ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение в общем относится к управлению дорожным движением на перекрестках и, в частности, к системам и способам помощи на перекрестках с использованием специализированной связи на коротких расстояниях.
УРОВЕНЬ ТЕХНИКИ
[0002] Иногда при пересечении перекрестка во время затора водители предполагают, что они смогут своевременно пересечь перекресток до переключения сигнала светофора на красный свет, чтобы не остаться посреди перекрестка, когда транспортные средства на другой стороне перекрестка прекратят движение. Это явление называется блокированием перекрестка. Во многих регионах выезд на перекресток при отсутствии достаточного пространства на другой стороне для освобождения перекрестка является облагаемым штрафом нарушением. Кроме того, транспортные средства, оставшиеся на перекрестках, вызывают затор машин на перекрестке, поскольку перекрестный поток движения не может пересечь перекресток. Это в свою очередь вызывает блокирование смежных перекрестков.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Заявлено транспортное средство, содержащее приемопередатчик специализированной связи на коротких расстояниях, выполненный с возможностью приема сообщений безопасности от других транспортных средств; и блок помощи на перекрестках, выполненный с возможностью до достижения транспортным средством перекрестка: определения вероятности наличия пространства для транспортного средства на другой стороне перекрестка; и отображения рекомендации о том, следует ли пересекать перекресток, на основе вероятности.
Причем в упомянутом транспортном средстве сообщения безопасности от других транспортных средств включают в себя
значение скорости для соответствующего одного из других транспортных средств, направление движения соответствующего одного из других транспортных средств и местоположение соответствующего одного из других транспортных средств.
Причем в упомянутом транспортном средстве для определения вероятности наличия пространства для транспортного средства на другой стороне перекрестка блок помощи на перекрестках выполнен с возможностью определения значений скорости и направлений движения тех из других транспортных средств, которые находятся на другой стороне перекрестка.
Причем в упомянутом транспортном средстве блок помощи на перекрестках выполнен с возможностью определения тормозного пути транспортного средства.
Причем в упомянутом транспортном средстве рекомендация о том, следует ли пересекать перекресток, основана на вероятности наличия пространства для транспортного средства на другой стороне перекрестка и тормозном пути транспортного средства.
[0004] Причем в упомянутом транспортном средстве сообщения безопасности от других транспортных средств представляют собой первые сообщения безопасности, и причем блок помощи на перекрестках выполнен с возможностью приема посредством приемопередатчика специализированной связи на коротких расстояниях вторых сообщений безопасности от светофора на перекрестке. Причем в упомянутом транспортном средстве второе сообщение безопасности включает в себя такт сигналов светофора под управлением светофора. Причем в упомянутом транспортном средстве рекомендация о том, следует ли пересекать перекресток, основана на вероятности наличия пространства для транспортного средства на другой стороне перекрестка и времени между переключением одного из сигналов светофоров с зеленого света на красный свет, причем один из сигналов светофоров соответствует направлению движения транспортного средства.
[0005] Способ, содержащий этапы, на которых: принимают посредством приемопередатчика специализированной связи на коротких расстояниях сообщения безопасности от вторых транспортных средств в диапазоне первого транспортного средства; до достижения первым транспортным средством перекрестка: определяют с использованием процессора вероятность наличия пространства для первого транспортного средства на другой стороне перекрестка; и отображают рекомендацию о том, следует ли пересекать перекресток, на основе вероятности.
Причем в способе сообщения безопасности от вторых транспортных средств включают в себя значение скорости для соответствующего одного из других транспортных средств, направление движения соответствующего одного из других транспортных средств и местоположение соответствующего одного из других транспортных средств.
Причем в способе определение вероятности наличия пространства для первого транспортного средства на другой стороне перекрестка включает в себя этап, на котором определяют значения скорости и направления движения тех из вторых транспортных средств, которые находятся на другой стороне перекрестка.
Упомянутый способ включает в себя этап, на котором определяют тормозной путь первого транспортного средства.
Причем в способе рекомендация о том, следует ли пересекать перекресток, основана на вероятности наличия пространства для первого транспортного средства на другой стороне перекрестка и тормозном пути первого транспортного средства.
Причем в способе сообщения безопасности от вторых транспортных средств представляют собой первые сообщения безопасности, и способ включает в себя этап, на котором принимают посредством приемопередатчика специализированной связи на коротких расстояниях вторые сообщения безопасности от светофора на перекрестке.
Причем в способе второе сообщение безопасности включает в себя такт сигналов светофора под управлением светофора.
Причем в способе рекомендация о том, следует ли пересекать перекресток, основана на вероятности наличия пространства для транспортного средства на другой стороне перекрестка и времени между переключением одного из сигналов светофоров с зеленого света на красный свет, причем один из сигналов светофоров соответствует направлению движения первого транспортного средства.
[0006] Материальный машиночитаемый носитель, содержащий инструкции, которые при выполнении побуждают транспортное средство к: приему посредством приемопередатчика специализированной связи на коротких расстояниях сообщений безопасности от вторых транспортных средств в диапазоне первого транспортного средства; до достижения первым транспортным средством перекрестка: определению вероятности наличия пространства для первого транспортного средства на другой стороне перекрестка; и отображению рекомендации о том, следует ли пересекать перекресток, на основе вероятности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Для лучшего понимания изобретения может быть сделана ссылка на варианты выполнения, показанные на следующих далее чертежах. Компоненты на чертежах необязательно выполнены в масштабе, и связанные элементы могут быть опущены, или в некоторых примерах пропорции могут быть преувеличены так, чтобы подчеркнуть и наглядно проиллюстрировать новые описанные в настоящем документе признаки. Кроме того, системные компоненты могут быть расположены различным образом, известным в уровне техники. Дополнительно, на чертежах одинаковые ссылочные позиции обозначают соответствующие части на различных видах.
[0008] Фиг. 1 иллюстрирует примерный перекресток с транспортными средствами и инфраструктурой, обеспечивающей помощь на перекрестках с использованием специализированной связи на коротких расстояниях в соответствии с замыслами настоящего изобретения.
[0009] Фиг. 2 иллюстрирует другой примерный перекресток с транспортными средствами и инфраструктурой для обеспечения помощи на перекрестках с использованием специализированной связи на коротких расстояниях.
[0010] Фиг. 3 представляет собой структурную схему электронных компонентов транспортных средств, показанных на Фиг. 1.
[0011] Фиг. 4 представляет собой блок-схему последовательности операций, изображающую примерный способ помощи транспортному средству на перекрестке, показанном на Фиг. 1, который может быть реализован электронными компонентами, показанными на Фиг. 3.
[0012] Фиг. 5 представляет собой другую блок-схему последовательности операций, изображающую примерный способ помощи транспортному средству на перекрестке, показанном на Фиг. 1, который может быть реализован электронными компонентами, показанными на Фиг. 3.
[0013] Фиг. 6 представляет собой блок-схему последовательности операций, изображающую примерный способ помощи транспортному средству на перекрестке, показанном на Фиг. 2, который может быть реализован электронными компонентами, показанными на Фиг. 3.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0014] Хотя изобретение может быть выполнено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и неограничивающие варианты выполнения с пониманием, что настоящее раскрытие следует рассматривать как иллюстративный пример изобретения, а не как ограничение изобретения конкретными проиллюстрированными вариантами выполнения.
[0015] Технология связи между транспортными средствами (V2V) и между транспортным средством и инфраструктурой (V2I) обеспечивает обмен информацией между транспортными средствами и узлами, связанными с инфраструктурой (например, светофорами, тоннелями, мостами и т.д.). Время от времени транспортные средства передают широковещательным образом сообщения безопасности, которые включают в себя информацию, относящуюся к транспортному средству, такую как размер транспортного средства (например, длина, ширина, масса и т.д.), скорость транспортного средства, направление движения транспортного средства и местоположение транспортного средства. Транспортные средства и узлы инфраструктуры, принимающие широковещательные сообщения безопасности, принимают решения о взаимодействии с транспортным средством, широковещательным образом передающим сообщение.
[0016] Как рассмотрено ниже, при приближении транспортного средства к перекрестку оно принимает широковещательные сообщения от других транспортных средств и узла инфраструктуры светофора на перекрестке для определения, может ли следующее впереди транспортное средство переместиться на другую сторону перекрестка. Транспортное средство, приближающееся к перекрестку, определяет скорости и местоположения других транспортных средств с тем же направлением движения на обеих сторонах перекрестка. Транспортное средство также определяет состояния дороги для определения тормозного пути транспортного средства. Кроме того, транспортное средство определяет на основе широковещательных сообщений безопасности от узла инфраструктуры светофора на перекрестке время до переключения сигнала светофора на желтый свет. На основе этой информации транспортное средство рекомендует либо пересечь перекресток, либо затормозить.
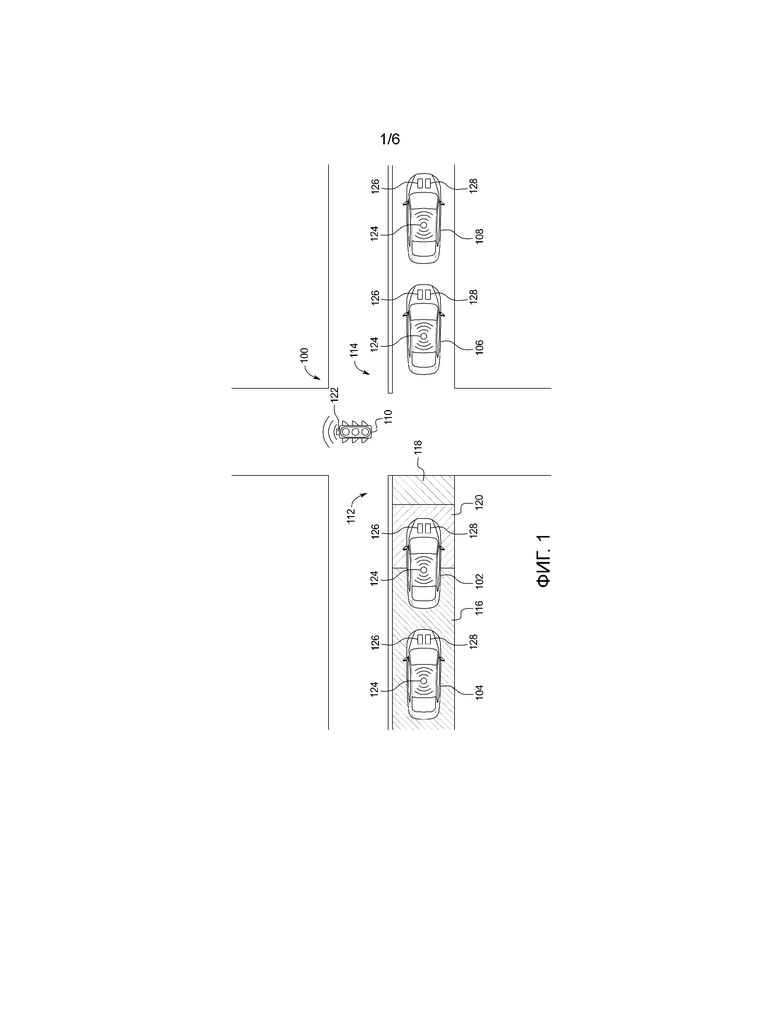
[0017] Фиг. 1 иллюстрирует примерный перекресток 100 с транспортными средствами 102, 104, 106 и 108 (например, легковыми автомобилями, грузовыми автомобилями, полугрузовыми автомобилями, мотоциклами, мопедами и т.д.) и светофором 110, обеспечивающим помощь на перекрестках с использованием специализированной связи на коротких расстояниях (DSRC) в соответствии с замыслами настоящего изобретения. Перекресток 100 имеет ближнюю сторону 112 и дальнюю сторону 114. Ближняя сторона 112 представляет собой сторону перекрестка 100, с которой пересекающее перекресток транспортное средство 102 приближается к перекрестку 100. Дальняя сторона 114 представляет собой сторону перекрестка 100, противоположную ближней стороне 112.
[0018] В проиллюстрированном примере ближняя сторона 112 разделена на зону 116 остановки, зону 118 движения и зону 120 выбора. Зона 116 остановки представляет собой область, для которой, если пересекающее перекресток транспортное средство 102 находится в этой области при переключении светофора 110 с зеленого света на желтый свет, пересекающему перекресток транспортному средству 102 не следует пересекать перекресток 100. Например, если пересекающее перекресток транспортное средство 102 в зоне 116 остановки начнет пересечение перекрестка 100, пересекающее перекресток транспортное средство 102 вероятнее всего будет находиться на перекрестке 100 при переключении сигнала светофора с желтого света на красный свет. Зона 118 движения представляет собой область, в которой, если пересекающее перекресток транспортное средство 102 находится в этой области при переключении светофора 110 с зеленого света на желтый свет, пересекающему перекресток транспортному средству 102 следует пересечь перекресток 100. Например, если пересекающее перекресток транспортное средство 102 находится в зоне 118 движения, пересекающее перекресток транспортное средство 102 не сможет безопасно остановиться до достижения перекрестка.
[0019] Зона 120 выбора представляет собой область между зоной 116 остановки и зоной 118 движения, в которой, если пересекающее перекресток транспортное средство 102 находится в этой области при переключении светофора 110 с зеленого света на желтый свет, пересекающее перекресток транспортное средство 102 может быть (a) не способно остановиться перед перекрестком 100 и (b) не способно пересечь перекресток 100 до переключения светофора 110 с желтого света на красный свет. При нахождении пересекающего перекресток транспортного средства 102 в зоне 120 выбора водитель пересекающего перекресток транспортного средства 102 принимает субъективное решение. Однако области зоны 116 остановки, зоны 118 движения и зоны 120 выбора изменяются в зависимости от скорости пересекающего перекресток транспортного средства 102, состояний дороги и дорожного движения.
[0020] В проиллюстрированном примере светофор 110 включает в себя приемопередатчик 122 специализированной связи на коротких расстояниях (DSRC). В некоторых примерах приемопередатчик 122 DSRC находится на светофоре 110. Альтернативно в некоторых примерах приемопередатчик 122 DSRC расположен на блоке управления светофорами (не показан), который управляет работой светофора 110. Светофор 110 через приемопередатчик 122 DSRC передает широковещательным образом сообщение фазы и такта сигнала (SPaT). Сообщения SPaT включают в себя состояние сигналов в каждом направлении и такт сигналов в каждом направлении. Например, сообщение SPaT светофора 110 может указывать, что пара сигналов север-юг в настоящее время является красной и переключатся на зеленый свет через 25 секунд, а пара сигналов восток-запад в настоящее время является зеленой и переключатся на желтый свет через 20 секунд. В некоторых примерах светофор 110 через приемопередатчик 122 DSRC передает широковещательным образом сообщение с геометрическим описанием перекрестка (GID). Сообщение GID содержит размеры перекрестка 100. В некоторых примерах светофор 110 принимает и отвечает на сообщения от транспортных средств 102, 104, 106 и 108. Например, одно из транспортных средств 102 может широковещательным образом передавать, что оно въезжает на ассоциированный перекресток 100, и его оценочное время прохождения перекрестка 100. В таком примере, если светофор 110 определяет, что транспортное средство 102 будет находиться на перекрестке 100 в то время, когда запланировано переключение перекрестного светофора на зеленый свет, светофор 110 может отложить переключение перекрестного светофора до тех пор, пока транспортное средство не освободит перекресток 100.
[0021] Транспортные средства 102, 104, 106 и 108 могут представлять собой стандартное бензиновое транспортное средство, гибридное транспортное средство, электрическое транспортное средство, транспортное средство на топливных элементах или любой другой тип подходящего транспортного средства. Транспортные средства 102, 104, 106 и 108 могут быть неавтономными, полуавтономными или автономными. Транспортные средства 102, 104, 106 и 108 включают в себя части, связанные с мобильностью, такие как силовая передача с двигателем, коробка передач, подвеска, карданный вал и/или колеса и т.д. Транспортные средства 102, 104, 106 и 108 также могут включать в себя стандартные элементы (не показаны), такие как приборная панель, регулируемые сиденья, один или более аккумуляторов, система HVAC (отопления, вентиляции и кондиционирования воздуха), включающая в себя компрессор и электронный расширительный клапан, ветровое стекло, двери, окна, ремни безопасности, подушки безопасности и шины.
[0022] Транспортные средства 102, 104, 106 и 108 включают в себя приемопередатчик 124 DSRC, блок 126 управления сцеплением и блок 128 помощи на перекрестках. Примерный приемопередатчик 124 DSRC включает в себя антенну/антенны, радиоприемник/радиоприемники и программное обеспечение для передачи широковещательным образом сообщений безопасности. Сообщения безопасности включают в себя размер (например, длину, ширину, массу и т.д.) широковещательным образом передающего сообщение транспортного средства 102, 104, 106 и 108, скорость широковещательным образом передающего сообщение транспортного средства 102, 104, 106 и 108, направление движения широковещательным образом передающего сообщение транспортного средства 102, 104, 106 и 108 и местоположение широковещательным образом передающего сообщение транспортного средства 102, 104, 106 и 108. Приемопередатчик 124 DSRC также принимает сообщение безопасности транспортных средств 102, 104, 106 и 108 в некотором диапазоне (например, в пределах 300 метров).
[0023] Блок 126 управления сцеплением предотвращает потерю сцепления колес транспортного средства 102, 104, 106 и 108. Блок 126 управления сцеплением обнаруживает изменение скорости колес транспортного средства 102, 104, 106 и 108 с разными темпами. Блок 126 управления сцеплением выводит сигнал при проскальзывании одного из колес в ответ на крутящий момент от силовой передачи, который указывает состояния дороги (например, мокрая, скользкая и т.д.), которые влияют на тормозной путь транспортного средства 102, 104, 106 и 108. В некоторых примерах сигнал, выдаваемый блоком 126 управления сцеплением, имеет значение между 0 и 1, которое указывает величину трения между дорогой и шиной.
[0024] Блок 128 помощи на перекрестках обеспечивает рекомендацию (например, посредством информационно-развлекательного головного блока 304, показанного ниже на Фиг. 3) о том, следует ли пересекать перекресток 100, и/или обеспечивает инструкцию (например, для автономного управления движением) о том, следует ли пересекать перекресток 100. Блок 128 помощи на перекрестках основывает рекомендацию на (i) местоположении и скорости транспортных средств (например, транспортных средств 106 и 108) на дальней стороне 114 перекрестка 100, тормозном пути транспортного средства (например, транспортного средства 102) и (iii) времени до переключения светофора 110 с зеленого света на желтый свет. В некоторых примерах блок 128 помощи на перекрестках также учитывает ускорение и расстояние до транспортных средств 106 и 108.
[0025] Блок 128 помощи на перекрестках коммуникативно связан с приемопередатчиком 124 DSRC. Блок 128 помощи на перекрестках периодически (например, каждую секунду, каждые пять секунд и т.д.) анализирует сообщение безопасности, принимаемое от других транспортных средств 104, 106 и 108, для определения, какие транспортные средства 106 и 108 находятся на дальней стороне 114 перекрестка 100 с тем же направлением движения, что и пересекающее перекресток транспортное средство 102. Блок 128 помощи на перекрестках анализирует скорость/скорости транспортного средства/средств 106 и 108 с тем же направлением движения и схему дорожного движения (например, расстояния между транспортными средствами 106 и 108 и т.д.) на дальней стороне 114 перекрестка 100. Кроме того, блок 128 помощи на перекрестках принимает сообщения SPaT от светофора 110. На основе сообщений SPaT от светофора 110 блок 128 помощи на перекрестках определяет состояние и такт светофора 110, соответствующего направлению движения транспортного средства 102.
[0026] Блок 128 помощи на перекрестках определяет тормозной путь транспортного средства 102. Тормозной путь основан на скорости транспортного средства 102, состоянии дороги и массе транспортного средства 102. Для определения скорости и/или состояния дороги блок 128 помощи на перекрестках коммуникативно связан с блоком 126 управления сцеплением. Альтернативно или дополнительно в некоторых примерах блок 128 помощи на перекрестках коммуникативно связан с датчиками скорости колес транспортного средства 102 и/или антиблокировочным модулем. Блок 128 помощи на перекрестках использует полную массу (GVW) транспортного средства 102. В некоторых примерах GVW транспортного средства 102 сохранена в памяти (например, памяти 322, показанной ниже на Фиг. 3). В некоторых примерах блок 128 помощи на перекрестках может использовать данные от других датчиков, установленных на транспортном средстве 102, для определения тормозного пути транспортных средств, таких как датчики системы контроля давления в шинах, которые сообщают уровни накачки шин.
[0027] На основе (a) расстояния до перекрестка 100, (b) времени прохождения перекрестка 100, (c) тормозного пути транспортного средства 102, (d) состояния и такта светофора 110, соответствующего направлению движения транспортного средства 102, и (e) схемы дорожного движения на дальней стороне 114 перекрестка 100 блок 128 помощи на перекрестках определяет рекомендацию, относительно того, следует ли пересекать перекресток 100. Блок 128 помощи на перекрестках рекомендует остановиться перед перекрестком, если (i) светофор переключится на красный свет (например, с зеленого на желтый свет, а затем с желтого на красный свет и т.д.) до предполагаемого перемещения транспортного средства 102 через перекресток 100, и транспортное средство 102 может остановиться перед перекрестком 100, или (ii) если предполагается, что на дальней стороне 114 перекрестка 100 не будет достаточного пространства для транспортного средства 102, и транспортное средство 102 может остановиться перед перекрестком 100. Блок 128 помощи на перекрестках рекомендует пересечение перекрестка, если (i) предполагается, что транспортное средство 102 переместиться через перекресток 100 до переключения светофора 110 на красный свет, и (ii) предполагается, что на дальней стороне 114 перекрестка 100 имеется достаточное пространство для транспортного средства 102. В некоторых примерах блок 128 помощи на перекрестках рекомендует пересечение перекрестка, если (i) предполагается, что на дальней стороне 114 перекрестка 100 будет достаточное пространство для транспортного средства 102, (ii) светофор переключится на красный свет до предполагаемого перемещения транспортного средства 102 через перекресток 100, и (c) транспортное средство 102 не может остановиться перед перекрестком 100. В некоторых таких примерах блок 128 помощи на перекрестках отправляет запрос через приемопередатчик 124 DSRC светофору 110 на удержание красного света перекрестного сигнала светофора до тех пор, пока транспортное средство 102 не освободит перекресток 100.
[0028] В некоторых примерах блок 128 помощи на перекрестках обеспечивает другие рекомендации, которые влияют на тормозной путь и/или время прохождения перекрестка 100. В некоторых таких примерах блок 128 помощи на перекрестках рекомендует регулировку (например, увеличение или снижение) скорости транспортного средства 102. Например, если на текущей скорости блок 128 помощи на перекрестках определил, что (i) транспортное средство 102 не может остановиться перед перекрестком 100, и (ii) транспортное средство 102 не может пересечь перекресток до переключения светофора 110 на красный свет, блок 128 помощи на перекрестках может рекомендовать снижение скорости транспортного средства 102.
[0029] В некоторых примерах на основе принимаемого сообщения безопасности блок 128 помощи на перекрестках отслеживает скорость и местоположение одного или более транспортных средств (например, транспортного средства 104) за транспортным средством 102. В таких примерах блок 128 помощи на перекрестках вычисляет оценочный тормозной путь транспортного средства 104 за транспортным средством 102. В некоторых таких примерах блок 128 помощи на перекрестках может изменять свою рекомендацию на основе определения, что, если транспортное средство 102 остановится перед перекрестком 100, следующее сзади транспортное средство 104 не сможет остановиться до столкновения с транспортным средством 102. В таком примере блок 128 помощи на перекрестках рекомендует, чтобы транспортное средство 102 пересекло перекресток 100, и подает сигнал светофору 110 на удержание красного света перекрестного светофора при пересечении перекрестка 100 транспортным средством.
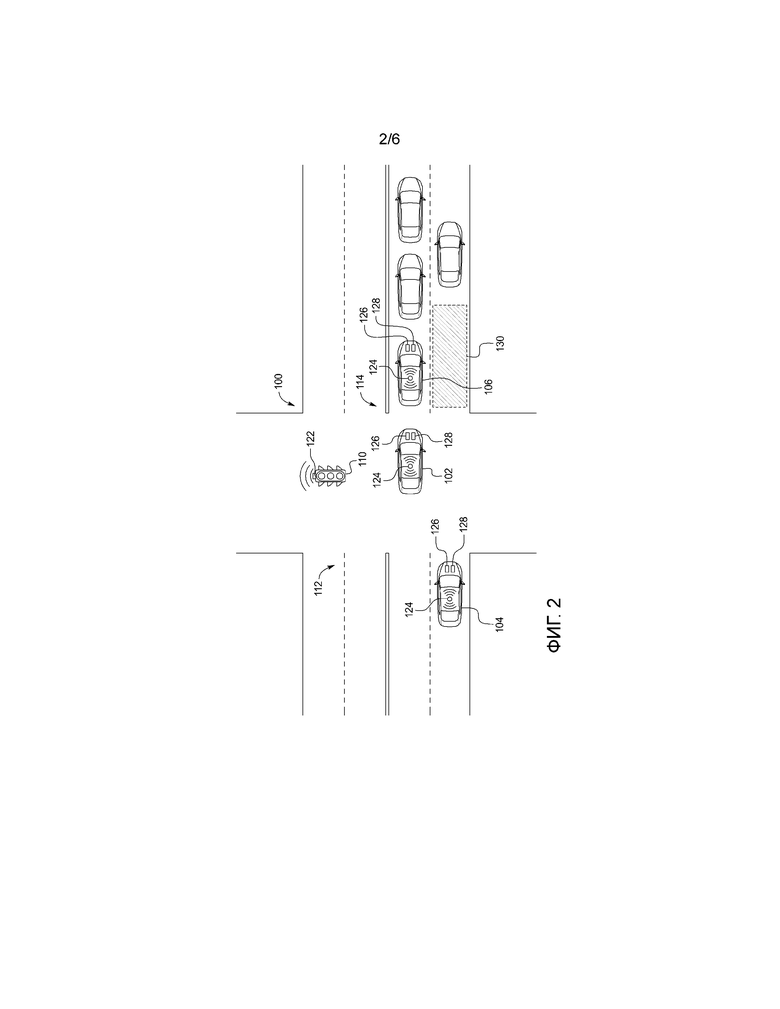
[0030] Фиг. 2 иллюстрирует другой примерный перекресток 100 с транспортными средствами 102, 104, 106 и 108 и светофором 110 для обеспечения помощи на перекрестках с использованием DSRC. В проиллюстрированном примере пересекающее перекресток транспортное средство 102 находится на перекрестке 100. В некоторых примерах блок 128 помощи на перекрестках отслеживает точное местоположение пересекающего перекресток транспортного средства 102 на основе приемника системы глобального позиционирования (GPS) (например, GPS-приемника 318 на Фиг. 3), датчиков определения расстояния (например, ультразвуковых датчиков, радара, лидара и т.д.) и/или навигационных данных (например, навигационных данных интеллектуальных систем помощи водителю (ADAS)). При обнаружении блоком 128 помощи на перекрестках, что пересекающее перекресток транспортное средство 102 остановилось на перекрестке 100, блок 128 помощи на перекрестках определяет наличие пространства 130 на дальней стороне 114 перекрестка 100. В некоторых примерах пересекающее перекресток транспортное средство 102 не может изменять полосы движения для перемещения в пространство 130. Например, размер или способность ускорения транспортного средства 102 могут препятствовать перемещению транспортного средства в пространство 130. В некоторых таких примерах блок 128 помощи на перекрестках через приемопередатчик 124 DSRC запрашивает, чтобы транспортное средство 106 на полосе движения, которая находится перед пересекающим перекресток транспортным средством 102, переместилось в пространство 130. Кроме того, в некоторых примерах блок 128 помощи на перекрестках через приемопередатчик 124 DSRC запрашивает, чтобы транспортное средство 104 на той же полосе движения, что и пространство 130, на ближней стороне 112 перекрестка 100 остановилось до выезда на перекресток, чтобы позволить транспортному средству 106 переместиться в пространство 130.
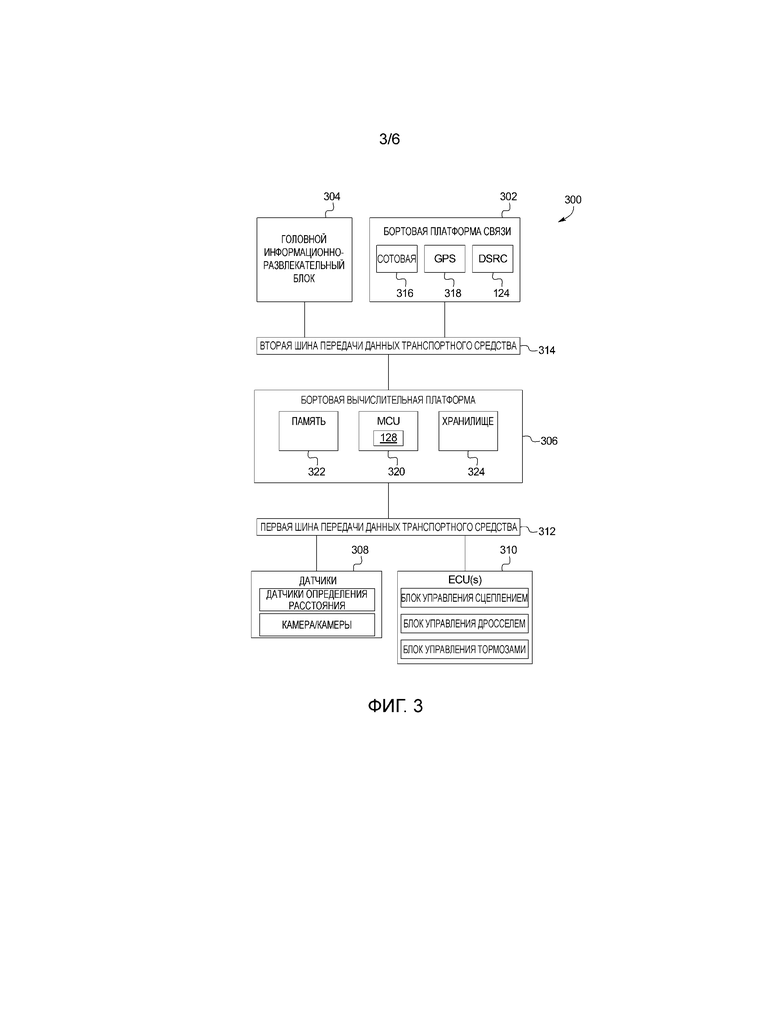
[0031] Фиг. 3 представляет собой структурную схему электронных компонентов 300 транспортных средств, показанных на Фиг. 1. Электронные компоненты 300 включают в себя примерную бортовую платформу 302 связи, примерный информационно-развлекательный головной блок 304, бортовую вычислительную платформу 306, примерные датчики 308, примерные электронные блоки 310 управления (ECU), первую шину 312 передачи данных транспортного средства и вторую шину 314 передачи данных транспортного средства.
[0032] Бортовая платформа 302 связи включает в себя проводные или беспроводные сетевые интерфейсы для обеспечения связи с внешними сетями. Бортовая платформа 302 связи также включает в себя аппаратное обеспечение (например, процессоры, память, хранилище, антенну и т.д.) и программное обеспечение для управления проводными или беспроводными сетевыми интерфейсами. В проиллюстрированном примере бортовая платформа 302 связи включает в себя модем 316 сотовой связи, GPS-приемник 318 и приемопередатчик 124 DSRC. Модем 316 сотовой связи включает в себя контроллеры для сетей на основе стандартов (например, глобальной системы мобильной связи (GSM), универсальной мобильной телекоммуникационной системы (UMTS), долгосрочного развития (LTE), множественного доступа с кодовым разделением (CDMA), WiMAX (IEEE 802.16m); и беспроводного гигабита (IEEE 802.11ad) и т.д.). Бортовая платформа 302 связи также включает в себя один или более контроллеров для беспроводных локальных сетей, например, контроллер Wi-FI® (включая IEEE 802.11 a/b/g/n/ac или другие), контроллер Bluetooth® (на основе Bluetooth® Core Specification, поддерживаемой Bluetooth Special Interest Group) и/или контроллер ZigBee® (IEEE 802.15.4) и/или контроллер коммуникации ближнего поля (NFC) и т.д. Дополнительно, внешняя сеть/сети может/могут представлять собой сеть общего пользования, например, интернет; частную сеть, например, интранет; или их сочетание, и может/могут использовать множество сетевых протоколов доступных сейчас или разработанных в будущем, включая, но не ограничиваясь, сетевые протоколы на основе TCP/IP. Бортовая платформа 302 связи также может включать в себя проводной или беспроводной интерфейс для обеспечения прямой связи с электронным устройством (таким как, смартфон, планшетный компьютер, переносной компьютер и т.д.).
[0033] Примерные модули 124 DSRC включают в себя антенну/антенны, радиоприемник/радиоприемники и программное обеспечение для передачи сообщений и установления прямой связи между транспортными средствами 104, 106 и 108 и светофором 110. DSRC представляет собой протокол или систему беспроводной связи, предназначенную, главным образом, для транспорта, работающую в диапазоне 5,9 ГГц. Более подробная информация о сети DSRC и о взаимодействии сети с аппаратным обеспечением и программным обеспечением транспортного средства доступна в докладе по Спецификации требований к системе (SyRS) Министерства транспорта США, июнь 2011 г. (доступен по ссылке http://www.its.dot.gov/meetings/pdf/CoreSystem_SE_SyRS_RevA%20(2011-06-13).pdf), который включен сюда путем ссылки во всей своей полноте вместе со всеми документами, упомянутыми на страницах 11-14 доклада SyRS. Системы DSRC могут быть установлены на транспортных средствах и на объектах инфраструктуры вдоль обочин. Система DSRC, включающая информацию от объектов инфраструктуры, известна как «придорожная» система. DSRC может быть объединена с другими технологиями, такими как система глобального позиционирования (GPS), связь по видимому свету (VLC), сотовая связь и радиолокатор малого радиуса действия, содействующим транспортным средствам сообщать их положение, скорость, направление движения, положение относительно других объектов и обмениваться информацией с другими транспортными средствами или внешними компьютерными системами. Системы DSRC могут быть интегрированы с другими системами, такими как мобильные телефоны.
[0034] В настоящее время сеть DSRC обозначается аббревиатурой или названием DSRC. Однако иногда используются другие названия, обычно связанные с программой для транспортного средства, подключенного к сети или т.п. Большинство этих систем представляют собой либо чистую DSRC, либо вариацию стандарта беспроводной связи IEEE 802.11. В настоящем документе будет использован термин DSRC. Однако кроме чистой системы DSRC, он также охватывает специализированные системы беспроводной связи между автомобилями и системой придорожной инфраструктуры, которые интегрированы с GPS и основаны на протоколе IEEE 802.11 для беспроводных локальных сетей (например, 802.11p и т.д.).
[0035] Информационно-развлекательный головной блок 304 обеспечивает взаимодействие между транспортным средством 102 и пользователями (например, водителями, пассажирами и т.д.). Информационно-развлекательный головной блок 304 включает в себя цифровые и/или аналоговые интерфейсы (например, устройства ввода и устройства вывода) для приема входных данных от пользователя/пользователей и отображения информации. Устройства ввода могут включать в себя, например, ручку управления, приборную панель, цифровую камеру для получения изображений и/или визуального распознавания команд, сенсорный экран, устройство ввода аудиосигнала (например, встроенный микрофон), кнопки или сенсорную панель. Устройства вывода могут включать в себя устройства вывода на приборной панели (например, циферблаты, световые устройства), исполнительные устройства, панель приборной доски, проекционный дисплей, дисплей на центральной консоли (например, жидкокристаллический дисплей («LCD»), дисплей на органических светодиодах («OLED»), плоскопанельный дисплей, твердотельный дисплей или проекционный дисплей) и/или динамики. Информационно-развлекательный головной блок 304 отображает и/или иным образом сообщает рекомендации от блока 128 помощи на перекрестках. В некоторых примерах рекомендации визуально передаются водителю на дисплее на центральной консоли, дисплее на приборной панели и/или проекционном дисплее. Например, когда блок 128 помощи на перекрестках рекомендует пересечение перекрестка, цвет дисплея на приборной панели может меняться на зеленый, а когда блок 128 помощи на перекрестках рекомендует не пересекать перекресток, цвет дисплея на приборной может меняться на красный. Альтернативно или дополнительно в некоторых примерах рекомендации от блока 128 помощи на перекрестках акустически передаются пользователю через динамики.
[0036] Бортовая вычислительная платформа 306 включает в себя процессор или контроллер 320, память 322 и хранилище 324. В некоторых примерах бортовая вычислительная платформа 306 выполнена так, чтобы включать в себя блок 128 помощи на перекрестках. Альтернативно в некоторых примерах блок 128 помощи на перекрестках может быть встроен в ECU 310 с собственным процессором и памятью. Процессор или контроллер 320 может представлять собой любое подходящее устройство обработки или набор устройств обработки, таких как, но не ограничиваясь: микропроцессор, платформа на основе микроконтроллера, подходящая интегральная схема, одна или более программируемых пользователем вентильных матриц (FPGA) или одна или более интегральных схем специального назначения (ASIC). Память 322 может представлять собой энергозависимую память (например, RAM, которая может включать в себя энергонезависимую RAM, магнитную RAM, сегнетоэлектрическую RAM и любые другие подходящие формы); энергонезависимую память (например, дисковую память, флэш-память, EPROM, EEPROM, энергонезависимую твердотельную память на основе мемристора и т.д.), неизменную память (например, EPROM) и постоянную память. В некоторых примерах память 322 включает в себя множество типов памяти, в частности, энергозависимую память и энергонезависимую память. Хранилище 324 может включать в себя любое устройство хранения большой емкости, например, жесткий диск и/или твердотельный накопитель.
[0037] Память 322 и хранилище 324 представляют собой машиночитаемый носитель, на котором могут быть сохранены один или более наборов инструкций, таких как программное обеспечение для выполнения способов в соответствии с настоящим изобретением. Инструкции могут воплощать один или более способов или логическую схему, которые описаны в настоящем документе. В конкретном варианте выполнения инструкции могут находиться полностью или по меньшей мере частично в любом одном или более из памяти 322, машиночитаемого носителя и/или в процессоре 320 при выполнении инструкций.
[0038] Выражения «не носящий временного характера машиночитаемый носитель» и «машиночитаемый носитель» следует понимать как включающие в себя один носитель или множество носителей, например, централизованная или распределенная база данных, и/или связанные кэши и серверы, которые хранят один или более наборов инструкций. Выражения «не носящий временного характера машиночитаемый носитель» и «машиночитаемый носитель» также включают в себя любой материальный носитель, который выполнен с возможностью хранения, кодирования или переноса набора инструкций для выполнения процессором, или который побуждает систему к выполнению одного или более способов или операций, раскрытых в настоящем документе. В данном контексте выражение «машиночитаемый носитель» четко определено как включающее в себя любой тип машиночитаемого устройства хранения и/или накопителя на дисках и исключающее распространяющие сигналы.
[0039] Датчики 308 могут быть расположены в транспортном средстве 102 и вокруг транспортного средства 102 любым подходящим образом. В проиллюстрированном примере датчики 308 представляют собой датчики определения расстояния и камеры. Датчики определения расстояния определяют пространство 130, в которое может переместиться одно из транспортных средств 102 и 106. Дополнительно датчики определения расстояния могут быть использованы для определения местоположения или точного местоположения транспортного средства 102.
[0040] ECU 310 отслеживают и управляют системами транспортного средства 102. ECU 310 связываются и обмениваются информацией по первой шине 312 передачи данных транспортного средства. Кроме того, ECU 310 могут сообщать характеристики (такие как состояние ECU 310, показания датчиков, состояние управления, коды ошибок и диагностические коды и т.д.) другим ECU 310 и/или принимать запросы от других ECU 310. Некоторые транспортные средства 102 могут иметь семьдесят или более ECU 310, расположенных в различных местах вокруг транспортного средства 102, коммуникативно связанных с первой шиной 312 передачи данных транспортного средства. ECU 310 представляют собой отдельные наборы электроники, которые включают в себя собственную схему/схемы (например, интегральные схемы, микропроцессоры, память, хранилище и т.д.) и микропрограммное обеспечение, датчики, исполнительные устройства и/или установочное оборудование. В проиллюстрированном примере ECU 310 включают в себя блок управления сцеплением, блок управления дросселем и блок управления тормозами. Блок управления сцеплением обнаруживает и отвечает на состояния дороги, которые вызывают проскальзывание колес, и которые влияют на тормозной путь транспортного средства 102. Блок управления дросселем и блок управления тормозами могут быть использованы для управления скоростью транспортного средства 102. Например, если транспортное средство 102 является автономным или полуавтономным, блок управления дросселем и блок управления тормозами могут отвечать на рекомендации блока 128 помощи на перекрестках регулировкой скорости транспортного средства 102.
[0041] Первая шина 312 передачи данных транспортного средства коммуникативно связывает датчики 308, ECU 310, бортовую вычислительную платформу 306 и другие устройства, соединенные с первой шиной 312 передачи данных транспортного средства. В некоторых примерах первая шина 312 передачи данных транспортного средства реализована в соответствии с протоколом шины локальной сети контроллеров (CAN), который определен Международной организацией по стандартизации (ISO) 11898-1. Альтернативно в некоторых примерах первая шина 312 передачи данных транспортного средства может представлять собой шину передачи данных мультимедийных систем (MOST) или шину CAN с изменяемой скоростью передачи данных (CAN-FD) (ISO 11898-7). Вторая шина 314 передачи данных транспортного средства коммуникативно связывает бортовую платформу 302 связи, информационно-развлекательный головной блок 304 и бортовую вычислительную платформу 306. Вторая шина 314 передачи данных транспортного средства может представлять собой шину MOST, шину CAN-FD или шину Ethernet. В некоторых примерах бортовая вычислительная платформа 306 коммуникативно изолирует первую шину 312 передачи данных транспортного средства и вторую шину 314 передачи данных транспортного средства (например, посредством межсетевых экранов, брокеров сообщений и т.д.). Альтернативно в некоторых примерах первая шина 312 передачи данных транспортного средства и вторая шина 314 передачи данных транспортного средства представляют собой одну шину передачи данных.
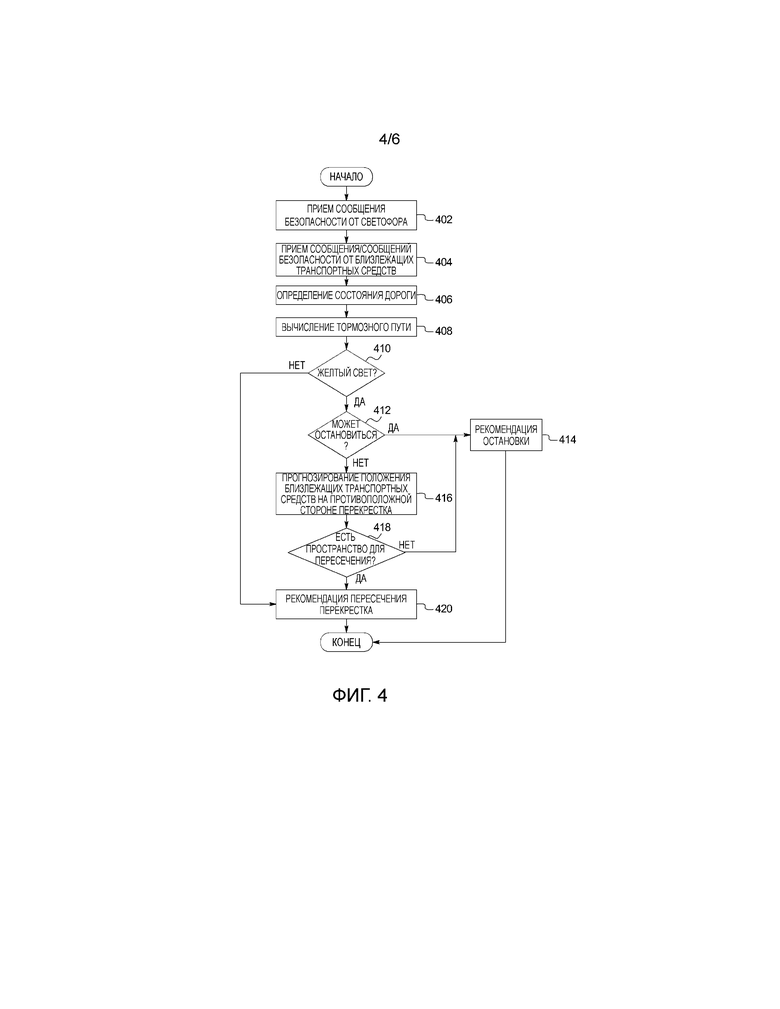
[0042] Фиг. 4 представляет собой блок-схему последовательности операций, изображающую примерный способ помощи транспортному средству 102 на перекрестке 100, показанном на Фиг. 1, который может быть реализован электронными компонентами 300, показанными на Фиг. 3. Первоначально при движении транспортного средства 102 к перекрестку 100 блок 128 помощи на перекрестках через приемопередатчик 124 DSRC принимает сообщение безопасности от одного или более светофоров 110 в диапазоне (этап 402). Сообщения безопасности включают в себя состояние и цикл сигналов соответствующего светофора 110, местоположение соответствующего светофора 110 и длину перекрестка 100. Блок 128 помощи на перекрестках через приемопередатчик 124 DSRC принимает сообщения безопасности, широковещательным образом передаваемые от близлежащих транспортных средств 104, 106 и 108 в диапазоне транспортного средства 102 (этап 404). Сообщения безопасности включают в себя местоположение соответствующего близлежащего транспортного средства 104, 106 и 108, направление движения соответствующего близлежащего транспортного средства 104, 106 и 108, скорость соответствующего близлежащего транспортного средства 104, 106 и 108 и/или размер соответствующего близлежащего транспортного средства 104, 106 и 108.
[0043] Блок 128 помощи на перекрестках определяет состояние дороги (например, мокрая, покрытая льдом, снежная и т.д.) (этап 406). В некоторых примерах блок 128 помощи на перекрестках определяет состояние дороги с помощью блока управления сцеплением. Например, если блок управления сцеплением включает тормоза для компенсации движения одного или более колес с разной скоростью, то блок 128 помощи на перекрестках может сделать вывод, что дорога скользкая. На основе скорости транспортного средства 102, массы транспортного средства 102 и состояния дороги блок 128 помощи на перекрестках вычисляет тормозной путь транспортного средства 102 (этап 408).
[0044] На основе сообщения/сообщений SPaT, принятых от светофора 110 на этапе 402, блок 128 помощи на перекрестках определяет, переключится ли сигнал светофора, соответствующий направлению движения транспортного средства 102, на желтый свет до или во время нахождения транспортного средства на перекрестке 100 (этап 410). Если сигнал светофора не переключится на желтый свет, блок 128 помощи на перекрестках рекомендует пересечение перекрестка 100 (этап 420). В противном случае, если сигнал светофора переключится на желтый свет, на основе тормозного пути, вычисленного на этапе 408, блок 128 помощи на перекрестках определяет, может ли транспортное средство 102 остановиться перед перекрестком 100 (этап 412). Если транспортное средство может остановиться, блок 128 помощи на перекрестках рекомендует остановку (этап 414).
[0045] В противном случае, если блок 128 помощи на перекрестках определяет, что транспортное средство 102 не может остановиться перед перекрестком 100, блок 128 помощи на перекрестках прогнозирует положение/положения транспортных средств 106 и 108 на дальней стороне 114 перекрестка 100 (этап 416). Прогнозируемое положение/положения основано/основаны на информации о направлении движения, скорости и размере в сообщении/сообщениях безопасности от транспортных средств 106 и 108, принятом/принятых на этапе 404. Блок 128 помощи на перекрестках определяет, будет ли иметься пространство для транспортного средства 102 на дальней стороне 114 перекрестка 100 для освобождения перекрестка 100 до переключения соответствующего светофора на красный свет (этап 418). Если блок 128 помощи на перекрестках определяет наличие пространства на дальней стороне 114 перекрестка 100, блок 128 помощи на перекрестках рекомендует пересечение перекрестка 100 (этап 420). В противном случае, если блок 128 помощи на перекрестках определяет отсутствие пространства на дальней стороне 114 перекрестка 100, блок 128 помощи на перекрестках рекомендует не пересекать перекресток 100 (этап 414). В некоторых примерах, когда блок 128 помощи на перекрестках определяет, что транспортное средство 102 не может остановиться перед перекрестком 100, и блок 128 помощи на перекрестках определяет отсутствие пространства на дальней стороне 114 перекрестка 100, блок 128 помощи на перекрестках передает сообщение безопасности, запрашивающее светофор 110 об удержании красного света перекрестного сигнала светофора.
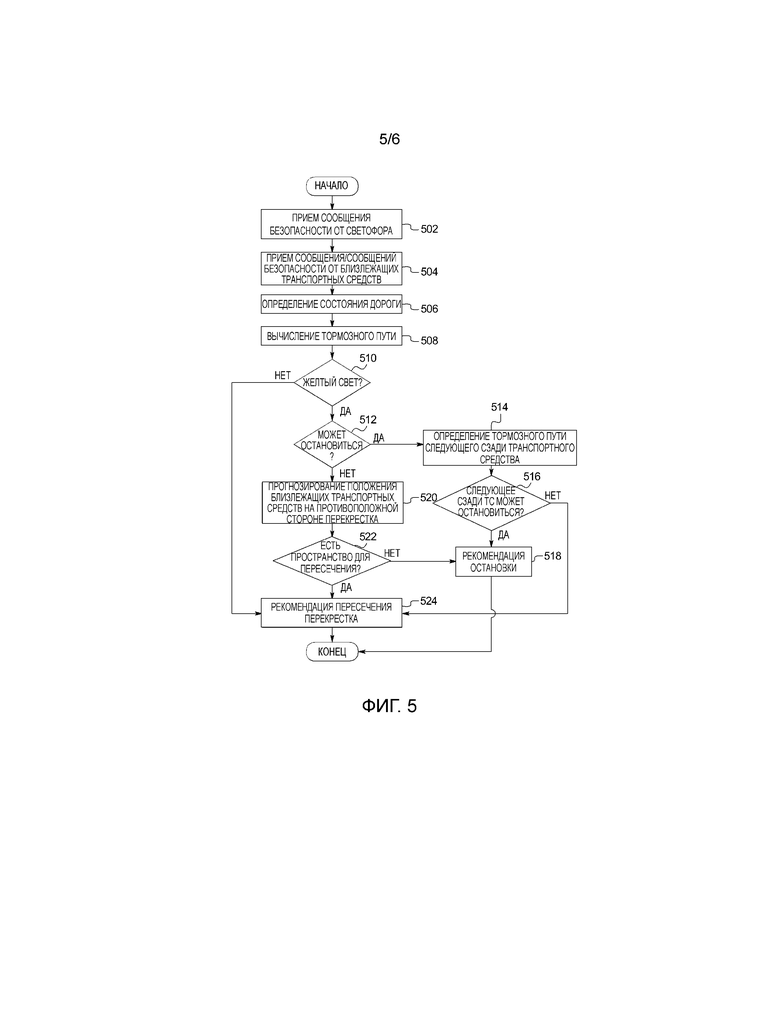
[0046] Фиг. 5 представляет собой другую блок-схему последовательности операций, изображающую примерный способ помощи транспортному средству 102 на перекрестке 100, показанном на Фиг. 1, который может быть реализован электронными компонентами, показанными на Фиг. 3. Первоначально при движении транспортного средства 102 к перекрестку 100 блок 128 помощи на перекрестках через приемопередатчик 124 DSRC принимает сообщение/сообщения SPaT от одного или более светофоров 110 в диапазоне (этап 502). Сообщения безопасности включают в себя состояние и цикл сигналов соответствующего светофора 110, местоположение соответствующего светофора 110 и длину перекрестка 100. Блок 128 помощи на перекрестках через приемопередатчик 124 DSRC принимает сообщения безопасности, передаваемые от близлежащих транспортных средств 104, 106 и 108 в диапазоне транспортного средства 102 (этап 504). Сообщения безопасности включают в себя местоположение соответствующего близлежащего транспортного средства 104, 106 и 108, направление движения соответствующего близлежащего транспортного средства 104, 106 и 108, скорость соответствующего близлежащего транспортного средства 104, 106 и 108 и/или размер соответствующего близлежащего транспортного средства 104, 106 и 108.
[0047] Блок 128 помощи на перекрестках определяет состояние дороги (например, мокрая, покрытая льдом, снежная и т.д.) (этап 506). В некоторых примерах, блок 128 помощи на перекрестках определяет состояние дороги с помощью блока управления сцеплением. Например, если блок управления сцеплением включает тормоза для компенсации движения одного или более колес с разной скоростью, то блок 128 помощи на перекрестках может сделать вывод, что дорога скользкая. На основе скорости транспортного средства 102, массы транспортного средства 102 и состояния дороги блок 128 помощи на перекрестках вычисляет тормозной путь транспортного средства 102 (этап 508).
[0048] На основе сообщения/сообщений SPaT, принятых от светофора 110 на этапе 402, блок 128 помощи на перекрестках определяет, переключится ли сигнал светофора, соответствующий направлению движения транспортного средства 102, на желтый свет до или во время нахождения транспортного средства на перекрестке 100 (этап 510). Если сигнал светофора не переключится на желтый свет, блок 128 помощи на перекрестках рекомендует пересечение перекрестка 100 (этап 524). В противном случае, если сигнал светофора переключится на желтый свет, на основе тормозного пути, вычисленного на этапе 408, блок 128 помощи на перекрестках определяет, может ли транспортное средство 102 остановиться перед перекрестком 100 (этап 512). Если транспортное средство может остановиться, блок 128 помощи на перекрестках определяет тормозной путь одного или более следующих сзади транспортных средств 104 (этап 514). Блок 128 помощи на перекрестках определяет, может ли следующее сзади транспортное средство 104 остановиться до столкновения с транспортным средством 102, если транспортное средство 102 остановится (этап 516). Если следующее сзади транспортное средство 104 может остановиться, блок 128 помощи на перекрестках рекомендует остановку (этап 518). В противном случае, если следующее сзади транспортное средство 104 не может остановиться, блок 128 помощи на перекрестках рекомендует пересечение перекрестка 100 (этап 524). Блок 128 помощи на перекрестках также широковещательным образом передает сообщение безопасности, запрашивающее светофор 110 об удержании красного света перекрестного сигнала светофора.
[0049] В противном случае, если блок 128 помощи на перекрестках определяет, что транспортное средство 102 не может остановиться перед перекрестком 100, блок 128 помощи на перекрестках прогнозирует положение/положения транспортных средств 106 и 108 на дальней стороне 114 перекрестка 100 (этап 520). Прогнозируемое положение/положения основано/основаны на информации о направлении движения, скорости и размере в сообщении/сообщениях безопасности от транспортных средств 106 и 108, принятом/принятых на этапе 404. Блок 128 помощи на перекрестках определяет, будет ли иметься пространство для транспортного средства 102 на дальней стороне 114 перекрестка 100 для освобождения перекрестка 100 до переключения соответствующего светофора на красный свет (этап 522). Если блок 128 помощи на перекрестках определяет наличие пространства на дальней стороне 114 перекрестка 100, блок 128 помощи на перекрестках рекомендует пересечение перекрестка 100 (этап 524). В противном случае, если блок 128 помощи на перекрестках определяет отсутствие пространства на дальней стороне 114 перекрестка 100, блок 128 помощи на перекрестках определяет тормозной путь одного или более следующих сзади транспортных средств 104 (этап 514). Блок 128 помощи на перекрестках определяет, может ли следующее сзади транспортное средство 104 остановиться до столкновения с транспортным средством 102, если транспортное средство 102 остановится (этап 516). Если следующее сзади транспортное средство 104 может остановиться, блок 128 помощи на перекрестках рекомендует остановку (этап 518). В противном случае, если следующее сзади транспортное средство 104 не может остановиться, блок 128 помощи на перекрестках рекомендует пересечение перекрестка 100 (этап 524). Блок 128 помощи на перекрестках также передает сообщение безопасности, запрашивающее светофор 110 об удержании красного света перекрестного сигнала светофора.
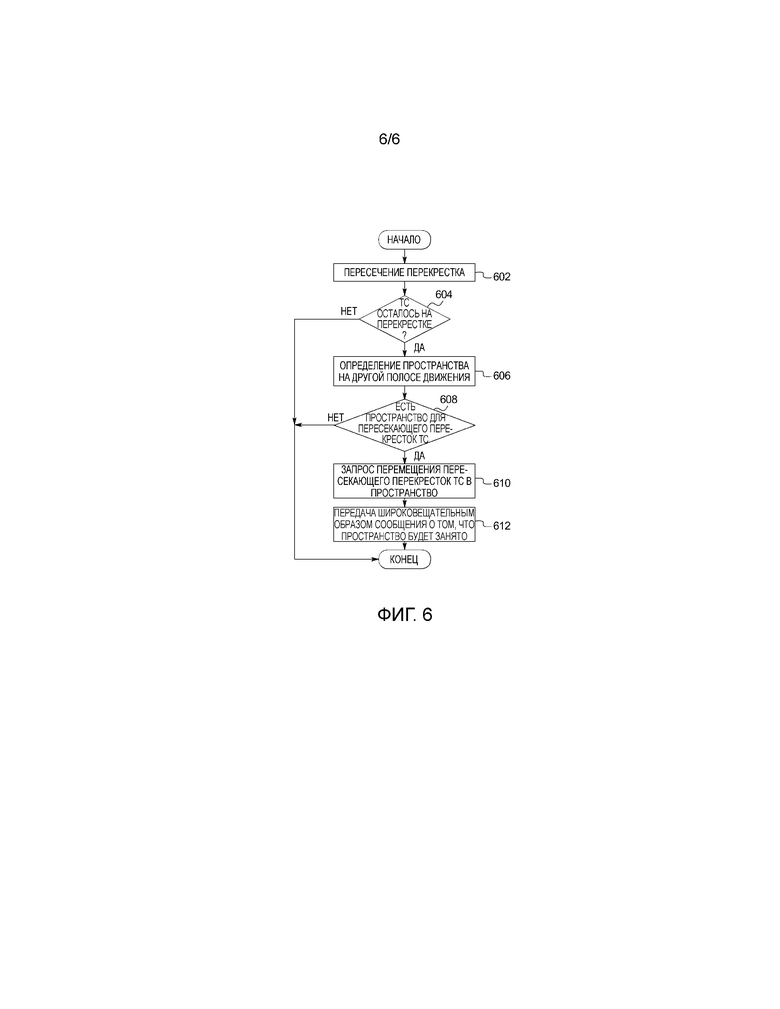
[0050] Фиг. 6 представляет собой блок-схему последовательности операций, изображающую примерный способ помощи транспортному средству на перекрестке, показанном на Фиг. 2, который может быть реализован электронными компонентами 300, показанными на Фиг. 3. Первоначально транспортное средство 102 пересекает перекресток 100 (этап 602). Например, транспортное средство 102 может пересекать перекресток 100 на основе рекомендации от блока 128 помощи на перекрестках на описанном выше этапе 524. Блок 128 помощи на перекрестках определяет, осталось ли транспортное средство 102 на перекрестке 100 (этап 604). В некоторых примерах блок 128 помощи на перекрестках определяет, что транспортное средство 102 осталось на перекрестке 100, на основе информации о точном местоположении и скорости транспортного средства 102. Если транспортное средство 102 осталось на перекрестке 100, блок 128 помощи на перекрестках определяет наличие пространства 130 на дальней стороне 114 перекрестка 100 на полосах, выделенных для направления движения, которое аналогично направлению движения транспортного средства 102 (этап 606). В некоторых примерах определение основано на данных о местоположении в сообщениях безопасности, широковещательным образом передаваемых близлежащими транспортными средствами 104, 106 и 108, данных датчиков определения расстояния на транспортном средстве 102 и/или информации о точном местоположении из навигационных данных (например, данных ADAS) (этап 608). Если блок 128 помощи на перекрестках определяет наличие пространства 130, блок 128 помощи на перекрестках через приемопередатчик 124 DSRC запрашивает, чтобы одно из транспортных средств 106 на той же полосе движения, что и транспортное средство 102, переместилось на пространство 130 (этап 610). Кроме того, блок 128 помощи на перекрестках через приемопередатчик 124 DSRC передает сообщение, информирующее транспортные средства 104 на ближней стороне 112 о том, что пространство 130 будет занято (этап 612).
[0051] Блок-схемы последовательности операций на Фиг. 4, 5 и 7 являются репрезентативными для машиночитаемых инструкций, содержащих одну или более программ, которые при выполнении процессором (например, процессором 320 на Фиг. 3) побуждают транспортное средство 102 к реализации блока 128 помощи на перекрестках, показанных на Фиг. 1 и 2. Дополнительно, хотя примерная программа/программы описана/описаны со ссылкой на блок-схемы, проиллюстрированные на Фиг. 4, 5 и 7, альтернативно может быть использовано множество других способов реализации примерного блока 128 помощи на перекрестках. Например, порядок выполнения этапов может быть изменен, и/или некоторые из описанных этапов могут быть изменены, опущены или объединены.
[0052] В настоящей заявке использование разделительных союзов предназначено для включения соединительных союзов. Использование определенных или неопределенных артиклей не предназначено для указания количества элементов. В частности, ссылка на «объект» предназначена для обозначения одного из возможного множества таких объектов. Дополнительно, союз «или» может быть использован для передачи одновременно присутствующих признаков, а не взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать как подразумевающий значение «и/или». Выражения «включает в себя», «включающий в себя» и «включают в себя» охватывают и имеют такой же объем и смысл, что и выражения «содержит», «содержащий» и «содержат» соответственно.
[0053] Вышеописанные варианты выполнения и, в частности, любые «предпочтительные» варианты выполнения представляют собой возможные примеры реализаций и изложены только для четкого понимания принципов изобретения. Множество изменений и модификаций может быть выполнено в вышеописанном варианте/вариантах выполнения по существу без отклонения от замысла и принципов описанных в настоящем документе технологий. Все такие модификации должны быть включены в пределы объема охраны настоящего изобретения и защищены следующей далее формулой изобретения.
Изобретение относится к системам управления дорожным движением. Головное транспортное средство содержит приемопередатчик специализированной связи на коротких расстояниях, процессор и устройство отображения рекомендаций. Приемопередатчик специализированной связи на коротких расстояниях принимает сообщения безопасности от неподвижного приемопередатчика и первого транспортного средства на дальней стороне перекрестка. Процессор до достижения головным транспортным средством перекрестка определяет первую зону между второй и третьей зонами до перекрестка, размеры зон основаны на скорости транспортного средства. Когда головное транспортное средство находится в первой зоне, основываясь на принятых сообщениях безопасности, процессор прогнозирует, окажется ли первое транспортное средство в пространстве, доступном для головного транспортного средства, когда головное транспортное средство освободит перекресток и перед тем, как сигнал светофора, обращенный к головному транспортному средству, загорится красным светом и определяет рекомендацию о том, следует ли пересекать перекресток, основываясь на прогнозе. Достигается повышение безопасности управления транспортным средством. 3 н. и 12 з.п. ф-лы. 6 ил.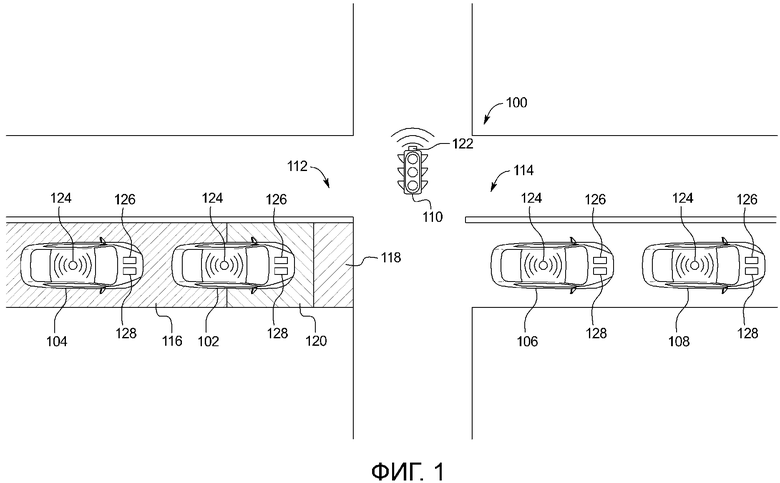
1. Головное транспортное средство, содержащее:
приемопередатчик специализированной связи на коротких расстояниях, который принимает сообщения безопасности от неподвижного приемопередатчика и первого транспортного средства на дальней стороне перекрестка; и
процессор, который, до достижения головным транспортным средством перекрестка:
определяет первую зону между второй и третьей зонами до перекрестка, причем размеры зон основаны на скорости транспортного средства; и
когда головное транспортное средство находится в первой зоне:
основываясь на принятых сообщениях безопасности, прогнозирует, окажется ли первое транспортное средство в пространстве, доступном для головного транспортного средства, когда головное транспортное средство освободит перекресток и перед тем, как сигнал светофора, обращенный к головному транспортному средству, загорится красным светом; и
определяет рекомендацию о том, следует ли пересекать перекресток, основываясь на прогнозе; и
устройство отображения, которое
отображает рекомендацию.
2. Головное транспортное средство по п. 1, в котором одно или более из сообщений безопасности, полученных от первого транспортного средства, включают в себя значение скорости для первого транспортного средства, направление движения первого транспортного средства и местоположение первого транспортного средства.
3. Головное транспортное средство по п. 1, в котором процессор определяет тормозной путь головного транспортного средства.
4. Головное транспортное средство по п. 3, в котором рекомендация о том, следует ли пересекать перекресток, дополнительно основана на тормозном пути головного транспортного средства.
5. Головное транспортное средство по п. 1, в котором одно или более из сообщений безопасности, полученных от неподвижного приемопередатчика, включают в себя такт сигналов светофора, под управлением светофора.
6. Головное транспортное средство по п. 5, в котором рекомендация о том, следует ли пересекать перекресток, основана на времени между переключением одного из сигналов светофоров с зеленого света на красный свет, причем один из сигналов светофоров соответствует направлению движения головного транспортного средства.
7. Головное транспортное средство по п. 1, в котором размеры зон также основаны на состоянии дороги на перекрестке.
8. Способ помощи проезда перекрестков с использованием специализированной связи на коротких расстояниях, содержащий этапы, на которых:
принимают, посредством приемопередатчика специализированной связи на коротких расстояниях головного транспортного средства, сообщения безопасности от неподвижного приемопередатчика и первого транспортного средства на дальней стороне перекрестка и в диапазоне головного транспортного средства; и
до достижения головным транспортным средством перекрестка:
определяют, посредством процессора головного транспортного средства, первую зону между второй и третьей зонами до перекрестка, причем размеры зон основаны на скорости головного транспортного средства; и
когда головное транспортное средство въезжает в первую зону, основываясь на принятых сообщениях безопасности, прогнозируют, посредством процессора головного транспортного средства, окажется ли первое транспортное средство в пространстве, доступном для головного транспортного средства, когда головное транспортное средство освободит перекресток и перед тем, как сигнал светофора, обращенный к головному транспортному средству, загорится красным светом;
определяют, посредством процессора головного транспортного средства, рекомендацию о том, следует ли пересекать перекресток, основываясь на прогнозе; и
отображают на устройстве отображения рекомендацию.
9. Способ по п. 8, в котором одно или более из сообщений безопасности, принятых от первого транспортного средства, включают в себя значение скорости для соответствующего транспортного средства, направление движения соответствующего транспортного средства и местоположение соответствующего транспортного средства.
10. Способ по п. 8, включающий в себя этап, на котором определяют тормозной путь головного транспортного средства.
11. Способ по п. 8, в котором рекомендация о том, следует ли пересекать перекресток, также основана на тормозном пути головного транспортного средства.
12. Способ по п. 8, в котором одно или более из сообщений безопасности, принятых от неподвижного приемопередатчика, включают в себя такт сигналов светофора, под управлением светофора.
13. Способ по п. 12, в котором рекомендация о том, следует ли пересекать перекресток, основана на времени между переключением одного из сигналов светофоров с зеленого света на красный свет, причем один из сигналов светофоров соответствует направлению движения головного транспортного средства.
14. Способ по п. 8, содержащий также этапы, на которых:
определяют, посредством процессора головного транспортного средства, тормозной путь второго транспортного средства сзади головного транспортного средства и траекторию первого транспортного средства; и
и в ответ на то, что (а) тормозной путь указывает, что второе транспортное средство столкнется с головным транспортным средством, если головное транспортное средство остановится и (b) траектория указывает, что не будет достаточного пространства для головного транспортного средства на дальней стороне перекрестка, (i) определяют, что рекомендация включает в себя пересечение перекрестка, и (ii) направляют запрос на первое транспортное средство изменить траекторию, чтобы обеспечить свободное пространство для головного транспортного средства.
15. Транспортное средство, содержащее:
процессор для:
до достижения транспортным средством перекрестка:
приема сообщений безопасности от неподвижного приемопередатчика и других транспортных средств на дальней стороне перекрестка;
основываясь на принятых сообщениях безопасности, прогнозирования, окажется ли другое транспортное средство в пространстве, доступном для транспортного средства, когда транспортное средство освободит перекресток и перед тем, как сигнал светофора, обращенный к транспортному средству, загорится красным светом; и
устройство отображения для отображения рекомендации, следует ли пересекать перекресток, основанной на прогнозе.
| СПОСОБ ИНФОРМИРОВАНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ О ДОРОЖНОЙ ОБСТАНОВКЕ В МЕГАПОЛИСЕ | 2000 |
|
RU2172523C1 |
| JP 2009146288 A, 02.07.2009 | |||
| CN 103903479 A, 02.07.2014 | |||
| CN 104678832 A, 03.06.2015. | |||

