Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройствам для управления вращающейся электрической машиной, которая подает мощность приведения в движение на ведущее колесо транспортного средства через кинематическую цепь.
Уровень техники
[0002] Такие устройства управления включают в себя устройство управления для подавления вибрационных частотных компонентов, возникающих из кинематической цепи, которое, например, раскрыто в следующем патентном документе 1. Подробно, устройство управления, которое устанавливается в транспортном средстве, фильтрует целевой крутящий момент для электромотора в качестве примера вращающихся электрических машин, чтобы подавлять такие вибрационные частотные компоненты, содержащиеся в целевом крутящем моменте. Затем устройство управления управляет фактическим выходным крутящим моментом электромотора с использованием фильтрованного целевого крутящего момента.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация патента (Япония) № 5324623
Сущность изобретения
Техническая задача
[0004] Управление фактическим выходным крутящим моментом электромотора на основе фильтрованного целевого крутящего момента может снижать скорость отклика при управлении по сравнению с управлением фактическим выходным крутящим моментом идентичного электромотора на основе нефильтрованного целевого крутящего момента. Управление фактическим выходным крутящим моментом электромотора относительно фильтрованного целевого крутящего момента в силу этого может вызывать такой недостаток, как ухудшение общей характеристики управляемости транспортного средства водителем, в некоторых ситуациях, когда требуется более высокая скорость отклика при управлении крутящим моментом электромотора, включающих в себя ситуацию, когда водитель хочет заставлять транспортное средство быстро маневрировать.
[0005] Настоящее изобретение имеет главную цель в том, чтобы предоставлять устройства управления для вращающихся электрических машин; каждое из устройств управления допускает уменьшение недостатка вследствие фильтрации целевого крутящего момента с тем, чтобы подавлять вибрационный частотный компонент, включенный в целевой крутящий момент.
Средство решения проблемы
[0006] Далее описывается средство для разрешения проблемы, а также операции и достигаемые преимущества средства.
[0007] Один аспект настоящего изобретения заключается в устройстве управления для вращающейся электрической машины транспортного средства. Транспортное средство оснащено кинематической цепью для передачи мощности, выводимой из вращающейся электрической машины, на ведущее колесо. Устройство управления включает в себя процессор фильтрации, который фильтрует целевой крутящий момент для вращающейся электрической машины с тем, чтобы подавлять вибрационный частотный компонент кинематической цепи, с использованием фильтра, имеющего передаточную частотную характеристику. Устройство управления включает в себя контроллер, который выполняет управление приведением в действие вращающейся электрической машины согласно фильтрованному целевому крутящему моменту. Устройство управления включает в себя модуль вычисления параметров, который вычисляет, согласно состоянию движения транспортного средства, параметр, ассоциированный с запрашиваемым значением для скорости отклика по выходному крутящему моменту вращающейся электрической машины относительно целевого крутящего момента. Устройство управления включает в себя модуль переменного задания, который переменно задает передаточную частотную характеристику фильтра таким образом, чтобы уменьшать степень затухания вибрационного частотного компонента с увеличением запрашиваемого значения для скорости отклика по выходному крутящему моменту.
[0008] Устройство управления согласно одному аспекту настоящего изобретения вычисляет параметр, ассоциированный с запрашиваемым значением для скорости отклика по выходному крутящему моменту вращающейся электрической машины, согласно состоянию движения транспортного средства. Таким образом, вычисленный параметр выступает в качестве параметра для вычисления того, как задается скорость отклика по выходному крутящему моменту или для вращающейся электрической машины, т.е. скорость отклика при управлении крутящим моментом. Один аспект настоящего изобретения переменным образом задает передаточную частотную характеристику фильтра таким образом, чтобы уменьшать степень затухания вибрационного частотного компонента при вычислении, на основе параметра, увеличения запрашиваемого значения для скорости отклика по выходному крутящему моменту.
Он уменьшает задержку по фазе передаточных характеристик фильтра, за счет этого уменьшая задержку реакции выходного значения из фильтра в ответ на входное значение в фильтр.
Он выполняет увеличение скорости отклика при управлении крутящим моментом до увеличения степени затухания вибрационного частотного компонента, если запрашиваемое значение для скорости отклика при управлении крутящим моментом увеличивается, к примеру, если возникает ситуация, когда водитель имеет намерение заставлять транспортное средство быстро маневрировать.
Дополнительно, один аспект настоящего изобретения выполняет увеличение степени затухания вибрационного частотного компонента до увеличения скорости отклика при управлении крутящим моментом, если запрашиваемое значение для скорости отклика при управлении крутящим моментом снижается, к примеру, если возникает ситуация, когда водитель имеет намерение обеспечивать движение транспортного средства VEH с более высокой степенью комфорта.
Таким образом, один аспект настоящего изобретения уменьшает недостаток вследствие фильтрации целевого крутящего момента.
Краткое описание чертежей
[0009] Фиг. 1 является блок-схемой, схематично иллюстрирующей пример структуры системы управления, установленной в транспортном средстве согласно первому варианту осуществления настоящего изобретения;
Фиг. 2 является блок-схемой, схематично иллюстрирующей пример структуры второго ECU, проиллюстрированного на фиг. 1;
Фиг. 3A является графиком, схематично иллюстрирующим то, как кривые фильтрованного целевого крутящего момента MG изменяются во времени; кривые соответствуют различным значениям целевого коэффициента затухания;
Фиг. 3B является графиком, схематично иллюстрирующим то, как кривые выходного крутящего момента ведущего вала, проиллюстрированного на фиг. 1, изменяются во времени; кривые соответствуют различным значениям целевого коэффициента затухания;
Фиг. 4 является блок-схемой, схематично иллюстрирующей пример структуры второго ECU согласно второму варианту осуществления настоящего изобретения;
Фиг. 5 является блок-схемой и структурной схемой, схематично иллюстрирующей пример структуры системы управления, установленной в транспортном средстве согласно третьему варианту осуществления настоящего изобретения; и
Фиг. 6 является графиком, схематично иллюстрирующим то, как каждое из запрашиваемого крутящего момента, целевого крутящего момента MG и фактического выходного крутящего момента электромотора-генератора согласно третьему варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0010] Далее описываются варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. В вариантах осуществления, аналогичные части между вариантами осуществления, которым назначаются аналогичные ссылки с номерами, опускаются или упрощаются, чтобы не допускать избыточного описания.
Первый вариант осуществления
Далее описывается первый вариант осуществления, в котором устройство управления согласно настоящему изобретению применяется к транспортному средству, оснащенному вращающейся электрической машиной, которая выступает в качестве только главного двигателя транспортного средства.
[0011] Ссылаясь на фиг. 1, транспортное средство VEH включает в себя электромотор-генератор 10 (MG), инвертор 12, аккумулятор 14, ведущий вал 16 и ведущие колеса 18. Транспортное средство VEH также включает в себя первый электронный модуль 30 управления (ECU) и второй ECU 32.
[0012] Электромотор-генератор 10 выступает как в качестве электромотора, так и в качестве генератора; электромотор выступает в качестве источника приведения для обеспечения движения транспортного средства VEH. Первый вариант осуществления использует многофазную вращающуюся машину, в частности, трехфазную вращающуюся машину, включающую в себя трехфазные обмотки (обмотки U-, V-, W-фазы), в качестве электромотора-генератора 10. В частности, первый вариант осуществления допускает использование, например, трехфазного синхронного электромотора в качестве электромотора-генератора 10.
Трехфазный управляемый напряжением инвертор используется в качестве инвертора 12, когда трехфазная вращающаяся машина используется в качестве электромотора-генератора 10. Инвертор 12 преобразует постоянное напряжение, выводимое из аккумулятора 14, в переменное напряжение и прикладывает переменное напряжение к электромотору-генератору 10. Это приложение напряжения приводит к тому, что электромотор-генератор 10 выступает в качестве электромотора. Напротив, электромотор-генератор 10 выступает в качестве генератора на основе мощности приведения в движение, принимаемой из ведущего вала 16.
[0013] Электромотор-генератор 10 имеет ротор 10r и выходной вал 10a, который упоминается в качестве выходного вала 10a электромотора, соединенный с ротором 10r.
С выходным валом 10a соединяются ведущие колеса 18 через ведущий вал 16. Первый вариант осуществления задает, например, кинематическую цепь, включающую в себя выходной вал 10a электромотора и ведущий вал 16.
[0014] Транспортное средство VEH дополнительно включает в себя датчик 20 частоты вращения. Датчик 20 частоты вращения измеряет частоту вращения выходного вала 10a электромотора, т.е. ротора 10r, которая упоминается в качестве частоты вращения электромотора. Значение измерения датчика 20 частоты вращения вводится во второй ECU 32. Следует отметить, что первый вариант осуществления может предоставлять датчик в транспортном средстве VEH; датчик допускает измерение электрического угла вращения или электрической угловой скорости вращения ротора 10r электромотора-генератора 10. В этом случае, второй ECU 32 может вычислять частоту Nm вращения электромотора согласно измеренному электрическому углу вращения или электрической угловой частоте вращения ротора 10r.
Транспортное средство VEH дополнительно включает в себя датчики тока. Датчики тока сконфигурированы с возможностью измерять токи, протекающие, по меньшей мере, через две обмотки, например, обмотки V- и W-фазы, в трехфазных обмотках электромотора-генератора 10, в качестве токов V- и W-фазы. Затем датчики тока отправляют измеренные токи V- и W-фазы во второй ECU 32.
[0015] Каждый из первого и второго ECU 30 и 32 сконструирован в качестве, например, микрокомпьютера, включающего в себя, например, CPU, ROM, RAM и модуль ввода-вывода. Каждый из первого и второго ECU 30 и 32, т.е. соответствующий CPU, выполняет различные программы, сохраненные, например, в ROM. Первый и второй ECU 30 и 32 сконфигурированы с возможностью обмениваться информацией друг с другом.
[0016] Первый ECU 30 находится выше в иерархии второго ECU 32. Таким образом, первый ECU 30 представляет собой, например, вышележащий модуль управления относительно второго ECU 32 в потоке адресации пользовательских запросов транспортного средства. Например, первый ECU 30 контролирует общее управление транспортного средства VEH. В частности, первый ECU 30 определяет целевой крутящий момент, называемый целевым крутящим моментом Tm* MG для электромотора-генератора 10, согласно измерительным сигналам, включающим в себя, например:
(1) Рабочую величину (нажатия) от пользователя, т.е. ход Acc нажимаемой пользователем педали акселератора транспортного средства VEH, который упоминается в качестве рабочего хода Acc педали акселератора.
(2) Рабочую величину (нажатия) от пользователя, т.е. ход Brk нажимаемой пользователем педали тормоза транспортного средства VEH, который упоминается в качестве рабочего хода Brk педали тормоза.
(3) Скорость V движения транспортного средства VEH.
В первом варианте осуществления, если целевой крутящий момент Tm* MG является положительным, режим управления инвертора 12 посредством второго ECU 32 задается как режим движения за счет электрической мощности для инструктирования электромотору-генератору 10 выступать в качестве электромотора. Напротив, если целевой крутящий момент Tm* MG является отрицательным, режим управления инвертора 12 посредством второго ECU 32 задается как рекуперативный режим для инструктирования электромотору-генератору 10 выступать в качестве генератора. В частности, первый вариант осуществления увеличивает значение целевого крутящего момента Tm* MG с увеличением рабочего хода Acc педали акселератора в режиме движения за счет электрической мощности.
Рабочий ход Brk педали тормоза представляет значение запрашиваемого водителем тормозного крутящего момента для замедления транспортного средства VEH. Другими словами, второй ECU 32 вычисляет значение запрашиваемого водителем тормозного крутящего момента для замедления транспортного средства VEH согласно рабочему ходу Brk педали тормоза.
Помимо этого, первый ECU 30 выводит целевой крутящий момент Tm* MG во второй ECU 32.
Например, в первом варианте осуществления, датчик 36 нажатия педали акселератора предоставляется с возможностью измерять рабочий ход Acc педали акселератора и отправлять рабочий ход Acc педали акселератора в первый ECU 30. Например, в первом варианте осуществления, датчик 38 нажатия педали тормоза предоставляется с возможностью измерять рабочий ход Brk педали тормоза и отправлять рабочий ход Brk педали тормоза в первый ECU 30. Например, в первом варианте осуществления, датчик 40 скорости транспортного средства предоставляется с возможностью измерять скорость V движения транспортного средства VEH и отправлять скорость V движения в первый ECU 30.
[0017] Второй ECU 32 выступает в качестве модуля управления для управления электромотором-генератором 10. Второй ECU 32 принимает целевой крутящий момент Tm* MG, рабочий ход Acc педали акселератора, рабочий ход Brk педали тормоза и скорость V движения, вводимые из первого ECU 30, и принимает значения измерения, вводимые из датчика 20 частоты вращения.
Затем второй ECU 32 работает, на основе принимаемых входных значений, в режиме движения за счет электрической мощности или рекуперативном режиме с возможностью управлять операциями включения/выключения, например, переключающих элементов с мостовым соединением инвертора 12. Он преобразует постоянное напряжение, выводимое из аккумулятора 14, в управляемые трехфазные переменные напряжения, за счет этого прикладывая управляемые трехфазные переменные напряжения к трехфазным обмоткам электромотора-генератора 10. Он управляет крутящим моментом электромотора-генератора 10 для вращения ротора 10r таким образом, что он соответствует целевому крутящему моменту Tm* MG.
[0018] В частности, в рекуперативном режиме, второй ECU 32 выполняет задачу рекуперативного управления. Задача рекуперативного управления сконфигурирована с возможностью:
(1) Вычислять запрашиваемый водителем тормозной крутящий момент для замедления транспортного средства VEH согласно рабочему ходу Brk педали тормоза.
(2) Удовлетворять вычисленному запрашиваемому водителем тормозному крутящему моменту на основе отрицательного значения выходного крутящего момента электромотора-генератора 10, управляемого таким образом, что оно соответствует отрицательному значению целевого крутящего момента Tm* MG и тормозного крутящего момента, сформированного посредством тормозной системы 50 для приложения тормозной силы к каждому колесу транспортного средства VEH, чтобы замедлять транспортное средство VEH.
Отрицательное значение выходного крутящего момента электромотора-генератора 10, который также упоминается в качестве рекуперативного крутящего момента электромотора-генератора 10, приводит к тому, что электромотор-генератор 10 выступает в качестве генератора, чтобы формировать электрическую энергию переменного тока, т.е. рекуперативную мощность, на основе кинетической энергии ведущих колес 18 транспортного средства VEH. Сформированная электрическая энергия переменного тока преобразуется в электрическую энергию постоянного тока посредством инвертора 12, и электрическая энергия постоянного тока заряжается в аккумулятор 14.
Второй ECU 32 первого варианта осуществления переключает свой рабочий режим на рекуперативный режим с режима движения за счет электрической мощности, чтобы выполнять задачу рекуперативного управления электромотора-генератора 10 при таких условиях, что:
(1) Скорость V движения транспортного средства равна или выше предварительно определенной скорости, предварительно определенной как превышающей нуль.
(2) Водитель не нажимает педаль акселератора.
(3) Водитель нажимает педаль тормоза.
Второй ECU 32 допускает определение того, не нажимает или нет водитель педаль акселератора, согласно рабочему ходу Acc педали акселератора, и определение того, нажимает или нет водитель педаль тормоза, согласно рабочему ходу Brk педали тормоза.
Второй ECU 32 работает в рекуперативном режиме при одном из следующих условий:
(1) Транспортное средство VEH замедляется в то время, когда водитель нажимает педаль тормоза.
(2) Транспортное средство VEH движется на спуске в то время, когда скорость V движения поддерживается равной предварительно определенной скорости, при нажатии педали тормоза водителем.
В рекуперативном режиме, второй ECU 32 может вычислять скорость V транспортного средства согласно частоте Nm вращения электромотора.
[0019] Далее описывается пример управления крутящим моментом электромотора-генератора 10, выполняемого посредством второго ECU 32 на основе целевого крутящего момента Tm* MG, со ссылкой на блок-схему по фиг. 2.
[0020] Как проиллюстрировано на фиг. 2, второй ECU 32 включает в себя модуль 32a вычисления, модуль 32b задания целевых коэффициентов затухания, процессор 32c фильтрации и контроллер 32c1 привода. Эти элементы 32a в 32c1 могут реализовываться во втором ECU 32 в качестве аппаратных элементов, программных элементов и/или гибридных аппаратно-программных элементов.
Модуль 32a вычисления, модуль 32b задания целевых коэффициентов затухания, процессор 32c фильтрации и контроллер 32c1 привода сконфигурированы с возможностью подавлять резонанс кинематической цепи, когда, например, целевой крутящий момент Tm* MG быстро изменяется, за счет этого подавляя вибрации транспортного средства VEH. Резонанс кинематической цепи возникает вследствие, например, резонансных частотных компонентов кинематической цепи, содержащихся в целевом крутящем моменте Tm* MG, когда, например, целевой крутящий момент Tm* MG внезапно изменяется. Например, резонанс кинематической цепи может выражаться как известная модель крутильных колебаний, более конкретно, как известная модель первой гармоники крутильных колебаний кинематической цепи.
В частности, модель крутильных колебаний кинематической цепи состоит из модели, включающей в себя момент инерции электромотора-генератора 10 и момент инерции эквивалентной массы транспортного средства VEH, сцепленных через пружину, работающую на кручение. Резонансная частота frz кинематической цепи переменно задается, например, в диапазоне от 2 до 10 Гц включительно.
[0021] Модуль 32a вычисления, который выступает в качестве, например, модуля вычисления параметров, вычисляет, согласно режиму движения транспортного средства VEH, включающему в себя рабочий ход Acc педали акселератора, рабочий ход Brk педали тормоза и/или скорость V движения, параметр Attr затухания. Параметр Attr затухания выступает в качестве параметра, ассоциированного с запрашиваемым значением для скорости отклика по фактическому выходному крутящему моменту Tm электромотора-генератора 10 относительно целевого крутящего момента Tm* MG; скорость отклика упоминается в качестве скорости отклика по крутящему моменту электромотора-генератора 10. Параметр Attr затухания также выступает в качестве параметра для определения того, как затухают вибрационные частотные компоненты.
В частности, модуль 32a вычисления вычисляет параметр Attr затухания таким образом, что параметр Attr затухания уменьшается с увеличением запрашиваемого значения для скорости отклика по крутящему моменту электромотора-генератора 10.
[0022] В частности, модуль 32a вычисления уменьшает параметр Attr затухания с увеличением изменения рабочего хода Acc педали акселератора в единицу времени. Другими словами, модуль 32a вычисления регулирует параметр Attr затухания таким образом, что значение параметра Attr затухания для первого случая меньше значения параметра Attr затухания для второго случая. Первый случай представляет случай, в котором увеличение рабочего хода Acc педали акселератора в единицу времени превышает предварительно определенное пороговое изменение, т.е. предварительно определенное пороговое увеличение, рабочего хода Acc педали акселератора в единицу времени. Второй случай представляет случай, в котором увеличение рабочего хода Acc педали акселератора в единицу времени равно или меньше предварительно определенного порогового изменения, т.е. предварительно определенного порогового увеличения, рабочего хода Acc педали акселератора в единицу времени.
Дополнительно, модуль 32a вычисления уменьшает значение параметра Attr затухания в ходе выполнения задачи рекуперативного управления таким образом, что оно меньше значения параметра Attr затухания в то время, когда задача рекуперативного управления не выполняется. Модуль 32a вычисления может определять то, выполняет или нет второй ECU 32 задачу рекуперативного управления, согласно рабочему ходу Acc педали акселератора, рабочему ходу Brk педали тормоза и скорости V движения.
В частности, модуль 32a вычисления допускает определение, согласно рабочему ходу Acc педали акселератора, рабочему ходу Brk педали тормоза и/или скорости V движения:
(1) Того, имеет или нет водитель намерение заставлять транспортное средство VEH ускоряться.
(2) Того, выполняется или нет задача рекуперативного управления.
[0023] Модуль задания целевых коэффициентов затухания, который выступает в качестве модуля 32b переменного задания, переменно задает целевой коэффициент ξtag затухания, который представляет целевое значение степени затухания вибрационных частотных компонентов, согласно параметру Attr затухания. Например, модуль 32b задания целевых коэффициентов затухания первого варианта осуществления может иметь реляционную информацию RI, такую как двумерная карта, проиллюстрированная на фиг. 2, или уравнение, в которое включены значения целевого коэффициента ξtag затухания, коррелирующиеся с соответствующими значениями параметра Attr затухания. На фиг. 2, реляционная информация RI представляет то, что целевой коэффициент ξtag затухания является линейной функцией параметра Attr затухания с положительным градиентом.
В этом случае, модуль 32b задания целевых коэффициентов затухания обращается к реляционной информации RI с использованием значения параметра Attr затухания в качестве входных данных, чтобы считывать значение целевого коэффициента ξtag затухания, соответствующее входному значению данных параметра Attr затухания. Затем модуль 32b задания целевых коэффициентов затухания выводит значение целевого коэффициента ξtag затухания в процессор 32c фильтрации.
Например, модуль 32b задания целевых коэффициентов затухания увеличивает целевой коэффициент ξtag затухания с увеличением параметра Attr затухания. В частности, модуль 32b задания целевых коэффициентов затухания первого варианта осуществления задает целевой коэффициент ξtag затухания равным предписанному коэффициенту ξp затухания, когда параметр Attr затухания становится минимальным значением Attmin, и равным 1, когда параметр Attr затухания становится максимальным значением Attmax. Следует отметить, что предписанный коэффициент ξp затухания заранее задается в качестве значения, большего нуля и меньшего 1.
[0024] Процессор фильтрации, который выступает в качестве модуля 32c обработки фильтрации, фильтрует целевой крутящий момент Tm* MG на основе фильтра, имеющего предварительно определенные передаточные характеристики I(s) фильтра, при регулировании передаточных характеристик I(s) фильтра согласно целевому коэффициенту ξtag затухания, выводимому из модуля 32b задания целевых коэффициентов затухания.
Ниже описываются передаточные характеристики I(s) фильтра согласно первому варианту осуществления.
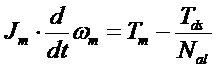
[0025] Во-первых, следует выяснить передаточные частотные характеристики модели установки транспортного средства, имеющей крутящий момент, выводимый из электромотора-генератора 10 в выходной вал 10a электромотора, в качестве ввода и выходной крутящий момент Tds ведущего вала 16 в качестве вывода. Передаточные частотные характеристики также упоминаются в качестве моделируемых передаточных характеристик Gpm(s). Первый вариант осуществления выражает уравнения движения транспортного средства посредством следующих уравнений (1)-(6):
[0026] 
[0027] 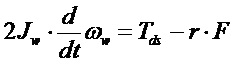
[0028] 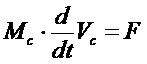
[0029] 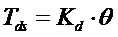
[0030] 
[0031] 
где:










F представляет мощность приведения в движение транспортного средства



[0032] Выполнение преобразования Лапласа по этим уравнениям (1)-(6) приводит к выражению моделируемых передаточных характеристик Gpm(s) посредством следующего уравнения (7):
[0033] 
(7)
где:

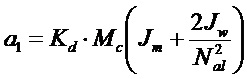
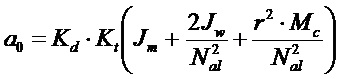
В уравнении (7), ссылочное обозначение s представляет оператор Лапласа, и ссылочное обозначение ξp элемента запаздывания второго порядка представляет предписанный коэффициент затухания, который является коэффициентом затухания для кинематической цепи. В уравнении (7), ссылочное обозначение ωp элемента запаздывания второго порядка представляет резонансную угловую частоту, т.е. естественную угловую частоту, кинематической цепи. Первый вариант осуществления, соответственно, задает резонансную угловую частоту ωp и предписанный коэффициент ξp затухания равными фиксированным значениям. Причина, по которой моделируемые передаточные характеристики Gpm(s) выражаются посредством уравнения (7), заключается в том, что фактические передаточные частотные характеристики Gpr(s) кинематической цепи, которой назначается ссылка с номером 40, аппроксимированы посредством уравнения (7).
[0034] Далее следует выражать целевые передаточные частотные характеристики целевой модели установки транспортного средства, которая имеет крутящий момент, выводимый из электромотора-генератора 10 в выходной вал 10a электромотора, в качестве ввода и выходной крутящий момент Tds ведущего вала 16 в качестве вывода, посредством следующего уравнения (8):
[0035] 
где Gr(s) представляет целевые передаточные частотные характеристики целевой модели установки транспортного средства, которые упоминаются в качестве целевых передаточных характеристик.
Замена предписанного коэффициента ξp затухания, описанного в уравнении (7), на целевой коэффициент ξtag затухания позволяет получать уравнение (8).
Из уравнений (7) и (8), следующее уравнение (9), которое выражает передаточные характеристики I(s) фильтра, извлекается следующим образом:
[0036] 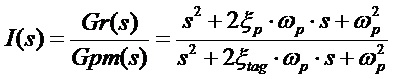
Размерность целевых передаточных характеристик Gr(s) и размерность моделируемой передаточной характеристики Gpm(s) являются идентичными друг другу, приводя к тому, что передаточные характеристики I(s) фильтра являются безразмерными характеристиками. Инверсия моделируемой передаточной характеристики Gpm(s) в передаточных характеристиках I(s) фильтра выступает в качестве обратного фильтра для подавления резонанса кинематической цепи.
[0037] Это конфигурация задает целевой коэффициент ξtag затухания равный предписанному коэффициенту ξp затухания, когда параметр Attr затухания становится минимальным значением Attmin. Это задание приводит к тому, что передаточные характеристики I(s) фильтра равны 1, приводя к выводу целевого крутящего момента Tm* MG, который вводится в процессор фильтрации 32d, из процессора 32d фильтрации неизменным.
Напротив, конфигурация задает целевой коэффициент ξtag затухания равным 1, когда параметр Attr затухания становится максимальным значением Attmax, приводя к выводу целевого крутящего момента Tm* MG, который вводится в процессор 32c фильтрации, из процессора 32c фильтрации с затуханием.
Фиг. 2 схематично иллюстрирует целевой крутящий момент Tm* MG, выводимый из процессора 32c фильтрации, в качестве фильтрованного целевого крутящего момента MG, т.е. фильтрованного целевого крутящего момента Tam* MG.
Фиг. 3A схематично иллюстрирует то, как кривые фильтрованного целевого крутящего момента Tam* MG изменяются во времени; кривые получаются, когда соответствующие значения целевого коэффициента ξtag затухания задаются равными различным значениям в диапазоне от 1 до предписанного коэффициента ξp затухания. Фиг. 3B также схематично иллюстрирует то, как кривые выходного крутящего момента Tds ведущего вала 16 изменяются во времени; кривые получаются, когда соответствующие значения целевого коэффициента ξtag затухания задаются равными различным значениям в диапазоне от 1 до предписанного коэффициента ξp затухания.
Например, каждый из фиг. 3A и 3B показывает кривую, которая получается, когда соответствующий целевой коэффициент ξtag затухания задается равным предписанному коэффициенту ξp затухания, нарисованную посредством сплошной линии. Аналогично, каждый из фиг. 3A и 3B показывает кривую, которая получается, когда целевой коэффициент ξtag затухания задается равным 1, нарисованную посредством сплошной линии.
Помимо этого, каждый из фиг. 3A и 3B показывает кривые, которые получаются, когда соответствующие три различных значения назначаются целевому коэффициенту ξtag затухания, нарисованные посредством соответствующих пунктирных линий, штрихпунктирных линий и штрихпунктирных линий с двумя точками. Пунктирные кривые, штрихпунктирные кривые и штрихпунктирные кривые с двумя точками имеют такую характеристику, что соответствующие значения целевого коэффициента ξtag затухания увеличиваются в порядке от пунктирной кривой, штрихпунктирной кривой, до штрихпунктирной кривой с двумя точками.
[0038] Фиг. 3A и 3B показывают то, что целевой крутящий момент Tm* MG резко повышается в ступенчатой функции во время t1, а после времени t1 показывают то, что чем меньше значение целевого коэффициента ξtag затухания, тем больше повышается скорость отклика при управлении крутящим моментом.
[0039] Контроллер 32c1 привода выполняет управление включением/выключением переключающих элементов с мостовым соединением инвертора 12 согласно фильтрованному целевому крутящему моменту Tam* MG, чтобы преобразовывать постоянное напряжение, выводимое из аккумулятора 14, в управляемое переменное напряжение, за счет этого прикладывая управляемое переменное напряжение к трехфазным обмоткам электромотора-генератора 10. Это приводит к тому, что выходной крутящий момент электромотора-генератора 10 соответствует целевому крутящему моменту Tam* MG. Контроллер 32c1 привода может выполнять известное управление вектором тока в качестве примера управления включением/выключением переключающих элементов инвертора 12.
Например, управление вектором тока вычисляет, из измеренных токов V- и W-фазы, ток оставшейся фазы, т.е. U-фазы и преобразует трехфазные токи (токи U-, V- и W-фазы) в значение тока на первой оси и значение тока на второй оси; первая ось и вторая ось задают вращающуюся декартову систему координат в роторе 10r. Вращающаяся декартова система координат вращается по мере того, как вращается ротор 10r. Управление вектором тока получает первое отклонение между измеренным значением тока на первой оси и задаваемым током на первой оси и второе отклонение между измеренным значением тока на второй оси и задаваемым током на второй оси. Затем управление вектором тока получает трехфазные переменные задаваемые напряжения, которые должны обнулять первое и второе отклонения. Управление вектором тока управляет операциями включения/выключения переключающих элементов инвертора 12 согласно полученным трехфазным задаваемым напряжениям, в силу этого приводя к тому, что выходной крутящий момент электромотора-генератора 10 соответствует фильтрованному целевому крутящему моменту Tam* MG.
Контроллер 32c1 привода второго ECU 32 согласно первому варианту осуществления выступает в качестве, например, контроллера. В частности, процесс фильтрации процессора 32c1 фильтрации может преобразовывать передаточные характеристики I(s) фильтра, представленные в комплексной области, т.е. в S-области, например, в дискретизированные передаточные характеристики I(z) фильтра в дискретизированной комплексной области, т.е. в Z-области. Затем процесс фильтрации процессора 32c1 фильтрации может выполнять фильтрацию целевого крутящего момента Tm* MG с использованием дискретизированных передаточных характеристик I(z) фильтра.
[0040] Как описано выше, второй ECU 32 определяет то, имеет или нет водитель намерение заставлять транспортное средство VEH быстро маневрировать, например, согласно увеличению изменения рабочего хода Acc педали акселератора в единицу времени. Затем второй ECU 32 уменьшает значение параметра Attr затухания для случая, в котором водитель имеет намерение заставлять транспортное средство VEH быстро маневрировать, таким образом, что оно меньше значения параметра Attr затухания для случая, в котором водитель не имеет намерения заставлять транспортное средство VEH быстро маневрировать.
Дополнительно, второй ECU 32 определяет то, выполняется или нет задача рекуперативного управления, например, согласно рабочему ходу Acc педали акселератора, рабочему ходу Brk педали тормоза и/или скорости V движения. Затем второй ECU 32 уменьшает значение параметра Attr затухания для случая, в котором задача рекуперативного управления выполняется, таким образом, что оно меньше значения параметра Attr затухания для случая, в котором задача рекуперативного управления не выполняется.
Уменьшение значения параметра Atp затухания уменьшает целевой коэффициент ξtag затухания, за счет этого повышая скорость отклика при управлении крутящим моментом (см. фиг. 3A и 3B).
В частности, эта конфигурация второго ECU 32 уменьшает задержку по фазе передаточных характеристик I(s) фильтра для фильтра, за счет этого уменьшая задержку реакции выходного значения из фильтра в ответ на входное значение в фильтр.
Следовательно, эта конфигурация второго ECU 32 обеспечивает как улучшение общей характеристики управляемости транспортного средства VEH водителем, так и регулирование рекуперативного крутящего момента электромотора-генератора 10 таким образом, что он непосредственно соответствует целевому крутящему моменту Tm* MG в рекуперативном режиме, при подавлении вибраций кинематической цепи транспортного средства VEH.
С другой стороны, второй ECU 32 увеличивает значение параметра Attr затухания для случая, в котором водитель имеет намерение обеспечивать движение транспортного средства VEH с более высокой степенью комфорта, таким образом, что оно превышает значение параметра Attr затухания для случая, в котором водитель имеет намерение заставлять транспортное средство VEH быстро маневрировать.
Увеличение значения параметра Attr затухания увеличивает целевой коэффициент ξtag затухания, за счет этого увеличивая степень затухания целевого крутящего момента Tm* MG (фиг. 3A и 3B).
В частности, эта конфигурация второго ECU 32 обеспечивает повышение комфортности водителя транспортного средства VEH при одновременном улучшении преимуществ подавления вибраций кинематической цепи транспортного средства VEH.
[0041] Второй вариант осуществления
Далее описывается второй вариант осуществления настоящего изобретения со ссылкой на фиг. 4 при сосредоточении на отличающихся аспектах между вторым вариантом осуществления и первым вариантом осуществления.
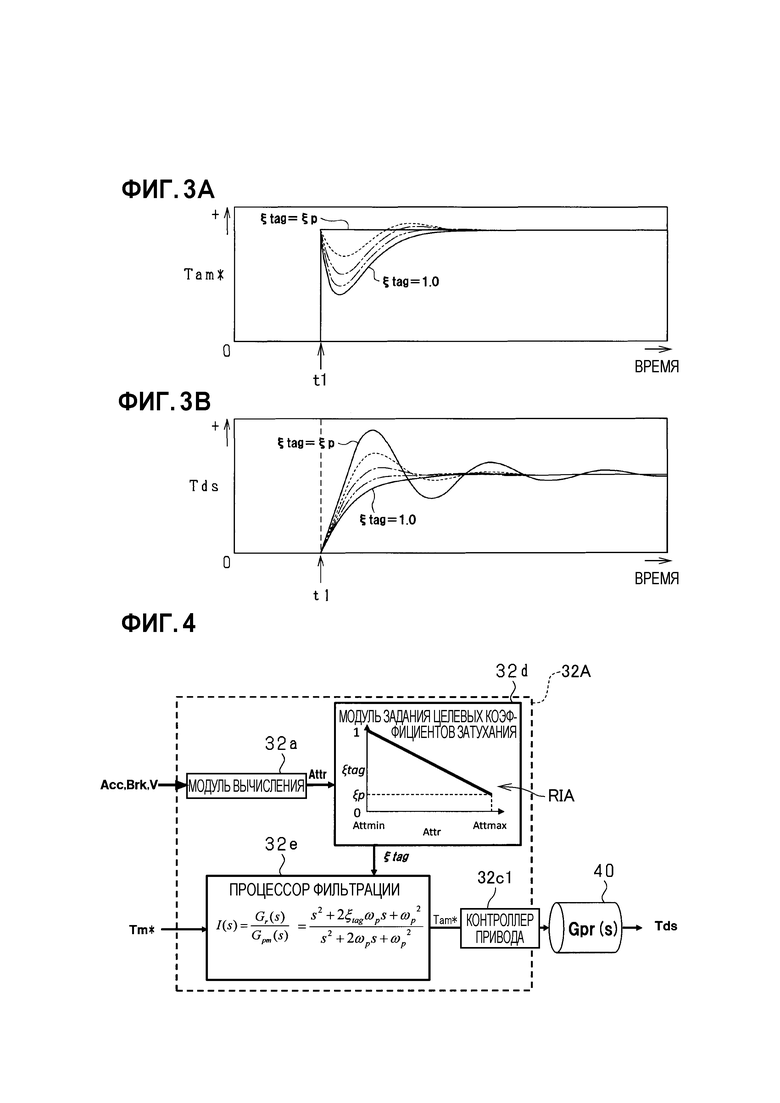
Ссылаясь на фиг. 4, второй ECU 32A второго варианта осуществления включает в себя модуль 32d задания целевых коэффициентов затухания и процессор 32e фильтрации, которые отличаются от модуля 32b задания целевых коэффициентов затухания и процессора 32c фильтрации, в дополнение к компонентам 32a и 32c1.
[0042] Например, модуль 32d задания целевых коэффициентов затухания второго варианта осуществления может иметь реляционную информацию RIA, такую как двумерная карта, проиллюстрированная на фиг. 4, или уравнение, в которое включены значения целевого коэффициента ξtag затухания, коррелирующиеся с соответствующими значениями параметра Attr затухания. На фиг. 4, реляционная информация RIA представляет то, что целевой коэффициент ξtag затухания является линейной функцией параметра Attr затухания с отрицательным градиентом.
В этом случае, модуль 32d задания целевых коэффициентов затухания обращается к реляционной информации RIA с использованием значения параметра Attr затухания в качестве входных данных, чтобы считывать значение целевого коэффициента ξtag затухания, соответствующее входному значению данных параметра Attr затухания. Затем модуль 32d задания целевых коэффициентов затухания выводит значение целевого коэффициента ξtag затухания в процессор 32e фильтрации.
В частности, модуль 32d задания целевых коэффициентов затухания согласно второму варианту осуществления уменьшает целевой коэффициент ξtag затухания с увеличением параметра Attr затухания. В частности, модуль 32d задания целевых коэффициентов затухания согласно второму варианту осуществления задает целевой коэффициент ξtag затухания равным 1, когда параметр Attr затухания становится минимальным значением Attmin, и равным предписанному коэффициенту ξp затухания, когда параметр Attr затухания становится максимальным значением Attmax.
[0043] Процессор 32e фильтрации фильтрует целевой крутящий момент Trq* MG на основе предварительно определенных передаточных характеристик I(s) фильтра при регулировании передаточных характеристик I(s) фильтра согласно целевому коэффициенту ξtag затухания, выводимому из модуля 32d задания целевых коэффициентов затухания. Второй вариант осуществления выражает моделируемые передаточные характеристики Gpm(s) посредством следующего уравнения (10):
[0044] 
Замена предписанного коэффициента ξp затухания в уравнении (7) на целевой коэффициент ξtag затухания устанавливает уравнение (10).
Второй вариант осуществления также выражает целевые передаточные характеристики Gr(s) посредством следующего уравнения (11):
[0045] 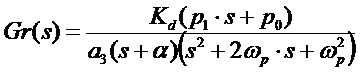
Замена целевого коэффициента ξtag затухания в уравнении (8) на 1 устанавливает уравнение (11).
Из уравнений (10) и (11), следующее уравнение (12), которое выражает передаточные характеристики I(s) фильтра, извлекается следующим образом:
[0045] 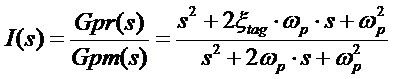
[0046] Эта конфигурация второго ECU 32A второго варианта осуществления задает целевой коэффициент ξtag затухания равным 1, когда параметр Attr затухания становится минимальным значением Attmin, приводя к тому, что передаточные характеристики I(s) фильтра равны 1. Это приводит к выводу целевого крутящего момента Tm* MG, который вводится в процессор 32e фильтрации, из процессора 32e фильтрации как есть.
С другой стороны, эта конфигурация второго ECU 32A задает целевой коэффициент ξtag затухания равным предписанному коэффициенту ξp затухания, когда параметр Attr затухания становится максимальным значением Attmax. Это приводит к выводу целевого крутящего момента Tm* MG, который вводится в процессор 32e фильтрации, из процессора 32e фильтрации с затуханием.
Таким образом, управление параметром Attr затухания на основе конфигурации второго варианта осуществления обеспечивает регулирование степени затухания посредством передаточных характеристик I(s) фильтра, т.е. уровня скорости отклика по крутящему моменту. В силу этого оно позволяет достигать преимуществ, идентичных преимуществам, достигаемым посредством первого варианта осуществления.
[0047] Третий вариант осуществления
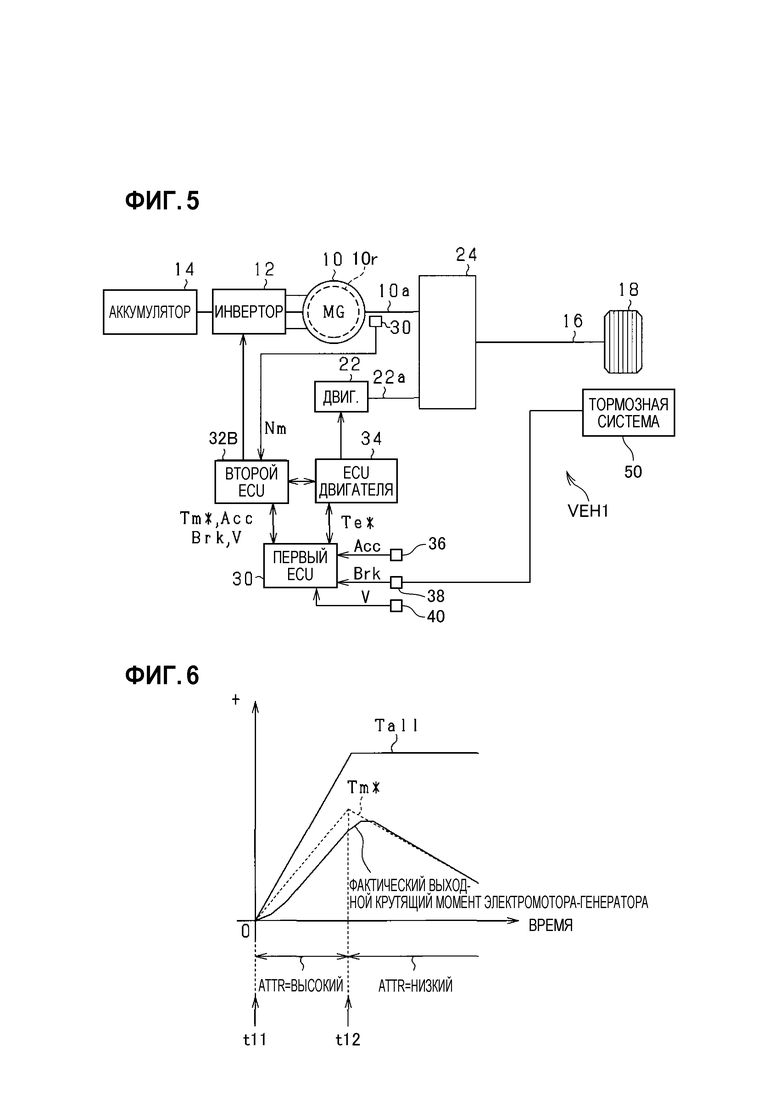
Далее описывается третий вариант осуществления настоящего изобретения со ссылкой на фиг. 5 при сосредоточении на отличающихся аспектах между третьим вариантом осуществления и первым вариантом осуществления.
Ссылаясь на фиг. 5, транспортное средство VEH1 дополнительно включает в себя известный двигатель внутреннего сгорания, называемый двигателем 22, в качестве главного двигателя транспортного средства VEH1 в дополнение к электромотору-генератору 10.
[0048] Транспортное средство VEH1 также включает в себя делитель 24 мощности и третий ECU 34.
[0049] Двигатель 22 имеет коленчатый вал 22a, соединенный с делителем 24 мощности. Выходной вал 10a электромотора также соединяется с выходным валом 10a электромотора.
Делитель 24 мощности также соединяется с ведущим валом 16. Например, делитель 24 мощности сконфигурирован с возможностью передавать мощность, предоставляемую, по меньшей мере, из одного из двигателя 22 и электромотора-генератора 10, на ведущий вал 16 и разделять мощность, предоставляемую из двигателя 22, таким образом, чтобы передавать первую разделенную мощность на ведущий вал 16 и вторую разделенную мощность в электромотор-генератор 10. Например, делитель 24 мощности также сконфигурирован с возможностью свободно интегрировать мощность, предоставляемую из электромотора-генератора 10, и мощность, предоставляемую из двигателя 22, и передавать интегрированную мощность на ведущий вал 16. Кинематическая цепь третьего варианта осуществления включает в себя, например, выходной вал 10a электромотора, коленчатый вал 22a, делитель 24 мощности и ведущий вал 16.
[0050] Третий ECU 34 сконструирован в качестве, например, микрокомпьютерной схемы, включающей в себя, по существу, например, CPU, ROM, RAM и модули ввода-вывода. Третий ECU 34, т.е. соответствующий CPU, выполняет различные программы, сохраненные, например, в ROM. Первый ECU 30, второй ECU 32C и третий ECU 34 сконфигурированы с возможностью обмениваться информацией друг с другом.
[0051] Первый ECU 30 находится выше в иерархии каждого из второго и третьего ECU 32B и 34.
В частности, первый ECU 30 вычисляет запрашиваемый крутящий момент Tall транспортного средства VEH1, например, согласно рабочему ходу Acc педали акселератора. Затем первый ECU 30 разделяет запрашиваемый крутящий момент Tall на целевой крутящий момент Tm* MG и целевой крутящий момент двигателя 22, который упоминается в качестве целевого крутящего момента Te* двигателя. Затем первый ECU 30 выводит целевой крутящий момент Tm* MG, выделяемый для электромотора-генератора 10, во второй ECU 32B и целевой крутящий момент Te* двигателя, выделяемый для двигателя 22, в третий ECU 34. Следует отметить, что третий вариант осуществления, например, допускает то, что целевой крутящий момент Te* двигателя задается равным или превышающим нуль.
[0052] Третий ECU 34 выступает в качестве модуля управления для управления двигателем 22. Третий ECU 34 принимает, по меньшей мере, целевой крутящий момент Te* двигателя, вводимый из первого ECU 30. Третий ECU 34 управляет, на основе принимаемого целевого крутящего момента Te* двигателя, надлежащим объемом топлива, которое должно впрыскиваться из инжектора, предоставленного для каждого цилиндра двигателя 22, в камеру сгорания соответствующего цилиндра, и надлежащим распределением зажигания для воспламенителя, предоставленного для каждого цилиндра двигателя 22. Это управление двигателем 22 управляет фактическим крутящим моментом, сформированным из двигателя 22, таким образом, что он соответствует целевому крутящему моменту Te* двигателя.
[0053] Модуль 32a вычисления второго ECU 32B согласно третьему варианту осуществления регулирует параметр Attr затухания таким образом, что значение параметра Attr затухания для первой ситуации превышает значение параметра Attr затухания для второй ситуации. Первая ситуация представляет ситуацию, когда каждый из целевого крутящего момента Tm* MG и целевого крутящего момента Te* двигателя превышает нуль, и запрашиваемый крутящий момент Tall транспортного средства VEH1 кратковременно увеличивается (см. период от времени t11 до времени t12 по фиг. 6). Вторая ситуация представляет ситуацию, когда запрашиваемый крутящий момент Tall транспортного средства VEH1 находится в установившемся состоянии (см. период после времени t12 по фиг. 6). Ситуация, когда каждый из целевого крутящего момента Tm* MG и целевого крутящего момента Te* двигателя превышает нуль, показывает то, что выходная мощность из каждого из электромотора-генератора 10 и двигателя 22 передается на ведущие колеса 18.
Скорость отклика по крутящему моменту электромотора-генератора 10 выше скорости отклика по крутящему моменту двигателя 22. Это вызывает то, что выходной крутящий момент электромотора-генератора 10 имеет доминирующее влияние на интегрированный выходной крутящий момент электромотора-генератора 10 и двигателя 22 в то время, когда запрашиваемый крутящий момент Tall транспортного средства VEH1 изменяется, т.е. увеличивается (ускорение). Таким образом, второй ECU 32B увеличивает значение параметра Attr затухания в то время, когда запрашиваемый крутящий момент Tall транспортного средства VEH1 изменяется, по сравнению со значением параметра Attr затухания в то время, когда запрашиваемый крутящий момент Tall транспортного средства VEH1 находится в установившемся состоянии. Он выполняет подавление вибраций транспортного средства VEH посредством процессора 32c фильтрации до улучшения общей характеристики управляемости транспортного средства VEH1 водителем.
Напротив, второй ECU 32B уменьшает значение параметра Attr затухания в то время, когда запрашиваемый крутящий момент Tall транспортного средства VEH1 находится в установившемся состоянии, по сравнению со значением параметра Attr затухания в то время, когда запрашиваемый крутящий момент Tall транспортного средства VEH1 изменяется. Он выполняет регулирование фактического выходного крутящего момента Tm электромотора-генератора 10 таким образом, что он соответствует целевому крутящему моменту Tm* MG с более высокой скоростью отклика до подавления вибраций транспортного средства VEH1. Таким образом, это приводит к регулированию интегрированного крутящего момента электромотора-генератора 10 и двигателя 22 таким образом, что он непосредственно соответствует запрашиваемому крутящему моменту Tall транспортного средства VEH1, за счет этого немедленно удовлетворяя запрос на ускорение водителя. Таким образом, это улучшает общую характеристику управляемости транспортного средства VEH1 водителем.
[0054] Модификации
Каждый вариант осуществления может модифицироваться следующим образом.
[0055] Моделируемые передаточные характеристики Gpm(s) и целевые передаточные характеристики Gr(s) не ограничены характеристиками, описанными в каждом варианте осуществления. В частности, каждая из моделируемых передаточных характеристик Gpm(s) и целевых передаточных характеристик Gr(s) может иметь такую конфигурацию, в которой:
(1) Степень оператора Лапласа, включенного в знаменатель уравнения передаточных характеристик I(s) фильтра согласно каждому варианту осуществления, задается равной 3 или более.
(2) Степень оператора Лапласа, включенного в числитель уравнения передаточных характеристик I(s) фильтра согласно каждому варианту осуществления, задается равной 3 или более.
[0056] Модуль 32b задания целевых коэффициентов затухания первого варианта осуществления может задавать целевой коэффициент ξtag затухания, когда ограниченный параметр Attr затухания становится максимальным значением, равным значению, превышающему 1. Модуль 32d задания целевых коэффициентов затухания второго варианта осуществления может задавать целевой коэффициент ξtag затухания, когда ограниченный параметр Attr затухания становится минимальным значением, равным значению, превышающему 1.
[0057] Модуль 32a вычисления третьего варианта осуществления может регулировать параметр Attr затухания таким образом, что значение параметра Attr затухания для первой ситуации меньше значения параметра Attr затухания для третьей ситуации. Первая ситуация представляет ситуацию, когда каждый из целевого крутящего момента Tm* MG и целевого крутящего момента Te* двигателя превышает нуль, и запрашиваемый крутящий момент Tall транспортного средства VEH1 увеличивается. Третья ситуация представляет ситуацию, когда запрашиваемый крутящий момент Tall транспортного средства VEH1 уменьшается.
[0058] Модуль 32b задания целевых коэффициентов затухания первого варианта осуществления непрерывно увеличивает целевой коэффициент ξtag затухания с увеличением ограниченного параметра Attr затухания, но настоящее изобретение не ограничено этим. В частности, модуль 32b задания целевых коэффициентов затухания может увеличивать целевой коэффициент ξtag затухания на нескольких стадиях, к примеру, на трех стадиях, с увеличением параметра Attr затухания. Аналогично, модуль 32d задания целевых коэффициентов затухания второго варианта осуществления может уменьшать целевой коэффициент ξtag затухания на нескольких стадиях, к примеру, на трех стадиях, с увеличением параметра Attr затухания.
[0059] Процессор 32c фильтрации, который выполняет процесс фильтрации целевого крутящего момента Tm* MG, может устанавливаться в первом ECU 30.
[0060] Модель установки транспортного средства для моделируемых передаточных характеристик Gpm(s) и целевых передаточных характеристик Gr(s) имеет выходной крутящий момент Tds ведущего вала 16 в качестве вывода, но настоящее изобретение не ограничено этим. В частности, модель установки транспортного средства, имеющая частоту вращения или угол θ скручивания ведущего вала 16 в качестве вывода, может использоваться в качестве модели установки транспортного средства для моделируемых передаточных характеристик Gpm(s) и целевых передаточных характеристик Gr(s).
Список номеров ссылок
[0061] 10 - электромотор-генератор
16 - ведущий вал
18 - ведущее колесо
32 - второй ECU

Изобретение относится к устройствам для управления тяговой системой транспортных средств с электротягой. Устройство управления для вращающейся электрической машины транспортного средства содержит процессор фильтрации, контроллер, модуль вычисления параметров, модуль переменного задания. Процессор фильтрации фильтрует целевой крутящий момент электрической машины с тем, чтобы подавлять вибрационный частотный компонент кинематической цепи с использованием фильтра, имеющего передаточную частотную характеристику. Контроллер выполняет управление электрической машины согласно фильтрованному целевому крутящему моменту. Модуль вычисления параметров вычисляет, согласно состоянию движения транспортного средства, параметр, ассоциированный с запрашиваемым значением для скорости отклика по выходному крутящему моменту вращающейся электрической машины относительно целевого крутящего момента. Модуль переменного задания переменно задает передаточную частотную характеристику фильтра таким образом, чтобы уменьшать степень затухания вибрационного частотного компонента с увеличением запрашиваемого значения для скорости отклика по выходному крутящему моменту. Технический результат заключается в снижении вибрационного частотного компонента при высокой скорости отклика при управлении крутящим моментом электромотора. 6 з.п. ф-лы, 7 ил.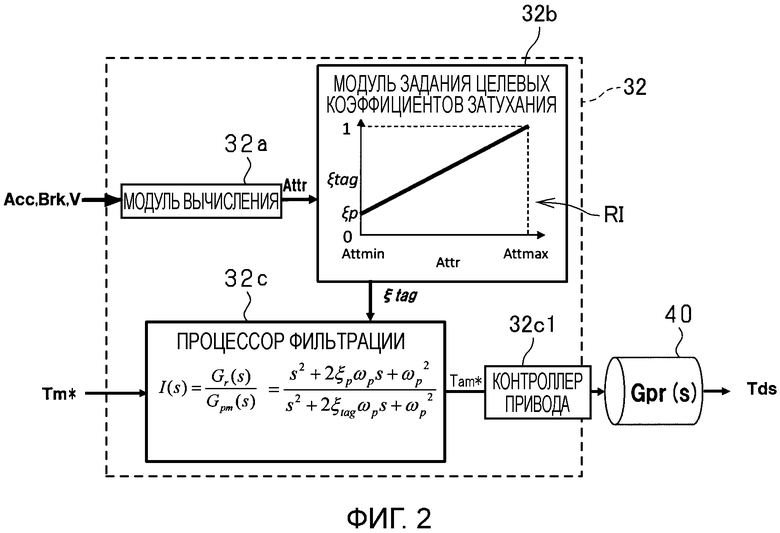
1. Устройство управления для вращающейся электрической машины (10) транспортного средства, причем транспортное средство оснащено кинематической цепью для передачи мощности, выводимой из вращающейся электрической машины, на ведущее колесо (18), причем устройство управления содержит:
- процессор (32c, 32e) фильтрации, который фильтрует целевой крутящий момент для вращающейся электрической машины с тем, чтобы подавлять вибрационный частотный компонент кинематической цепи, с использованием фильтра, имеющего передаточную частотную характеристику;
- контроллер (32c1), который выполняет управление приведением в действие вращающейся электрической машины согласно фильтрованному целевому крутящему моменту;
- модуль (32a) вычисления параметров, который вычисляет, согласно состоянию движения транспортного средства, параметр, ассоциированный с запрашиваемым значением для скорости отклика по выходному крутящему моменту вращающейся электрической машины относительно целевого крутящего момента; и
- модуль (32b, 32d) переменного задания, который переменно задает передаточную частотную характеристику фильтра таким образом, чтобы уменьшать степень затухания вибрационного частотного компонента с увеличением запрашиваемого значения для скорости отклика по выходному крутящему моменту.
2. Устройство управления по п. 1, в котором:
- кинематическая цепь включает в себя ведущий вал (16), соединенный между вращающейся электрической машиной и ведущим колесом;
- процессор фильтрации сконфигурирован с возможностью применять, к целевому крутящему моменту, процесс фильтрации на основе фильтра, имеющего передаточную частотную характеристику;
- передаточная частотная характеристика представляется как дробное выражение целевой передаточной характеристики по сравнению с моделируемой передаточной характеристикой;
- моделируемая передаточная характеристика содержит передаточную частотную характеристику модели установки транспортного средства;
- модель установки имеет выходной крутящий момент вращающейся электрической машины в качестве ввода и имеет, в качестве вывода, выходной параметр, указывающий любое из выходного крутящего момента на ведущее колесо, частоты вращения ведущего вала и угла скручивания ведущего вала;
- целевая передаточная характеристика содержит целевую передаточную частотную характеристику модели установки; и
- каждая из моделируемой передаточной характеристики и целевой передаточной характеристики включает в себя элемент запаздывания N-го порядка, где N является целым числом, равным или превышающим 2.
3. Устройство управления по п. 2, в котором:
- элемент запаздывания N-го порядка, включенный в целевую передаточную характеристику, имеет член, включающий в себя коэффициент затухания; и
- модуль (32b) переменного задания сконфигурирован с возможностью переменно задавать коэффициент затухания таким образом, чтобы увеличивать коэффициент затухания с увеличением запрашиваемого значения для скорости отклика по выходному крутящему моменту.
4. Устройство управления по п. 3, в котором:
- модуль переменного задания сконфигурирован с возможностью:
- задавать коэффициент затухания равным первому значению, которое приводит к тому, что передаточная частотная характеристика равна 1, когда запрашиваемое значение для скорости отклика по выходному крутящему моменту становится минимальным; и
- задавать коэффициент затухания равным второму значению, равному или превышающему 1, когда запрашиваемое значение для скорости отклика по выходному крутящему моменту становится максимальным.
5. Устройство управления по п. 2, в котором:
- элемент запаздывания N-го порядка, включенный в моделируемую передаточную характеристику, имеет член, включающий в себя коэффициент затухания; и
- модуль (32d) переменного задания сконфигурирован с возможностью переменно задавать коэффициент затухания таким образом, чтобы уменьшать коэффициент затухания с увеличением запрашиваемого значения.
6. Устройство управления по п. 5, в котором:
- модуль переменного задания сконфигурирован с возможностью:
- задавать коэффициент затухания равным первому значению, равному или превышающему 1, когда запрашиваемое значение для скорости отклика по выходному крутящему моменту становится минимальным; и
- задавать коэффициент затухания равным второму значению, которое приводит к тому, что передаточная частотная характеристика равна 1, когда запрашиваемое значение для скорости отклика по выходному крутящему моменту становится максимальным.
7. Устройство управления по любому из пп. 1-6, в котором:
- кинематическая цепь (10a, 16, 22a, 24) сконфигурирована с возможностью передавать выходную мощность из вращающейся электрической машины и выходную мощность из двигателя внутреннего сгорания, установленных в транспортном средстве, на ведущее колесо; и
- модуль переменного задания сконфигурирован с возможностью переменно задавать передаточную частотную характеристику фильтра таким образом, что степень затухания вибрационного частотного компонента для первой ситуации превышает степень затухания вибрационного частотного компонента для второй ситуации,
- причем первая ситуация представляет собой ситуацию, когда выходная мощность из вращающейся электрической машины и выходная мощность из двигателя передаются на ведущее колесо, и сумма целевого крутящего момента для вращающейся электрической машины и второго целевого крутящего момента для двигателя внутреннего сгорания увеличивается,
- причем вторая ситуация представляет собой ситуацию, когда сумма целевого крутящего момента для вращающейся электрической машины и второго целевого крутящего момента для двигателя внутреннего сгорания находится в установившемся состоянии.
| JP 2009284761 A, 03.12.2009 | |||
| JP 2010273508 A, 02.12.2010 | |||
| US 2013113409 A1, 09.05.2013 | |||
| US 2012330485 A1, 27.12.2012 | |||
| СПОСОБ УПРАВЛЕНИЯ МНОГОПРИВОДНОЙ ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2009 |
|
RU2426660C2 |

