Изобретение относится к радиолокационной технике и может быть использовано для обнаружения и измерения расстояний до разного рода неподвижных объектов, а также для измерения расстояний и радиальной скорости движущихся объектов. Способ может быть использован в радиолокации и гидролокации, в области геологии, археологии, в землеустроительных работах и других сферах деятельности, где необходимо измерять расстояния до недоступных объектов.
Известны способы измерения дальности до цели, заключающиеся в излучении зондирующего импульса (ЗИ) с линейной частотной модуляцией несущей частоты (ЛЧМ) и обработке отраженных импульсов (ОИ) либо корреляционно-фильтровым способом, либо путем сжатия длительности ОИ с помощью согласованного фильтра.
Такие способы и устройства описаны в специализированной технической и патентной литературе, например:
Теоретические основы радиолокации, учебник под ред. Ширмана Я.Д., стр. 120, 128, 135, «Войска ПВО страны», 1968 г;
- Справочник по радиолокации, т. 3, под ред. М. Сколника, стр. 400, 403, 383, М. «Советское радио», 1979 г;
- Патент США №5905458, «FM radar apparatus», МПК G01S 13/42, заявка №08/974013 от 19.11.1997 г., заявитель HONDA GIKEN KOGYO KABUSHIKI KAISHA, Япония.
Данные способы за счет использования частотной модуляции обеспечивают обнаружение целей на больших расстояниях с высокой разрешающей способностью по дальности тогда, когда время задержки ОИ больше длительности ЗИ, т.е. когда ОИ не перекрывается по времени с ЗИ.
Увеличение длительности ЗИ является средством увеличения его энергии в условиях, когда достигнута предельная пиковая мощность передатчика. Длительность ЗИ может быть доведена до величины, равной удвоенному времени распространения сигнала до цели, находящейся на максимальном расстоянии. Чтобы принять весь сигнал с максимальной дальности длительность интервала приема должна быть не меньше длительности ЗИ. При этом импульсы, отраженные от целей, находящихся на меньших расстояниях, начнут поступать еще во время излучения.
В моностатических РЛС для защиты приемника от мощного излучения его входные цепи на время излучения блокируются. Вследствие этого на выходе приемника происходит укорочение длительности ОИ. По этой причине уменьшается база сигнала, равная произведению ширины спектра на длительность сигнала. Соответственно, при фильтрации ОИ уменьшается степень сжатия его длительности и как результат этого, падает разрешающая способность и точность измерения дальности, что и является существенным недостатком, присущим вышеуказанным способам.
Кроме этого, текущий замер дальности цели содержит ошибку из-за доплеровского смещения несущей частоты ОИ.
Эта ошибка может устраняться путем реализации способа, который включает последовательное излучение сигнала с ЛЧМ несущей частоты с определенной крутизной и без ЛЧМ, измерение доплеровского сдвига частоты сигнала от цели и вычисление дальности до цели делением разности доплеровского сдвига на удвоенную крутизну изменения несущей частоты (см. М. Сколник, стр. 383, М. «Советское радио», 1979 г.).
Однако этот способ не решает проблемы снижения разрешающей способности и точности измерения дальности при наложении интервалов времени формирования зондирующего и времени прихода отраженных импульсов.
Известен способ последовательного излучения сигнала с двумя рабочими частотами повторения импульсов, определения временного положения отраженных от цели импульсов на каждой частоте повторения и определения истинной дальности. Данный способ обеспечивает измерение дальности в режиме обзора в РЛС со средней частотой повторения (см. «Бортовые радиолокационные системы» под ред. Д. Повейсила., Р. Ровена, П. Уотермана, Воениздат МО СССР, Москва, 1964 г., стр. 317-320).
Недостатком этого способа является неоднозначность измерения дальности, которая тем больше, чем больше период повторения. Увеличение периода повторения ведет к снижению средней мощности ЗИ, следствием чего является уменьшение дальности действия РЛС. Так же, как и предыдущие способы, данный способ не обеспечивает постоянства разрешающей способности и точности измерения дальности при перекрытии интервала зондирования и времени поступления отраженных импульсов.
Известен способ, состоящий в сочетании операций двух способов - линейно-частотной модуляции и двухчастотного. Способ заключается в излучении импульсных сигналов с частотой повторения F1, приеме отраженных импульсных сигналов и измерении их доплеровской частоты f1, последующем излучении сигналов с линейно-частотной модуляцией несущей частоты с крутизной S, приеме отраженного ЛЧМ сигнала, измерении разности частот f2 между излучаемым и принимаемым ЛЧМ сигналами и вычислении дальности по определенной формуле, измерении задержки отраженных импульсных сигналов t1 на частоте повторения F1, дополнительном излучении импульсных сигналов с частотой повторения F2, рассчитываемой по приведенной формуле в зависимости от максимально возможной ошибки измеренного значения дальности, приеме отраженных сигналов и измерении их задержки t2, а истинную дальность определяют по указанной в изобретении формуле (см. «Способ измерения дальности», Патент РФ, №2145092, G01S 13/02, 27.01.2000, авторы Бабичев В.А.; Ривес Л.С.; Риман А.И.; Сирота О.А.; Дубинский М.Л.; Гринберг В.Б.; Синицына О.С.).
Данный способ обеспечивает высокую точность измерения дальности при применении его в РЛС с высокой частотой повторения импульсов. Однако он не может применяться в РЛС, излучающей импульсы большой длительности с низкой частотой повторения. Способ требует излучения ряда импульсов, т.е. не является моноимпульсным, что ведет к увеличению времени обзора пространства.
Так же, как и выше приведенные способы, данный способ не решает проблемы снижения разрешающей способности и точности измерения дальности при перекрытии интервала зондирования и времени поступления отраженных импульсов.
Из всех изложенных выше способах обеспечения требуемой разрешающей способности по дальности для обнаружения целей на больших и меньших расстояниях более всего в качестве прототипа мог бы быть выбран первый способ (см. Теоретические основы радиолокации, учебник под ред. Ширмана Я.Д, стр. 120, 128, 135, «Войска ПВО страны», 1968 г). Этот способ является базовым для всех остальных, хотя в его описании отсутствуют такие необходимые для практической реализации узлы, как усилитель, модулятор, смеситель, генератор несущей частоты и т.п.
При использовании этого способа для поддержания одинаковой разрешающей способности и точности во всем диапазоне дальности можно было бы излучать ЗИ с фиксированной девиацией и с длительностью, соответствующей каждому каналу дальности (элементу разрешения). В этом случае число интервалов «излучение - прием» стало бы равным числу каналов дальности, значение которого может доходить до десятков и сотен тысяч. Соответственно, в такое же число возросла бы длительность периода обзора пространства, что делает нереальным использование такого способа.
Можно реализовать вариант, в котором весь диапазон дальности РЛС предварительно разбивается на ряд из трех - пяти участков дальности. Для просмотра участков организуются интервалы поочередного излучения и приема импульсов соответствующей длительности и с одинаковой девиацией частоты. Для самого дальнего участка используется ЗИ максимальной длительности. Для других участков используются более короткие зондирующие импульсы. Длительность каждого ЗИ берется, к примеру, равной ½ от длительности предыдущего ЗИ. В этом случае обеспечивается заданное значение разрешающей способности в середине каждого участка, а к краям участков она снижается на 1/3 (в данном примере), а в общем случае - до значения, определяемого количеством и расстановкой участков. При таком способе работы в РЛС сохраняется, хотя и снижается, неравномерность разрешающей способности по дальности. Введение же, кроме длинного интервала «излучение - прием», дополнительных более коротких интервалов, приводит к увеличению периода просмотра диапазона дальности не меньше, чем в 1,5-2 раза, что в свою очередь ведет к пропорциональному увеличению времени просмотра сектора ответственности РЛС, что является нежелательным, а иногда недопустимым ограничивающим фактором.
Кроме того, фильтрация, согласованная с зондирующим ЛЧМ сигналом, обеспечивает измерение дальности с ошибкой, вносимой доплеровским смещением несущей частоты. Устранение этой ошибки осуществляется путем нескольких измерений, вычисления скорости и уточнения расстояний при построении траектории. При этом затягивается процесс обнаружения и траекторией обработки.
В качестве прототипа наиболее близким по совокупности существенных признаков и достигаемому техническому эффекту является способ, обеспечивающий постоянную разрешающую способность по дальности и измерение радиальной скорости в импульсной радиолокационной станции с квазислучайной фазовой модуляцией - ФМ (см. «Способ обеспечения постоянной разрешающей способности по дальности в импульсной радиолокационной станции с квазислучайной фазовой модуляцией», патент РФ №2491572, кл. G01S 13/26, G01S 13/28, G01S 13/42, 10.09.2013, авторы Сабаев Л.В., Сабаев Д.Л., Капустин С.В.).
Этот способ обеспечивает измерение расстояния до целей во всем диапазоне дальности с постоянной разрешающей способностью без доплеровской ошибки и осуществляет одновременно измерение доплеровских смещений частоты отраженных сигналов. Недостатком этого способа является большой объем оборудования, необходимого для реализации устройства согласованной фильтрации в диапазоне доплеровских частот. Так, например, при фильтрации демодулированного сигнала длительностью до Ти=10 мс согласованный фильтр должен иметь полосу пропускания по уровню -3 дБ, равную 0,89/Ти=89 Гц. В доплеровском диапазоне, равном, например, 40 кГц, необходимо будет реализовать 450 фильтров. Как показано ниже, один согласованный фильтр сжатия может быть реализован на базе четырех микросхем ПЛИС Virtax-7, которые конструктивно размещаются в одном модуле стандарта ЕВРОМЕХАНИКА 6U. Таким образом, полная реализация доплеровского спектрального анализа фильтрами сжатия в одном приемном канале потребует значительного объема оборудования в 450 модулей в конструктиве 6U.
Недостатком этого способа является также увеличение ошибки измерения радиальной скорости при уменьшении расстояния до цели из-за уменьшения длительности ОИ и соответствующего расширения полосы доплеровских фильтров.
Целью изобретения являются:
- обеспечение постоянной разрешающей способности измерения расстояний до целей во всем диапазоне дальности путем излучении одного модулированного импульса и реализации согласованной фильтрации отраженных импульсов, длительность которых равна или меньше длительности зондирующего импульса;
- обеспечение измерения текущих значений расстояний до целей без доплеровских ошибок;
- обеспечение измерения текущих значений радиальных скоростей целей с методической ошибкой, независящей от расстояния до цели;
- сокращение объема вычислительного оборудования, реализующего согласованную фильтрацию отраженных импульсов.
Реализация этих целей достигается использованием предлагаемого ниже способа.
В способе-прототипе, заключающемся в излучении в цикле излучения одного ФМ импульса длительностью ТЗИ с полосой частоты модуляции Fдев и обработке в цикле приема отраженных от целей импульсов согласованным фильтром сжатия, для достижения поставленных целей согласно настоящему изобретению излучаемый импульс формируется в виде исходной цифровой последовательности комплексных отсчетов сигнала, дискретизированных с частотой Fф≥Fдев, и состоящей из отсчетов М элементарных ЛЧМ импульсов (ЭИ), следующих слитно друг за другом и имеющих одинаковую длительность ТЭИ=ТЗИ/М и одинаковую девиацию частоты FдевЭИmin≤FдевЭИ<Fдев, но разные псевдослучайные значения начальной частоты fλm, где λ - номер частоты из алфавита частот, λ=1÷М; m - порядковый номер ЭИ в последовательности ЭИ, m=1÷М; внутри каждого ЭИ отсчеты сигнала вычисляются по закону частотной модуляции в пределах изменения частоты от fλm до частоты fλm+FдевЭИ, эти отсчеты затем преобразуются в напряжение, которое пропускается через фильтр нижних частот, ограничивающий полосу частот модуляции полосой ΔFM≥Fдев, с выхода фильтра сигнал переносится на несущую частоту f0, усиливается по мощности и передается в антенну на излучение, принимаемые антенной отраженные импульсы усиливаются, фильтруются на несущей частоте f0 полосовым фильтром с полосой пропускания ΔFм, дискретизируются по времени с частотой Fд≥2ΔFм с обеспечением выполнения условия f0=nFд+ΔFм/2, n=1, 2, 3, …, и квантуются по уровню, затем действительные цифровые отсчеты сигнала путем цифрового квадратурного гетеродинирования переносятся на нулевую частоту, комплексные результаты гетеродинирования обрабатываются цифровым комплексным фильтром нижних частот с полосой пропускания ΔFм, на выходе фильтра формируются отсчеты с частотой следования Fс≥ΔFм, которые затем обрабатываются доплеровскими фильтрами сжатия, импульсные характеристики которых по длительности и по функции частотной модуляции согласованы с отраженным импульсом и настроены на заданные значения доплеровских частот, при этом задержка максимальной амплитуды сигнала на выходах фильтров, соответствует расстоянию до обнаруженной цели без доплеровской ошибки, а частота сигнала, измеренная дискриминаторным методом по двум или трем максимальным амплитудам в смежных фильтрах, соответствует доплеровскому смещению частоты цели, однозначно связанному с ее радиальной скоростью.
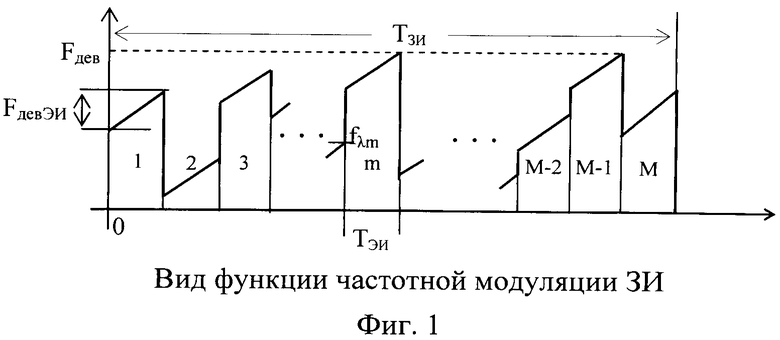
Для наглядного представления предлагаемого составного зондирующего импульса на фиг. 1 условно изображен график изменения частоты модуляции в таком ЗИ в пределах 0≤fЗИ≤Fдев, где:
- Fдев - полное значение девиации частоты в ЗИ;
- FдевЭИ - значение девиации частоты в ЭИ.
Очевидно, что для того, чтобы минимизировать энергетические потери при 


Таким образом, должно выполняться условие FдевЭИ≥εFдевЭИmin.
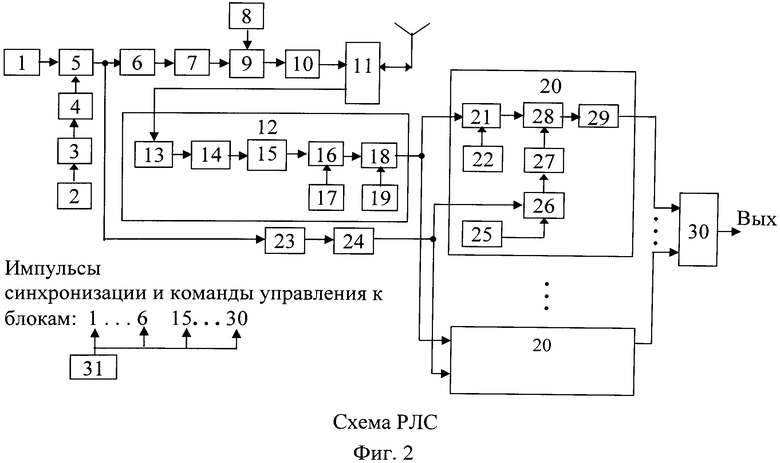
В качестве примера одного из возможных вариантов реализации этого способа на фиг. 2 приведена упрощенная блок-схема РЛС.
На фиг. 2 обозначено:
1 - цифровой генератор элементарных ЛЧМ-импульсов;
2 - генератор квазислучайных натуральных чисел (адресов ОЗУ начальных частот ЭИ);
3 - ОЗУ начальных частот ЭИ;
4 - генератор комплексной синусоиды начальной частоты ЭИ;
5 - умножитель комплексных чисел;
6 - цифро-аналоговый преобразователь (ЦАП);
7 - аналоговый фильтр нижних частот (ФНЧ);
8 - генератор несущей частоты;
9 - квадратурный модулятор;
10 - усилитель мощности;
11 - антенный переключатель;
12 - аналого-цифровой приемник;
13 - усилитель высокой частоты;
14 - полосовой фильтр;
15 - аналого-цифровой преобразователь (АЦП);
16 - умножитель;
17 - ОЗУ коэффициентов цифрового гетеродина;
18 - цифровой комплексный фильтр нижних частот (ЦФНЧ);
19 - ОЗУ коэффициентов ЦФНЧ;
20 - согласованный фильтр сжатия отраженного импульса;
21 - буферное ОЗУ входных отсчетов;
22 - счетчик адреса;
23 - буферное ОЗУ коэффициентов частотной модуляции;
24 - регистр сдвига;
25 - генератор комплексной синусоиды доплеровской частоты;
26 - умножитель комплексных чисел;
27 - ОЗУ весовых коэффициентов фильтра сжатия;
28 - умножитель комплексных чисел с накапливающим сумматором;
29 - детектор;
30 - блок сравнения с порогом, выбора максимальной и соседних амплитуд и вычисления дискриминационной оценки частоты;
31 - блок синхронизации и управления.
Работа РЛС происходит следующим образом.
До начала излучения в блоке 1 вычисляется вектор Х комплексных многоразрядных линейно-частотно-модулированных отсчетов ЗИ, которые описываются выражением (I):

где:
- x(n) - значение отсчета ЗИ в момент времени nТф, отсчитываемый от начала излучения до конца излучения;
- n - номер такта формирования ЗИ, отсчитываемый от начала излучения;
- Тф - такт формирования ЗИ, Тф=1/Fф;
- m - номер ЭИ, m=1÷М;
- ТЭИ - длительность ЭИ,
- FдевЭИ - значение девиации частоты модуляции в ЭИ;
- γ - скорость изменения частоты модуляции в ЭИ, γ=FдевЭИ/ТЭИ;
- NЗИ - число тактов формирования (число отсчетов) на интервале длительности ЗИ ТЗИ,
- Nнm - номер такта дискретизации, соответствующий началу m-го ЭИ, Nнm=NЭИ(m-1), где NЭИ - число отсчетов на длительности ЭИ, NЭИ=ТЭИFф.
Отсчеты х(n), вычисляемые в блоке 1 в пределах каждого ЭИ, перемножаются в блоке 5 с отсчетами v(n) комплексной синусоиды начальной частоты ЭИ, которые вырабатываются в генераторе 4 по значению начальной частоты, считываемому из ОЗУ 3 по адресу, формируемому генератором 2 квазислучайных адресов. Значения отсчетов вектора V начальной частоты описываются выражением:

где λ, - номер частоты из алфавита частот, λ=1÷М; m - порядковый номер ЭИ в последовательности ЭИ, m=1÷М.
В результате поэлементного перемножения векторов Х и V будет сформирован вектор ЗИ Z. После этого для обеспечения вычисления весовых коэффициентов фильтров сжатия комплексно-сопряженный вектор Z* переписывается в буферное ОЗУ 23.
На интервале излучения в дискретные моменты времени, отсчитываемые от начала излучения и задаваемые тактовыми импульсами блока 30 синхронизации и управления, значения кодов z(n) из умножителя 5 поступают на входы блока 6, содержащего два цифро-аналоговых преобразователя - косинусный и синусный. В блоке 6 коды отсчетов преобразуются в два напряжения, которые фильтруются двухканальным аналоговым фильтром 7 нижних частот (ФНЧ), формирующим полосу частот модуляции ΔFм≥Fдев. Сигналы модуляции от блока 7 поступают на два входа квадратурного модулятора 9, на третий вход которого от генератора 8 подается гармонический сигнал несущей частоты f0. На выходе модулятора несущий сигнал элементарного импульса будет иметь частотную модуляцию с квазислучайной начальной частотой. С выхода модулятора сигнал подается на усилитель мощности 10 и через антенный переключатель 11 поступает на излучение в антенну. Антенный переключатель 11 подключает антенну к выходу усилителя мощности 10 на время излучения и подключает антенну к входу приемника 12 на время приема.
Принимаемые антенной сигналы, отраженные от целей, через антенный переключатель 11 поступают в аналого-цифровой приемник 12, где они усиливаются в усилителе 13, фильтруются полосовым фильтром 14, полоса пропускания которого равна полосе частот модуляции ΔFм. Затем сигналы дискретизируются по времени с частотой Fд≥2ΔFм с обеспечением выполнения условия f0=nFд+ΔFм/2, n=1, 2, 3, …, необходимого для отсутствия эффекта наложения спектров, и квантуются по уровню в АЦП 15.
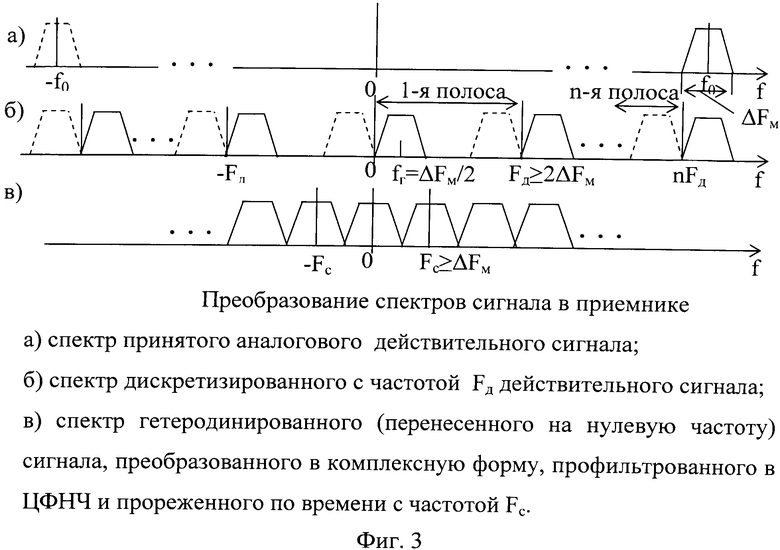
Для наглядности на фиг. 3 изображен характер преобразования спектров сигнала в приемнике.
Полученные в блоке 15 АЦП действительные отсчеты сигнала умножаются в блоке 16 на выборки комплексной синусоиды частоты, равной ΔFм/2, поступающие с частотой Fд из ОЗУ 17, выполняющим функцию цифрового гетеродина. Результаты умножения - квадратурные составляющие, подвергаются фильтрации в блоке 18 цифровым комплексным фильтром нижних частот с полосой пропускания ΔFм. Коэффициенты импульсной характеристики ЦФНЧ хранятся в ОЗУ 19 и подаются на вторые входы блока 18. На выходе ЦФНЧ формируются отсчеты u(n) с частотой Fc≥ΔFм в соответствии с полосой ЦФНЧ ΔFм и комплексной формой отсчетов.
Примечание. Здесь и далее номера временных отсчетов п называются каналами дальности или элементами разрешения по дальности.
Эти отсчеты передаются в доплеровские фильтры сжатия 20, где записываются в буферные ОЗУ 21, откуда они по кодам управления от счетчика адреса 22 считываются поочередно для каждого канала дальности и поступают на согласованную фильтрацию в умножитель 28 комплексных чисел с накапливающим сумматором. Число фильтров сжатия определяется заранее с учетом реального диапазона доплеровских частот. Фильтр сжатия на нулевой частоте реализуется всегда.
В каждом фильтре сжатия на интервале излучения из вектора Z* формируется вектор весовых коэффициентов WR для каждого R-го элемента дальности и заданного значения частоты настройки фильтра. Для этого вектор Z* считывается из буферного ОЗУ23. В регистре 24 вектор сдвигается влево на R элементов с их удалением. В конец вектора добавляются R нулей. Этим обеспечивается соответствие нового вектора 


где fфλm - это рассчитанное заранее заданное значение начальной частоты настройки фильтра, соответствующее λm-му ЭИ, в котором учитывается доплеровское смещение в зависимости от начального значения несущей частоты ЭИ и от заданного для данного доплеровского фильтра ожидаемого значения радиальной скорости цели.
В результате этих действий для каждого доплеровского фильтра сжатия будет получен массив векторов WR весовых коэффициентов фильтра по всем каналам (элементам разрешения) дальности. Этот массив записывается в ОЗУ 27 весовых коэффициентов соответствующего фильтра сжатия.
В каждом фильтре сжатия на выходе блока 28 формируются комплексные отсчеты отраженных сигналов по всем каналам дальности. Выходные отсчеты образуются путем вычисления свертки входных отсчетов ОИ с весовыми коэффициентами фильтра, сформированными с учетом длительности и вида функции модуляции сигналов, поступающих с ожидаемых рубежей дальности, а также с учетом заданного значения частоты настройки фильтра. В блоке 29 осуществляется детектирование сигналов во всех каналах дальности, т.е. вычисление модулей комплексных отсчетов сигналов.
На выходах каждого фильтра сжатия и детектора отсчеты отраженного импульса y(n) и s(n) формируются по формулам:

где:
- n - номер отсчета (номер канала дальности);
- u(n-1) - отсчет входного вектора ОИ;
- Wn(1) - отсчет весового вектора n-го элемента дальности;
По окончании NЗИ циклов на выходах каждого фильтра сжатия формируется вектор выходного амплитудного рельефа S=(s0÷SNзи-1).
Таким образом, в вычислениях участвуют только те весовые коэффициенты, которые соответствуют отсчетам сигнала, поступающим с соответствующей дальности, т.е. фильтр является адаптивным по отношению к обрабатываемым сигналам с разных дальностей.
От всех фильтров амплитуды передаются в блок 30, где проводится выделение амплитуд, превысивших заданный порог обнаружения. На плоскости «доплеровские фильтры - каналы дальности»" среди выделенных амплитуд отбираются локальные максимумы (ЛМ). В смежных с ЛМ доплеровских фильтрах в тех же каналах дальности выбираются амплитуды. Каждая такая совокупность амплитуд есть отражение от цели, находящейся на определенной дальности и имеющая определенную радиальную скорость.
Дальность до цели фиксируется по задержке ЛМ относительно начала приема, т.е. по номеру (n) временного отсчета пика.
Доплеровское смещение частоты Δf(n) вычисляется по амплитудам в двух (или трех) доплеровских фильтрах.
Алгоритм вычисления доплеровского смещения частоты fдопл(n) относительно нулевого значения по амплитудам в двух фильтрах с номерами i и (i+1) или (i-1) имеет вид:

где:
- i - номер доплеровского фильтра сжатия с ЛМ;
- γф - расстановка по частоте доплеровских фильтров сжатия;
- α - угол наклона дискриминационной характеристики;
- si(n)- амплитуда ЛМ в i-м доплеровском фильтре сжатия;
- si±1(n) - наибольшая амплитуда отсчета в одном из соседних (i±1)-м доплеровском фильтре сжатия.
Перед α, знак минус или плюс, устанавливается соответственно верхнему или нижнему индексу амплитуды в фильтре, который является соседом фильтра с ЛМ. Параметр α вычисляется заранее для каждого элемента дальности и хранится в виде массива констант.
Доплеровское смещение частоты fдопл(n) может вычисляться также по амплитудам в трех доплеровских фильтрах - в фильтре с ЛМ (i) и в фильтрах слева (i-1) и справа (i+1) (См., например, "Применение цифровой обработки сигналов" под ред. Э. Оппенгейма, изд. "Мир", М., 1980 г.):

При использовании этого алгоритма отсутствует необходимость в вычислении угла α наклона дискриминационной характеристики.
Таким образом, задержка полученной на выходе фильтра максимальной амплитуды сигнала относительно начала цикла приема соответствует расстоянию до обнаруженной цели, а значение частоты, измеренное по максимальным амплитудам в двух (или трех) разнесенных по частоте фильтрах, соответствует доплеровскому смещению частоты цели, однозначно связанному с ее радиальной скоростью.
На приводимых ниже графиках амплитудных рельефов и характеристик частотной избирательности по вертикальной оси отображаются относительные значения, вычисляемые в децибеллах по формуле: 
В подтверждение достижения поставленных целей при реализации данного способа было проведено моделирование с использованием системы Matlab.
При моделировании были взяты следующие исходные параметры:
- длительность ЗИ и интервал приема отраженных импульсов ТЗИ=10 мс, период повторения ЗИ ТП=2ТЗИ=20 мс;
- значение полной девиации частоты ЗИ Fдев=10 МГц;
- частота дискретизации ОИ и частота следования комплексных сигналов на выходе приемника Fд=Fc=12,5 МГц (такт Тс=80 нс);
- число элементарных ЛЧМ импульсов в ЗИ М=500;
- длительность ЭИ ТЭИ=ТЗИ/М, ТЭИ=20 мкс;
- значение девиации частоты ЭИ FдевЭИ=200 кГц;
- число каналов дальности NЗИ=ТЗИ Fc=125000.
За счет девиации частоты коэффициент сжатия сигнала (база сигнала) составила значение Б=ТЗИFдев=100000.
В согласованном фильтре отраженный импульс с длительностью ТОИ=10 мс сжимается до длительности Тсж=2ТЗИ/Б=200 нс. Это значение может являться оценкой разрешающей способности во всем диапазоне дальности.
Результаты моделирования представлены графиками амплитудных рельефов сигналов на выходах согласованных фильтров.
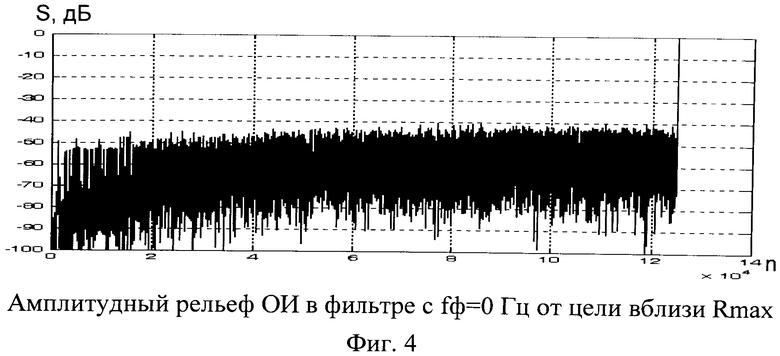
На фиг. 4 изображен амплитудный рельеф сжатого сигнала на выходе фильтра с нулевой частотой настройки (fф=0 Гц), отраженного от неподвижной цели, находящейся вблизи максимальной дальности (Rmax).
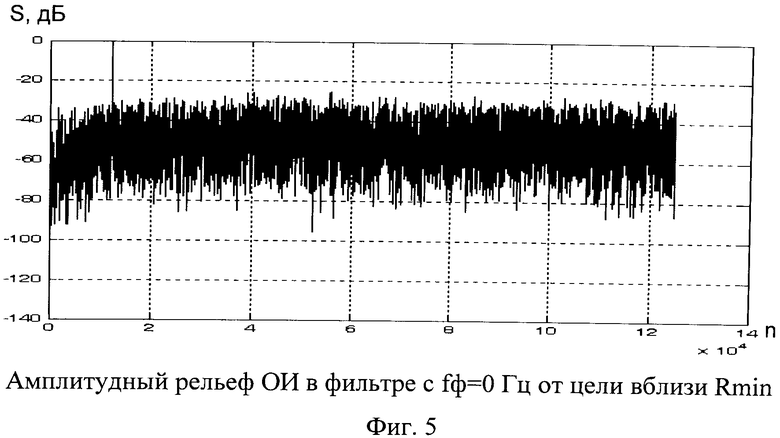
На фиг. 5 изображен амплитудный рельеф сигнала в том же фильтре от неподвижной цели, находящейся на ближней дальности. (Rmin).
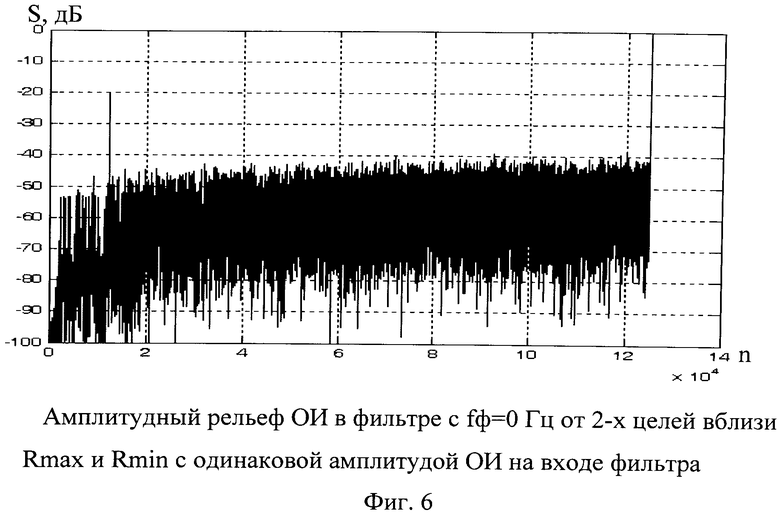
На фиг.6 изображен на выходе фильтра с fф=0 Гц рельеф двух сжатых ОИ от неподвижных целей, находящихся на ближней и максимальной дальности. Амплитуды обоих ОИ на входе фильтров сжатия были заданы одинаковыми. На выходе фильтра ближней дальности амплитуда сигнала, как и ожидалось, на 20 дБ меньше амплитуды сигнала с большей дальности за счет уменьшения в 10 раз длительности отраженного импульса и, соответственно такого же, уменьшения порядка фильтра.
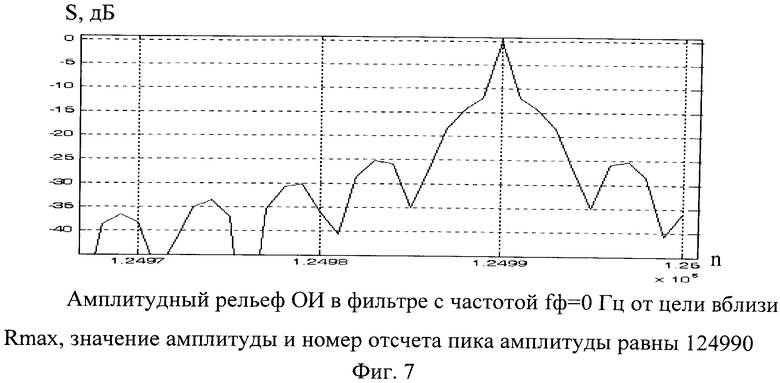
На фиг. 7 в увеличенном масштабе изображен рельеф ОИ от неподвижной цели вблизи максимальной дальности. Длительность импульса по уровню основания главного лепестка в -14 дБ составляет 2 отсчета частоты дискретизации, т.е. 160 нс. Номер отсчета канала дальности (пика амплитуды) равен 124990.
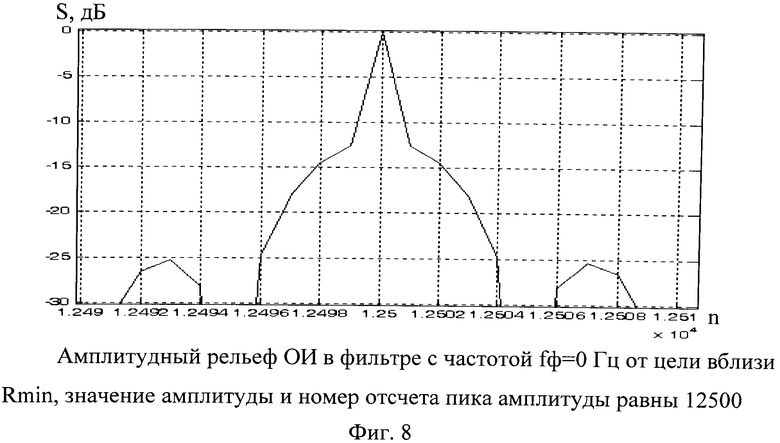
На фиг. 8 в увеличенном масштабе представлен рельеф ОИ от неподвижной цели на ближней дальности. Длительность импульса по уровню основания главного лепестка в -13 дБ также составляет 2 отсчета частоты дискретизации, т.е. 160 нс. Номер отсчета пика амплитуды равен 12500.
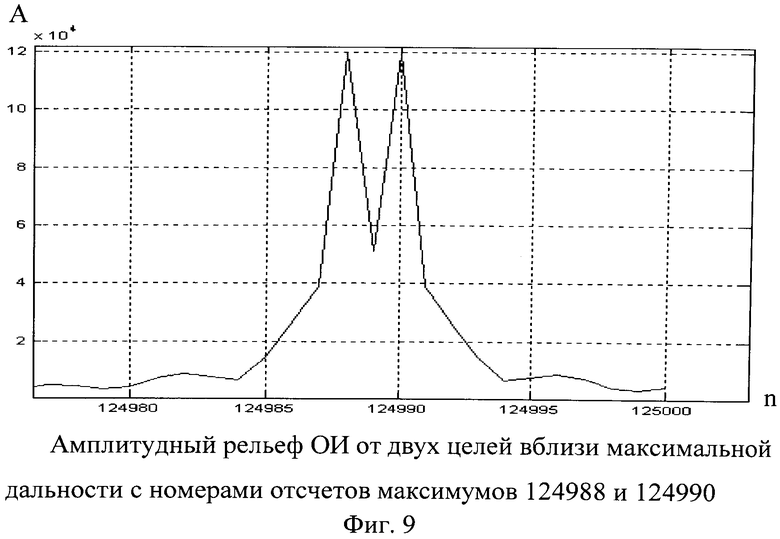
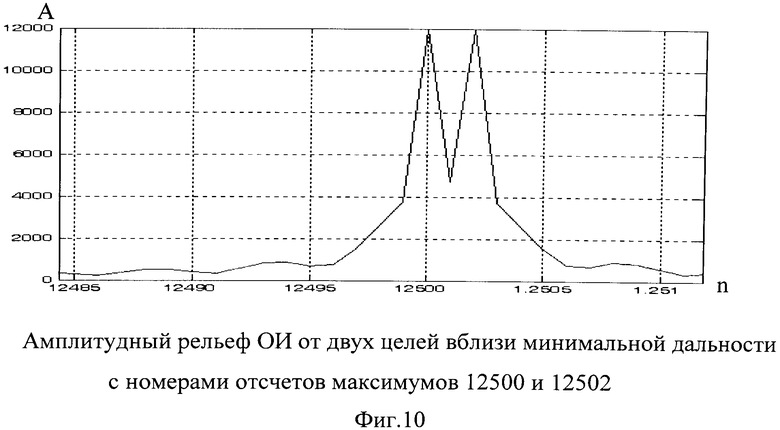
На фиг. 9 и 10 изображены рельефы сжатых ОИ от двух неподвижных целей, находящихся вблизи максимальной дальности, а также на ближней дальности, и разнесенных друг от друга по времени на 2 отсчета. Четко видны пики амплитуд, расстояние между которыми составляет 160 нс. Разрешающая способность по дальности определяется этим параметром, который имеет одинаковое значение на максимальном и минимальном расстояниях.
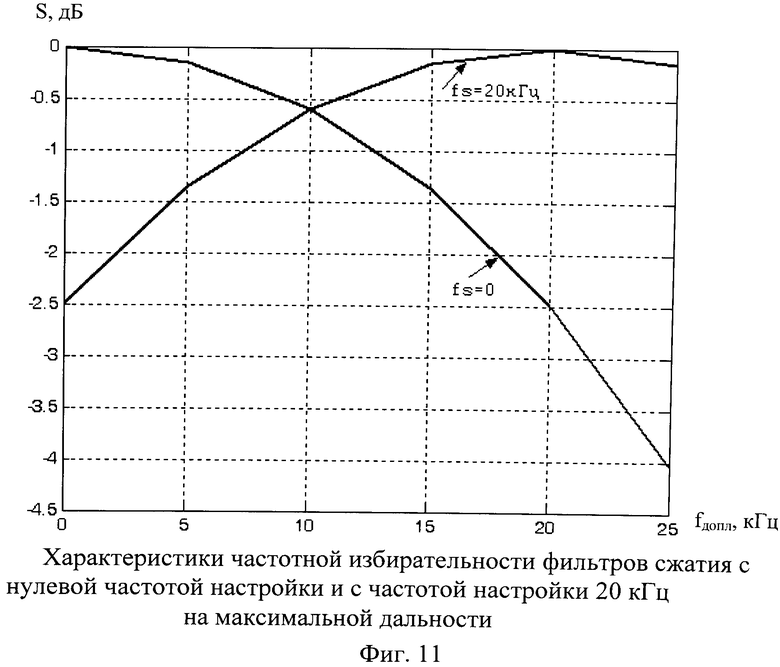
На фиг. 11 изображены характеристики частотной избирательности двух фильтров сжатия с нулевой частотой настройки и с частотой настройки 20 кГц, сформированные по сигналу, отраженному от цели с максимальной дальности в диапазоне положительных доплеровских частот от 0 до 25 кГц. Полная полоса каждого фильтра по уровню -2,5 дБ составляет 40 кГц.
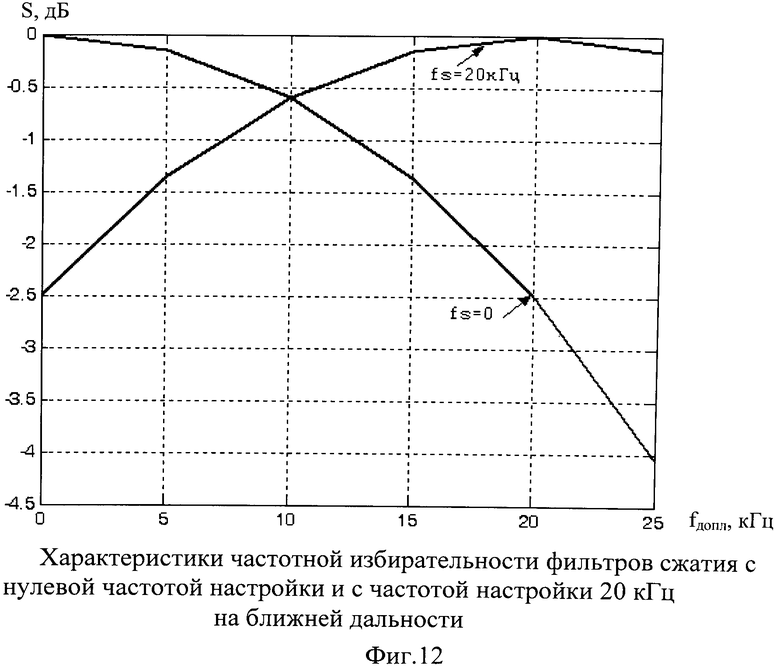
На фиг. 12 изображены характеристики частотной избирательности фильтра сжатия с нулевой частотой настройки и с частотой настройки 20 кГц при, сформированные по сигналу, отраженному от цели с ближней дальности в диапазоне положительных доплеровских частот от 0 до 25 кГц. Полная полоса каждого фильтра по уровню -2,5 дБ составляет 40 кГц.
Из графиков фиг. 11 и фиг. 12 видно, что характеристики частотной избирательности фильтров сжатия на максимальной и на ближней дальности практически полностью идентичны, что позволяет вычислять доплеровское смещение ОИ с одинаковой точностью независимо от расстояния до цели (при прочих равных условиях).
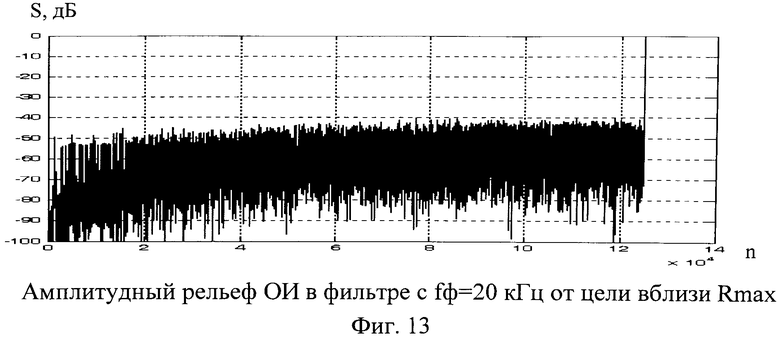
На фиг. 13 изображен амплитудный рельеф сжатого сигнала на выходе фильтра с частотой настройки fф=20 кГц, отраженного от цели, находящейся вблизи максимальной дальности (Rmax).
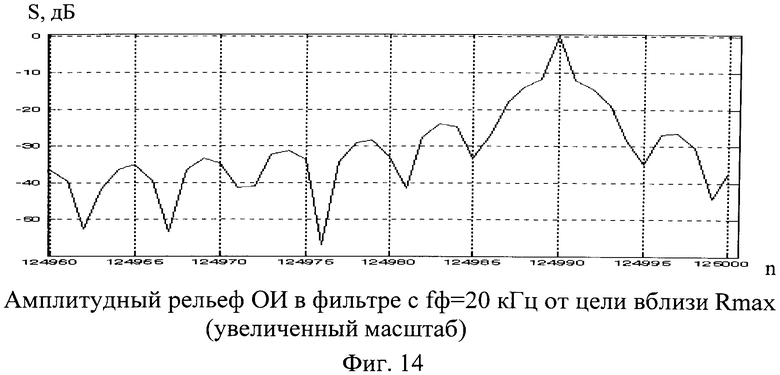
На фиг. 14 изображен тот же амплитудный рельеф в укрупненном масштабе около пика амплитуды. Видно, что сигнал выделился в том же канале дальности с номером отсчета пика амплитуды 124990, как это было и в фильтре с fф=0 Гц (см. фиг. 7).
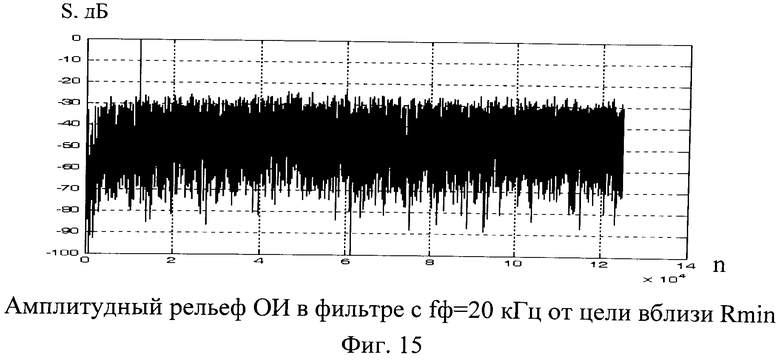
На фиг. 15 изображен амплитудный рельеф сжатого сигнала на выходе фильтра с частотой настройки fф=20 кГц, отраженного от цели, находящейся на ближней дальности (Rmin).
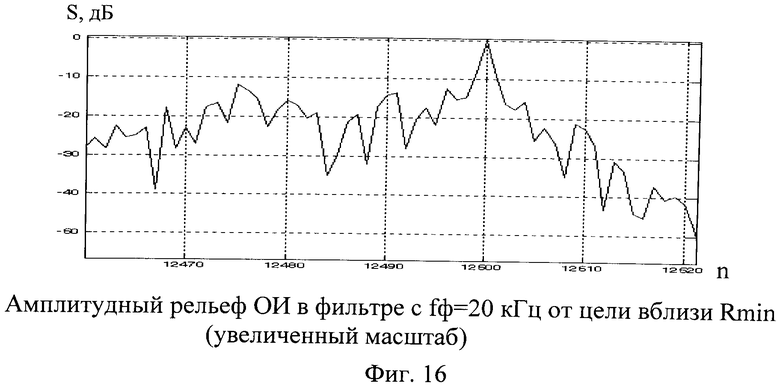
На фиг. 16 изображен тот же амплитудный рельеф в укрупненном масштабе около пика амплитуды. Видно, что сигнал выделился в том же канале дальности с номером отсчета пика амплитуды 12500, как это было и в фильтре с fф=0 Гц (см. фиг. 8).
Из графиков фиг. 13 ÷ фиг. 16 видно, что характеристики амплитудных рельефов ОИ при fф=20 кГц статистически идентичны характеристикам рельефов на выходе фильтров с нулевой частотой настройки.
Ниже приведена оценка технической реализации этого способа.
Оценена самая трудоемкая вычислительная процедура - согласованная фильтрация отраженных импульсов. Оценка выполнена при указанных выше параметрах сигнала и обработки:
длительность ЗИ ТЗИ=10 мс, период повторения ЗИ ТП=2ТЗИ=20 мс;
девиация частоты Fдев=10 МГц;
частота дискретизации Fд=12,5 МГц, такт Тд=80 нс;
число отсчетов в импульсе N=ТЗИFд=125000;
число каналов дальности Nд=N=125000;
диапазон доплеровских частот ΔFдопл=40 кГц: от -20 кГц до +20 кГц.
Число фильтров сжатия, как следует из результатов моделирования, составляет один фильтр (или 3 фильтра при реализации измерения доплеровской частоты) на весь диапазон доплеровских частот.
Число комплексных арифметических операций Q1 при вычислении амплитудного рельефа на выходе одного фильтра сжатия в дальней половине дальности в одной ДН за время ТП=20 мс составит:
Q1≈Nд*N/2=7812500000≈8*109 компл. оп.
Обработка может быть выполнена на программируемых интегральных микросхемах (ПЛИС), разработки фирм Altera или Xilinx (США). Так одна стандартная вычислительная ячейка в ПЛИС Virtax-7 XC7VSX1140T реализует с тактом t=5 не умножение двух действительных 16-разрядных чисел с подсуммированием. Для работы с комплексными числами используется группа из 4-х таких ячеек. Эти ячейки проведут Q1 вычислений за время T=Q1*t=40 с. Чтобы выполнить все вычисления за ТП=20 мс потребуется 40*103/20=2000 групп по 4 ячейки в группе, т.е. 8000 ячеек. Одна ПЛИС имеет 3360 ячеек. Таким образом, для вычисления амплитудных рельефов на дальней половине диапазона дальности потребуются 3 ПЛИС. На обслуживание первой половины дальности потребуется в четыре раза меньше оборудования, т.е. еще 1 ПЛИС.
Следовательно, для реализации одного фильтра сжатия в одном приемном канале без учета внешних связей, средств синхронизации, контроля и т.п., потребуется порядка 4 ПЛИС Virtax-7, которые с сопутствующими элементами конструктивно можно разместить в одном модуле стандарта ЕВРОМЕХАНИКА 6U. Соответственно для реализации трех или пяти доплеровских фильтров потребуется в 3 или в 5 раз больше такого оборудования.
Таким образом, результаты моделирования и оценки технической реализации показывают, что предлагаемый способ, заключающийся в формировании зондирующего составного квазислучайного ЛЧМ импульса и обработке отраженных импульсов, длительность которых меньше или равна длительности зондирующего импульса, согласованными фильтрами сжатия, обеспечивает обнаружение отраженных сигналов во всем диапазоне дальностей и доплеровских частот и измерение расстояний до целей с постоянной заданной разрешающей способностью без доплеровской ошибки независимо от местоположения целей по дальности, а также обеспечивает измерение текущих значений радиальных скоростей целей с методической ошибкой, независящей от расстояния до цели. При этом по сравнению с прототипом достигается сокращение объема вычислительного оборудования, реализующего согласованную фильтрацию отраженных импульсов.
Изобретение относится к радиолокационной технике и может быть использовано для обнаружения и измерения расстояний и измерения радиальных скоростей. Достигаемый технический результат - обеспечение постоянной разрешающей способности измерения расстояний до целей. Указанный результат достигается за счет того, что в способе осуществляется одновременное измерение радиальных скоростей целей с одинаковой методической точностью во всем диапазоне дальности при излучении одного модулированного импульса и при приеме отраженных импульсов, длительность которых может быть меньше длительности зондирующего импульса. Исходный зондирующий импульс формируется в виде цифровых отсчетов слитной последовательности большого числа коротких элементарных линейно-частотно-модулированных импульсов, имеющих одинаковую длительность и девиацию частоты, но разные псевдослучайные значения начальной частоты. Принимаемые антенной отраженные импульсы усиливаются, фильтруются фильтром, дискретизируются по времени и квантуются по уровню аналого-цифровым преобразователем. Сформированные отсчеты переносятся на нулевую частоту путем цифрового квадратурного гетеродинирования комплексной синусоидой с определенной частотой. Результаты гетеродинирования фильтруются цифровым квадратурным фильтром нижних частот (ЦФНЧ). Отсчеты на выходе ЦФНЧ формируются с определенной частотой и затем обрабатываются фильтрами сжатия, импульсные характеристики которых настроены на заданные значения доплеровских частот. Задержка максимальной амплитуды сигнала на выходах фильтров соответствует расстоянию до обнаруженной цели без доплеровской ошибки, а частота сигнала, измеренная дискриминаторным методом по максимальным амплитудам в двух или трех смежных фильтрах с одинаковой методической точностью во всем диапазоне дальности, соответствует доплеровскому смещению частоты цели, однозначно связанному с ее радиальной скоростью. 16 ил.
Способ измерения в радиолокационных устройствах расстояний до целей с постоянной разрешающей способностью по дальности во всем диапазоне дальности без доплеровской ошибки и измерение радиальных скоростей целей с одинаковой методической точностью во всем диапазоне дальности, заключающийся в излучении в цикле излучения одного ЛЧМ импульса длительностью ТЗИ с девиацией частоты Fдев и обработке отраженных от целей импульсов в цикле приема согласованным фильтром сжатия, отличающийся тем, что излучаемый импульс формируется в виде исходной цифровой последовательности комплексных отсчетов, дискретизированных с частотой Fф>Fдев, и состоящей из отсчетов М элементарных ЛЧМ импульсов (ЭИ), следующих слитно друг за другом и имеющих одинаковую длительность ТЭИ=ТЗИ/М и одинаковую девиацию частоты Fдевmin≤FдевЭИ≤Fдев, но разные псевдослучайные значения начальной частоты fλm, где λ - номер частоты из алфавита частот, λ=1÷М; m - порядковый номер ЭИ в последовательности ЭИ, m=1÷М; внутри каждого ЭИ отсчеты сигнала вычисляются по закону частотной модуляции в пределах изменения частоты от fλm до частоты fλm+FдевЭИ, эти отсчеты затем преобразуются в напряжение, которое пропускается через фильтр нижних частот, ограничивающий полосу частот модуляции полосой ΔFм≥Fдев, с выхода фильтра сигнал переносится на несущую частоту f0, усиливается по мощности и передается в антенну на излучение, принимаемые антенной отраженные импульсы усиливаются, фильтруются на несущей частоте f0 полосовым фильтром с полосой пропускания ΔFм, дискретизируются по времени с частотой Fд≥2ΔFм с обеспечением выполнения условия f0=nFд+ΔFм/2, n=1, 2, 3, … и квантуются по уровню, затем действительные цифровые отсчеты сигнала путем цифрового квадратурного гетеродинирования переносятся на нулевую частоту, комплексные результаты гетеродинирования обрабатываются цифровым комплексным фильтром нижних частот с полосой пропускания ΔFм, на выходе фильтра формируются отсчеты с частотой следования Fc≥ΔFм, которые затем обрабатываются фильтрами сжатия, импульсные характеристики которых по длительности и по функции частотной модуляции согласованы с отраженным импульсом и настроены на заданные значения доплеровских частот, при этом задержка максимальной амплитуды сигнала на выходах фильтров соответствует расстоянию до обнаруженной цели без доплеровской ошибки, а частота сигнала, измеренная дискриминаторным методом по двум или трем максимальным амплитудам в смежных фильтрах, имеет одинаковую методическую точность во всем диапазоне дальности и соответствует доплеровскому смещению частоты цели, однозначно связанному с ее радиальной скоростью.

