Изобретение относится к области телекоммуникаций и может быть использовано в коммутаторах для передачи Ethernet сообщений в распределенной системе управления жесткого реального времени.
Уровень техники
За последние несколько десятилетий технология Ethernet стала самой распространенной технологией по передачи данных. На сегодняшний момент существует много вариаций стандарта Ethernet, в том числе с поддержкой качества обслуживания. Известна технология Time-Triggered Ethernet (TTE), которая предназначена для передачи кадров реального времени в распределенной системе [US 2005/0117596 A1].
Технология ТТЕ обеспечивает передачу обычных кадров (эластичный трафик ЭТ), не имеющих жестких ограничений по времени доставки, так и кадров жесткого реального времени (РВ-трафик). Кадры РВ-трафика передаются с заранее вычисленной задержкой, которая передается в формате кадра согласно технологии ТТЕ. Кадры ЭТ-передаются как обычные кадра технологии Ethernet [US 2005/0117596 A1].
Известный коммуникационный метод передачи Ethernet сообщений по технологии ТТЕ обеспечивает передачу РВ-кадров с заранее вычисленной задержкой [US 2005/0117596 A1]. Недостатком данного метода является то, что в распределенной системе тратятся аппаратные ресурсы на сбор и вычисление константной задержки РВ-кадра. Следующим недостатком метода является то, что возникает необходимость прерывания ЭТ-кадра в случае временного конфликта между ЭТ- и РВ-кадрами в коммутаторе, это приводит к уменьшению пропускной способности сети из-за повторной передачи прерванного ЭТ-кадра. Известный существующий метод для надежной и эффективной передачи РВ-кадра привязывается к моменту передачи кадра в сеть [US 8396934 B2]. Недостатком данного метода является то, что могут возникать временные конфликты кадров и снижения пропускной способности сети, дополнительная нагрузка вычислительных средств передатчика по контролю за временем отправления. Известный метод тестирования технологии ТТЕ накладывает ограничения на установку временных тайм слотов [EP 2566105 A1], в частности недостатком данного метода является то, что отсутствует возможность передачи нескольких кадров, направленных к разным портам, в одном тайм слоте.
Наиболее близким техническим решением является патент US 2005/0117596 A1 «COMMUNICATION METHOD AND SYSTEM FOR THE TRANSMISSION OF TIME-DRIVEN AND EVENT-DRIVEN ETHERNET MESSAGES» (прототип). Аналоги: US 8396934 B2 «COMMUNICATION METHOD AND APPARATUS FOR THE EFFICIENT AND RELIABLE TRANSMISSION OF TT ETHERNET MESSAGES», EP 2566105 A1 «TIME TRIGGERED ETHERNET SYSTEM TESTING MEANS AND METHOD».
Технический результат
Технический результат – уменьшение задержки кадров в сети, повышение пропускной способности сети, исключение временных конфликтов между РВ- и ЭТ-кадрами, возможность передачи нескольких кадров, направленных к разным портам, в одном тайм слоте.
Краткое описание чертежей
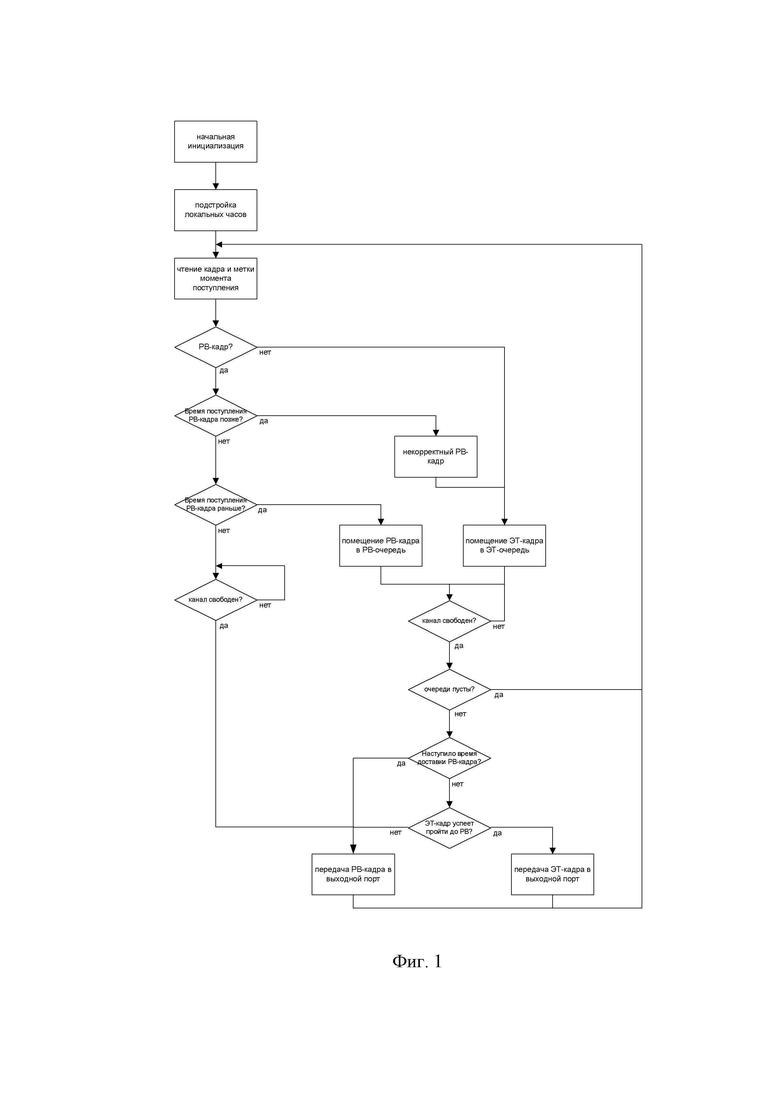
На фиг. 1 показана схема алгоритма функционирования способа передачи Ethernet сообщений в распределенной системе жесткого реального времени.
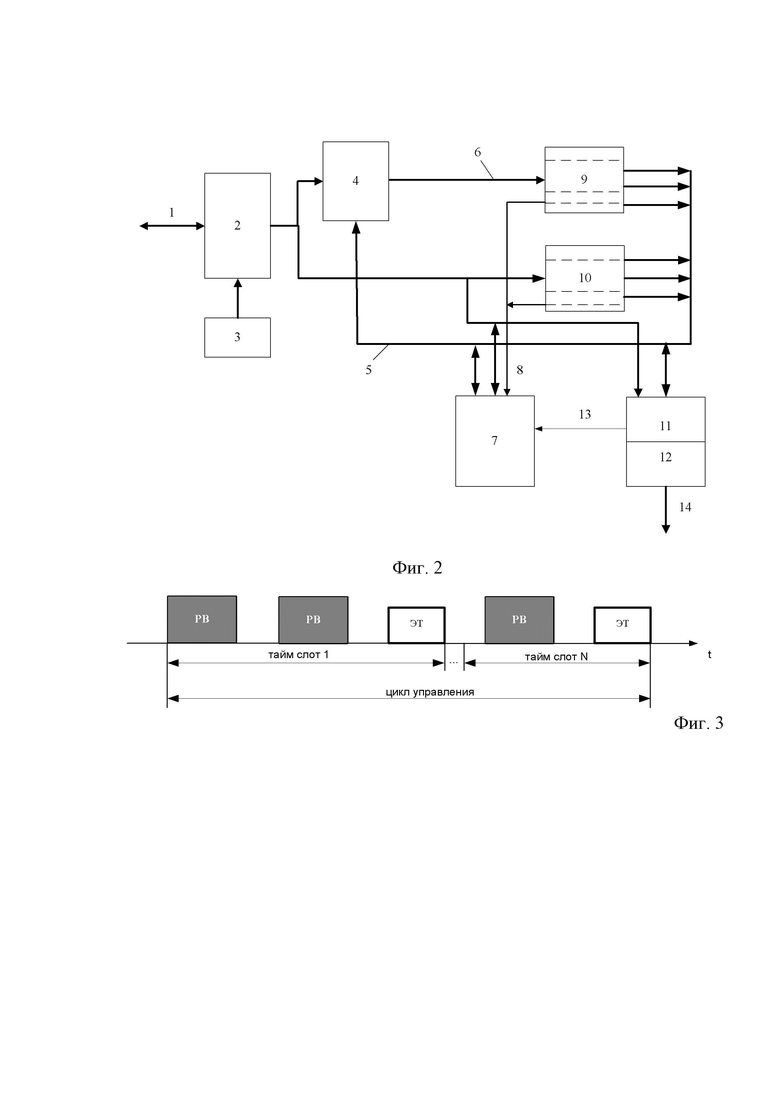
На фиг. 2 показан предпочтительный вариант реализации коммутатора, выполняющего обработку РВ- и ЭТ-кадров, где 1 - шина приема кадров из аппаратуры продвижения кадров в порт назначения коммутатора; 2 – планировщик расписания РВ-кадров; 3 – таймер; 4 - классификатор поступающих ЭТ-кадров и канал прямой записи в память; 5 – шина чтения кадров из очередей; 6 – шина передачи кадра в очередь или на выходной порт; 7 - процессор диспетчеризации; 8 - сигнал «очереди свободны»; 9 – память типа FIFO для приема РВ-кадров; 10 - память типа FIFO для приема ЭТ-кадров; 11 - канал прямого чтения кадров из очередей; 12 - физический интерфейс выходного порта; 13 - сигнал «выходной порт свободен»; 14 – шина выходного канала.
На фиг.3 показан возможный вариант расположения Ethernet сообщений по тайм слотам в цикле управления.
На фиг. 4 показаны временные диаграммы работы коммутатора во время одного тайм слота, где фиг. 4а показывает работу системы в случае, когда текущий момент передачи РВ-кадра равен сравниваемому моменту доставки РВ-кадра в планировщике расписаний; фиг. 4б показывает работу системы в случае, когда текущий момент передачи РВ-кадра больше сравниваемого момента доставки РВ-кадра в планировщике расписаний, такой РВ-кадр помечается как некорректный; фиг. 4в показывает работу системы в случае, когда текущий момент передачи РВ-кадра меньше сравниваемого момента доставки РВ-кадра в планировщике расписаний, тогда проверяется в зависимости от длины ЭТ-кадра возможность его передачи до момента доставки РВ-кадра и снятия блокировки.
Подробное описание изобретения
Реализация предлагаемого метода передачи Ethernet сообщений заключается в выполнении следующих действий:
1. При запуске системы должно быть выполнено конфигурирование, заключающееся в задании планировщика расписаний каждому сетевому узлу и задании параметров подстройки временных окон приема РВ-кадров, установки тайм слотов в циклическом алгоритме управления.
2. Коммутатор выполняет рассылку широковещательного РВ-кадра, содержащего значение локальное время, по которому происходит подстройка локальных часов сетевых узлов и их синхронизация.
3. Принятый коммутатором кадр продвигается в планировщик расписания, где классифицируется по типу трафика (РВ- или ЭТ-кадр).
4. Фиксируется момент поступления каждого РВ-кадра, значение которого сравнивается с установленным значением момента его доставки расписанием.
5. Если момент прибытия кадра позже заранее известного времени, зависимого от времени доставки, то тогда РВ-кадр помечается как некорректный.
6. Для каждого выходного порта коммутатора контролируется время доставки поступивших в него РВ-кадров, где:
1) если текущий момент поступления РВ-кадра равен значения времени доставки в расписании, то выполняется передача принятого РВ-кадра на выходной канал, даже если его буферизация не закончена;
2) если текущий момент поступления РВ-кадра меньше значения времени доставки в расписании, то РВ-кадр помещается в специальный отдельный буфер (очередь);
7. ЭТ-кадры классифицируются по классу качества обслуживания и записываются в отдельные очереди соответствующих классов, при этом снабжаются метками, указывающими на размер кадра.
8. Таймер проверяет наступление момента доставки очередного РВ-кадра, и если время доставки РВ-кадра не наступило, таймер передает управление диспетчеру очередей.
9. Диспетчер запускается при появлении непустых очередей и освобождении выходного канала.
10. Диспетчер проверяет возможность передачи ЭТ-кадра до того как наступит момент доставки очередного РВ-кадра:
ТТЕК + ТЭТ ≤ ТБЛ + ТРВ,
где ТТЕК – текущее время в системе, ТЭТ – время передачи ЭТ-кадра с учетом его длины, ТБЛ – время блокировки, ТРВ – время передачи РВ-кадра.
Таким образом, возможность передачи ЭТ-кадра определяется исходя из следующего условия: текущий момент времени системы и длина ЭТ-кадра должны быть меньше наступления момента доставки очередного РВ-кадра, то:
1) запускается передача ЭТ-кадра из выбранной очереди в выходной канал;
2) иначе ожидается момент доставки очередного РВ-кадра, и когда он наступает, осуществляется передача очередного РВ-кадра из выбранной очереди в выходной канал;
11. Выполняется переход к п.3 и снова осуществляется передача Ethernet сообщений.
Функционирование предпочтительного устройства реализующего предложенный метод передачи Ethernet сообщений заключается в следующем.
По шине 1 поступают кадры из аппаратуры продвижения кадров в порт назначения коммутатора, направленные в данный порт. Текущий момент поступления РВ-кадра сравнивается с моментом доставки в планировщике расписания 2. Планировщик расписания представляет собой память (набор регистров), в которой хранятся значения моментов доставки РВ-кадров. Таймера 3 проверяет момент доставки РВ-кадров. Планировщик расписания может либо передавать ЭТ-кадр или некорректный РВ-кадр в классифицирующее устройство 4 (классификатор), либо помещать РВ-кадр в очередь РВ-кадров (текущий момент РВ-кадра меньше момента его доставки), либо передавать РВ-кадр сразу же в выходной канал 14 (текущий момент доставки РВ-кадра равен моменту его доставки). Классификатор классифицирует ЭТ-кадры в зависимости от типа трафика и помещает в очередь ЭТ-кадров.
Кадры записываются по шине 6, а считываются из очередей по шине 5. Таймер 3 постоянно проверяет наступление момента доставки РВ-кадра и передает управление диспетчеру очередей 7.
Диспетчер запускается сигналами 8 и 13, когда очереди не пусты и выходной канал свободен. Осуществляется передача кадров в выходной канал.
Расположение Ethernet сообщений по тайм слотам в цикле управления предпочтительного устройства реализующего предложенный метод передачи Ethernet сообщений заключается в следующем.
При инициализации системы устанавливаются тайм слоты в цикле управления системы. Цикл управления может содержать N тайм слотов. Предоставляется возможность передачи нескольких кадров, направленных к разным портам, в одном тайм слоте.
Функционирование временных диаграмм предпочтительного устройства реализующего предложенный метод передачи Ethernet сообщений заключается в следующем.
Текущий момент поступления РВ-кадра сравнивается с моментом доставки данного РВ-кадра в расписании планировщика (ПЛ), и:
1) если оба момента равны (tРВ= tПЛ), то РВ-кадр передается сразу же в выходной канал;
2) если момент поступления РВ-кадра больше момента доставки в расписании (tРВ> tПЛ), то РВ-кадр помечается как некорректный и передается как ЭТ-кадр;
3) если момент поступления РВ-кадра меньше момента доставки в расписании (tРВ<tПЛ), то проверяется возможность передачи ЭТ-кадра: текущий момент времени системы и длина ЭТ-кадра должны быть меньше наступления момента доставки РВ-кадра (tБЛ> tЭТ2), тогда осуществляется передача ЭТ-кадра, иначе когда (tБЛ< tЭТ3), то ЭТ-кадр передается только после передачи РВ-кадра.

Изобретение относится к передаче Ethernet сообщений в распределенной системе управления жесткого реального времени. Технический результат - уменьшение задержки кадров в сети. Способ передачи Ethernet сообщений в распределенной системе реального времени, реализующей циклический алгоритм управления, в которой есть множество сетевых узлов, по крайней мере, один коммутатор, соединенных между собой коммуникационными каналами, который обеспечивает пересылку между узлами как обычных кадров (эластичный трафик ЭТ), не имеющих жестких ограничений по времени доставки, так и кадров жесткого реального времени (РВ-трафик), кадры имеют различные поля заголовка, причем РВ-кадры в заголовке содержат указатель на время доставки кадра, коммутатор имеет локальные часы, которые подстраиваются по входящим РВ-кадрам от главных часов системы, коммутатор проверяет момент приема РВ-кадра с заранее известным временным окном для выявления возможности передачи получателю, и в случае невозможности доставки РВ-кадр в заданное время, то он искажается таким образом, что приемники обнаружили этот кадр как некорректный, причем коммутатор обеспечивает доставку РВ-кадров получателю в заранее назначенные моменты времени по расписанию, устанавливаемому заранее для каждого выходного порта коммутатора конфигурационными кадрами, при этом моменты времени доставки кадров и расписания устанавливаются относительно начала цикла управления. 6 з.п. ф-лы, 4 ил.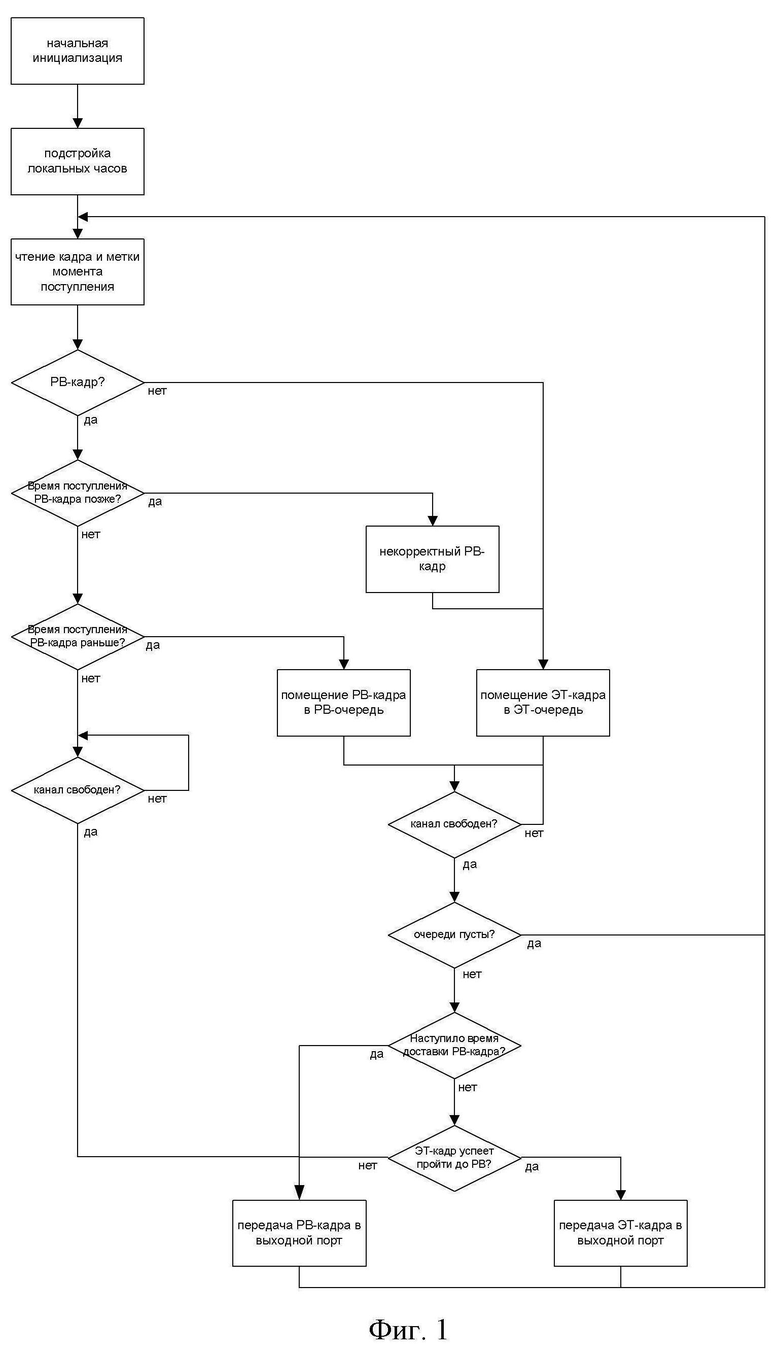
1. Способ передачи Ethernet сообщений в распределенной системе реального времени, реализующей циклический алгоритм управления, в которой есть множество сетевых узлов, по крайней мере, один коммутатор, соединенных между собой коммуникационными каналами, который обеспечивает пересылку между узлами как обычных кадров (эластичный трафик ЭТ), не имеющих жестких ограничений по времени доставки, так и кадров жесткого реального времени (РВ-трафик), кадры имеют различные поля заголовка, причем РВ-кадры в заголовке содержат указатель на время доставки кадра, коммутатор имеет локальные часы, которые подстраиваются по входящим РВ-кадрам от главных часов системы, коммутатор проверяет момент приема РВ-кадра с заранее известным временным окном для выявления возможности передачи получателю, и в случае невозможности доставки РВ-кадр в заданное время, то он искажается таким образом, что приемники обнаружили этот кадр как некорректный, отличающийся тем, что коммутатор обеспечивает доставку РВ-кадров получателю в заранее назначенные моменты времени по расписанию, устанавливаемому заранее для каждого выходного порта коммутатора конфигурационными кадрами, при этом моменты времени доставки кадров и расписания устанавливаются относительно начала цикла управления.
2. Способ по п.1, отличающийся тем, что принятый коммутатором кадр продвигается в выходной порт назначения, где классифицируется по типу трафика, кадры ЭТ- и РВ-трафика помещаются в отдельные буфера, при этом фиксируется момент поступления каждого РВ-кадра, значение которого сравнивается с установленным значением момента его доставки расписанием и в случае прибытия кадра позже заранее известного времени, зависимого от времени доставки, он помечается как некорректный.
3. Способ по п.1, отличающийся тем, что для каждого выходного порта коммутатора контролируется время доставки поступивших в него РВ-кадров и при достижении локального времени окна, определяемого соответствующим расписанием, выполняется передача буферизируемого РВ-кадра, даже если его буферизация не закончена.
4. Способ по п.1, отличающийся тем, что для каждого момента доставки РВ-кадров, указанных в расписании, вычисляется время блокировки начала передачи ЭТ-кадров, величина которого определяется максимальной длиной ЭТ-кадра, при этом очередная блокировка снимается после передачи очередного корректного РВ-кадра, в случае некорректного РВ-кадра блокировка снимается при окончании окна или отсутствия поступления очередного РВ-кадра.
5. Способ по п.1, отличающийся тем, что передача ЭТ-кадра из соответствующего буфера выходного порта коммутатора разрешается после передачи каждого РВ-кадра при условии отсутствия блокировки.
6. Способ по п.1, отличающийся тем, что коммутатор выполняет рассылку широковещательного РВ-кадра, содержащего значение локальное время, по которому происходит подстройка локальных часов сетевых узлов и их синхронизация.
7. Способ по п.2, отличающийся тем, что некорректные РВ-кадры передаются как ЭТ-кадры.
| US 7839868 B2, 23.11.2010 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 8396934 B2, 12.03.2013 | |||
| RU 2011124031 A, 10.01.2013. | |||

