ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к способам калибровки инерциальных датчиков и к инерциальным измерительным устройствам. В частности, изобретение относится к способам автоматической калибровки инерциальных датчиков в полевых условиях, хотя возможны и другие применения.
УРОВЕНЬ ТЕХНИКИ
Точность измерений с использованием инерциальных датчиков существенно зависит от "углового пространственного положения" рабочего оборудования (т.е. от угла поворота рабочего оборудования относительно системы отсчета, обычно гипотетического уровня земной поверхности). В точных агротехнических измерениях знание углового пространственного положения сельскохозяйственного транспортного средства требуется для компенсации движений антенны GNSS-приемника (глобальной навигационной спутниковой системы) из-за неровностей поверхности Земли. При выполнении топографо-геодезических работ GNSS-антенны часто монтируют на мачте, при этом для точного определения положения основания мачты необходимо определить ее угловое пространственное положение.
К инерциальным датчикам относятся гироскопы, которые измеряют угловую скорость, и акселерометры, измеряющие линейное ускорение. Результаты измерений, выполненных с помощью инерциальных датчиков, включают систематическую ошибку и другие ошибки, которые следует компенсировать. Результат измерения инерциальным датчиком можно представить следующим уравнением:
 ,
,
где:
 - значение измеряемой величины, полученное инерциальным датчиком;
- значение измеряемой величины, полученное инерциальным датчиком;
K - масштабный коэффициент (чувствительность) датчика;
a - истинное значение измеряемой величины;
bt - случайная ошибка измерения, произвольно изменяющаяся во времени;
B(T) - температурная ошибка измерения;
ωn - собственные шумы датчика, принимаемые как белый и гауссовский шум.
Приведенное выше уравнение в равной степени применимо как к акселерометрам, так и к гироскопам, измеряющим соответственно ускорение и скорость вращения. Когда рабочее оборудование неподвижно, показания акселерометров включают составляющую, связанную с ускорением свободного падения, величина которой зависит от углового пространственного положения оборудования, а показания гироскопов включают составляющую, связанную со скоростью вращения Земли, при этом эти показания также зависят от углового пространственного положения оборудования. При использовании проградуированных в заводских условиях гироскопов вклад скорости вращения Земли достаточно мал по сравнению с ошибками другого происхождения. Для упрощения анализа такой вклад можно считать нулевым, и это не приведет к значительной погрешности. При достаточном количестве измерений при одной и той же температуре составляющая, связанная с собственными шумами датчика, мала и может быть включена в случайную ошибку. Соответственно, приведенное выше уравнение можно упростить:
 ,
,
где:
- значение измеряемой величины, полученное инерциальным датчиком;
 - истинное значение измеряемой величины с учетом масштабного коэффициента;
- истинное значение измеряемой величины с учетом масштабного коэффициента;
ε - другие ошибки, представленные суммарно в виде отдельного слагаемого.
Основной ошибкой является температурная систематическая ошибка. Температурная ошибка не является величиной постоянной и меняется при изменении температуры в диапазоне рабочих температур инерциальных датчиков. Температурная ошибка не является постоянной величиной и для данной температуры, поскольку она медленно изменяется во времени в связи со старением датчика.
Для компенсации температурной ошибки некоторые проградуированные в заводских условиях гироскопы имеют исходную калибровку, включающую математическую модель упомянутой температурной систематической ошибки. Из-за нехватки времени и ограничения на издержки калибровка может учитывать только действительные (фактические) колебания температуры инерциального датчика в пределах ограниченного температурного диапазона, а не всего диапазона температур, в котором датчик в конечном счете может работать. По мере старения датчика математическая модель температурной ошибки должна корректироваться. Такая корректировка обычно выполняется ежегодно путем калибровки в заводских условиях или путем калибровки с помощью других датчиков (например, с использованием множества GPS-антенн). Однако такие подходы увеличивают расходы и усложняют получение от инерциальных датчиков точных значений углового пространственного положения объекта.
Когда рабочее оборудование, например транспортное средство, работает, трудно отличить изменения сигнала инерциального датчика, вызванные движением машины и вибрацией, от изменений сигнала, обусловленных изменением температуры. Поэтому полезно оценивать выходной сигнал инерциального датчика в период, когда транспортное средство неподвижно.
В патентах US 6374190, US 657795 и US 5297028 описан процесс автоматической калибровки инерциальных датчиков в полевых условиях, при этом использовали выборочные значения сигналов отдельного инерциального датчика и температурного датчика для каждого инерциального датчика, полученные в то время, когда транспортное средство неподвижно, но находится в исправном состоянии и готово к работе. В патенте US 5527003 описан процесс автоматической калибровки в полевых условиях, осуществляемый в течение так называемого "периода, предшествующего выруливанию самолета". В этот период замеряют уход гироскопа во всем температурном диапазоне. Способы автоматической калибровки на месте эксплуатации, изученные по предшествующим патентным документам, в сущности, не свободны от проблем точности измерения, так как полученные во время испытаний сигналы инерциальных датчиков включают погрешности, вызванные вибрацией двигателей транспортных средств. Кроме того, отсчеты берут в ограниченном температурном диапазоне.
Цель настоящего изобретения состоит в попытке преодолеть или, по меньшей мере, ослабить одну или более описанных выше проблем и/или предоставить потребителю полезный или коммерчески выгодный ассортимент возможностей.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Одним из объектов изобретения является способ калибровки инерциальных датчиков, установленных на рабочем оборудовании. Способ включает сбор данных от одного или более инерциальных датчиков и одного или более температурных датчиков, расположенных вблизи инерциальных датчиков, в период, когда оборудование не работает, и корректировку математической модели температурной систематической ошибки для инерциальных датчиков на основе собранных данных от инерциальных датчиков и температурных датчиков.
В предпочтительном варианте при осуществлении способа дополнительно определяют, работает оборудование или нет.
Рабочим оборудованием может быть транспортное средство, при этом работает транспортное средство или не работает, определяют тем, включено оно или выключено.
Рабочим оборудованием может быть топографо-геодезическое оборудование, при этом работает оно или не работает, определяют тем, включено это оборудование или выключено.
В предпочтительном варианте при осуществлении способа дополнительно определяют, испытывает ли рабочее оборудование вибрацию или нежелательные движения в период, когда рабочее оборудование не работает, после чего любые данные, собранные в условиях вибрации или движения, отбрасывают.
Способ может включать корректировку математической модели температурной систематической ошибки, осуществляемую путем ее аппроксимации к собранным данным и корректировки математической модели температурной систематической ошибки за счет коэффициентов функции, описывающей в виде кривой математическую модель температурной систематической ошибки.
Корректировка математической модели температурной систематической ошибки включает сравнение данных, собранных в течение одного цикла, когда рабочее оборудование не работало, с собранными данными предшествовавшего цикла, когда рабочее оборудование не работало, и присвоение большего веса данным, собранным в течение более позднего цикла.
При осуществлении способа на инерциальные датчики и температурные датчики, образующие сенсорную подсистему, периодически подают питание для сбора данных в период, когда рабочее оборудование не работает.
Предпочтительно сбор данных начинают через заранее установленное время после того, как будет выключено рабочее оборудование.
Другим объектом группы изобретений является инерциальное измерительное устройство, включающее сенсорную подсистему, содержащую один или более инерциальных датчиков, один или более температурных датчиков, связанных с инерциальными датчиками, маломощный блок дискретизации, выполненный с возможностью сбора данных от инерциальных датчиков и температурных датчиков, блок обработки, имеющий запоминающее устройство для хранения математической модели температурной систематической ошибки инерциальных датчиков, и регулятор мощности, выполненный с возможностью избирательной подачи питания на сенсорную подсистему для сбора данных от инерциальных датчиков и температурных датчиков во время, когда рабочее оборудование, в котором установлено инерциальное измерительное устройство, не работает.
В предпочтительном варианте осуществления изобретения инерциальное измерительное устройство содержит таймер, который в период, когда оборудование не работает, включает регулятор мощности для периодической подачи энергии на сенсорную подсистему.
В предпочтительном варианте осуществления изобретения маломощный блок дискретизации включает маломощный процессор, а блок обработки включает основной процессор, который потребляет относительно больше энергии, чем маломощный процессор.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предпочтительные варианты осуществления изобретения будут описаны более полно со ссылкой на следующие чертежи.
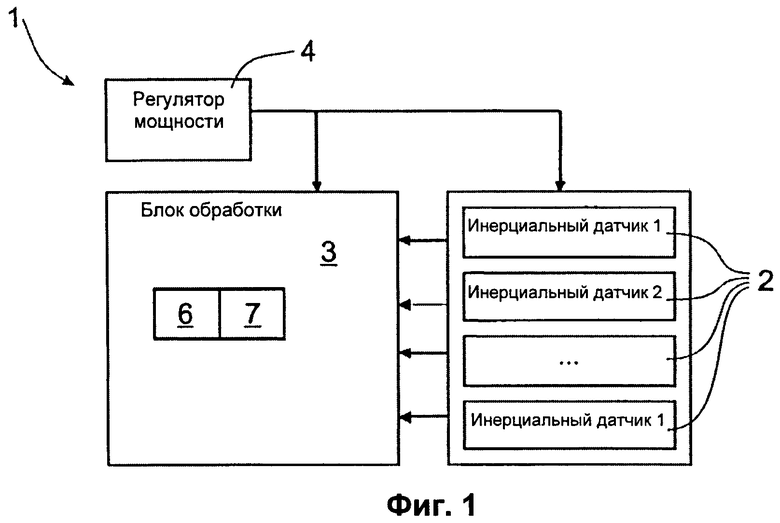
На Фиг.1 показана структурная схема известного инерциального измерительного устройства.
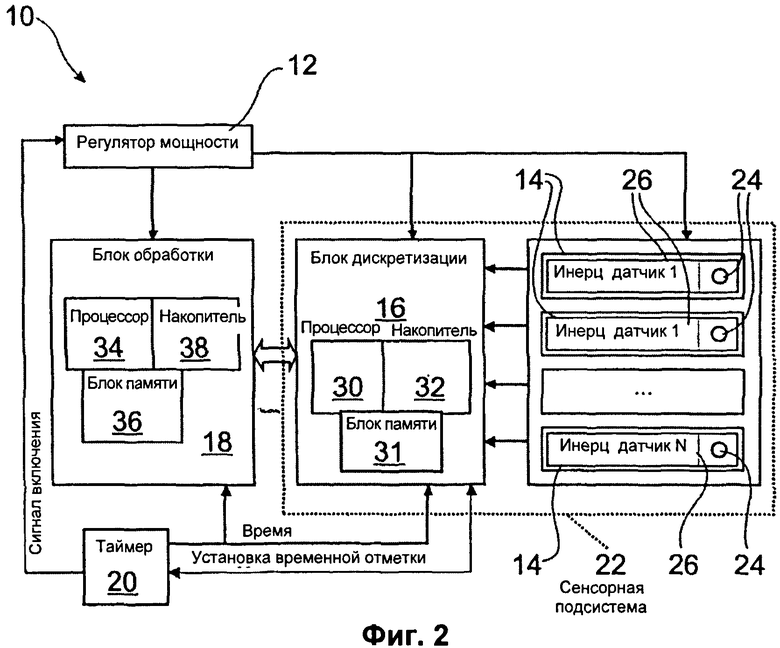
На Фиг.2 представлена структурная схема одного из вариантов осуществления инерциального измерительного устройства в соответствии с настоящим изобретением.
На Фиг.3 представлен алгоритм способа калибровки инерциальных датчиков измерительного устройства с использованием математической модели температурной систематической ошибки.
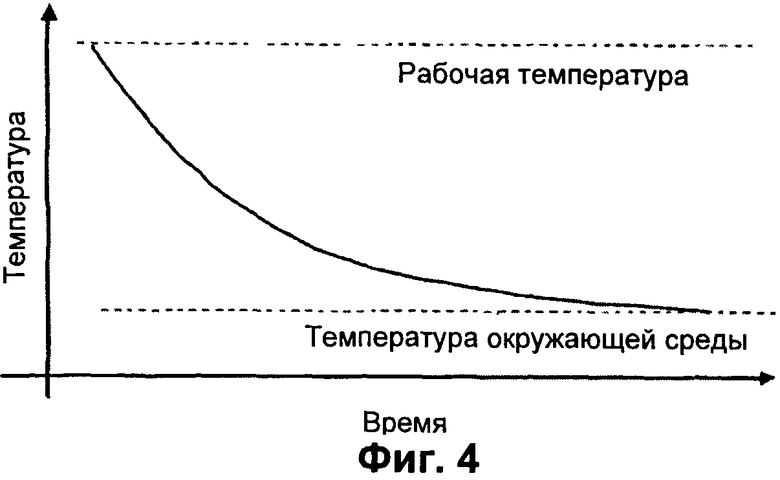
На Фиг.4 представлен график изменения во времени температуры инерциального датчика в стадии охлаждения, когда температура датчика падает от значения рабочей температуры до температуры окружающей среды.
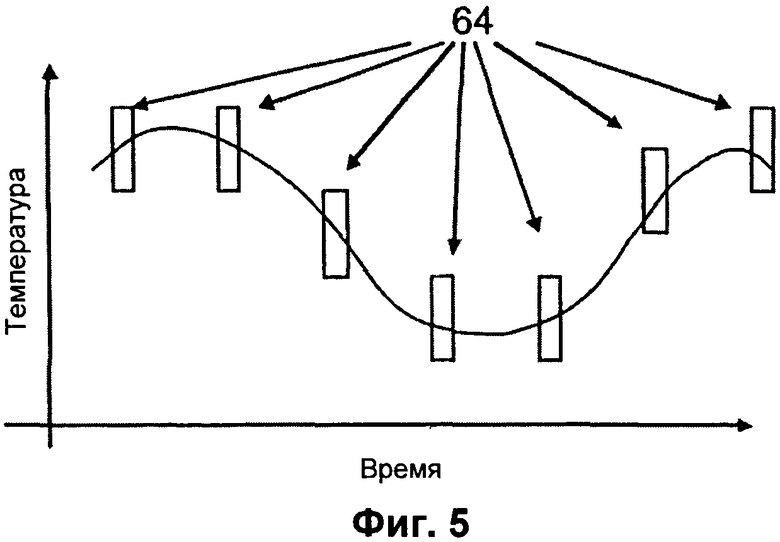
На Фиг.5 представлен график изменения во времени температуры инерциального датчика в ситуации, когда температура окружающей среды с течением времени меняется.
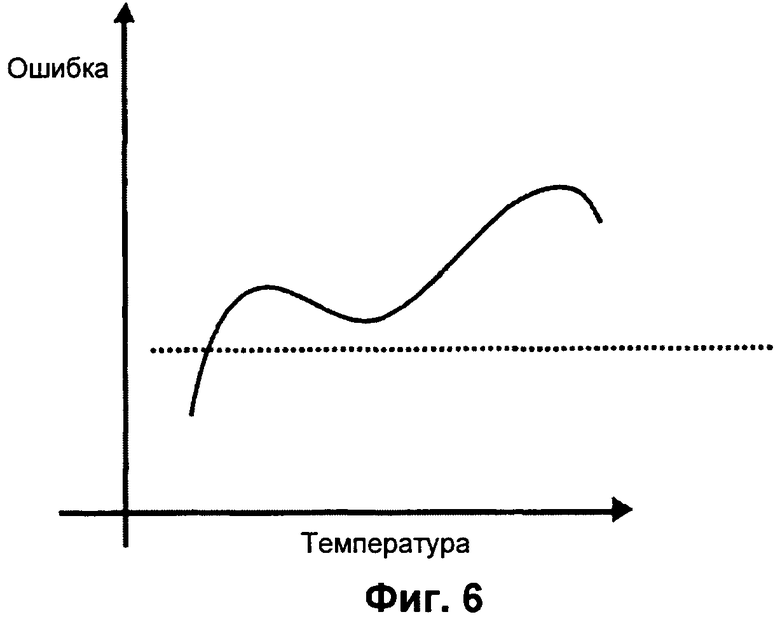
На Фиг.6 показана в виде кривой модель температурной систематической ошибки для инерциального измерительного устройства, представленного на Фиг.2.
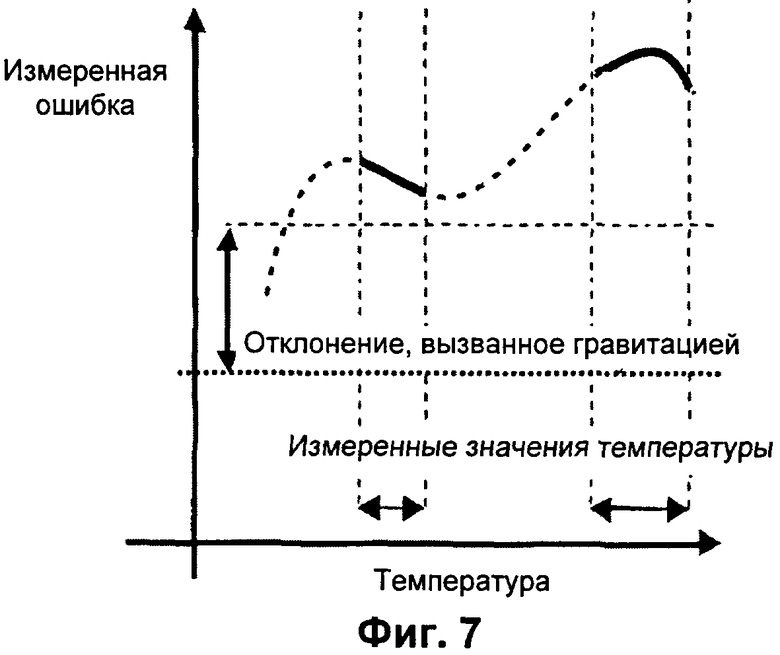
На Фиг.7 показаны участки кривой температурной систематической ошибки, зарегистрированные в режиме дискретизации инерциального измерительного устройства, представленного на Фиг.2.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как показано на Фиг.1, известное инерциальное измерительное устройство 1 содержит один или несколько инерциальных датчиков 2, блок обработки 3 и регулятор мощности 4, управляющий подачей питания на блок обработки 3, и инерциальные датчики 2. Блок обработки 3 содержит процессор 6 и запоминающее устройство 7. Модель температурной систематической ошибки хранится в запоминающем устройстве 7 для каждого инерциального датчика 2. Блок обработки 3 выполнен с возможностью вычисления углового пространственного положения транспортного средства, используя в качестве входных данных сигналы инерциальных датчиков, откорректированные в соответствии с моделью температурной систематической ошибки.
На Фиг.2 представлена структурная схема инерциального измерительного устройства 10, соответствующего одному из вариантов осуществления настоящего изобретения. Инерциальное измерительное устройство 10 в общем случае содержит регулятор мощности 12, блоки 14 инерциальных датчиков, маломощный блок дискретизации 16, блок обработки 18 и таймер 20. Блок 14 инерциальных датчиков и блок дискретизации 16 вместе образуют сенсорную подсистему 22. Инерциальное измерительное устройство 10 описано применительно к работе в составе транспортного средства, в котором оно установлено, однако это устройство может быть установлено в любом другом рабочем оборудовании, использующем инерциальные датчики, например в геодезическом оборудовании.
Регулятор мощности 12 управляет подачей энергии на блоки 14 инерциальных датчиков, блок дискретизации 16 и блок обработки 18. Регулятор мощности 12 выполнен с возможностью независимой подачи питания на сенсорную подсистему 22 и на блок обработки 18. Кроме того, регулятор мощности 12 выполнен с возможностью одновременной подачи питания на сенсорную подсистему 22 и на блок обработки 18 в случае, если инерциальное измерительное устройство 10 осуществляет измерение в то время, когда транспортное средство не работает. Транспортное средство считается работающим, когда оно включено. Регулятор мощности 12 выполнен с возможностью избирательной подачи питания на сенсорную подсистему 22 в режиме дискретизации сигналов инерциального измерительного устройства 10, когда транспортное средство не работает. Транспортное средство считается не работающим, когда оно выключено, и работающим, когда включено. Регулятор мощности 12 определяет, включено транспортное средство или выключено, благодаря тому, что он соединен с замком зажигания транспортного средства. Период между выключением и включением транспортного средства машины называют циклом. В течение каждого цикла транспортное средство обычно имеет определенное фиксированное угловое положение в пространстве, и при этом отсутствует вибрация.
Блоки 14 инерциальных датчиков имеют встроенные температурные датчики 24. В альтернативном варианте (на фигурах не показан) температурные датчики 24 не встроены в блоки 14 инерциальных датчиков, а установлены рядом с блоками 14 инерциальных датчиков. Блоки 14 инерциальных датчиков содержат инерциальные датчики 26, выполненные в виде либо гироскопов, либо акселерометров. Блоки 14 инерциальных датчиков выдают соответствующие сигналы от температурных датчиков 24 и от инерциальных датчиков 26. Сигналы с выходов блоков 14 инерциальных датчиков поступают в блок дискретизации 16.
Блок дискретизации 16 содержит процессор 30 с малым потреблением энергии, блок памяти 31 и накопитель 32. В качестве процессора 30 может быть использован, например, микропроцессор. Информация, содержащаяся в сигналах от инерциальных датчиков 14, записывается в режиме дискретизации инерциального измерительного устройства 10 и хранится в накопителе 32. Блок дискретизации 16 соединен с таймером 20, так что сохраненная в накопителе 32 информация имеет отметку времени о ее сохранении в накопителе 32. Накопитель 32 имеет таблицу соотношения "температура-ошибка", в которой для каждого инерциального датчика 26 в каждом цикле сохранены значения сигнала инерциального датчика и соответствующие значения температуры. Сигналы от инерциальных датчиков 14 передаются в блок обработки 18 через блок дискретизации 16 в режиме измерения инерциального измерительного устройства 10.
Блок обработки 18 содержит основной процессор 34, блок памяти 36 и накопитель 38. Модель температурной систематической ошибки хранится в блоке памяти 36 для каждого инерциального датчика 26. Значение этой ошибки в соответствии с принятой математической моделью рассчитывается основным процессором 34 с использованием хранящихся в накопителе 38 пакетов ранее полученных - старых данных для каждого из датчиков 26 в виде зависимости величины сигнала инерциального датчика от температуры. Старые данные накапливаются из пакетов данных, извлеченных из накопителя 32 блока дискретизации 16, как это описано более подробно ниже.
На Фиг.3 представлен алгоритм способа автоматической калибровки в полевых условиях инерциальных датчиков 26 инерциального измерительного устройства 10, осуществляемого с использованием математической модели температурной систематической ошибки. Автоматическая калибровка инерциальных датчиков 26 выполняется в реальных условиях эксплуатации транспортного средства. В соответствии с данным способом сначала (позиция 40) определяют, работает или не работает транспортное средство, на котором установлено измерительное устройство 10. Работает или не работает транспортное средство - определяется состоянием двигателя: включен он или выключен. Если двигатель выключен (позиция 42), то на инерциальное измерительное устройство (ИИУ) 10 подается питание, обеспечивающее его работу в режиме дискретизации (позиция 44). В режиме дискретизации (позиция 44) на сенсорную подсистему 22 подается питание, при этом на блок обработки 18 питание не подается (позиция 46). Сенсорная подсистема 22 собирает данные от температурных и инерциальных датчиков, поступающие от блоков 14 инерциальных датчиков (позиция 48). Собранные данные сохраняются в накопителе 32 блока дискретизации 16 (позиция 50).
Если транспортное средство работает (позиция 52), на инерциальное измерительное устройство 10 подается питание (позиция 54), обеспечивающее его работу в режиме измерения. В режиме измерения питание подается и на сенсорную подсистему 22, и на блок обработки 18 (позиция 56). Блок обработки 18 считывает данные, хранящиеся в накопителе 32 блока дискретизации 16 (позиция 58). Затем блок обработки 18 в соответствии с принятой математической моделью вычисляет величину температурной систематической ошибки для каждого датчика 26 с использованием данных, полученных из блока дискретизации 16, осуществляя таким образом калибровку датчиков 26 (позиция 60). Сигналы из блоков 14 инерциальных датчиков передаются на блок обработки 18 и корректируются путем учета рассчитанной на шаге 60 величины температурной ошибки (позиция 62).
В режиме измерения сенсорная подсистема 22 и блок обработки 18 включены, так что сигналы, генерируемые инерциальными датчиками 26 и температурными датчиками 24, передаются на блок обработки 18. Основной процессор 34 блока обработки 18 корректирует эти сигналы путем учета рассчитанной температурной ошибки. Одновременно основной процессор 34 выполняет и другие задачи, такие как управление и навигация, расчет пространственного положения и взаимодействие с блоком дискретизации 16. С учетом большого количества решаемых задач основной процессор 34 должен быть более мощным, чем маломощный процессор 30 блока дискретизации 16. Следовательно, потребность основного процессора 34 в энергии больше, чем у маломощного процессора 30 блока 16. Для определения пространственного положения транспортного средства используются откорректированные сигналы. Каждый раз, когда инерциальное измерительное устройство 10 меняет режим дискретизации на режим измерения, блок обработки 18 извлекает из накопителя 32 блока дискретизации 16 сохраненные в нем для этого цикла данные зависимости "сигнал инерциального датчика - температура" и сохраняет их вместе с извлеченными до этого данными в своем накопителе 38.
В режиме дискретизации инерционного измерительного устройства 10 питание подается избирательно на сенсорную подсистему 22, при этом на блок обработки 18 питание не подается. Благодаря этому инерциальное измерительное устройство 10 в режиме дискретизации потребляет минимальное количество энергии. На сенсорную подсистему 22 питание подается на стадии (во время) охлаждения блоков 14 инерциальных датчиков и периодически на стадии (во время) изменения температуры окружающей среды, которая следует за стадией охлаждения.
На Фиг.4 показано изменение температуры блоков 14 инерциальных датчиков на стадии охлаждения, когда их температура падает от рабочей до температуры окружающей среды. Стадия охлаждения наступает сразу же после выключения транспортного средства. Блок дискретизации 16 может задержать введение данных на заданный отрезок времени после выключения транспортного средства во избежание записи данных во время выхода оператора из транспортного средства. В альтернативном случае данные, записанные во время выхода оператора из транспортного средства, должны быть проигнорированы, поскольку могут содержать ошибку, связанную с вибрацией транспортного средства, вызванной выходом оператора. Оператор, выходя из транспортного средства, создает вибрации, поэтому любая информация, записанная в это время, будет непригодной для расчета температурной ошибки по математической модели. Обычно температура блоков 14 инерциальных датчиков снижается от рабочей температуры (которая может быть значительно выше температуры окружающей среды) до температуры окружающей среды в течение относительно короткого временного интервала. На стадии охлаждения блок дискретизации 16 осуществляет ввод данных непрерывно до тех пор, пока не истечет время работы системы или пока датчики температуры 24 не обнаружат прекращения существенных изменений температуры.
Как показано на Фиг.5, в течение того отрезка времени, когда блоки 14 инерциальных датчиков фиксируют изменение температуры окружающей среды, на сенсорную подсистему 22 периодически подается питание. Упомянутым отрезком времени, когда меняется температура окружающей среды, можно считать, например, ночной период, когда транспортное средство поставлено на стоянку. Поскольку температура окружающей среды изменяется во времени медленно, можно осуществлять сбор данных только периодически. Маломощный процессор 30 устанавливает в таймере 20 временные отметки для периодической подачи питания на сенсорную подсистему 22 через регулятор мощности 12. Благодаря периодичности подачи питания на сенсорную подсистему 22 минимизируется потребление мощности от батареи транспортного средства. Энергопотребление маломощным процессором 30 таково, что подсистема 22 может функционировать без существенного потребления энергии от батареи транспортного средства. Периодичность проводимых измерений (сбора данных) во время изменения температуры окружающей среды показана на Фиг.5 позициями 64. Выполнение дискретных измерений во время изменения температуры окружающей среды чрезвычайно полезно, так как предусматривает возможность ввода данных в более широком диапазоне температур, чем обычный, предусмотренный заводской калибровкой, или свойственный стадии охлаждения.
Известно, что существует проблема коррекции математической модели температурной ошибки для временного интервала, в течение которого инерциальные датчики 26 нагреваются от температуры окружающей среды до рабочей температуры, когда машина стартует, что связано с отсутствием данных в этом температурном диапазоне. Эта проблема особенно ощутима, если температура окружающей среды значительно ниже рабочей температуры. Некоторые транспортные средства (такие как воздушные летательные аппараты) требуют "периода разогрева", прежде чем можно будет использовать показания для вычислений. Преимущества настоящего изобретения очевидны для транспортных средств, при эксплуатации которых водитель может и не знать, что используются инерциальные датчики (например, в сельскохозяйственных машинах). Важно иметь данные для коррекции температурной ошибки во всем диапазоне как рабочей температуры, так и температуры окружающей среды. Изобретение предусматривает возможность обнаружения инерциальными датчиками 26 движения или вибраций в период дискретизации. Данные, полученные в этих условиях, будут проигнорированы, а подсистема 22 будет временно отключена от источника питания. Осуществление дискретизации каждый раз, когда транспортное средство не работает, обеспечивает для каждого цикла отличный от других пакет данных, загружаемых и хранящихся в накопителе 32 блока дискретизации 16.
На Фиг.6 изображена кривая температурной ошибки, вычисленной в соответствии с математической моделью для каждого инерциального датчика 26 и хранящейся в блоке памяти 36 блока обработки 18. Каждый инерциальный датчик 26 имеет свою индивидуальную кривую температурной ошибки, поэтому данные из блоков 14 инерциальных датчиков вводятся независимо для каждого инерциального датчика 26.
На Фиг.7 показаны участки упомянутой кривой температурной систематической ошибки, записанные в то время, когда инерциальное измерительное устройство 10 работает в режиме дискретизации. Каждый раз, когда транспортное средство ставят на стоянку, оно занимает различное угловое положение в течение различных циклов измерения, при этом данные, измеренные для акселерометра в режиме дискретизации, будут отклоняться от действительного значения ошибки. На Фиг.7 это показано линией "Отклонение, вызванное гравитацией". В разные периоды, когда инерциальное измерительное устройство 10 работает в режиме дискретизации, будут наблюдаться различные участки кривой температурной ошибки и почти наверняка при различных уровнях отклонения. Когда получено достаточное количество данных на основе сигналов инерциального датчика, может быть рассчитана истинная кривая температурной ошибки на основании нескольких разрозненных участков кривых, как описано ниже.
Предположим, что кривую температурной ошибки можно описать как полином n-го порядка, то есть:

До начала расчета порядок полинома не известен и должен быть принят гипотетически. Как описано в разделе "Уровень техники", математическая модель измерения инерциальным датчиком представляет собой уравнение:
 .
.
После нескольких циклов сбора данных от инерциального датчика в режиме дискретизации в блоке хранения 38 блока обработки 18 будет m пакетов данных от инерциального датчика. Каждый пакет содержит mk отсчетов различных значений температуры, различных результатов измерений инерциального датчика, различную шумовую составляющую и временные отметки. Поскольку параметр инерции будет величиной постоянной для каждого пакета данных благодаря фиксированному отклонению машины и отсутствию вибраций в течение измерительного цикла, каждая индивидуальная модель имеет вид:
 .
.
Например, четвертое измерение второго пакета примет вид:
 .
.
и тогда формальная запись с учетом вклада от величин инерции от других пакетов измерений будет:
 .
.
Поскольку все частные кривые температурной ошибки будут иметь количественную компоненту, характеризующую физическую инерционность (за исключением случая, когда предполагается, что гироскоп принимает скорость вращения Земли равной нулю), для расчета параметра b0 требуется абсолютное измерение или оценка ошибки при частных значениях температур. Этого можно достичь несколькими способами, такими как:
- исходная заводская калибровка;
- последовательность (ряд) заранее предопределенных маневров транспортного средства;
- в случаях, когда применимы все 3 оси ускорения и вращения, ошибка может быть рассчитана для каждого датчика на основе, по меньшей мере, 6 величин;
- дополнительные датчики, такие как глобальная система позиционирования или многоэлементная антенна GPS.
Так как в этих случаях известны или ошибка при частных значениях температуры или ускорение, имеем i измерений ошибки, удовлетворяющих следующему уравнению:
 .
.
После того, как учтен вклад от углового положения каждой группы частных кривых температурной ошибки, получаем:
 .
.
Соответственно, группы измерений (включая абсолютные измерения) образуют систему линейных уравнений:


…



…

…



…

Ошибки ε могут быть описаны как нулевое среднее, как дополнительное слагаемое, как белый и нормальный шум с ковариационной матрицей Σ. Эффект старения инерциального датчика можно учитывать путем увеличения меры ковариации измерений, опирающихся на прошлое измерение. Если использовать весовую характеристику, то более давние измерения будут менее выделены, при этом они будут использованы в более поздних измерениях. Это будет полезно, например, в случае, когда транспортное средство оказалось подвергнутым внезапной непогоде осенью. Последние записанные данные в диапазоне температур холодной погоды могут не наблюдаться в течение нескольких месяцев, однако они важны для такой ситуации, даже если имеются сомнения в их точности.
Система линейных уравнений может быть представлена в виде матрицы:
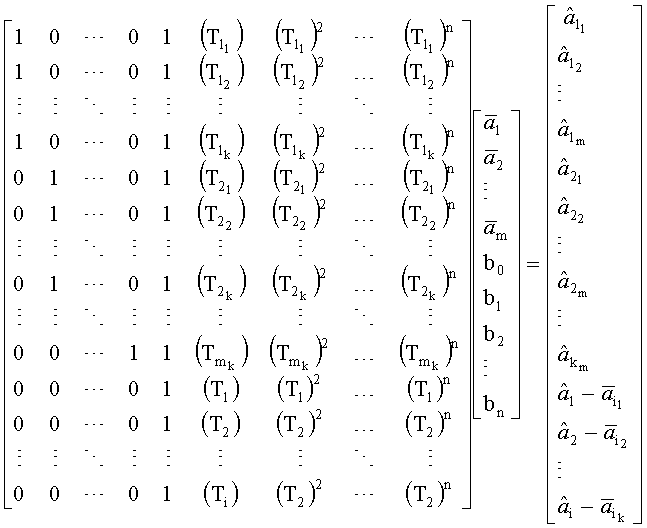
В сжатом виде матрицу можно записать в виде Xβ=y.
Значения β (и, следовательно, полиномиальных коэффициентов кривой температурной ошибки для каждого инерциального датчика 26) могут быть получены с использованием линейного расчета по методу наименьших квадратов. Когда полиномиальные коэффициенты определены, их используют в модели температурной систематической ошибки в режиме измерения инерциального измерительного устройства 10 для компенсации температурной ошибки инерциальных датчиков 26.
Заявитель предвидит, что в связи с техническими достижениями процессоры и запоминающие устройства будут потреблять меньше энергии. Тогда маломощный процессор 30 может быть выполнен достаточно производительным, чтобы вся обработка данных и их хранение могли выполняться полностью блоком дискретизации 16 без значительного энергопотребления от батареи транспортного средства в режиме дискретизации. Блок обработки 18 в этом случае будет не нужен.
Заявляемые способ и инерциальное измерительное устройство 10 в значительной степени облегчают автокалибровку инерциальных датчиков 26 без особых действий со стороны пользователя и без привлечения дополнительных датчиков или периодической заводской повторной калибровки.
Минус автокалибровки в полевых условиях, как это описано в известных патентах, состоит в том, что транспортные средства не выключают на время дискретизации сигналов инерциальных датчиков, так что транспортные средства подвержены вибрации из-за работы двигателя и оператора. Одной из особенностей настоящего изобретения является то, что ввод данных от инерциальных датчиков и соответствующих температурных датчиков осуществляется во время, когда рабочее оборудование не работает и двигатель отключен.
До недавнего времени инерциальные датчики и связанные с ними схемы обработки требовали для своего функционирования значительных энергетических затрат. Существовал риск, что батарея транспортного средства разрядится, если инерциальные датчики и связанные с ними электронные схемы обработки будут работать, когда транспортное средство выключено. Технические достижения в области датчиков и встроенных элементов вычислительной техники существенно понизили требования к потребляемой энергии, что позволило сенсорной подсистеме 22 функционировать в то время, когда транспортное средство поставлено на стоянку и обездвижено, как говорилось выше при описании чертежей. В ситуации, когда блок обработки 18 (потребляющий относительно большое количество энергии) отключен во время режима дискретизации, а на блок дискретизации (потребляющий относительно мало энергии) питание подается только в режиме дискретизации, инерциальное измерительное устройство 10 может работать без существенного потребления энергии от батареи транспортного средства.
Приведенное выше описание различных вариантов осуществления изобретения адресовано среднему специалисту в данной области. Описание не является исчерпывающим и не ограничивает изобретение каким-либо одним вариантом реализации. Как упоминалось выше, различные альтернативы и варианты могут быть очевидными для специалиста. Например, в описании говорится об использовании инерциального измерительного устройства 10 применительно к транспортному средству. Однако упомянутое измерительное устройство может быть применено для другого работающего оборудования, которое использует инерциальные датчики, такого как геодезическое мачтовое снаряжение GNSS, а также в устройствах, где измеряют угол подвижного устройства относительно транспортного средства (например, отвала бульдозера относительно бульдозера - тягача). Кроме того, инерциальное измерительное устройство 10 может быть использовано в инерциальных навигационных системах или в инерциальных навигационных системах в сочетании с глобальной системой позиционирования, в роботах, в частности в промышленных роботах. Некоторые варианты осуществления изобретения были детально описаны, другие варианты очевидны или могут быть разработаны специалистами в данной области. Таким образом, данное изобретение охватывает все альтернативы, модификации и варианты, которые не представлены в описании, но находятся в рамках сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизации калибровки датчиков бесплатформенной инерциальной системы роботизированного беспилотного летательного аппарата | 2020 |
|
RU2751143C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ И КОЛЕБАНИЙ ПОДВИЖНЫХ СТРУКТУР | 2014 |
|
RU2636412C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2385447C2 |
| Способ компенсации температурных погрешностей инерциального измерительного блока систем ориентации и навигации | 2020 |
|
RU2758339C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Способ калибровки погрешностей инерциального измерительного блока на базе лазерных гироскопов с использованием динамического стенда | 2021 |
|
RU2803878C2 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| СПОСОБ ПОСТРОЕНИЯ ЦИФРОВОЙ ИСПОЛНИТЕЛЬНОЙ ИНЖЕНЕРНО-РАДИАЦИОННОЙ МОДЕЛИ ОСТАНОВЛЕННОГО ДЛЯ ВЫВОДА ИЗ ЭКСПЛУАТАЦИИ ОБЪЕКТА ИСПОЛЬЗОВАНИЯ АТОМНОЙ ЭНЕРГИИ ПРИ ВЫПОЛНЕНИИ КОМПЛЕКСНОГО ИНЖЕНЕРНОГО И РАДИАЦИОННОГО ОБСЛЕДОВАНИЯ УКАЗАННОГО ОБЪЕКТА И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ УКАЗАННОГО СПОСОБА | 2022 |
|
RU2815600C1 |
| СИСТЕМА МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2800560C1 |
Предложенное изобретение относится к средствам калибровки инерциальных датчиков, в частности, в полевых условиях. Предложенный способ калибровки инерциальных датчиков, установленных на рабочем оборудовании, включает в себя сбор данных от одного или более инерциальных датчиков и одного или более температурных датчиков, расположенных вблизи инерциальных датчиков, в период, когда оборудование не работает, и корректировку математической модели температурной систематической ошибки для инерциальных датчиков на основе собранных данных от инерциальных датчиков и температурных датчиков, при этом сбор данных начинают через заранее установленное время после выключения рабочего оборудования, при этом на инерциальные датчики и температурные датчики, образующие сенсорную подсистему, периодически подают питание для сбора данных в период, когда рабочее оборудование не работает. Инерциальное измерительное устройство, реализующее указанный способ, включает сенсорную подсистему, содержащую один или более инерциальных датчиков, один или более температурных датчиков, связанных с инерциальными датчиками, маломощный блок дискретизации, выполненный с возможностью сбора данных от инерциальных датчиков и температурных датчиков, блок обработки, имеющий запоминающее устройство для хранения математической модели температурной систематической ошибки инерциальных датчиков, и регулятор мощности, выполненный с возможностью избирательной подачи питания на сенсорную подсистему для сбора данных от инерциальных датчиков и температурных датчиков во время, когда рабочее оборудование, в котором установлено инерциальное измерительное устройство, не работает. Данная группа изобретений позволяет при калибровке датчиков исключить погрешности, обусловленные вибрацией двигателей транспортных средств, на которых такие датчики установлены. 2 н. и 10 з.п. ф-лы, 7 ил.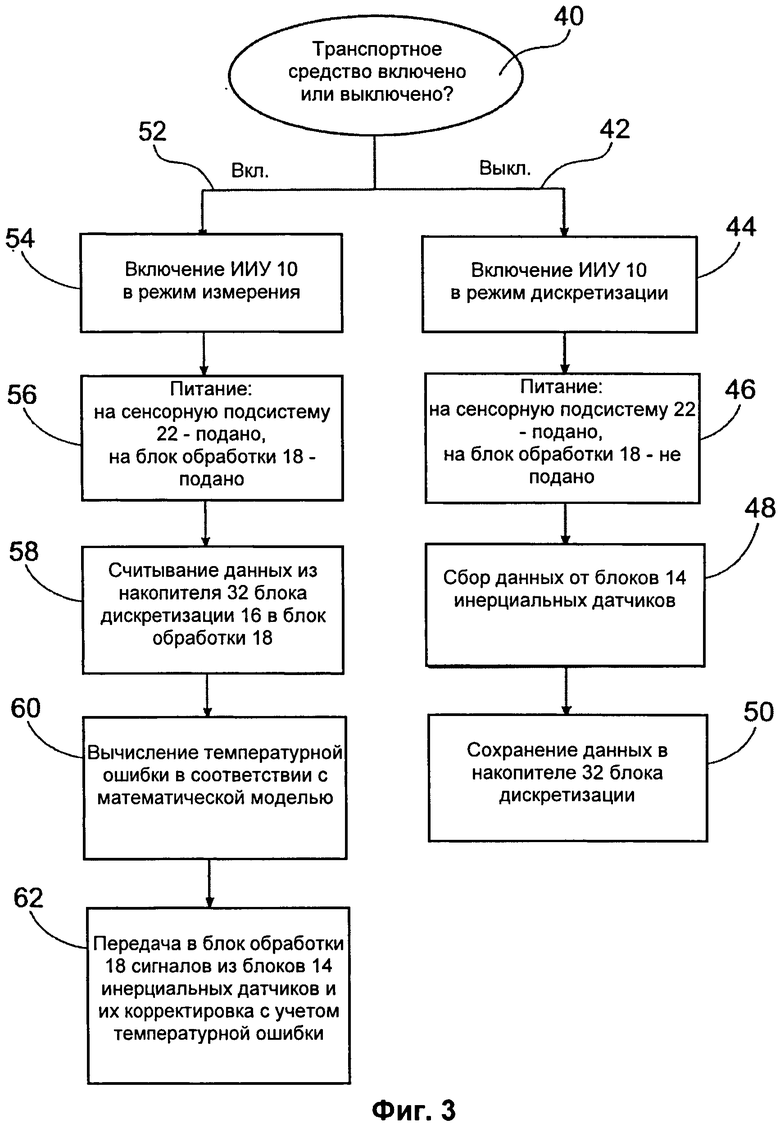
1. Способ калибровки инерциальных датчиков, установленных на рабочем оборудовании, включающий сбор данных от одного или более инерциальных датчиков и одного или более температурных датчиков, расположенных вблизи инерциальных датчиков, в период, когда оборудование не работает, и корректировку математической модели температурной систематической ошибки для инерциальных датчиков на основе собранных данных от инерциальных датчиков и температурных датчиков, при этом сбор данных начинают через заранее установленное время после выключения рабочего оборудования, при этом на инерциальные датчики и температурные датчики, образующие сенсорную подсистему, периодически подают питание для сбора данных в период, когда рабочее оборудование не работает.
2. Способ по п.1, характеризующийся тем, что дополнительно определяют, работает оборудование или нет.
3. Способ по п.2, характеризующийся тем, что рабочим оборудованием является транспортное средство, при этом работает транспортное средство или не работает, определяют тем, включено оно или выключено.
4. Способ по п.2, характеризующийся тем, что рабочим оборудованием является транспортное средство, при этом работает оно или не работает, определяют тем, работает двигатель транспортного средства или не работает.
5. Способ по п.2, характеризующееся тем, что рабочим оборудованием является топографо-геодезическим оборудованием, при этом работает оно или не работает, определяют тем, включено это оборудование или выключено.
6. Способ по п.1, характеризующийся тем, что дополнительно определяют, испытывает ли рабочее оборудование вибрацию или нежелательные движения в период, когда рабочее оборудование не работает, после чего любые данные, собранные в условиях вибрации или движения, отбрасывают.
7. Способ по п.1, характеризующийся тем, что корректировку математической модели температурной систематической ошибки осуществляют путем ее аппроксимации к собранным данным и корректировки математической модели температурной систематической ошибки за счет коэффициентов функции, описывающей в виде кривой математическую модель температурной систематической ошибки.
8. Способ по п.1, характеризующийся тем, что корректировка математической модели температурной систематической ошибки включает сравнение данных, собранных в течение одного цикла, когда рабочее оборудование не работало, с собранными данными предшествовавшего цикла, когда рабочее оборудование не работало, и присвоение большего веса данным, собранным в течение более позднего цикла.
9. Инерциальное измерительное устройство, включающее сенсорную подсистему, содержащую один или более инерциальных датчиков, один или более температурных датчиков, связанных с инерциальными датчиками, маломощный блок дискретизации, выполненный с возможностью сбора данных от инерциальных датчиков и температурных датчиков, блок обработки, имеющий запоминающее устройство для хранения математической модели температурной систематической ошибки инерциальных датчиков, и регулятор мощности, выполненный с возможностью избирательной подачи питания на сенсорную подсистему для сбора данных от инерциальных датчиков и температурных датчиков во время, когда рабочее оборудование, в котором установлено инерциальное измерительное устройство, не работает.
10. Инерциальное измерительное устройство по п.9, характеризующееся тем, что включает таймер, который в период, когда оборудование не работает, включает регулятор мощности для периодической подачи энергии на сенсорную подсистему.
11. Устройство по п.9, характеризующееся тем, что маломощный блок дискретизации включает маломощный процессор, а блок обработки включает основной процессор, который потребляет относительно больше энергии, чем маломощный процессор.
12. Устройство по п.9, характеризующееся тем, что оно выполнено с возможностью сбора данных от инерциальных датчиков и температурных датчиков с задержкой на заранее установленное время после выключения рабочего оборудования.
| US 5527003 A, 18.06.1996 | |||
| Многоэлементный пьезоэлектрический преобразователь | 1984 |
|
SU1221586A1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1988 |
|
RU2083954C1 |
| US 6487480 B2, 26.11.2002 | |||
| US 6374190 B2, 16.04.2002 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 6175807 A, 16.01.2001 | |||
| СПОСОБ КАЛИБРОВКИ АКСЕЛЕРОМЕТРОВ | 2002 |
|
RU2249793C2 |
| US 6834528 B2, 28.12.2004 RU 61789 U1, 10.03.2007 | |||

