Изобретение относится к области радиолокации и может быть использовано в бортовых радиолокационных станциях (БРЛС) для формирования радиолокационного изображения (РЛИ) поверхности Земли.
Известен «Способ формирования радиолокационного изображения в радиолокационной станции с синтезированной апертурой антенны» [RU2632898, опубликовано 11.10.2017, МПК G01S13/89]. Способ заключается в зондировании, приеме, запоминании эхо-сигналов, определении момента начала зондирования, построении двумерной матрицы путем построчного с момента начала зондирования считывания отсчетов запомненного эхо-сигнала, сжатии двумерной матрицы по дальности и азимуту. Дополнительно во время запоминания принятого эхо-сигнала в моменты начала зондирования осуществляют вставку пауз длительностью τи путем его амплитудной манипуляции, а во время определения момента начала зондирования осуществляют интегрирование абсолютного значения запомненного сигнала в пределах скользящего окна, представляющего собой временной строб с длительностью τи и изменяющимся временным смещением от нулевого значения, соответствующего началу запоминания эхо-сигнала, до значения, равного периоду зондирования. Определяют временное положение минимума полученного интеграла, который соответствует моменту начала зондирования.
Известен «Способ разрешения целей по дальности радиолокационной станцией и импульсная радиолокационная станция со сжатием импульсов и восстановлением сигналов» [RU2296345, опубликовано 27.03.2007, МПК G01S13/08]. Способ заключается в том, что передающая антенна станции излучает сложные зондирующие сигналы с внутриимпульсной частотной модуляцией или фазовой манипуляцией, генерируемые передатчиком. Приемная антенна станции принимает отраженные сигналы, в приемном тракте на каждом периоде повторения импульсов производится фильтрация принятых сигналов в согласованном фильтре, согласованном с зондирующим сигналом, в обнаружителе принимается решение об обнаружении сигналов и в вычислителе производится определение дальности до цели. До обнаружения сигнала на каждом периоде повторения импульсов дополнительно к согласованной фильтрации после сжатия импульса производится восстановление сигнала восстанавливающим фильтром.
Известен способ формирования радиолокационного изображения поверхности Земли при картографировании в режиме синтезирования апертуры антенны - [Многофункциональные радиолокационные системы под ред. Б.Г. Татарского. М.: ООО «Дрофа», 2007 г., стр. 174-190, рис. 7.9,7.10]. Способ формирования радиолокационного изображения поверхности Земли бортовой радиолокационной станцией, заключается в том, что излучают зондирующий импульсный сигнал в направлении земной поверхности, принимают отраженный от земной поверхности сигнал, стробируют по дальности, когерентно накапливают принятый сигнал в комплексном виде. Далее осуществляют сжатие сигнала по дальности. В данном примере алгоритм сжатия реализован обработкой накопленного сигнала согласованным фильтром [Многофункциональные радиолокационные системы под ред. Б.Г. Татарского. М.: ООО «Дрофа», 2007 г., стр. 188, рис. 7.10]. Затем осуществляют весовую обработку сжатого сигнала, определяют и компенсируют фазовый набег сигнала. Затем осуществляют спектральный анализ сигнала, в данном случае осуществляют быстрое преобразование Фурье, позволяющее сформировать элементы разрешения по азимуту. А затем формируют амплитуды радиолокационного изображения в виде двумерного массива из элементов разрешения по азимуту и по дальности.
Недостатком указанных способов является малый динамический диапазон формируемого радиолокационного изображения из-за высокого уровня боковых лепестков сжатого принятого сигнала и высокого уровня сигналов, отраженных от объектов, находящихся на кратной дальности (через период неоднозначности).
Наиболее близким по технической сущности является «Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией» [RU2717256, опубликовано 19.03.2020, МПК G01S15/89], заключающийся в том, что излучают фазомодулированные импульсные сигналы в направлении земной поверхности, принимают отраженные импульсные сигналы, преобразуют принятые импульсные сигналы в комплексные сигналы, стробируют по дальности принятые импульсные комплексные сигналы. Далее когерентно накапливают принятые импульсные комплексные сигналы, формируют комплексные спектры каждого накопленного импульсного комплексного сигнала и сигнала, модулирующего излучаемый сигнал, быстрым преобразованием Фурье, определяют модуль комплексного спектра сигнала, модулирующего излучаемый сигнал, нормируют комплексный спектр каждого накопленного импульсного комплексного сигнала на квадрат модуля комплексного спектра сигнала, модулирующего излучаемый сигнал, по формуле
 где
где  комплексный спектр накопленного импульсного комплексного сигнала,
комплексный спектр накопленного импульсного комплексного сигнала,  комплексный спектр модулирующего сигнала,
комплексный спектр модулирующего сигнала,  - нормированный спектр.
- нормированный спектр.
Затем формируют нормированные комплексные сигналы преобразованием каждого нормированного спектра во временную область обратным быстрым преобразованием Фурье, осуществляют их сжатие, затем по сжатым сигналам определяют и компенсируют фазовый набег за период повторения сигнала, проводят спектральный анализ скомпенсированного сигнала в каждом стробе дальности, формируют амплитуды радиолокационного изображения.
Недостатком указанного способа является малый динамический диапазон формируемого радиолокационного изображения. Этот недостаток возникает из-за высокого уровня побочных составляющих сжатых сигналов, которые могут накладываться на основные лепестки сжатого сигнала и тем самым их маскировать. Побочные составляющие сжатых сигналов состоят из их боковых лепестков и сигналов, отраженных от объектов, находящихся на кратной дальности (через период неоднозначности). Малый динамический диапазон РЛИ приводит к снижению вероятности обнаружения объектов на формируемом радиолокационном изображении, особенно объектов с малым уровнем отраженного сигнала. Также данный способ невозможно применить с радиолокационными ЛЧМ сигналами, а только с ФКМ сигналами.
Технической проблемой решаемой предлагаемым изобретением является создание способа формирования БРЛС радиолокационного изображения земной поверхности с широким динамическим диапазоном.
Техническим результатом предлагаемого изобретения является расширение динамического диапазона формируемого РЛИ за счет снижения уровня побочных составляющих сжатого ЛЧМ импульсного сигнала путем уменьшения уровня его боковых лепестков и подавления сигналов, принятых с кратных дальностей (через период неоднозначности).
Сущность предлагаемого изобретения заключается в том, что излучают импульсные сигналы в направлении земной поверхности, принимают отраженные импульсные сигналы, когерентно накапливают принятые импульсные сигналы, осуществляют сжатие сигналов и формируют амплитуды радиолокационного изображения.
Новым в заявляемом способе является то, что перед излучением формируют последовательность из когерентных ЛЧМ импульсных сигналов с одинаковой девиацией частоты, изменяя значение средней частоты каждого ЛЧМ импульсного сигнала последовательности по случайному закону, а излучение сформированной последовательности ЛЧМ импульсных сигналов в направлении земной поверхности осуществляют когерентно в процессе радиолокационного обзора земной поверхности. После приема ЛЧМ импульсных сигналов осуществляют их аналого-цифровое преобразование с частотой FД≥2Δƒ, где Δƒ - девиация частоты ЛЧМ импульсного сигнала. После завершения накопления ЛЧМ импульсных сигналов в цифровом виде, последовательно осуществляют их сжатие и согласованную обработку, а амплитуды радиолокационного изображения формируют путем детектирования обработанных ЛЧМ импульсных сигналов. Значение средней частоты изменяют по случайному закону с равномерным распределением. Последовательность ЛЧМ импульсных сигналов формируют путем цифрового синтеза сигнала. Согласованная обработка накопленных ЛЧМ импульсных сигналов осуществляется путем гармонического анализа.
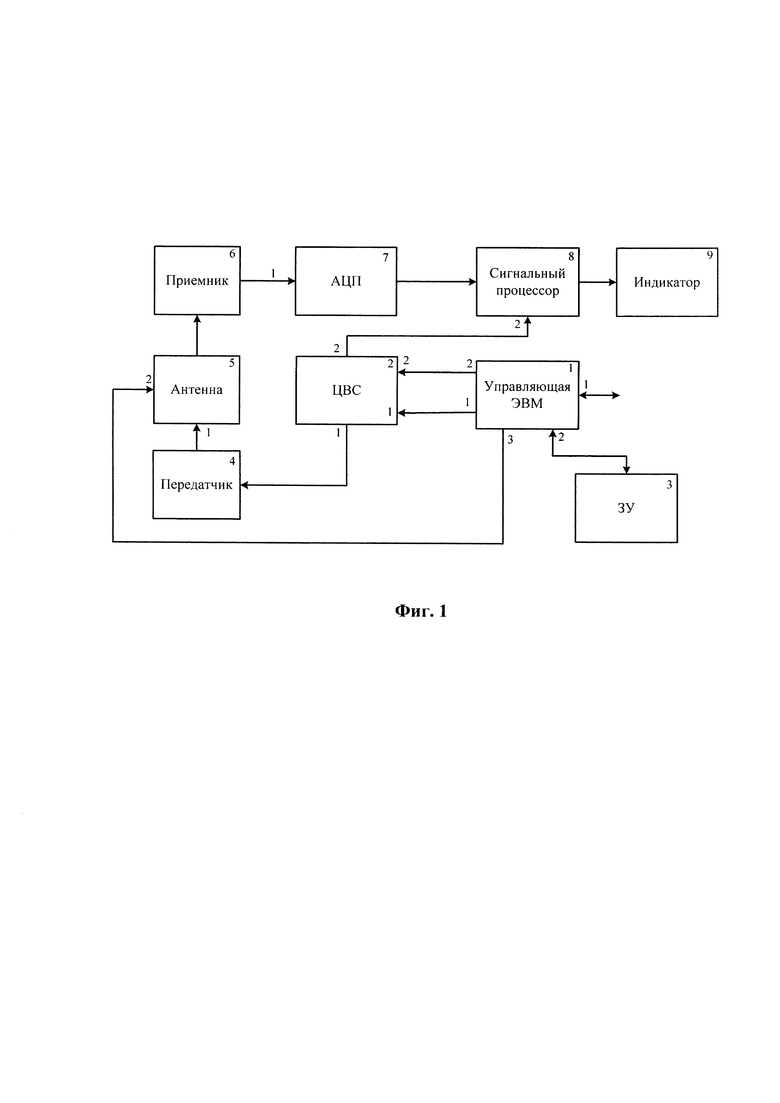
На Фиг. 1 представлена функциональная схема бортовой радиолокационной станции, осуществляющей способ.
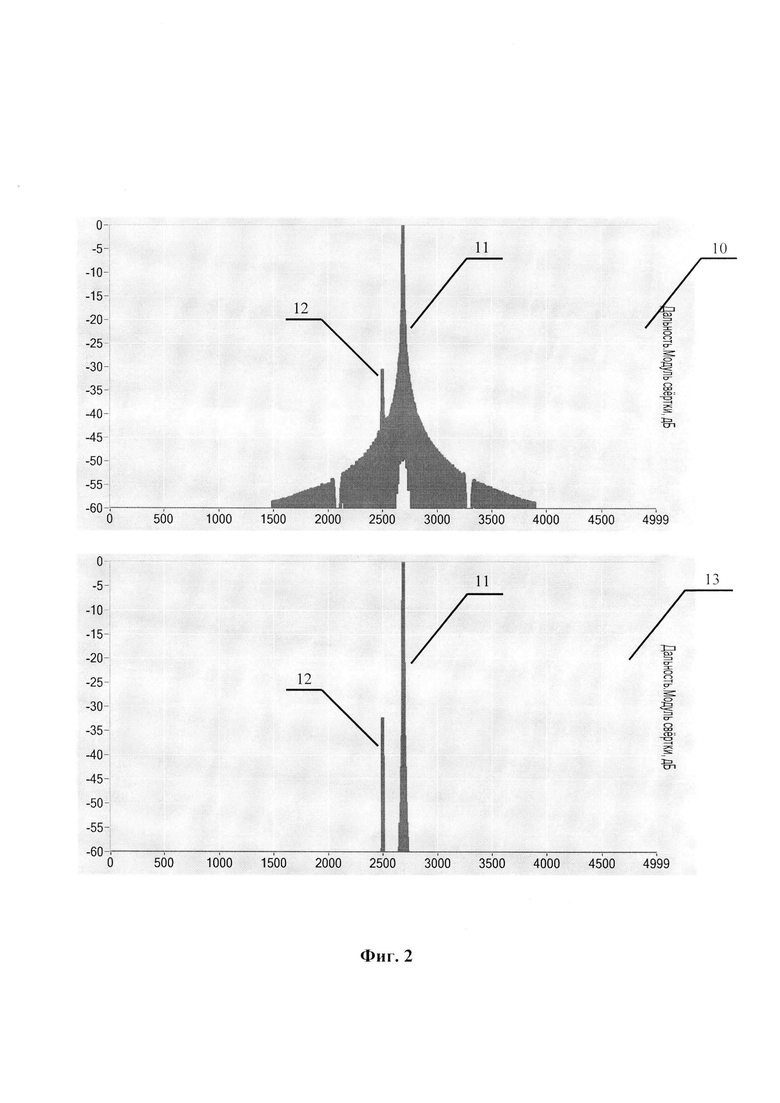
На Фиг. 2 представлены графики, обработанных ЛЧМ импульсных сигналов по способу прототипа и по заявляемому способу, отраженных от двух наземных объектов.
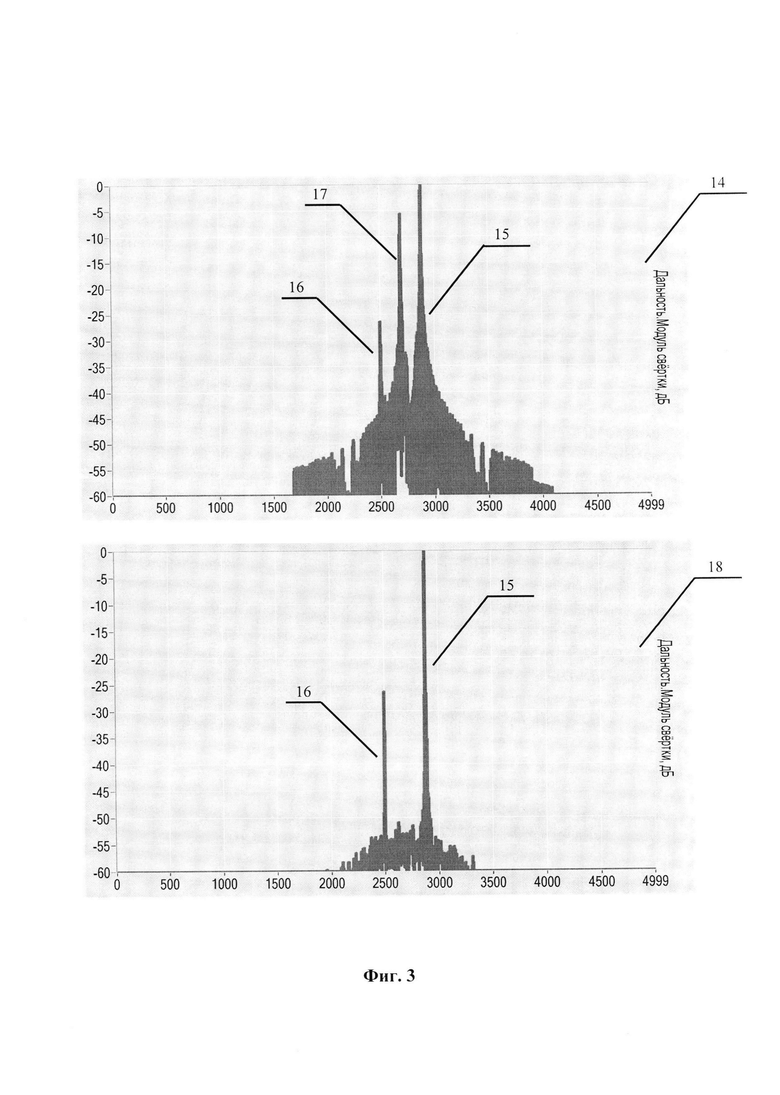
На Фиг. 3 представлены графики, обработанных ЛЧМ импульсных сигналов по способу прототипа и по заявляемому способу, отраженных от двух наземных объектов и сигнала принятого с кратной дальности, отраженного от объекта, расположенного вне зоны приема.
Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией может быть реализован, например, в БРЛС, состоящей из управляющей ЭВМ (1), цифрового вычислительного синтезатора (ЦВС) (2), запоминающего устройства (ЗУ) (3), передатчика (4), антенны (5), приемника (6), АЦП (7), сигнального процессора (8), индикатора (9). Первый вход-выход управляющей ЭВМ (1) является внешним входом-выходом БРЛС. Первый выход управляющей ЭВМ (1) соединен с первым входом ЦВС (1), второй выход управляющей ЭВМ (1) соединен со вторым входом ЦВС (2), третий выход управляющей ЭВМ (1) соединен со вторым входом антенны (5), а ко второму входу-выходу управляющей ЭВМ (1) подключен вход-выход ЗУ (3). Первый выход ЦВС (1) подключен к входу передатчика (4), выход которого подключен к первому входу антенны (5). Выход антенны (5) подключен к входу приемника (6). Выход приемника (6) подключен к входу АЦП (7), выход которого подключен к первому входу сигнального процессора (8). Второй вход сигнального процессора (8) подключен ко второму выходу ЦВС (2). Выход сигнального процессора (8) подключен к входу индикатора (9).
Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией осуществляется следующим образом.
В процессе работы бортовой радиолокационной станции управляющая ЭВМ (1) задает со своего третьего выхода параметры управления антенне (5) для просмотра соответствующей зоны обзора. Антенна (5) формирует диаграмму направленности антенны (ДНА) и направляет ее на участок земной поверхности в соответствии с заданными параметрами. Так же управляющая ЭВМ (1) со своего первого выхода выдает команду цифровому вычислительному синтезатору (ЦВС) (2), по которой он начинает формировать последовательность из М ЛЧМ импульсных сигналов, где М целое число. Количество импульсных сигналов М подбирается заранее, исходя из параметров БРЛС и требуемого разрешения РЛИ по азимуту, например по соотношению:
 , где ΔθАЗ - ширина ДНА БРЛС по азимуту, δθАЗ - требуемая (заданная) разрешающая способность РЛИ.
, где ΔθАЗ - ширина ДНА БРЛС по азимуту, δθАЗ - требуемая (заданная) разрешающая способность РЛИ.
При ширине луча ΔθАЗ=2° и требуемом разрешении δθАЗ=0.002° количество импульсов М=2000. Для удобства реализации аппаратурой и дальнейшей цифровой обработки число М можно увеличить до числа степени двойки М=2048 импульсных сигналов.
Управляющая ЭВМ (1) со своего второго выхода, задает цифровому вычислительному синтезатору (2) значение девиации частоты Δƒ ЛЧМ импульсных сигналов и набор из М значений средней частоты ƒCP ЛЧМ импульсных сигналов, считывая их из запоминающего устройства (ЗУ) (3). Набор из М значений средней частоты ƒCP ЛЧМ импульсных сигналов формируют заранее по заданному случайному закону, например закону с равномерным распределением, и записывают через управляющую ЭВМ (1) в ЗУ (3), которое может быть отдельным функциональным блоком, как в схеме, представленной на Фиг. 1, или входить в состав управляющей ЭВМ (1). Значение средней частоты ƒCP выбирают в диапазоне [ƒ0 - δƒ, ƒ0+δƒ], где  ƒ0 - среднее значение диапазона частот, соответствующее средней частоте полосы приемо-передающего тракта БРЛС, ΔƒС - ширина спектра ЛЧМ импульсного сигнала. Также управляющая ЭВМ (1) задает ЦВС (2) другие параметры сигналов - длительность импульсного сигнала ТИ, период повторения импульсного сигнала ТП.
ƒ0 - среднее значение диапазона частот, соответствующее средней частоте полосы приемо-передающего тракта БРЛС, ΔƒС - ширина спектра ЛЧМ импульсного сигнала. Также управляющая ЭВМ (1) задает ЦВС (2) другие параметры сигналов - длительность импульсного сигнала ТИ, период повторения импульсного сигнала ТП.
ЦВС (2) формирует последовательность когерентных ЛЧМ импульсных сигналов с периодом повторения ТП путем прямого цифрового синтеза сигнала и со своего выхода передает их на вход передатчика (4). В передатчике (4) осуществляют усиление и повышение частоты ЛЧМ импульсных сигналов, а затем в процессе обзора земной поверхности антенной (5) осуществляет когерентное излучение ЛЧМ импульсных сигналов.
Отраженный от земной поверхности импульсный радиолокационный сигнал принимается антенной (5), и с выхода антенны (5), сигнал поступает на вход приемника (6).
Отраженные сигналы последовательно когерентно принимают приемником (6). При приеме отраженного от земной поверхности сигнала происходит прием не только сигнала, соответствующего излученному, но и сигналов отраженных с кратных дальностей, соответствующих предыдущим излученным импульсным сигналам, и являющихся помеховыми по отношению к сигналу, принятому с основной дальности. При приеме таких сигналов центральным лепестком диаграммы направленности антенны их амплитуда сопоставима с амплитудой полезного сигнала, даже при модуляции диаграммой направленности антенны, что снижает динамический диапазон формируемого РЛИ по способам приведенных аналогов и прототипа. Далее будет показано подавление этих побочных составляющих в процессе формирования РЛИ.
Далее в АЦП (7) осуществляют аналого-цифровое преобразование сигнала с частотой дискретизации FД≥2Δƒ со стробированием по элементам дальности. А в сигнальном процессоре (8) когерентно накапливают принятые отраженные ЛЧМ импульсные сигналы в цифровом виде и далее осуществляют их сжатие по дальности. При этом цифровые сигналы можно сформировать в виде массива комплексных амплитуд  где m - номер импульсного сигнала из М, k - номер элемента дальности. Процесс излучения/приема ЛЧМ импульсных сигналов осуществляют в ходе радиолокационного обзора лучом ДНА земной поверхности. По окончании обзора завершается когерентное накопление сигнала в сигнальном процессоре (8).
где m - номер импульсного сигнала из М, k - номер элемента дальности. Процесс излучения/приема ЛЧМ импульсных сигналов осуществляют в ходе радиолокационного обзора лучом ДНА земной поверхности. По окончании обзора завершается когерентное накопление сигнала в сигнальном процессоре (8).
В сигнальном процессоре (8) осуществляют сжатие каждого из М накопленных ЛЧМ импульсных сигналов по дальности и формируют массив сжатого сигнала  . Сжатие можно осуществить, например, прямой сверткой принятых импульсных сигналов с опорной функцией для каждого периода повторения ТП (корреляционной обработкой), описанной в источниках [Многофункциональные радиолокационные системы / под ред. Б.Г. Татарского, М.: «Дрофа», 2007 г., стр. 41-68] или [Радио/технические цепи и сигналы, СИ. Баскаков, М.: «Высшая школа», 2010 г., стр. 423-430].
. Сжатие можно осуществить, например, прямой сверткой принятых импульсных сигналов с опорной функцией для каждого периода повторения ТП (корреляционной обработкой), описанной в источниках [Многофункциональные радиолокационные системы / под ред. Б.Г. Татарского, М.: «Дрофа», 2007 г., стр. 41-68] или [Радио/технические цепи и сигналы, СИ. Баскаков, М.: «Высшая школа», 2010 г., стр. 423-430].
Опорной функцией является соответствующий принятому сигналу - импульсный сигнал, сформированный ЦВС (2) для излучения, и поступающий с его второго выхода на второй вход сигнального процессора (8).
Далее осуществляют согласованную обработку М накопленных ЛЧМ импульсных сигналов по азимуту. Согласованная обработка может быть реализована различными способами: прямой сверткой, быстрой сверткой, гармоническим анализом и другими способами, описанными в литературе, например, в монографии [Многофункциональные радиолокационные системы / под ред. Б.Г. Татарского. М.: ООО «Дрофа», 2007 г., стр. 263-272]. Далее поясним согласованную обработку на примере гармонического анализа.
Согласованная обработка сигнала заключается в следующем. Поскольку ранее было осуществлено аналого-цифровое преобразование сигнала сжатые в процессоре сигналов (8) ЛЧМ импульсные сигналы представлены в виде массива цифровых отсчетов по элементам дальности (столбцов) для каждого периода повторения ТП (строки). В сигнальном процессоре (8) считывают М отсчетов для каждого элемента дальности по периодам повторения. Отсчеты умножают на опорную функцию, необходимую для компенсации траекторных нестабильностей вызванных движением носителя бортовой радиолокационной станции, например по соотношениям, приведенным в источнике [Многофункциональные радиолокационные системы / под ред. Б.Г. Татарского. М.: ООО «Дрофа», 2007 г., стр. 269]. Выбор зависит от порядка компенсируемых траекторных нестабильностей. Для компенсации траекторных нестабильностей второго порядка опорная функция h(t,θH) может быть представлена по формуле:
 где
где
t - отсчет времени, θН - азимут центра зоны обзора, W(t) - весовая функция, V - скорость носителя БРЛС, λ - длина волны, DH - наклонная дальность, j - мнимая единица.
После перемножения осуществляют М-точечное преобразование Фурье отсчетов сигнала. При выполнении преобразования Фурье, например Быстрого преобразования Фурье, осуществляется когерентное суммирование М отсчетов сжатых сигналов , при этом ширина главного лепестка сжатого сигнала неизменна для всех импульсов, а его амплитуда при суммировании растет линейно, при этом боковые лепестки формируются за счет суммирования со случайной фазой, что обусловлено случайным изменением средней частоты каждого ЛЧМ импульсного сигнала от периода к периоду повторения ТП. При согласованной обработке аналогичным образом происходит суммирование сигналов, принятых с кратных дальностей со случайной фазой, что приводит к их подавлению. Таким образом, осуществляется уменьшение уровня боковых лепестков сжатого ЛЧМ импульсного сигнала и подавление сигналов, принятых с кратных дальностей, и формируется сигнал  где i - отсчет по азимуту, k - отсчет по дальности.
где i - отсчет по азимуту, k - отсчет по дальности.
Далее осуществляют формирование амплитуд яркости радиолокационного изображения детектированием комплексных сигналов  .
.
Детектирование осуществляют в сигнальном процессоре (8) как корень квадратный из суммы квадратов действительной (Re) и мнимой (Im) частей комплексных амплитуд по соотношению:

Далее сформированный массив амплитуд АРЛИ[i,k] выводится на индикатор в виде уровней яркости РЛИ.
На Фигуре 2 показаны графики амплитуд РЛИ по способу прототипа и заявляемому способу для двух наземных объектов. На первом графике (10) показаны амплитуды принятых сигналов от двух наземных объектов. Амплитуда первого сигнала (11) высокая, а амплитуда второго сигнала (12) на уровне боковых лепестков первого сигнала (11) 30-35 дБ, что приводит к малому динамическому диапазону РЛИ. На втором графике (13) с формированием РЛИ по заявляемому способу - боковые лепестки первого сигнала (11) подавлены до уровня 50-60 дБ что, соответственно, расширяет динамический диапазон РЛИ, и второй объект (второй сигнал (12)) будет обнаружен с высокой вероятностью.
На Фигуре 3 показаны графики амплитуд РЛИ по способу прототипа и заявляемому способу для двух наземных объектов и сигнала принятого с кратной дальности (через период неоднозначности). На первом графике (14) показаны амплитуды принятых сигналов (15), (16) отраженных от наземных объектов и амплитуда сигнала (17), принятого с кратной дальности от объекта, расположенного за зоной приема. Как видно на графике (14) амплитуда сигнала (17) превышает амплитуду сигнала (16) на 20 дБ, что снижает динамический диапазон РЛИ и может привести к слиянию всех трех сигналов на РЛИ. На графике (18) при формировании РЛИ по заявляемому способу показано, что сигнал (17), принятый с кратной дальности, подавляется до уровня 50-55 дБ и становится неразличим на графике. Боковые лепестки сигналов (15), (16) также подавляются до уровня 50-55 дБ. Таким образом, расширяется динамический диапазон РЛИ и по сигналам (15), (16) на РЛИ с высокой вероятностью будут обнаружены два наземных объекта.
Таким образом, предлагаемый способ позволяет подавлять боковые лепестки сжатого сигнала и сигналы, принятые с кратных дальностей, что повышает динамический диапазон РЛИ до 50-60 дБ и соответственно вероятность обнаружения объектов на РЛИ как с большим уровнем, так и с малым уровнем отраженного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2019 |
|
RU2717256C1 |
| Способ формирования и обработки импульсных радиолокационных сигналов с линейной частотной модуляцией | 2023 |
|
RU2806652C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2596229C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой | 2022 |
|
RU2798822C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА ИМПУЛЬСНОГО КОГЕРЕНТНОГО РАДИОЛОКАТОРА БОКОВОГО ОБЗОРА | 2002 |
|
RU2229728C1 |
| Способ формирования изображения поверхности в бортовой радиолокационной станции с синтезированием апертуры антенны с электронным управлением лучом | 2016 |
|
RU2617116C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ (БРЛС) | 2013 |
|
RU2529523C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ БОРТОВОЙ РЛС, УСТАНОВЛЕННОЙ НА ДВИЖУЩЕМСЯ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2013 |
|
RU2528169C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией в переднем секторе обзора | 2017 |
|
RU2640406C1 |
Изобретение относится к области радиолокации и может быть использовано в бортовых радиолокационных станциях (БРЛС) для формирования радиолокационного изображения (РЛИ) поверхности Земли. Способ основан на формировании последовательности из когерентных ЛЧМ импульсных сигналов с одинаковой девиацией частоты, путем изменения значения средней частоты каждого ЛЧМ импульсного сигнала последовательности по случайному закону, когерентном излучении сформированной последовательности ЛЧМ импульсных сигналов в направлении земной поверхности в процессе радиолокационного обзора земной поверхности, приеме отраженных импульсных сигналов. После приема ЛЧМ импульсных сигналов осуществляют их аналого-цифровое преобразование с частотой FД≥2Δƒ, где Δƒ - девиация частоты ЛЧМ импульсного сигнала, когерентно накапливают принятые импульсные сигналы. После завершения накопления ЛЧМ импульсных сигналов в цифровом виде, последовательно осуществляют их сжатие и согласованную обработку и формируют амплитуды радиолокационного изображения путем детектирования обработанных ЛЧМ импульсных сигналов. При осуществлении заявляемого способа достигается технический результат, заключающийся в расширении динамического диапазона формируемого РЛИ за счет снижения уровня побочных составляющих сжатого ЛЧМ импульсного сигнала. 3 з.п. ф-лы, 3 ил.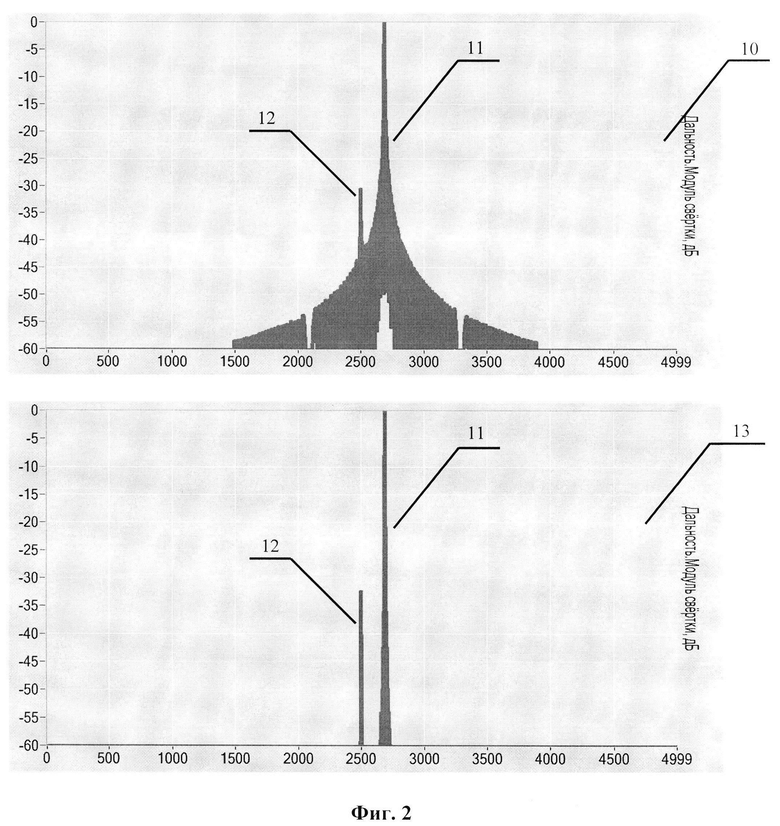
1. Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией, характеризующийся тем, что излучают импульсные сигналы в направлении земной поверхности, принимают отраженные импульсные сигналы, когерентно накапливают принятые импульсные сигналы, осуществляют сжатие сигналов, формируют амплитуды радиолокационного изображения, отличающийся тем, что перед излучением формируют последовательность из когерентных линейно-частотно модулированных (ЛЧМ) импульсных сигналов с одинаковой девиацией частоты, изменяя значение средней частоты каждого ЛЧМ импульсного сигнала последовательности по случайному закону, излучение сформированной последовательности ЛЧМ импульсных сигналов в направлении земной поверхности осуществляют когерентно в процессе радиолокационного обзора земной поверхности, после приема ЛЧМ импульсных сигналов осуществляют их аналого-цифровое преобразование с частотой FД≥2Δƒ, где Δƒ - девиация частоты ЛЧМ импульсного сигнала, после завершения накопления ЛЧМ импульсных сигналов в цифровом виде, последовательно осуществляют их сжатие и согласованную обработку, а амплитуды радиолокационного изображения формируют путем детектирования обработанных ЛЧМ импульсных сигналов.
2. Способ по п. 1, отличающийся тем, что значение средней частоты изменяют по случайному закону с равномерным распределением.
3. Способ по п. 1, отличающийся тем, что последовательность ЛЧМ импульсных сигналов формируют путем цифрового синтеза сигнала.
4. Способ по п. 1, отличающийся тем, что согласованная обработка накопленных ЛЧМ импульсных сигналов осуществляется путем гармонического анализа.
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2019 |
|
RU2717256C1 |
| Способ подавления боковых лепестков ЛЧМ-сигнала с межпериодным расширением спектра | 2016 |
|
RU2624769C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ ИЗЛУЧЕНИЕМ | 2017 |
|
RU2692238C2 |
| Способ формирования радиолокационного изображения в радиолокационной станции с синтезированной апертурой антенны | 2016 |
|
RU2632898C1 |
| CN 114217310 A, 22.03.2022 | |||
| CN 114442087 A, 06.05.2022 | |||
| US 2008218400 A1, 11.09.2008. | |||
