Область техники, к которой относится изобретение
Этот документ относится к способу и блоку управления в транспортном средстве, имеющем регулируемое устройство представления, предназначенное, чтобы отображать объекты за пределами непосредственного поля зрения водителя. Более конкретно, описывается способ и блок управления для уменьшения слепой зоны, создаваемой посредством регулировки поля обзора содержащегося в транспортном средстве устройства представления.
Уровень техники
Существуют зоны вокруг транспортного средства, которые являются невидимыми для водителя, ни посредством прямого обзора, ни опосредованно с помощью зеркала. Эти зоны иногда называются "слепыми зонами" водителя. Проблемы с видимостью являются, в частности, важными в тяжелых транспортных средствах, таких как грузовики, и, в частности, для грузовиков с прицепами вследствие длины снаряжения транспортного средства.
В этом случае существует риск аварии, если водитель транспортного средства меняет направление, когда объект находится в такой слепой зоне водителя.
Возможным решением для этой проблемы может быть перенаправление одного из зеркал заднего вида, с его направления по умолчанию, для того, чтобы отображать объект, который присутствует в такой слепой зоне зеркала. Однако, к несчастью, тогда создается новая слепая зона, которая может быть в равной степени опасной с точки зрения безопасности дорожного движения, что и первая слепая зона, которая была устранена посредством регулировки направления зеркала заднего вида. Таким образом, покрытие первой слепой зоны посредством регулировки зеркала заднего вида ведет к созданию второй слепой зоны этого зеркала заднего вида, и т.д.
Добавление дополнительных зеркал или добавление датчиков типа, например, камер, охватывающих слепые зоны, может решать или, по меньшей мере, уменьшать проблему. Однако, дополнительные зеркала и/или датчики являются дорогостоящими. Также их трудно устанавливать удобным образом и представлять информацию, касающуюся охвата слепой зоны, водителю удобным образом. Кроме того, дополнительные внешние зеркала транспортного средства будут добавлять воздушное сопротивление и, таким образом, также увеличивать расход топлива.
Другим известным решением является использование широкоугольных зеркал/камер, вместо или в дополнение к существующему зеркалу заднего вида. Таким образом, слепые зоны могут, по меньшей мере, частично быть охвачены, но к несчастью широкоугольные зеркала/камеры влияют на вид в перспективе. Объекты, находящиеся близко к широкоугольному зеркалу/камере, выглядят больше/ближе, чем они есть в реальности, в то время как объекты, находящиеся дальше, выглядят меньше/более отдаленно, чем они есть в реальности. Такой искаженный вид может путать или дезориентировать водителя, что может приводить к авариям вследствие несоответствующих реакций водителя на обнаруженные объекты.
Также известна замена традиционного зеркала транспортного средства камерой бокового вида и устройством представления, таким как дисплей. Преимуществом является то, что воздушное сопротивление может быть уменьшено. Однако, обсужденные выше проблемы со слепыми зонами не решаются посредством такой замены.
Напротив, такая камера бокового вида может выйти из строя, вследствие воздействия грязи, случайного повреждения или вандализма.
Документы US20120314075 и DE19816054 раскрывают системы в транспортных средствах, содержащие камеры бокового вида и камеры заднего вида, когда одна или более камер являются регулируемыми. Документ US20120133768 представляет систему, в которой угол обзора камеры заднего вида в транспортном средстве является регулируемым. Однако, ни один из этих документов не представляет решение проблемы избегания того, что сокрытие первой слепой зоны ведет к созданию другой слепой зоны. Ни один из этих документов не обсуждает взаимодействие между различными камерами в транспортном средстве с этой целью.
Оба документа US2014114534 и US2006066835 иллюстрируют системы в транспортных средствах, содержащие множество камер, заменяющих зеркала заднего вида. Камеры могут иметь узкий или широкий угол обзора. Ни один из этих документов, однако, не решает обсужденную выше проблему.
Таким образом, будет желательно улучшать зеркала заднего вида транспортных средств для того, чтобы уменьшать проблемы, ассоциированные со слепыми зонами.
Сущность изобретения
Следовательно, целью этого изобретения является решение, по меньшей мере, некоторых из вышеописанных проблем и улучшение безопасности дорожного движения.
Согласно первому аспекту изобретения эта цель достигается посредством способа в транспортном средстве для уменьшения слепой зоны, созданной посредством регулировки поля обзора содержащегося в транспортном средстве устройства представления, предназначенного для отображения объектов за пределами непосредственного поля зрения водителя. Способ содержит обнаружение слепой зоны устройства представления на основе сигналов, принимаемых от первого датчика, ассоциированного с устройством представления. Дополнительно, способ также содержит регулировку второго датчика, не ассоциированного с устройством представления, для того, чтобы охватывать, по меньшей мере, часть обнаруженной слепой зоны. Способ, кроме того, содержит вывод информации, захваченной посредством отрегулированного второго датчика.
Согласно второму аспекту изобретения эта цель достигается посредством блока управления в транспортном средстве. Блок управления нацелен на уменьшение слепой зоны, созданной посредством регулировки поля обзора содержащегося в транспортном средстве устройства представления, предназначенного, чтобы отображать объекты за пределами непосредственного поля зрения водителя. Блок управления конфигурируется, чтобы обнаруживать слепую зону устройства представления на основе сигналов, принимаемых от первого датчика, ассоциированного с устройством представления. Дополнительно, блок управления конфигурируется, чтобы формировать управляющие сигналы для регулировки второго датчика, не ассоциированного с устройством представления, для того, чтобы охватывать, по меньшей мере, часть обнаруженной слепой зоны. Кроме того, блок управления дополнительно конфигурируется, чтобы формировать управляющие сигналы относительно информации, захваченной посредством отрегулированного второго датчика.
Благодаря описанным аспектам, посредством охвата, по меньшей мере, части слепой зоны устройства представления, предназначенного, чтобы отображать объекты за пределами непосредственного поля зрения водителя, посредством регулировки другого датчика, такого как развернутый назад датчик или направленный вперед датчик, по меньшей мере, часть появившейся слепой зоны может быть охвачена. Посредством перенаправления или регулировки угла обзора вспомогательных датчиков, уже присутствующих в транспортном средстве для других целей, появившаяся слепая зона может быть, по меньшей мере, частично охвачена без потребности в дополнительных датчиках. Таким образом, проблемы слепых зон вокруг транспортного средства могут быть устранены или, по меньшей мере, уменьшены без увеличившихся расходов на датчики. Таким образом, достигается повышенная безопасность дорожного движения.
Другие преимущества и дополнительные новые признаки станут очевидны из последующего подробного описания.
Чертежи
Варианты осуществления изобретения будут сейчас описаны более подробно со ссылкой на сопровождающие чертежи, на которых:
Фиг. 1 иллюстрирует транспортное средство согласно варианту осуществления изобретения;
Фиг. 2A иллюстрирует пример сценария дорожного движения и варианта осуществления изобретения;
Фиг. 2B иллюстрирует пример сценария дорожного движения и варианта осуществления изобретения;
Фиг. 2C иллюстрирует пример сценария дорожного движения и варианта осуществления изобретения;
Фиг. 2D иллюстрирует пример сценария дорожного движения и варианта осуществления изобретения;
Фиг. 3 иллюстрирует пример салона транспортного средства согласно варианту осуществления;
Фиг. 4 - это блок-схема последовательности операций, иллюстрирующая вариант осуществления способа;
Фиг. 5 - это иллюстрация, изображающая систему согласно варианту осуществления.
Подробное описание изобретения
Варианты осуществления изобретения, описанные в данном документе, определяются как способ и блок управления, которые могут быть применены на практике в вариантах осуществления, описанных ниже. Эти варианты осуществления могут, однако, быть приведены в качестве примера и реализованы во многих различных формах и не должны ограничиваться примерами, изложенными в данном документе; скорее, эти иллюстративные примеры вариантов осуществления предоставляются таким образом, что это описание изобретения будет полным и законченным.
Также другие цели и признаки могут стать очевидными из последующего подробного описания, рассматриваемого в сочетании с сопровождающими чертежами. Следует понимать, однако, что чертежи представлены исключительно в целях иллюстрации, а не как определение ограничений, раскрытых в данном документе вариантов осуществления, для которых ссылка должна быть сделана только на прилагаемую формулу изобретения. Дополнительно, чертежи необязательно начерчены по масштабу, и, пока не указано иное, они просто предназначаются, чтобы концептуально иллюстрировать структуры и процедуры, описываемые в данном документе.
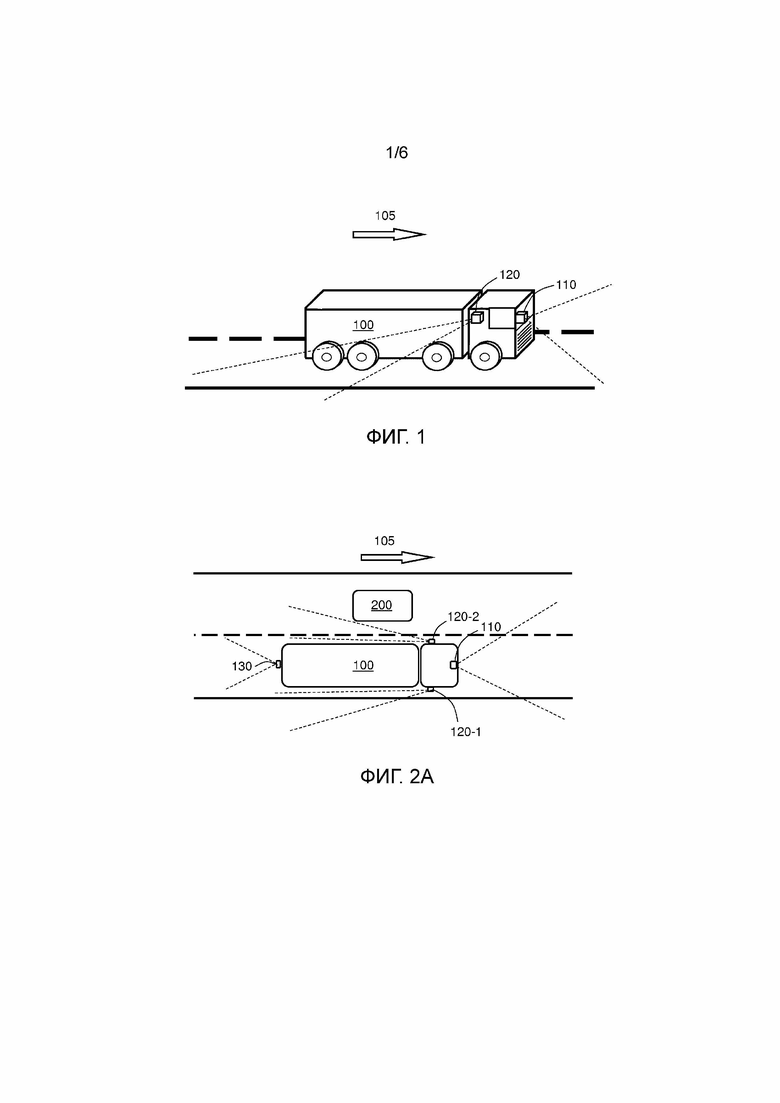
Фиг. 1 иллюстрирует сценарий с транспортным средством 100. Транспортное средство 100 едет по дороге в направлении 105 движения.
Транспортное средство 100 может содержать, например, грузовик, автобус или легковой автомобиль, или любое аналогичное транспортное средство или другое средство передвижения.
Дополнительно, транспортное средство 100 может содержать первый набор датчиков, содержащих один или более датчиков 120 бокового вида. Первый набор датчиков ассоциируется с соответствующим устройством представления. Датчик 120 бокового вида может быть расположен на боку транспортного средства 100, выполнен с возможностью обнаруживать объекты сбоку от транспортного средства 100. Датчик 120 бокового вида может содержать, например, камеру, стереокамеру, инфракрасную камеру, видеокамеру, радар, лидар, ультразвуковое устройство, времяпролетную камеру или аналогичные устройства в различных вариантах осуществления. Первый набор датчиков 120 может обычно использоваться во время передвижения транспортного средства 100, и использование может регулироваться правовыми ограничениями.
Транспортное средство 100 может также содержать второй набор датчиков, не ассоциированных с устройством представления. Второй набор датчиков может содержать, например, направленный вперед датчик 110 и/или развернутый назад датчик. В иллюстрированном варианте осуществления, который является просто произвольным примером, датчик 110 может быть расположен, например, в передней части транспортного средства 100, за ветровым стеклом транспортного средства 100. Преимущество размещения датчика 110 за ветровым стеклом заключается в том, что датчик 110 защищен от грязи, снега, дождя и до некоторой степени также от повреждения, вандализма и/или кражи.
Второй набор датчиков может быть дополнительным к требуемым по закону датчикам для помощи водителю, например, в отдельных ситуациях, например, при движении задним ходом и/или обнаружение полосы дороги.
Датчик 110 может быть направлен в переднюю сторону транспортного средства 100, в направлении 105 движения. Датчик 110 может содержать, например, камеру, стереокамеру, инфракрасную камеру, видеокамеру, радар, лидар, ультразвуковое устройство, времяпролетную камеру или аналогичные в различных вариантах осуществления.
В некоторых вариантах осуществления датчики 110, 120 могут содержать, например, датчик движения, и/или основываться на пассивном инфракрасном (PIR) датчике, чувствительном к температуре кожи человека посредством испускания излучения черного тела на длинах волн средней инфракрасной области спектра, в противоположность фоновым объектам при комнатной температуре; или посредством излучения непрерывной волны микроволнового излучения и обнаружения движения посредством принципа доплеровского радиолокатора; или посредством испускания ультразвуковой волны, обнаружения и анализа отражений; или посредством томографической системы обнаружения движения, основанной на обнаружении возмущений радиоволн, если упоминать некоторые возможные реализации.
Вместо использования традиционных зеркал заднего вида, содержащих отражающие элементы, в транспортном средстве 100, могут быть использованы датчики 120 бокового вида в сочетании с одним или более устройствами, предназначенными, чтобы отображать объекты за пределами непосредственного поля зрения водителя. Такое устройство представления может содержать, например, дисплей, проектор, индикатор на лобовом стекле, прозрачный дисплей, являющийся частью ветрового стекла, интеллектуальные очки водителя и т.д., которые выводят изображение, или поток изображений, захваченных соответствующим ассоциированным датчиком 120. Типично, датчик 120 бокового вида на левой стороне транспортного средства 100 может быть ассоциирован с устройством представления на левой стороне салона, в то время как датчик 120 бокового вида на правой стороне транспортного средства 100 может быть ассоциирован с устройством представления на правой стороне салона, даже если другие сочетания являются возможными.
Однако, такое устройство представления, предназначенное, чтобы отображать объекты за пределами непосредственного поля зрения водителя, могут в некоторых вариантах осуществления содержать отражающий элемент, такой как, например, представленный зеркалом (заднего вида).
Датчики 110, 120 могут быть повернуты и/или перенаправлены в различных направлениях, и устройства, предназначенные, чтобы отображать объекты за пределами непосредственного поля зрения водителя, могут представлять отрегулированный вид ассоциированного датчика 120.
Датчики 120 бокового вида могут согласно некоторым вариантам осуществления быть направлены на основе информации, захватываемой посредством датчиков 120, причем эта информация может быть проанализирована для определения того, как окружающие объекты движутся относительно транспортного средства 100. Таким образом, датчик 120 бокового вида может идентифицировать, например, приближается ли другое транспортное средство, чтобы исчезать в слепой зоне водителя, вокруг транспортного средства 100.
Таким образом, возможно использовать датчики 120 бокового вида/устройства представления с обычным углом обзора и, в таком случае, следить за обнаруженным и идентифицированным объектом, для минимизации или, по меньшей мере, уменьшения риска того, что водитель не обнаруживает другое транспортное средство. В некоторых альтернативных вариантах осуществления, например, при недостаточном изменении направления, угол обзора может быть изменен на более широкий угол.
Однако, когда датчик 120 бокового вида и соответствующее устройство представления регулируются, т.е. поворачиваются в другом направлении, чем предварительно определенное или направление по умолчанию, появляется новая слепая зона. Согласно некоторым вариантам осуществления другие датчики в транспортном средстве 100, не ассоциированные с устройством представления, могут быть использованы для охвата появившейся слепой зоны. Примером может быть перенаправление развернутого назад датчика при движении в направлении 105 движения или перенаправление переднего датчика 110 при движении в противоположном направлении. Альтернативно, угол обзора вспомогательного датчика может быть отрегулирован, типично расширен, для того, чтобы минимизировать или, по меньшей мере, уменьшать появившуюся слепую зону.
Для того, чтобы знать, насколько передний датчик 110 или развернутый назад датчик должен быть отрегулирован, физические расстояния между соответствующим датчиком и датчиком 120 бокового вида может быть необходимо измерять и сохранять в памяти. Альтернативно, когда изображения от соответствующих датчиков 110, 120 перекрывают друг друга, расстояние может быть вычислено также посредством узнавания скорости транспортного средства из спидометра транспортного средства и измерения времени, которое тратится для того, чтобы обнаруженный объект появился в пределах угла обзора двух датчиков 110, 120. В некоторых вариантах осуществления также скорость поворота вокруг вертикальной оси может быть использована при вычислении того, как транспортное средство 100 движется в боковом направлении.
Вышеобсужденный пример регулировки датчика 120 бокового вида/устройства представления для того, чтобы отслеживать объект, является просто произвольным примером того, как и почему слепая зона может быть создана посредством перенаправления датчика 120 бокового вида.
В некоторых вариантах осуществления направленный вперед датчик 110 и/или развернутый назад датчик могут быть использованы для замены датчика 120 бокового вида в случае неисправности датчика 120 бокового вида.
Таким образом, видимость водителем близкой окружающей обстановки транспортного средства 100 улучшается посредством регулировки других бортовых датчиков, которые могут уже существовать в транспортном средстве 100 для других целей, таких как направленный вперед датчик 110 и/или развернутый назад датчик. Безопасность дорожного движения, таким образом, улучшается, в то время как дополнительные затраты сохраняются небольшими.
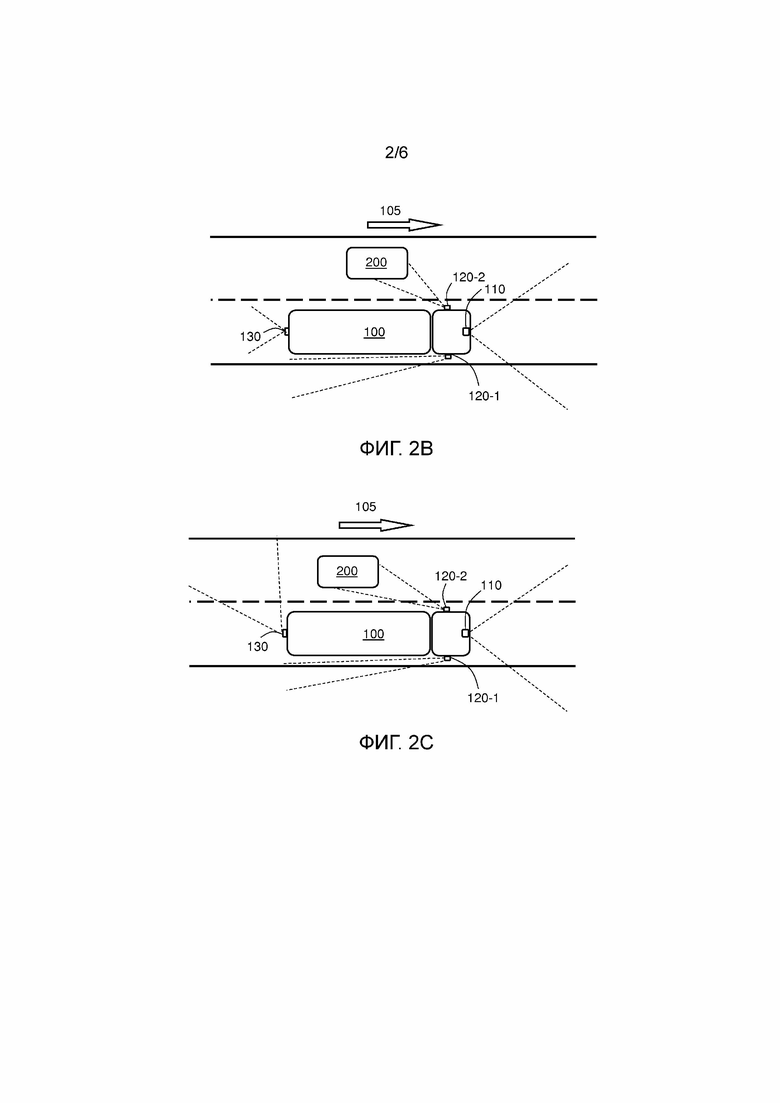
Фиг. 2A схематично иллюстрирует сценарий, аналогичный ранее обсужденному сценарию, иллюстрированному на фиг. 1, но с транспортным средством 100, рассматриваемым сверху, и при этом изображается объект 200.
Объект 200 может быть транспортным средством, человеком, животным, фонарным столбом или, например, любым другим представляемым объектом.
Когда транспортное средство 100 движется в направлении 105 движения, направленный вперед датчик 110 может обнаруживать объект 200 в этом иллюстрированном сценарии, когда транспортное средство 100 приближается к объекту 200 сзади. Программа распознавания изображений может распознавать объект 200 и категоризировать его, например, как пешехода, легковой автомобиль, велосипедист, животное, фонарный столб и т.д.; или в неподвижные/подвижные объекты 200, например, в некоторых вариантах осуществления.
Информация, касающаяся обнаруженного и возможно идентифицированного объекта 200, может затем быть использована, также, когда объект 200 больше не находится в диапазоне захвата направленного вперед датчика 110, согласно некоторым вариантам осуществления.
В других вариантах осуществления объект 200 может быть приближающимся к транспортному средству 100 сзади и обгоняющим транспортное средство 100. Развернутый назад датчик 130 может тогда быть использован для вышеописанного обнаружения и распознавания.
Поскольку транспортное средство 100 движется вперед в направлении 105 движения, объект 200 оказывается в слепой зоне, где его невозможно увидеть непосредственно ни водителю, ни посредством направленного вперед датчика 110, ни посредством направленного вбок датчика 120-2 и соответствующего устройства представления.
Можно отметить, что транспортное средство 100 может иметь дополнительные датчики, такие как камера 130 заднего вида, в некоторых вариантах осуществления, которые могут быть использованы для той же цели, что и направленный вперед датчик 110, при движении назад, в некоторых вариантах осуществления.
Фиг. 2B иллюстрирует момент времени после сценария, иллюстрированного на фиг. 2A.
Направленный вбок датчик 120-2 на левой стороне транспортного средства 100 в направлении движения 105 направленно регулируется, чтобы охватывать объект 200, который находился за пределами текущего или установленного по умолчанию поля обзора устройства, предназначенного, чтобы отображать объекты 200 за пределами непосредственного поля зрения водителя в сценарии 2A.
Обзор по умолчанию направленного вбок датчика 120-2 и соответствующее устройство могут быть в конфигурируемой позиции заднего вида.
Таким образом, обнаруженный объект 200 может быть отслежен посредством отрегулированного датчика 120-2, и представление обнаруженного объекта 200 может быть выведено посредством устройства представления, ассоциированного с датчиком 120-2.
Таким образом, водитель уведомляется об объекте 200 с левой стороны от его собственного транспортного средства 100, и ему предоставляется возможность продолжать движение с учетом этого транспортного средства. Сохраняя тот же угол обзора датчика 120-2 и устройства представления, оценка расстояния объекта 200 относительно собственного транспортного средства 100 облегчается для водителя.
Дополнительно, в некоторых вариантах осуществления, направленный вбок датчик 120-2 и соответствующее устройство могут возвращаться к полю обзора по умолчанию в некоторых вариантах осуществления, например, когда обнаруженный объект 200 больше не находится сбоку от транспортного средства 100, и/или когда другой объект входит в зону с левой стороны от транспортного средства 100.
Однако, когда направленный вбок датчик 120-2 перенаправляется, новая слепая зона появляется с левой стороны транспортного средства 100, в области, которая была охвачена направленным вбок датчиком 120-2 на фиг. 2A. Первое решение этой проблемы представляется на фиг. 2C, а альтернативное решение представляется на фиг. 2D.
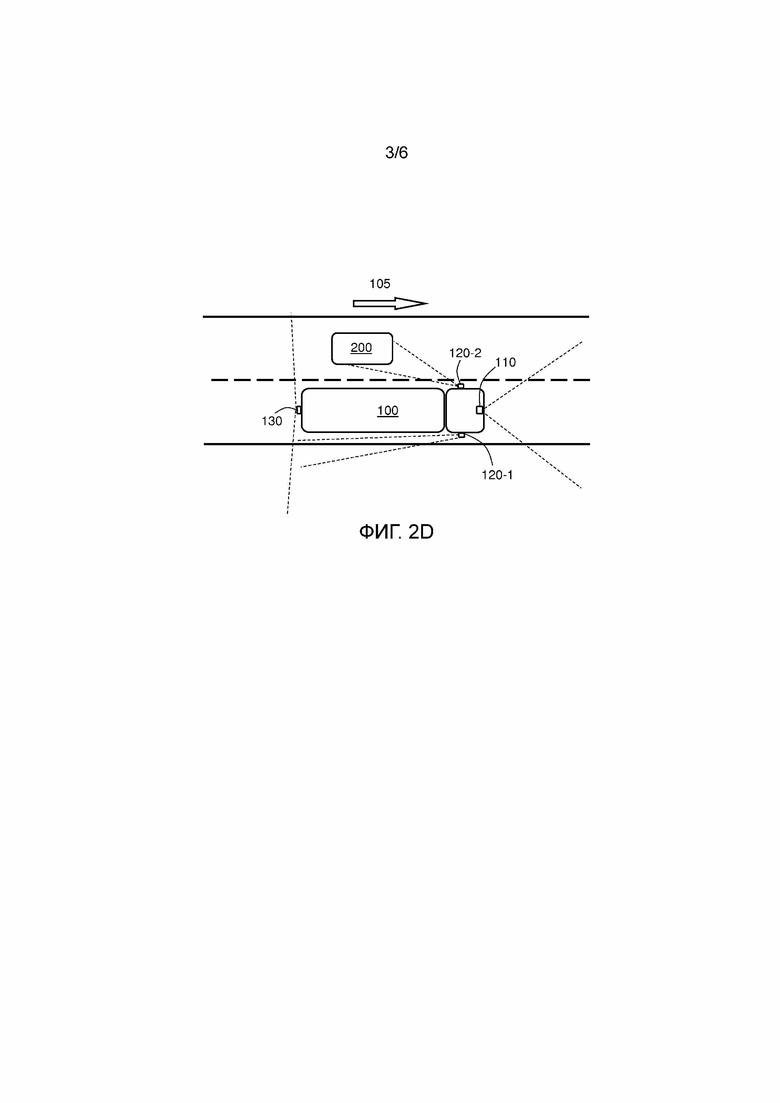
Фиг. 2C иллюстрирует момент времени после сценария, иллюстрированного на фиг. 2B.
Датчик 130 заднего вида был отрегулирован, чтобы охватывать левую сторону окружения транспортного средства. Таким образом, слепая зона, которая появилась, когда направленный вбок датчик 120-2 на левой стороне транспортного средства 100 был направлен, чтобы отслеживать транспортное средство 100, становится, по меньшей мере, частично охваченной датчиком 130 заднего вида.
В некоторых вариантах осуществления, когда транспортное средство 100 движется в обратном направлении, противоположном переднему направлению 105, направленный вперед датчик 110 может быть использован и направлен таким же образом.
В некоторых вариантах осуществления вспомогательный датчик 110, 130 может быть перенаправлен в направлении по умолчанию или предварительно определенном направлении, когда направленный вбок датчик 120-1, 120-2 перенаправляется в направлении по умолчанию или предварительно определенном направлении, например, когда обнаруженный объект 200 больше не находится сбоку от транспортного средства 100.
Фиг. 2D иллюстрирует момент времени после сценария, иллюстрированного на фиг. 2B, в котором представляется решение, альтернативное решению, иллюстрированному на фиг. 2C.
Направленный назад датчик 120-1 на правой стороне транспортного средства 100 регулируется, чтобы охватывать объект 200, который находился в слепой зоне в сценарии на фиг. 2B, посредством регулировки угла обзора.
Таким образом, слепая зона, которая появилась, когда направленный вбок датчик 120-2 на левой стороне транспортного средства 100 был направлен, чтобы следить за транспортным средством 100, становится, по меньшей мере, частично охваченной датчиком 130 заднего вида, в то же время избегая создания новой слепой зоны вследствие перенаправления датчика 130 заднего вида. Перспективный вид может отчасти быть ухудшенным, однако, обзор датчика 130 заднего вида не является настолько критичным для водителя при движении в направлении 105 движения, поскольку может быть более важным знать об объекте 200 сбоку от собственного транспортного средства 100, чем точное расстояние до объекта 200.
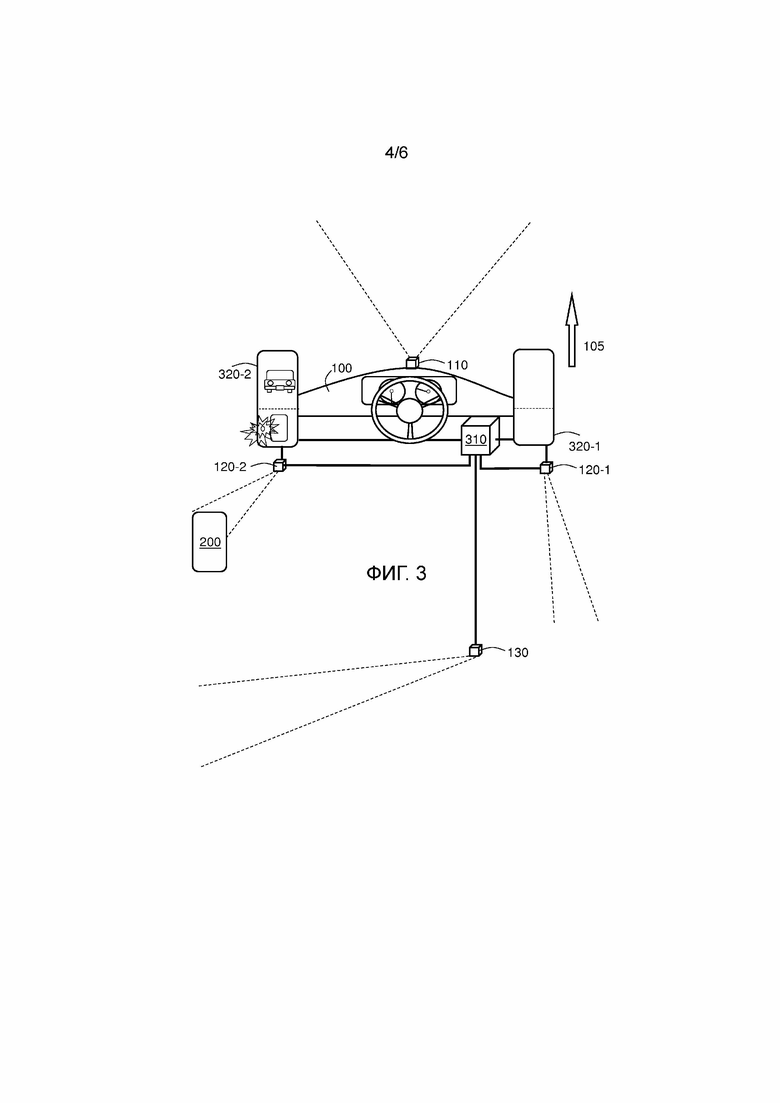
Фиг. 3 иллюстрирует пример салона транспортного средства для транспортного средства 100 и изображает, как предыдущий сценарий на фиг. 1 и/или фиг. 2A-2D может быть воспринят водителем транспортного средства 100.
Транспортное средство 100 содержит блок 310 управления, правостороннее устройство 310-1, предназначенное отображать объекты 200 за пределами непосредственного поля зрения водителя, находящиеся с правой стороны от транспортного средства 100, и левостороннее устройство 310-2, предназначенное отображать объекты 200 за пределами непосредственного поля зрения водителя, находящиеся с левой стороны транспортного средства 100. Каждое такое устройство 310-1, 310-2 ассоциируется с соответствующим датчиком 120-1, 120-2, находящимся на соответствующей стороне транспортного средства 100.
Датчики 120-1, 120-2 могут типично содержать соответствующую (видео) камеру. Однако, в других вариантах осуществления, транспортное средство 100 может содержать множество датчиков 120 на каждой стороне транспортного средства 100. Датчики 120 могут быть одинакового или различных типов, такими как, например, камера, стереокамера, инфракрасная камера, видеокамера, радар, лидар, ультразвуковое устройство, времяпролетная камера или аналогичное устройство в различных вариантах осуществления.
Устройства 310-1, 310-2 представления могут содержать дисплей, проектор, индикатор на лобовом стекле, прозрачный дисплей, являющийся частью ветрового стекла, интеллектуальные очки водителя и т.д., которые выводят изображение, или поток изображений, захваченных соответствующим датчиком 120-1, 120-2. Альтернативно, устройства 310-1, 310-2 представления могут содержать отражающий элемент или зеркало, такое как, например, зеркало заднего вида. Часть устройства 310-1, 310-2 представления может выводить изображение, представляющее обзор от другого датчика, такого как, например, датчик 130 заднего вида, направленный вперед датчик 110 или любой другой датчик. Альтернативно, в некоторых вариантах осуществления, может быть отображено общее представление транспортного средства 100, где информация, касающаяся окружающей обстановки транспортного средства 100, захваченная из различных датчиков 110, 120-1, 120-2, 130 на борту транспортного средства 100, отображается, как иллюстрировано на фиг. 3. Таким образом, внимание водителя привлекается к тому факту, что левое устройство 320-2 представления имеет скорректированную зону охвата, в сравнении с зоной охвата по умолчанию.
Блок 310 управления приспособлен обнаруживать объект 200, находящийся за пределами "обычного", установленного по умолчанию или используемого в настоящее время обзора в левом устройстве 320-2 представления, на основе сигналов датчика, предоставляемых левосторонним датчиком 120-2. Также, блок 310 управления дополнительно конфигурируется, чтобы формировать управляющие сигналы для отслеживания обнаруженного объекта 200 посредством регулирования датчика 120-2 и вывода представления обнаруженного объекта 200 упомянутым устройством 320-2. В иллюстрированном примере левосторонний датчик 120-2 перенаправляется с "обычной", или установленной по умолчанию, зоны охвата в зону, где находится объект 200. Вид перенаправленного датчика 120-2 затем отображается в левом устройстве 320-2 представления.
Это является просто иллюстративным неограничивающим примером перенаправленного направленного вбок датчика 120-1, 120-2 и соответствующего устройства 320-1, 320-2 представления. Решение для охвата, по меньшей мере, части слепой зоны может быть применено, когда направленный вбок датчик 120-1, 120-2 перенаправляется по какой-либо причине, или, например, когда направленный вбок датчик 120-1, 120-2 является неисправным.
Таким образом, посредством регулировки датчика 110, 130, отличного от датчика 120-2, ассоциированного с устройством 320-2 представления, риск аварии вследствие объекта 200, присутствующего в появившейся слепой зоне водителя, уменьшается, поскольку водитель уведомляется об объекте 200 и его позиции относительно собственного транспортного средства 100.
Блок 310 управления может связываться с датчиками 110, 120-1, 120-2, 130, например, по шине связи транспортного средства 100 или через проводное или беспроводное соединение.
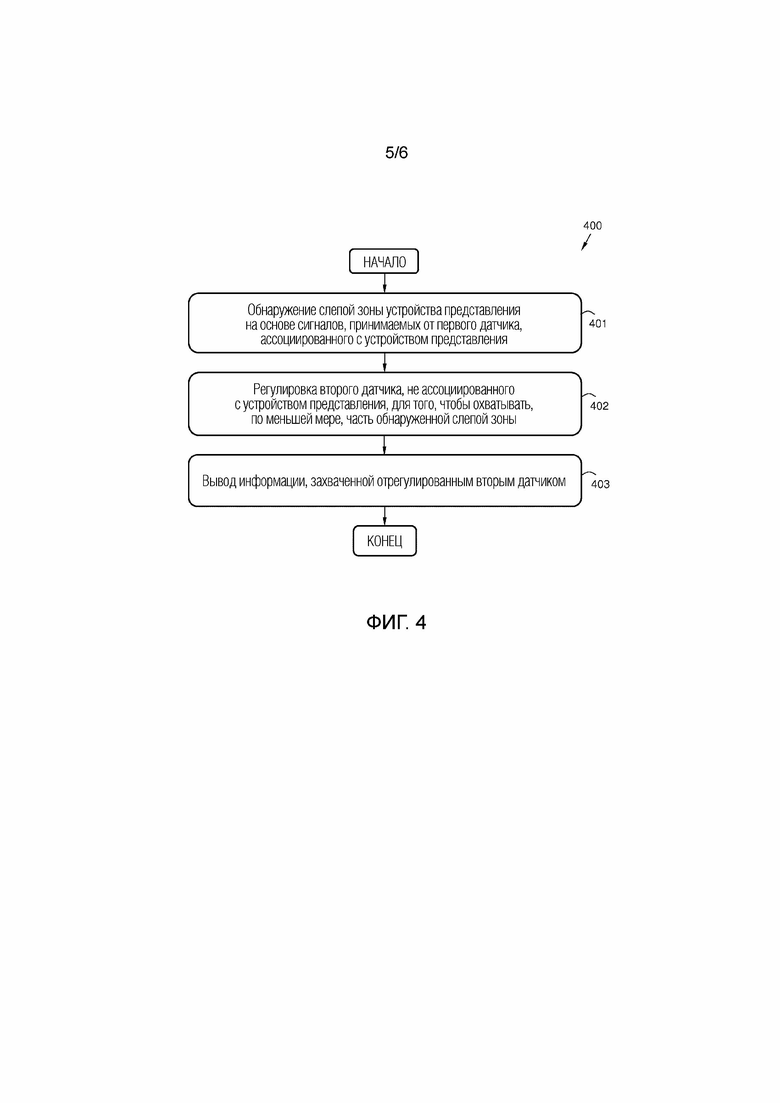
Фиг. 4 иллюстрирует пример способа 400 согласно варианту осуществления. Блок-схема последовательности операций на фиг. 4 показывает способ 400 для использования в транспортном средстве 100. Способ 400 нацелен на уменьшение слепой зоны, создаваемой посредством регулировки поля обзора содержащегося в транспортном средстве устройства 320-1, 320-2 представления, предназначенного, чтобы отображать объекты 200 за пределами непосредственного поля зрения водителя.
Транспортное средство 100 может быть, например, грузовиком, автобусом, легковым автомобилем или аналогичным средством передвижения.
Объект 200 может быть транспортным средством, человеком, животным, фонарным столбом или, например, любым другим представляемым объектом.
Транспортное средство 100 дополнительно содержит первый набор датчиков 120-1, 120-2, каждый ассоциирован с соответствующим устройством 320-1, 320-2 представления транспортного средства 100. Первый набор датчиков 120-1, 120-2 может быть отрегулирован посредством их поворота, например, на обнаруженный объект 200 для того, чтобы не изменять угол обзора, выводимый водителю. Дополнительно, транспортное средство 100 содержит второй набор датчиков 110, 130, такой как, например, направленный вперед датчик 110 и/или направленный назад датчик 130 и выполняет регулировки, поворачивая или регулируя угол обзора для того, чтобы уменьшать обнаруженную слепую зону.
Для того, чтобы иметь возможность корректно компенсировать появившуюся слепую зону вследствие перенаправления регулировки обзора, способ 400 может содержать ряд этапов 401-403. Некоторые из этих этапов 401-403 могут быть выполнены различными альтернативными образами. Дополнительно, описанные этапы 401-403 могут быть выполнены отчасти в отличном хронологическом порядке от того, что предлагает нумерация. Способ 400 может содержать следующие этапы:
Этап 401 содержит обнаружение слепой зоны устройства 320-1, 320-2 представления на основе сигналов, принимаемых от первого датчика 120-1, 120-2, ассоциированного с устройством 320-1, 320-2 представления.
Обнаруженная слепая зона может быть результатом перенаправления первого датчика 120-1, 120-2 по какой-либо произвольной причине или неисправности первого датчика 120-1, 120-2 в некоторых вариантах осуществления.
Этап 402 содержит регулирование второго датчика 110, 130, не ассоциированного с устройством 320-1, 320-2 представления, для того, чтобы охватывать, по меньшей мере, часть обнаруженной 401 слепой зоны.
Регулировка может быть выполнена посредством поворота второго датчика 110, 130 в зону, которая, по меньшей мере, частично перекрывает обнаруженную 401 слепую зону.
Однако, в некоторых вариантах осуществления, регулировка может быть выполнена посредством регулирования угла обзора второго датчика 110, 130, типично посредством расширения угла обзора второго датчика 110, 130.
Таким образом, появившаяся слепая зона первого датчика 120-1, 120-2 может быть, по меньшей мере, частично охвачена вторым датчиком 110, 130, который уменьшает риск наличия необнаруженного объекта 200 в окружении транспортного средства 100.
Этап 403 содержит вывод информации, захваченной посредством отрегулированного 402 второго датчика 110, 130.
В некоторых вариантах осуществления информация второго датчика 110, 130 может быть выведена посредством устройства 320-1, 320-2 представления, например, в специально выделенной части устройства 320-1, 320-2 представления. Однако, в других вариантах осуществления, информация может быть выведена в отдельном устройстве представления, таком как, например, дисплей.
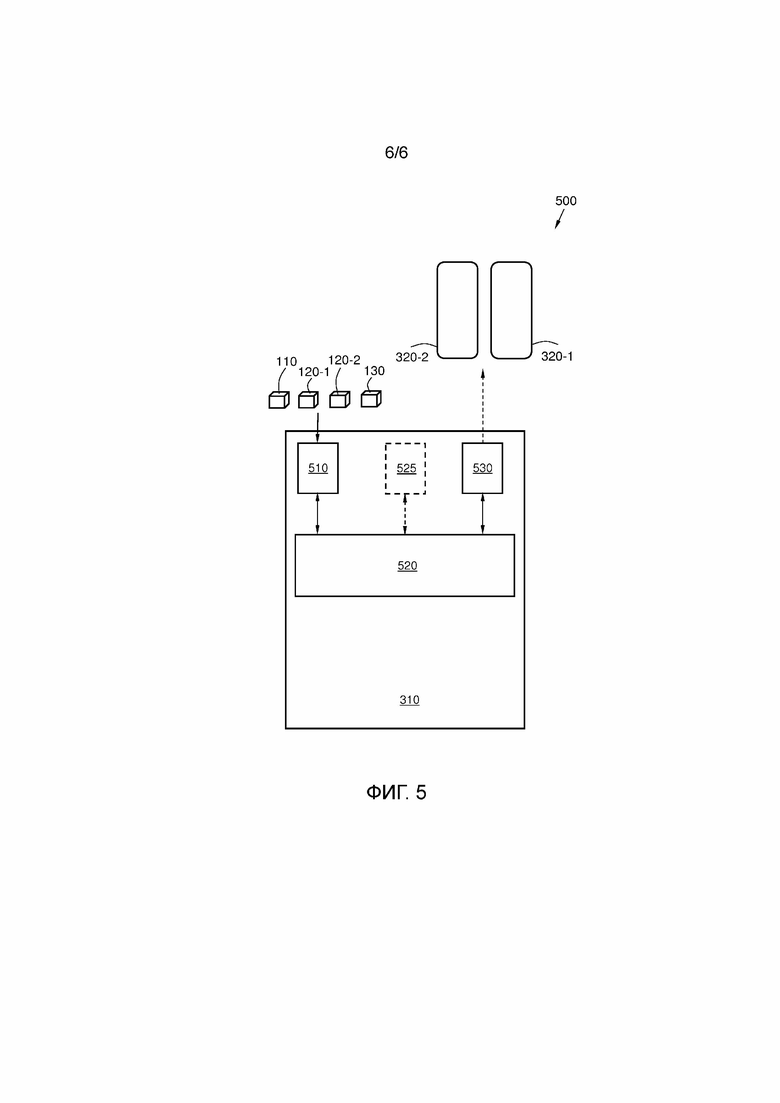
Фиг. 5 иллюстрирует вариант осуществления системы 500 для уменьшения слепой зоны, созданной посредством регулировки поля обзора содержащегося в транспортном средстве устройства 320-1, 320-2 представления, предназначенного, чтобы отображать объекты 200 за пределами непосредственного поля зрения водителя. Система 500 может выполнять, по меньшей мере, некоторые из ранее описанных этапов 401-403 согласно способу 400, описанному выше и иллюстрированному на фиг. 4.
Система 500 содержит, по меньшей мере, один блок 310 управления в транспортном средстве 100. Блок 310 управления выполнен с возможностью уменьшения слепой зоны, создаваемой посредством регулировки поля обзора содержащегося в транспортном средстве устройства 320-1, 320-2 представления, предназначенного, чтобы отображать объекты 200 за пределами непосредственного поля зрения водителя.
Блок 310 управления конфигурируется, чтобы обнаруживать слепую зону устройства 320-1, 320-2 представления на основе сигналов, принимаемых от первого датчика 120-1, 120-2, ассоциированного с устройством 320-1, 320-2 представления. Дополнительно, блок 310 управления конфигурируется, чтобы формировать управляющие сигналы для регулировки второго датчика 110, 130, не ассоциированного с устройством 320-1, 320-2 представления, для того, чтобы охватывать, по меньшей мере, часть обнаруженной слепой зоны. Кроме того, блок 310 управления конфигурируется, чтобы формировать управляющие сигналы для информации, захваченной посредством отрегулированного второго датчика 110, 130.
В некоторых вариантах осуществления блок 310 управления может быть сконфигурирован, чтобы формировать управляющие сигналы, чтобы регулировать второй датчик 110, 130 посредством поворота.
Альтернативно, в некоторых вариантах осуществления, формируются управляющие сигналы для регулировки второго датчика 110, 130 посредством регулирования угла обзора.
Кроме того, блок 310 управления может также быть сконфигурирован, чтобы формировать управляющие сигналы для регулировки какого-либо датчика 120-1, 120-2, ассоциированного с устройством 320-1, 320-2 представления транспортного средства 100 посредством поворота, для того, чтобы не изменять угол обзора, выводимого водителю. Блок 310 управления может также быть сконфигурирован, чтобы формировать управляющие сигналы для регулировки второго датчика 110, 130 посредством поворота или регулировки угла обзора для того, чтобы уменьшать обнаруженную слепую зону.
Блок 310 управления может содержать принимающую схему 510, сконфигурированную для приема сигнала от первого датчика 120-1, 120-2 и второго датчика 110, 130, например, по шине транспортного средства 100.
Дополнительно, блок 310 управления содержит процессор 520, сконфигурированный для выполнения, по меньшей мере, некоторых этапов способа 400, согласно некоторым вариантам осуществления.
Такой процессор 520 может содержать один или более экземпляров схемы обработки, т.е., центральный процессор (CPU), блок обработки, схему обработки, специализированную интегральную схему (ASIC), микропроцессор или другую логику обработки, которая может интерпретировать и исполнять инструкции. Используемое в данном документе выражение "процессор" может, таким образом, представлять схемы обработки, содержащие множество схем обработки, такие как, например, какие-либо, некоторые или все из схем, перечисленных выше.
Кроме того, блок 310 управления может содержать память 525 в некоторых вариантах осуществления. Необязательная память 525 может содержать физическое устройство, используемое для хранения данных или программ, т.е., последовательностей инструкций, на временной или постоянной основе. Согласно некоторым вариантам осуществления память 525 может содержать интегральные схемы, содержащие кремниевые транзисторы. Память 525 может содержать, например, карту памяти, флэш-память, USB-память, жесткий диск или другое аналогичное энергозависимое или энергонезависимое запоминающее устройство для хранения данных, такое как, например, ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство), EPROM (стираемое PROM), EEPROM (электрически стираемое PROM) и т.д. в различных вариантах осуществления.
Дополнительно, блок 310 управления может содержать передатчик 530 сигналов в некоторых вариантах осуществления. Передатчик 530 сигналов может быть сконфигурирован для передачи сигнала, например, устройству 320-1, 320-2 представления, или дисплею, например.
Кроме того, система 500 также содержит, по меньшей мере, один первый датчик 120-1, 120-2, ассоциированный с устройством 320-1, 320-2 представления. Типично, система 500 может содержать один правосторонний датчик 120-1, ассоциированный с правосторонним устройством 320-1 представления, и левосторонний датчик 120-2, ассоциированный с левосторонним устройством 320-2 представления.
Система 500 дополнительно содержит, по меньшей мере, один второй датчик 110, 130, не ассоциированный с устройством 320-1, 320-2 представления.
Датчики 110, 120-1, 120-2, 130 могут содержать, например, камеру, стереокамеру, инфракрасную камеру, видеокамеру или аналогичное устройство, как ранее приведено в качестве примера, одинакового или различных типов в различных вариантах осуществления.
Вышеописанные этапы 401-403, которые должны выполняться в транспортном средстве 100, могут быть реализованы посредством одного или более процессоров 520 блока 310 управления, вместе с компьютерным программным продуктом для выполнения, по меньшей мере, некоторых из функций этапов 401-403. Таким образом, компьютерный программный продукт, содержащий инструкции для выполнения этапов 401-403 в блоке 310 управления, может выполнять способ 400, содержащий, по меньшей мере, некоторые из этапов 401-403 для уменьшения слепой зоны, созданной посредством регулировки поля обзора содержащегося в транспортном средстве устройства 320-1, 320-2 представления, предназначенного, чтобы отображать объекты 200 за пределами непосредственного поля зрения водителя, когда компьютерный программный продукт загружается в один или более процессоров 520 блока 310 управления.
Дополнительно, некоторые варианты осуществления изобретения могут содержать транспортное средство 100, содержащее блоке 310 управления, сконфигурированный, чтобы уменьшать слепую зону согласно, по меньшей мере, некоторым из этапов 401-403.
Компьютерный программный продукт, упомянутый выше, может быть предоставлен, например, в форме носителя данных, несущего компьютерный программный код для выполнения, по меньшей мере, некоторых из этапов 401-403 согласно некоторым вариантам осуществления, когда загружается в один или более процессоров 520 блока 310 управления. Носитель данных может быть, например, жестким диском, диском CD-ROM, картой памяти, оптическим запоминающим устройством, магнитным запоминающим устройством или любым другим подходящим носителем, таким как диск или лента, который может хранить машиночитаемые данные энергонезависимым образом. Компьютерный программный продукт может, кроме того, быть предоставлен как компьютерный программный код на сервере и загружен в блок 310 управления удаленно, например, через Интернет или интранет-соединение.
Терминология, используемая в описании вариантов осуществления, которые иллюстрированы на сопровождающих чертежах, не предназначена быть ограничивающей описанный способ 400; блок 310 управления; компьютерную программу; систему 500 и/или транспортное средство 100. Различные изменения, замены и/или переделки могут быть выполнены без отступления от вариантов осуществления изобретения, которые определены посредством прилагаемой формулы изобретения.
При использовании в данном документе, термин "и/или" содержит все без исключения комбинации одного или нескольких ассоциированных перечисленных элементов. Термин "или", когда используется в данном документе, должен интерпретироваться как математическое ИЛИ, т.е., как неразделяющая дизъюнкция; не как математическое исключающее ИЛИ (XOR), пока явно не изложено иное. Кроме того, использование единственного числа не исключает множественного числа. Следует дополнительно понимать, что термины "включает в себя", содержит", "включающий в себя" и/или "содержащий" указывают наличие изложенных признаков, действий, целых частей, этапов, операций, элементов и/или компонентов, но не исключают заранее наличие или добавление одного или более других признаков, действий, целых частей, этапов, операций, элементов, компонентов и/или их групп. Отдельный блок, такой как, например, процессор, может удовлетворять функции нескольких элементов, перечисленных в формуле изобретения. Простой факт того, что определенные меры упомянуты в различных зависимых пунктах формулы изобретения, не означает того, чтобы комбинация этих мер не может быть использована с выгодой. Компьютерная программа может быть сохранена/распространяться на подходящем носителе, таком как оптический носитель хранения или твердотельный носитель, поставляемый вместе или как часть других аппаратных средств, но может также распространяться в других формах, например, через Интернет или другая проводная или беспроводная система связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И БЛОК УПРАВЛЕНИЯ ДЛЯ ЗАДНЕГО ОБЗОРА | 2017 |
|
RU2706757C1 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В СЛЕПОЙ ЗОНЕ | 2017 |
|
RU2686571C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | 2019 |
|
RU2769921C2 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
| ОБНАРУЖЕНИЕ ОБЪЕКТА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2699168C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829904C1 |
| Лидарные системы и способы | 2020 |
|
RU2798364C2 |
| СИСТЕМА И СПОСОБ ЗАПУСКА РАБОЧЕГО ТРАНСПОРТНОГО СРЕДСТВА С ВИРТУАЛЬНЫМ ОБЩИМ ОСМОТРОМ ДЛЯ АВТОРИЗАЦИИ ДИСТАНЦИОННОГО ЗАПУСКА | 2017 |
|
RU2671454C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СЛЕПОЙ ЗОНЫ ТРАНСПОРТНОГО СРЕДСТВА С БУКСИРУЕМЫМ ПРИЦЕПОМ И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2702291C2 |
| ОПОВЕЩЕНИЕ О ЗАБЫТОМ МОБИЛЬНОМ УСТРОЙСТВЕ | 2015 |
|
RU2704616C1 |
Группа изобретений к блоку управления в транспортном средстве. Блок управления в транспортном средстве для уменьшения слепой зоны, созданной посредством регулировки поля обзора содержащегося в транспортном средстве устройства представления, предназначенного, чтобы отображать объекты за пределами непосредственного поля зрения водителя. Блок управления конфигурируется, чтобы обнаруживать слепую зону устройства представления на основе сигналов, принимаемых от первого датчика, ассоциированного с устройством представления, формировать управляющие сигналы, чтобы регулировать второй датчик, не ассоциированный с устройством представления, для того, чтобы охватывать, по меньшей мере, часть обнаруженной слепой зоны и выводить сформированные управляющие сигналы относительно информации, захваченной отрегулированным вторым датчиком. Достигается возможность регулировки поля обзора зеркала заднего вида транспортного средства для уменьшения слепых зон. 4 н. и 6 з.п. ф-лы, 5 ил.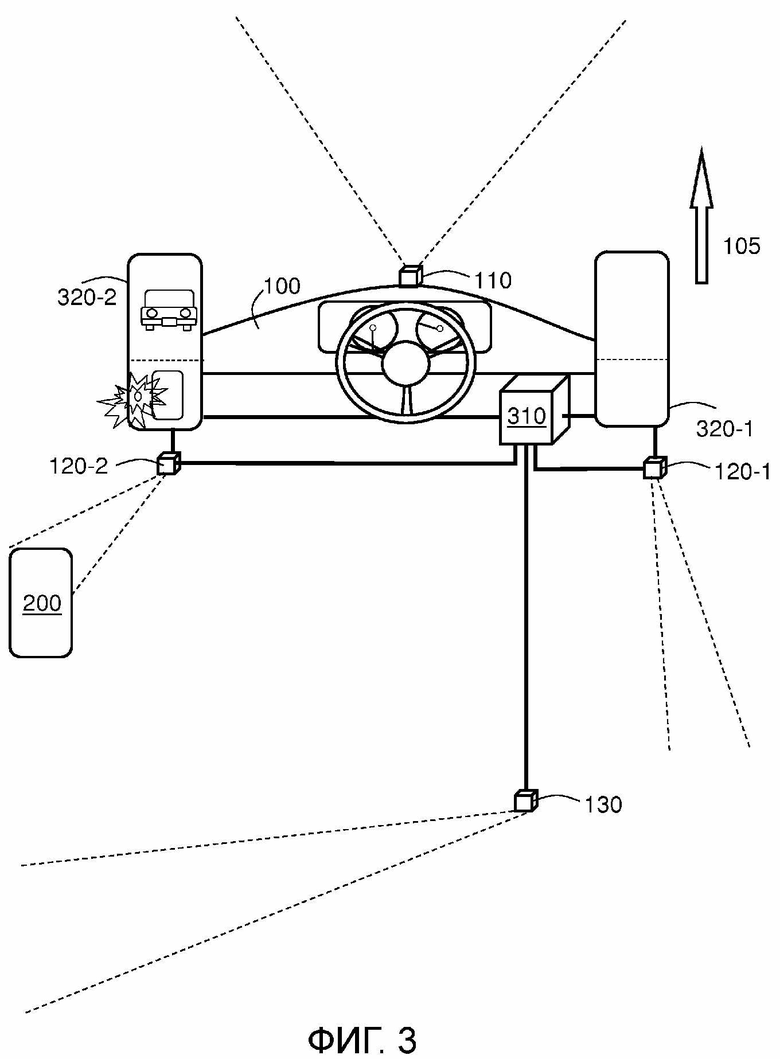
1. Способ (400) в транспортном средстве (100) для уменьшения слепой зоны, созданной посредством регулировки поля обзора содержащегося в транспортном средстве устройства (320-1, 320-2) представления, предназначенного, чтобы отображать объекты (200) за пределами непосредственного поля зрения водителя, причем этот способ (400) содержит этапы, на которых:
обнаруживают (401) слепую зону устройства (320-1, 320-2) представления на основе сигналов, принимаемых от первого датчика (120-1, 120-2), ассоциированного с устройством (320-1, 320-2) представления;
регулируют (402) второй датчик (110, 130), не ассоциированный с устройством (320-1, 320-2) представления, для того, чтобы охватывать, по меньшей мере, часть обнаруженной (401) слепой зоны; и
выводят (403) информацию, захваченную отрегулированным (402) вторым датчиком (110, 130).
2. Способ (400) по п. 1, в котором регулировка (402) выполняется посредством поворота второго датчика (110, 130).
3. Способ (400) по любому из пп. 1 или 2, в котором регулировка (402) выполняется посредством регулировки угла обзора второго датчика (110, 130).
4. Способ (400) по любому из пп. 1-3, в котором датчики (120-1, 120-2), ассоциированные с устройством (320-1, 320-2) представления транспортного средства (100), выполняют регулировки посредством поворота, для того, чтобы не изменять угол обзора, выводимый водителю, в то время как второй датчик (110, 130) выполняет регулировки посредством поворота или регулировки угла обзора для того, чтобы уменьшать обнаруженную (401) слепую зону.
5. Блок (310) управления в транспортном средстве (100) для уменьшения слепой зоны, созданной посредством регулировки поля обзора содержащегося в транспортном средстве устройства (320-1, 320-2) представления, предназначенного, чтобы отображать объекты (200) за пределами непосредственного поля зрения водителя, причем этот блок (310) управления конфигурируется, чтобы:
обнаруживать слепую зону устройства (320-1, 320-2) представления на основе сигналов, принимаемых от первого датчика (120-1, 120-2), ассоциированного с устройством (320-1, 320-2) представления;
формировать управляющие сигналы, чтобы регулировать второй датчик (110, 130), не ассоциированный с устройством (320-1, 320-2) представления, для того, чтобы охватывать, по меньшей мере, часть обнаруженной слепой зоны; и выводить сформированные управляющие сигналы относительно информации, захваченной отрегулированным вторым датчиком (110, 130).
6. Блок (310) управления по п. 5, дополнительно сконфигурированный, чтобы формировать управляющие сигналы, чтобы регулировать второй датчик (110, 130) посредством поворота.
7. Блок (310) управления по любому из пп. 5 или 6, дополнительно сконфигурированный, чтобы формировать управляющие сигналы, чтобы регулировать второй датчик (110, 130) посредством регулировки угла обзора.
8. Блок (310) управления по любому из пп. 5-7, дополнительно сконфигурированный, чтобы формировать управляющие сигналы для регулировки какого-либо датчика (120-1, 120-2), ассоциированного с устройством (320-1, 320-2) представления транспортного средства (100), посредством поворота для того, чтобы не изменять угол обзора, выводимый водителю; и
регулировать второй датчик (110, 130) посредством поворота или регулировки угла обзора для того, чтобы уменьшать обнаруженную слепую зону.
9. Носитель данных, содержащий программный код для выполнения способа (400) по любому из пп. 1-4, когда программный код выполняется в процессоре в блоке (310) управления по любому из пп. 5-8.
10. Система (500) в транспортном средстве (100) для уменьшения слепой зоны, созданной посредством регулировки поля обзора содержащегося в транспортном средстве устройства (320-1, 320-2) представления, предназначенного для того, чтобы отображать объекты (200) за пределами непосредственного поля зрения водителя, причем эта система (500) содержит:
блок (310) управления по пп. 5-8;
первый датчик (120-1, 120-2), ассоциированный с устройством (320-1, 320-2) представления; и
второй датчик (110, 130), не ассоциированный с устройством (320-1, 320-2) представления.
| US 2005012604 A1, 20.01.2005 | |||
| US 2014132770 A1, 15.05.2014 | |||
| ПРОИЗВОДНЫЕ БЕНЗИМИДАЗОЛА И СПОСОБ ИХ ПОЛУЧЕНИЯ | 1987 |
|
RU2062778C1 |
| US 2013063257 A1, 14.03.2013. | |||

