, чтобы сделать формулу изобретения более легкой для понимания.
Как должно быть понятно, изобретение является пригодным для модифицирования в различных очевидных отношениях, отступления от объема прилагаемой формулы изобретения. Следовательно, чертежи и описание вдобавок следует рассматривать как иллюстративные по природе, а не ограничивающие.
Изобретение относится к устройствам оплаты проезда. Система для сбора дорожных пошлин содержит множество датчиков изображения. Датчики изображения приспособлены таким образом, чтобы они располагались посреди и на заранее определенном расстоянии над контролируемой зоной, предусмотренной на дороге. Контролируемая зона имеет протяженность вдоль направления дороги. Датчики изображения приспособлены таким образом, чтобы они располагались между первой и второй концевыми зонами зоны наблюдения, и снабжены широкоугольной оптической системой, которая обладает рефракцией и которая размещена относительно датчиков изображения таким образом, чтобы изображения, захватываемые датчиками изображения, содержали обе концевые зоны. Множество датчиков изображения непрерывно захватывают изображения зоны наблюдения, комбинируют информацию из изображений и сохраняют выходные данные. Выходные данные содержат, по меньшей мере, первое и второе изображения с одного датчика изображения. Первое изображение содержит характеристики передней части транспортного средства в первой концевой зоне, а второе изображение содержит характеристики задней части транспортного средства во второй концевой зоне. Достигается упрощение системы сбора дорожных пошлин. 2 н. и 9 з.п. ф-лы, 4 ил.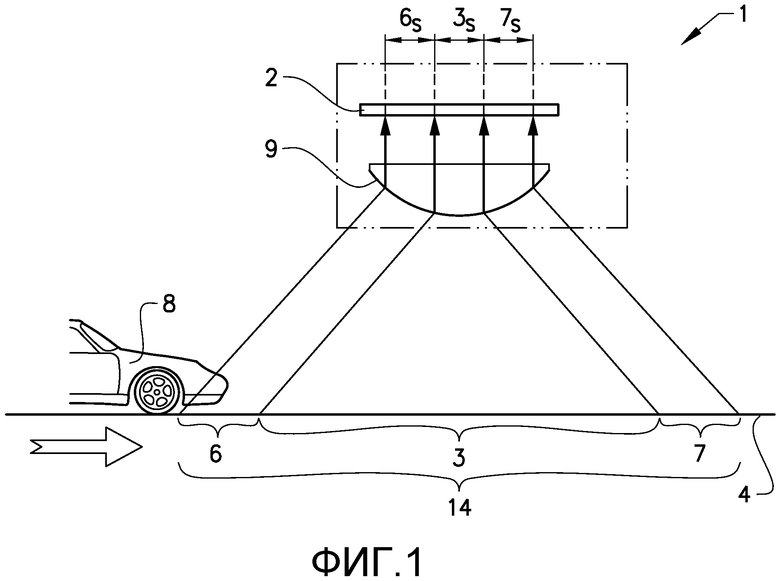
1. Способ управления системой для сбора дорожных пошлин, содержащей множество датчиков изображения, при этом датчики изображения приспособлены таким образом, чтобы они располагались посреди и на заранее определенном расстоянии над контролируемой зоной, предусмотренной на дороге, причем контролируемая зона имеет протяженность вдоль направления дороги, при этом датчики изображения приспособлены таким образом, чтобы они располагались между первой и второй концевыми зонами зоны наблюдения, причем датчики изображения снабжены широкоугольной оптической системой, которая обладает рефракцией и которая размещена относительно датчиков изображения таким образом, чтобы изображения, захватываемые датчиками изображения, содержали обе из первой и второй концевых зон, при этом упомянутое множество датчиков изображения:
непрерывно захватывают изображения зоны наблюдения;
комбинируют информацию из изображений, отснятых различными датчиками изображения из упомянутого множества датчиков изображения, для оценки по меньшей мере одного из высоты, длины и объема транспортного средства; и
сохраняют выходные данные из датчиков изображения,
причем эти выходные данные содержат, по меньшей мере, первое и второе изображения с одного датчика изображения из упомянутого множества датчиков изображения, при этом первое изображение содержит характеристики передней части транспортного средства в первой концевой зоне, а второе изображение содержит характеристики задней части транспортного средства во второй концевой зоне.
2. Способ по п.1, в котором датчики изображения являются пиксельными, а разброс в разрешении устанавливается варьируемой пиксельной плотностью датчиков изображения.
3. Способ по п.1, в котором оптическая система содержит по меньшей мере одно зеркало и/или линзу, расположенную перед датчиками изображения и вызывающую рефракцию.
4. Способ по п.1, в котором оптической системе придана форма, обеспечивающая прямоугольную контролируемую зону.
5. Способ по п. 1, в котором упомянутая система является частью или скомбинирована с датчиками, обеспечивающими стереоскопические и/или многомерные изображения, в которых могут быть выявлены типы транспортных средств и/или высоты транспортных средств.
6. Способ по п.1, в котором упомянутые выходные данные содержат третье изображение, причем третье изображение содержит транспортное средство между первой и второй концевыми зонами.
7. Способ по п.1, в котором упомянутые выходные данные состоят из одного составного изображения контролируемой зоны, при этом составное изображение составлено, по меньшей мере, из первого и второго изображений, захватываемых в различные моменты, так чтобы составное изображение раскрывало контролируемую зону и содержало, по меньшей мере, передний вид и задний вид транспортного средства соответственно в первой и второй концевых зонах.
8. Способ по п.7, в котором составное изображение дополнительно содержит третье изображение, захватываемое в третий момент, с тем чтобы вид транспортного средства, полученный, по существу, сверху и в зоне между первой и второй концевыми зонами, также содержался в составном изображении.
9. Способ по п. 1, в котором упомянутая система объединяется с другой технологией для идентификации транспортного средства, такой как радиочастотная идентификация.
10. Система для сбора дорожных пошлин, причем в данной системе предусмотрено множество датчиков изображения, при этом датчики изображения приспособлены таким образом, чтобы они располагались посреди и на заранее определенном расстоянии над контролируемой зоной, предусмотренной на дороге, причем контролируемая зона имеет протяженность вдоль направления дороги, при этом датчики изображения приспособлены таким образом, чтобы они располагались между первой и второй концевыми зонами зоны наблюдения, причем датчики изображения снабжены широкоугольной оптической системой, которая обладает рефракцией и которая размещена относительно датчиков изображения таким образом, чтобы изображения, захватываемые датчиками изображения, содержали обе из первой и второй концевых зон,
при этом упомянутая система выполнена с возможностью комбинировать информацию из изображений, отснятых различными датчиками изображения из упомянутого множества датчиков изображения, для оценки по меньшей мере одного из высоты, длины и объема транспортного средства,
при этом широкоугольная оптическая система выполнена с возможностью и размещена относительно упомянутого множества датчиков изображения таким образом, что первое разрешение первой части изображений, которые охватывают первую и вторую концевые зоны, выше, чем второе разрешение второй части изображений, которые охватывают зону между первой и второй концевыми зонами.
11. Система по п.10, при этом упомянутая система может комбинировать информацию, извлеченную из упомянутых изображений, для отслеживания транспортного средства, движущегося между контролируемыми зонами, соответствующими разным датчикам изображения из упомянутого множества датчиков изображений.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ЭЛЕКТРОННАЯ СИСТЕМА СБОРА ДОРОЖНОЙ ПОШЛИНЫ ДЛЯ ПУТЕЙ СООБЩЕНИЯ И СПОСОБ ЕЕ ФУНКЦИОНИРОВАНИЯ | 2005 |
|
RU2378700C2 |

