Устройство предназначено для обнаружения заранее известного сигнала с линейной частотной модуляцией в условиях шумов и может применяться в системах высокоточного измерения дистанции до отражающих объектов и построения радиолокационных изображений в радиолокационных станциях и системах безопасности на транспорте (контроль нерегулируемых переездов на железных дорогах, обеспечение безопасности путевых бригад на рельсах, предотвращение столкновений на железнодорожном и автомобильном транспорте).
Широко известны устройства согласованной фильтрации входных сигналов в радиотехнических системах (RU 2657462, RU 2518443, RU 2296345, RU 2422851) обработки сложных сигналов в системах радиолокации с целью определения дистанции до объектов, облучаемых зондирующим импульсом. Тип зондирующих сигналов - сверхкороткие импульсы, короткие импульсы с частотной и фазовой модуляцией.
Наиболее близким к заявленному устройству является устройство трансверсального аналогового фильтра для приема ЛЧМ сигналов диапазона СВЧ, описанное в патенте RU 2591475. Работа устройства основана на построении неполной свертки отраженного ЛЧМ сигнала с опорной функцией, заданной точками максимумов зондирующего импульса в аналоговой форме за счет формирования аналоговых трактов свертки входного сигнала.
Недостатком данного устройства является его жесткая, неадаптивная структура, позволяющая принимать только один конкретный ЛЧМ сигнал с параметрами, соответствующими настройкам опорной функции, что серьезно ограничивает область применения прототипа.
Технический результат, который требуется достигнуть предлагаемым устройством - обеспечение согласованной фильтрации ЛЧМ сигналов с изменяемыми параметрами, такими, как девиация и длительность импульса.
Достигнуть этого можно при переходе к цифровой обработке принимаемого отраженного ЛЧМ сигнала с использованием программируемых логических матриц (ПЛИС).
Технический результат достигается за счет того, что в предлагаемом изобретении, устройство согласованной фильтрации произвольных отраженных от протяженных объектов ЛЧМ сигналов в реальном времени, содержит набор каналов накопления, причем количество каналов определяется дистанцией зондирования протяженных объектов, а длительность накопления - длительностью импульса ЛЧМ сигнала, при этом, устройство согласованной фильтрации реализовано на ПЛИС, в качестве фазовых контуров выступают каналы накопления принимаемого сигнала, а суммирование входных сигналов с АЦП осуществляется в каналах накопления с учетом знака бинарной опорной функции, полученной из формы зондирующих сигналов, через дискретные промежутки времени в реальном потоке входных данных.
Рассматриваемое устройство представляет собой цифровой согласованный фильтр для приема отраженных от предметной области произвольных (по частоте, длительности импульса и полосе) ЛЧМ сигналов. Задачей согласованного фильтра является выделение слабого принимаемого сигнала из шума с его одновременной локализацией по времени, без выполнения условия сохранения исходной формы сигнала. Согласно теории, согласованный фильтр вычисляет свертку принимаемого сигнала с эталонным, что требует большого числа арифметических операций, включая операции умножения.
Для реализации вычисления свертки в реальном времени требуется либо переходить к аналоговым операциям, как в выбранном прототипе, либо отказываться от затратных по времени арифметических операций и переходить к распараллеливанию обработки принимаемого сигнала.
Предлагаемое устройство согласованной фильтрации произвольных отраженных от протяженных объектов ЛЧМ сигналов в реальном времени вычисляет свертку отраженных от предметной области сигналов, дискретных по частоте оцифровки точках с опорным сигналом, являющимся не отсчетами зондирующего сигнала, а отсчетами бинарной функции от зондирующего сигнала в этих же дискретных точках.
Бинарная функция строится на этапе инициализации ПЛИС при включении и хранится в памяти ПЛИС до следующего включения, когда параметры опорной функции могут быть изменены. Бинарная функция принимает значения в заданных точках, равные 1, когда зондирующий ЛЧМ сигнал больше либо равен 0 в той же точке, и (-1), когда зондирующий сигнал меньше 0.
При сигналах достаточно большой длительности, т.е. представленных в цифровом виде значительным количеством отсчетов, потеря точности при вычислении свертки не с копией излучаемого сигнала, а с соответствующей бинарной функцией, незначительна и приводит к некоторому увеличению боковых лепестков и уменьшению центрального пика свертки, но не к его «заплыванию», что и важно для определения дальности.
При этом отказ от учета амплитуды эталонного сигнала путем замены его на бинарную функцию, означает исключение операций умножения (домножать принимаемый сигнал потребуется на 1 или -1, что реализуется простым учетом знака при дальнейшем суммировании).
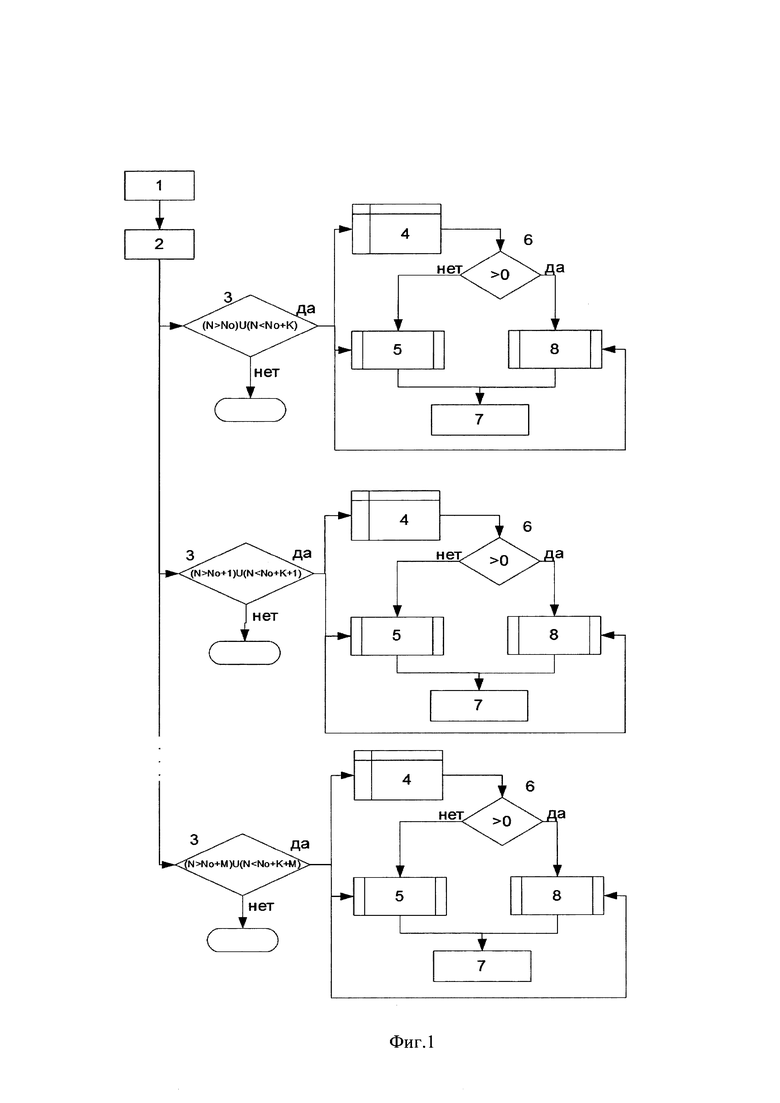
На Фиг. 1 приведена функциональная схема устройства согласованной фильтрации произвольных отраженных ЛЧМ сигналов в реальном масштабе времени.
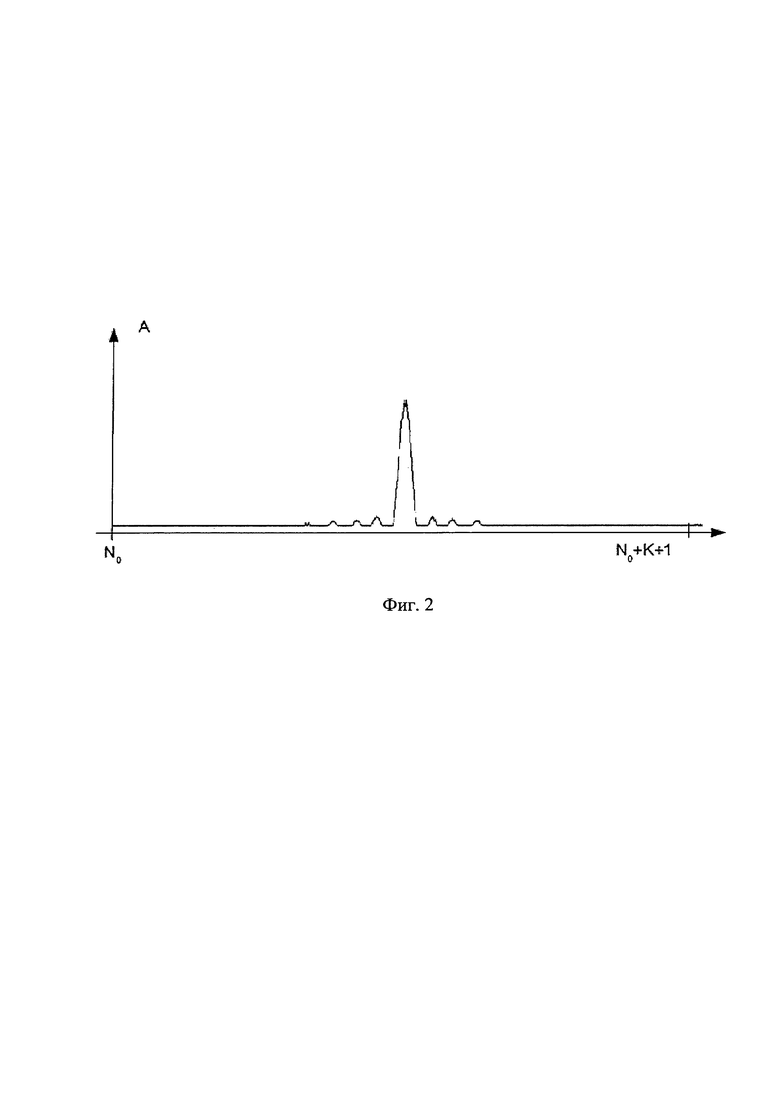
На Фиг. 2 показан результат накопления сверток отраженного зондирующего импульса в сумматорах ПЛИС.
Устройство согласованной фильтрации произвольных отраженных ЛЧМ сигналов в реальном масштабе времени содержит. Блок синхронизации -1, строб управления АЦП -2, блоки условного оператора -3, кольцевые буферы -4, блоки инверсии -5, блок проверки знака -6, накапливающие сумматоры -7 и регистр временного хранения -8.
Устройство работает следующим образом.
Блок синхронизации -1 предназначен для синхронизации процессов запуска зондирующего импульса ЛЧМ сигнала и начала обработки в согласованном цифровом фильтре. В момент запуска импульса счетчик циклов (условно не показан) обнуляется и обнуляются все накапливающие сумматоры -7. Далее блок синхронизации -1 формирует строб управления АЦП -2 и при каждом стробе счетчик увеличивается на 1.
Сам цифровой согласованный фильтр представляет собой набор из М параллельных процессов, каждый из которых запускается по условию блока условного оператора -3 со сдвигом в 1 временной отсчет т по дальности и существует в течение К отсчетов, соответствующих длине импульса Т=К⋅τ. Для уменьшения числа параллельных процессов первый процесс запускается с задержкой N0 относительно запуска зондирующего импульса, соответствующего приблизительному времени касания зондирующим импульсом предметной плоскости. Величина N0 зависит от высоты антенны над предметной плоскостью Н, угла наклона антенны к вертикали А, величины диаграммы направленности антенны в вертикальной плоскости ДН и может быть вычислена по формуле

Здесь [..] - целая часть числа в скобках. В ряде задач, при одновременной работе системы на излучение зондирующего импульса и прием отраженного сигнал N0 может быть принято равным 0.
Кольцевые буферы -4 во всех ветвях обработки одинаковы, имеют длину К бит и содержат знаки опорной функции в точках свертки. Опорная функция - зондирующий ЛЧМ сигнал в цифровом представлении

где W - начальная частота ЛЧМ сигнала, ΔW - полоса ЛЧМ сигнала.
Знаковая функция в момент п имеет величину +1, если Fon(n)>0 и 0, если Fon(n)<0.
При каждом такте в зоне работы i параллельного процесса по условию (N>No+i и N<No+i+K) из кольцевого буфера -4 по текущему адресу извлекается бит текущего знака опорной функции и отправляется для анализа его значения в блок - 6. Адрес кольцевого буфера после этого увеличивается на 1. Таким образом, к концу работы данного процесса адрес кольцевого буфера - 4 обнуляется для работы со следующим импульсом. Содержимое и размер кольцевых буферов - 4 формируются при инициализации ПЛИС, при каждом включении фильтра, в зависимости от параметров зондирующего сигнала.
Если знак в текущий момент равен 0, центрированный входной сигнал с АЦП (2) инвертируется блоком -5 и подается на накапливающий сумматор - 7 данного параллельного процесса. Если знак равен 1, то входной сигнал с АЦП подается в сумматор без изменений, чему на приведеной на фиг. 1 схеме соответствует блок - 8.
Таким образом, по истечение М+К отсчетов в сумматорах содержатся свертки от М точек по дальности, которые используются для последующего выявления отражающих объектов по заданной дистанции, что и требовалось обеспечить для согласованной фильтрации. При этом результат достигается для ЛЧМ сигнала с изменяемыми параметрами, так как опорная бинарная функция строится для используемого сигнала, после чего записывается в кольцевые буферы. Технический результат достигнут полностью.
Изобретение относится к средствам обнаружения сигнала с линейной частотной модуляцией в условиях шумов. Технический результат заключается в обеспечении согласованной фильтрации ЛЧМ сигналов с изменяемыми параметрами, такими как девиация и длительность импульса. Устройство работает в реальном масштабе времени, на базе ПЛИС за счет использования в свертке с входными сигналами опорной функции, полученной бинарным преобразованием зондирующего ЛЧМ сигнала. Использование бинарной опорной функции позволяет повысить контрастность изображения для протяженных объектов в предметной области, что позволяет лучше выявлять области, представляющие интерес для последующей идентификации, и улучшает численный анализ дальности до них, а также позволяет адаптировать одно и то же устройство для разных по частоте, полосе и длительности зондирующих ЛЧМ сигналов путем загрузки при инициализации изменяемых параметров и массивов опорного бинарного сигнала. 2 ил.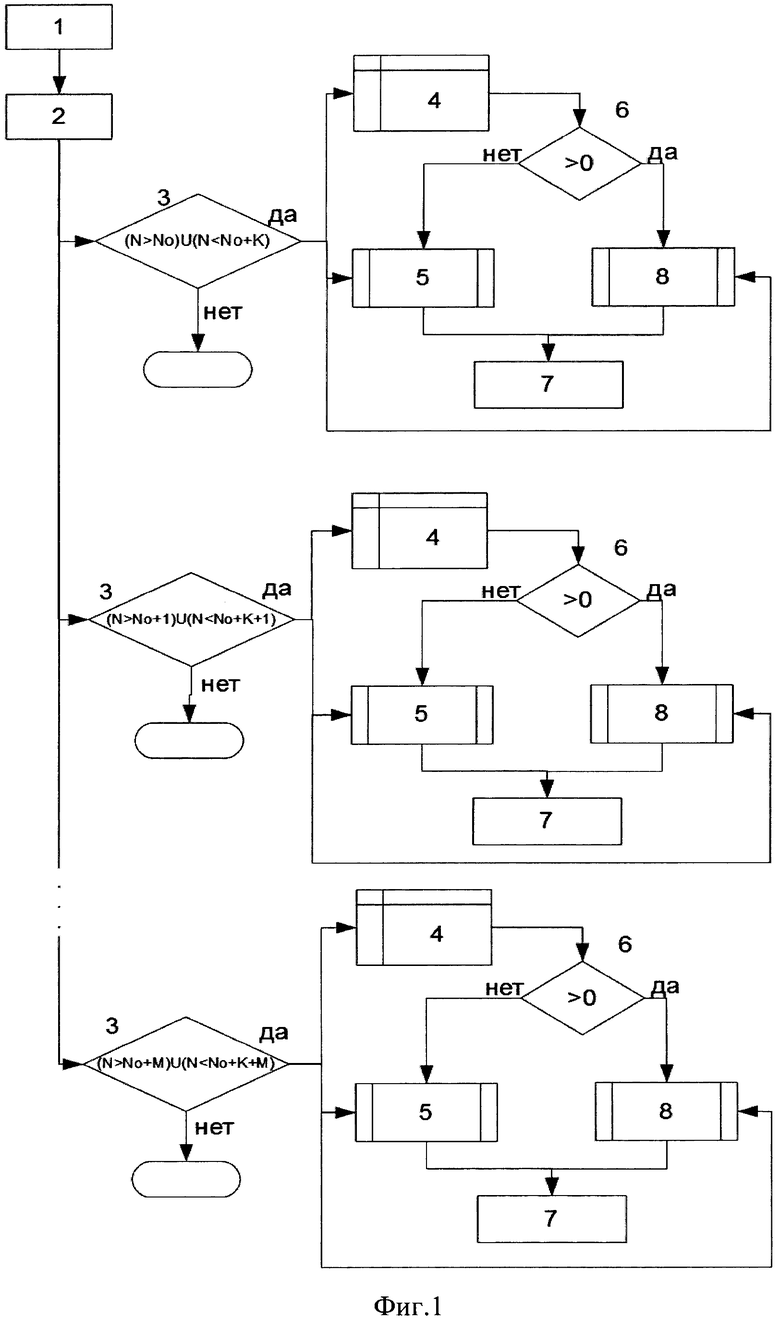
Устройство согласованной фильтрации произвольных отраженных от протяженных объектов ЛЧМ сигналов в реальном масштабе времени, содержащее набор каналов накопления, причем количество каналов определяется дистанцией зондирования протяженных объектов, а длительность накопления - длительностью импульса ЛЧМ сигнала, отличающееся тем, что устройство согласованной фильтрации реализовано на ПЛИС, в котором программно сформированные каналы накопления содержат блоки условного оператора для разрешения суммирования, накапливающие сумматоры и кольцевые буферы, которые имеют длину К бит и содержат знаки опорной функции, блок синхронизации предназначен для синхронизации процесса запуска зондирующего сигнала линейно-частотной модуляции и формирования строба управления АЦП с временным сдвигом в течение К отсчетов, соответствующих длине импульса ЛЧМ, в результате чего по истечении М+К отсчетов в накапливающих сумматорах содержится свертка от М точек по дальности.
| ТРАНСВЕРСАЛЬНЫЙ АНАЛОГОВЫЙ ФИЛЬТР ДЛЯ ПРИЕМА ЛЧМ СИГНАЛА ДИАПАЗОНА СВЧ | 2015 |
|
RU2591475C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| US 5019826 A, 28.05.1991 | |||
| US 9112756 B1, 18.08.2015 | |||
| EP 3229030 A1, 11.10.2017. | |||

