Уровень техники
Область техники, к которой относится изобретение
[0001] Настоящее раскрытие сущности относится к тормозной системе, выполненной с возможностью тормозить транспортное средство.
Описание предшествующего уровня техники
[0002] Многие обычные тормозные системы транспортного средства представляют собой гидравлическое тормозное устройство, как раскрыто, например, в JP-A-2004-338582. Некоторые тормозные системы транспортного средства представляют собой электрического тормозного устройства, как раскрыто, например, в JP-A-2001-263395.
Сущность изобретения
[0003] Гидравлическое тормозное устройство имеет преимущество высокой надежности, а электрическое тормозное устройство имеет преимущество хорошей реакции. Тем не менее, эти тормозные устройства имеют соответствующие недостатки. Аспект раскрытия сущности предусматривает тормозную систему транспортного средства, имеющую высокую полезность.
[0004] В одном аспекте раскрытия сущности, тормозная система транспортного средства включает в себя: рабочий тормозной элемент, который должен управляться водителем транспортного средства; гидравлическое тормозное устройство, предусмотренное для одного из переднего колеса и заднего колеса и выполненное с возможностью формировать гидравлическую тормозную силу в соответствии с операцией рабочего тормозного элемента, причем гидравлическая тормозная сила зависит от давления рабочей жидкости; и электрическое тормозное устройство, предусмотренное для другого из переднего колеса и заднего колеса и выполненное с возможностью формировать электрическую тормозную силу в соответствии с операцией рабочего тормозного элемента, причем электрическая тормозная сила зависит от движения электромотора.
[0005] Согласно тормозной системе транспортного средства с конструкцией, как описано выше, гидравлическое тормозное устройство и электрическое тормозное устройство предусматриваются для одного и другого из переднего колеса и заднего колеса. Следовательно, можно осуществлять практически применимую тормозную систему, которая использует преимущества соответствующих тормозных устройств.
Различные формы
[0006] Ниже примерно проиллюстрированы и поясняются различные формы тормозной системы транспортного средства, которые могут заявляться в качестве предмета формулы изобретения. Каждая из форм нумеруется как пункт прилагаемой формулы изобретения и зависит от другой формы или форм при необходимости. Это служит для упрощения понимания заявленной в качестве предмета формулы изобретения тормозной системы транспортного средства, и следует понимать, что комбинации составляющих элементов, которые составляют тормозную систему транспортного средства, не ограничены формами, описанными ниже. Таким образом, следует понимать, что заявленная в качестве предмета формулы изобретения тормозная система транспортного средства должна истолковываться в свете нижеприведенного описания различных форм и вариантов осуществления. Дополнительно следует понимать, что при условии, что заявленная в качестве предмета формулы изобретения тормозная система транспортного средства истолковывается таким образом, любая форма, в которой один или более составляющих элементов добавляются или удаляются в/из любой из следующих форм, может рассматриваться как одна форма заявленной в качестве предмета формулы изобретения тормозной системы транспортного средства.
[0007] a. Базовые формы
(1) Тормозная система транспортного средства, содержащая:
- рабочий тормозной элемент, который должен управляться водителем транспортного средства;
- гидравлическое тормозное устройство, предусмотренное для одного из переднего колеса и заднего колеса и выполненное с возможностью формировать гидравлическую тормозную силу в соответствии с операцией рабочего тормозного элемента, причем гидравлическая тормозная сила зависит от давления рабочей жидкости; и
- электрическое тормозное устройство, предусмотренное для другого из переднего колеса и заднего колеса и выполненное с возможностью формировать электрическую тормозную силу в соответствии с операцией рабочего тормозного элемента, причем электрическая тормозная сила зависит от движения электромотора.
[0008] Эта форма является базовой формой заявленной в качестве предмета формулы изобретения тормозной системы транспортного средства. Согласно этой форме, тормозные устройства взаимно различных типов предусматриваются для одного и другого из переднего колеса и заднего колеса. Ввиду этого можно конструировать тормозную систему, которая использует преимущества соответствующих двух тормозных устройств, т.е. гидравлического тормозного устройства и электрического тормозного устройства. В частности, гидравлическое тормозное устройство имеет преимущество высокой надежности, а электрическое тормозное устройство имеет преимущество хорошей реакции. Таким образом, тормозная система транспортного средства согласно этой форме использует преимущества соответствующих устройств. Дополнительно, не требуется предусматривать гидравлическое тормозное устройство для обоих из переднего колеса и заднего колеса, так что гидравлическое тормозное устройство имеет компактный размер, и сама тормозная система транспортного средства, соответственно, является компактной.
[0009] Предпочтительные конкретные конструкции гидравлического тормозного устройства поясняются в следующих формах. Электрическое тормозное устройство может иметь любую конструкцию при условии, что электрическое тормозное устройство выполнено с возможностью прикладывать, через механизм преобразования движения, силу, сформированную посредством электромотора, в качестве силы для прекращения или замедления вращения колеса при управлении силой.
[0010] Не обязательно требуется, чтобы оба из гидравлического тормозного устройства и электрического тормозного устройства были выполнены с возможностью управлять соответствующими тормозными силами, которые должны формироваться. В гидравлическом тормозном устройстве, включающем в себя главный цилиндр, оснащенный усилителем за счет отрицательного давления, например, можно получать, без электронного управления, тормозную силу в соответствии с рабочей силой, прикладываемой к рабочему тормозному элементу. В случае, в котором такое гидравлическое тормозное устройство используется, главным образом управляется тормозная сила, сформированная посредством электрического тормозного устройства. Эта форма ввиду этого может быть модифицирована.
[0011] В этой форме, гидравлическое тормозное устройство может предусматриваться для переднего колеса, в то время как электрическое тормозное устройство может предусматриваться для заднего колеса, или гидравлическое тормозное устройство может предусматриваться для заднего колеса, в то время как электрическое тормозное устройство может предусматриваться для переднего колеса. В обычных транспортных средствах, тормозная сила, предоставляемая переднему колесу, задана выше тормозной силы, предоставляемой заднему колесу. С учетом этого, первая является предпочтительной, а именно, она является предпочтительной для того, чтобы предусматривать, для переднего колеса, гидравлическое тормозное устройство с высокой надежностью. Как пояснено ниже, в случае, в котором тормозная система транспортного средства включает в себя рекуперативное тормозное устройство, определение в отношении того, для какого из переднего колеса и заднего колеса предусматривается каждое из гидравлического тормозного устройства и электрического тормозного устройства, может выполняться в зависимости от того, для какого из переднего колеса и заднего колеса предусматривается рекуперативное тормозное устройство.
[0012] b. Совместное управление гидравлической тормозной силой и электрической тормозной силой
Следующие формы относятся к совместному управлению гидравлической тормозной силой и электрической тормозной силой.
[0013] (11) Тормозная система транспортного средства согласно форме (1), в которой гидравлическая тормозная сила и электрическая тормозная сила управляются таким образом, что они взаимодействуют между собой.
[0014] Посредством взаимодействия гидравлической тормозной силы и электрической тормозной силы, можно конструировать более практически применимую тормозную систему транспортного средства согласно этой форме. Взаимодействие гидравлической тормозной силы и электрической тормозной силы не ограничено конкретной конфигурацией при условии, что каждая из гидравлической тормозной силы и электрической тормозной силы выступает в качестве одного компонента тормозной силы, чтобы тормозить транспортное средство (в дальнейшем называемой "тормозной силой транспортного средства" при необходимости) в состоянии, в котором относительное регулирование гидравлической тормозной силы и электрической тормозной силы поддерживается. Например, одна конфигурация взаимодействия гидравлической тормозной силы и электрической тормозной силы может включать в себя конфигурацию, в которой, по меньшей мере, одна из гидравлической тормозной силы и электрической тормозной силы управляется таким образом, что распределение тормозной силы на переднее колесо и заднее колесо становится равным заданному распределению, независимо от того, должна или нет формироваться рекуперативная тормозная сила (которая поясняется ниже). Конкретные конфигурации взаимодействия подробнее поясняются в следующих формах.
[0015] (12) Тормозная система транспортного средства согласно форме (11), в которой гидравлическая тормозная сила и электрическая тормозная сила формируются при заданном коэффициенте распределения.
[0016] В этой форме, конфигурация взаимодействия гидравлической тормозной силы и электрической тормозной силы ограничена. В этой форме, две тормозных силы управляются согласно простому правилу управления, за счет чего можно легко управлять необходимой тормозной силой, требуемой для транспортного средства в целом. Эта форма является эффективной, когда недостаточная тормозная сила (которая поясняется ниже) покрывается посредством гидравлической тормозной силы и электрической тормозной силы. В этом случае, гидравлическая тормозная сила и электрическая тормозная сила для покрывания недостаточной тормозной силы могут легко формироваться с соответствующими подходящими абсолютными величинами. Коэффициент распределения может быть фиксированным или может быть переменным в зависимости от некоторого фактора.
[0017] (13) Тормозная система транспортного средства согласно форме (11) или (12), дополнительно содержащая рекуперативное тормозное устройство, предусмотренное для одного из переднего колеса и заднего колеса, для которого предусматривается одно из гидравлического тормозного устройства и электрического тормозного устройства, причем рекуперативное тормозное устройство выполнено с возможностью формировать рекуперативную тормозную силу с использованием выработки электрической мощности посредством вращения одного из переднего колеса и заднего колеса,
- при этом гидравлическая тормозная сила, электрическая тормозная сила и рекуперативная тормозная сила управляются таким образом, что они взаимодействуют между собой.
[0018] В этой форме, три тормозных силы взаимодействуют между собой, с тем чтобы формировать тормозную силу, требуемую для транспортного средства в целом. Эта форма обеспечивает конструкцию тормозной системы, которая использует преимущества рекуперативного тормозного устройства, в дополнение к преимуществам гидравлического тормозного устройства и электрического тормозного устройства.
[0019] Тормозная система транспортного средства этой формы включает в себя рекуперативное тормозное устройство, в дополнение к гидравлическому тормозному устройству и электрическому тормозному устройству. Рекуперативное тормозное устройство устанавливается на транспортных средствах, приводимых в действие посредством мощности мотора, к примеру, на электротранспортных средствах и гибридных транспортных средствах. Рекуперативное тормозное устройство разрешает мотору выступать в качестве электрогенератора, с тем чтобы восстанавливать часть кинетической энергии транспортного средства в качестве электрической мощности. Таким образом, рекуперативное тормозное устройство формирует тормозную силу, чтобы тормозить транспортное средство. Абсолютная величина тормозной силы, сформированной посредством рекуперативного тормозного устройства, т.е. рекуперативной тормозной силы, варьируется в зависимости от различных факторов, таких как скорость движения транспортного средства и величина заряда аккумулятора, в котором восстанавливается электрическая мощность. Тормозная система транспортного средства этой формы является преимущественной в том, что варьирование рекуперативной тормозной силы разрешается посредством управления электрической тормозной силой, которая обеспечивает хорошую реакцию. Три тормозные силы совместно управляются, так что необходимая тормозная сила предоставляется транспортному средству в целом. Следовательно, тормозная система транспортного средства этой формы обеспечивает высокую полезность, в частности, при использовании для электротранспортных средств и гибридных транспортных средств.
[0020] (14) Тормозная система транспортного средства согласно форме (13), в которой гидравлическая тормозная сила и электрическая тормозная сила управляются таким образом, что гидравлическая тормозная сила и электрическая тормозная сила покрывают недостаточную тормозную силу, которая не может покрываться посредством рекуперативной тормозной силы, причем недостаточная тормозная сила является нехваткой в требуемой полной тормозной силе, которая является тормозной силой, требуемой для транспортного средства в целом.
[0021] Эта форма является одним примером взаимодействия трех тормозных сил. Согласно этой форме, предпочтительно формируется рекуперативная тормозная сила, и гидравлическая тормозная сила и электрическая тормозная сила формируются с тем, чтобы покрывать нехватку в требуемой полной тормозной силе, которая не может покрываться посредством рекуперативной тормозной силы. Другими словами, эта форма включает в себя ограничение в отношении взаимодействия трех тормозных сил, а именно, ограничения в отношении взаимодействия гидравлической тормозной силы, электрической тормозной силы и рекуперативной тормозной силы. Согласно этой форме, необходимая требуемая полная тормозная сила может быть легко получена вследствие совместного управления тремя тормозными силами даже в ситуации, в которой, например, варьируется рекуперативная тормозная сила.
[0022] c. Преодоление варьирования тормозной силы
Следующие формы предназначены для разрешения варьирования тормозной силы, а именно, варьирования одной из гидравлической тормозной силы и электрической тормозной силы.
[0023] (21) Тормозная система транспортного средства согласно любой из форм (1)-(14), в которой в случае, в котором одна из гидравлической тормозной силы и электрической тормозной силы варьируется, другая из гидравлической тормозной силы и электрической тормозной силы изменяется таким образом, что она соответствует варьированию.
[0024] В этой форме, конфигурация взаимодействия гидравлической тормозной силы и электрической тормозной силы ограничена. Согласно этой форме, когда одна из гидравлической тормозной силы и электрической тормозной силы варьируется или колеблется, другая из гидравлической тормозной силы и электрической тормозной силы изменяется в соответствии с варьированием или флуктуацией, за счет чего получается необходимая тормозная сила транспортного средства. В частности, можно надлежащим образом преодолевать варьирование одной из гидравлической тормозной силы и электрической тормозной силы не посредством изменения тормозной силы, сформированной посредством одного из гидравлического тормозного устройства и электрического тормозного устройства, которое формирует тормозную силу, подверженную варьированию, а посредством изменения тормозной силы, сформированной посредством другого из гидравлического тормозного устройства и электрического тормозного устройства (например, тормозного устройства, которое формирует тормозную силу, не подверженную варьированию). "Ситуация, в которой одна из гидравлической тормозной силы и электрической тормозной силы варьируется", означает ситуацию, в которой гидравлическая тормозная сила или электрическая тормозная сила, которая фактически формируется, больше или меньше, вследствие некоторой причины, гидравлической тормозной силы или электрической тормозной силы, которая должна формироваться.
[0025] (22) Тормозная система транспортного средства согласно форме (21), в которой в случае, в котором одна из гидравлической тормозной силы и электрической тормозной силы уменьшается, другая из гидравлической тормозной силы и электрической тормозной силы изменяется.
[0026] Когда тормозная сила варьируется вследствие некоторой причины, тормозная сила, которая должна фактически формироваться, имеет тенденцию становиться меньше тормозной силы, которая должна формироваться, вместо того, чтобы становиться больше нее. Согласно этой форме, можно преодолевать варьирование одной из гидравлической тормозной силы и электрической тормозной силы в ситуации, которая с большей вероятностью должна происходить.
[0027] (23) Тормозная система транспортного средства согласно форме (22), в которой другая из гидравлической тормозной силы и электрической тормозной силы увеличивается таким образом, что она покрывает уменьшение одной из гидравлической тормозной силы и электрической тормозной силы.
[0028] Эта форма представляет собой одну форму, чтобы преодолевать ситуацию, в которой одна из гидравлической тормозной силы и электрической тормозной силы уменьшается. Другими словами, эта форма представляет собой одну конфигурацию взаимодействия гидравлической тормозной силы и электрической тормозной силы. Согласно этой форме, уменьшение одной из гидравлической тормозной силы и электрической тормозной силы покрывается посредством другой из гидравлической тормозной силы и электрической тормозной силы, за счет этого уменьшая или исключая уменьшение тормозной силы, которая должна предоставляться транспортному средству в целом (в дальнейшем называемой "полной тормозной силой" при необходимости). Здесь, "одна из гидравлической тормозной силы и электрической тормозной силы уменьшается" означает, что одна из тормозных сил меньше тормозной силы, которая должна формироваться, а именно, одна из тормозных сил является недостаточной. В этой связи, "ситуация, в которой одна из гидравлической тормозной силы и электрической тормозной силы уменьшается", в дальнейшем называется "ситуацией недостаточной тормозной силы" при необходимости.
[0029] (24) Тормозная система транспортного средства согласно форме (22), в которой другая из гидравлической тормозной силы и электрической тормозной силы снижается в соответствии с уменьшением одной из гидравлической тормозной силы и электрической тормозной силы.
[0030] Эта форма представляет собой другую форму, чтобы преодолевать ситуацию, в которой одна из гидравлической тормозной силы и электрической тормозной силы уменьшается, т.е. ситуацию недостаточной тормозной силы. Другими словами, эта форма представляет собой другую конфигурацию взаимодействия гидравлической тормозной силы и электрической тормозной силы. Эта форма позволяет уменьшать или исключать изменение распределения тормозной силы на переднее колесо и заднее колесо. Следовательно, можно уменьшать или исключать изменение ощущения от операции нажатия педали тормоза, испытываемого водителем.
[0031] (25) Тормозная система транспортного средства согласно любой из форм (22)-(24), в которой другая из гидравлической тормозной силы и электрической тормозной силы изменяется в ситуации, в которой одна из гидравлической тормозной силы и электрической тормозной силы уменьшается вследствие задержки увеличения одной из гидравлической тормозной силы и электрической тормозной силы.
[0032] Ситуация, в которой уменьшение одной из гидравлической тормозной силы и электрической тормозной силы может представлять собой ситуацию, в которой одна из тормозных сил продолжает уменьшаться в течение всего периода времени, в течение которого одна из тормозных сил формируется. Дополнительно, ситуация может представлять собой ситуацию, в которой одна из гидравлической тормозной силы и электрической тормозной силы становится меньше ожидаемой в процессе увеличения одной из тормозных сил вследствие задержки реакции относительно увеличения. Эта форма является подходящей для преодоления второй ситуации.
[0033] (26) Тормозная система транспортного средства согласно любой из форм (22)-(25), в которой оценивается то, что транспортное средство находится в ситуации, в которой одна из гидравлической тормозной силы и электрической тормозной силы уменьшается, на основе, по меньшей мере, одного из среды, в которой размещено транспортное средство, и состояния составляющего компонента тормозной системы транспортного средства, и другая из гидравлической тормозной силы и электрической тормозной силы изменяется на основе оценки.
[0034] В этой форме, когда факторы, обуславливающие уменьшение одной из гидравлической тормозной силы и электрической тормозной силы, идентифицируются посредством определения или оценки, изменяется другая из гидравлической тормозной силы и электрической тормозной силы. Согласно этой форме, можно легко преодолевать варьирование без определения варьирования фактической тормозной силы. Степень изменения другой из гидравлической тормозной силы и электрической тормозной силы может определяться в соответствии со степенью выявленных факторов.
[0035] (27) Тормозная система транспортного средства согласно форме (26), в которой оценивается то, что транспортное средство находится в ситуации, в которой одна из гидравлической тормозной силы и электрической тормозной силы уменьшается, на основе, по меньшей мере, одного из наружной температуры, атмосферного давления, температуры электромотора и напряжения аккумулятора, выполненного с возможностью подавать электрическую мощность в электромотор.
[0036] В этой форме, конкретно ограничены факторы, обуславливающие уменьшение одной из гидравлической тормозной силы и электрической тормозной силы, т.е. факторы, обуславливающие ситуацию недостаточной тормозной силы. В случае, в котором наружная температура является низкой, например, вязкость рабочей жидкости увеличивается вследствие снижения температуры рабочей жидкости гидравлического тормозного устройства. В этом случае, реакция гидравлической тормозной силы ухудшается, и гидравлическая тормозная сила становится меньше ожидаемой в процессе своего увеличения. В случае, в котором атмосферное давление является низким, реакция гидравлической тормозной силы ухудшается вследствие низкого давления рабочей жидкости в бачке, низкого давления в камере с атмосферным давлением усилителя за счет отрицательного давления и т.д., когда повышается давление рабочей жидкости в гидравлическом тормозном устройстве. В этом случае, реакция гидравлической тормозной силы ухудшается, и гидравлическая тормозная сила становится меньше ожидаемой в процессе своего увеличения. В случае, в котором температура электромотора является высокой, схема защиты работает, например, и ток питания в электромотор снижается. В этом случае, электрическая тормозная сила становится меньше ожидаемой в процессе своего увеличения. В случае, в котором напряжение аккумулятора понижается вследствие уменьшения величины заряда и т.д., ток питания в электромотор снижается. В этом случае, электрическая тормозная сила становится меньше ожидаемой в процессе своего увеличения. В этой форме, когда любой из таких факторов идентифицируется, оценивается то, что одна из гидравлической тормозной силы и электрической тормозной силы уменьшается, на основе идентификации, и другая из гидравлической тормозной силы и электрической тормозной силы изменяется в соответствии с уменьшением.
[0037] Каждое из наружной температуры и атмосферного давления может рассматриваться в качестве одного примера среды, в которой размещено транспортное средство. Каждое из температуры электромотора и напряжения аккумулятора может рассматриваться в качестве одного примера состояния составляющего компонента тормозной системы транспортного средства. Наружная температура может определяться посредством датчика наружной температуры или может получаться из информации автомобильной навигационной системы. Атмосферное давление может определяться посредством датчика атмосферного давления или может получаться из информации автомобильной навигационной системы. Температура электромотора может определяться посредством температурного датчика или может оцениваться из предыстории движения электромотора. Напряжение аккумулятора может определяться посредством датчика напряжения.
[0038] Хотя и принадлежит этой форме, может оцениваться то, что одна из гидравлической тормозной силы и электрической тормозной силы уменьшается, на основе следующих факторов, и другая из гидравлической тормозной силы и электрической тормозной силы может изменяться на основе оценки. Например, состояние, в котором воздушные пузырьки смешаны в потоке рабочей жидкости гидравлического тормозного устройства, может идентифицироваться в качестве одного фактора, обуславливающего уменьшение гидравлической тормозной силы, и электрическая тормозная сила может изменяться на основе идентификации. Это состояние может идентифицироваться посредством определения температуры рабочей жидкости, оценки из предыстории движения гидравлического тормозного устройства или оценки из взаимосвязи между рабочей величиной рабочего тормозного элемента и давлением рабочей жидкости.
[0039] В гидравлическом тормозном устройстве или электрическом тормозном устройстве, выполненном в виде дискового тормозного устройства, клиренс между дисковым ротором и тормозной колодкой может относительно существенно изменяться в зависимости от состояния поворачивания транспортного средства в состоянии, в котором тормозная колодка значительно изношена. Например, когда транспортное средство выполняет очень резкий поворот, клиренс становится относительно большим. В таком состоянии, ожидается задержка в формировании тормозной силы. С учетом этого, клиренс может оцениваться из позиции поршня, который подталкивает тормозную колодку на дисковый ротор. Дополнительно, большой клиренс может идентифицироваться в качестве одного фактора, обуславливающего уменьшение одной из гидравлической тормозной силы и электрической тормозной силы, и другая из гидравлической тормозной силы и электрической тормозной силы может изменяться на основе идентификации.
[0040] В случае, в котором электромотор используется в качестве источника приведения в движение для нагнетательного насоса, усилителя и т.п., в гидравлическом тормозном устройстве, высокая температура электромотора и низкое напряжение аккумулятора, выполненного с возможностью подавать электрическую мощность в электромотор, могут идентифицироваться в качестве факторов, обуславливающих уменьшение гидравлической тормозной силы, аналогично электрическому тормозному устройству. Электрическая тормозная сила может изменяться, когда факторы идентифицируются.
[0041] (28) Тормозная система транспортного средства согласно любой из форм (22)-(25),
- в которой одна из гидравлической тормозной силы и электрической тормозной силы, которые фактически формируются, определяется, и
- при этом идентифицируется, на основе определения, то, что транспортное средство находится в ситуации, в которой одна из гидравлической тормозной силы и электрической тормозной силы уменьшается.
[0042] В этой форме, факторы, обуславливающие уменьшение тормозной силы, не идентифицируются. Вместо этого, фактическая тормозная сила определяется, и уменьшение одной из гидравлической тормозной силы и электрической тормозной силы преодолевается на основе определения. Согласно этой форме, уменьшение фактической тормозной силы идентифицируется не на основе оценки, так что уменьшение надлежащим образом преодолевается независимо от факторов, обуславливающих уменьшение.
[0043] (29) Тормозная система транспортного средства согласно форме (28), в которой другая из гидравлической тормозной силы и электрической тормозной силы изменяется на основе определенной одной из гидравлической тормозной силы и электрической тормозной силы.
[0044] Согласно этой форме, величина изменения другой из гидравлической тормозной силы и электрической тормозной силы определяется на основе фактической величины уменьшения одной из гидравлической тормозной силы и электрической тормозной силы, так что уменьшение более надлежащим образом преодолевается. Здесь, "величина уменьшения" может рассматриваться как недостаточная величина одной из тормозных сил относительно величины тормозной силы, которая должна формироваться.
[0045] (30) Тормозная система транспортного средства согласно любой из форм (21)-(29), дополнительно содержащая рекуперативное тормозное устройство, предусмотренное для одного из переднего колеса и заднего колеса, для которого предусматривается одно из гидравлического тормозного устройства, выполненного с возможностью формировать гидравлическую тормозную силу, и электрического тормозного устройства, выполненного с возможностью формировать электрическую тормозную силу, причем рекуперативное тормозное устройство выполнено с возможностью формировать рекуперативную тормозную силу с использованием выработки электрической мощности посредством вращения одного из переднего колеса и заднего колеса, для которого предусматривается рекуперативное тормозное устройство,
- при этом, когда операция переключения выполняется для увеличения одной из гидравлической тормозной силы и электрической тормозной силы при уменьшении рекуперативной тормозной силы, другая из гидравлической тормозной силы и электрической тормозной силы изменяется таким образом, что она соответствует варьированию в ситуации, в которой одна из гидравлической тормозной силы и электрической тормозной силы варьируется.
[0046] В этой форме, тормозная система транспортного средства дополнительно включает в себя рекуперативное тормозное устройство. В большинстве транспортных средств, рекуперативная тормозная сила, сформированная посредством рекуперативного тормозного устройства, выполнена с возможностью быть замененной другой тормозной силой, например, в то время, когда скорость движения транспортного средства становится очень низкой. В частности, в случае, в котором (a) одна из гидравлической тормозной силы и электрической тормозной силы и (b) рекуперативная тормозная сила предоставляются одному из переднего колеса и заднего колеса, рекуперативная тормозная сила, предоставляемая одному из переднего колеса и заднего колеса, заменена одной из гидравлической тормозной силы и электрической тормозной силы. Эта форма является подходящей для такого случая. Когда одна из гидравлической тормозной силы и электрической тормозной силы варьируется в таком случае, другая из гидравлической тормозной силы и электрической тормозной силы, предоставляемая другому из переднего колеса и заднего колеса, изменяется, так что варьирование надлежащим образом преодолевается.
[0047] d. Конструкция гидравлического тормозного устройства
Следующие формы относятся к конструкции гидравлического тормозного устройства.
[0048] (31) Тормозная система транспортного средства согласно любой из форм (1)-(30), в которой гидравлическое тормозное устройство включает в себя:
- тело вращения, выполненное с возможностью вращаться вместе с одним из переднего колеса и заднего колеса;
- фрикционный элемент, выполненный с возможностью прижиматься к телу вращения;
- колесный тормозной цилиндр, выполненный с возможностью работать посредством рабочей жидкости, поданной в него, для прижатия фрикционного элемента к телу вращения;
- насос, выполненный с возможностью нагнетать давление на рабочую жидкость и подавать рабочую жидкость под давлением в колесный тормозной цилиндр; и
- клапан поддержания давления, выполненный с возможностью управляемо поддерживать давление рабочей жидкости, которая должна подаваться в колесный тормозной цилиндр.
[0049] Эта форма включает в себя ограничение на конструкцию гидравлического тормозного устройства. В большинстве гидравлических тормозных устройств, выполненных с возможностью управлять гидравлической тормозной силой с использованием регулирующего клапана, используются два вида регулирующих клапанов, т.е. регулирующий клапан для повышения давления рабочей жидкости, которая должна подаваться в колесный тормозной цилиндр, и регулирующий клапан для снижения давления рабочей жидкости. В гидравлическом тормозном устройстве этой формы, напротив, давление рабочей жидкости, которая должна подаваться в колесный тормозной цилиндр, снижается, например, посредством клапана поддержания давления, в то время как рабочая жидкость, имеющая высокое давление, непосредственно подается из насоса, так что давление рабочей жидкости поддерживается равным целевому давлению. Таким образом, гидравлическая тормозная сила управляется посредством только одного регулирующего клапана, а не посредством двух регулирующих клапанов. Следовательно, гидравлическое тормозное устройство может иметь компактный размер, и сама тормозная система транспортного средства, соответственно, может иметь компактный размер.
[0050] (32) Тормозная система транспортного средства согласно форме (31), в которой гидравлическое тормозное устройство дополнительно включает в себя:
- главный цилиндр, включающий в себя (a) поршень, соединенный с рабочим тормозным элементом, и (b) нагнетательную камеру, в которой на рабочую жидкость, введенную в нее, нагнетается давление посредством перемещения поршня, причем главный цилиндр выполнен с возможностью нагнетать давление на рабочую жидкость посредством рабочей силы, прикладываемой водителем к рабочему тормозному элементу;
- главная магистраль для жидкости, через который рабочая жидкость, на которую нагнетается давление в нагнетательной камере главного цилиндра, подается в колесный тормозной цилиндр; и
- клапан открытия/закрытия, выполненный с возможностью открывать и закрывать главную магистраль для жидкости,
- при этом операция колесного тормозного цилиндра посредством рабочей жидкости, поданной из главного цилиндра, и операция колесного тормозного цилиндра посредством рабочей жидкости, поданной из насоса, избирательно устанавливаются на основе рабочего режима клапана открытия/закрытия.
[0051] В гидравлическом тормозном устройстве согласно этой форме, формирование гидравлической тормозной силы, которая зависит от рабочей силы водителя через главный цилиндр, и формирование гидравлической тормозной силы посредством насоса и клапана поддержания давления независимо от рабочей силы является переключаемым. Согласно этой форме, когда отказ электрооборудования возникает в гидравлическом тормозном устройстве, формируется гидравлическая тормозная сила, которая зависит от рабочей силы, за счет чего осуществляется тормозная система транспортного средства, которая является превосходной с точки зрения отказоустойчивости. В случае, в котором электромагнитный клапан используется в качестве клапана открытия/закрытия, предпочтительно, с точки зрения отказоустойчивости, использовать нормально открытый электромагнитный клапан, а именно, электромагнитный клапан, выполненный с возможностью открывать главную магистраль для жидкости в состоянии, в котором электрический ток не подается, т.е. в состоянии без подачи питания.
[0052] (33) Тормозная система транспортного средства согласно форме (32),
- в которой гидравлическое тормозное устройство включает в себя: бачок, который содержит рабочую жидкость и из которого насос накачивает рабочую жидкость; и канал для жидкости в бачке, который соединяет бачок и насос, и
- при этом клапан поддержания давления обеспечивает возможность части рабочей жидкости, которая должна подаваться из насоса в колесный тормозной цилиндр, проходить через клапан поддержания давления, с тем чтобы регулировать давление рабочей жидкости, и часть рабочей жидкости, которая проходит через клапан поддержания давления, протекает в бачок или канал для жидкости в бачке.
[0053] В гидравлическом тормозном устройстве этой формы, рабочая жидкость, выталкиваемая из насоса, эффективно возвращается через клапан поддержания давления в состоянии, в котором гидравлическая тормозная сила формируется. Для более высокой эффективности, рабочая жидкость, которая проходит через клапан поддержания давления, предпочтительно протекает в канал для жидкости в бачке, а не в бачок. В случае, в котором рабочая жидкость, которая проходит через клапан поддержания давления, выполнена с возможностью протекать в канал для жидкости в бачке, желательно, чтобы рабочая жидкость была выполнена с возможностью протекать в канал для жидкости в бачке в позиции около насоса. Эта форма является применимой к форме, которая не использует главный цилиндр, а также к форме, которая использует главный цилиндр.
[0054] (34) Тормозная система транспортного средства согласно форме (33), в которой гидравлическое тормозное устройство включает в себя отсечной клапан, выполненный с возможностью отсекать поток рабочей жидкости в бачок или канал для жидкости в бачке, когда колесный тормозной цилиндр работает посредством рабочей жидкости, поданной из главного цилиндра в состоянии, в котором клапан открытия/закрытия открыт.
[0055] Согласно гидравлическому тормозному устройству этой формы, эффективно не допускается протекание рабочей жидкости, которая должна подаваться в колесный тормозной цилиндр, в бачок, когда формируется гидравлическая тормозная сила, которая зависит от рабочей силы. С точки зрения отказоустойчивости на предмет отказа электрооборудования, в случае, в котором электромагнитный клапан используется в качестве отсечного клапана, желательно использовать нормально закрытый электромагнитный клапан, т.е. электромагнитный клапан, выполненный с возможностью отсекать поток рабочей жидкости в состоянии, в котором электрический ток не подается в него, т.е. в состоянии без подачи питания.
[0056] (35) Тормозная система транспортного средства согласно форме (33) или (34), в которой бачок располагается около главного цилиндра, и на рабочую жидкость из бачка нагнетается давление в нагнетательной камере главного цилиндра.
[0057] В гидравлическом тормозном устройстве этой формы, можно считать, что бачок для главного цилиндра и бачок для насоса задаются общими друг для друга. Дополнительно можно считать, что насос использует бачок для главного цилиндра и накачивает рабочую жидкость из бачка. В гидравлическом тормозном устройстве этой формы, необходим только один бачок, даже когда гидравлическое тормозное устройство оснащено главным цилиндром. Таким образом, гидравлическое тормозное устройство имеет компактный размер.
[0058] (36) Тормозная система транспортного средства согласно любой из форм (32)-(35), в которой гидравлическое тормозное устройство включает в себя имитатор сопротивления ходу педали, предусмотренный в главной магистрали для жидкости и выполненный с возможностью обеспечивать возможность операции рабочего тормозного элемента обеспечивая при этом рабочему тормозному элементу противодействующую силу в соответствии с операцией рабочего тормозного элемента, когда колесный тормозной цилиндр работает посредством рабочей жидкости, поданной из насоса в состоянии, в котором клапан открытия/закрытия закрыт.
[0059] Когда клапан открытия/закрытия закрыт для формирования гидравлической тормозной силы посредством активации насоса, рабочая жидкость, на которую нагнетается давление в главном цилиндре, не подается нигде, и рабочий ход рабочего тормозного элемента не возникает. Следовательно, ощущение операции нажатия педали тормоза ухудшается. Для устранения недостатка, имитатор сопротивления ходу педали предусматривается в гидравлическом тормозном устройстве. Согласно этой форме, рабочий тормозной элемент может работать с хорошим ощущением даже в ситуации, в которой формируется гидравлическая тормозная сила, которая не зависит от рабочей силы, прикладываемой к рабочему тормозному элементу. Имитатор сопротивления ходу педали может иметь любую известную конструкцию. Например, имитатор сопротивления ходу педали может включать в себя: жидкостную камеру, которая сообщается с главной магистралью для жидкости, и объем которой является переменным; и упругое тело, выполненное с возможностью прикладывать, к рабочей жидкости в жидкостной камере, силу в соответствии с величиной увеличения объема жидкостной камеры.
[0060] (37) Тормозная система транспортного средства согласно любой из форм (31)-(36), в которой насос и клапан поддержания давления гидравлического тормозного устройства включены в модуль исполнительного устройства.
[0061] В гидравлическом тормозном устройстве этой формы, насос и клапан поддержания давления унифицируются таким образом, чтобы предусматривать единый модуль, т.е. модуль исполнительного устройства. Модуль исполнительного устройства способствует уменьшению размера гидравлического тормозного устройства. Модуль исполнительного устройства может иметь такую конструкцию, в которую включен, например, мотор для активации насоса. Дополнительно, модуль исполнительного устройства предпочтительно включает в себя канал для жидкости, который соединяет составляющие компоненты, такие как насос и клапан поддержания давления, между собой. В случае, в котором гидравлическое тормозное устройство включает в себя клапан открытия/закрытия и отсечной клапан, описанные выше, эти клапаны могут быть включены в модуль исполнительного устройства. Гидравлическое тормозное устройство предусматривается для одного из переднего колеса и заднего колеса, за счет чего модуль исполнительного устройства имеет сравнительно компактный размер.
[0062] (38) Тормозная система транспортного средства согласно любой из форм (31)-(37), в которой клапан поддержания давления представляет собой линейный электромагнитный клапан, выполненный с возможностью уменьшать давление рабочей жидкости, которая должна подаваться в колесный тормозной цилиндр, до давления в соответствии с электрическим током, поданным в линейный электромагнитный клапан.
[0063] Согласно этой форме, линейный электромагнитный клапан для снижения давления рабочей жидкости используется в качестве клапана поддержания давления, за счет чего может легко и точно управляться гидравлическая тормозная сила, которая должна формироваться посредством гидравлического тормозного устройства.
Краткое описание чертежей
[0064] Задачи, признаки, преимущества и техническая и промышленная значимость настоящего раскрытия сущности должны лучше пониматься посредством прочтения нижеприведенного подробного описания вариантов осуществления при рассмотрении в связи с прилагаемыми чертежами, на которых:
Фиг. 1 является видом, концептуально показывающим общую конструкцию тормозной системы транспортного средства согласно первому варианту осуществления;
Фиг. 2 является гидравлической принципиальной схемой гидравлического тормозного устройства тормозной системы транспортного средства, показанной на фиг. 1;
Фиг. 3A является видом в поперечном сечении колесного тормоза гидравлического тормозного устройства тормозной системы транспортного средства, показанной на фиг. 1, а фиг. 3B является видом в поперечном сечении колесного тормоза электрического тормозного устройства тормозной системы транспортного средства, показанной на фиг. 1;
Фиг. 4 является графиком, показывающим коэффициент скорости транспортного средства, используемый, когда рекуперативная тормозная сила заменена гидравлической тормозной силой в процессе замедления транспортного средства;
Фиг. 5 является графиком, показывающим изменения, с прохождением времени, рекуперативной тормозной силы, гидравлической тормозной силы и электрической тормозной силы, сформированной посредством базового управления, причем изменения вызываются с ходом выполнения операции нажатия педали тормоза;
Фиг. 6A является графиком, показывающим варьирование гидравлической тормозной силы, а фиг. 6B и 6C являются графиками, показывающими то, что электрическая тормозная сила изменяется, чтобы преодолевать варьирование;
Фиг. 7A является графиком, показывающим варьирование электрической тормозной силы, а фиг. 7B и 7C являются графиками, показывающими то, что гидравлическая тормозная сила изменяется, чтобы преодолевать варьирование;
Фиг. 8 показывает графики, соответственно, указывающие коэффициент окружающей температуры, коэффициент атмосферного давления и коэффициент градиента изменения гидравлической тормозной силы, которые используются для оценки величины уменьшения гидравлической тормозной силы;
Фиг. 9 показывает графики, соответственно, указывающие коэффициент температуры мотора, коэффициент напряжения аккумулятора и коэффициент градиента изменения электрической тормозной силы, которые используются для оценки величины уменьшения электрической тормозной силы;
Фиг. 10 является блок-схемой последовательности операций способа, показывающей программу управления тормозной силой, выполняемую в тормозной системе транспортного средства первого варианта осуществления;
Фиг. 11 является блок-схемой последовательности операций способа, показывающей вложенную процедуру для предварительной обработки в программе управления тормозной силой по фиг. 10;
Фиг. 12 является блок-схемой последовательности операций способа, показывающей вложенную процедуру для определения требуемой рекуперативной тормозной силы в программе управления тормозной силой по фиг. 10;
Фиг. 13A является блок-схемой последовательности операций способа, показывающей вложенную процедуру для оценки величины уменьшения гидравлической тормозной силы, а фиг. 13B является блок-схемой последовательности операций способа, показывающей вложенную процедуру для оценки величины уменьшения электрической тормозной силы в программе управления тормозной силой по фиг. 10;
Фиг. 14 является видом, концептуально показывающим общую конструкцию тормозной системы транспортного средства согласно второму варианту осуществления;
Фиг. 15A является графиком, показывающим варьирование гидравлической тормозной силы, которая определяется, а фиг. 15B и 15C являются графиками, показывающими то, что электрическая тормозная сила изменяется, чтобы преодолевать определенное варьирование;
Фиг. 16A является графиком, показывающим варьирование электрической тормозной силы, которая определяется, а фиг. 16B и 16C являются графиками, показывающими то, что гидравлическая тормозная сила изменяется, чтобы преодолевать определенное варьирование;
Фиг. 17 является блок-схемой последовательности операций способа, показывающей программу управления тормозной силой, выполняемую в тормозной системе транспортного средства второго варианта осуществления;
Фиг. 18 является видом, концептуально показывающим общую конструкцию тормозной системы транспортного средства согласно третьему варианту осуществления;
Фиг. 19 является гидравлической принципиальной схемой гидравлического тормозного устройства тормозной системы транспортного средства, показанной на фиг. 18; и
Фиг. 20 является блок-схемой последовательности операций способа, концептуально показывающей управление тормозными силами в тормозной системе транспортного средства третьего варианта осуществления.
Подробное описание вариантов осуществления
[0065] Со ссылкой на чертежи, подробнее поясняются варианты осуществления тормозной системы транспортного средства согласно различным формам, указываемым выше, и модификациям вариантов осуществления. Следует понимать, что тормозная система транспортного средства согласно настоящему раскрытию сущности не ограничена подробностями нижеприведенных вариантов осуществления и форм, описанных в разделе "Различные формы", и может изменяться и модифицироваться на основе знаний специалистов в данной области техники.
Вариант 1 осуществления
[0066] A. Краткий обзор приводной системы транспортного средства и тормозной системы транспортного средства
Как схематично показано на фиг. 1, транспортное средство, на котором устанавливается тормозная система транспортного средства согласно первому варианту осуществления, представляет собой гибридное транспортное средство, имеющее два передних колеса 10F и два задних колеса 10R, и два передних колеса 10F являются ведущими колесами. Сначала поясняется приводная система транспортного средства. Приводная система транспортного средства, установленная на настоящем транспортном средстве, включает в себя двигатель 12 в качестве источника приведения в движение, генератор 14, который выступает главным образом в качестве электрогенератора, механизм 16 распределения мощности, с которым соединяются двигатель 12 и генератор 14, и электромотор 18 в качестве другого источника приведения в движение.
[0067] Механизм 16 распределения мощности имеет функцию распределения вращения двигателя 12 на вращение генератора 14 и вращение выходного вала. Электромотор 18 соединяется с выходным валом через редукторный механизм 20, выступающий в качестве редуктора. Вращение выходного вала передается на передние левое и правое колеса 10F через дифференциальный механизм 22 и соответствующие ведущие валы 24L, 24R, так что передние левое и правое колеса 10F вращаются с возможностью приведения в действие. Генератор 14 соединяется с аккумулятором 28 через инвертор 26G. Электрическая мощность, полученная посредством выработки электрической мощности генератора 14, накапливается в аккумуляторе 28. Электромотор 18 соединяется с аккумулятором 28 через инвертор 26M. Электромотор 18 и генератор 14 управляются посредством управления инвертором 26M и инвертором 26G.
[0068] Как схематично показано на фиг. 1, тормозная система транспортного средства первого варианта осуществления, установленная на настоящем транспортном средстве, включает в себя (a) рекуперативное тормозное устройство 30, выполненное с возможностью предоставлять тормозную силу каждому из двух передних колес 10F, (b) гидравлическое тормозное устройство 32, выполненное с возможностью предоставлять тормозную силу каждому из двух задних колес 10R, и (c) электрическое тормозное устройство 34, выполненное с возможностью предоставлять тормозную силу каждому из двух передних колес 10F, независимо от тормозной силы, предоставляемой посредством рекуперативного тормозного устройства 30. В тормозной системе транспортного средства, гидравлическое тормозное устройство 32 предусматривается не для обоих из передних колес 10F и задних колес 10R, а только для задних колес 10R. Таким образом, гидравлическое тормозное устройство 32 является компактным, и сама тормозная система транспортного средства, соответственно, является компактной.
[0069] B. Конструкция рекуперативного тормозного устройства
С точки зрения оборудования, рекуперативное тормозное устройство 30 составляет часть приводной системы транспортного средства. Когда транспортное средство замедляется, электромотор 18 вращается посредством вращения передних колес 10F без приема подачи питания из аккумулятора 28. Электромотор 18 вырабатывает электрическую мощность с использованием электродвижущей силы, сформированной посредством своего вращения, и вырабатываемая электрическая мощность накапливается, через инвертор 26M, в аккумуляторе 28 в качестве количества электричества (которое также может называться "электрической величиной" или "электрическим зарядом"). Таким образом, электромотор 18 выступает в качестве электрогенератора, так что аккумулятор 28 заряжается. Вращение передних колес 10F замедляется, а именно, транспортное средство замедляется на величину, соответствующую энергии, которая соответствует заряженной электрической величине. В настоящем транспортном средстве, рекуперативное тормозное устройство 30 имеет такую конфигурацию. Тормозная сила, предоставляемая посредством рекуперативного тормозного устройства 30 в передним колесам 10F (в дальнейшем называемая "рекуперативной тормозной силой" при необходимости), зависит от величины вырабатываемой электрической мощности, и сформированная рекуперативная тормозная сила управляется посредством управления инвертором 26M. Подробное пояснение рекуперативного тормозного устройства 30 опускается, поскольку любое рекуперативное тормозное устройство, имеющее известную обычную конструкцию, может использоваться в качестве рекуперативного тормозного устройства 30.
[0070] C. Конструкция гидравлического тормозного устройства
i) Общая конструкция
Гидравлическое тормозное устройство 32 включает в себя (a) главный цилиндр 42, с которым соединяется педаль 40 тормоза, в качестве рабочего тормозного элемента, который должен управляться водителем, (b) модуль 44 исполнительного устройства, выполненный с возможностью обеспечивать возможность рабочей жидкости из главного цилиндра 42 проходить через себя, с тем чтобы подавать рабочую жидкость, или выполненный с возможностью регулировать давление рабочей жидкости, на которую нагнетается давление посредством ее насоса (который поясняется ниже), с тем чтобы подавать рабочую жидкость, и (c) два колесных тормоза 46, соответственно, предусмотренные для правого и левого задних колес 10R и выполненные с возможностью замедлять вращение соответствующих правого и левого задних колес 10R посредством давления рабочей жидкости, поданной из модуля 44 исполнительного устройства. Гидравлическое тормозное устройство 32 представляет собой устройство с двумя системами или тандемного типа, соответствующими правому и левому задним колесам 10. Модуль 44 исполнительного устройства может рассматриваться в качестве тормозного исполнительного устройства, в котором множество составляющих компонентов унифицируются. Модуль 44 исполнительного устройства выступает в качестве регулятора давления, выполненного с возможностью регулировать давление рабочей жидкости и подавать рабочую жидкость с отрегулированным давлением.
[0071] ii) Конструкция главного цилиндра
Как показано на фиг. 2, главный цилиндр 42 представляет собой устройство с цилиндром тандемного типа, включающее в себя, в корпусе, два поршня 42a, размещенные последовательно и соединенные с педалью 40 тормоза, и две нагнетательные камеры 42b, в каждой из которых на рабочую жидкость, которая введена, нагнетается давление посредством перемещения соответствующего одного из поршней 42a. Бачок 48, который содержит рабочую жидкость при атмосферном давлении, располагается около главного цилиндра 42. На рабочую жидкость из бачка 48 нагнетается давление в каждой из двух нагнетательных камер 42b. Главный цилиндр 42 выполнен с возможностью подавать, в модуль 44 исполнительного устройства, рабочую жидкость, давление которой соответствует силе, прикладываемой к педали 40 тормоза (в дальнейшем называемой "рабочей тормозной силой" при необходимости) для соответствующих двух систем, которые соответствуют соответствующим двум задним колесам 10R. В частности, модуль 44 исполнительного устройства имеет каналы для жидкости, через которые рабочая жидкость, подаваемая из главного цилиндра 42, протекает к соответствующим колесным тормозам 46. Таким образом, гидравлическое тормозное устройство 32 имеет два канала для жидкости, через которые рабочая жидкость подается из главного цилиндра 42 в соответствующие колесные тормоза 46, т.е. в две главных магистрали 50 для жидкости. В гидравлическом тормозном устройстве 32, рабочая жидкость может подаваться из главного цилиндра 42 в колесные тормоза 46 через соответствующие главные магистрали 50 для жидкости. Каждый из колесных тормозов 46 имеет колесный тормозной цилиндр (который поясняется ниже), и рабочая жидкость подается в колесный тормозной цилиндр.
[0072] С одним из двух главных магистралей 50 для жидкости соединяется имитатор 54 сопротивления ходу педали через клапан 52 открытия имитатора, который представляет собой нормально закрытый электромагнитный клапан открытия/закрытия. В нормальном рабочем состоянии, в котором не возникает отказ электрооборудования, в клапан 52 открытия имитатора подается питание с переводом в открытое состояние клапана, так что имитатор 54 сопротивления ходу педали работает. В нормальном рабочем состоянии, два главных отсечных клапана 56, которые представляют собой электромагнитные клапаны открытия/закрытия и которые предусматриваются в модуле 44 исполнительного устройства таким образом, что они соответствуют двум системам, переводятся в закрытое состояние клапана, так что имитатор 54 сопротивления ходу педали разрешает ход нажатия педали 40 тормоза и предоставляет, педали 40 тормоза, противодействующую рабочую силу в соответствии с ходом нажатия. Таким образом, имитатор 54 сопротивления ходу педали имеет функцию улучшения ощущения от операции нажатия педали тормоза, испытываемого водителем в нормальном рабочем состоянии. Имитатор 54 сопротивления ходу педали настоящего варианта осуществления имеет известную конструкцию. Например, имитатор 54 сопротивления ходу педали включает в себя: жидкостную камеру, которая сообщается с главной магистралью 50 для жидкости, и объем которой является переменным; и упругое тело, выполненное с возможностью прикладывать, к рабочей жидкости в жидкостной камере, силу в соответствии с величиной увеличения объема жидкостной камеры. Таким образом, имитатор 54 сопротивления ходу педали подробно не поясняется здесь.
[0073] iii) Конструкция модуля исполнительного устройства
Модуль 44 исполнительного устройства включает в себя: два главных отсечных клапана 56, каждый из которых выступает в качестве нормально открытого электромагнитного клапана открытия/закрытия, выполненного с возможностью открывать и закрывать соответствующие две главных магистрали 50 для жидкости; два насоса 60, которые соответствуют двум системам; мотор 62 для приведения в действие насосов 60; два клапана 64 поддержания давления (клапана регулирования давления), каждый из которых выступает в качестве линейного электромагнитного клапана, соответствующего двум системам; два отсечных клапана 66, каждый из которых выступает в качестве нормально закрытого электромагнитного клапана открытия/закрытия, расположенного последовательно с соответствующими клапанами 64 поддержания давления; и два контрольных клапана 68, расположенных параллельно с соответствующими клапанами 64 поддержания давления. В гидравлическом тормозном устройстве 32, предусматривается только один бачок, и два насоса 60 выполнены с возможностью накачивать рабочую жидкость из бачка 48. С этой целью, формируется канал 69 для жидкости в бачке, который соединяет два насоса 60 и бачок 48, и часть канала 69 для жидкости в бачке расположена в модуле 44 исполнительного устройства. Каждый из насосов 60 соединяется с соответствующей главной магистралью 50 для жидкости на выходной стороне и подает, в соответствующий колесный тормоз 46, рабочую жидкость под давлением через часть главной магистрали 50 для жидкости. На выходной стороне каждого насоса 60, предусматривается буфер 70 для уменьшения пульсирующего изменения давления рабочей жидкости, выталкиваемой из соответствующего насоса 60. В модуле 44 исполнительного устройства, формируются два обратных канала 71, каждый из которых располагается параллельно с соответствующим насосом 60 и соединяет соответствующую главную магистраль 50 для жидкости и канал 69 для жидкости в бачке между собой. Клапан 64 поддержания давления и отсечной клапан 66 предусматриваются на каждом из двух обратных каналов 71. Клапан 64 поддержания давления имеет функцию регулирования давления рабочей жидкости, которая должна подаваться в колесный тормоз 46. С учетом этого, клапан 64 поддержания давления также может упоминаться как "клапан регулирования давления". Отсечной клапан 66 имеет функцию перекрытия рабочей жидкости, которая должна подаваться в колесный тормоз 46. С учетом этого, отсечной клапан 66 также может упоминаться как "перекрывающий клапан".
[0074] В нормальном рабочем состоянии, главные отсечные клапаны 56 находятся в закрытом состоянии клапана, в то время как отсечные клапаны 66 находятся в открытом состоянии клапана. Когда насосы 60 приводятся в действие посредством мотора 62, на рабочую жидкость в бачке 48 нагнетается давление, и рабочая жидкость под давлением подается в колесные тормоза 46. Каждый клапан 64 поддержания давления имеет функцию регулирования давления рабочей жидкости, которая должна подаваться в соответствующий колесный тормоз 46, до давления в соответствии с электрическим током, поданным в клапан 64 поддержания давления. Другими словами, каждый клапан 64 поддержания давления выполнен в виде линейного электромагнитного клапана для уменьшения давления, имеющего функцию снижения давления рабочей жидкости, которая должна подаваться в колесный тормоз 46. В гидравлическом тормозном устройстве 32, рабочая жидкость, давление которой регулируется посредством управления клапанами 64 поддержания давления, подается в колесные тормоза 46 независимо от давления рабочей жидкости, поданной из главного цилиндра 42, а именно, независимо от рабочей тормозной силы, прикладываемой к педали 40 тормоза. Клапан 64 поддержания давления представляет собой клапан уменьшения давления, и рабочая жидкость проходит через клапан 64 поддержания давления для регулировки давления. Рабочая жидкость, которая проходит через каждый клапан 64 поддержания давления, возвращается в канал 69 для жидкости в бачке и, соответственно, в бачок 48 через соответствующий обратный канал 71 и соответствующий отсечной клапан 66 в открытом состоянии клапана.
[0075] В случае, в котором гидравлическое тормозное устройство 32 подвержено отказу электрооборудования, главные отсечные клапаны 56 переводятся в открытое состояние клапана, в то время как отсечные клапаны 66 переводятся в закрытое состояние клапана, так что рабочая жидкость, поданная из главного цилиндра 42 в модуль 44 исполнительного устройства, подается в колесные тормоза 46. Другими словами, когда колесные тормозные цилиндры (которые поясняются ниже) работают посредством рабочей жидкости, поданной из главного цилиндра 42 в состоянии, в котором главные отсечные клапаны 56, каждый из которых выступает в качестве клапана открытия/закрытия, открыты, каждый отсечной клапан 66 отсекает поток рабочей жидкости в бачок 48 или канал 69 для жидкости в бачке. Два датчика давления в колесном тормозном цилиндре 72 и два датчика 74 давления в главном цилиндре предусматриваются таким образом, что они соответствуют двум системам. Каждый датчик давления в колесном тормозном цилиндре 72 выполнен с возможностью определять давление рабочей жидкости, которая должна подаваться в соответствующий колесный тормоз 46 (в дальнейшем называемое "давлением в колесном тормозном цилиндре" при необходимости). Каждый датчик 74 давления в главном цилиндре выполнен с возможностью определять давление рабочей жидкости, поданной из главного цилиндра 42 (в дальнейшем называемое "давлением в главном цилиндре" при необходимости).
[0076] iv) Конструкция колесного тормоза
Каждый колесный тормоз 46 для прекращения вращения соответствующего заднего колеса 10R представляет собой дисковое тормозное устройство, схематично показанное на фиг. 3A. Каждый колесный тормоз 46 включает в себя дисковый ротор 80, в качестве тела вращения, выполненного с возможностью вращаться вместе с соответствующим задним колесом 10R, и суппорт 82, поддерживаемый с возможностью перемещения посредством водила, которое удерживает с возможностью вращения заднее колесо 10R. Суппорт 82 включает в себя колесный тормозной цилиндр 84, корпус которого задается посредством части суппорта 82. Пара тормозных колодок 88, каждая из которых выступает в качестве фрикционного элемента, предусматривается таким образом, что одна тормозная колодка 88 присоединяется и удерживается посредством дальнего конца поршня 86 колесного тормозного цилиндра 84, а другая тормозная колодка 88 присоединяется и удерживается посредством участка суппорта 82, расположенного напротив его участка, в который включен колесный тормозной цилиндр 84. Таким образом, две тормозных колодки 88 располагаются напротив друг друга, при этом дисковый ротор 80 размещается между ними.
[0077] Рабочая жидкость подается из модуля 44 исполнительного устройства в жидкостную камеру 90 колесного тормозного цилиндра 84, и давление рабочей жидкости заставляет тормозные колодки 88 зажимать дисковый ротор 80 между ними. Таким образом, колесный тормозной цилиндр 84 работает с возможностью заставлять тормозные колодки 88 подталкиваться на дисковый ротор 80. Таким образом, каждый колесный тормоз 46 формирует, с использованием силы трения, тормозную силу, чтобы прекращать вращение соответствующего заднего колеса 10R, т.е. тормозную силу для того, чтобы тормозить транспортное средство (в дальнейшем называемую "гидравлической тормозной силой" при необходимости). Гидравлическая тормозная сила имеет абсолютную величину в соответствии с давлением рабочей жидкости, поданной из модуля 44 исполнительного устройства. Колесные тормоза 46 имеют известную обычную конструкцию, и их подробное пояснение опускается.
[0078] В гидравлическом тормозном устройстве 32, давление рабочей жидкости, которая должна подаваться в колесный тормозной цилиндр 84, снижается посредством клапана 64 поддержания давления, в то время как рабочая жидкость, имеющая высокое давление, непосредственно подается из насоса 60, за счет чего давление рабочей жидкости поддерживается равным целевому давлению. Таким образом, гидравлическая тормозная сила, которая должна формироваться посредством каждого колесного тормоза 46, управляется посредством только одного регулирующего клапана, а не посредством двух регулирующих клапанов. Следовательно, модуль 44 исполнительного устройства гидравлического тормозного устройства 32 имеет компактный размер, так что гидравлическое тормозное устройство в целом, соответственно, имеет компактный размер. Дополнительно, сама тормозная система транспортного средства имеет компактный размер.
[0079] D. Конструкция электрического тормозного устройства
Как показано на фиг. 1, электрическое тормозное устройство 34 включает в себя пару колесных тормозов 100 для прекращения вращения соответствующих передних колес 10F. Как показано на фиг. 3B, каждый колесный тормоз 100 является аналогичным по конструкции колесным тормозам 46 гидравлического тормозного устройства 32. Каждый колесный тормоз 46 работает посредством давления рабочей жидкости, тогда как каждый колесный тормоз 100 работает посредством мощности электромотора.
[0080] Каждый колесный тормоз 100 включает в себя дисковый ротор 102, в качестве тела вращения, выполненного с возможностью вращаться вместе с соответствующим передним колесом 10F и суппортом 104, поддерживаемым с возможностью перемещения посредством водила, которое удерживает с возможностью вращения соответствующее переднее колесо 10F. Суппорт 104 включает в себя электрическое исполнительно устройство 106. Электрическое исполнительное устройство 106 включает в себя (a) плунжер 108, удерживаемый посредством суппорта 104 таким образом, что он является выдвигаемым и задвигаемым, (b) резьбовой стержень 110, который удерживается посредством суппорта 104 таким образом, что он является невращающимся, и таким образом, что он является выдвигаемым и задвигаемым относительно дискового ротора 102, и который имеет наружную резьбу, сформированную на внешней окружности, (c) гайку 112, которая имеет внутреннюю резьбу, которая удерживается в зацеплении с наружной резьбой резьбового стержня 110 и которая удерживается посредством суппорта 104 таким образом, что она является вращающейся, и таким образом, что она не является выдвигаемой и задвигаемой относительно дискового ротора 102 и, (d) электромотор 114, выполненный с возможностью вращать гайку 112. Электромотор 114 включает в себя: магниты 116, присоединенные к внешней окружности гайки 112; и катушки 118, удерживаемые посредством суппорта 104.
[0081] Пара тормозных колодок 120, каждая из которых выступает в качестве фрикционного элемента, предусматривается таким образом, что одна тормозная колодка 120 присоединяется и удерживается посредством дальнего конца плунжера 108 электрического исполнительного устройства 106, и другая тормозная колодка 120 присоединяется и удерживается посредством участка суппорта 104, расположенного напротив его участка, в котором располагается электрическое исполнительно устройство 106. Таким образом, две тормозных колодки 120 располагаются напротив друг друга, при этом дисковый ротор 102 размещается между ними. Электрическое исполнительное устройство 106 имеет такую конфигурацию, в которой тормозные колодки 120 подталкиваются на дисковый ротор 102 посредством вращения электромотора 114 в качестве источника приведения в движение. Другими словами, электрическое исполнительно устройство 106 включает в себя механизм, состоящий из плунжера 108, резьбового стержня 110 и гайки 112, а именно, механизм преобразования движения для перемещения фрикционных элементов посредством мощности электромотора 114. Таким образом, каждый колесный тормоз 100 электрического тормозного устройства 34 управляет силой, которая должна формироваться посредством электромотора 114, и прикладывает силу в качестве силы для прекращения или замедления вращения колеса через механизм преобразования движения.
[0082] Таким образом, каждый колесный тормоз 100 электрического тормозного устройства 34 формирует, с использованием силы трения, тормозную силу для того, чтобы прекращать вращение соответствующего переднего колеса 10F, а именно, тормозную силу для того, чтобы тормозить транспортное средство (в дальнейшем называемую "электрической тормозной силой" при необходимости). Электрическая тормозная сила зависит от толкающей силы, посредством которой тормозная колодка 120 подталкивается посредством плунжера 108. Каждый колесный тормоз 100 имеет датчик 122 толкающей силы, в качестве датчика нагрузки, предусмотренный между плунжером 108 и тормозной колодкой 120 для определения толкающей силы. Колесные тормоза 100 имеют известную обычную конструкцию, и их подробное пояснение опускается. Как показано на фиг. 1, электрический ток подается в электромотор 114 каждого колесного тормоза 100 из вспомогательного аккумулятора 124, отличающегося от аккумулятора 28.
[0083] E. Управление тормозной системой транспортного средства
i) Контроллер
Управление настоящей тормозной системой, а именно, управление тормозной силой F, выполняется посредством электронного модуля 130 управления (ECU), в качестве контроллера, показанного на фиг. 1. (Соответствующие тормозные силы совместно упоминаются в качестве "тормозной силы F" при необходимости). ECU 130 включает в себя компьютер и средства приведения в действие (схемы приведения в действие, драйверы) для компонентов, которые должны управляться. В частности, ECU 130 управляет инверторами 26G, 26M, которые составляют рекуперативное тормозное устройство 30, клапанами 64 поддержания давления модуля 44 исполнительного устройства, которые составляют гидравлическое тормозное устройство 32, и электромоторами 114 колесных тормозов 100, которые составляют электрическое тормозное устройство 34, за счет этого управляя рекуперативной тормозной силой FRG, гидравлической тормозной силой FHY и электрической тормозной силой FEM. Следовательно, полная тормозная сила FSUM, которая является тормозной силой F, которая должна предоставляться в транспортное средство в целом, управляется.
[0084] ii) Краткий обзор базового управления
При базовом управлении настоящей тормозной системой, требуемая полная тормозная сила FSUM*, которая является тормозной силой F, требуемой для транспортного средства в целом (т.е. суммой тормозных сил F, которые должны предоставляться в четыре колеса 10), определяется на основе операции нажатия педали 40 тормоза. В частности, педаль 40 тормоза содержит датчик 132 рабочей силы для определения рабочей силы δ нажатия педали 40 тормоза, как показано на фиг. 1 и 2. ECU 130 получает требуемую полную тормозную силу FSUM* посредством умножения рабочей силы δ, определенной посредством датчика 132 рабочей силы, на коэффициент αF тормозной силы. Рабочая сила δ является одним примером рабочего значения, указывающего степень операции нажатия педали 40 тормоза, а именно, указывающего степень операции нажатия педали тормоза, и может рассматриваться как параметр, указывающий требуемую полную тормозную силу FSUM*.
[0085] В настоящей тормозной системе, предпочтительно формируется рекуперативная тормозная сила FRG, и гидравлическая тормозная сила FHY и электрическая тормозная сила FEM покрывают нехватку в требуемой полной тормозной силе FSUM*, которая не может покрываться посредством рекуперативной тормозной силы FRG. Нехватка называется "недостаточной тормозной силой FIS". Рекуперативная тормозная сила FRG, гидравлическая тормозная сила FHY и электрическая тормозная сила FEM соответствуют сумме тормозных сил F, которые должны предоставляться в два колеса 10, т.е. два передних колеса 10F или два задних колеса 10R, соответственно, посредством рекуперативного тормозного устройства 30, гидравлического тормозного устройства 32 и электрического тормозного устройства 34. Фактически, предоставляется, каждому из двух передних колес 10F или каждому из двух задних колес 10R, половина рекуперативной тормозной силы FRG, половина гидравлической тормозной силы FHY и половина электрической тормозной силы FEM. Для краткости, два передних колеса 10F рассматриваются в качестве виртуального одного переднего колеса 10F, и два задних колеса 10R рассматриваются в качестве виртуального одного заднего колеса 10R, и нижеприведенное пояснение приводится с пониманием того, что рекуперативная тормозная сила FRG, гидравлическая тормозная сила FHY и электрическая тормозная сила FEM предоставляются одному переднему колесу 10F или одному заднему колесу 10R.
[0086] Ниже конкретно поясняется управление тормозной силой F. Первоначально, максимальная рекуперативная тормозная сила FRG-MAX, которая является рекуперативной тормозной силой FRG, которая может формироваться в это время, идентифицируется на основе состояния заряда (SOC) аккумулятора 28, скорости движения транспортного средства и т.д. В случае, в котором требуемая полная тормозная сила FSUM* равна или меньше максимальной рекуперативной тормозной силы FRG-MAX, требуемая рекуперативная тормозная сила FRG*, которая является рекуперативной тормозной силой FRG, которая требуется, определяется в качестве требуемой полной тормозной силы FSUM*. С другой стороны, в случае, в котором требуемая полная тормозная сила FSUM* превышает максимальную рекуперативную тормозную силу FRG-MAX, требуемая рекуперативная тормозная сила FRG* определяется в качестве максимальной рекуперативной тормозной силы FRG-MAX.
[0087] Затем, недостаточная тормозная сила FIS определяется посредством вычитания требуемой рекуперативной тормозной силы FRG* из требуемой полной тормозной силы FSUM*. Посредством соответствующего умножения недостаточной тормозной силы FIS на коэффициент βHY распределения гидравлической тормозной силы и коэффициент βEM распределения электрической тормозной силы (βHY+βEM=1), определяются требуемая гидравлическая тормозная сила FHY*, которая является гидравлической тормозной силой FHY, которая должна формироваться, и требуемая электрическая тормозная сила FEM*, которая является электрической тормозной силой FEM, которая должна формироваться. Здесь, коэффициент βHY распределения гидравлической тормозной силы служит для получения величины гидравлической тормозной силы FHY, которая должна быть распределена на заднее колесо 10R, и коэффициент βEM распределения электрической тормозной силы служит для получения величины электрической тормозной силы FEM, которая должна быть распределена на переднее колесо 10F.
[0088] Рекуперативное тормозное устройство 30, гидравлическое тормозное устройство 32 и электрическое тормозное устройство 34 управляются на основе требуемой рекуперативной тормозной силы FRG*, требуемой гидравлической тормозной силы FHY* и требуемой электрической тормозной силы FEM*, определенных так, как описано выше, за счет чего полная тормозная сила FSUM на основе требуемой полной тормозной силы FSUM* предусматривается транспортному средству. Требуемая рекуперативная тормозная сила FRG*, требуемая гидравлическая тормозная сила FHY* и требуемая электрическая тормозная сила FEM* могут рассматриваться в качестве целей тормозных сил F, которая должна формироваться, соответственно, посредством рекуперативного тормозного устройства 30, гидравлического тормозного устройства 32 и электрического тормозного устройства 34. В этом смысле, эти тормозные силы FRG*, FHY* и FEM*, соответственно, могут упоминаться в качестве целевой рекуперативной тормозной силы, целевой гидравлической тормозной силы и целевой электрической тормозной силы.
[0089] Когда скорость v движения транспортного средства ниже пороговой скорости v0 (например, 10 км/час) во время начала операции нажатия педали тормоза, а именно, в начале нажатия педали тормоза 40, рекуперативная тормозная сила FRG не формируется до конца этой операции нажатия педали тормоза. Когда скорость v движения транспортного средства становится ниже пороговой скорости v0 как результат операции нажатия педали тормоза, рекуперативная тормозная сила FRG, которая формируется, постепенно уменьшается до 0, так что она заменяется гидравлической тормозной силой FHY до того, как скорость v движения транспортного средства становится равной пороговой скорости v1 (например, 5 км/час) ниже пороговой скорости v0, и гидравлическая тормозная сила FHY постепенно увеличивается на величину, соответствующую величине уменьшения рекуперативной тормозной силы FRG. Другими словами, выполняется операция переключения, в которой гидравлическая тормозная сила FHY увеличивается, в то время как рекуперативная тормозная сила FRG снижается. В частности, коэффициент CRG(v) скорости транспортного средства, который использует скорость v движения транспортного средства в качестве параметра, задается так, как показано на графике по фиг. 4. Посредством умножения требуемой рекуперативной тормозной силы FRG* на коэффициент CRG(v) скорости транспортного средства определяется величина dFRG уменьшения рекуперативной тормозной силы. Посредством вычитания величины dFRG уменьшения рекуперативной тормозной силы из требуемой рекуперативной тормозной силы FRG* и суммирования величины dFRG уменьшения рекуперативной тормозной силы с требуемой гидравлической тормозной силой FHY*, корректируются требуемая рекуперативная тормозная сила FRG* и требуемая гидравлическая тормозная сила FHY*. Следует отметить, что пороговая скорость v0, используемая в начале операции нажатия педали тормоза, и пороговая скорость v0, используемая, когда скорость v движения транспортного средства становится более низкой, могут отличаться друг от друга.
[0090] Фиг. 5 показывает один пример изменений, с прохождением времени, рекуперативной тормозной силы FRG, гидравлической тормозной силы FHY и электрической тормозной силы FEM, сформированной согласно базовому управлению, описанному выше, причем изменения вызываются по мере того, как выполняется операция нажатия педали тормоза. На фиг. 5, также показано изменение требуемой полной тормозной силы FSUM*. Фиг. 5 показывает изменения в случае, если операция нажатия педали тормоза начинается, когда скорость v движения транспортного средства выше пороговой скорости v0, и если требуемая полная тормозная сила FSUM* превышает максимальную рекуперативную тормозную силу FRG-MAX.
[0091] В примере, показанном на фиг. 5, когда требуемая полная тормозная сила FSUM* увеличивается после того, как операция нажатия педали тормоза начата, требуемая полная тормозная сила FSUM* покрывается посредством рекуперативной тормозной силы FRG до того, как рекуперативная тормозная сила FRG превышает максимальную рекуперативную тормозную силу FRG-MAX.. С момента времени, когда рекуперативная тормозная сила FRG превышает максимальную рекуперативную тормозную силу FRG-MAX, гидравлическая тормозная сила FHY и электрическая тормозная сила FEM формируются при коэффициенте распределения (βHY:βEM) на основе коэффициента βHY распределения гидравлической тормозной силы и коэффициента βEM распределения электрической тормозной силы, с тем чтобы покрывать недостаточную тормозную силу FIS. В период времени с момента времени, когда скорость v движения транспортного средства становится ниже пороговой скорости v0, до момента времени, когда скорость v движения транспортного средства становится равной пороговой скорости v1 по мере того, как выполняется операция нажатия педали тормоза, рекуперативная тормозная сила FRG снижается, и гидравлическая тормозная сила FHY увеличивается на величину уменьшения рекуперативной тормозной силы FRG. В конце операции нажатия педали тормоза, требуемая полная тормозная сила FSUM* снижается, и гидравлическая тормозная сила FHY и электрическая тормозная сила FEM снижаются.
[0092] Согласно базовому управлению, поясненному выше, предпочтительно формируется рекуперативная тормозная сила FRG, и гидравлическая тормозная сила FHY и электрическая тормозная сила FEM покрывают нехватку в требуемой полной тормозной силе FSUM*, которая не может покрываться посредством рекуперативной тормозной силы FRG, а именно, гидравлическая тормозная сила FHY и электрическая тормозная сила FEM покрывают недостаточную тормозную силу FIS. Дополнительно, гидравлическая тормозная сила FHY и электрическая тормозная сила FEM формируются при заданном коэффициенте распределения (βHY:βEM). Другими словами, рекуперативная тормозная сила FRG, гидравлическая тормозная сила FHY и электрическая тормозная сила FEM взаимодействуют, как описано выше в тормозной системе настоящего варианта осуществления.
[0093] iii) Варьирование гидравлической тормозной силы и варьирование электрической тормозной силы
Гидравлическая тормозная сила FHY и электрическая тормозная сила FEM могут варьироваться или колебаться вследствие среды, в которой размещено транспортное средство, и состояния составляющих компонентов гидравлического тормозного устройства 32 и электрического тормозного устройства 34. Например, когда транспортное средство размещено в среде с низкой температурой, температура рабочей жидкости понижается, и вязкость рабочей жидкости, соответственно, увеличивается. В этом случае, реакция гидравлической тормозной силы FHY ухудшается, и гидравлическая тормозная сила FHY становится меньше требуемой гидравлической тормозной силы FHY* в некоторой степени в процессе увеличения гидравлической тормозной силы FHY. Когда транспортное средство движется в высотной области, давление рабочей жидкости в бачке 48 понижается, так что гидравлическая тормозная сила FHY становится меньше требуемой гидравлической тормозной силы FHY* в некоторой степени в процессе увеличения гидравлической тормозной силы FHY. Например, вследствие задержки увеличения гидравлической тормозной силы FHY, гидравлическая тормозная сила FHY уменьшается в процессе своего увеличения, к примеру, когда операция нажатия педали тормоза начинается, или когда скорость v движения транспортного средства становится ниже пороговой скорости v0, как показано на фиг. 6A.
[0094] Когда температура электромотора 114 электрического тормозного устройства 34 повышается, схема защиты работает таким образом, чтобы уменьшать ток питания в электромотор 114. Дополнительно, когда состояние заряда (SOC) вспомогательного аккумулятора 124 для подачи электрического тока в электромотор 114 понижается, и напряжение вспомогательного аккумулятора 124, соответственно, понижается, ток питания в электромотор 114 уменьшается. В случае, в котором ток питания в электромотор 114 уменьшается, скорость движения плунжера 108 становится низкой, и электрическая тормозная сила FEM, соответственно, становится меньше требуемой электрической тормозной силы FEM* в некоторой степени. Например, вследствие задержки увеличения электрической тормозной силы FEM, электрическая тормозная сила FEM уменьшается в процессе ее увеличения, а именно, когда операция нажатия педали тормоза начинается, как показано на фиг. 7A. В каждом колесном тормозе 100 наружная резьба резьбового стержня 110 и внутренняя резьба гайки 112 поддерживаются в зацеплении между собой, и, следовательно, разность между положительной эффективностью (прямой эффективностью) и отрицательной эффективностью (обратной эффективностью) является большой. Таким образом, даже если ток питания в электромотор 114 уменьшается, электрическая тормозная сила FEM в неподвижном состоянии не уменьшается.
[0095] iv) Меры для преодоления уменьшения гидравлической тормозной силы и уменьшения электрической тормозной силы
Настоящая тормозная система транспортного средства, в случае персонификации, идентифицирует факторы, обуславливающие варьирование гидравлической тормозной силы FHY и варьирование электрической тормозной силы FEM, а именно, факторы, обуславливающие уменьшения гидравлической тормозной силы FHY и уменьшение электрической тормозной силы FEM, и оценивает то, что транспортное средство находится в ситуации, в которой одна из гидравлической тормозной силы FHY и электрической тормозной силы FEM варьируется, а именно, уменьшается. Дополнительно, настоящая тормозная система изменяет, на основе оценки, другую из гидравлической тормозной силы FHY и электрической тормозной силы FEM. Другими словами, в ситуации недостаточной тормозной силы, в которой гидравлическая тормозная сила FHY и электрическая тормозная сила FEM является недостаточной, настоящая тормозная система преодолевает ситуацию.
[0096] Как показано на фиг. 1, настоящая тормозная система оснащена датчиком 134 окружающей температуры для определения окружающей температуры TE, которая является температурой среды, в которой размещено транспортное средство, датчиком 136 атмосферного давления для определения атмосферного давления PA и датчиком 138 напряжения аккумулятора для определения напряжения VB аккумулятора, которое является выходным напряжением вспомогательного аккумулятора 124. Как показано на фиг. 3B, настоящая тормозная система дополнительно оснащена датчиками 140 температуры мотора, каждый из которых предназначен для определения температуры TM мотора, которая является температурой электромотора 114 каждого колесного тормоза 100 электрического тормозного устройства 34. На основе определенных значений этих датчиков 134, 136, 138, 140, градиента ΔFHY изменения гидравлической тормозной силы, который является градиентом изменения требуемой гидравлической тормозной силы FHY*, и градиента ΔFEM изменения электрической тормозной силы, который является градиентом изменения требуемой электрической тормозной силы FEM*, оцениваются величина dFHY уменьшения гидравлической тормозной силы, которая является величиной уменьшения гидравлической тормозной силы FHY, и величина dFEM уменьшения электрической тормозной силы, которая является величиной уменьшения электрической тормозной силы FEM. Здесь, градиент ΔFHY изменения гидравлической тормозной силы может рассматриваться как скорость увеличения требуемой гидравлической тормозной силы FHY* в процессе ее увеличения, и градиент ΔFEM изменения электрической тормозной силы может рассматриваться как скорость увеличения требуемой электрической тормозной силы FEM* в процессе ее увеличения. Дополнительно, величина dFHY уменьшения гидравлической тормозной силы может рассматриваться как недостаточная величина относительно требуемой гидравлической тормозной силы FHY*, и величина dFEM уменьшения электрической тормозной силы может рассматриваться как недостаточная величина относительно требуемой электрической тормозной силы FEM*.
[0097] Как показано на графиках по фиг. 8, коэффициент CTE(TE) окружающей температуры, который использует окружающую температуру TE в качестве параметра, коэффициент CPA(PA) атмосферного давления, который использует атмосферное давление PA в качестве параметра, и коэффициент CΔFHY(ΔFHY) градиента изменения гидравлической тормозной силы, который использует градиент ΔFHY изменения гидравлической тормозной силы в качестве параметра, задаются в качестве данных в форме карты. Эти коэффициенты получаются с обращением к данным на основе определенной или полученной окружающей температуры TE, атмосферного давления PA и градиента ΔFHY изменения гидравлической тормозной силы. Коэффициент CTE(TE) окружающей температуры, коэффициент CPA(PA) атмосферного давления и коэффициент CΔFHY(ΔFHY) градиента изменения гидравлической тормозной силы умножаются на требуемую гидравлическую тормозную силу FHY*. Дополнительно, разность, полученная посредством вычитания такого полученного результата произведения из требуемой гидравлической тормозной силы FHY*, оценивается как величина dFHY уменьшения гидравлической тормозной силы. Как очевидно из фиг. 8, коэффициент CTE(TE) окружающей температуры задается равным значению, меньшему 1, когда окружающая температура TE ниже пороговой температуры TE0 (например, 5˚C), и коэффициент CPA(PA) атмосферного давления задается равным значению, меньшему 1, когда атмосферное давление PA ниже порогового давления PA0 (например, 1 гПа). Таким образом, когда окружающая температура TE ниже пороговой температуры TE0, и когда атмосферное давление PA ниже порогового давления PA0, в настоящей тормозной системе считается, что существуют факторы, обуславливающие уменьшение гидравлической тормозной силы FHY. Следует отметить, что для гидравлической тормозной силы FHY становится затруднительнее следование за увеличением требуемой гидравлической тормозной силы FHY* в качестве градиента ΔFHY изменения гидравлической тормозной силы становится большим. С учетом этого, коэффициент CΔFHY(ΔFHY) градиента изменения гидравлической тормозной силы задается равным значению, меньшему 1, когда он превышает пороговый градиент ΔFHY0.
[0098] Как показано на графиках по фиг. 9, коэффициент CTM(TM) температуры мотора, который использует температуру TM мотора в качестве параметра, коэффициент CVB(VB) напряжения аккумулятора, который использует напряжение VB аккумулятора в качестве параметра, и коэффициент CΔFEM(ΔFEM) градиента изменения электрической тормозной силы, который использует градиент ΔFEM изменения электрической тормозной силы в качестве параметра, задаются в качестве данных в форме карты. Эти коэффициенты получаются с обращением к данным на основе определенной или полученной температуры TM мотора, напряжения VB аккумулятора и градиента ΔFEM изменения электрической тормозной силы. Коэффициент CTM(TM) температуры мотора, коэффициент CVB(VB) напряжения аккумулятора и коэффициент CΔFEM(ΔFEM) градиента изменения электрической тормозной силы умножаются на требуемую электрическую тормозную силу FEM*. Дополнительно, разность, полученная посредством вычитания такого полученного результата произведения из требуемой электрической тормозной силы FEM*, оценивается как величина dFEM уменьшения электрической тормозной силы. Как очевидно из фиг. 9, коэффициент CTM(TM) температуры мотора задается равным значению, меньшему 1, когда температура TM мотора выше пороговой температуры TM0 (например, 50˚C), и коэффициент CVB(VB) напряжения аккумулятора задается равным значению, меньшему 1, когда напряжение VB аккумулятора ниже порогового напряжения VB0 (например, 11 В). Таким образом, когда температура TM мотора выше пороговой температуры TM0, и когда напряжение VB аккумулятора ниже порогового напряжения VB0, в настоящей тормозной системе считается, что существуют факторы, обуславливающие уменьшение электрической тормозной силы FEM. Следует отметить, что для электрической тормозной силы FEM становится затруднительнее следование за увеличением требуемой электрической тормозной силы FEM* в качестве градиента ΔFEM изменения электрической тормозной силы становится большим. С учетом этого, коэффициент CΔFEM(ΔFEM) градиента изменения электрической тормозной силы задается равным значению, меньшему 1, когда он превышает пороговый градиент ΔFEM0.
[0099] Требуемая электрическая тормозная сила FEM* и требуемая гидравлическая тормозная сила FHY*, соответственно, изменяются на основе такой оцененной величины dFHY уменьшения гидравлической тормозной силы и величины dFEM уменьшения электрической тормозной силы, так что требуемая электрическая тормозная сила FEM* и требуемая гидравлическая тормозная сила FHY* корректируются. Коррекция выполняется в выбранном одном из двух режимов, т.е. режима дополнения и режима равновесия.
[0100] В режиме дополнения, когда оценивается то, что гидравлическая тормозная сила FHY уменьшается, требуемая электрическая тормозная сила FEM* увеличивается на величину dFHY уменьшения гидравлической тормозной силы, как показано на фиг. 6B. Дополнительно, когда оценивается то, что электрическая тормозная сила FEM уменьшается, требуемая гидравлическая тормозная сила FHY* увеличивается на величину dFEM уменьшения электрической тормозной силы, как показано на фиг. 7B. В режиме дополнения, уменьшение гидравлической тормозной силы FHY и уменьшение электрической тормозной силы FEM дополняются, так что можно уменьшать или не допускать уменьшения полной тормозной силы FSUM вследствие уменьшений гидравлической тормозной силы FHY и электрической тормозной силы FEM.
[0101] В режиме равновесия, когда оценивается то, что гидравлическая тормозная сила FHY уменьшается, требуемая электрическая тормозная сила FEM* снижается на величину, соответствующую величине dFHY уменьшения гидравлической тормозной силы, как показано на фиг. 6C. В частности, результат произведения, который получается посредством умножения величины dFHY уменьшения гидравлической тормозной силы на отношение (βEM/βHY) коэффициента βEM распределения электрической тормозной силы относительно коэффициента βHY распределения гидравлической тормозной силы, вычитается из требуемой электрической тормозной силы FEM*. Когда оценивается то, что электрическая тормозная сила FEM уменьшается, требуемая гидравлическая тормозная сила FHY* снижается на величину, соответствующую величине dFEM уменьшения электрической тормозной силы, как показано на фиг. 7C. В частности, результат произведения, который получается посредством умножения величины dFEM уменьшения электрической тормозной силы на отношение (βHY/βEM) коэффициента βHY распределения гидравлической тормозной силы относительно коэффициента βEM распределения электрической тормозной силы, вычитается из требуемой гидравлической тормозной силы FHY*. В режиме равновесия, можно уменьшаться или не допускать изменения распределения тормозной силы F в переднее колесо 10F и заднее колесо 10R, за счет этого уменьшая или не допуская изменения ощущения от операции нажатия педали тормоза, испытываемого водителем.
[0102] В настоящей тормозной системе, оценивается то, что факторы, обуславливающие варьирования гидравлической тормозной силы FHY и электрической тормозной силы FEM существуют, без фактического определения варьирований, и электрическая тормозная сила FEM и гидравлическая тормозная сила FHY изменяются в соответствии со степенями факторов. Таким образом, настоящая тормозная система легко преодолевает варьирования гидравлической тормозной силы FHY и электрической тормозной силы FEM.
[0103] v) Последовательность операций управления
Настоящая тормозная система транспортного средства управляется таким образом, что компьютер ECU 130 многократно выполняет программу управления тормозной силой, показанную посредством блок-схемы последовательности операций способа по фиг. 10, с кратковременным шагом, например, от нескольких мкс до нескольких мс. Далее поясняется последовательность операций управления тормозной силой в настоящей тормозной системе на основе пояснения обработки согласно управляющей программе.
[0104] При обработке согласно программе управления тормозной силой, предварительная обработка первоначально выполнена на этапе 1. (В дальнейшем в этом документе, этап 1 сокращается как "S1", и другие этапы сокращаются аналогично). Предварительная обработка выполняется посредством выполнения вложенной процедуры для предварительной обработки, указываемой посредством блок-схемы последовательности операций способа по фиг. 11. В предварительной обработке, на S21 первоначально определяется то, какой из двух режимов выбирается относительно коррекции гидравлической тормозной силы FHY и электрической тормозной силы FEM. Хотя не проиллюстрировано, переключатель выбора режима, который должен управляться водителем, предусматривается на приборной панели транспортного средства. Определение на S21 выполняется на основе состояния переключателя. Когда режим дополнения выбирается, флаг M режима задается равным 0 на S22. Когда режим равновесия выбирается, флаг M режима задается равным 1 на S23. Затем, на S24, рабочая сила δ, которая прикладывается к педали 40 тормоза, получается на основе определенного значения датчика 132 рабочей силы. На S25-S29, скорость v движения транспортного средства получается на основе определенного значения датчика скорости транспортного средства 142 (фиг. 1), окружающая температура TE получается на основе определенного значения датчика 134 окружающей температуры, атмосферное давление PA получается на основе определенного значения датчика 136 атмосферного давления, температура TM мотора получается на основе определенного значения датчика 140 температуры мотора, и напряжение VB аккумулятора получается на основе определенного значения датчика 138 напряжения аккумулятора.
[0105] После того, как предварительная обработка выполнена, требуемая полная тормозная сила FSUM* определяется на S2 посредством умножения полученной рабочей силы δ на заданный коэффициент αF тормозной силы. Затем, на S3, требуемая рекуперативная тормозная сила FRG* определяется на основе определенной требуемой полной тормозной силы FSUM* до определения требуемой гидравлической тормозной силы FHY* и требуемой электрической тормозной силы FEM*. Обработка для определения требуемой рекуперативной тормозной силы FRG* выполняется посредством выполнения вложенной процедуры для определения требуемой рекуперативной тормозной силы, указываемой посредством блок-схемы последовательности операций способа по фиг. 12.
[0106] При обработке согласно вложенной процедуре для определения требуемой рекуперативной тормозной силы, на S31 первоначально определяется то, равна или меньше 0 либо нет определенная требуемая полная тормозная сила FSUM*. Состояние, в котором требуемая полная тормозная сила FSUM* равна 0, означает состояние, в котором не выполняется операция нажатия педали тормоза. Когда операция нажатия педали тормоза не выполняется, флаг неформирования рекуперативной тормозной силы S сбрасывается на S32. Флаг неформирования рекуперативной тормозной силы задается равным 1, когда рекуперативная тормозная сила FRG не должна формироваться.
[0107] После этого на S33 определяется то, начинается или нет операция нажатия педали тормоза. В частности, определяется то, что операция нажатия педали тормоза начинается, когда операция нажатия педали тормоза не выполняется до текущего выполнения программы, и операция нажатия педали тормоза выполняется посредством текущего выполнения программы. Когда определяется то, что операция нажатия педали тормоза начинается, на S34 определяется то, ниже или нет скорость v движения транспортного средства в настоящий момент пороговой скорости v0. Когда определяется то, что скорость v движения транспортного средства ниже пороговой скорости v0, флаг неформирования рекуперативной тормозной силы задается равным 1 на S35, и на S36 определяется то, что значение флага неформирования рекуперативной тормозной силы равно 1. Затем, на S37, требуемая рекуперативная тормозная сила FRG* определяется равной 0, и рекуперативная тормозная сила FRG управляется таким образом, что она не формируется в текущей последовательности операции нажатия педали тормоза. С другой стороны, когда определяется то, что скорость v движения транспортного средства равна или выше пороговой скорости v0, значение флага неформирования рекуперативной тормозной силы поддерживается равным 0, и соответствующая рекуперативная тормозная сила FRG формируется в текущей последовательности операции нажатия педали тормоза посредством обработки на S38 и следующих этапах.
[0108] Ниже поясняется обработка на S38 и следующих этапах. На S38, максимальная рекуперативная тормозная сила FRG-MAX, которая является рекуперативной тормозной силой FRG, которая может формироваться в настоящий момент, идентифицируется на основе состояния заряда (SOC) аккумулятора 28, скорости v движения транспортного средства и т.д. После этого на S39 определяется то, равна или меньше либо нет требуемая полная тормозная сила FSUM* максимальной рекуперативной тормозной силы FRG-MAX. Когда требуемая полная тормозная сила FSUM* равна или меньше максимальной рекуперативной тормозной силы FRG-MAX, требуемая полная тормозная сила FSUM* может покрываться посредством рекуперативной тормозной силы FRG. В этом случае, требуемая рекуперативная тормозная сила FRG* определяется равной требуемой полной тормозной силе FSUM* на S40. С другой стороны, когда требуемая полная тормозная сила FSUM* превышает максимальную рекуперативную тормозную силу FRG-MAX, требуемая рекуперативная тормозная сила FRG* определяется равной максимальной рекуперативной тормозной силе FRG-MAX на S41, с тем чтобы формировать рекуперативную тормозную силу FRG как можно большей.
[0109] Когда транспортное средство замедляется в качестве результата выполнения операции нажатия педали тормоза, и скорость v движения транспортного средства, соответственно, становится ниже пороговой скорости v0, выполняется обработка коррекции требуемой рекуперативной тормозной силы FRG* для замены рекуперативной тормозной силы FRG на гидравлическую тормозную силу FHY. При обработке коррекции, коэффициент CRG(v) скорости транспортного средства в соответствии со скоростью v движения транспортного средства идентифицируется с обращением к данным карты, показанным на S42 по фиг. 4. Затем, величина dFRG уменьшения рекуперативной тормозной силы определяется на S43 посредством умножения требуемой рекуперативной тормозной силы FRG* на коэффициент CRG(v) скорости транспортного средства. На S44, определенная величина dFRG уменьшения рекуперативной тормозной силы вычитается из требуемой рекуперативной тормозной силы FRG*, за счет чего корректируется требуемая рекуперативная тормозная сила FRG*.
[0110] После того, как требуемая рекуперативная тормозная сила FRG* определяется посредством обработки согласно вложенной процедуре для определения требуемой рекуперативной тормозной силы, недостаточная тормозная сила FIS определяется на S4 посредством вычитания требуемой рекуперативной тормозной силы FRG* из требуемой полной тормозной силы FSUM*. Затем, на S5, недостаточная тормозная сила FIS умножается на коэффициент βHY распределения гидравлической тормозной силы, и величина dFRG уменьшения рекуперативной тормозной силы суммируется с полученным результатом произведения, за счет чего определяется требуемая гидравлическая тормозная сила FHY*. Посредством умножения недостаточной тормозной силы FIS на коэффициент βEM распределения электрической тормозной силы требуемая электрическая тормозная сила FEM* определяется на S6.
[0111] На S7, с учетом уменьшения гидравлической тормозной силы FHY вследствие присутствия упомянутых выше факторов, величина dFHY уменьшения гидравлической тормозной силы оценивается как нехватка гидравлической тормозной силы FHY, которая должна фактически формироваться относительно требуемой гидравлической тормозной силы FHY*. Оценка выполняется посредством выполнения вложенной процедуры для оценки величины уменьшения гидравлической тормозной силы, указываемой посредством блок-схемы последовательности операций способа по фиг. 13A. При обработке согласно вложенной процедуре, градиент ΔFHY изменения гидравлической тормозной силы первоначально получается на S51 на основе разности между требуемой гидравлической тормозной силой FHY* при предыдущем выполнении программы (т.е. требуемой гидравлической тормозной силой FHY*, определенной на S5 при предыдущем выполнении) и требуемой гидравлической тормозной силой FHY* при текущем выполнении программы. На S52-S54, коэффициент CTE(TE) окружающей температуры, коэффициент CPA(PA) атмосферного давления и коэффициент CΔFHY(ΔFHY) градиента изменения гидравлической тормозной силы идентифицируются, соответственно, на основе окружающей температуры TE, атмосферного давления PA и градиента ΔFHY изменения гидравлической тормозной силы посредством обращения к данным карты, показанным на фиг. 8. На S55, величина dFHY уменьшения гидравлической тормозной силы оценивается следующим образом. Идентифицированный коэффициент CTE(TE) окружающей температуры, коэффициент CPA(PA) атмосферного давления и коэффициент CΔFHY(ΔFHY) градиента изменения гидравлической тормозной силы умножаются на требуемую гидравлическую тормозную силу FHY*, и результат произведения вычитается из требуемой гидравлической тормозной силы FHY*. Таким образом, величина dFHY уменьшения гидравлической тормозной силы оценивается.
[0112] На S8, с учетом уменьшения электрической тормозной силы FEM вследствие присутствия упомянутых выше факторов, величина dFEM уменьшения электрической тормозной силы оценивается как нехватка электрической тормозной силы FEM, которая должна фактически формироваться относительно требуемой электрической тормозной силы FEM*. Оценка выполняется посредством выполнения вложенной процедуры для оценки величины уменьшения электрической тормозной силы, указываемой посредством блок-схемы последовательности операций способа по фиг. 13B. При обработке согласно вложенной процедуре, градиент ΔFEM изменения электрической тормозной силы первоначально получается на S61 на основе разности между требуемой электрической тормозной силой FEM* при предыдущем выполнении программы (т.е. требуемой электрической тормозной силой FEM*, определенной на S6 при предыдущем выполнении) и требуемой электрической тормозной силой FEM* при текущем выполнении программы. На S62-S64, коэффициент CTM(TM) температуры мотора, коэффициент CVB(VB) напряжения аккумулятора и коэффициент CΔFEM(ΔFEM) градиента изменения электрической тормозной силы идентифицируются, соответственно, на основе температуры TM мотора, напряжения VB аккумулятора и градиента ΔFEM изменения электрической тормозной силы посредством обращения к данным карты, показанным на фиг. 9. На S65 величина dFEM уменьшения электрической тормозной силы оценивается следующим образом. Идентифицированный коэффициент CTM(TM) температуры мотора, коэффициент CVB(VB) напряжения аккумулятора и коэффициент CΔFEM(ΔFEM) градиента изменения электрической тормозной силы умножаются на требуемую электрическую тормозную силу FEM*, и результат произведения вычитается из требуемой электрической тормозной силы FEM*. Таким образом, величина dFEM уменьшения электрической тормозной силы оценивается.
[0113] Возвращаясь к блок-схеме последовательности операций способа по фиг. 10, на S9 определяется то, равен или нет флаг M режима 1, а именно, представляет текущий выбранный режим собой режим дополнения или режим равновесия. Когда режим дополнения выбирается, величина dFEM уменьшения электрической тормозной силы суммируется с требуемой гидравлической тормозной силой FHY* на S10, и величина dFHY уменьшения гидравлической тормозной силы суммируется с требуемой электрической тормозной силой FEM* на S11. Таким образом, требуемая гидравлическая тормозная сила FHY* и требуемая электрическая тормозная сила FEM* корректируются. С другой стороны, когда режим равновесия выбирается, результат произведения: величины dFEM уменьшения электрической тормозной силы; и отношения βHY/βEM (которое является отношением коэффициента βH распределения гидравлической тормозной силы к коэффициенту βEM распределения электрической тормозной силы) вычитается из требуемой гидравлической тормозной силы FHY* на S12. Дополнительно, результат произведения: величины dFHY уменьшения гидравлической тормозной силы; и отношения βEM/βHY (которое является отношением коэффициента βEM распределения электрической тормозной силы к коэффициенту βHY распределения гидравлической тормозной силы) вычитается из требуемой электрической тормозной силы FEM* на S13. Таким образом, требуемая гидравлическая тормозная сила FHY* и требуемая электрическая тормозная сила FEM* корректируются.
[0114] После этого, на S14, управляющая команда на основе такой определенной и скорректированной требуемой рекуперативной тормозной силы FRG*, требуемой гидравлической тормозной силы FHY* и требуемой электрической тормозной силы FEM* выдается в рекуперативное тормозное устройство 30, гидравлическое тормозное устройство 32 и электрическое тормозное устройство 34. Таким образом, последовательность обработки согласно программе завершается.
Вариант 2 осуществления
[0115] A. Конструкция тормозной системы транспортного средства
Как показано на фиг. 14, транспортное средство, на котором устанавливается тормозная система согласно второму варианту осуществления, не представляет собой гибридное транспортное средство. Приводная система транспортного средства, установленная на транспортном средстве второго варианта осуществления, включает в себя двигатель 12 в качестве источника приведения в движение, трансмиссионный механизм 150, дифференциальный механизм 22 и ведущие валы 24L, 24R и выполнена с возможностью приводить в действие правое и левое передние колеса 10F. Настоящая тормозная система включает в себя гидравлическое тормозное устройство 32 и электрическое тормозное устройство 34 без включения рекуперативного тормозного устройства. В нижеприведенном пояснении, ссылки с номерами, идентичные ссылкам с номерами, используемым в первом варианте осуществления, используются для того, чтобы идентифицировать устройства и составляющие компоненты второго варианта осуществления, имеющие функции, идентичные функциям устройств и составляющих компонентов первого варианта осуществления, и их подробное пояснение опускается. Тормозная система транспортного средства согласно этому второму варианту осуществления также пользуется преимуществом уменьшения размера гидравлического тормозного устройства 32 и тормозной системы транспортного средства, как указано в проиллюстрированном первом варианте осуществления.
[0116] Гидравлическое тормозное устройство 32 и электрическое тормозное устройство 34 второго варианта осуществления почти являются идентичными по конструкции гидравлическому тормозному устройству и электрическому тормозному устройству тормозной системы транспортного средства первого варианта осуществления. В тормозной системе второго варианта осуществления, гидравлическое тормозное устройство 32 выполнено с возможностью предоставлять гидравлическую тормозную силу переднему колесу 10F, и электрическое тормозное устройство 34 выполнено с возможностью предоставлять электрическую тормозную силу заднему колесу 10R.
[0117] B. Управление тормозной системой транспортного средства
i) Краткий обзор управления
Управление тормозной силой F в настоящей тормозной системе, а именно, управление гидравлической тормозной силой FHY и электрической тормозной силой FEM, выполняется посредством ECU 130. В нижеприведенном пояснении, обработка, которая является идентичной обработке при управлении тормозной системой транспортного средства первого варианта осуществления, не поясняется.
[0118] При управлении настоящей тормозной системой, требуемая полная тормозная сила FSUM* определяется посредством умножения рабочей силы δ, определенной посредством датчика 132 рабочей силы, на коэффициент αF тормозной силы. Определенная требуемая полная тормозная сила FSUM* распределена на требуемую гидравлическую тормозную силу FHY* и требуемую электрическую тормозную силу FEM*. Распределение выполняется на основе коэффициента распределения (βHY:βEM) на основе коэффициента βHY распределения гидравлической тормозной силы и коэффициента βEM распределения электрической тормозной силы.
[0119] Как пояснено выше, гидравлическая тормозная сила и электрическая тормозная сила могут варьироваться или колебаться вследствие среды, в которой размещено транспортное средство, и состояния составляющих компонентов гидравлического тормозного устройства 32 и электрического тормозного устройства 34. В тормозной системе транспортного средства первого варианта осуществления, оценивается присутствие факторов, обуславливающих варьирование, и варьирование одной из гидравлической тормозной силы FHY и электрической тормозной силы FEM преодолевается посредством изменения другой из гидравлической тормозной силы FHY и электрической тормозной силы FEM в соответствии со степенью факторов. В тормозной системе второго варианта осуществления, варьирование одной из гидравлической тормозной силы FHY и электрической тормозной силы FEM преодолевается на основе фактически определенной тормозной силы F. Следовательно, в настоящей тормозной системе можно надлежащим образом преодолевать варьирование на основе идентификации уменьшения фактической тормозной силы, а не на основе оценки, другими словами, независимо от присутствия факторов, обуславливающих варьирование.
[0120] В частности, уменьшение гидравлической тормозной силы FHY идентифицируется следующим образом. Фактическая гидравлическая тормозная сила FHY получается на основе давления PW в колесном тормозном цилиндре, которое является давлением рабочей жидкости, поданной в колесный тормозной цилиндр 84 колесного тормоза 46. Когда разность δFHY гидравлических тормозных сил, которая является разностью между гидравлической тормозной силой FHY и требуемой гидравлической тормозной силой FHY*, превышает пороговую разность δFHY-TH в процессе увеличения требуемой полной тормозной силы FSUM*, идентифицируется то, что гидравлическая тормозная сила FHY меньше требуемой гидравлической тормозной силы FHY* вследствие задержки увеличения гидравлической тормозной силы FHY.
[0121] Аналогично, уменьшение электрической тормозной силы FEM идентифицируется следующим образом. Фактическая электрическая тормозная сила FEM получается на основе толкающей нагрузки W, которая прикладывается к дисковому ротору 102 посредством тормозной колодки 120 колесного тормоза 100. Когда разность δFEM электрических тормозных сил, которая является разностью между электрической тормозной силой FEM и требуемой электрической тормозной силой FEM*, превышает пороговую разность δFEM-TH в процессе увеличения требуемой полной тормозной силы FSUM*, идентифицируется то, что электрическая тормозная сила FEM меньше требуемой электрической тормозной силы FEM* вследствие задержки увеличения электрической тормозной силы FEM.
[0122] Аналогично тормозной системе транспортного средства первого варианта осуществления, уменьшение гидравлической тормозной силы FHY и уменьшение электрической тормозной силы FEM преодолеваются по-разному между режимом дополнения и режимом равновесия. В режиме дополнения, уменьшение гидравлической тормозной силы FHY преодолевается посредством суммирования разности δFHY гидравлических тормозных сил с требуемой электрической тормозной силой FEM*, за счет чего корректируется требуемая гидравлическая тормозная сила FHY*. В режиме равновесия, результат произведения: отношения βEM/βHY (которое является отношением коэффициента βEM распределения электрической тормозной силы к коэффициенту βHY распределения гидравлической тормозной силы); и разности δFHY гидравлических тормозных сил вычитается из требуемой электрической тормозной силы FEM*, за счет чего корректируется требуемая гидравлическая тормозная сила FHY*. Аналогично, в режиме дополнения, уменьшение электрической тормозной силы FEM преодолевается посредством суммирования разности δFEM электрических тормозных сил с требуемой гидравлической тормозной силой FHY*, за счет чего корректируется требуемая электрическая тормозная сила FEM*. В режиме равновесия, результат произведения: отношения βHY/βEM (которое является отношением коэффициента βHY распределения гидравлической тормозной силы к коэффициенту βEM распределения электрической тормозной силы); и разности δFEM электрических тормозных сил вычитается из требуемой гидравлической тормозной силы FHY*, за счет чего корректируется требуемая электрическая тормозная сила FEM*.
[0123] Когда уменьшение гидравлической тормозной силы FHY, показанной на фиг. 15A, идентифицируется согласно обработке, описанной выше, электрическая тормозная сила FEM увеличивается, как показано на фиг. 15B в режиме дополнения, в то время как электрическая тормозная сила FEM снижается, как показано на фиг. 15C в режиме равновесия. Когда уменьшение электрической тормозной силы FEM, показанной на фиг. 16A, идентифицируется согласно обработке, описанной выше, гидравлическая тормозная сила FHY увеличивается, как показано на фиг. 16B в режиме дополнения, в то время как гидравлическая тормозная сила FHY снижается, как показано на фиг. 16C в режиме равновесия.
[0124] iii) Последовательность операций управления
Управление настоящей тормозной системой транспортного средства выполняется таким образом, что компьютер ECU 130 многократно выполняет программу управления тормозной силой, указываемую посредством блок-схемы последовательности операций способа по фиг. 17, с кратковременным шагом, например, от нескольких мкс до нескольких мс. Далее поясняется последовательность операций управления тормозной силой в настоящей тормозной системе на основе пояснения обработки согласно управляющей программе. Ниже кратко поясняются части обработки в тормозной системе транспортного средства второго варианта осуществления, которые являются идентичными частям обработки в тормозной системе транспортного средства первого варианта осуществления.
[0125] При обработке согласно программе управления тормозной силой, рабочая сила δ получается на S101, и требуемая полная тормозная сила FSUM* определяется на S102 посредством умножения рабочей силы δ на коэффициент αF тормозной силы. Затем, на S103, требуемая гидравлическая тормозная сила FHY* определяется посредством умножения требуемой полной тормозной силы FSUM* на коэффициент βHY распределения гидравлической тормозной силы, и требуемая электрическая тормозная сила FEM* определяется посредством умножения требуемой полной тормозной силы FSUM* на коэффициент βEM распределения электрической тормозной силы.
[0126] Затем на S104 определяется то, находится или нет требуемая полная тормозная сила FSUM* в процессе увеличения, на основе требуемой полной тормозной силы FSUM* при предыдущем выполнении программы и требуемой полной тормозной силы FSUM* при текущем выполнении программы. Когда требуемая полная тормозная сила FSUM* находится в процессе увеличения, реализуются S105 и следующие этапы, чтобы преодолевать уменьшение гидравлической тормозной силы FHY и уменьшение электрической тормозной силы FEM.
[0127] На S105, фактическая гидравлическая тормозная сила FHY основана на давлении PW в колесном тормозном цилиндре, и фактическая электрическая тормозная сила FEM получается на основе толкающей нагрузки W тормозной колодки 120. На S106, полученная фактическая гидравлическая тормозная сила FHY вычитается из требуемой гидравлической тормозной силы FHY*, и полученная фактическая электрическая тормозная сила FEM вычитается из требуемой электрической тормозной силы FEM*, за счет чего получаются разность δFHY гидравлических тормозных сил и разность δFEM электрических тормозных сил.
[0128] После этого на S107 определяется то, представляет режим для преодоления уменьшения гидравлической тормозной силы FHY и уменьшения электрической тормозной силы FEM собой режим дополнения или режим равновесия. Когда режим представляет собой режим дополнения, реализуются S108-S111. Когда режим представляет собой режим равновесия, реализуются S112-S115.
[0129] В режиме дополнения, на S108 определяется то, превышает или нет разность δFHY гидравлических тормозных сил пороговую разность δFHY-TH. Когда разность δFHY гидравлических тормозных сил превышает пороговую разность δFHY-TH, последовательность операций управления переходит на S109, чтобы суммировать разность δFHY гидравлических тормозных сил с требуемой электрической тормозной силой FEM*, за счет чего корректируется требуемая электрическая тормозная сила FEM*. На S110, определяется то, превышает или нет разность δFEM электрических тормозных сил пороговую разность δFEM-TH. Когда разность δFEM электрических тормозных сил превышает пороговую разность δFEM-TH, последовательность операций управления переходит на S111, чтобы суммировать разность δFEM электрических тормозных сил с требуемой гидравлической тормозной силой FHY*, за счет чего корректируется требуемая гидравлическая тормозная сила FHY*. В режиме равновесия, на S112 определяется то, превышает или нет разность δFHY гидравлических тормозных сил пороговую разность δFHY-TH. Когда разность δFHY гидравлических тормозных сил превышает пороговую разность δFHY-TH, последовательность операций управления переходит на S113, на котором результат произведения: отношения βEM/βHY (которое является отношением коэффициента βEM распределения электрической тормозной силы к коэффициенту βHY распределения гидравлической тормозной силы); и разности δFHY гидравлических тормозных сил вычитается из требуемой электрической тормозной силы FEM*, за счет чего корректируется требуемая электрическая тормозная сила FEM*. На S114, определяется то, превышает или нет разность δFEM электрических тормозных сил пороговую разность δFEM-TH. Когда разность δFEM электрических тормозных сил превышает пороговую разность δFEM-TH, последовательность операций управления переходит на S115, на котором результат произведения: отношения βHY/βEM (которое является отношением коэффициента βHY распределения гидравлической тормозной силы к коэффициенту βEM распределения электрической тормозной силы); и разности δFEM электрических тормозных сил вычитается из требуемой гидравлической тормозной силы FHY*, за счет чего корректируется требуемая гидравлическая тормозная сила FHY*.
[0130] На S116, управляющая команда на основе такой определенной и скорректированной требуемой гидравлической тормозной силы FHY* и требуемой электрической тормозной силы FEM* выдается в гидравлическое тормозное устройство 32 и электрическое тормозное устройство 34. Таким образом, последовательность обработки согласно программе завершается.
Вариант 3 осуществления
[0131] A. Краткий обзор приводной системы транспортного средства и тормозной системы транспортного средства
Как схематично показано на фиг. 18, транспортное средство, на котором устанавливается тормозная система транспортного средства согласно третьему варианту осуществления (в дальнейшем называемое "транспортным средством третьего варианта осуществления" при необходимости), представляет собой гибридное транспортное средство, такое как транспортное средство, на котором устанавливается тормозная система транспортного средства согласно первому варианту осуществления (в дальнейшем называемое "транспортным средством первого варианта осуществления"). Приводная система транспортного средства согласно третьему варианту осуществления является практически аналогичной приводной системе транспортного средства первого варианта осуществления. В нижеприведенном пояснении, ссылки с номерами, идентичные ссылкам с номерами, используемым в первом варианте осуществления, используются для того, чтобы идентифицировать составляющие компоненты третьего варианта осуществления, имеющие функции, идентичные функциям составляющих компонентов первого варианта осуществления, и их подробное пояснение опускается. В отличие от управления в приводной системе транспортного средства, установленной на транспортном средстве первого варианта осуществления, управление в приводной системе транспортного средства, установленной на транспортном средстве третьего варианта осуществления, выполняется посредством монопольного гибридного электронного модуля 160 управления (в дальнейшем называемого "HB-ECU" при необходимости). В частности, HB-ECU 160 включает в себя компьютер и схемы приведения в действие (средства приведения в действие) для компонентов приводной системы транспортного средства, которые должны управляться. HB-ECU 160 управляет, например, величиной заряда аккумулятора 28 и управляет инвертором 26M, инвертором 26G.
[0132] Как схематично показано на фиг. 18, тормозная система транспортного средства настоящего варианта осуществления включает в себя (a) рекуперативное тормозное устройство 30, выполненное с возможностью предоставлять тормозную силу каждому из двух передних колес 10F, (b) гидравлическое тормозное устройство 32, выполненное с возможностью предоставлять тормозную силу каждому из двух передних колес 10F, независимо от тормозной силы, предоставляемой посредством рекуперативного тормозного устройства 30, и (c) электрическое тормозное устройство 34, выполненное с возможностью предоставлять тормозную силу каждому из двух задних колес 10R. Таким образом, в отличие от тормозной системы транспортного средства первого варианта осуществления, в котором гидравлическое тормозное устройство 32 предусматривается для задних колес 10R, а электрическое тормозное устройство 34 предусматривается для передних колес 10F, гидравлическое тормозное устройство 32 предусматривается для передних колес 10F, а электрическое тормозное устройство 34 предусматривается для задних колес 10R в тормозной системе транспортного средства третьего варианта осуществления, аналогично тормозной системе транспортного средства второго варианта осуществления.
[0133] B. Рекуперативное тормозное устройство
Рекуперативное тормозное устройство 30 тормозной системы транспортного средства настоящего варианта осуществления является практически аналогичным по конструкции рекуперативному тормозному устройству 30 тормозной системы транспортного средства первого варианта осуществления. Тем не менее, рекуперативная тормозная сила управляется посредством HB-ECU 160.
[0134] C. Гидравлическое тормозное устройство
Гидравлическое тормозное устройство 32 тормозной системы транспортного средства настоящего варианта осуществления (в дальнейшем называемое "гидравлическим тормозным устройством 32 настоящего варианта осуществления) является практически аналогичным по конструкции и функции гидравлическому тормозному устройству 32 тормозной системы транспортного средства первого варианта осуществления (в дальнейшем называемому "гидравлическим тормозным устройством 32 первого варианта осуществления"), за исключением колес, которым предоставляется гидравлическая тормозная сила. Модуль 44 исполнительного устройства немного отличается между гидравлическим тормозным устройством 32 настоящего варианта осуществления и гидравлическим тормозным устройством 32 первого варианта осуществления. В частности, как показано на фиг. 19, контрольные клапаны 162 предусматриваются в модуле 44 исполнительного устройства гидравлического тормозного устройства 32 настоящего варианта осуществления вместо буферов 70, предусмотренных в модуле 44 исполнительного устройства (фиг. 2) гидравлического тормозного устройства 32 первого варианта осуществления. Дополнительно, контрольные клапаны 68, предусмотренные в модуле 44 исполнительного устройства гидравлического тормозного устройства 32 первого варианта осуществления, опускаются в модуле 44 исполнительного устройства гидравлического тормозного устройства 32 настоящего варианта осуществления. Также в тормозной системе транспортного средства настоящего варианта осуществления, можно пользоваться преимуществом уменьшения размера гидравлического тормозного устройства.
[0135] D. Электрическое тормозное устройство
Электрическое тормозное устройство 34 тормозной системы транспортного средства настоящего варианта осуществления является практически аналогичным по конструкции и функции электрическому тормозному устройству 34 тормозной системы транспортного средства первого варианта осуществления, за исключением колес, которым предусматривается электрическая тормозная сила.
[0136] E. Управление тормозной системой транспортного средства
i) Система управления
Управление тормозной системой транспортного средства настоящего варианта осуществления, а именно, управление тормозной силой F, выполняется посредством системы управления, показанной на фиг. 18. В частности, гидравлическое тормозное устройство 32 управляется посредством электронного модуля 164 управления для гидравлического тормозного устройства (в дальнейшем называемого "HY-ECU"). Электрическое тормозное устройство 34 управляется посредством электронных модулей 166 управления, предусматриваемых для соответствующих колесных тормозов 100 (в дальнейшем называемых "EM-ECU"). HY-ECU 164 включает в себя компьютер и средства приведения в действие (схемы приведения в действие) для компонентов гидравлического тормозного устройства 32. EM-ECU 166 включает в себя компьютер и средства приведения в действие (схемы приведения в действие) для компонентов электрического тормозного устройства 34. Как пояснено выше, рекуперативное тормозное устройство 30 управляется посредством HB-ECU 160.
[0137] В частности, HB-ECU 160 управляет инверторами 26G, 26M, которые составляют рекуперативное тормозное устройство 30, HY-ECU 164 управляет клапанами 64 поддержания давления модуля 44 исполнительного устройства, который составляет гидравлическое тормозное устройство 32, и EM-ECU 166, соответственно, управляют электромоторами 114 соответствующих колесных тормозов 100, которые составляют электрическое тормозное устройство 34, за счет этого управляя рекуперативной тормозной силой FRG, гидравлической тормозной силой FHY и электрической тормозной силой FEM. Следовательно, полная тормозная сила FSUM, которая является тормозной силой F, которая должна предоставляться в транспортное средство в целом, управляется. В тормозной системе транспортного средства, HB-ECU 160, HY-ECU 164 и EM-ECU 166 соединяются между собой посредством сети в транспортном средстве (CAN) и выполняют соответствующие виды управления при осуществлении связи между собой. Как пояснено ниже, HY-ECU 164 выступает, в настоящей тормозной системе транспортного средства, в качестве основного электронного модуля управления, который также управляет HB-ECU 160 и EM-ECU 166. Можно считать, что один контроллер состоит из HB-ECU 160, HY-ECU 164 и EM-ECU 166.
[0138] ii) Базовое управление тормозной силой
Базовое управление тормозной силой в настоящей тормозной системе транспортного средства выполняется концептуально, как показано на блок-схеме последовательности операций способа по фиг. 20. Далее поясняется базовое управление тормозной силой на основе блок-схемы последовательности операций способа. Обработка на основе блок-схемы последовательности операций способа многократно выполняется с кратковременным шагом, например, примерно в несколько мс.
[0139] На этапе 201 первоначально определяется требуемая полная тормозная сила FSUM*, которая является тормозной силой F, требуемой для транспортного средства в целом, т.е. суммой тормозных сил F, которые должны предоставляться в четыре колеса 10, на основе операции нажатия педали 40 тормоза. (В дальнейшем в этом документе, этап 201 сокращается как "S201", и другие этапы сокращаются аналогично). В частности, педаль 40 тормоза содержит датчик 168 рабочего хода для определения рабочего хода St в качестве рабочей величины нажатия педали тормоза 40, как показано на фиг. 18 и 19. HY-ECU 164 получает требуемую полную тормозную силу FSUM* посредством умножения рабочего хода St, определенного посредством датчика 168 рабочего хода, на коэффициент αF тормозной силы. Рабочий ход St является одним примером рабочего значения, указывающего степень операции нажатия педали 40 тормоза, а именно, указывающего степень операции нажатия педали тормоза, и может рассматриваться как параметр, указывающий требуемую полную тормозную силу FSUM*.
[0140] В настоящей тормозной системе транспортного средства, предпочтительно формируется рекуперативная тормозная сила FRG, и гидравлическая тормозная сила FHY и электрическая тормозная сила FEM покрывают нехватку в требуемой полной тормозной силе FSUM*, которая не может покрываться посредством рекуперативной тормозной силы FRG. Нехватка называется "недостаточной тормозной силой FIS".
[0141] Чтобы достигать вышеуказанного, сигнал, связанный с требуемой полной тормозной силой FSUM*, передается из HY-ECU 164 в HB-ECU 160. На S202, HB-ECU 160 определяет требуемую рекуперативную тормозную силу FRG* (целевую рекуперативную тормозную силу) в качестве максимальной рекуперативной тормозной силы FRG, которая может формироваться в диапазоне, не превышающем требуемую полную тормозную силу FSUM*. Сигнал, связанный с требуемой рекуперативной тормозной силой FRG*, возвращается из HB-ECU 160 в HY-ECU 164.
[0142] На S203, HY-ECU 164 определяет недостаточную тормозную силу FIS посредством вычитания требуемой рекуперативной тормозной силы FRG* из требуемой полной тормозной силы FSUM*. Недостаточная тормозная сила FIS покрывается посредством гидравлической тормозной силы FHY и электрической тормозной силы FEM таким образом, что гидравлическая тормозная сила FHY и электрическая тормозная сила FEM удовлетворяют заданному коэффициенту распределения (βHY:βEM). В частности, на S204, HY-ECU 164, соответственно, умножает недостаточную тормозную силу FIS на коэффициент βHY распределения гидравлической тормозной силы и коэффициент βEM распределения электрической тормозной силы (βHY+βEM=1), с тем чтобы определять требуемую гидравлическую тормозную силу FHY* (целевую гидравлическую тормозную силу) в качестве гидравлической тормозной силы FHY, которая должна формироваться, и требуемую электрическую тормозную силу FEM* (целевую электрическую тормозную силу) в качестве электрической тормозной силы FEM, которая должна формироваться. Сигнал, связанный с целевой электрической тормозной силой FEM*, передается из HY-ECU 164 в EM-ECU 166.
[0143] На S205, рекуперативное тормозное устройство 30, гидравлическое тормозное устройство 32 и электрическое тормозное устройство 34 управляются, соответственно, на основе требуемой рекуперативной тормозной силы FRG*, требуемой гидравлической тормозной силы FHY* и требуемой электрической тормозной силы FEM*, определенных так, как описано выше. В частности, HB-ECU 160 управляет инвертором 26M таким образом, что рекуперативная тормозная сила FRG становится равной требуемой рекуперативной тормозной силе FRG*. HY-ECU 164 управляет электрическими токами, которые должны подаваться в мотор 62 и клапаны 64 поддержания давления, таким образом, что гидравлическая тормозная сила FHY становится равной требуемой гидравлической тормозной силе FHY*. EM-ECU 166 управляют электрическим током, которые должен подаваться в электромоторы 114, таким образом, что электрическая тормозная сила FEM становится равной требуемой электрической тормозной силе FEM*.
[0144] Согласно управлению, описанному выше, рекуперативная тормозная сила, гидравлическая тормозная сила и электрическая тормозная сила управляются таким образом, что они взаимодействуют между собой. В частности, рекуперативная тормозная сила, гидравлическая тормозная сила и электрическая тормозная сила совместно управляются таким образом, что гидравлическая тормозная сила и электрическая тормозная сила покрывают нехватку в требуемой полной тормозной силе, которая не может покрываться посредством рекуперативной тормозной силы, т.е. недостаточную тормозную силу. Совместное управление предусматривает возможность простого получения необходимой требуемой полной тормозной силы, даже если рекуперативная тормозная сила варьируется, например, вследствие варьирования скорости движения транспортного средства или варьирования состояния заряда (SOC) аккумулятора 28. Дополнительно, гидравлическая тормозная сила и электрическая тормозная сила совместно управляются таким образом, что гидравлическая тормозная сила и электрическая тормозная сила формируются при заданном коэффициенте распределения (βHY:βEM). Совместное управление предусматривает возможность управления двумя тормозными силами согласно простому правилу управления, за счет чего в целом может легко управляться соответствующая тормозная сила, требуемая для транспортного средства.
Модификации
[0145] В тормозной системе транспортного средства первого варианта осуществления, электрическая тормозная сила предоставляется одному из переднего колеса 10F и заднего колеса 10R, которому предоставляется рекуперативная тормозная сила, и гидравлическая тормозная сила предоставляется другому из переднего колеса 10F и заднего колеса 10R, которому не предоставляется рекуперативная тормозная сила. В тормозной системе транспортного средства третьего варианта осуществления, электрическая тормозная сила предоставляется одному из переднего колеса 10F и заднего колеса 10R, которому не предоставляется рекуперативная тормозная сила, и гидравлическая тормозная сила предоставляется другому из переднего колеса 10F и заднего колеса 10R, которому предоставляется рекуперативная тормозная сила. В случае, в котором тормозная система транспортного средства включает в себя рекуперативное тормозное устройство, определение в отношении того, какая из гидравлической тормозной силы и электрической тормозной силы прикладывается к колесу, которому предоставляется рекуперативная тормозная сила, может выполняться в соответствии с общим принципом проектирования тормозной системы транспортного средства. Тормозная система первого варианта осуществления устанавливается на транспортном средстве с приводом на передние колеса. Тормозная система может устанавливаться на транспортных средствах с приводом на задние колеса или транспортных средствах с приводом на четыре колеса. В тормозной системе транспортного средства первого варианта осуществления, когда скорость движения транспортного средства становится ниже пороговой скорости как результат замедления транспортного средства, выполняется операция переключения, в которой рекуперативная тормозная сила постепенно уменьшается, а гидравлическая тормозная сила постепенно увеличивается. Операция переключения может модифицироваться таким образом, что электрическая тормозная сила постепенно увеличивается с постепенным уменьшением рекуперативной тормозной силы.
[0146] В тормозной системе транспортного средства второго варианта осуществления, гидравлическая тормозная сила предоставляется ведущему колесу, а электрическая тормозная сила предоставляется неведущему колесу. Электрическая тормозная сила может предоставляться ведущему колесу, а гидравлическая тормозная сила может предоставляться неведущему колесу. Тормозная система каждого из первого-третьего вариантов осуществления устанавливается на транспортном средстве с приводом на передние колеса. Тормозная система каждого из первого-третьего вариантов осуществления может устанавливаться на транспортных средствах с приводом на задние колеса или транспортных средствах с приводом на четыре колеса. В тормозной системе транспортного средства каждого из первого варианта осуществления и третьего варианта осуществления, рекуперативное тормозное устройство предусматривается для передних колес 10F. Можно конструировать тормозную систему транспортного средства, в которой рекуперативное тормозное устройство предусматривается для задних колес 10R.
[0147] С точки зрения идентификации варьирования одной из гидравлической тормозной силы и электрической тормозной силы, принцип управления тормозной силой тормозной системы транспортного средства второго варианта осуществления может использоваться в тормозной системе транспортного средства первого варианта осуществления. Другими словами, тормозная система, оснащенная рекуперативным тормозным устройством, может быть выполнена с возможностью: идентифицировать варьирование одной из гидравлической тормозной силы и электрической тормозной силы на основе определения фактической тормозной силы; и изменять другую из гидравлической тормозной силы и электрической тормозной силы. В этом случае, S104-S115 в программе управления тормозной силой (фиг. 17), выполняемой в тормозной системе транспортного средства второго варианта осуществления, заменены на S7-S13 в программе управления тормозной силой (фиг. 10), выполняемой в тормозной системе транспортного средства первого варианта осуществления.
[0148] Аналогично, принцип управления тормозной силой тормозной системы транспортного средства первого варианта осуществления может использоваться в тормозной системе транспортного средства второго варианта осуществления. Другими словами, тормозная система, не оснащенная рекуперативным тормозным устройством, может быть выполнена с возможностью: оценивать то, что транспортное средство находится в ситуации, в которой одна из гидравлической тормозной силы и электрической тормозной силы уменьшается, на основе, по меньшей мере, одного из среды, в которой размещено транспортное средство, и состояния составляющего компонента тормозной системы транспортного средства; и изменять другую из гидравлической тормозной силы и электрической тормозной силы на основе оценки. В этом случае, программа управления тормозной силой (фиг. 10), выполняемая в тормозной системе транспортного средства первого варианта осуществления, выполняется таким образом, что требуемая рекуперативная тормозная сила FRG* трактуется как равная 0.
[0149] В тормозной системе транспортного средства первого варианта осуществления, выполняется операция переключения, в которой гидравлическая тормозная сила увеличивается, в то время как рекуперативная тормозная сила снижается. Операция переключения может модифицироваться таким образом, что электрическая тормозная сила увеличивается, в то время как рекуперативная тормозная сила снижается.
[0150] В тормозной системе транспортного средства каждого из первого варианта осуществления и второго варианта осуществления, тормозное устройство, выполненное с возможностью электронно управлять гидравлической тормозной силой, используется в качестве гидравлического тормозного устройства. Может использоваться гидравлическое тормозное устройство, выполненное с возможностью неэлектронно управлять гидравлической тормозной силой, к примеру, гидравлическое тормозное устройство, оснащенное усилителем за счет отрицательного давления. В этом случае, хотя варьирование электрической тормозной силы не может преодолеваться посредством изменения гидравлической тормозной силы, варьирование гидравлической тормозной силы может преодолеваться посредством изменения электрической тормозной силы.
[0151] Только один ECU 130 может управлять соответствующими тормозными силами F, аналогично тормозной системе первого варианта осуществления. Альтернативно, множество ECU, соответственно, могут управлять множеством тормозных сил F при осуществлении связи между собой, аналогично тормозной системе третьего варианта осуществления.
[0152] В тормозной системе каждого из проиллюстрированных вариантов осуществления, электрический ток подается из вспомогательного аккумулятора 124 в каждый из колесных тормозов 100, которые составляют электрическое тормозное устройство 34. Электрический ток может подаваться из аккумулятора 28 приводной системы транспортного средства.
[0153] В качестве одного примера рабочего значения, указывающего степень операции нажатия педали 40 тормоза (которая представляет собой рабочий тормозной элемент), а именно, указывающего степень операции нажатия педали тормоза, рабочая тормозная сила δ используется в тормозной системе транспортного средства первого варианта осуществления, и рабочий ход St используется в тормозной системе транспортного средства третьего варианта осуществления. Рабочее значение может рассматриваться как параметр, указывающий требуемую полную тормозную силу. Любое из рабочей тормозной силы δ и рабочего хода St может использоваться в качестве рабочего значения в тормозных системах транспортного средства первого и третьего вариантов осуществления. Альтернативно, оба из рабочей тормозной силы δ и рабочего хода St могут использоваться для определения требуемой полной тормозной силы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКОЕ ТОРМОЗНОЕ УСТРОЙСТВО И ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА, ВКЛЮЧАЮЩАЯ В СЕБЯ ЭЛЕКТРИЧЕСКОЕ ТОРМОЗНОЕ УСТРОЙСТВО | 2018 |
|
RU2699512C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2448006C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ | 2020 |
|
RU2744524C1 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА И ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА | 1990 |
|
RU2041090C1 |
| Транспортное средство | 1989 |
|
SU1652115A1 |
| ТРАНСПОРТНАЯ ПРИВОДНАЯ СИСТЕМА | 2010 |
|
RU2510337C2 |
| ТОРМОЗНАЯ СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ | 2008 |
|
RU2505431C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЕМПФИРОВАНИЕМ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657658C1 |
| УСТРОЙСТВО РЕКУПЕРАТИВНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2658614C1 |
| ТОРМОЗНАЯ СИСТЕМА | 2010 |
|
RU2531788C2 |
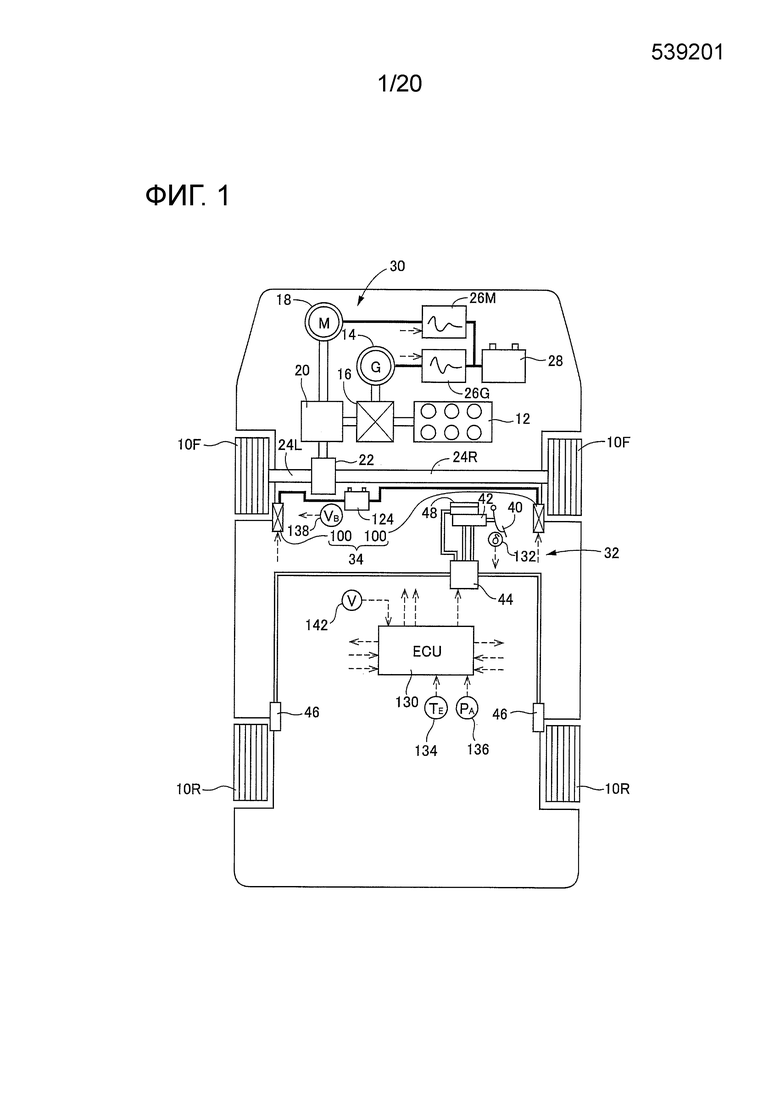
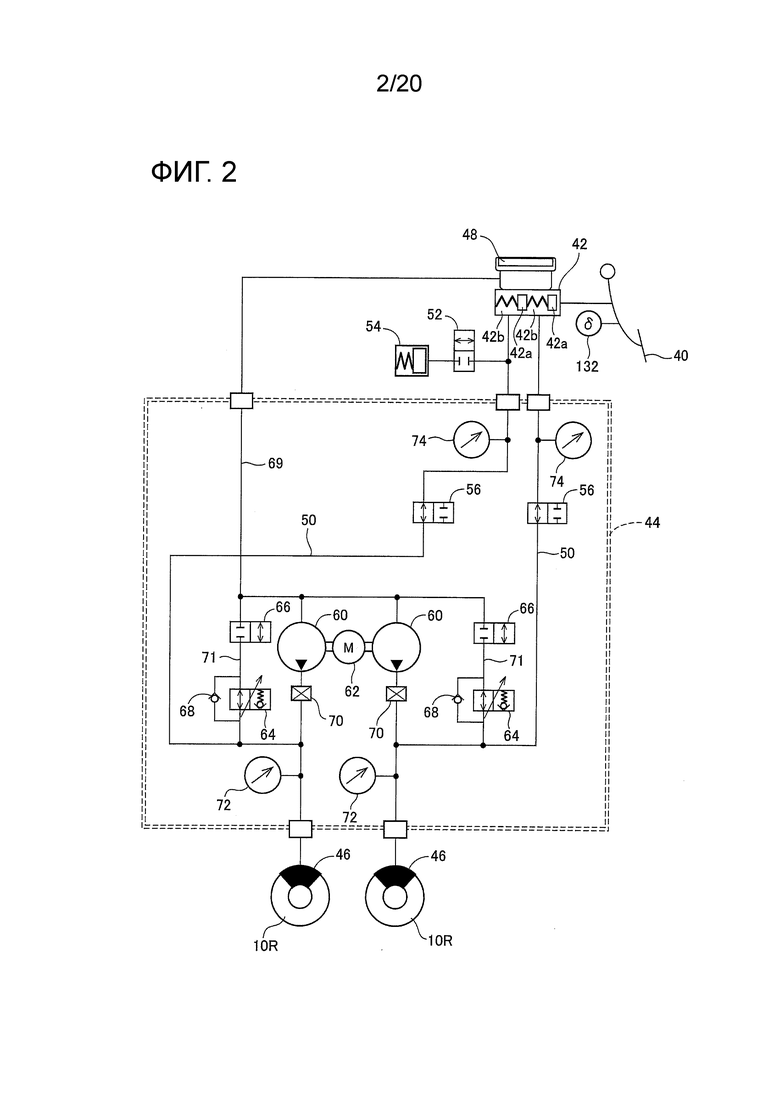
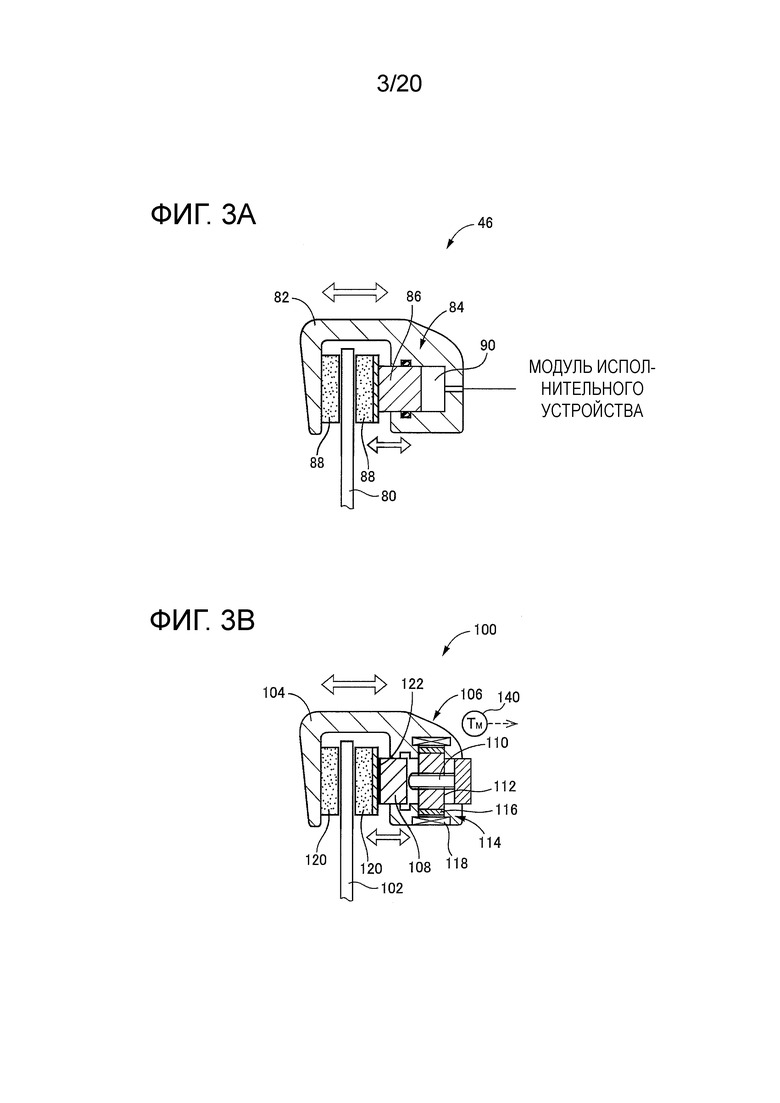
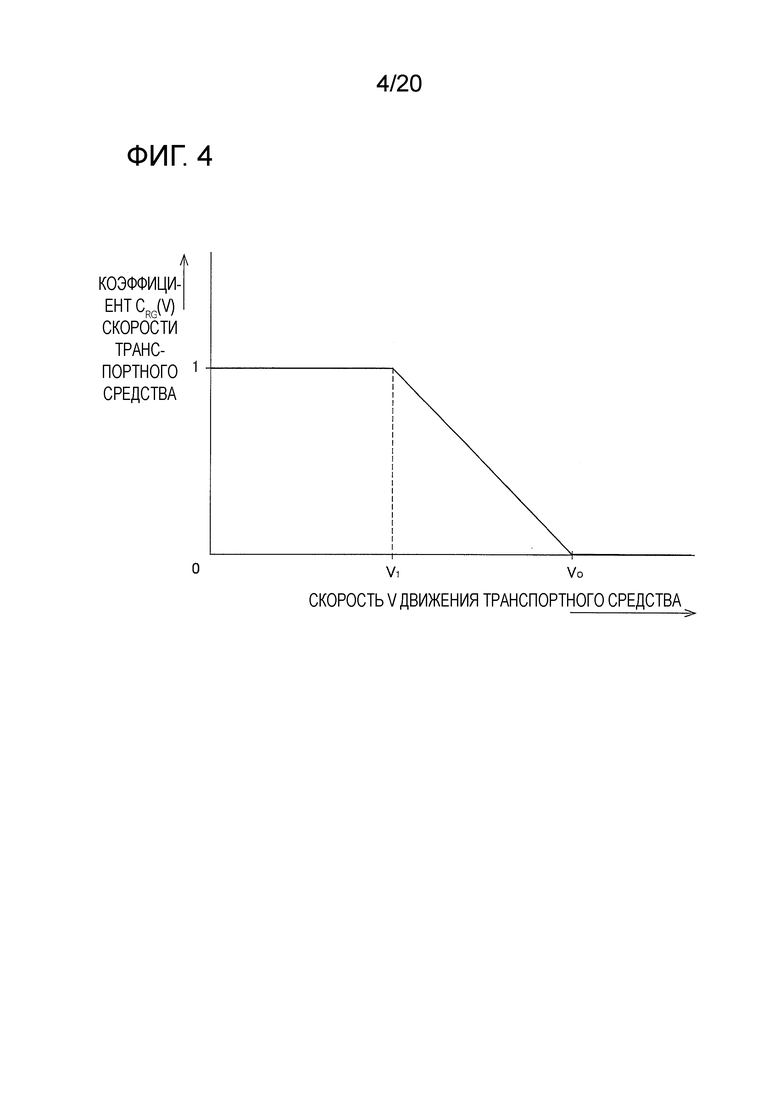
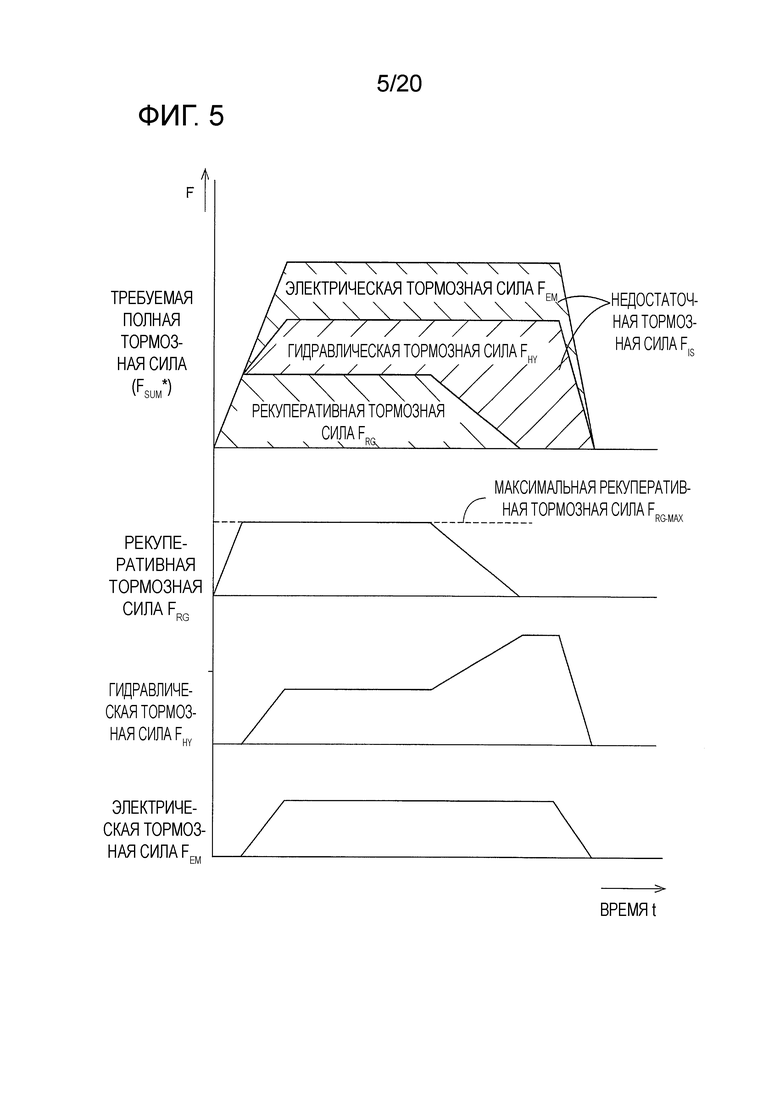
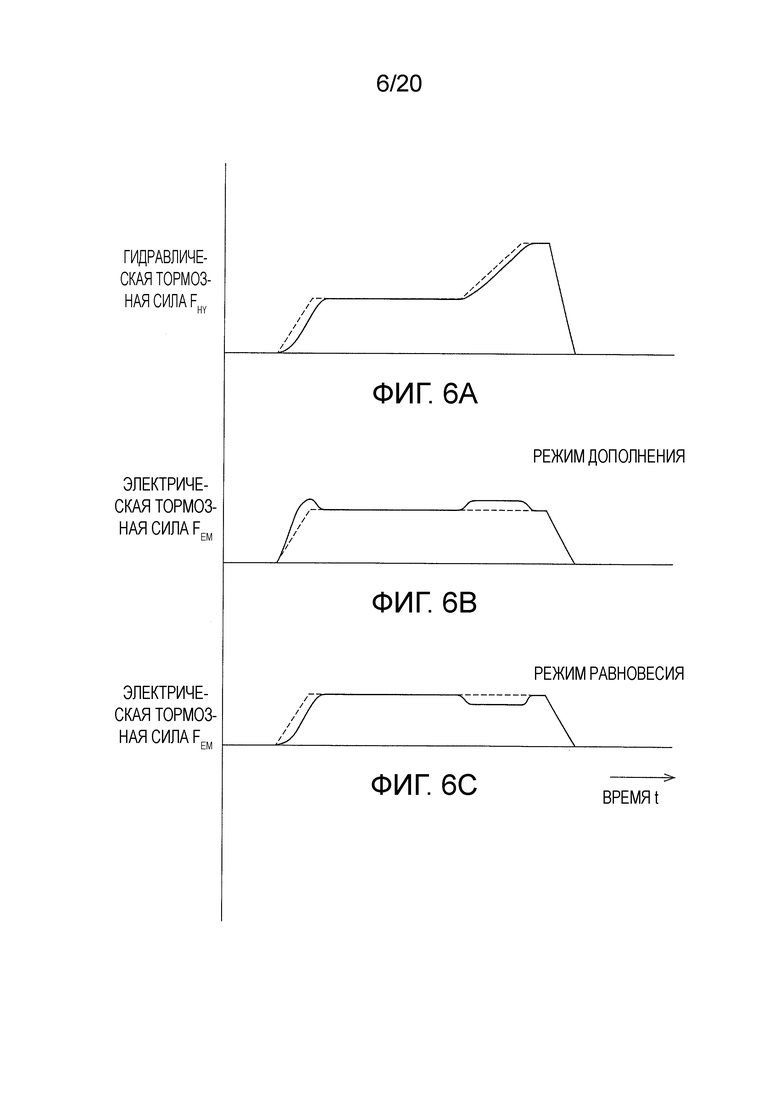
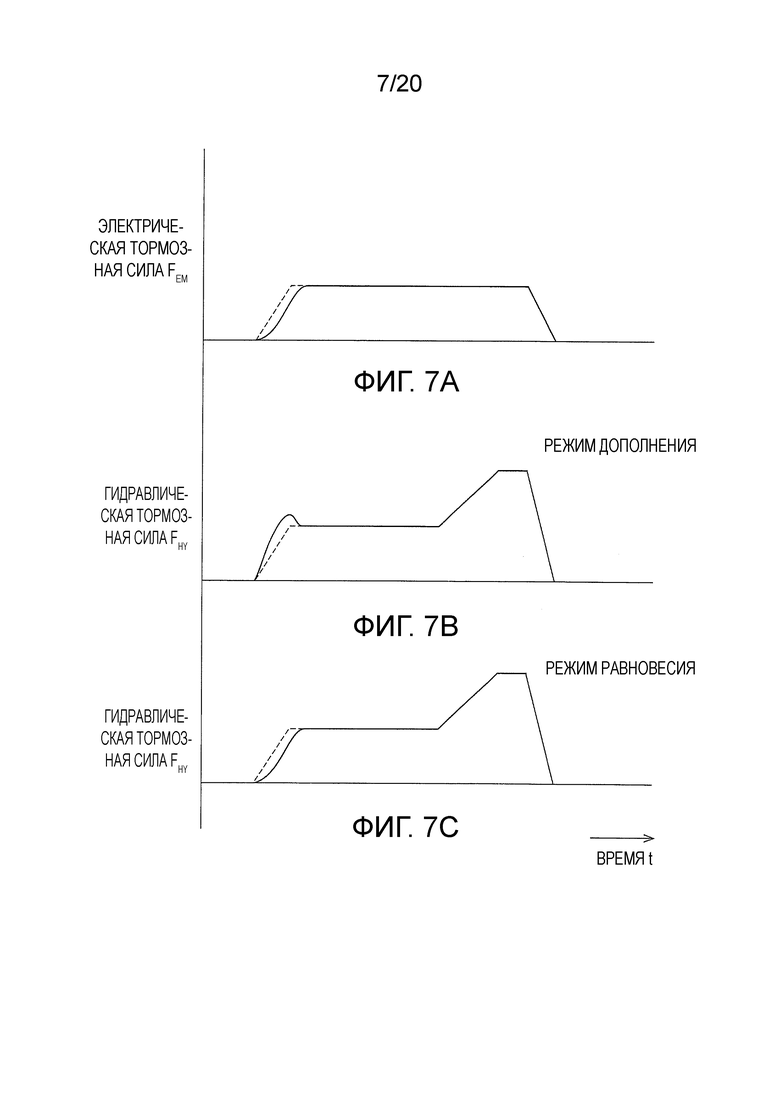
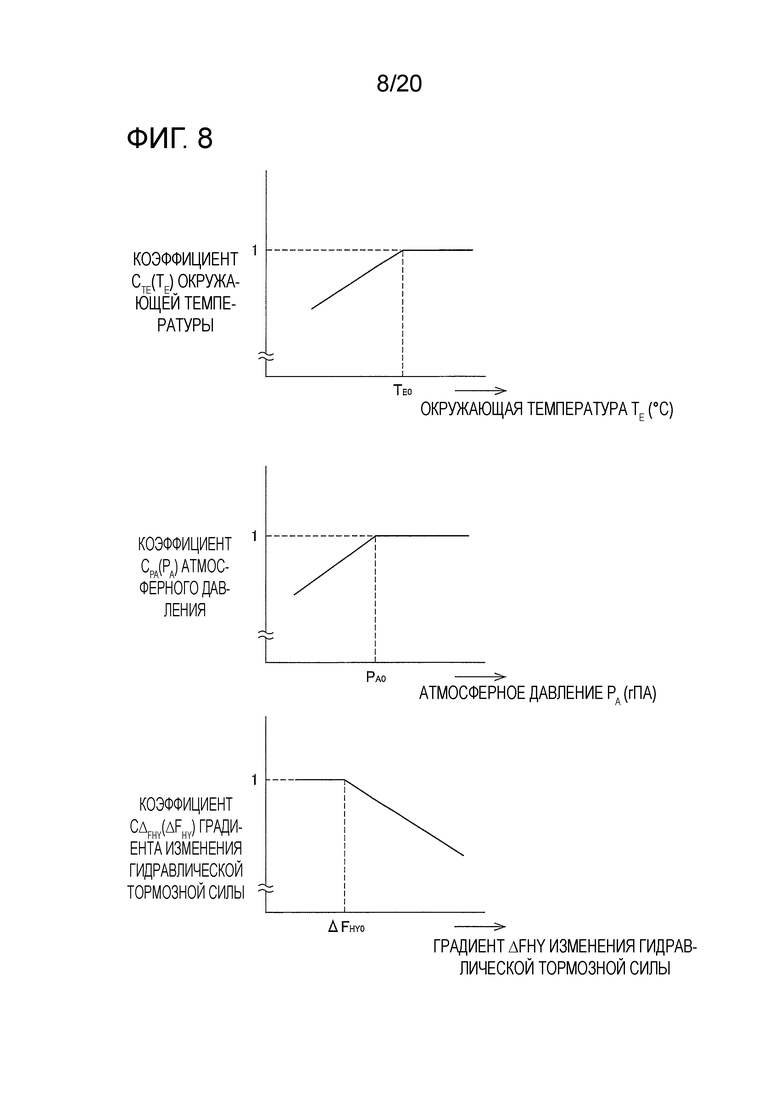
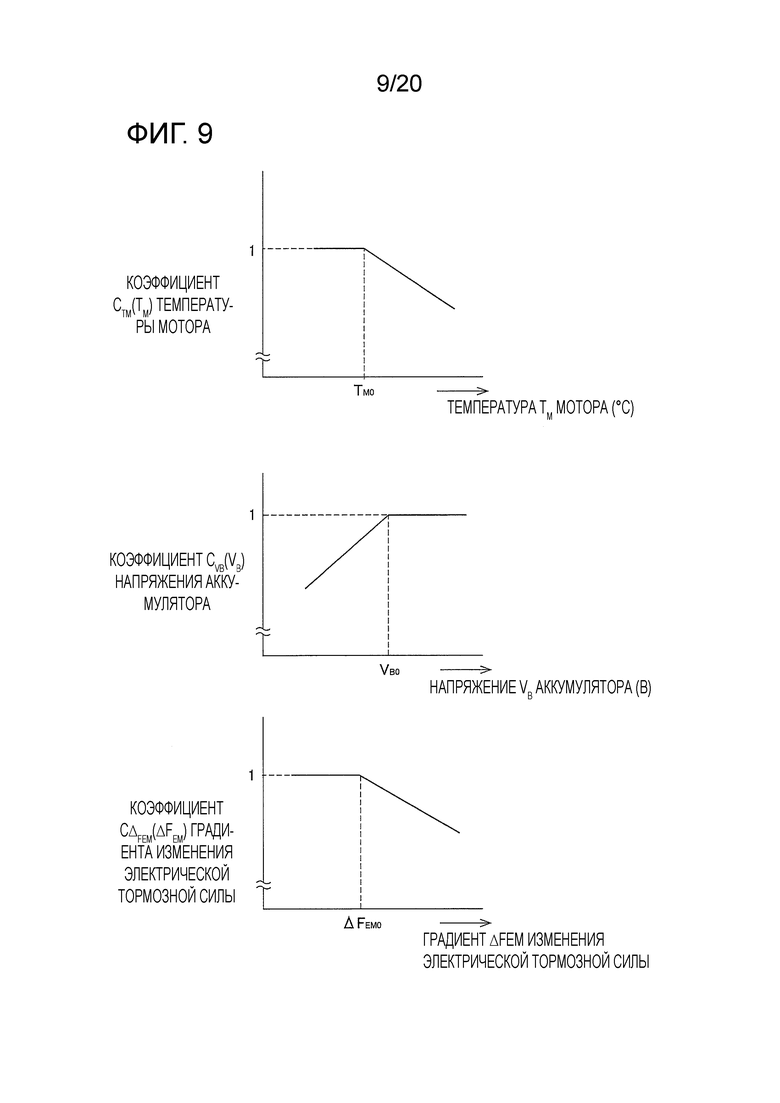
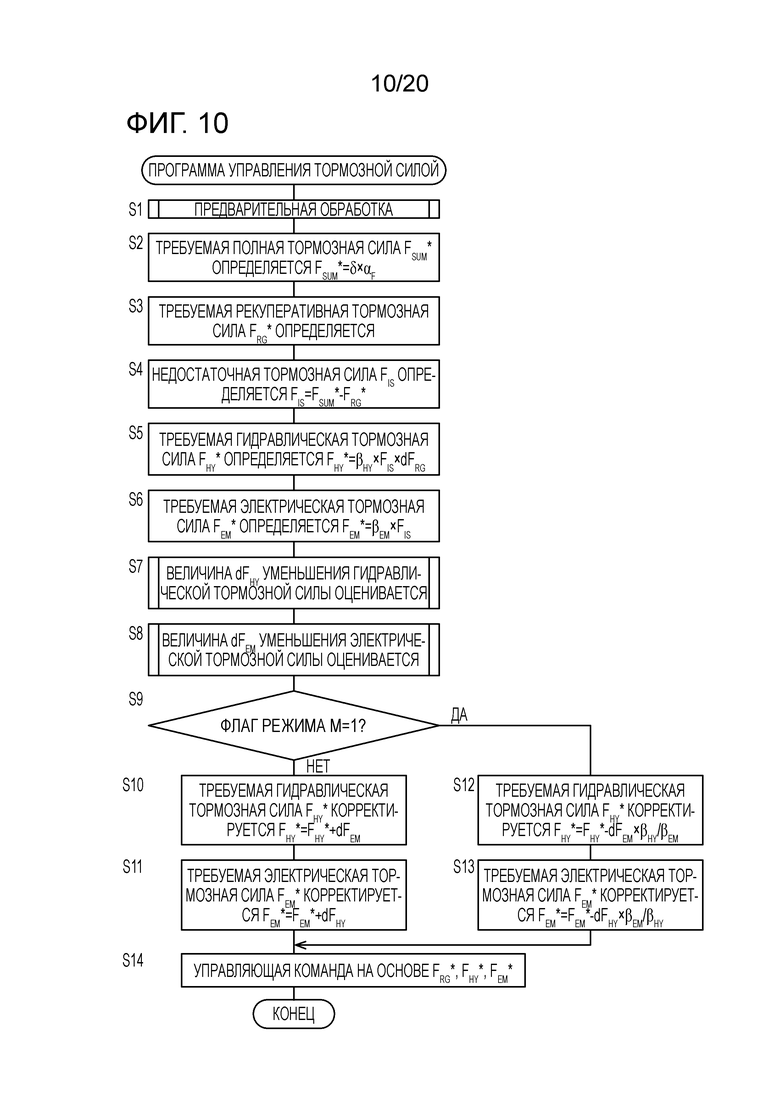
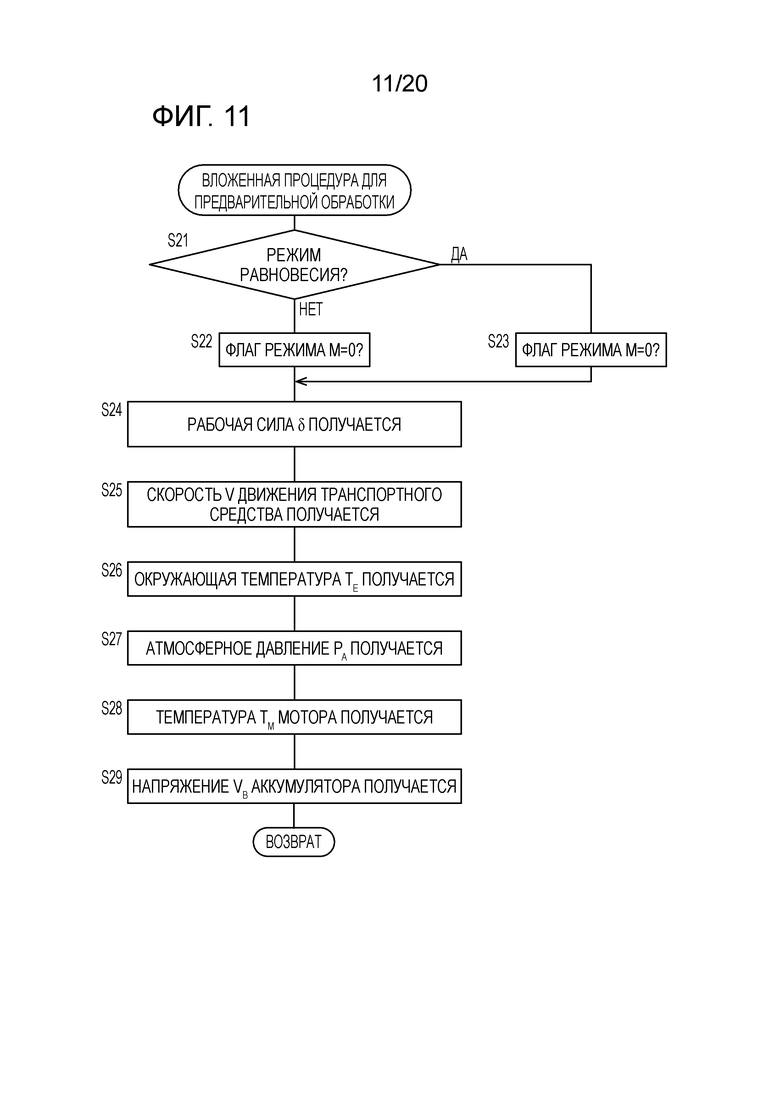
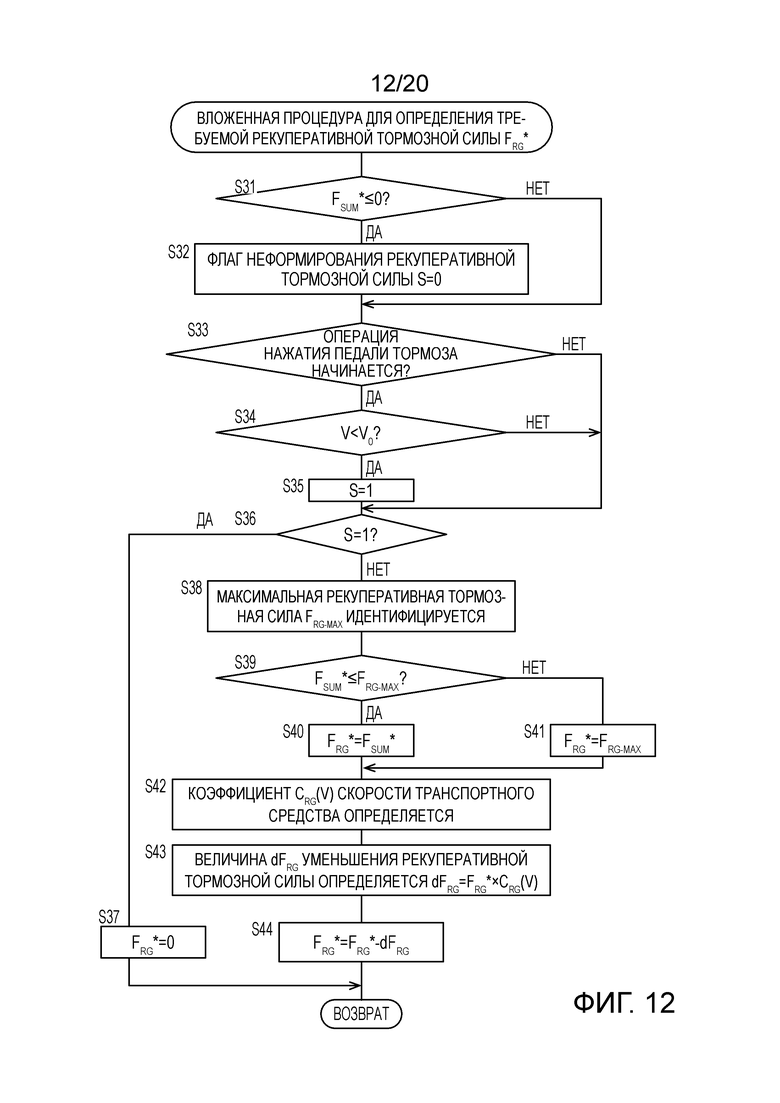
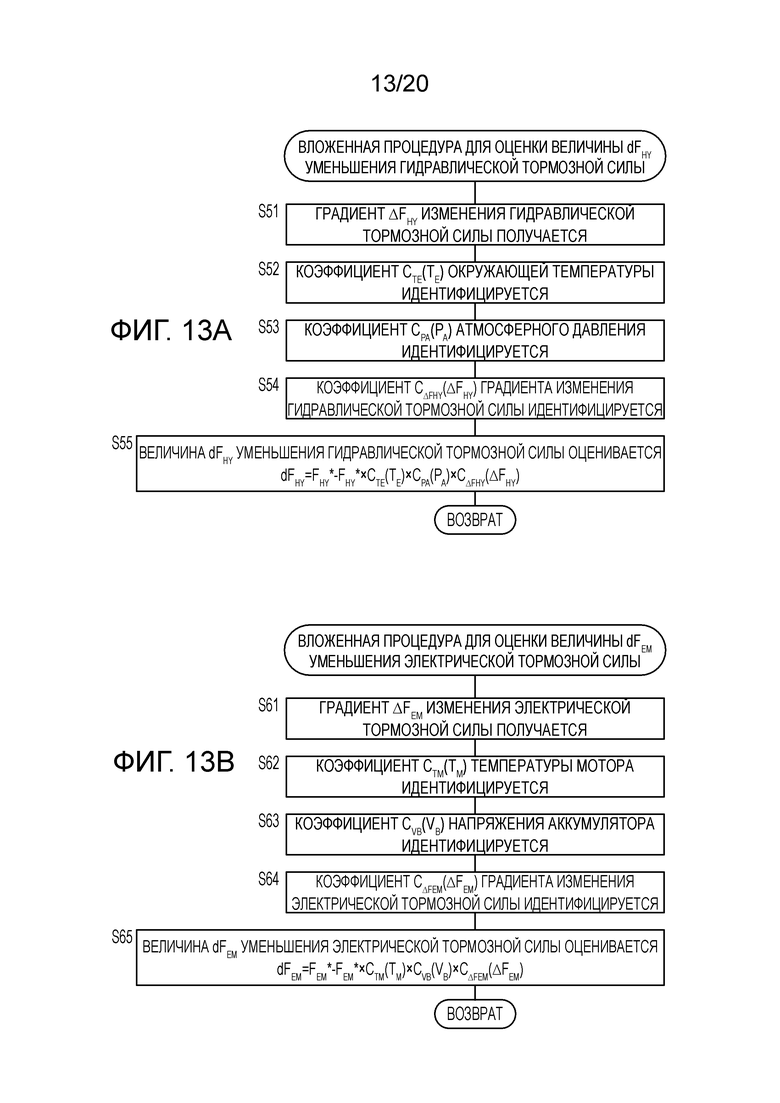
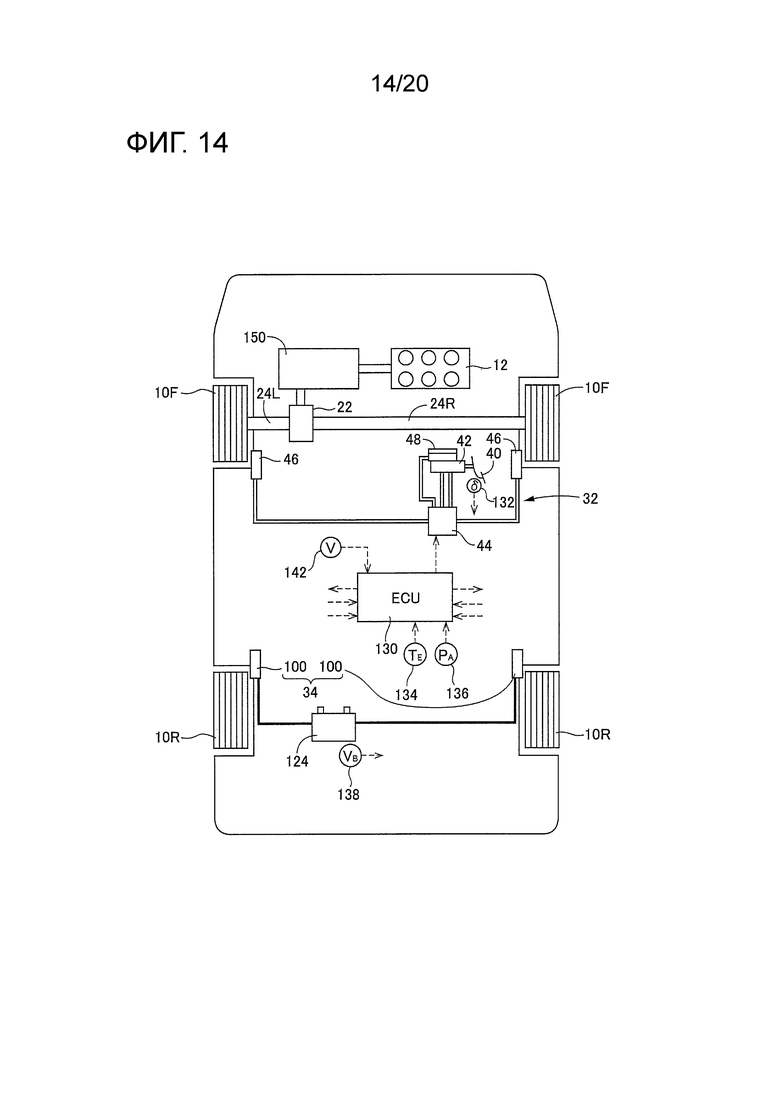
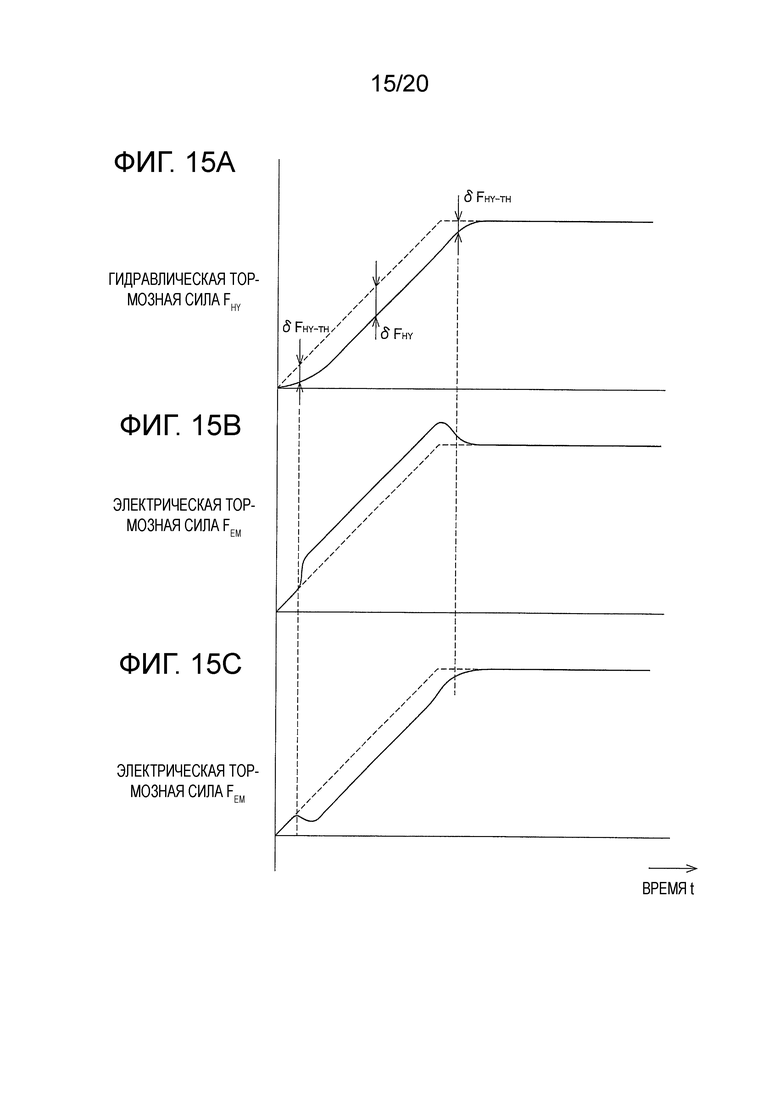
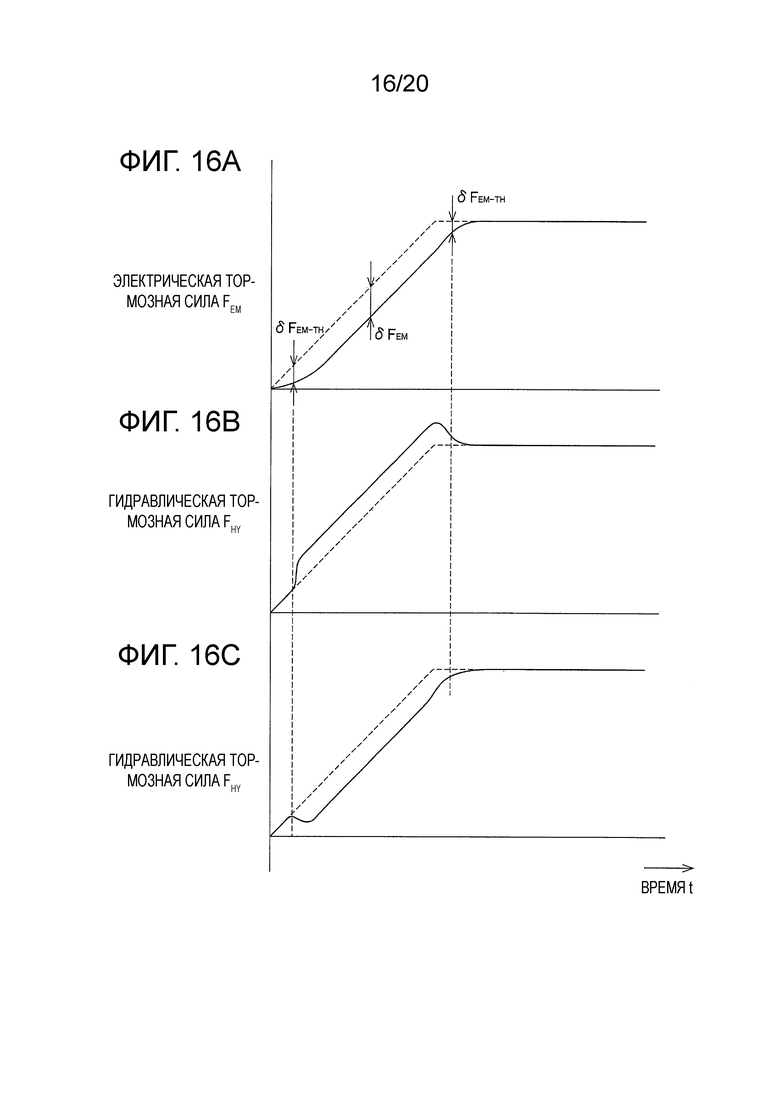
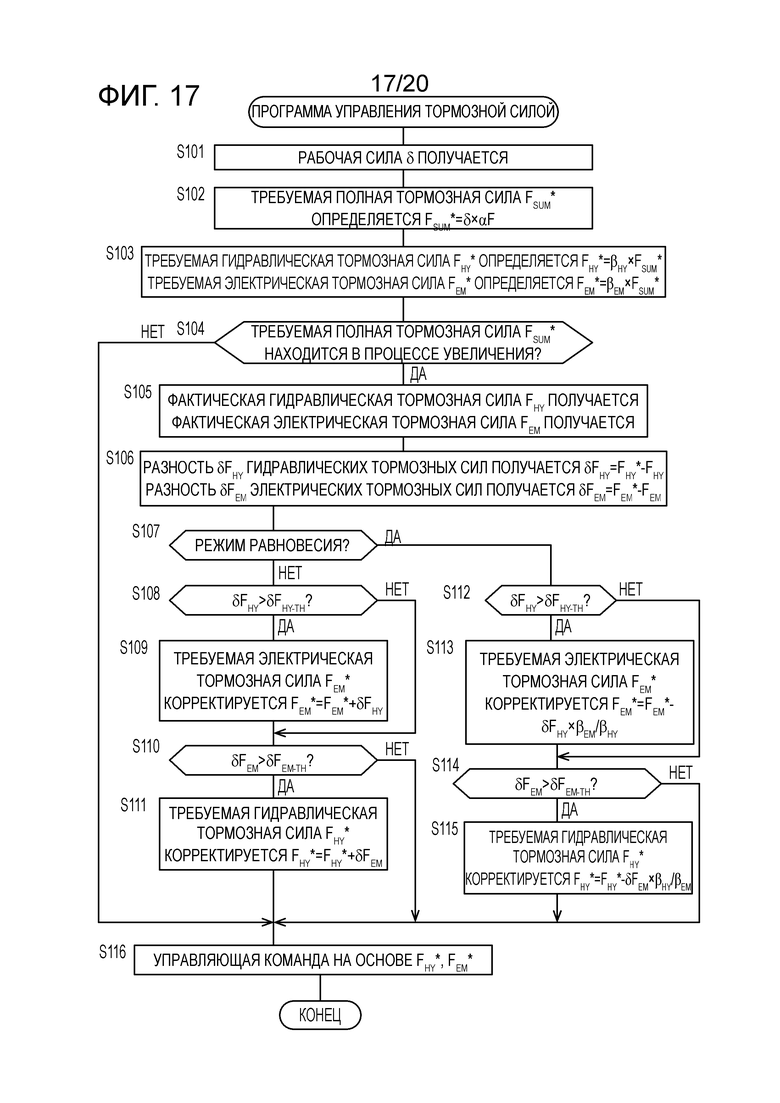
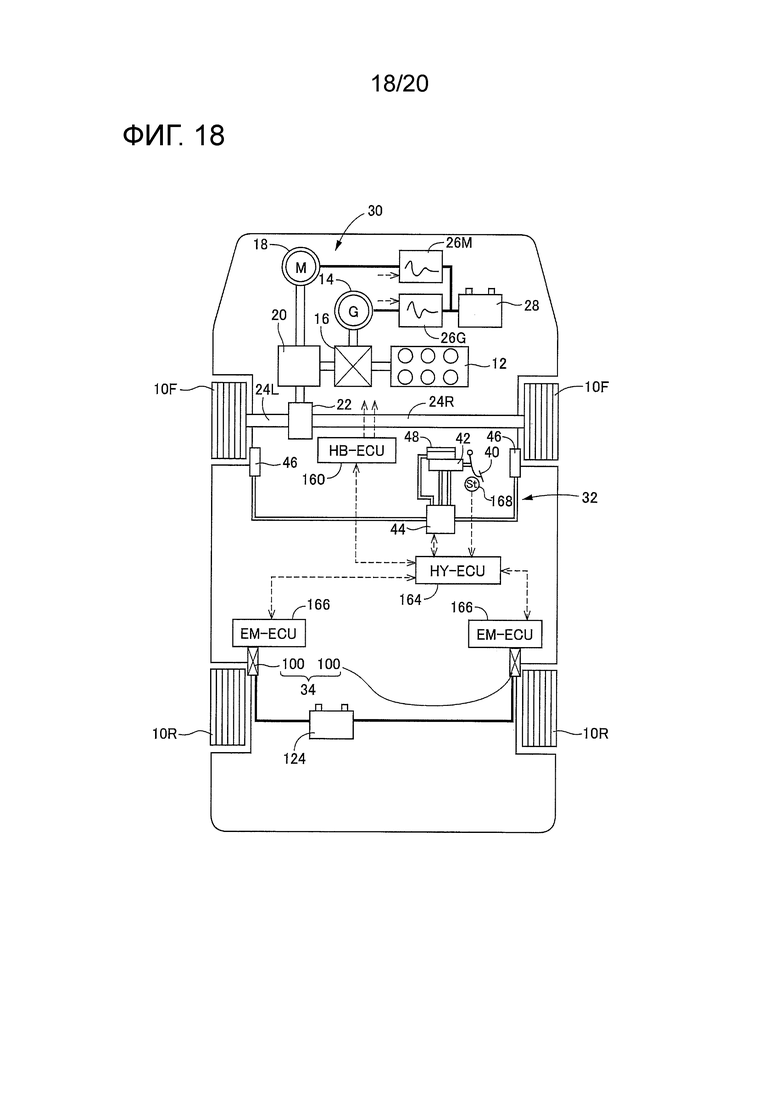
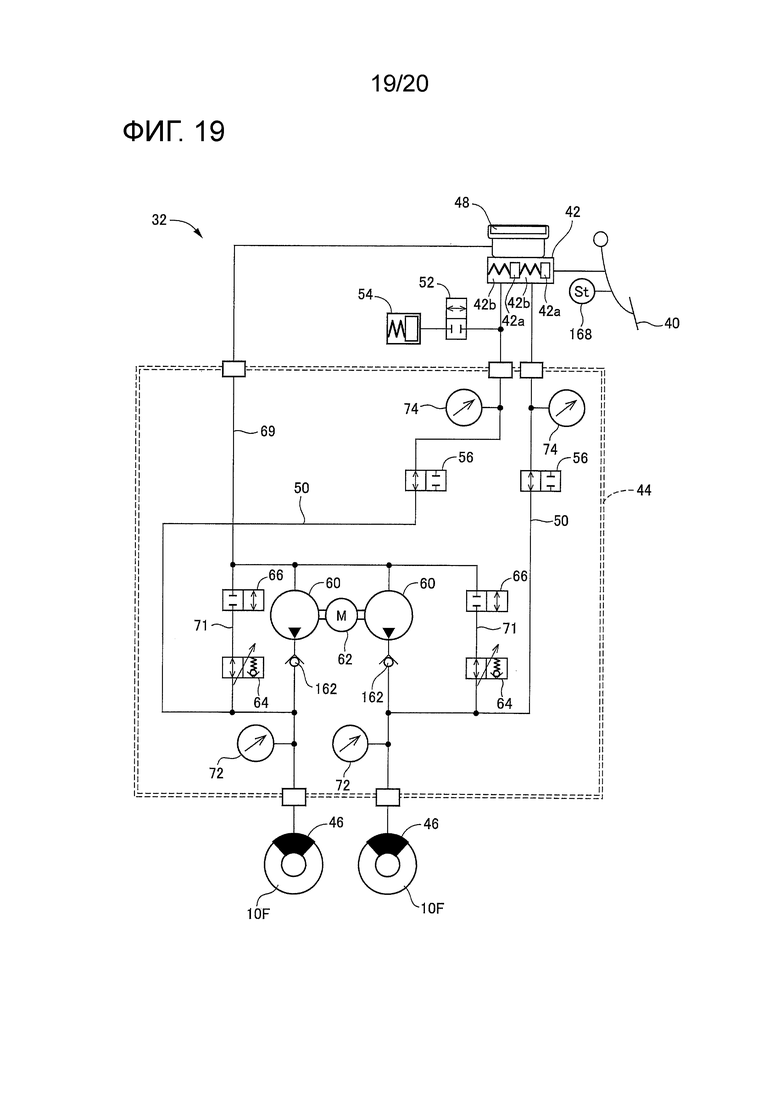
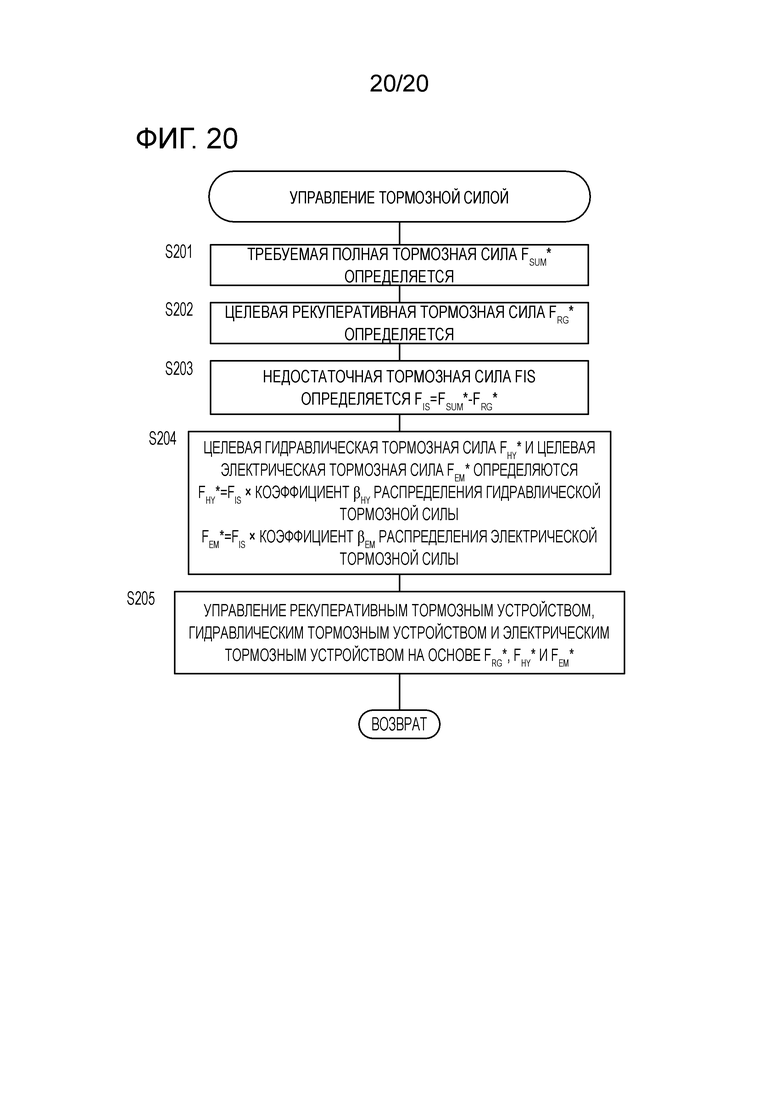
Изобретение относится к области автомобилестроения. Тормозная система транспортного средства включает рабочий тормозной элемент, который должен управляться водителем транспортного средства, гидравлическое тормозное устройство, предусмотренное для одного из переднего колеса и заднего колеса и выполненное с возможностью формировать гидравлическую тормозную силу в соответствии с операцией рабочего тормозного элемента, и электрическое тормозное устройство, предусматриваемое для другого из переднего колеса и заднего колеса и выполненное с возможностью формировать электрическую тормозную силу в соответствии с операцией рабочего тормозного элемента. Гидравлическая тормозная сила зависит от давления рабочей жидкости. Электрическая тормозная сила зависит от движения электромотора. Достигается улучшение технических характеристик устройства. 14 з.п. ф-лы, 30 ил.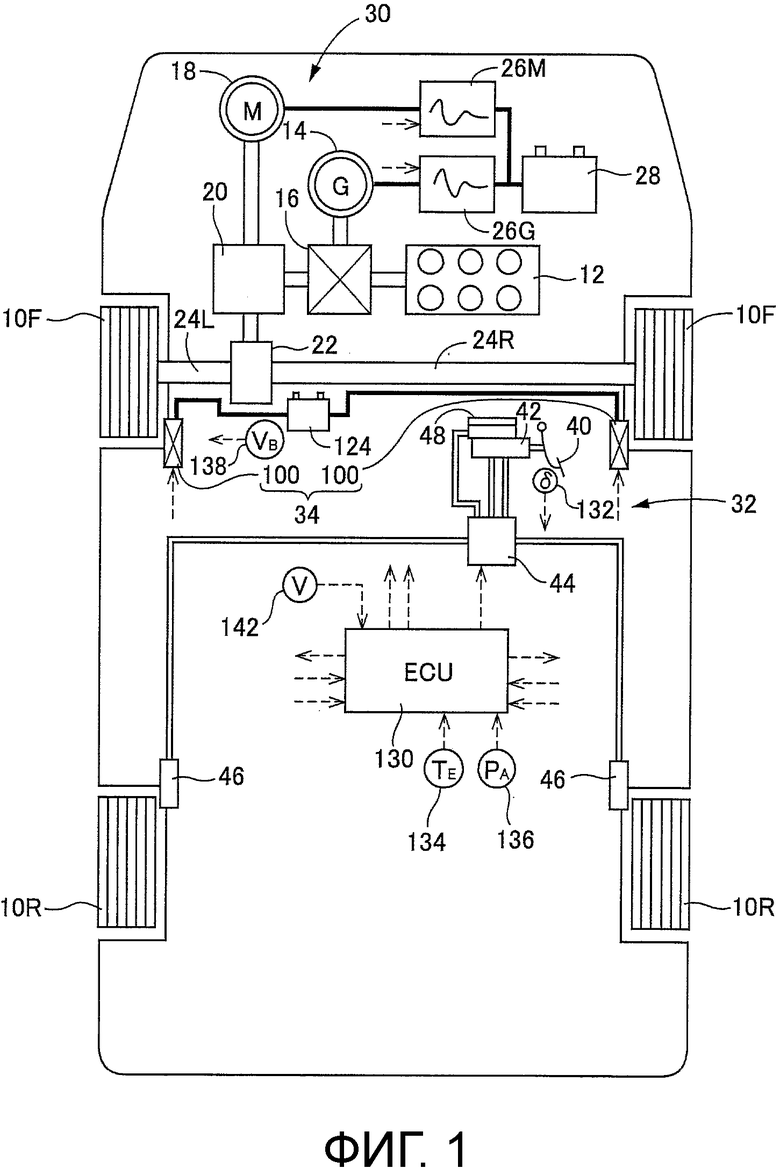
1. Тормозная система транспортного средства, содержащая:
- рабочий тормозной элемент (40), который должен управляться водителем транспортного средства;
- гидравлическое тормозное устройство (32), предусмотренное для одного из переднего колеса (10F) и заднего колеса (10R) и выполненное с возможностью формировать гидравлическую тормозную силу в соответствии с операцией рабочего тормозного элемента, причем гидравлическая тормозная сила зависит от давления рабочей жидкости; и
- электрическое тормозное устройство (34), предусмотренное для другого из переднего колеса и заднего колеса и выполненное с возможностью формировать электрическую тормозную силу в соответствии с операцией рабочего тормозного элемента, причем электрическая тормозная сила зависит от движения электромотора (114);
отличающаяся тем, что оценивается то, что транспортное средство находится в ситуации, в которой одна из гидравлической тормозной силы и электрической тормозной силы уменьшается, на основе, по меньшей мере, одного из среды, в которой размещено транспортное средство, и состояния составляющего компонента тормозной системы транспортного средства, и другая из гидравлической тормозной силы и электрической тормозной силы увеличивается таким образом, что она покрывает уменьшение упомянутой одной из гидравлической тормозной силы и электрической тормозной силы, или в которой другая из гидравлической тормозной силы и электрической тормозной силы уменьшается в соответствии с уменьшением упомянутой одной из гидравлической тормозной силы и электрической тормозной силы, на основе упомянутого оценивания.
2. Тормозная система транспортного средства по п. 1, выполненная с возможностью оценивать то, что транспортное средство находится в ситуации, в которой упомянутая одна из гидравлической тормозной силы и электрической тормозной силы уменьшается, на основе, по меньшей мере, одного из наружной температуры как среды, в которой размещено транспортное средство, атмосферного давления как среды, в которой размещено транспортное средство, температуры электромотора (114) как состояния составляющего компонента тормозной системы транспортного средства и напряжения аккумулятора (28), выполненного с возможностью подавать электрическую мощность в электромотор, как состояния составляющего компонента тормозной системы транспортного средства.
3. Тормозная система транспортного средства по п. 1 или 2, в которой ситуация, в которой другая из гидравлической тормозной силы и электрической тормозной силы уменьшается, является ситуацией, в которой упомянутая одна из гидравлической тормозной силы и электрической тормозной силы уменьшается вследствие задержки увеличения упомянутой одной из гидравлической тормозной силы и электрической тормозной силы.
4. Тормозная система транспортного средства по любому из пп. 1-3, дополнительно содержащая рекуперативное тормозное устройство (30), предусмотренное для одного из переднего колеса (10F) и заднего колеса (10R), для которого предусматривается одно из гидравлического тормозного устройства (32), выполненного с возможностью формировать гидравлическую тормозную силу, и электрического тормозного устройства (34), выполненного с возможностью формировать электрическую тормозную силу, причем рекуперативное тормозное устройство выполнено с возможностью формировать рекуперативную тормозную силу с использованием выработки электрической мощности посредством вращения одного из переднего колеса и заднего колеса, для которого предусматривается рекуперативное тормозное устройство,
- при этом когда операция переключения выполняется для увеличения упомянутой одной из гидравлической тормозной силы и электрической тормозной силы при уменьшении рекуперативной тормозной силы, другая из гидравлической тормозной силы и электрической тормозной силы увеличивается или уменьшается таким образом, что она соответствует уменьшению упомянутой одной из гидравлической тормозной силы и электрической тормозной силы в ситуации, в которой упомянутая одна из гидравлической тормозной силы и электрической тормозной силы уменьшается.
5. Тормозная система транспортного средства по любому из пп. 1-4, выполненная так, что гидравлическая тормозная сила и электрическая тормозная сила могут формироваться при заданном коэффициенте распределения (βHY:βEM).
6. Тормозная система транспортного средства по п. 5, дополнительно содержащая рекуперативное тормозное устройство (30), предусмотренное для одного из переднего колеса (10F) и заднего колеса (10R), для которого предусматривается одно из гидравлического тормозного устройства (32) и электрического тормозного устройства (34), причем рекуперативное тормозное устройство (30) выполнено с возможностью формировать рекуперативную тормозную силу с использованием выработки электрической мощности посредством вращения одного из переднего колеса (10F) и заднего колеса (10R),
- при этом тормозная система транспортного средства выполнена так, что гидравлическая тормозная сила, электрическая тормозная сила и рекуперативная тормозная сила могут управляться таким образом, что они взаимодействуют между собой.
7. Тормозная система транспортного средства по п. 6, выполненная так, что гидравлическая тормозная сила и электрическая тормозная сила могут управляться таким образом, что гидравлическая тормозная сила и электрическая тормозная сила покрывают недостаточную тормозную силу, которая не может покрываться посредством рекуперативной тормозной силы, причем недостаточная тормозная сила является нехваткой в требуемой полной тормозной силе, которая является тормозной силой, требуемой для транспортного средства в целом.
8. Тормозная система транспортного средства по любому из пп. 1-7, в которой гидравлическое тормозное устройство (32) включает в себя:
- тело (80) вращения, выполненное с возможностью вращаться вместе с одним из переднего колеса (10F) и заднего колеса (10R);
- фрикционный элемент (88), выполненный с возможностью прижиматься к телу вращения;
- колесный тормозной цилиндр (84), выполненный с возможностью работать посредством рабочей жидкости, поданной в него, для прижатия фрикционного элемента к телу вращения;
- насос (60), выполненный с возможностью нагнетать давление на рабочую жидкость и подавать рабочую жидкость под давлением в колесный тормозной цилиндр; и
- клапан (64) поддержания давления, выполненный с возможностью управляемо поддерживать давление рабочей жидкости, которая должна подаваться в колесный тормозной цилиндр.
9. Тормозная система транспортного средства по п. 8,
- в которой гидравлическое тормозное устройство (32) дополнительно включает в себя:
- главный цилиндр (42), включающий в себя (a) поршень (42a), соединенный с рабочим тормозным элементом (40), и (b) нагнетательную камеру (42b), в которой на рабочую жидкость, введенную в нее, нагнетается давление посредством перемещения поршня, причем главный цилиндр выполнен с возможностью нагнетать давление на рабочую жидкость посредством рабочей силы, прикладываемой водителем к рабочему тормозному элементу;
- главную магистраль (50) для жидкости, через которую рабочая жидкость, на которую нагнетается давление в нагнетательной камере главного цилиндра, подается в колесный тормозной цилиндр; и
- клапан (56) открытия/закрытия, выполненный с возможностью открывать и закрывать главную магистраль для жидкости,
- при этом операция колесного тормозного цилиндра посредством рабочей жидкости, поданной из главного цилиндра, и операция колесного тормозного цилиндра посредством рабочей жидкости, поданной из насоса, избирательно устанавливаются на основе рабочего режима клапана открытия/закрытия.
10. Тормозная система транспортного средства по п. 9,
- в которой гидравлическое тормозное устройство (32) включает в себя: бачок (48), который содержит рабочую жидкость и из которого насос (60) накачивает рабочую жидкость; и канал (69) для жидкости в бачке, который соединяет бачок и насос, и
- при этом клапан (64) поддержания давления обеспечивает возможность части рабочей жидкости, которая должна подаваться из насоса в колесный тормозной цилиндр (84), проходить через клапан поддержания давления, с тем чтобы регулировать давление рабочей жидкости, и часть рабочей жидкости, которая проходит через клапан поддержания давления, протекает в бачок или канал для жидкости в бачке.
11. Тормозная система транспортного средства по п. 10, в которой гидравлическое тормозное устройство (32) включает в себя отсечной клапан (66), выполненный с возможностью отсекать поток рабочей жидкости в бачок (48) или канал (69) для жидкости в бачке, когда колесный тормозной цилиндр (84) работает посредством рабочей жидкости, поданной из главного цилиндра (42), в состоянии, в котором клапан (56) открытия/закрытия открыт.
12. Тормозная система транспортного средства по п. 10 или 11, в которой бачок (48) располагается около главного цилиндра (42) и на рабочую жидкость из бачка нагнетается давление в нагнетательной камере (42b) главного цилиндра.
13. Тормозная система транспортного средства по любому из пп. 9-12, в которой гидравлическое тормозное устройство (32) включает в себя имитатор (54) сопротивления ходу педали, предусмотренный в главной магистрали (50) для жидкости и выполненный с возможностью обеспечивать возможность операции рабочего тормозного элемента (40), обеспечивая при этом рабочему тормозному элементу противодействующую силу в соответствии с операцией рабочего тормозного элемента, когда колесный тормозной цилиндр (84) работает посредством рабочей жидкости, поданной из насоса (60), в состоянии, в котором клапан (56) открытия/закрытия закрыт.
14. Тормозная система транспортного средства по любому из пп. 8-13, в которой насос (60) и клапан (64) поддержания давления гидравлического тормозного устройства (32) включены в модуль исполнительного устройства (44).
15. Тормозная система транспортного средства по любому из пп. 8-14, в которой клапан (64) поддержания давления представляет собой линейный электромагнитный клапан, выполненный с возможностью уменьшать давление рабочей жидкости, которая должна подаваться в колесный тормозной цилиндр (84), до давления в соответствии с электрическим током, поданным в линейный электромагнитный клапан.
| DE 102012216590 A1, 20.03.2014 | |||
| DE 10010735 A1, 25.01.2001 | |||
| JP 2002067909 A, 08.03.2002 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Гидравлическая тормозная система транспортного средства | 1970 |
|
SU547172A3 |

