Изобретение относится к области транспортных средств и может быть использовано как транспортное средство для перевозки людей и грузов в условиях бездорожья и по водным средам.
Известен ряд технических транспортирующих устройств с техническими признаками аналогичного назначения, в том числе содержащие технологический корпус, поворотные цилиндрические обечайки - колеса с торцевыми опорными круговыми стенками, или радиальными спицами. Эти транспортирующие устройства имеют сложную конструкцию, приводятся в движение мощными двигательными агрегатами, со сложными трансмиссиями, не могут достаточно эффективно перемещаться по водным поверхностям, по бездорожью, требуют для перемещения существенных энергозатрат и т.д., т.е. имеют недостатки не позволяющие реализовать решения достигаемые в заявляемом изобретении. [1]
Другой аналог [2]. Приложение 2 рис. 1 - рисунок опубликовал журнал «Попьюлар Сайнс» в сентябре 1933 года.
Данное транспортирующее устройство содержащее корпус с сиденьями, поворотные круговые обечайки-колеса закрепленные в корпусе соосно на общей оси. Обечайки поворачиваются синхронно за счет бегущих по их внутренней поверхности животных. Данное устройство движется за счет суммарной силы тяги от двух животных, а управление направление движения осуществляется дополнительным рулевым колесом. Такая компоновка не позволяет успешно маневрировать, в том числе осуществлять разворот на месте, так как колеса имею соединяющий их вал суммирующий мощности тяги колес. Хотя Можно тормозить простыми средствами. Однако, при более скоростных и мощных, чем животные автономных движителях и тормозить без остановки движителей - т.е. вывод их из зацепления с внутренней поверхностью обечаек невозможно. Но даже, если дистанционно отключить привода мощных автономных движителей, то они начнут беспорядочно двигаться вместе с поверхностью обечайки имеющей направление движения обратное движению самого транспортирующего устройства, что создаст аварийную ситуацию.
Наиболее близким к заявленному изобретению устройством того же назначения по совокупности признаков является *пароход* рис. 1 [3] принято за прототип.
Данное устройство содержит технологический корпус - пароход, поворотные круговые обечайки с торцевыми опорными круговыми стенками, опорные оси закрепленные в узлах крепления на корпусе. Поворотные Обечайки снабжены лопастями отталкивающимися при повороте от опорной водной поверхности, а поворот самих обечаек вокруг оси осуществляется в результате взаимодействия с размещенным на внутренней поверхности обечайки блока автономного движителя в виде паровозика.
Причинам препятствующим достижению указанного ниже технического результата при использовании описанного известного устройства принятого за прототип является то, что в известном устройстве обечайки - колеса не имеют конструктивной возможности, при движении блока автономного движителя, управлять направлением движения корпуса, а положение в пространстве автономного движителя в виде паровозика неуправляемо, что может привести к аварии при, например внезапном торможении, что ухудшает надежность функционирования не дает возможности обеспечить безопасность. Кроме того, цилиндрическая обечайка имеет излишний по величине габарит (по ширине корпуса), что требует расхода материалов на создание оптимально прочной конструкции, делает ее тяжелой и поэтому снижается полезная грузоподъемность устройства, а при реализации функции движении объекта по суше потребуется еще более усилить прочность конструкции и, следовательно, увеличить ее вес и потребует еще большего расхода энергоресурсов на более мощные автономные движители.
РАСКРЫТИЕ СУЩНОСТИ (сведения о совокупных существенных признаках). Цели заявляемого изобретения заключаются в следующем - задача на решение которой направлено заявляемое изобретение это создание устройства с расширенными технологическими возможностями с обеспечением надежного и оперативного управления автономными движителями для обеспечения требуемых изменений скорости, поворотов и маневрирования при транспортировании.
Указанные технические цели-результаты при осуществлении изобретения достигаются тем, что в заявляемом транспортирующем устройстве содержащем технологический корпус, приводные и неприводные поворотные круговые обечайки на которых закреплены торцевые стенки с опорными узлами в виде подшипниковых втулок в которых одним концом размещены опорные оси приводных обечаек, а противоположные концы осей установлены в опорных узлах крепления в технологическом корпусе, причем в полости между торцевыми стенками приводных колес обечаек внутренняя поверхность обечаек выполнена с возможностью самоходно опорного перемещения блоков автономных движителей. Предлагаемое транспортирующее устройство обладает следующими существенными отличительными признаками: на участках опорных осей между подшипниковыми втулками приводных колес обечаек установлены устройства управления радиальной фиксацией блоков автономных движителей, а подшипниковые втулки опорных узлов обечаек установлены с обеспечением возможности автономного вращения приводных обечаек вокруг опорных осей противоположные концы которых установлены в опорных узлах крепления осей в технологическом корпусе с возможностью поворотов, или закреплены жестко. При этом Установка устройств управления радиальной фиксацией блоков автономных движителей обеспечивает надежность работы, так как при включении устройств торможения, или уменьшении скорости блок автономного движителя в полости обечайки радиально перемещается и выводится из взаимодействия с продолжающей движение внутренней поверхностью обечайки. Возможность автономных поворотов обечаек обеспечивает маневренность транспортирующего устройства за счет разницы скоростей, или даже направлений вращения обечаек расположенных с противоположных сторон технологического корпуса.
Выполнение в осях приводных обечаек осевой полости соединяющей технологический корпус с полостью между торцевыми стенками приводных обечаек обеспечивает расширения технологических возможностей управления блоками автономных движителей (далее АД) путем прокладки электрических питающих и управляющих кабелей, или гидравлических трубопроводов, для механических управляющих трансмиссий, а также обеспечении технологических проходов для оперативных ремонтов и т.п. Кроме того оси колес обечаек, закрепленные в узлах крепления в технологическом корпусе, могут быть размещены в пространстве несоосно между собой для обеспечения устойчивого положения транспортирующего устройства при его исполнении из двух приводных обечаек, также для ввода-вывода автономных движителей -АД в торцевых стенках выполнены проемы, или в цилиндрической обечайке ворота с полотнами ворот фиксируемыми как часть внутренней поверхности обечаек-колес, а устройства управления радиальной фиксацией блоков автономных движителей выполнены в виде приводных шарнирно звеньевых, или телескопических силовых, винтовых, цепных и т.п. механизмов.
Использование предлагаемого Транспортирующего устройства обеспечивает широкие возможности в областях транспортирования грузов и людей, открывает перспективы и решает при достижении технических результатов следующие ТЕХНИЧЕСКИЕ ПРОБЛЕМЫ: обеспечивает надежное транспортирование по бездорожью с обеспечением высокой грузоподъемности, преодоление водных и болотистых акваторий при существенно меньших затратах энергоресурсов. Обеспечивается реализация других функциональных возможностей, в том числе упрощение решений конструктивного устройства, обеспечение меньшего удельного давления на грунты, при высокой грузоподьемности и т.д. Передвижение в бездорожье тайга, болото - амфибийный вариант, возможна расчистка (как строительство) трассы движения используя спец агрегаты размещаемые на корпусе самого транспортирующего устройства. Появляется возможность Тушение пожаров в условиях бездорожья с обеспечением расходными материалами (ввиду высокой грузоподъемности) и средствами безопасности, создание Баз промысловиков и т.п. При этом обеспечивается прохождение, в том числе с различным тяжелым оборудованием, например буровым станком и т.п. по болотам, мелколесью, тундре, пустыне и т.п. территориям не оборудованным приемлемыми дорогами. Можно с таким транспортом выделить, с существенно меньшими затратами, отдельно грузовые дороги от дорог общего пользования, что снизит аварийность и позволит увеличить скорости движения без ущерба для безопасности.
Рализация таких функциональных возможностей определяется следующими свойствами заявляемого транспортного устройства. При наличии в устройстве цилиндрических обечаек колес большого диаметра и ширины, во первых существенно снижается сопротивление качению колес, во вторых вращение колес осуществляется передвижением блоков автономных движителей - АД по внутренней поверхности обечайки и не требует строительства дорогих и влияющих на экологию дорог, причем сами АД эксплуатируются в благоприятных условиях. Фактически у объекта изобретения... имеется своя дорога в любом направлении. Можно просто расчистить выравниванием направление на местности. При этом высокая транспортирующая тяга обеспечивается не столько мощностью автономного движителя, но и его весом и геометрическими параметрами самого Транспортирующего устройства. Соответственно, при хорошей горизонтальной дороге снижаются энергозатраты на движение, т.е. расход ГСМ и т.п. Более того, ввиду меньшего сопротивления перекатыванию обечаек снижается потребная мощность АД при передвижении по бездорожью. Очевидно существенное повышении проходимости, ибо колесо обечайка движется тягой образующейся при выкатывании автономного движителя путем проезда по обечайке и нет трансмиссии с ограничивающими свойствами конструктивных материалов моментами сил. В качестве самих Автономных Движителей могут использоваться любые колесные и даже гусеничные агрегаты уже серийно выпускаемые и надежные, а их замена легко и быстро может быть произведена. Ввиду использования таких надежных полнокомплектных АД полностью отпадает необходимость в разработке оригинальных трансмиссий, которые и сложны и тяжелы и габаритны и дороги и требуют качественных материалов и конструкторских разработок и т.д. и т.п.
Торможение движения осуществляется путем торможения движения автономных движителей, а также торможением фрикционными тормозными устройствами, либо тормозными, гидромуфтами (не показаны на чертежах) и т.п. известными устройствами. Большие размеры колес при герметичном исполнении их обечаек и со сплошными герметичными торцевыми стенками даже на половину радиуса обеспечивают возможность амфибийного движения, а при радиусах обечаек в десятки метров водоизмещение только от герметичных обечаек колес может составить сотни тонн, не считая водоизмещения самого корпуса. При этом конструкция технологического корпуса транспортирующего устройства существенно упрощается в изготовлении и эксплуатации. При проектировании технологического корпуса и упруго гасящих подвесок колес обечаек проявляются пути новых технологических возможностей, а оснащение Транспортирующего устройства технологическим оборудованием, энергоустановками, помещениями и т.д. и т.п. существенно упрощается, удешевляется, ускоряется. Управление механическими АД осуществляется в большинстве случаев дистанционно, в том числе по радиосвязи. При эксплуатации Транспортирующего Устройства без механических АД, а например с лошадью, собакой, человеком, оленем и т.д. вопросы управления решаются простой тренировкой и соответствующими специальными видами упряжи-подвески. Также с помощью установленных и закрепленных устройств управления радиальной фиксацией обеспечивается подвижно управляемое фиксирующее крепление блоков автономных движителей в полостях обечаек для управления фрикционным (и прочими видами) сцеплением автономных движителей с внутренней поверхностью обечайки и функциональным положением автономных движителей в пространстве относительно оси обечаек. Конструктивное выполнение устройств управления радиальной фиксацией блоков АД возможно в различных вариантах - например в виде приводных шарнирно звеньевых, или телескопических силовых, винтовых, цепных и т.п. механизмов.
Также выполнение осей обечаек несоосно позволяет обеспечить равновесие всего транспортирующего устройства особенно при двухколесной схеме и соответственно упростить всю конструкцию (без подпорного колеса). Кроме того открывается перспектива выполнения обечаек колес с наклонными осями, что расширит технологические возможности. Для ввода-вывода автономных движителей в полости обечаек колес в зависимости от типоразмера и технических характеристик могут быть выполнены проемы (в т.ч. закрываемые). Например для ввода, установки и закрепления АД в виде мотоблоков, колес Дуюнова, или самого человека, или собачьей упряжки и т.п. делаются проемы в торцевых стенках. Если в качестве АД используется, например, трактор К-150 и т.п. проемы ворот выполняются в цилиндрической обечайке, а полотна ворот выполняются откидными и фиксируемыми как часть внутренней поверхности обечаек-колес.
ТАКИМ ОБРАЗОМ в заявляемом транспортном устройстве изобретении решение указанной задачи достигнуто за счет того, что в транспортирующем устройстве на участках опорных осей между подшипниковыми втулками приводных колес обечаек установлены устройства управления радиальной фиксацией блоков автономных движителей, а подшипниковые втулки опорных узлов обечаек установлены с обеспечением возможности автономного вращения приводных обечаек вокруг опорных осей противоположные концы которых установлены в опорных узлах крепления осей в технологическом корпусе с возможностью поворотов, или закреплены жестко
Также для решения задач в изобретении устройства управления радиальной фиксацией выполнены в виде приводных шарнирно звеньевых, или телескопических силовых, винтовых, цепных и т.п. механизмов и т.п механизмов, оси приводных обечаек выполнены с осевой полостью соединяющей технологический корпус с полостью между торцевыми стенками приводных обечаек, а оси приводных обечаек размещены в пространстве несоосно между собой и в торцевых стенках, или в поверхности приводных обечаек выполнены закрываемые и фиксируемые при закрытии полотнами ворот технологические проемы для ввода-вывода блоков автономных движителей.
Таким образом предлагаемое транспортирующее устройство способно надежно работать в условиях бездорожья в Арктике и Антарктике, в тундре, в саванне, в условиях песков пустынь, в заболоченных местностях, в ареалах наводнений, в мелко и средне лесистой местности без существенного повреждения почвы и экосферы. Причем во многих случаях возможно эффективное применение устройства без энергодвигательных установок на исключительно мускульной тяге как животных (собак, оленей, лошадей и т.п.) так и человека, что перспективно в труднодоступных, отдаленных от баз снабжения местностях, например а Арктике, Антарктике и т.п, причем со скоростью и 10 и 40 км. в час и более. При этом реализуется высокая проходимостью и, в том числе, с обеспечением значительной тяги и соответственно существенной транспортной грузоподъемностью и амфибийностью при низких удельных энергозатратах. В то же время устройство просто в изготовлении и эксплуатации, оно существенно ремонтопригодно, ибо не имеет например трансмиссий. Автономные движители можно просто заменять. Открыл ворота и выкатил-закатил и т.п. Реальна перспективная возможность организации несложных производств и быстрой реализации объекта изобретения по малобюджетным ценам, что даст существенный социальный эффект. Кроме того перспективно применение заявляемого технического решения в специальных сферах производства, например в работе МЧС при пожарах, наводнениях и т.д. Перспективно применение изобретения и во многих других, в т.ч. специальных сферах.
Проведенный заявителем анализ конструкций устройств, включающий поиск по патентным и научно техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения позволяет установить, что заявитель не обнаружил аналог характеризующийся совокупными признаками тождественными существенными признакам заявляемого изобретения. Определение из аналогов прототипа как наиболее близкого по совокупности признаков аналога позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату, отличительных признаков в заявленном устройстве, изложенных в формуле изобретения. Следовательно, заявленное техническое решение соответствует условию"новизна".
Для проверки соответствия заявленного изобретения условию "изобретательский уровень" заявитель провел дополнительный поиск известных решений чтобы выявить признаки совпадающие с отличительными от прототипа признакам. Результаты поиска показали, что совокупность существенных признаков в заявленном изобретении не вытекает для специалиста явным образом из известного уровня техники т.к. из последнего не выявлено влияние предписываемых заявленным решением преобразований характеризуемых отличительными от прототипа существенным признакам, на достижение технического результата, что позволяет сделать вывод о соответствии заявляемого изобретение как технического решения критериальному условию - изобретательский уровень.
На прилагаемых графических материалах изображено:
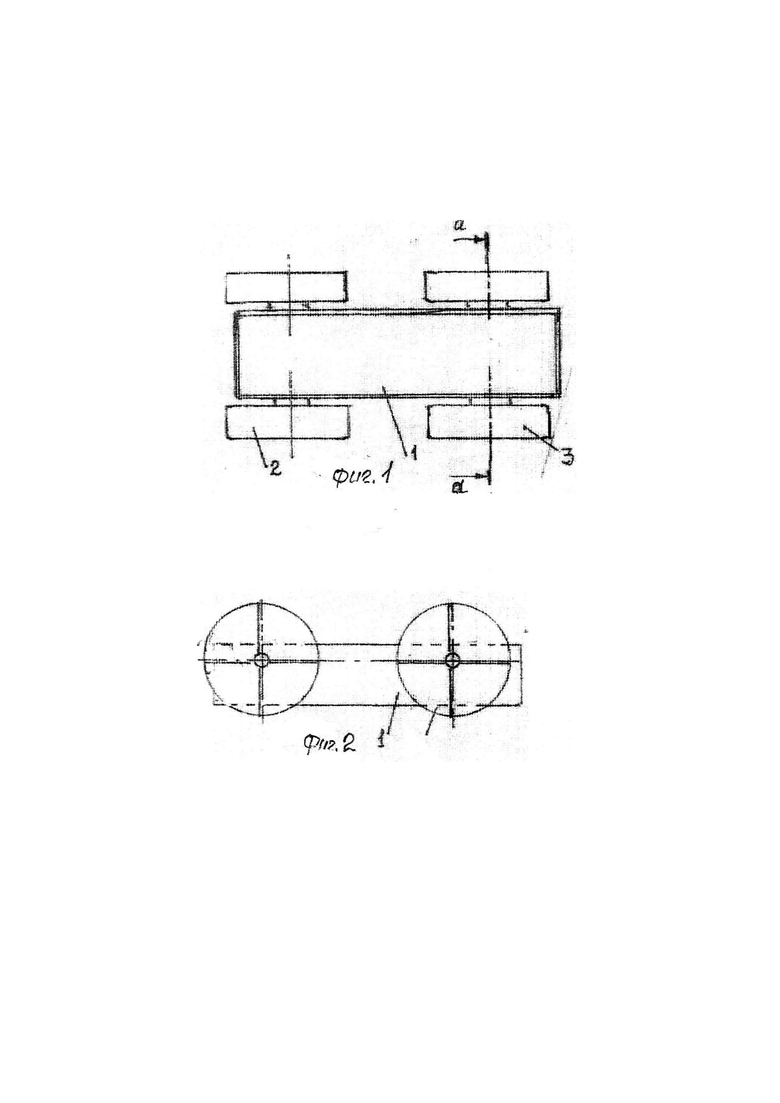
на фиг. 1 транспортирующее устройство на вариант колесной компоновки-1 - вид сверху
На фиг. 2 транспортирующее устройство вариант колесной компоновки 1 - вид сбоку
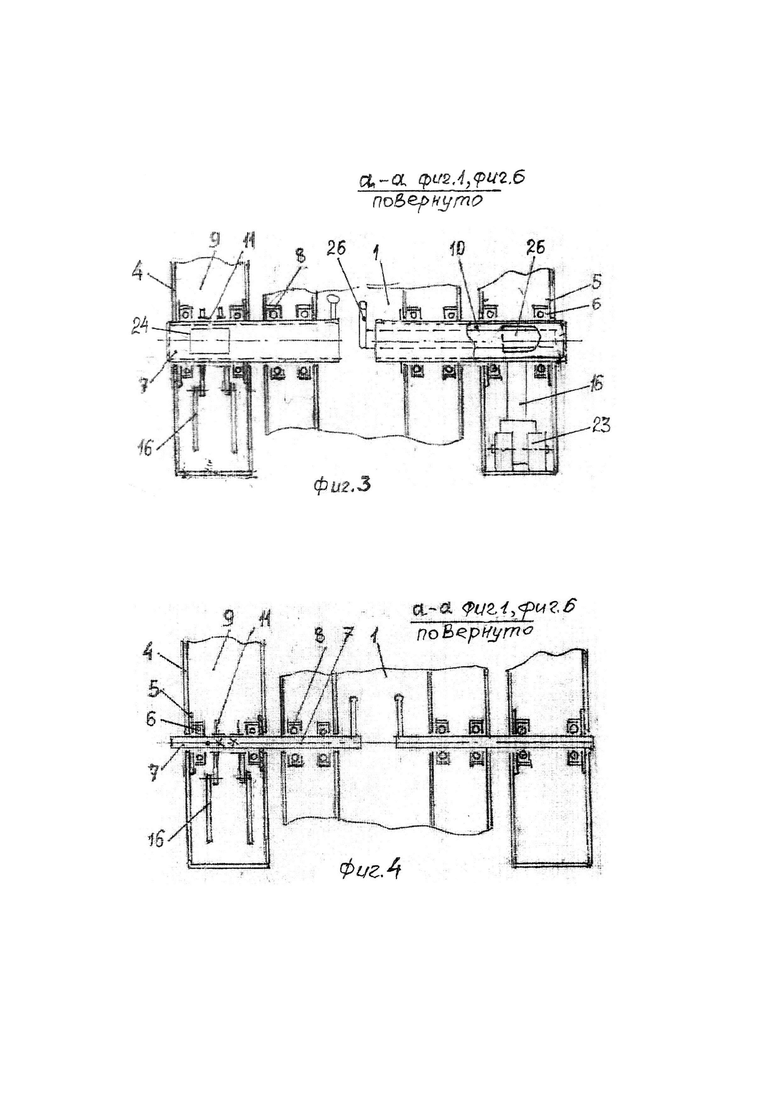
на фиг. 3 поперечное сечение а-а фиг. 1, фиг. 6 - вариант - оси с полостью
на фиг. 4 - поперечное сечение а-а фиг. 1, фиг. 6 вариант - оси сплошные
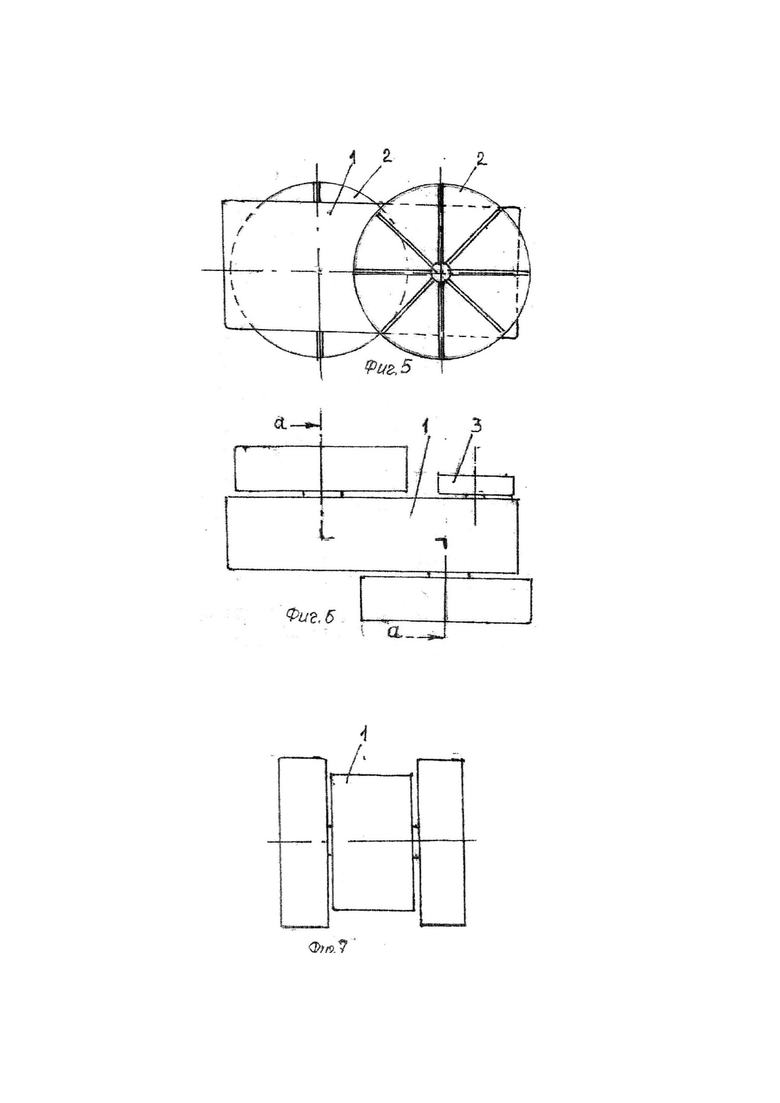
на фиг. 5 транспортирующее устройство - вариант колесной компоновки - 2 - вид сбоку;
на фиг. 6 транспортирующее устройство вариант колесной компоновки 2 - вид сверху
на фиг. 7 транспортирующее устройство вариант колесной компоновки 2 - вид спереди
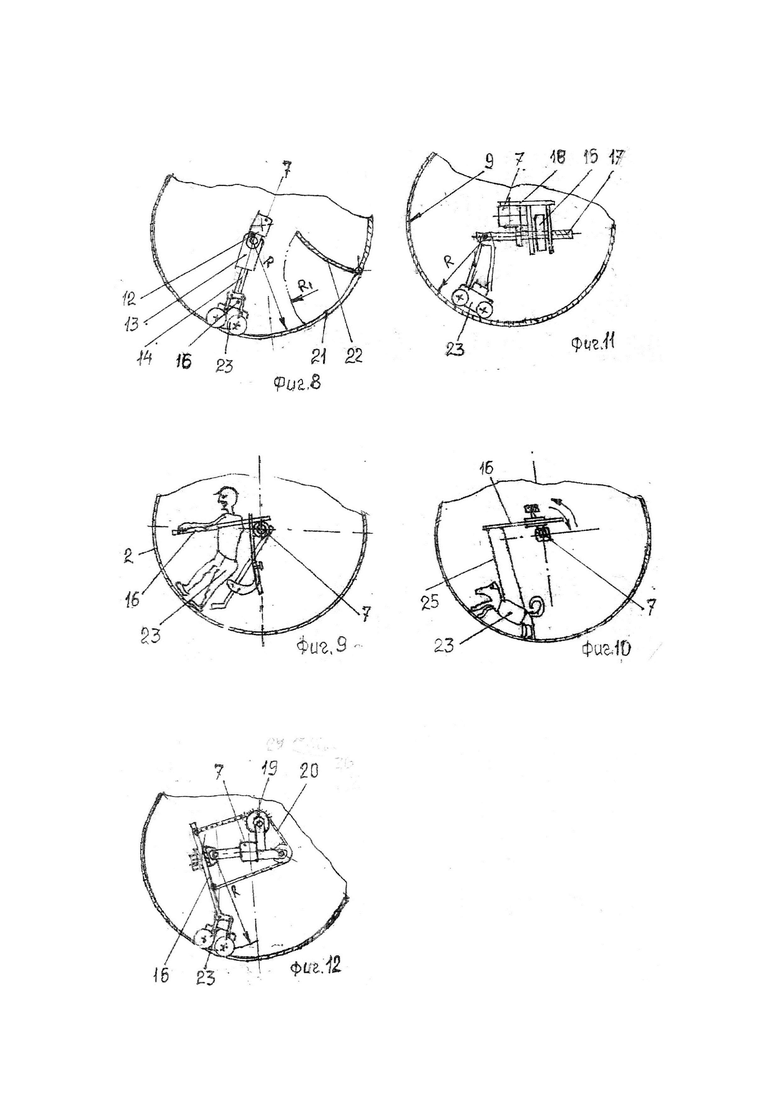
на фиг. 8 установка устройства управления радиальной фиксацией вариант 1 и проем для ввода автономного движителя с откидываемым полотном ворот
на фиг. 9 установка устройства управления радиальной фиксацией мускульного автономного движителя - вариант
на фиг. 10 установка устройства управления радиальной фиксацией мускульного автономного движителя на гибких элементах - вариант
на фиг. 11 установка устройства управления радиальной фиксацией блока автономного движителя - вариант 2.
на фиг. 12 установка устройства управления радиальной фиксацией блока автономного движителя - вариант 3.
На графических материалах приняты следующие обозначения: 1 - корпус технологический; 2 - приводные цилиндрические обечайки; 3 - неприводные цилиндрические обечайки; 4 - торцевые стенки; 5 - опорные осевые втулки; 6 - подшипниковые узлы; 7 - оси обечаек; 8 - узлы крепления осей в технологическом корпусе; 9 - внутренняя поверхность обечаек; 10 - полости в осях 7; 11 - опорные подлокотники; 12 - шарнир крепления цилиндра; 13 - цилиндр силовой; 14 - шток силового цилиндра; 15 - гайка приводная; 16 - устройство управления радиальной фиксацией автономного движителя; 17-винт перемещения; 18 - кронштейн крепления привода гайки приводной; 19 - звездочка цепного привода; 20 - цепь приводная; 21 - проем для ввода - вовнутрь обечайки и вывода автономных движителей; 22 - откидываемое полотно ворот; 23 - автономный движитель; 24 - окно проем на стенке оси 7 из полости 10; 25 - элементы гибкой подвески автономного движителя; 26 - вариант трансмиссии передачи на кронштейн управления радиальной фиксацией автономного движителя в виде животного на гибкой подвеске.
Сведения подтверждающие возможность осуществления изобретения с получением вышеуказанного технического и прочего результата заключаются в следующем:
Транспортирующее устройство содержит технологический корпус 1, автономно поворотные колеса в виде цилиндрических обечаек приводных 2 и неприводных -3 на которых закреплены торцевые стенки 4, выполненные или в виде частей сплошных дисков, примыкающих к цилиндрической обечайке, или в виде круговых секторов связанных ребрами - спицами с опорными осевыми втулками -5 с подшипниковыми узлами 6, в которых по ширине цилиндрических колес обечаек 2, между втулок 5 одним концом размещены оси 7 обечаек, а вторые концы осей 7 закреплены в узлах крепления 8 этих осей в технологическом корпусе 1, который на эти оси опирается, причем в полостях между торцевыми стенками 4 обечаек 2 внутренняя поверхность-9 обечаек выполнена, например с кордовым, или резинотканевым и прочим настилом с возможностью самоходно опорного перемещения блоков автономных движителей 23, например в виде колесных приводных механизмов или мускульных приводов в т.ч. в виде животных. В полостях приводных колес обечаек 2 на валах 7 закреплены устройства 16 управления радиальной фиксацией блоков автономных движителей. Конструктивно - компоновочно устройства управления радиальной фиксацией могут быть различны. Например вариант на фиг. 8 в виде силового пневмо, или гидроцилиндра шарнирно закрепленного к оси 7 и штоком закрепленного к блоку автономного движителя. Другой вариант на фиг. 11 обеспечивает передачу управляющего усилия от привода (не показан) посредством передачи винт-гайка. Еще вариант передачи управляющего приводного усилия управления положением блока автономного движителя приводными цепями 20 изображен на фиг. 12. Также подвеска и управляющая радиальным положением фиксация блока автономных движителей может быть осуществлена с помощью гибких элементов, а именно ремней, тросов, веревок и т.п. как изображено на фиг. 10 и, возможно, для мелких животных управление осуществляется вручную мускульно водителем. Кроме того для ввода-вывода автономных движителей, например трактор, мотоблок и т.п. в т.ч. мускульных (например лошадь), в торцевых стенках 4, или в цилиндрических обечайках 2 в поверхности 9 выполнены проемы 21, с откидываемыми полотнами ворот 22, фиксируемыми при закрытии как часть внутренней поверхности 9 конструктива обечаек 2. Цилиндрические обечайки 2, и 3 совместно со своими торцевыми стенками-4 и опорными осевыми втулками 5 - образуют колесо. Приводное колесо-с автономным движителем, неприводное - без движителя.
Транспортирующее устройство используется и работает следующим образом. В полости обечаек 2 через боковые проемы, или проемы 21 открывающихся ворот 22 вводят и размещают, в том числе снабженные дистанционным управлением, автономные движители 23, например трактор МТЗ-82, или грузотранспортер, или мотоблок - в зависимости от типоразмера и назначения Транспортирующего устройства. Можно в качестве блока автономного движителя 23 использовать собачью упряжку, или лошадь и т.п. которых желательно закрепить на постромки 25, которые уже крепятся к управляемым например поворотом осей 7 или элементами трансмиссии 26 с кронштейнами 16 управления радиальной фиксацией. Движение технологического корпуса 1 происходит при вращении приводных обечаек 2 при движении Автономных Движителей по поверхности 9 обечайки силой трения сцепления, или даже с устройством специальных зацепов (не показаны на чертежах). Обечайка движется вращательно поступательно как самокатящееся колесо типа как беличье колесо. Причем в основном именно момент от силы веса автономного движителя создает тяговую силу, толкающую и поворачивающую обечайку 2. При этом обеспечивается существенно значительная сила тяги, на осях 7 и опорных узлах 8, толкающая корпус 1. Например если в качестве АД применен тягач весом 25 тонн, то этот тягач вкатившись по поверхности обечаек 9 на 45 градусов дает силу тяги на оси - 17,5 тонн. При этом при диаметре колеса обечайки 20 метров и ширине 2500 мм, т.е. при низком удельном давлении на поверхность пути, сопротивление качению обечайки составит порядка одной тысячной транспортируемого веса в т.ч. корпуса 1. Сила тяги обеспечит и проезд по локальным препятствия на пути и соответственно подьем по определенному уклону пути. При весе транспортируемого груза 1000 тонн сопротивление будет всего 1 тонна и, соответственно, при тяге 17.5 тонны (это только один автономный движитель весом 25 т, а их может быть и 3 шт. и весом 100 тонн и т.д.). Такая тяга вполне обеспечит ускорение движения Транспортирующего Устройства с грузом, причем с существенно высокой удельной грузоподъемностью. Горизонтальное разгоняющее ускорение, при вышеприведенных параметрах, хотя и относительно массы в 1000 т небольшое, но разгоняет корпус с грузом достаточно быстро, (да и куда спешить) если даже не применять способы и дополнительные устройства форсированного разгона (например реактивные) до необходимой приемлемой для начала транспортирования скоростью. Торможение Транспортирующего Устройства осуществляется например встроенными дисковыми фрикционными тормозами, или управляемыми гидромуфтами и т.д. (не показано). Управляемые, в том числе дистанционно, блоки автономных движителей (далее АД) при необходимости закрепляются на устройствах радиально регулируемой фиксации 16 таким образом, чтобы при аварийных нештатных ситуациях при движении автономных движителей трением сцепления с внутренней поверхностью обечайки, сами автономные движители (в сложном движении) радиально приподнимались и направлялись устройствами управления радиальной фиксации в положения выхода из зацепления их колес и т.п. с внутренней поверхностью 9 обечайки 2, т.е. как бы приподнимались над поверхностью обечайки. Причем управление положением осуществляется из кабины, находящейся в корпусе 1, водителем путем механизированного (силового или автоматизированного) управляющего поворота оси 7 обечайки, или силовых приводов кронштейнов 16. Если же ось приводной обечайки выполнить с полостью 10, то по ней можно провести средства управления в других видах, например в виде шлейфа управляющих силовыми приводами кабелей, или гидравлических шлангов и т.п. при этом энергосиловые установки располагаются на технологическом корпусе 1. Управление транспортирующим устройством осуществляется с пульта управления (не показан), или других органов управления. При ситуации поворота фактически правому и левому колесам автономно задаются разные скорости движителями вперед-назад, и вождению обучаются на практике, как на обычном автомобиле, возможна и полная автоматизация управления известными способами и устройствами.
Например разберем управление с помощью конструкции изображенной на фиг. 8. Допустим исходное положение -АД находится в нижней точке обечайки 2. Включаем привод АД вперед и немного начинаем выдвигать шток цилиндра -АД начнет выезжать по полости 9 обечайки и тяга начнет расти до начала движения. Далее если нужно снизить скорость - уменьшаем скорость движения АД или втягиваем шток цилиндра(или совместно) -АД как бы съезжает по обечайке на более низкий уровень и тяга уменьшается. Теперь если включить привод АД на задний ход и начать выдвигать шток цилиндра, то АД начнет двигаться назад и поднимаясь по обечайке выше создаст не только торможение вращения обечайки, но и вызовет вращение обечайки в противоположную сторону - это можно использовать как реверс одного из колес - обечаек при повороте и даже вплоть до разворота на месте.
Конструктивное исполнение транспортирующего устройства имеет широкий диапазон перспективных вариантов ввиду неиспользования (по имеющимся данным у заявителя) подобного решения в нынешней практике. Например (вариант использования) при конструктивных габаритах внедорожного автомобиля - длина 5 м, ширина 2.3 м, если автономный движитель весит (можно с подгрузом) 150 кг., то реальна тяга порядка 100 кг. Например если в таком транспортирующем устройстве Колесо - обечайка с торцевыми стенками выполнено диаметром 2400 мм и шириной 600 мм. Тогда, если при амфибийном использовании устройство оснащено, в том числе двумя такими приводными колесами, то при погружении на 0.5 радиуса т.е. на 600 мм получаем водоизмещение более 1.27 тонны (без учета погружаемого объема корпуса). Если при этом сам корпус весит 800 кг и полезная нагрузка 700 кг (5 человек и 300 кг груза), а два движителя весят по 150 кг. (т.е. вес в полном снаряжении-1800 кг.) И при таких колесах диаметром 2.4 м, причем амфибийных - высокая проходимость очевидна. Скорость определяется мощностью и весом используемых автономных движителей. При этом сама конструкция колеса обечайки (такого внедорожника) в сборе, например из стальных деталей (лист, трубки) весит порядка 300 кг, а если колес в других компоновках-вариантах например два, три, четыре, пять, в зависимости от назначения и т.п. то для других типоразмеров - другие соотношения и характеристики. Выполнение конструкций из современных стеклопластиков усиливает эффективность соотношений масса - грузоподъемность - водоизмещение и т.п.
Таким образом вышеизложенные сведения и описания свидетельствует о выполнении при использовании заявленного Транспортирующее устройства со следующей совокупностью существенных признаков - Транспортирующее устройство содержащее технологический корпус, приводные и неприводные поворотные круговые обечайки на которых закреплены торцевые стенки с опорными узлами в виде подшипниковых втулок в которых одним концом размещены опорные оси приводных обечаек, а противоположные концы осей установлены в опорных узлах крепления в технологическом корпусе, причем в полости между торцевыми стенками приводных колес обечаек внутренняя поверхность обечаек выполнена с возможностью самоходно опорного перемещения блоков автономных движителей отличающееся тем, что с целью повышения надежности работы, расширения технологических возможностей маневрирования и упрощения конструкции на участках опорных осей между подшипниковыми втулками приводных колес обечаек установлены устройства управления радиальной фиксацией блоков автономных движителей, подшипниковые втулки опорных узлов обечаек установлены с обеспечением возможности автономного вращения приводных обечаек вокруг опорных осей, противоположные концы которых установлены в опорных узлах крепления осей в технологическом корпусе с возможностью поворотов, или закреплены жестко.
Кроме того устройства управления радиальной фиксацией могут быть выполнены в виде шарнирно звеньевых, или прочих приводных силовых механизмов, а оси приводных обечаек выполнены с осевой полостью соединяющей технологический корпус с полостью между торцевыми стенками приводных обечаек, также оси приводных обечаек могут быть размещены в пространстве несоосно между собой, а в торцевых стенках, или в поверхности приводных обечаек выполнены закрываемые и фиксируемые при закрытии полотнами ворот технологические проемы для ввода - вывода блоков автономных движителей
Транспортирующее устройства воплощающее заявленное как изобретение техническое решение предназначено для автономной транспортировки людей и грузов с обеспечением снижения расхода энергоресурсов вплоть до обеспечения возможностей движения мускульным приводом, а также обеспечивается упрощение конструкции, высокая ремонтопригодность, бюджетная себестоимость, высокая грузоподъемность и амфибийность с повышенной надежностью и широкими технологическими возможностями.
Для заявленного транспортирующего устройства как оно охарактеризовано в независимом пункте изложенной формулы изобретения очевидна возможность изготовления с помощью известных средств и методов, а анализ отдельных функциональных применений аналогов подтверждает его работоспособность.
Транспортирующее устройство способно обеспечить достижение усматриваемого заявителем технического результата, что подтверждается принципиальной работоспособностью различных аналогов заявленного изобретения, но без новых технических эффектов, которые могут быть осуществлены при адекватном отличительным признакам формулы изобретения при изготовлении и использовании заявленного Транспортирующего устройства.
Следовательно заявленное как изобретение техническое решение соответствует критериальному условию " промышленная применимость"
ИСТОЧНИКИ принятые во внимание при экспертизе
1. ПРИЛОЖЕНИЕ 1 с рисунками аналогов изобретения.
2. ПРИЛОЖЕНИЕ 2, рис. 1 аналог изобретения
3. ПРИЛОЖЕНИЕ 3, рис. 1 - устройство корабля ближайший аналог принято за прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГАЧ ГИДРОКОЛЕСНЫЙ | 2019 |
|
RU2718628C1 |
| ЛЕГКОПРОЛЕТНОЕ СТРОЕНИЕ | 2019 |
|
RU2710915C1 |
| УСТРОЙСТВО ДЛЯ КУПАНИЯ БОЛЬНОГО | 2019 |
|
RU2705633C1 |
| Конвейер | 1988 |
|
SU1553469A1 |
| ДВИЖИТЕЛЬ ВОДОМЕТНЫЙ | 2009 |
|
RU2436706C2 |
| КОНТЕЙНЕР ДЛЯ ОТХОДОВ | 2019 |
|
RU2710113C1 |
| АППАРАТ ДЛЯ ПРОВЕДЕНИЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ И РЕМОНТНЫХ РАБОТ НА ТРУБОПРОВОДЕ ПОД ВОДОЙ | 2008 |
|
RU2381410C1 |
| ВАЛКОВАЯ ЛИСТОГИБОЧНАЯ МАШИНА | 1996 |
|
RU2113308C1 |
| Технологическая линия для транспортирования и дробления витой металлической стружки | 1982 |
|
SU1058602A1 |
| Устройство для транспортирования и переориентирования деталей | 1988 |
|
SU1530542A1 |
Изобретение относится к транспортным средствам. Транспортирующее устройство содержит технологический корпус, приводные и неприводные поворотные круговые обечайки. На обечайках закреплены торцевые стенки с опорными узлами в виде подшипниковых втулок, в которых одним концом размещены опорные оси приводных обечаек. Противоположные концы осей установлены в опорных узлах крепления в технологическом корпусе с возможностью поворотов или закреплены жестко. В полости между торцевыми стенками приводных колес обечаек внутренняя поверхность обечаек выполнена с возможностью самоходно опорного перемещения блоков автономных движителей. На участках опорных осей между подшипниковыми втулками приводных колес обечаек установлены устройства управления радиальной фиксацией блоков автономных движителей. Подшипниковые втулки опорных узлов обечаек установлены с обеспечением возможности автономного вращения приводных обечаек вокруг опорных осей. Достигается расширение функциональных возможностей. 4 з.п. ф-лы, 12 ил.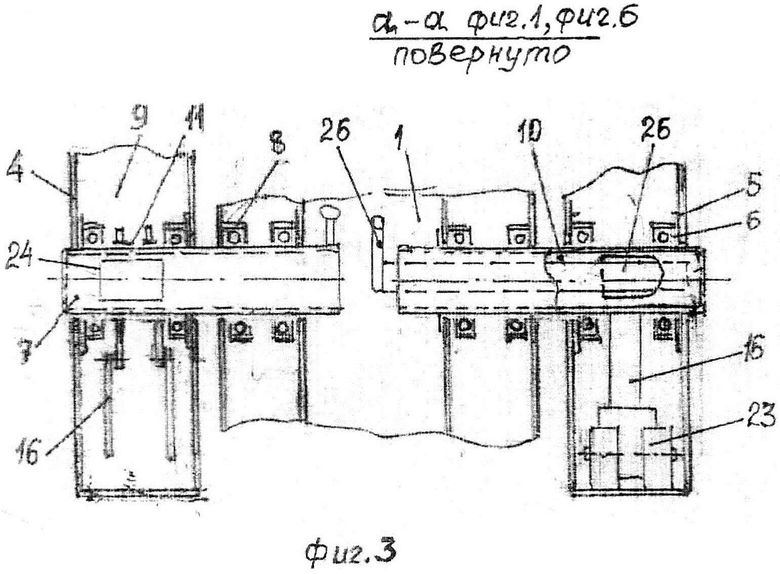
1. Транспортирующее устройство, содержащее технологический корпус, приводные и неприводные поворотные круговые обечайки, на которых закреплены торцевые стенки с опорными узлами в виде подшипниковых втулок, в которых одним концом размещены опорные оси приводных обечаек, а противоположные концы осей установлены в опорных узлах крепления в технологическом корпусе, причем в полости между торцевыми стенками приводных колес обечаек внутренняя поверхность обечаек выполнена с возможностью самоходно опорного перемещения блоков автономных движителей, отличающееся тем, что на участках опорных осей между подшипниковыми втулками приводных колес обечаек установлены устройства управления радиальной фиксацией блоков автономных движителей, а подшипниковые втулки опорных узлов обечаек установлены с обеспечением возможности автономного вращения приводных обечаек вокруг опорных осей, противоположные концы которых установлены в опорных узлах крепления осей в технологическом корпусе с возможностью поворотов или закреплены жестко.
2. Транспортирующее устройство по п. 1, отличающееся тем, что оси приводных обечаек выполнены с осевой полостью, соединяющей технологический корпус с полостью между торцевыми стенками приводных обечаек.
3. Транспортирующее устройство по п. 1, отличающееся тем, что устройства управления радиальной фиксацией выполнены в виде приводных шарнирно звеньевых или телескопических силовых, винтовых, цепных механизмов.
4. Транспортирующее устройство по п. 1, отличающееся тем, что оси приводных обечаек размещены в пространстве несоосно между собой.
5. Транспортирующее устройство по п. 1, отличающееся тем, что в торцевых стенках или в поверхности приводных обечаек выполнены закрываемые и фиксируемые при закрытии полотнами ворот технологические проемы для ввода-вывода блоков автономных движителей.
| Шарообразный танк | 1925 |
|
SU13013A1 |
| ПЛАВАТЕЛЬНОЕ СРЕДСТВО ДЛЯ АТТРАКЦИОНОВ | 2011 |
|
RU2470823C1 |
| Русская печь | 1925 |
|
SU1930A1 |
| Русская печь | 1925 |
|
SU1930A1 |

