Изобретение относится к области торможения рельсовых транспортных средств.
В частности, оно относится к рельсовым системам торможения для рельсового транспортного средства, оснащенного рабочим тормозом и стояночным тормозом, выполненными с возможностью воздействия на систему тормозных рычагов.
Оно относится также к способам торможения рельсовых транспортных средств, содержащих такие системы торможения.
Как правило, рельсовые транспортные средства оснащены рабочими тормозными цилиндрами, содержащими поршень, перемещающийся под действием текучей среды под давлением, при этом перемещение этого поршня приводит к действию торможения, такому как сжатие тормозного диска между двумя накладками или прямое прижатие башмака к колесу транспортного средства.
Эти рабочие тормозные цилиндры, как правило, содержат также стояночный или аварийный привод, который активируют в случае падения давления текучей среды под давлением и/или в случае намеренного опорожнения или утечки в пневматической системе. Этот привод, называемый также стояночным тормозом, обеспечивает торможение, благодаря усилию пружины, которое заменяет усилие текучей среды. После активации этого стояночного тормоза, тормоз остается постоянно зажатым.
Из европейской патентной заявки ЕР 2 154 040 известна рельсовая система торможения, оснащенная приводом стояночного тормоза, соединенным с тормозным цилиндром рабочего тормоза. Этот тормозной цилиндр содержит корпус и поршень, подвижный относительно корпуса и выполненный с возможностью воздействия на систему рычагов через толкающий шток.
Тормозной цилиндр содержит также камеру давления, ограниченную поршнем и корпусом и соединенную через трубопровод с источником пневматического рабочего тела для перевода поршня в положение рабочего торможения.
Что касается стояночного тормоза, то он содержит корпус, отличный от корпуса тормозного цилиндра. Корпус стояночного тормоза имеет отверстие напротив поршня цилиндра рабочего тормоза, при этом в упомянутое отверстие заходит скольжением толкающая муфта, герметично подогнанная к этому отверстию.
Стояночный тормоз содержит также поршень, установленный подвижно в цилиндре, неподвижно соединенном с корпусом, и ограничивающий с корпусом камеру давления стояночного тормоза. Эта камера давления стояночного тормоза соединена с другим источником пневматического рабочего тела через трубопровод. Поршень содержит в своем центре отверстие, через которое проходит толкающая муфта.
Стояночный тормоз дополнительно содержит пружины, которые постоянно действуют на поршень этого стояночного тормоза в направлении так называемого нижнего положения, в котором стояночный тормоз считается в рабочем положении.
Для приведения в действие стояночного тормоза, когда поршень цилиндра рабочего тормоза находится в положении рабочего торможения, камеру давления стояночного тормоза (до этого заполненную пневматическим рабочим телом) опорожняют, и пружины стояночного тормоза действуют на поршень стояночного тормоза, перемещающий муфту, пока она не придет в положение опоры на поршень цилиндра рабочего тормоза.
При этом камеру давления рабочего тормозного цилиндра можно опорожнить, так как стояночный тормоз приведен в действие.
Сила, которой действует стояночный тормоз на поршень рабочего тормоза, напрямую зависит от силы, развиваемой пружинами. Разумеется, эта сила зависит от коэффициента упругости и от удлинения этих пружин.
При такой системе торможения усилие, прикладываемое поршнем рабочего тормозного цилиндра, когда стояночный тормоз приведен в действие и цилиндр рабочего тормоза опорожнен, на систему тормозных рычагов, часто меньше усилия, которым действует этот же поршень, когда он находится в положении рабочего торможения.
Изобретение относится к системе торможения для рельсового транспортного средства, имеющей улучшенные характеристики по сравнению с вышеупомянутыми известными системами торможения, будучи при этом простой, удобной и экономичной.
В связи с этим первым объектом изобретения является рельсовая система торможения для рельсового транспортного средства с тормозами по меньшей мере с одной накладкой или по меньшей мере с одним башмаком, содержащая:
- корпус;
- систему тормозных рычагов, выполненную с возможностью воздействия по меньшей мере на один упомянутый тормоз по меньшей мере с одной накладкой или по меньшей мере с одним башмаком;
- рабочий тормоз, содержащий тормозной поршень, подвижный относительно упомянутого корпуса для воздействия на упомянутую систему тормозных рычагов и ограничивающий вместе с упомянутым корпусом камеру давления рабочего тормоза, выполненную с возможностью питания от первого источника пневматического рабочего тела для перевода упомянутого тормозного поршня в положение рабочего торможения; и
- стояночный тормоз, выполненный с возможностью воздействия на упомянутый тормозной поршень упомянутого рабочего тормоза и с возможностью принимать рабочую конфигурацию и конфигурацию покоя;
при этом упомянутая рельсовая система торможения отличается тем, что упомянутый стояночный тормоз содержит:
- устройство блокировки, подвижное относительно упомянутого корпуса и занимающее первое положение и второе положение, в котором упомянутое устройство блокировки может заблокировать упомянутый тормозной поршень в положении рабочего торможения, при этом упомянутый стояночный тормоз находится в рабочей конфигурации;
- устройство управления, подвижное относительно упомянутого корпуса и занимающее положение блокировки, в котором упомянутое устройство управления удерживает упомянутое устройство блокировки в его втором положении;
при этом упомянутая рельсовая система торможения выполнена таким образом, чтобы, когда упомянутое устройство управления находится в своем положении блокировки, упомянутая камера давления рабочего тормоза получала питание от второго источника пневматического рабочего тела, значение давления которого определено таким образом, чтобы, когда упомянутый стояночный тормоз находится в рабочей конфигурации, действовать определенным усилием торможения;
при этом упомянутая рельсовая система торможения дополнительно содержит блок контроля и управления, выполненный с возможностью:
- получать информацию, характеризующую значение упомянутого первого источника пневматического рабочего тела;
- обрабатывать информацию, характеризующую заданное значение стояночного тормоза по меньшей мере в его рабочей конфигурации, с целью приведения в действие упомянутого подвижного устройства управления по меньшей мере в его положении блокировки; и
- определять значение упомянутого второго источника пневматического рабочего тела в зависимости от упомянутого заданного значения стояночного тормоза и от упомянутой информации, характеризующей значение упомянутого первого источника пневматического рабочего тела, с целью питания камеры давления рабочего тормоза.
В тормозной системе в соответствии с изобретением тормозной поршень блокируется в положении рабочего торможения стояночным тормозом и, в частности, его устройством блокировки. Это значит, что тормозной поршень может быть заблокирован в любом положении, при этом упомянутое положение связано с ходом, проходимым поршнем, и этот ход зависит от усилия, прикладываемого во время фазы рабочего торможения.
Термин «блокировать» означает, что усилие, прикладываемое тормозным поршнем к системе тормозных рычагов, в рабочей конфигурации стояночного тормоза не уменьшается или почти не уменьшается.
Однако все же допустима некоторая потеря, связанная с отдачей тормозного поршня, в частности, с легким перемещением поршня относительно устройства блокировки в момент, когда происходит опорожнение камеры давления рабочего тормоза. Эта потеря поддается контролю и определена очень незначительным уменьшением прикладываемого усилия, связанным, в частности, с допусками изготовления одновременно устройства блокировки и тормозного поршня. Это уменьшение усилия, действующего на систему тормозных рычагов, в данном случае называется потерями при отдаче. Допустимое максимальное значение этих потерь составляет от 10% до 15% усилия, прикладываемого рабочим тормозом, в момент, когда стояночный тормоз переводят в рабочую конфигурацию.
Благодаря изобретению и, в частности, конфигурации тормозного поршня и стояночного тормоза, можно отказаться от пружин описанных выше известных систем торможения, которые позволяют прикладывать усилие стояночного тормоза к системе тормозных рычагов через поршень цилиндра рабочего тормоза. Таким образом, при одном и том же усилии, действующем на систему тормозных рычагов, когда стояночный тормоз находится в рабочей конфигурации, заявленная система торможения является более компактной, чем вышеупомянутые известные системы торможения, а также более легкой.
Следует отметить, что предпочтительно система тормозных рычагов содержит деформирующиеся плечи, упругость которых можно заменять собой упругость пружин описанных выше известных систем торможения.
Можно отметить, что конфигурацию стояночного тормоза выбирают таким образом, чтобы сила, которой действует устройство блокировки напрямую для блокировки тормозного поршня, как правило, не превышает силу, которыми действуют пружины на поршень вышеупомянутых известных систем торможения; при этом усилие, прикладываемое к системе тормозных рычагов, когда стояночный тормоз заявленной системы находится в рабочей конфигурации, предпочтительно по меньшей мере равно и даже превышает усилие, создаваемое вышеупомянутыми известными системами торможения.
Благодаря своей конфигурации, система торможения в соответствии с изобретением позволяет также питать моментально камеру давления рабочего тормоза при помощи второго источника пневматического рабочего тела, чтобы увеличить усилие торможения, прикладываемого поршнем рабочего тормоза к системе тормозных рычагов. Следовательно, на столько же увеличивается и усилие торможения, действующее на систему тормозных рычагов, когда стояночный тормоз находится в своей рабочей конфигурации.
Таким образом, система в соответствии с изобретением позволяет получать усилия торможения рабочего тормоза и стояночного тормоза, превышающие усилия, получаемые в вышеупомянутых известных системах торможения, причем просто, удобно и экономично, оставаясь при этом исключительно надежной.
Кроме того, блок контроля и управления заявленной системы позволяет просто и удобно управлять по меньшей мере значением давления второго источника пневматического рабочего тела, который питает камеру давления рабочего тормоза, когда стояночный тормоз находится в своей рабочей конфигурации. В данном случае это значение давления определяют в зависимости от значения давления упомянутого первого источника пневматического рабочего тела, который служит для питания камеры рабочего тормоза, в частности, когда стояночный тормоз не находится в своей рабочей конфигурации, и в зависимости от заданного значения стояночного тормоза.
Следует отметить, что, как правило, первый источник пневматического рабочего тела позволяет питать, когда стояночный тормоз не находится в рабочей конфигурации, камеру давления рабочего тормоза, чтобы приложить усилие рабочего торможения в соответствии с заданным значением рабочего тормоза. Этот же первый источник пневматического рабочего тела может позволить также питать, когда стояночный тормоз не находится в рабочей конфигурации, камеру давления рабочего тормоза для приложения усилия экстренного, а не рабочего торможения в соответствии с заданным значением рабочего тормоза.
В данном случае, можно считать, что усилие экстренного торможения является усилием рабочего тормоза, измененным при помощи параметра экстренного торможения. Следовательно, используемые ниже определения, касающиеся значений и контрольных значений упомянутого первого источника пневматического рабочего тела, а также заданных значений рабочего тормоза, охватывают одновременно действия для приложения усилия рабочего торможения, как было описано выше, и действия для приложения экстренного торможения.
Согласно предпочтительным, простым, удобным и экономичным признакам системы в соответствии с изобретением:
- упомянутая информация, характеризующая упомянутое значение упомянутого первого источника пневматического рабочего тела, и упомянутая информация, характеризующая упомянутое заданное значение стояночного тормоза, соответствуют, каждая, электрическому или пневматическому или механическому сигналу;
- упомянутое устройство управления ограничивает вместе с упомянутым корпусом камеру давления стояночного тормоза, выполненную с возможностью получения питания от третьего источника пневматического рабочего тела, при этом упомянутый блок контроля и управления выполнен также с возможностью определения значения упомянутого третьего источника рабочего тела в зависимости от упомянутого заданного значения стояночного тормоза с целью приведения в действие упомянутого подвижного устройство управления по меньшей мере в его положении блокировки;
- упомянутое устройство управления выполнено с возможностью своего электрического приведения в действие, при этом упомянутый блок контроля и управления выполнен также с возможностью определения значения электрической энергии в зависимости от упомянутого заданного значения стояночного тормоза с целью приведения в действие упомянутого подвижного устройства управления по меньшей мере в его положении блокировки;
- упомянутое определенное значение давления упомянутого второго источника пневматического рабочего тела превышает, равно или меньше значения упомянутого первого источника пневматического рабочего тела, чтобы прикладывать, когда упомянутый стояночный тормоз находится в рабочей конфигурации, усилие торможения, соответственно превышающее, равное или меньшее усилия торможения, прикладываемого, когда упомянутый тормозной поршень находится в своем положении рабочего торможения и когда упомянутый стояночный тормоз находится в своей конфигурации покоя;
- упомянутый блок контроля и управления выполнен также с возможностью определения скорректированного значения упомянутого первого источника пневматического рабочего тела, и упомянутое определенное значение упомянутого второго источника пневматического рабочего тела равно упомянутому скорректированному значению;
- упомянутое определенное значение упомянутого второго источника пневматического рабочего тела является постоянным или меняется в зависимости от упомянутой полученной информации, характеризующей упомянутое значение упомянутого первого источника пневматического рабочего тела;
- упомянутый блок контроля и управления выполнен также с возможностью получать информацию, характеризующую заданное значение рабочего тормоза, и определять упомянутое заданное значение стояночного тормоза в зависимости от упомянутой полученной информации, характеризующей упомянутое заданное значение рабочего тормоза; и/или упомянутый блок контроля и управления выполнен с возможностью определения упомянутого заданного значения стояночного тормоза в зависимости от упомянутой информации, характеризующей упомянутое значение упомянутого первого источника пневматического рабочего тела, считая, что речь может идти непосредственно о значении давления упомянутого первого источника или о контрольном значении упомянутого первого источника;
- упомянутый блок контроля и управления выполнен также с возможностью получения по меньшей мере одной информации, характеризующей по меньшей мере один параметр использования упомянутого рельсового транспортного средства, и упомянутое значение упомянутого второго источника пневматического рабочего тела определяют также в зависимости от упомянутой по меньшей мере одной информации, характеризующей упомянутый по меньшей мере параметр использования упомянутого рельсового транспортного средства;
- упомянутый блок контроля и управления выполнен также с возможностью получения по меньшей мере одной информации, характеризующей по меньшей мере один параметр использования упомянутого рельсового транспортного средства, и определения упомянутого заданного значения стояночного тормоза в зависимости от упомянутой по меньшей мере одной информации, характеризующей упомянутый по меньшей мере один параметр использования упомянутого рельсового транспортного средства;
- упомянутый по меньшей мере один параметр использования упомянутого рельсового транспортного средства выбирают среди параметра тяги, параметра скорости, параметра нагрузки, параметра анти-заклинивания, параметра пневматического давления и параметра электрической энергии;
- упомянутый блок контроля и управления гидравлически сообщается с сетью пневматических трубопроводов, при этом упомянутая сеть содержит главный трубопровод и общий трубопровод, выполненные с возможностью транспортировки текучей среды по меньшей мере под первым заранее определенным давлением, факультативно первый вспомогательный резервуар, выполненный с возможностью хранения текучей среды под вторым заранее определенным давлением и соединенный с упомянутым главным трубопроводом, и/или факультативно второй вспомогательный резервуар, выполненный с возможностью хранения текучей среды под третьим заранее определенным давлением и соединенный с упомянутым главным трубопроводом;
- упомянутая сеть пневматических трубопроводов дополнительно содержит первый трубопровод питания, подсоединенный между упомянутым блоком контроля и управления и упомянутой камерой давления рабочего тормоза и выполненный с возможностью транспортировки текучей среды под давлением, поступающей по меньшей мере из одного среди первого и второго источников пневматического рабочего тела;
- упомянутая сеть пневматических трубопроводов дополнительно содержит второй трубопровод питания, подсоединенный между упомянутым блоком контроля и управления и упомянутой камерой давления стояночного тормоза и выполненный с возможностью транспортировки текучей среды под давлением, поступающей из третьего источника пневматического рабочего тела;
- упомянутая сеть пневматических трубопроводов дополнительно содержит специальный промежуточный трубопровод, выполненный с возможностью транспортировки только текучей среды, поступающей из упомянутого второго источника пневматического рабочего тела, когда упомянутый стояночный тормоз находится в рабочей конфигурации, в упомянутую камеру давления рабочего тормоза;
- упомянутый блок контроля и управления выполнен с возможностью питания упомянутой камеры давления рабочего тормоза через упомянутый специальный промежуточный трубопровод в обход упомянутого первого трубопровода питания;
- упомянутый блок контроля и управления содержит релейное устройство, выполненное с возможностью получать, на входе упомянутого релейного устройства, контрольное значение упомянутого первого источника пневматического рабочего тела и с возможностью генерировать и выдавать, на выходе упомянутого релейного устройства, упомянутое значение упомянутого первого источника пневматического рабочего тела; и упомянутый блок контроля и управления выполнен также с возможностью получать, на выходе упомянутого релейного устройства, промежуточное значение упомянутого второго источника пневматического рабочего тела, которое заменяет или добавляется к упомянутому значению упомянутого первого источника пневматического рабочего тела для генерирования упомянутого определенного значения упомянутого второго источника пневматического рабочего тела;
- упомянутый блок контроля и управления содержит релейное устройство, выполненное с возможностью получать, на входе упомянутого релейного устройства, контрольное значение упомянутого первого источника пневматического рабочего тела и контрольное значение упомянутого второго источника пневматического рабочего тела, которое заменяет или добавляется к упомянутому контрольному значению упомянутого первого источника пневматического рабочего тела, и с возможностью генерировать и выдавать, на выходе упомянутого релейного устройства, упомянутое определенное значение упомянутого второго источника пневматического рабочего тела;
- упомянутый блок контроля и управления содержит релейное устройство, выполненное с возможностью:
- получать на входе упомянутого релейного устройства контрольное значение упомянутого первого источника пневматического рабочего тела;
- получать в упомянутом релейном устройстве промежуточное значение или контрольное значение упомянутого второго источника пневматического рабочего тела; и
- генерировать и выдавать на выходе упомянутого релейного устройства упомянутое определенное значение упомянутого второго источника пневматического рабочего тела;
- упомянутый блок контроля и управления содержит устройство анти-заклинивания и выполнен с возможностью генерировать упомянутое определенное значение упомянутого второго источника пневматического рабочего тела на основании упомянутого значения упомянутого первого источника пневматического рабочего тела и промежуточного значения упомянутого второго источника пневматического рабочего тела, которое заменяет или добавляется к упомянутому значению упомянутого первого источника пневматического рабочего тела; либо на выходе, либо на входе упомянутого источника анти-заклинивания;
- упомянутый блок контроля и управления дополнительно содержит устройство генерирования значения упомянутого первого источника пневматического рабочего тела, выполненное с возможностью получать на входе упомянутого устройства генерирования заданное значение рабочего тормоза и генерировать и выдавать на выходе упомянутого устройства генерирования упомянутое значение упомянутого первого источника пневматического рабочего тела; и упомянутый блок контроля и управления выполнен также с возможностью получать на выходе упомянутого устройства генерирования промежуточное значение упомянутого второго источника пневматического рабочего тела, которое заменяет или добавляется к упомянутому значению упомянутого первого источника пневматического рабочего тела для генерирования упомянутого определенного значения упомянутого второго источника пневматического рабочего тела;
- упомянутый блок контроля и управления содержит устройство генерирования значения упомянутого первого источника пневматического рабочего тела, выполненное с возможностью получать на входе упомянутого устройства генерирования заданное значение рабочего тормоза и заданное значение стояночного тормоза, которое заменяет или добавляется к упомянутому заданному значению рабочего тормоза, и с возможностью генерировать и выдавать на выходе упомянутого устройства генерирования упомянутое определенное значение упомянутого второго источника пневматического рабочего тела; и/или
- упомянутый блок контроля и управления содержит устройство генерирования значения упомянутого первого источника пневматического рабочего тела, выполненное с возможностью:
- получать на входе упомянутого устройства генерирования заданное значение рабочего тормоза;
- получать в упомянутом устройстве генерирования заданное значение стояночного тормоза или промежуточное значение упомянутого второго источника пневматического рабочего тела; и
- генерировать и выдавать на выходе упомянутого устройства генерирования упомянутое определенное значение упомянутого второго источника пневматического рабочего тела; и/или
- упомянутый блок контроля и управления выполнен также с возможностью получать по меньшей мере одну информацию, характеризующую параметр нагрузки упомянутого транспортного средства; определять параметр условной нагрузки упомянутого транспортного средства в зависимости от упомянутого заданного значения стояночного тормоза и/или от упомянутого определенного значения упомянутого второго источника пневматического рабочего тела; и заменять упомянутый полученный параметр нагрузки упомянутым определенным параметром условной нагрузки.
Вторым объектом изобретения является способ торможения рельсового транспортного средства, содержащего описанную выше рельсовую систему торможения, содержащий:
- этап получения информации, характеризующей значение упомянутого первого источника пневматического рабочего тела;
- этап питания камеры давления рабочего тормоза упомянутой системы с упомянутым значением упомянутого первого источника пневматического рабочего тела таким образом, чтобы перевести упомянутый тормозной поршень в положение рабочего торможения;
- этап обработки информации, характеризующей заданное значение стояночного тормоза по меньшей мере в его рабочей конфигурации;
- этап приведения в действие упомянутого подвижного устройства управления по меньшей мере в его положении блокировки зависимости от упомянутого заданного значения стояночного тормоза; и
- этап определения значения упомянутого второго источника пневматического рабочего тела в зависимости от упомянутого заданного значения стояночного тормоза и от упомянутой информации, характеризующей значение упомянутого первого источника пневматического рабочего тела с целью питания упомянутой камеры давления рабочего тормоза.
Способ в соответствии с изобретением является исключительно простым и удобным в применении.
Согласно простым, удобным и экономичным предпочтительным отличительным признакам, заявленный способ дополнительно содержит этап питания упомянутой камеры давления рабочего тормоза с упомянутым значением упомянутого второго источника пневматического рабочего тела; и этап опорожнения упомянутой камеры давления рабочего тормоза.
Далее описание изобретения будет представлено на иллюстративных и не ограничительных примерах выполнения со ссылками на прилагаемые чертежи, на которых:
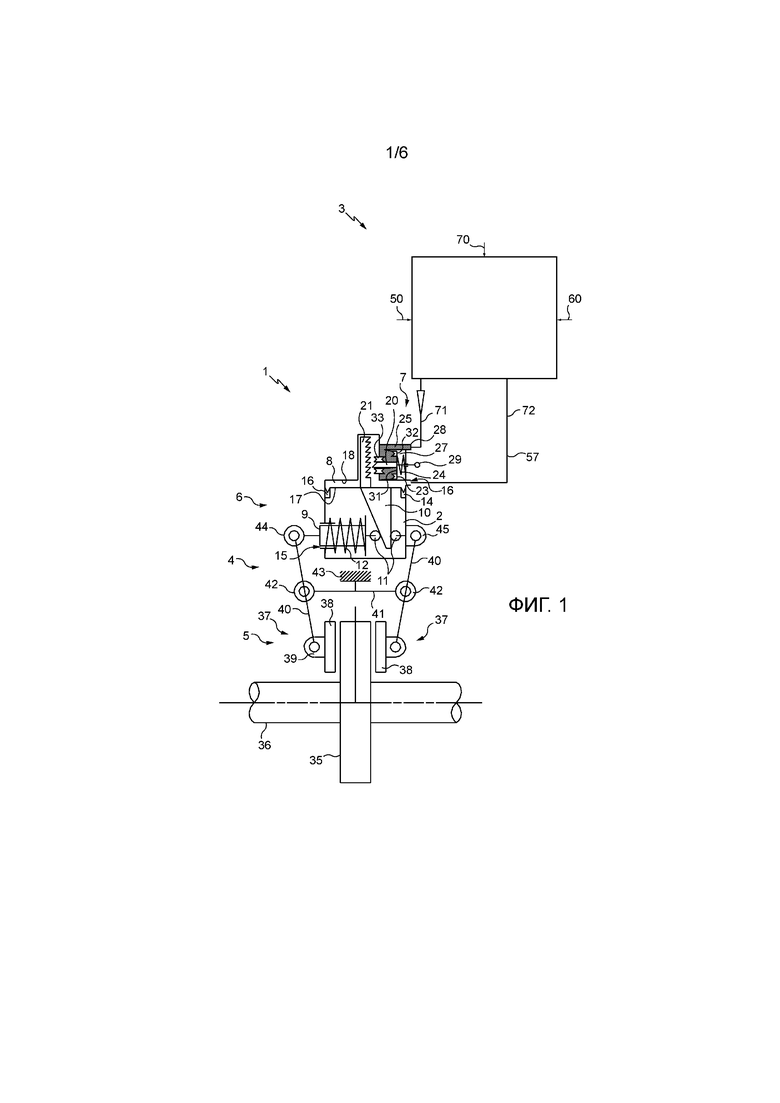
Фиг. 1 - схематичный частичный вид рельсовой системы торможения согласно первому варианту выполнения изобретения, при этом система оснащена блоком контроля и управления.
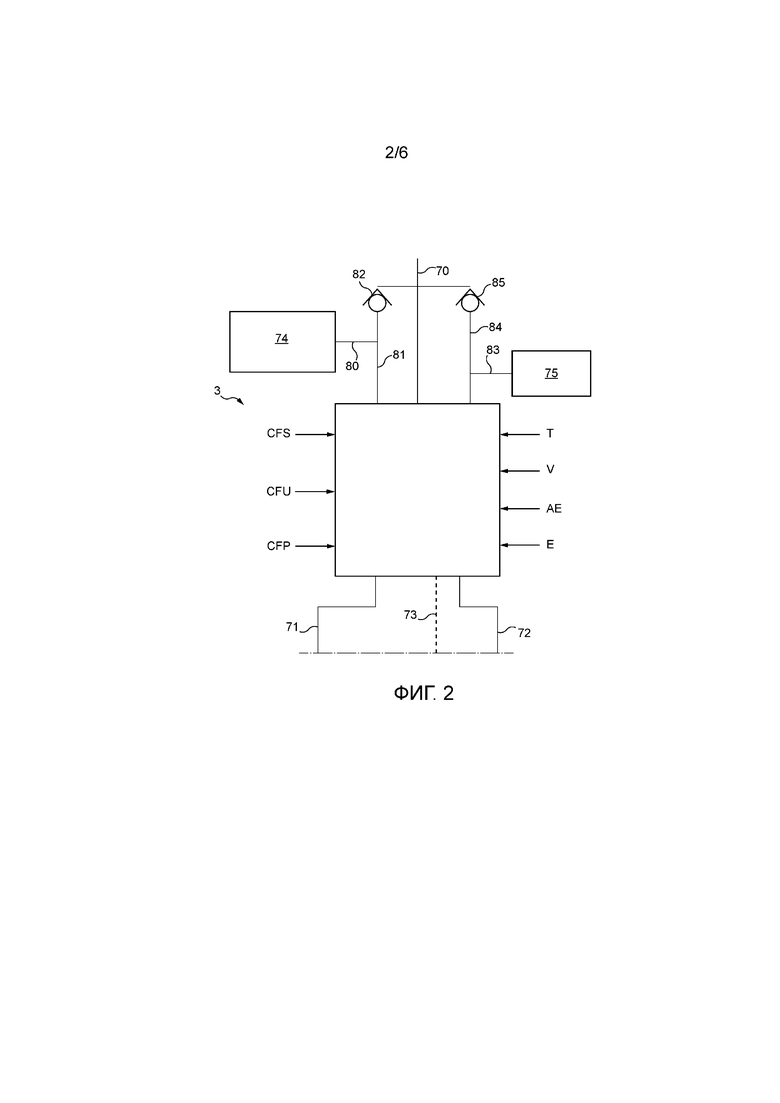
Фиг. 2 - схема блока контроля и управления и сети трубопроводов системы, соединенной с этим блоком.
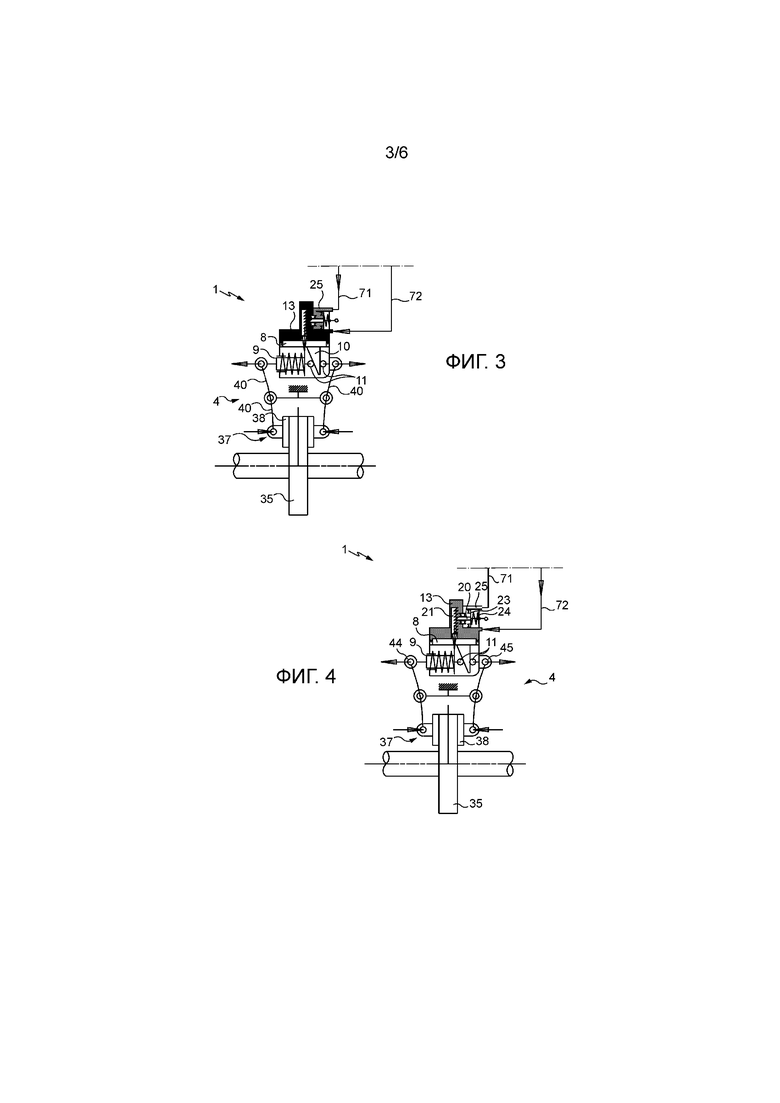
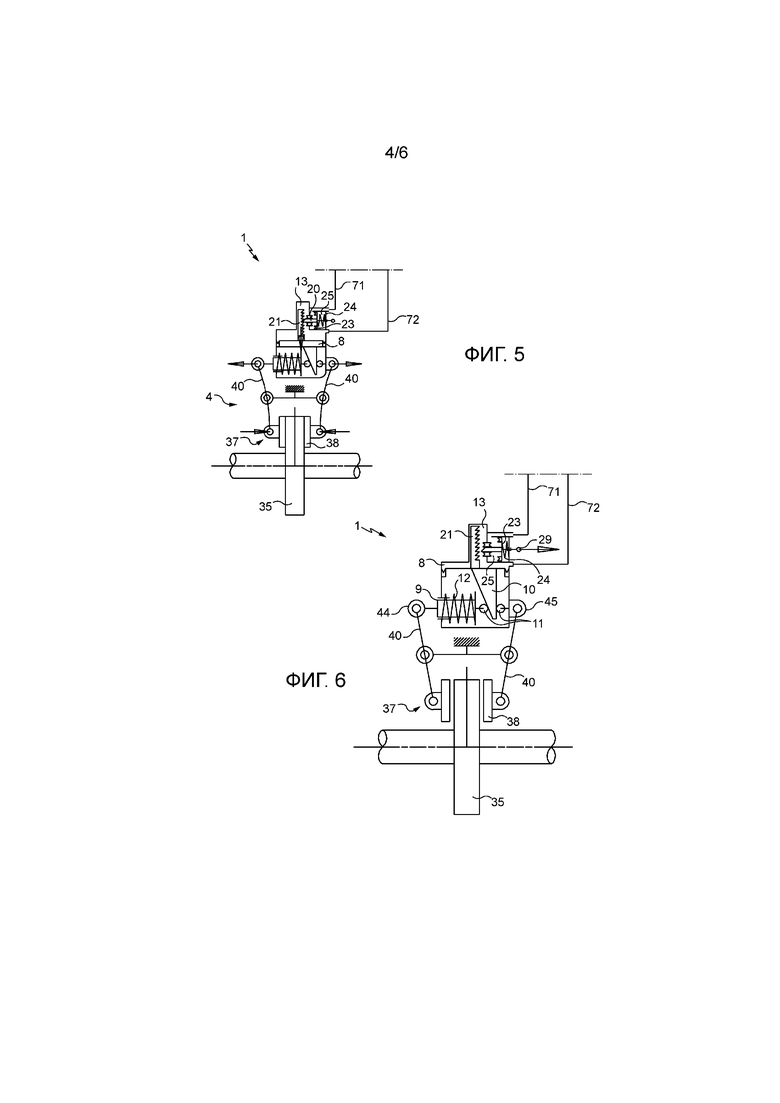
Фиг. 3-6 схематично иллюстрируют работу рельсовой системы торможения, показанной на фиг. 1, соответственно в разных конфигурациях.
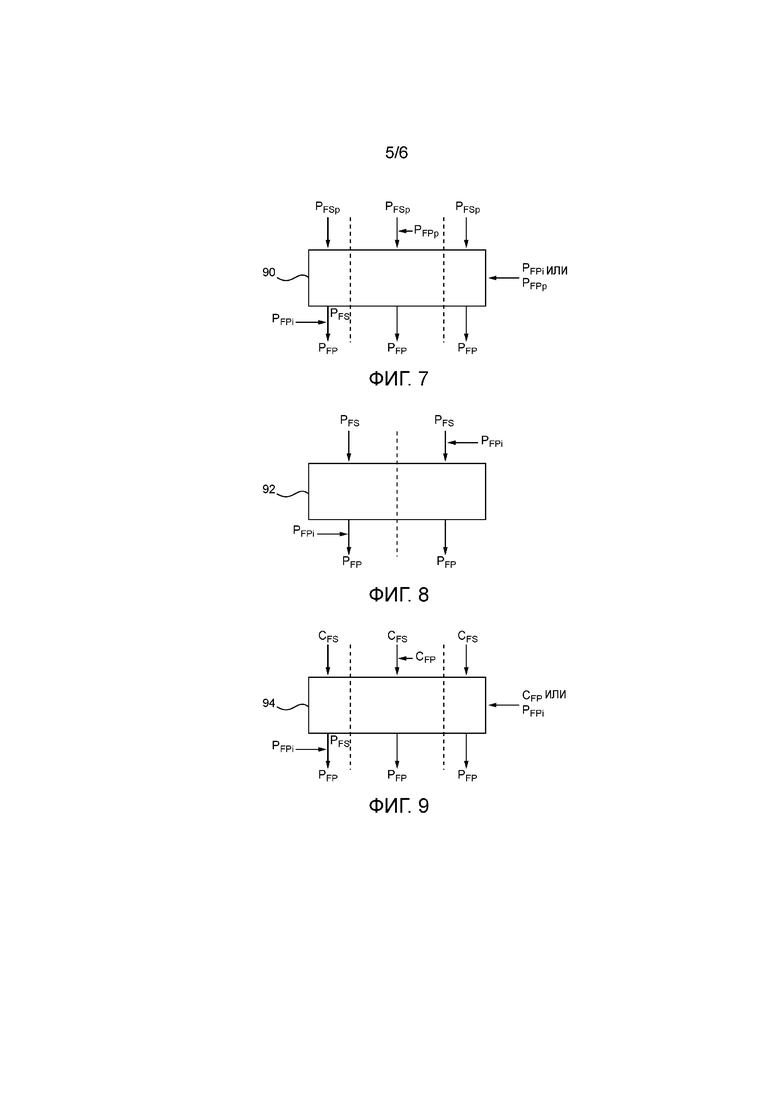
Фиг. 7-9 - схемы различных системных элементов блока контроля и управления, работающих в разных конфигурациях.
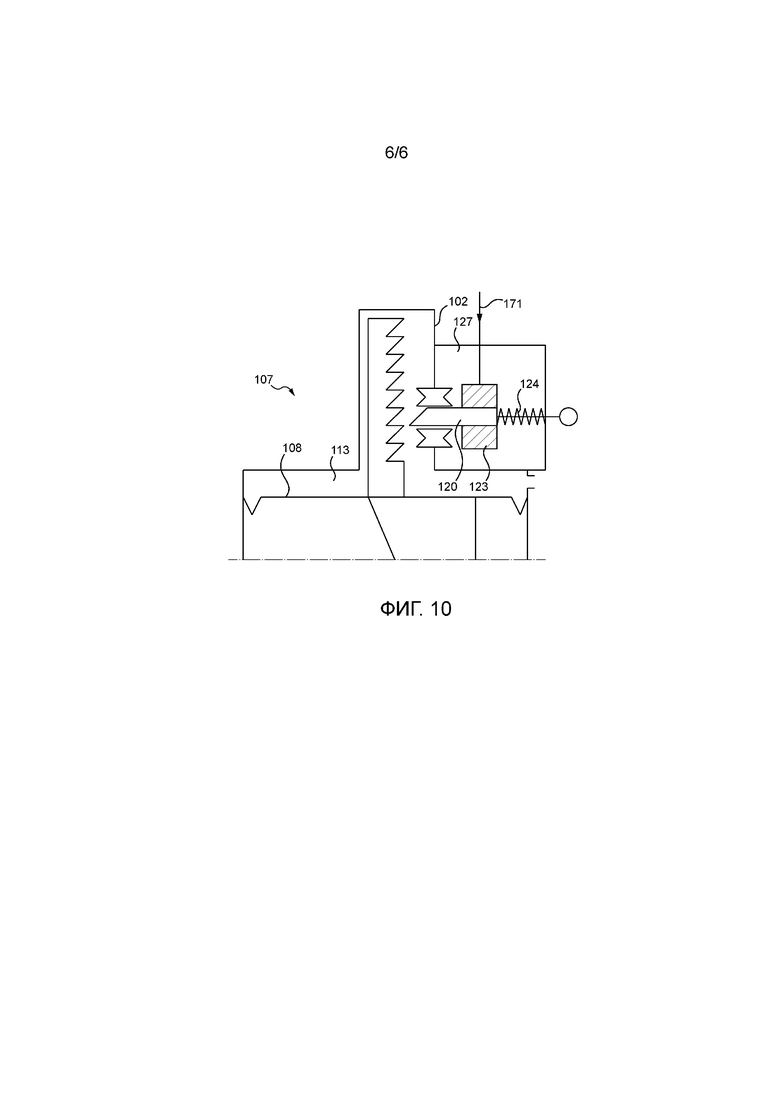
Фиг. 10 - вид, аналогичный фиг. 1, только частично показывающий рельсовую систему торможения согласно второму варианту выполнения.
На фиг. 1 схематично показана рельсовая система 1 торможения для рельсового транспортного средства с тормозом с накладками или с башмаками.
Рельсовая система 1 торможения содержит корпус 2, в данном случае образующий цилиндр одновременно рабочего тормоза 6 и стояночного тормоза 7, блок 3 управления и контроля, выполненный с возможностью управлять работой рабочего тормоза 6 и стояночного тормоза 7, сеть пневматических трубопроводов, соединенную с корпусом 2 и с блоком 3 управления и контроля, систему 4 тормозных рычагов, механически соединенную с корпусом 2, а также тормоз 5 с накладками, на который может действовать система 4 тормозных рычагов.
В данном случае корпус имеет форму в основном закрытого кожуха.
Рабочий тормоз 6 содержит поршень 8 рабочего тормоза, подвижный относительно корпуса 2 в первом осевом направлении, толкающий шток 9, тоже подвижный относительно корпуса 2 во втором осевом направлении, перпендикулярном к первому осевому направлению.
Тормозной поршень 8 ограничивает вместе с корпусом 2 камеру 13 давления рабочего тормоза.
Тормозной поршень 8 имеет две стороны: соответственно первую сторону 17, выполненную с возможностью воздействовать на систему 4 тормозных рычагов через толкающий шток 9, и вторую сторону 18, противоположную первой стороне 17 и обращенную к камере 13 давления рабочего тормоза.
Рабочий тормоз 6 содержит также зубчатую рейку 21, закрепленную на второй стороне 18 тормозного поршня 8. Эта зубчатая рейка 21 расположена продольно в первом осевом направлении.
Тормозной поршень 8 выполнен с возможностью перемещения в корпусе 2, сохраняя при этом камеру 13 давления рабочего тормоза относительно герметичной, благодаря диафрагме 14, расположенной между этим тормозным поршнем 8 и внутренними краями корпуса 2.
Рабочий тормоз 6 дополнительно содержит клиновую деталь 10, закрепленную на первой стороне 17 тормозного поршня 8.
Эта клиновая деталь 10 имеет треугольное сечение и выполнена с возможностью взаимодействия с набором подшипниковых упоров 11, при этом один из подшипниковых упоров соединен с корпусом 2, тогда как другой подшипниковый упор соединен с толкающим штоком 9.
Этот толкающий шток 9 оснащен регулятором износа, выполненным с возможностью компенсировать износ накладок тормоза 5, чтобы избегать уменьшения усилия торможения из-за слишком большого зазора (вследствие износа накладок).
Рабочий тормоз 6 содержит также пружину 12, расположенную в данном случае вокруг толкающего штока 9 между соединенным с ним подшипниковым упором и внутренним краем корпуса 2. Эта пружина 12 выполнена с возможностью подпружинивать упор, который соединен с толкающим штоком 9, в сторону клиновой детали 10.
Рабочий тормоз 6 содержит также первое отверстие 15, выполненное в корпусе 2 с возможностью обеспечения перемещения толкающего штока 9 через это первое отверстие 15.
Рабочий тормоз 6 содержит также второе отверстие 16, выполненное в корпусе 2 и сообщающееся с камерой 13 давления рабочего тормоза.
В данном случае камера 13 давления рабочего тормоза соединена первым трубопроводом 72 питания сети пневматических трубопроводов, называемым также трубопроводом рабочего тормоза и экстренного тормоза, подсоединенным на уровне этого второго отверстия 16, с источником текучей среды под давлением, например, таким как пневматический контур.
Корпус 2 содержит полость 27, которая примыкает к камере 13 давления рабочего тормоза и в которой расположен стояночный тормоз 7.
Стояночный тормоз 7 содержит устройство блокировки, выполненное в данном случае в виде блокировочного пальца 20, подвижного относительно корпуса 2 и проходящего во втором осевом направлении.
Кроме того, в данном случае стояночный тормоз 7 содержит удерживающий поршень 23, подвижный относительно корпуса 2 и ограничивающий вместе с последним камеру 25 давления стояночного тормоза.
Этот удерживающий поршень 23 имеет две стороны: соответственно первую сторону 31, на которой установлен блокировочный палец 20, и вторую сторону 32, противоположную первой стороне 31 и обращенную к камере 25 давления стояночного тормоза.
Кроме того, в данном случае стояночный тормоз 7 содержит пружинный элемент 24, расположенный между корпусом 2 и второй стороной 32 удерживающего поршня 23. Этот пружинный элемент 24 выполнен с возможностью воздействия на этот удерживающий поршень 23 и, следовательно, на блокировочный палец 20.
Можно отметить, что удерживающий поршень 23 и пружинный элемент 24 образуют в данном случае подвижное устройство управления стояночного тормоза 7.
Удерживающий поршень 23 выполнен с возможностью перемещаться в корпусе 2, сохраняя при этом камеру 25 давления стояночного тормоза относительно герметичной, благодаря диафрагме (не показана), расположенной между этим удерживающим поршнем 23 и внутренними краями корпуса 2.
Стояночный тормоз 7 содержит третье отверстие (не показано), выполненное в корпусе 2 и сообщающееся одновременно с камерой 25 давления стояночного тормоза и с камерой 13 давления рабочего тормоза, при этом третье отверстие выполнено с возможностью обеспечения перемещения блокировочного пальца 20 через это третье отверстие.
Следует отметить, что относительная герметичность между камерой 25 давления стояночного тормоза и камерой 13 давления рабочего тормоза обеспечивается за счет присутствия уплотнительной прокладки 33, расположенной между третьим отверстием и блокировочным пальцем 20.
Стояночный тормоз 7 содержит также четвертое отверстие 28, выполненное в корпусе 2 и сообщающееся с камерой 25 давления стояночного тормоза.
Эта камера 25 давления стояночного тормоза соединена вторым трубопроводом 71 питания сети пневматических трубопроводов, называемым также трубопроводом стояночного тормоза, подсоединенным на уровне четвертого отверстия 28, с источником текучей среды под давлением, например, таким как пневматический контур.
Стояночный тормоз 7 дополнительно содержит деталь 29 разблокировки, связанную с второй стороной 32 удерживающего поршня 23 и выходящую наружу корпуса 2 через пятое отверстие (не показано), выполненное в корпусе 2 и сообщающееся с полостью 27; эта деталь 29 доступна, таким образом, для ее манипулирования снаружи корпуса 2 в случае необходимости.
Рабочий тормоз 6 расположен в корпусе 2 и выполнен с возможностью воздействовать на тормоз 5 через систему 4 тормозных рычагов.
Этот тормоз 5 содержит тормозной диск 35 (в данном случае показан сверху), установленный, например, на колесной оси 36 рельсового транспортного средства или непосредственно на предназначенном для торможения колесе.
Этот тормоз 5 содержит также две колодки 37, каждая из которых оснащена накладкой 36, выполненной с возможностью вхождения в контакт с диском 35 для понижения его скорости вращения и, следовательно, скорости вращения затормаживаемого колеса, а также крепежную проушину 39, расположенную противоположно поверхности накладки 38, выполненной с возможностью прижиматься к тормозному диску 35.
Система 4 тормозных рычагов содержит два или четыре деформирующихся рычага 40, каждый из которых имеет неподвижно соединенные друг с другом верхний участок и нижний участок. В данном случае показаны только два рычага, и в случае, когда система рычагов содержит четыре рычага, они могут быть попарно соединены друг с другом или в варианте могут быть независимыми друг от друга.
Каждый участок рычагов 40 шарнирно соединен с центральным соединителем 41 при помощи двух поворотных осей 42.
Нижний участок каждого деформирующегося рычага 40 соединен с одной из колодок 37 при помощи ее крепежной проушины 39.
Верхний участок каждого деформирующегося рычага 40 соединен с соответствующим шарниром 44, 45.
Корпус 3 заходит в систему 4 тормозных рычагов между верхними участками деформирующихся рычагов 40 на уровне шарниров 45 и 46.
Корпус 2 установлен с возможностью поворота на шарнире 44, который соединен с концом толкающего штока 9, и неподвижно установлен на шарнире 45, который неподвижно соединен непосредственно с этим корпусом 2.
Система 4 тормозных рычагов содержит также крепежную лапку 43, неподвижно соединенную с центральным соединителем 41, для монтажа этой системы 4 тормозных рычагов на рельсовом транспортном средстве, таким образом, чтобы тормозные колодки 37 находились с двух сторон от тормозного диска 35 (или от колеса рельсового транспортного средства).
Следует отметить, что сближение шарниров 44 и 45 обеспечивает раздвигание 37 колодок и, наоборот, удаление этих шарниров 44 и 45 друг от друга позволяет прижать колодки 37 к тормозному диску 35 (или к колесу рельсового транспортного средства).
В данном случае сеть пневматических трубопроводов содержит главный пневматический контур, состоящий из главного и общего трубопроводов 70, каждый из которых выполнен с возможностью проходить вдоль рельсового транспортного средства.
Общий и главный трубопроводы 70 выполнены отдельно, не соединены между собой и, как правило, проходят параллельно. Общий трубопровод позволяет обеспечивать пневматическую непрерывность вдоль поезда и обеспечивает рабочее торможение поезда, используя напрямую текучую среду, проходящую в общем трубопроводе. Главный трубопровод позволяет питать устройства, в частности, рельсовой системы торможения, например, резервуары (более детально описаны ниже).
Эта сеть содержит также пневматический контур питания камер рабочего и стояночного тормозов, соответственно 13 и 25, образованный, в частности, первым и вторым трубопроводами 72 и 71 питания.
Блок 3 контроля и управления соединен с камерой 13 давления рабочего тормоза при помощи первого трубопровода 72 питания, с которым он соединен.
Блок 3 контроля и управления соединен в данном случае также с камерой 25 давления стояночного тормоза при помощи второго трубопровода 71 питания, с которым он соединен.
Блок 3 контроля и управления содержит системные элементы (не показаны), которые выполнены с возможностью получать и обрабатывать информацию, касающуюся заданных значений работы рельсового транспортного средства, через первый канал электрического и/или пневматического и/или ручного типа, обозначенный на фиг. 1 позицией 50.
Эти системные элементы могут, например, представлять собой пневматические реле и/или электрические реле, и/или электронные платы, и/или центральные блоки обработки или микропроцессоры, и/или компоненты оперативной памяти, содержащие регистры, выполненные с возможностью записи переменных величин параметров, создаваемых и изменяемых в ходе исполнения программ, и/или коммуникационные интерфейсы, выполненные с возможностью передачи и получения данных, и/или внутренние элементы записи, такие как жесткие диски, которые могут, в частности, содержать исполняемые программные коды, обеспечивающие управление рабочим и стояночным тормозами 6 и 7.
Кроме того, эти системные элементы могут быть выполнены с возможностью получения и обработки информации, относящейся к параметрам использования рельсового транспортного средства, по второму каналу электрического и/или пневматического и/или ручного типа, обозначенному на фиг. 1 позицией 60.
Следует отметить, что на фиг. 1 блок 3 контроля и управления связан с системой тормозных рычагов и только с тормозом 5 рельсового транспортного средства. В варианте такой блок контроля и управления может быть связан с колесной осью (не показана) рельсового транспортного средства, оснащенной несколькими тормозами 5, или с колесной тележкой (не показана) рельсового транспортного средства, оснащенной двумя колесными осями, или с вагоном (не показан) рельсового транспортного средства, оснащенным двумя колесными тележками, или рельсовое транспортное средство может содержать только один такой блок контроля и управления.
На фиг. 2 схематично и более детально показана сеть пневматических трубопроводов и первый и второй каналы, по которым проходит репрезентативная информация, получаемая блоком 3 контроля и управления.
Главный контур сети содержит первую точку отвода к первому вспомогательному трубопроводу 81, соединенному одним концом с общим трубопроводом из трубопроводов 70 и другим концом с блоком 3 контроля и управления.
Сеть оснащена первым вспомогательным резервуаром 74, соединенным с первым вспомогательным трубопроводом 81 через первый соединительный трубопровод 80.
Этот первый вспомогательный резервуар 74 получает питание через главный трубопровод из трубопроводов 70, и, кроме того, сеть оснащена первым обратным клапаном 82, установленным на первом вспомогательном трубопроводе 81 между главным трубопроводом и первым вспомогательным резервуаром 74.
Главный трубопровод выполнен с возможностью транспортировки текучей среды под заранее определенным давлением. Таким образом, вспомогательный резервуар 74 содержит текучую среду под таким первым заранее определенным давлением.
Такой первый вспомогательный резервуар 74 может, например, присутствовать на каждой колесной тележке рельсового транспортного средства.
Главный контур сети дополнительно содержит вторую точку отвода к второму вспомогательному трубопроводу 84, соединенному одним концом с главным трубопроводом и противоположным концом с блоком 3 контроля и управления.
Сеть оснащена вторым вспомогательным резервуаром 75, соединенным с вторым вспомогательным трубопроводом 84 через второй соединительный трубопровод 83.
Этот второй вспомогательный резервуар 75 получает питание через главный трубопровод, и, кроме того, сеть оснащена вторым обратным клапаном 8, установленным на втором вспомогательном трубопроводе 84 между главным трубопроводом и вторым вспомогательным резервуаром 75.
Главный трубопровод выполнен с возможностью транспортировки текучей среды под заранее определенным давлением. Таким образом, вспомогательный резервуар 74 содержит текучую среду под таким первым заранее определенным давлением.
Такой второй вспомогательный резервуар 75 может, например, присутствовать на каждой колесной тележке рельсового транспортного средства.
Следует отметить, что главный трубопровод и общий трубопровод, первый и второй вспомогательные трубопроводы 81 и 84 и первый и второй вспомогательные резервуары 74 и 75 схематично расположены в данном случае на входе блока 3 контроля и управления и подсоединены к входу этого блока 3 контроля и управления.
С другой стороны, первый и второй трубопроводы 71 и 72 питания схематично расположены на выходе блока 3 контроля и управления и подсоединены к выходу этого блока 3 контроля и управления.
Кроме того, сеть содержит третий трубопровод 73 питания, называемый также специальным промежуточным трубопроводом, расположенный схематично на выходе блока 3 контроля и управления и подсоединенный к выходу этого блока 3 контроля и управления.
Этот третий трубопровод 73 питания подсоединен также на уровне второго отверстия 16 камеры 13 рабочего тормоза так же, как и первый трубопровод 72 питания.
Третий трубопровод 73 питания выполнен с возможностью транспортировки текучей среды, поступающей из источника пневматического рабочего тела, только когда стояночный тормоз 6 находится в рабочей конфигурации (см. ниже), то есть в обход трубопровода 72 рабочего тормоза.
Среди заданных значений работы рельсового транспортного средства блок 3 контроля и управления может получать и обрабатывать по меньшей мере одну информацию, характеризующую заданное значение рабочего тормоза, обозначенное CFS, по меньшей мере одну информацию, характеризующую заданное значение стояночного тормоза, обозначенное CFP, и по меньшей мере одну информацию, характеризующую заданное значение экстренного тормоза, обозначенное CFU.
Как было указано выше, эти заданные значения могут соответствовать одному или нескольким электрическим и/или пневматическим и/или ручным сигналов.
Среди параметров использования рельсового транспортного средства блок 3 контроля и управления может получать и обрабатывать по меньшей мере одну информацию, характеризующую тягу транспортного средства, и/или по меньшей мере одну информацию, характеризующую скорость транспортного средства, и/или по меньшей мере одну информацию, характеризующую нагрузку транспортного средства, и/или по меньшей мере одну информацию, характеризующую анти-заклинивание (или заклинивание) транспортного средства, и/или по меньшей мере одну информацию, характеризующую значения давления в пневматических трубопроводах транспортного средства, в частности, в главном трубопроводе, в общем трубопроводе, во вспомогательных трубопроводах 81 и 84 и в трубопроводах 71, 72 и 73 питания, и/или по меньшей мере одну информацию, характеризующую электрическую энергию транспортного средства.
Что касается нагрузки транспортного средства, получаемая информация может, например, относиться только к одному вагону или к нескольким последовательным вагонам, или ко всему рельсовому транспортному средству. Это зависит от числа систем торможения в соответствии с изобретением и от стратегии управления торможением.
Кроме того, необходимо отметить, что некоторые рабочие параметры некоторых рельсовых транспортных средств могут быть естественным образом (или первоначально) привязаны к нагрузке транспортного средства, например, чтобы управлять рабочим тормозом, тогда как другие параметры не привязаны к нагрузке транспортного средства.
В данном случае блок 3 контроля и управления выполнен с возможностью получать заданное значение рабочего тормоза CFS и по меньшей мере одну информацию, характеризующую по меньшей мере один из вышеупомянутых параметров использования транспортного средства.
Как было указано выше, речь может идти о заданном значении рабочего тормоза CFS или о заданном значении экстренного тормоза CFU.
Кроме того, блок 3 контроля и управления выполнен с возможностью получать значение первого источника пневматического рабочего тела для питания камеры 13 давления рабочего тормоза, когда заданное значение рабочего тормоза CFS не равно нулю.
Кроме того, блок 3 контроля и управления выполнен с возможностью получать заданное значение стояночного тормоза CFP или определять это заданное значение стояночного тормоза CFP в зависимости от параметра или параметров использования рельсового транспортного средства.
Кроме того, блок 3 контроля и управления выполнен с возможностью определять значение третьего источника пневматического рабочего тела для питания камеры 25 давления стояночного тормоза через трубопровод 71 стояночного тормоза, когда заданное значение стояночного тормоза CFP не равно нулю.
Это значение третьего источника пневматического рабочего тела определяют в зависимости от заданного значения стояночного тормоза CFP. Например, это значение является нулевым, когда заданное значение стояночного тормоза CFP не равно нулю или когда необходимо применить стояночный тормоз 6.
Кроме того, блок 3 контроля и управления выполнен с возможностью определять значение второго источника пневматического рабочего тела для питания камеры 13 давления рабочего тормоза через трубопровод 72 рабочего тормоза или через специальный промежуточный трубопровод 73, когда заданное значение стояночного тормоза CFP не равно нулю.
Это значение второго источника пневматического рабочего тела определяют в зависимости от заданного значения стояночного тормоза CFP, и/или от значения первого источника пневматического рабочего тела, и/или от заданного значения рабочего тормоза CFS, и/или от параметра или параметров использования рельсового транспортного средства.
Блок 3 контроля и управления может быть выполнен с возможностью определять скорректированное значение первого источника пневматического рабочего тела в зависимости от заданного значения стояночного тормоза CFP, и/или от значения первого источника пневматического рабочего тела, и/или от заданного значения рабочего тормоза CFS, и/или от параметра или параметров использования рельсового транспортного средства, и, в случае необходимости, определенное значение второго источника пневматического рабочего тела равно этому скорректированному значению.
Значение второго источника пневматического рабочего тела можно определять таким образом, чтобы оно было постоянным или, в варианте, чтобы оно менялось в зависимости от значения первого источника пневматического рабочего тела.
Далее следует описание работы рельсовой системы 1 торможения со ссылками на фиг. 1 и на фиг. 3-6, на которых схематично представлены разные конфигурации этой системы 1.
На фиг. 1 рельсовая система 1 торможения находится в конфигурации возврата в исходное положение. Заданное значение рабочего тормоза CFS, заданное значение экстренного тормоза и заданное значение стояночного тормоза в данном случае являются нулевыми.
В этой конфигурации возврата в исходное положение камера 13 давления рабочего тормоза не получает питания (она опорожнена), поэтому тормозной поршень 8 находится в положении покоя, в котором он не действует тормозным усилием на толкающий шток 9.
Следовательно, шарниры 44 и 45 системы 4 тормозных рычагов находятся на расстоянии друг от друга, что позволяет удерживать колодки 37 на расстоянии от тормозного диска 35.
Камера 25 давления стояночного тормоза получает питание через трубопровод 71 стояночного тормоза, в котором проходит третий источник пневматического рабочего тела.
Этот третий источник пневматического рабочего тела может выходить непосредственно из общего трубопровода, или из первого вспомогательного резервуара 74 или из второго вспомогательного резервуара 75.
Следовательно, камера 25 давления стояночного тормоза находится под давлением, поэтому удерживающий поршень 23 находится в первом положении, в котором пружинный элемент 24 сжат и блокировочный палец 20 находится в первом положении на расстоянии от зубчатой рейки 21 рабочего тормоза 6.
В этой конфигурации возврата в исходное положение системы 1 стояночный тормоз 7 находится во взведенной конфигурации, тогда как рабочий тормоз 6 находится в конфигурации покоя.
Следует отметить, что предпочтительно стояночный тормоз 7 рассчитан и выполнен таким образом, чтобы давление взведения стояночного тормоза 7 было относительно слабым, например, примерно от 2 бар до 6 бар.
На фиг. 3 рельсовая система 1 торможения показана в конфигурации применения рабочего тормоза 6. Следовательно, заданное значение рабочего тормоза CFS не равно нулю.
В этой конфигурации применения рабочего тормоза 6 камера 13 давления рабочего тормоза получает питание через трубопровод 72 рабочего тормоза, в котором проходит первый источник пневматического рабочего тела.
Этот первый источник пневматического рабочего тела может выходить непосредственно или опосредованно из общего трубопровода, или из первого вспомогательного резервуара 74 или из второго вспомогательного резервуара 75.
Как будет показано ниже со ссылками на фиг. 9, этот первый источник пневматического рабочего тела можно генерировать при помощи устройства генерирования пневматического давления на основании контрольного давления.
Таким образом, камера 13 давления рабочего тормоза находится под давлением, и тормозной поршень 8 переместился в первом осевом направлении из своего первого положения во второе положение, в котором клиновая деталь 10 раздвинула набор подшипниковых упоров 11, переместив, таким образом, толкающий шток 9 и шарнир 44.
Следовательно, шарниры 44 и 45 отходят друг от друга и способствуют сближению колодок 37 и, следовательно, прижатию накладок 38 к тормозному диску 35.
Следует отметить, что в конфигурации применения рабочего тормоза 6 камера 25 давления стояночного тормоза по-прежнему находится под давлением, как было указано со ссылками на фиг. 1.
В этой конфигурации применения рабочего тормоза 6 системы 1 стояночный тормоз 7 по-прежнему находится в своей взведенной конфигурации, тогда как рабочий тормоз 6 находится в рабочей конфигурации.
Следует также отметить, что в конфигурации, показанной на фиг. 3, определенное значение давления текучей среды, нагнетаемой в камеру 13 давления рабочего тормоза, перемещает тормозной поршень 8 на заранее определенный ход, чтобы воздействовать на систему 4 тормозных рычагов первой определенной силой и, следовательно, приложить первое определенное усилие к тормозному диску 35.
На фиг. 4 рельсовая система 2 торможения показана в конфигурации блокировки, в которой тормозной поршень 8 рабочего тормоза 6 заблокирован в своем втором положении, показанном на фиг. 3.
Следует отметить, что в данном случае система 4 тормозных рычагов находится в том же положении, что и на фиг. 3.
Камера 13 давления рабочего тормоза по-прежнему находится под давлением, тогда как камера 25 давления стояночного тормоза опорожнена. Следовательно, заданные значения рабочего тормоза CFS и стояночного тормоза CFP не равны нулю.
Опорожнение камеры 25 давления стояночного тормоза освобождает пружинный элемент 24, который перемещает удерживающий поршень из его первого положения во второе положение, называемое положением блокировки, и, таким образом, перемещает блокировочный палец 20 из его первого положения во второе положение, в котором он блокирует зубчатую рейку 21 за счет зацепления дистального конца этого блокировочного пальца 20 с зубцами, выполненными на зубчатой рейке 21.
На этой же фиг. 4 рельсовая система 2 торможения показана также в так называемой конфигурации избыточного питания рабочего тормоза 6.
Текучая среда, проходящая по трубопроводу 72 рабочего тормоза, может выходить из второго источника пневматического рабочего тела и может иметь значение давления, превышающее значение давления первого источника.
Избыточное питание этой камеры 13 давления рабочего тормоза текучей средой позволяет переместить тормозной поршень 8, чтобы еще дальше раздвинуть набор подшипниковых упоров 11 и еще дальше удалить друг от друга шарниры 44 и 45 системы 4 тормозных рычагов.
В варианте, избыточное питание камеры 13 давления рабочего тормоза может происходить через специальный промежуточный трубопровод 73, в котором проходит второй источник пневматического рабочего тела.
Это удаление, отражающее вторую определенную силу, превышающую первую определенную силу, прикладываемую тормозным поршнем 6, создает второе определенное усилие, превышающее первое определенное усилие, на тормозном диске 35 через колодки 37.
Следует отметить, что зубчатая рейка 21 и блокировочный палец 20 выполнены с возможностью обеспечения такого перемещения тормозного поршня 8, тогда как блокировочный палец 20 блокирует эту зубчатую рейку 21.
Например, зубчатая рейка 21 имеет заранее определенные зубцы, и дистальный конец блокировочного пальца 20 тоже имеет заранее определенные зубцы, соответствующие заранее определенным зубцам зубчатой рейки 21.
Необходимо отметить, что блокировочный палец 20 позволяет зубчатой рейке 21 перемещаться только в направлении перемещения тормозного поршня 8, чтобы еще больше зажимать тормозной диск 35, и опять блокирует зубчатую рейку 21, как только она останавливается, во втором положении тормозного поршня 8.
В варианте, текучая среда, проходящая по трубопроводу 72 рабочего тормоза, может выходить из второго источника пневматического рабочего тела и может иметь давление, по существу равное или меньшее значения давления первого источника; и, в случае необходимости, речь идет не об избыточном питании, как этом было описано выше, а о питании камеры 13 давления рабочего тормоза, которое обеспечивает определенное усилие стояночного тормоза.
В целом, значение давления второго источника определяют относительно значения первого источника таким образом, чтобы приложить определенное усилие стояночного тормоза.
В этих конфигурациях блокировки и избыточного питания рабочего тормоза 6 стояночный тормоз 7 и рабочий тормоз 6 находятся, каждый, в рабочей конфигурации.
В варианте выполнения блок 3 контроля и управления может получать не равное нулю заданное значения стояночного тормоза CFP, получив перед этим нулевое заданное значение рабочего тормоза CFS.
В случае необходимости, тормозной поршень 8 рабочего тормоза 6 сначала блокируют в его первом положении, показанном на фиг. 1, затем трубопровод 72 рабочего тормоза и/или специальный промежуточный трубопровод 73 транспортирует текучую среду из второго источника пневматического рабочего тела в обход трубопровода 72 рабочего тормоза.
В целом, порядок, в котором осуществляют операции блокировки путем применения стояночного тормоза 7 и питания и/или избыточного питания рабочего тормоза 6, не имеет значения; и эти операции можно также осуществлять одновременно.
На фиг. 5 рельсовая система 2 торможения показана в конфигурации опорожнения рабочего тормоза 6. Заданное значение рабочего тормоза CFS является нулевым, тогда как заданное значение стояночного тормоза CFP не равно нулю.
Опорожнение камеры 13 давления рабочего тормоза можно осуществлять через утечки в сеть 3. Иначе говоря, ни камера 13 давления рабочего тормоза, ни трубопровод 72 рабочего тормоза не сообщаются напрямую с атмосферой.
Необходимо отметить, что текучая среда под давлением, присутствующая в камере 13 давления рабочего тормоза, выходит из последней, в частности, через трубопровод 72 рабочего тормоза.
Можно также отметить, что, благодаря стояночному тормозу 6 и, в частности, узлу, состоящему из блокировочного пальца 20, удерживающего поршня 23 и пружинного элемента 24, в комбинации с зубчатой рейкой 21, закрепленной на тормозном поршне 8 рабочего тормоза 6, этот тормозной поршень 8 остается в своем третьем положении, в котором он действует на систему 4 тормозных рычагов, чтобы прикладывать заранее определенное второе усилие на тормозной диск 35 через колодки 37, несмотря на опорожнение камеры 13 давления рабочего тормоза.
В этой конфигурации опорожнения рабочего тормоза 6 стояночный тормоз 7 находится в рабочей конфигурации, тогда как рабочий тормоз 6 заблокирован в своей рабочей конфигурации, несмотря на опорожнение камеры 13 давления рабочего тормоза.
На фиг. 6 рельсовая система 1 торможения показана в конфигурации разблокировки. Следовательно, заданные значения рабочего тормоза CFS и стояночного тормоза CFP являются нулевыми.
В этой конфигурации разблокировки к детали 29 разблокировки 29 стояночного тормоза 6 было приложено усилие, чтобы вытянуть эту деталь 29 разблокировки наружу корпуса 2.
Перемещение этой детали 29 разблокировки приводит к перемещению удерживающего поршня 23 и, следовательно, блокировочного пальца 20 с преодолением усилия пружинного элемента 24, который оказывается, таким образом, сжатым.
Поскольку блокировочный палец 20 достигает своего второго положения, он больше не взаимодействует с зубчатой рейкой 21 и, таким образом, оказывается свободным.
Следовательно, пружина 12, расположенная вокруг толкающего штока 9 и между внутренним краем корпуса 2 и подшипниковым упором, закрепленным на толкающем штоке 9, оказывается в своем первоначальном положении.
Эта пружина 12 перемещает подшипниковый упор 11, расположенный между толкающим штоком 9 и клиновой деталью 10, во втором осевом направлении, что приводит к возврату тормозного поршня 8 в первом осевом направлении в его положение покоя.
Шарниры 44 и 45 системы тормозных рычагов сближаются друг с другом, поэтому деформирующиеся рычаги 40 оказываются в своих первоначальных положениях, показанных на фиг. 1, и колодки 37 оказываются на расстоянии от тормозного диска 35, который, таким образом, может свободно вращаться (тормозной диск 35 больше не заторможен).
В этой конфигурации разблокировки стояночный тормоз 7 находится в конфигурации разблокировки, тогда как рабочий тормоз 6 находится в конфигурации покоя.
Следует отметить, что стояночный тормоз 6 выполнен таким образом, что усилие, прикладываемое для разблокировки через деталь 29 разблокировки, является относительно слабым, и его может приложить пользователь, такой как машинист рельсового транспортного средства. Например, это усилие составляет примерно от 5 до 50 даН.
Показанный на фиг. 7 блок 3 контроля и управления содержит релейное устройство 90, выполненное с возможностью генерировать давление использования текучей среды на основании контрольного значения давления.
Согласно варианту выполнения (слева на фиг. 7), релейное устройство 90 выполнено с возможностью получать на входе контрольное значение первого источника пневматического рабочего тела PFSp.
Кроме того, релейное устройство 90 выполнено с возможностью генерировать и выдавать на выходе определенное значение первого источника пневматического рабочего тела PFS.
В случае необходимости, блок 3 контроля и управления выполнен с возможностью получать на выходе релейного устройства 90 промежуточное значение второго источника пневматического рабочего тела PFPi, которое заменяет или добавляется к значению первого источника пневматического рабочего тела PFS, чтобы генерировать определенное значение второго источника пневматического рабочего тела PFP.
Согласно другому варианту выполнения (в центре на фиг. 7), релейное устройство 90 выполнено с возможностью получать на входе контрольное значение первого источника пневматического рабочего тела PFSp и контрольное значение второго источника пневматического рабочего тела PFPp, которое заменяет или добавляется к контрольному значению упомянутого первого источника пневматического рабочего тела PFSp.
Кроме того, релейное устройство 90 выполнено с возможностью выдавать на выходе определенное значение второго источника пневматического рабочего тела PFP.
Согласно еще одному варианту выполнения (справа на фиг. 7), релейное устройство 90 выполнено с возможностью получать на входе контрольное значение первого источника пневматического рабочего тела PFSp.
Релейное устройство 90 выполнено также с возможностью получать в релейном устройстве 90 промежуточное значение или контрольное значение второго источника пневматического рабочего тела, соответственно PFPi или PFPp.
Кроме того, релейное устройство 90 выполнено с возможностью генерировать и выдавать на выходе определенное значение второго источника пневматического рабочего тела PFР.
Следует отметить, что релейное устройство 90 может, например, содержать управляемые или не управляемые золотниковые клапаны, и/или электроклапаны, и/или приводы.
На фиг. 8 блок 3 контроля и управления содержит устройство 92 анти-заклинивания, выполненное с возможностью обеспечения эффективности торможения рельсового транспортного средства.
В варианте выполнения (слева на фиг. 8) блок 3 контроля и управления выполнен с возможностью генерировать определенное значение второго источника пневматического рабочего тела PFP, в частности, на основании значения первого источника пневматического рабочего тела PFS и промежуточного значения второго источника пневматического рабочего тела PFPi, которое заменяет или добавляется к значению первого источника пневматического рабочего тела PFS, на выходе устройства 92 анти-заклинивания.
В другом варианте выполнения (справа на фиг. 8) блок 3 контроля и управления выполнен с возможностью генерировать определенное значение второго источника пневматического рабочего тела PFP, в частности, на основании значения первого источника пневматического рабочего тела PFS и промежуточного значения второго источника пневматического рабочего тела PFPi, которое заменяет или добавляется к значению первого источника пневматического рабочего тела PFS, на входе устройства 92 анти-заклинивания.
Следует отметить, что устройство 92 анти-заклинивания может, например, содержать управляемые или не управляемые золотниковые клапаны, и/или электроклапаны, и/или приводы.
На фиг. 9 блок 3 контроля и управления содержит устройство 94 генерирования давления, выполненное с возможностью генерировать значение давления первого источника пневматического рабочего тела.
В варианте выполнения (слева на фиг. 9) это устройство 94 генерирования выполнено с возможностью получать на входе заданное значение рабочего тормоза CFS.
Кроме того, это устройство 94 генерирования выполнено с возможностью генерировать и выдавать на выходе значение первого источника пневматического рабочего тела PFS.
В случае необходимости, блок 3 контроля и управления выполнен с возможностью получать на выходе устройства 94 генерирования промежуточное значение второго источника пневматического рабочего тела PFPi, которое заменяет или добавляется к значению первого источника пневматического рабочего тела PFS, чтобы генерировать определенное значение второго источника пневматического рабочего тела PFP.
В другом варианте выполнения (в центре на фиг. 9) устройство 94 генерирования выполнено с возможностью получать на входе заданное значение рабочего тормоза CFS и заданное значение стояночного тормоза CFP, которое заменяет или добавляется к заданному значению рабочего тормоза CFS.
Кроме того, устройство 94 генерирования выполнено с возможностью генерировать и выдавать на выходе определенное значение второго источника пневматического рабочего тела PFP.
Еще в одном варианте выполнения (справа на фиг. 9) устройство 94 генерирования выполнено с возможностью получать на входе заданное значение рабочего тормоза CFS.
Кроме того, устройство 94 генерирования выполнено с возможностью получать в устройстве 94 генерирования заданное значение стояночного тормоза CFP и промежуточное значение второго источника пневматического рабочего тела PFPi.
Кроме того, устройство 94 генерирования выполнено с возможностью генерировать и выдавать на выходе определенное значение второго источника пневматического рабочего тела PFP.
Следует отметить, что устройство 94 генерирования может, например, содержать управляемые или не управляемые золотниковые клапаны, и/или электроклапаны, и/или приводы.
Согласно второму варианту выполнения рельсовой системы торможения, показанному на фиг. 10, в конфигурации блокировки устройство блокировки можно приводить в действие при помощи электрического привода, а не посредством создания давления в камере давления, питаемой, например, через распределитель.
Для аналогичных элементов использованы те же цифровые обозначения, но увеличенные на 100.
В данном случае стояночный тормоз 107 содержит электрический привод 123, который выполнен подвижным относительно корпуса 102 и расположен в полости 127 и с которым связан блокировочный палец 120; а также пружинный элемент 124, расположенный между корпусом 102 и одной стороной привода 123. Этот пружинный элемент 124 выполнен с возможностью воздействия на этот привод 123 и, следовательно, на блокировочный палец 120, который является подвижным в камере 113 давления рабочего тормоза, чтобы воздействовать на тормозной поршень 108. Электрический привод 123 и пружинный элемент 124 образуют в данном случае подвижное устройство управления стояночного тормоза 107, который, следовательно не имеет камеры давления стояночного тормоза.
В данном случае электрический привод электрически соединен с источником электрического питания при помощи электрического провода 171, выполненного с возможностью подсоединения к блоку контроля и управления.
В случае необходимости, блок контроля и управления выполнен с возможностью определять значение электрической энергии в зависимости от заданного значения стояночного тормоза с целью приведения в действие подвижного электрического привода 123 по меньшей мере в его положении блокировки для перемещения блокировочного пальца 120.
В не показанном варианте блок контроля и управления выполнен с возможностью определять параметр постоянной или переменной условной нагрузки в зависимости от заданного значения стояночного тормоза и/или от определенного значения второго источника пневматического рабочего тела и заменять полученный параметр нагрузки определенным параметром условной нагрузки.
Эта замена параметра нагрузки определенным параметром условной нагрузки требует, чтобы по меньшей мере некоторые из параметров транспортного средства, в частности, заданное значение рабочего тормоза, были первоначально привязаны к нагрузке; и позволяет, например, сделать эти обычно привязанные к нагрузке параметры не привязанными к нагрузке.
В другом не показанном варианте второй и третий источники пневматического рабочего тела совпадают, или, говоря другими словами, камера давления стояночного тормоза получает питание от второго источника пневматического рабочего тела.
В других не показанных вариантах:
- в конфигурации возврата в исходное положение рельсовой системы торможения операцию возврата в исходное положение осуществляют электрически, или механически, или гидравлически, а не пневматически;
- в конфигурации разблокировки рельсовой системы торможения деталь разблокировки удерживают в положении разблокировки стояночного тормоза при помощи пневматического, или электрического, или механического замка;
- в конфигурации разблокировки рельсовой системы торможения подачу команды разблокировки осуществляют вручную путем использования по меньшей мере одного провода или пневматически, или электрически, или гидравлически;
- конфигурацию разблокировки рельсовой системы торможения получают путем подачи питания в камеру давления стояночного тормоза, как при конфигурации возврата в исходное положение, а не путем приведения в действие детали разблокировки;
- камеру давления рабочего тормоза можно опорожнять принудительно, а не за счет утечек системы, в частности, до и даже после приведения в действие детали разблокировки стояночного тормоза, чтобы перевести систему в ее конфигурацию разблокировки;
- рельсовая система торможения не имеет первого вспомогательного резервуара и/или второго вспомогательного резервуара;
- блок контроля и управления может быть выполнен с возможностью модулировать значение первого источника пневматического рабочего тела в зависимости от параметра нагрузки;
- блок контроля и управления может быть выполнен с возможностью получать и корректировать заданное значение или заданные значения рабочего тормоза и/или экстренного тормоза и/или стояночного тормоза в зависимости от параметров нагрузки и изменять контрольные значения давления первого источника пневматического рабочего тела в зависимости от скорректированного заданного значения или скорректированных заданных значений;
- рельсовая система торможения может содержать рабочий тормоз, не имеющий клиновой детали, соединенной с тормозным поршнем, поэтому этот поршень может напрямую действовать на толкающий шток, который действует на деформирующиеся рычаги; в этом случае тормозной поршень вместе со своей зубчатой рейкой и толкающим штоком являются подвижными во втором осевом направлении, тогда как стояночный тормоз выполнен таким образом, чтобы блокировочный палец и удерживающий поршень были подвижными в первом осевом направлении;
- рельсовая система торможения имеет систему тормозных рычагов, отличающуюся от системы тормозных рычагов, показанной на фигурах, в частности, система тормозных рычагов содержит башмак, выполненный с возможностью воздействовать напрямую на колесо рельсового транспортного средства, причем этот башмак шарнирно установлен непосредственно при помощи шарнира типа поворотной оси, закрепленного на толкающем штоке, жесткий рычаг, закрепленный на корпусе системы, а также деформирующийся рычаг, закрепленный одновременно на жестком рычаге и на шарнире на башмаке; и/или
- рельсовая система торможения содержит систему тормозных рычагов, выполненную с возможностью воздействовать на тормоз с башмаками, как было описано выше, и оснащена рабочим тормозом с клиновой деталью, соединенной с тормозным поршнем, или без клиновой детали.
В целом необходимо отметить, что изобретение не ограничивается описанными и показанными на фигурах примерами.
Изобретение относится к области торможения рельсовых транспортных средств. Рельсовая система торможения содержит рабочий тормоз (6; 106), стояночный тормоз (7, 107) и блок (3) контроля и управления. Стояночный тормоз (7, 107) содержит устройство (20, 120) блокировки и подвижное устройство управления (23, 24; 123, 124). При этом блок (3) контроля и управления выполнен с возможностью: принимать информацию, характеризующую значение упомянутого первого источника пневматического рабочего тела; обрабатывать информацию, характеризующую заданное значение стояночного тормоза по меньшей мере в его рабочей конфигурации, для приведения в действие упомянутого устройства (23, 24; 123, 124) управления по меньшей мере в его положении блокировки; и определять значение упомянутого второго источника пневматического рабочего тела в зависимости от заданного значения стояночного тормоза и от информации, характеризующей значение первого источника пневматического рабочего тела, для запитки камеры (13; 113) давления рабочего тормоза. Технический результат: создание системы торможения для рельсового транспортного средства, имеющей улучшенные характеристики, будучи при этом простой, удобной и экономичной. 2 н. и 24 з.п. ф-лы, 10 ил. 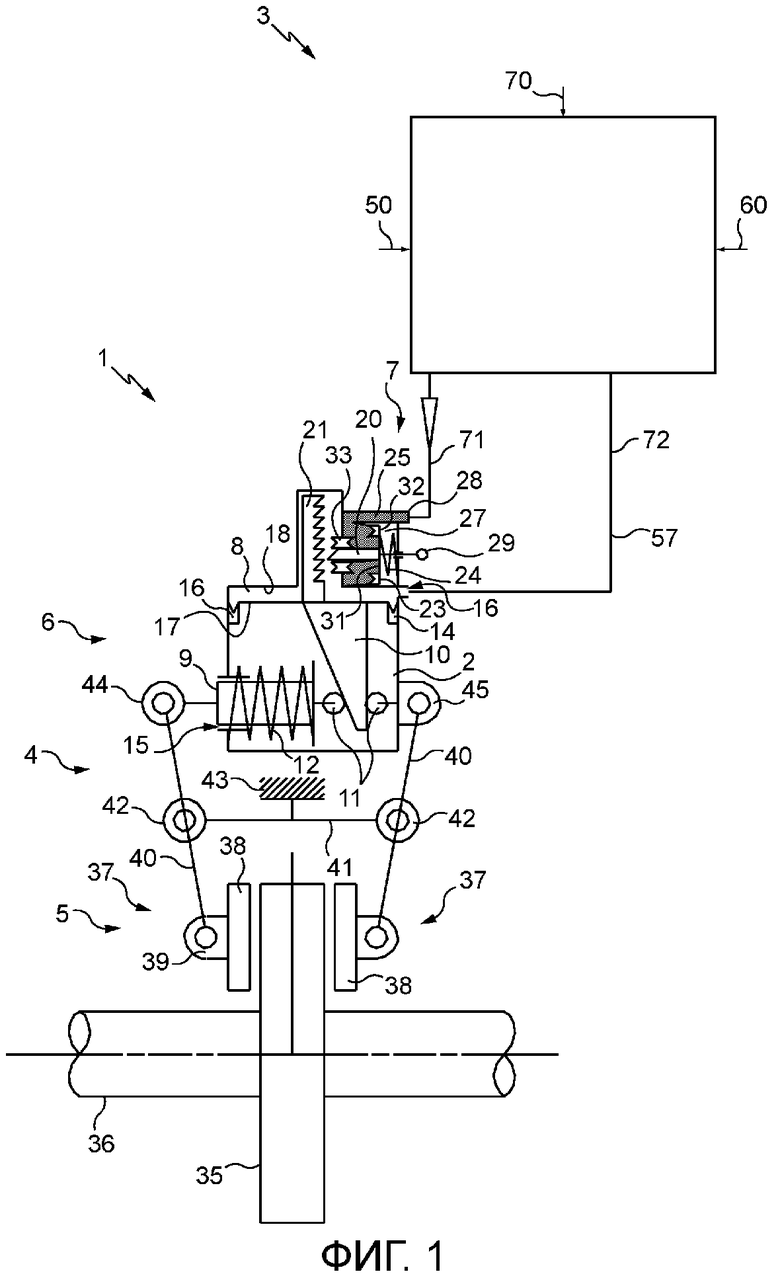
1. Рельсовая система торможения для рельсового транспортного средства с тормозами (5) с по меньшей мере одной накладкой или с по меньшей мере одним башмаком, содержащая:
- корпус (2; 102);
- систему (4) тормозных рычагов, выполненную с возможностью воздействовать по меньшей мере на один тормоз с по меньшей мере одной накладкой или с по меньшей мере одним башмаком;
- рабочий тормоз (6; 106), содержащий тормозной поршень (8; 108), подвижный относительно корпуса (2; 102) для воздействия на систему (4) тормозных рычагов и ограничивающий вместе с корпусом (2; 102) камеру (13; 113) давления рабочего тормоза, выполненную с возможностью питания от первого источника пневматического рабочего тела для перевода тормозного поршня (8; 108) в положение рабочего торможения; и
- стояночный тормоз (7; 107), выполненный с возможностью воздействия на тормозной поршень (8; 108) рабочего тормоза (6; 106) и с возможностью принимать рабочую конфигурацию и конфигурацию покоя;
при этом рельсовая система (1) торможения отличается тем, что стояночный тормоз (7; 107) содержит:
- устройство (20; 120) блокировки, подвижное относительно корпуса (2; 102) и выполненное с возможностью приема первого положения и второго положения, в котором устройство (20; 120) блокировки выполнено с возможностью блокировки тормозного поршня (8; 108) в рабочем положении торможения, при этом стояночный тормоз (7; 107) находится в рабочей конфигурации;
- устройство (23, 24; 123, 124) управления, подвижное относительно корпуса (2; 102) и выполненное с возможностью принимать положение блокировки, в котором устройство (23, 24; 123, 124) управления выполнено с возможностью удержания устройства (20; 120) блокировки в его втором положении;
при этом рельсовая система (1) торможения выполнена таким образом, чтобы, когда устройство (23, 24; 123, 124) управления находится в своем положении блокировки, камера (13; 113) давления рабочего тормоза имела возможность запитки от второго источника пневматического рабочего тела, значение давления которого задано таким образом, чтобы, когда стояночный тормоз (7; 107) находится в рабочей конфигурации, прикладывать заданное усилие торможения;
при этом рельсовая система (1) торможения дополнительно содержит блок (3) контроля и управления, выполненный с возможностью:
- принимать информацию, характеризующую значение первого источника пневматического рабочего тела;
- обрабатывать информацию, характеризующую заданное значение стояночного тормоза по меньшей мере в его рабочей конфигурации, для приведения в действие подвижного устройства (23, 24; 123, 124) управления по меньшей мере в его положении блокировки; и
- определять значение второго источника пневматического рабочего тела в зависимости от заданного значения стояночного тормоза и от информации, характеризующей значение первого источника пневматического рабочего тела, для запитки камеры (13; 113) давления рабочего тормоза.
2. Система по п. 1, отличающаяся тем, что информация, характеризующая значение первого источника пневматического рабочего тела, и информация, характеризующая заданное значение стояночного тормоза, соответствуют каждая электрическому или пневматическому или механическому сигналу.
3. Система по одному из пп. 1 и 2, отличающаяся тем, что устройство (23, 24) управления ограничивает вместе с корпусом (2) камеру (25) давления стояночного тормоза, выполненную с возможностью запитки от третьего источника пневматического рабочего тела, при этом блок (3) контроля и управления выполнен также с возможностью определения значения третьего источника рабочего тела в зависимости от заданного значения стояночного тормоза для приведения в действие подвижного устройства (23, 24) управления по меньшей мере в его положении блокировки.
4. Система по одному из пп. 1 и 2, отличающаяся тем, что устройство (123, 124) управления выполнено с возможностью своего приведения в действие посредством электрической энергии, при этом блок контроля и управления выполнен также с возможностью значения электрической энергии в зависимости от заданного значения стояночного тормоза для приведения в действие подвижного устройства (123, 124) управления по меньшей мере в его положении блокировки.
5. Система по любому из пп. 1-4, отличающаяся тем, что упомянутое определенное значение давления упомянутого второго источника пневматического рабочего тела превышает, равно или меньше значения упомянутого первого источника пневматического рабочего тела, чтобы прикладывать, когда упомянутый стояночный тормоз (7; 107) находится в рабочей конфигурации, усилие торможения, соответственно превышающее, равное или меньшее усилия торможения, прикладываемого, когда упомянутый тормозной поршень (8; 108) находится в своем положении рабочего торможения и когда упомянутый стояночный тормоз (7; 107) находится в своей конфигурации покоя.
6. Система по любому из пп. 1-5, отличающаяся тем, что упомянутый блок (3) контроля и управления выполнен также с возможностью определения скорректированного значения упомянутого первого источника пневматического рабочего тела и упомянутое определенное значение упомянутого второго источника пневматического рабочего тела равно упомянутому скорректированному значению.
7. Система по любому из пп. 1-6, отличающаяся тем, что упомянутое определенное значение упомянутого второго источника пневматического рабочего тела является постоянным или меняется в зависимости от упомянутой полученной информации, характеризующей упомянутое значение упомянутого первого источника пневматического рабочего тела.
8. Система по любому из пп. 1-7, отличающаяся тем, что упомянутый блок (3) контроля и управления выполнен также с возможностью получать информацию, характеризующую заданное значение рабочего тормоза, и определять упомянутое заданное значение стояночного тормоза в зависимости от упомянутой полученной информации, характеризующей упомянутое заданное значение рабочего тормоза.
9. Система по любому из пп. 1-8, отличающаяся тем, что упомянутый блок (3) контроля и управления выполнен также с возможностью получения по меньшей мере одной информации, характеризующей по меньшей мере один параметр использования упомянутого рельсового транспортного средства, и упомянутое значение упомянутого второго источника пневматического рабочего тела определяют также в зависимости от упомянутой по меньшей мере одной информации, характеризующей упомянутый по меньшей мере один параметр использования упомянутого рельсового транспортного средства.
10. Система по любому из пп. 1-9, отличающаяся тем, что упомянутый блок (3) контроля и управления выполнен также с возможностью получения по меньшей мере одной информации, характеризующей по меньшей мере один параметр использования упомянутого рельсового транспортного средства, и определения упомянутого заданного значения стояночного тормоза в зависимости от упомянутой по меньшей мере одной информации, характеризующей упомянутый по меньшей мере один параметр использования упомянутого рельсового транспортного средства.
11. Система по одному из пп. 9 и 10, отличающаяся тем, что упомянутый по меньшей мере один параметр использования упомянутого рельсового транспортного средства выбирают среди параметра тяги, параметра скорости, параметра нагрузки, параметра антизаклинивания, параметра пневматического давления и параметра электрической энергии.
12. Система по любому из пп. 1-11, отличающаяся тем, что упомянутый блок (3) контроля и управления гидравлически сообщается с сетью пневматических трубопроводов (70), при этом упомянутая сеть содержит главный трубопровод и общий трубопровод, выполненные с возможностью транспортировки текучей среды по меньшей мере под первым заранее определенным давлением, факультативно первый вспомогательный резервуар (74), выполненный с возможностью хранения текучей среды под вторым заранее определенным давлением и соединенный с упомянутым главным трубопроводом, и/или факультативно второй вспомогательный резервуар (75), выполненный с возможностью хранения текучей среды под третьим заранее определенным давлением и соединенный с упомянутым главным трубопроводом.
13. Система по п. 12, отличающаяся тем, что упомянутая сеть пневматических трубопроводов дополнительно содержит первый трубопровод (72) питания, подсоединенный между упомянутым блоком (3) контроля и управления и упомянутой камерой давления рабочего тормоза и выполненный с возможностью транспортировки текучей среды под давлением, поступающей по меньшей мере из одного среди первого и второго источников пневматического рабочего тела.
14. Система по пп. 3 и 12, отличающаяся тем, что упомянутая сеть пневматических трубопроводов дополнительно содержит второй трубопровод (71) питания, подсоединенный между упомянутым блоком контроля и управления и упомянутой камерой давления стояночного тормоза и выполненный с возможностью транспортировки текучей среды под давлением, поступающей из третьего источника пневматического рабочего тела.
15. Система по одному из пп. 13 и 14, отличающаяся тем, что упомянутая сеть пневматических трубопроводов дополнительно содержит специальный промежуточный трубопровод (73), выполненный с возможностью транспортировки только текучей среды, поступающей из упомянутого второго источника пневматического рабочего тела, когда упомянутый стояночный тормоз находится в рабочей конфигурации, в упомянутую камеру давления рабочего тормоза.
16. Система по п. 15, отличающаяся тем, что упомянутый блок (3) контроля и управления выполнен с возможностью питания упомянутой камеры давления рабочего тормоза через упомянутый специальный промежуточный трубопровод (73) в обход упомянутого первого трубопровода (72) питания.
17. Система по любому из пп. 1-16, отличающаяся тем, что упомянутый блок (3) контроля и управления содержит релейное устройство (90), выполненное с возможностью получать на входе упомянутого релейного устройства (90) контрольное значение упомянутого первого источника пневматического рабочего тела и с возможностью генерировать и выдавать на выходе упомянутого релейного устройства (90) упомянутое значение упомянутого первого источника пневматического рабочего тела; и упомянутый блок (3) контроля и управления выполнен также с возможностью получать на выходе упомянутого релейного устройства (90) промежуточное значение упомянутого второго источника пневматического рабочего тела, которое заменяет или добавляется к упомянутому значению упомянутого первого источника пневматического рабочего тела для генерирования упомянутого определенного значения упомянутого второго источника пневматического рабочего тела.
18. Система по любому из пп. 1-16, отличающаяся тем, что упомянутый блок (3) контроля и управления содержит релейное устройство (90), выполненное с возможностью получать на входе упомянутого релейного устройства (90) контрольное значение упомянутого первого источника пневматического рабочего тела и контрольное значение упомянутого второго источника пневматического рабочего тела, которое заменяет или добавляется к упомянутому контрольному значению упомянутого первого источника пневматического рабочего тела, и с возможностью генерировать и выдавать на выходе упомянутого релейного устройства (90) упомянутое определенное значение упомянутого второго источника пневматического рабочего тела.
19. Система по любому из пп. 1-16, отличающаяся тем, что упомянутый блок (3) контроля и управления содержит релейное устройство (90), выполненное с возможностью:
- получать на входе упомянутого релейного устройства (90) контрольное значение упомянутого первого источника пневматического рабочего тела;
- получать в упомянутом релейном устройстве (90) промежуточное значение или контрольное значение упомянутого второго источника пневматического рабочего тела; и
- генерировать и выдавать на выходе упомянутого релейного устройства (90) упомянутое определенное значение упомянутого второго источника пневматического рабочего тела.
20. Система по любому из пп. 1-19, отличающаяся тем, что упомянутый блок (3) контроля и управления содержит устройство (92) антизаклинивания и упомянутый блок (3) контроля и управления выполнен с возможностью генерировать упомянутое определенное значение упомянутого второго источника пневматического рабочего тела на основании упомянутого значения упомянутого первого источника пневматического рабочего тела и промежуточного значения упомянутого второго источника пневматического рабочего тела, которое заменяет или добавляется к упомянутому значению упомянутого первого источника пневматического рабочего тела; либо на выходе, либо на входе упомянутого устройства (92) антизаклинивания.
21. Система по любому из пп. 1-20, отличающаяся тем, что упомянутый блок (3) контроля и управления дополнительно содержит устройство (94) генерирования значения упомянутого первого источника пневматического рабочего тела, выполненное с возможностью получать на входе упомянутого устройства (94) генерирования заданное значение рабочего тормоза и с возможностью генерировать и выдавать на выходе упомянутого устройства (94) генерирования упомянутое значение упомянутого первого источника пневматического рабочего тела; и упомянутый блок (3) контроля и управления выполнен также с возможностью получать на выходе упомянутого устройства (94) генерирования промежуточное значение упомянутого второго источника пневматического рабочего тела, которое заменяет или добавляется к упомянутому значению упомянутого первого источника пневматического рабочего тела для генерирования упомянутого определенного значения упомянутого второго источника пневматического рабочего тела.
22. Система по любому из пп. 1-20, отличающаяся тем, что упомянутый блок (3) контроля и управления дополнительно содержит устройство (94) генерирования значения упомянутого первого источника пневматического рабочего тела, выполненное с возможностью получать на входе упомянутого устройства (94) генерирования заданное значение рабочего тормоза и заданное значение стояночного тормоза, которое заменяет или добавляется к упомянутому заданному значению рабочего тормоза, и с возможностью генерировать и выдавать на выходе упомянутого устройства (94) генерирования упомянутое определенное значение упомянутого второго источника пневматического рабочего тела.
23. Система по любому из пп. 1-20, отличающаяся тем, что упомянутый блок (3) контроля и управления содержит устройство (94) генерирования значения упомянутого первого источника пневматического рабочего тела, выполненное с возможностью:
- получать на входе упомянутого устройства (94) генерирования заданное значение рабочего тормоза;
- получать в упомянутом устройстве (94) генерирования заданное значение стояночного тормоза или промежуточное значение упомянутого второго источника пневматического рабочего тела; и
- генерировать и выдавать на выходе упомянутого устройства (94) генерирования упомянутое определенное значение упомянутого второго источника пневматического рабочего тела.
24. Система по любому из пп. 1-23, отличающаяся тем, что упомянутый блок контроля (3) и управления выполнен также с возможностью:
- получать по меньшей мере одну информацию, характеризующую параметр нагрузки упомянутого транспортного средства;
- определять параметр условной нагрузки упомянутого транспортного средства в зависимости от упомянутого заданного значения стояночного тормоза и/или от упомянутого определенного значения упомянутого второго источника пневматического рабочего тела; и
- заменять упомянутый полученный параметр нагрузки упомянутым определенным параметром условной нагрузки.
25. Способ торможения рельсового транспортного средства, содержащего рельсовую систему (1) торможения по любому из пп. 1-24, содержащий:
- этап получения информации, характеризующей значение упомянутого первого источника пневматического рабочего тела;
- этап питания камеры (13; 113) давления рабочего тормоза упомянутой системы (1) с упомянутым значением упомянутого первого источника пневматического рабочего тела таким образом, чтобы перевести (8; 108) упомянутый тормозной поршень в положение рабочего торможения;
- этап обработки информации, характеризующей заданное значение стояночного тормоза по меньшей мере в его рабочей конфигурации;
- этап приведения в действие подвижного устройства (23, 24; 123, 124) управления по меньшей мере в его положении блокировки в зависимости от заданного значения стояночного тормоза; и
- этап определения значения упомянутого второго источника пневматического рабочего тела в зависимости от упомянутого заданного значения стояночного тормоза и от упомянутой информации, характеризующей значение упомянутого первого источника пневматического рабочего тела, с целью питания упомянутой камеры (13; 113) давления рабочего тормоза.
26. Способ по п. 25, отличающийся тем, что дополнительно содержит этап питания упомянутой камеры (13; 113) давления рабочего тормоза с упомянутым значением упомянутого второго источника пневматического рабочего тела; и этап опорожнения упомянутой камеры (13; 113) давления рабочего тормоза.
| 1996 |
|
RU2154040C2 | |
| WO 9415821 A1, 21.07.1994 | |||
| US 3874747 A, 01.04.1975 | |||
| СПОСОБ ДЕЙСТВИЯ СТОЯНОЧНОГО ТОРМОЗА | 2011 |
|
RU2457126C1 |

