Изобретение относится к устройству адаптивного фильтра в частотной области с делением на блоки. В частности, изобретение относится к новой ограничивающей концепции для устройств адаптивного фильтра в частотной области с делением на блоки.
Устройства адаптивного фильтра в частотной области с делением на блоки известны, например, из ссылочного документа [10]. Одним недостатком устройств в соответствии с ссылочным документом [10] является их высокая сложность.
Цель настоящего изобретения состоит в предоставлении улучшенного устройства адаптивного фильтра в частотной области с делением на блоки.
Цель достигается посредством устройства адаптивного фильтра в частотной области с делением на блоки, содержащего:
адаптивный фильтр в частотной области, выполненный с возможностью фильтрации представления в частотной области входного сигнала во временной области в зависимости от набора коэффициентов фильтра, состоящего из множества блоков коэффициентов фильтра, для того чтобы создавать отфильтрованный сигнал;
множество параллельно организованных блоков обновления фильтра, при этом каждый из блоков обновления фильтра выполнен с возможностью обновления одного из блоков коэффициентов фильтра на основании сигнала обновления, собранного посредством круговой корреляции блока сигнала представления в частотной области и сигнала управления в частотной области, содержащего представление отфильтрованного сигнала;
при этом каждый из блоков обновления фильтра содержит модуль адаптации, выполненный с возможностью исполнения последовательности адаптации, содержащей этапы
вычисления аппроксимации ограниченного обновления градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра посредством применения аппроксимированной ограничивающей матрицы с меньшей сложностью, чем ограничивающая матрица, к не ограниченному обновлению градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра, при этом не ограниченное обновление градиента получается из сигнала обновления, и
вычисления накопленной ошибки, которая вносится в не ограниченное обновление градиента посредством применения аппроксимированной ограничивающей матрицы к не ограниченному обновлению градиента;
при этом каждый из блоков обновления фильтра содержит модуль коррекции, выполненный с возможностью исполнения последовательности коррекции, содержащей этапы
вычисления скорректированного ограниченного обновления градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра посредством применения ограничивающей матрицы к сумме аппроксимации ограниченного обновления градиента и накопленной ошибки.
Ограничивающая матрица является эквивалентом в частотной области применения прямоугольной вырезающей функции к круговой корреляции блока во временной области, чтобы выбирать только линейные компоненты, которые могут быть определены как:
при этом n является индексом времени, M является длиной дискретного преобразования Фурье (DFT), и N является количеством коэффициентов фильтра в блоке.
После анализа, проведенного в ссылочном документе [4], элементы ограничивающей матрицы, G, могут быть определены следующим образом:

с G(k, k')=N/M если k=k'; где k и k' являются индексами дискретных частот и WM=e(-j2π/M) является базисной функцией DFT.
Понятие аппроксимированная ограничивающая матрица относится к любой аппроксимации ограничивающей матрицы в частотной области, которая имеет точно такое же количество столбцов и строк, что и ограничивающая матрица, но более низкую сложность, чем ограничивающая матрица. Уменьшение сложности может быть, в частности, достигнуто посредством установки некоторых из элементов в ноль.
Изобретение уменьшает сложность устройств адаптивного фильтра в частотной области с делением на блоки посредством упрощения ограничивающей операции. В противоположность другим ранее предложенным устройствам, устройство, в соответствии с изобретением, позволяет уменьшить сложность без заметного уменьшения скорости сходимости адаптивной фильтрации, оно является гибким с точки зрения параметров исполнения, и оно является полностью параллезируемым, поскольку оно корректирует аппроксимацию обновления градиента одного блока на основании только накопленной ошибки того блока.
Устройство адаптивного фильтра в частотной области с делением на блоки в соответствии с изобретением может быть использовано для акустического эхоподавления. Кроме того, изобретение может быть использовано, чтобы уменьшать сложность любого устройства адаптивного фильтра в частотной области с делением на блоки независимо от конкретного приложения. Более точно, оно может быть использовано в других приложениях, таких как идентификация системы, уменьшение шума, частотная коррекция канала, и т.д.
В соответствии с предпочтительным вариантом осуществления изобретения устройство адаптивного фильтра в частотной области с делением на блоки содержит модуль управления последовательностью коррекции, выполненный с возможностью принятия решения, применяется ли и в каком из блоков обновления фильтра последовательность коррекции после исполнения последовательности адаптации.
В соответствии с предпочтительным вариантом осуществления изобретения, модуль управления последовательностью коррекции выполнен с возможностью принятия решения, применяется ли и в каком из блоков обновления фильтра последовательность коррекции на основании накопленных ошибок блоков обновления фильтра.
В соответствии с предпочтительным вариантом осуществления изобретения модуль управления последовательностью коррекции содержит схему коррекции, определяющую для каждого из блоков обновления фильтра количество последовательностей адаптации, после которого последовательность коррекции применяется в соответствующем разделе фильтра.
В соответствии с предпочтительным вариантом осуществления изобретения для каждого из блоков обновления фильтра количество последовательностей адаптации, после которого последовательность коррекции применяется в соответствующем разделе фильтра, сокращается в ответ на изменение сигнала управления в частотной области, которое превышает пороговую величину.
В соответствии с предпочтительным вариантом осуществления изобретения для каждого из блоков обновления фильтра количество последовательностей адаптации, после которого последовательность коррекции применяется в соответствующем разделе фильтра, динамически адаптируется на основании измерения сигнала управления в частотной области.
В соответствии с предпочтительным вариантом осуществления изобретения устройство адаптивного фильтра в частотной области с делением на блоки содержит модуль обновления аппроксимированной ограничивающей матрицы, выполненный с возможностью динамической адаптации сложности аппроксимированной ограничивающей матрицы.
В соответствии с предпочтительным вариантом осуществления изобретения модуль обновления аппроксимированной ограничивающей матрицы выполнен с возможностью динамической адаптации сложности аппроксимированной ограничивающей матрицы в зависимости от измерения сигнала управления в частотной области.
В соответствии с предпочтительным вариантом осуществления изобретения, модуль обновления аппроксимированной ограничивающей матрицы выполнен с возможностью увеличения сложности аппроксимированной ограничивающей матрицы в ответ на изменение сигнала управления в частотной области, которое превышает пороговую величину.
В дополнительном аспекте изобретение предоставляет устройство для подавления эхо-сигнала у входного сигнала во временной области. Устройство содержит устройство адаптивного фильтра в частотной области с делением на блоки, при этом устройство адаптивного фильтра в частотной области с делением на блоки содержащее:
адаптивный фильтр в частотной области, выполненный с возможностью фильтрации представления в частотной области входного сигнала во временной области в зависимости от набора коэффициентов фильтра, состоящего из множества блоков коэффициентов фильтра, для того чтобы создавать отфильтрованный сигнал;
преобразователь частотной области во временную область, выполненный с возможностью преобразования отфильтрованного сигнала в оцененный эхо-сигнал, представляющий собой оценку эхо-сигнала во временной области;
модуль вычитания для создания выходного сигнала посредством вычитания оцененного эхо-сигнала из сигнала-который-должен-быть-обработан, содержащего эхо-сигнал;
множество параллельно организованных блоков обновления фильтра, при этом каждый из блоков обновления фильтра выполнен с возможностью обновления одного из блоков коэффициентов фильтра на основании сигнала обновления, собранного посредством круговой корреляции блока сигнала представления в частотной области и сигнала управления в частотной области, содержащего представление отфильтрованного сигнала;
при этом каждый из блоков обновления фильтра содержит модуль адаптации, выполненный с возможностью исполнения последовательности адаптации, содержащей этапы
вычисления аппроксимации ограниченного обновления градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра посредством применения аппроксимированной ограничивающей матрицы с меньшей сложностью, чем ограничивающая матрица, к не ограниченному обновлению градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра, при этом не ограниченное обновление градиента получается из сигнала обновления, и
вычисления накопленной ошибки, которая вносится в не ограниченный градиент посредством применения аппроксимированной ограничивающей матрицы к не ограниченному обновлению градиента;
при этом каждый из блоков обновления фильтра содержит модуль коррекции, выполненный с возможностью исполнения последовательности коррекции, содержащей этапы
вычисления скорректированного ограниченного обновления градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра посредством применения ограничивающей матрицы к сумме аппроксимации ограниченного обновления градиента и накопленной ошибки.
В дополнительном аспекте изобретение предоставляет способ адаптивной фильтрации, содержащий этапы, на которых:
используют адаптивный фильтр в частотной области для фильтрации сигнала представления в частотной области входного сигнала во временной области в зависимости от набора коэффициентов фильтра, состоящего из множества блоков коэффициентов фильтра, для того чтобы создавать отфильтрованный сигнал;
используют каждый раздел обновления фильтра из множества параллельно организованных блоков обновления фильтра для обновления одного из блоков коэффициентов фильтра на основании сигнала обновления, собранного посредством круговой корреляции блока сигнала представления в частотной области и сигнала управления в частотной области, содержащего представление отфильтрованного сигнала;
исполняют последовательность адаптации для каждого из блоков обновления фильтра посредством использования модуля адаптации соответствующего блока обновления фильтра, при этом последовательность адаптации содержит этапы
вычисления аппроксимации ограниченного обновления градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра посредством применения аппроксимированной ограничивающей матрицы с меньшей сложностью, чем ограничивающая матрица, к не ограниченному обновлению градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра, при этом не ограниченное обновление градиента получается из сигнала обновления, и
вычисления накопленной ошибки, которая вносится в не ограниченный градиент посредством применения аппроксимированной ограничивающей матрицы к не ограниченному обновлению градиента;
выполняют последовательность коррекции для каждого из блоков обновления фильтра посредством использования модуля коррекции соответствующего блока обновления фильтра, при этом последовательность коррекции содержит этапы
вычисления скорректированного ограниченного обновления градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра посредством применения ограничивающей матрицы в частотной области к сумме аппроксимации ограниченного обновления градиента и накопленной ошибки.
Компьютерная программа для адаптивной фильтрации, при выполнении на процессоре, исполняющая способ изобретения.
Предпочтительные варианты осуществления изобретения далее обсуждаются в отношении сопроводительных чертежей, на которых:
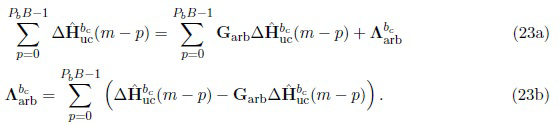
Фиг. 1 предоставляет обзор общей структуры устройства адаптивного фильтра в частотной области (FDAF) в соответствии с предшествующим уровнем техники в схематическом виде, взятый из ссылочного документа [1];
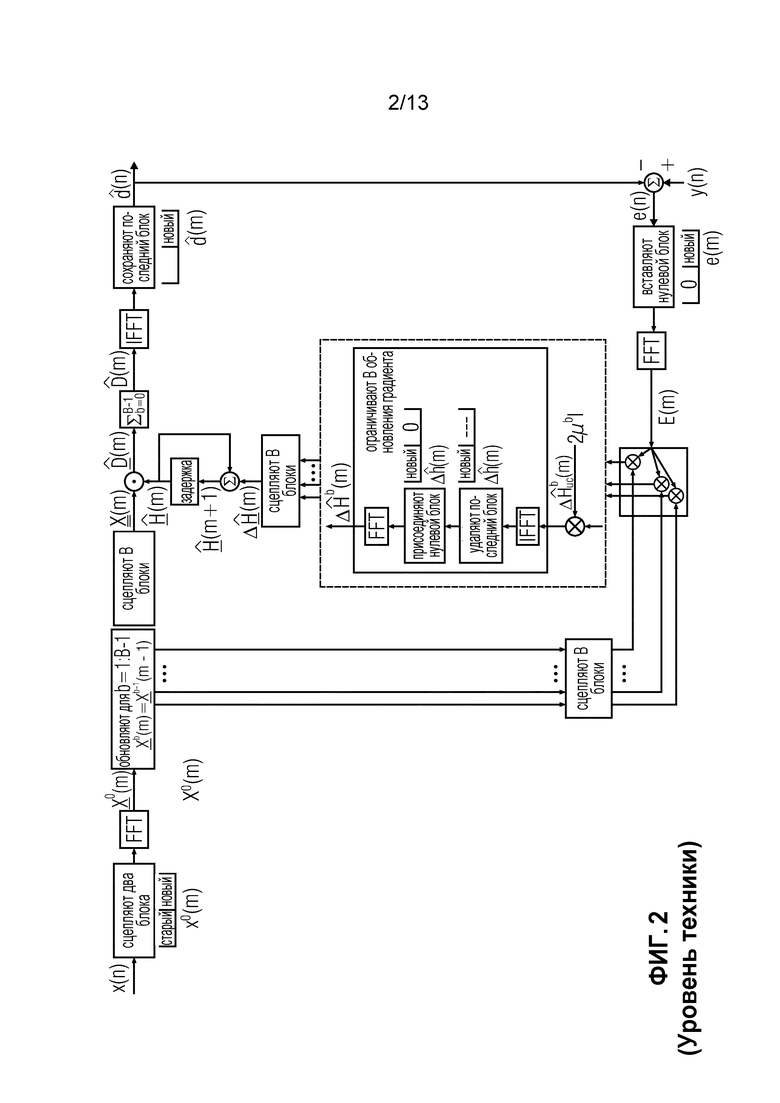
Фиг. 2 предоставляет обзор общей структуры устройства адаптивного фильтра в частотной области (PBFDAF) в соответствии с предшествующим уровнем техники в схематическом виде;
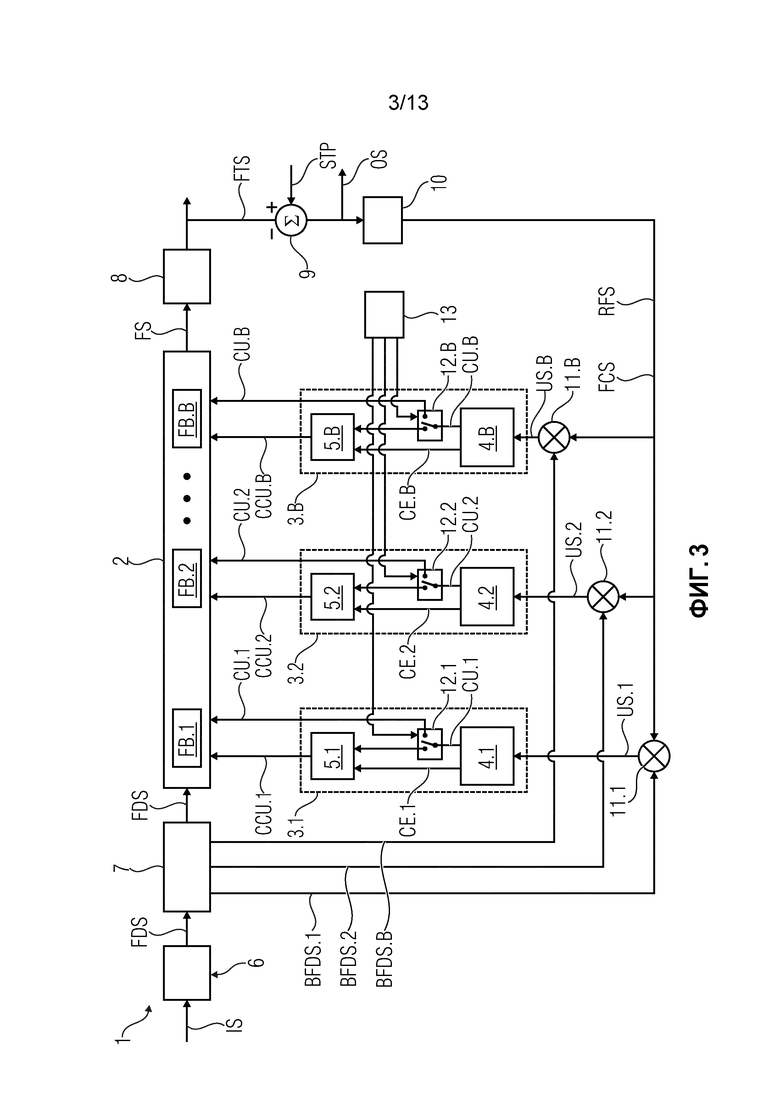
Фиг. 3 иллюстрирует первый вариант осуществления устройства фильтра в частотной области с делением на блоки в соответствии с изобретением в схематическом виде;
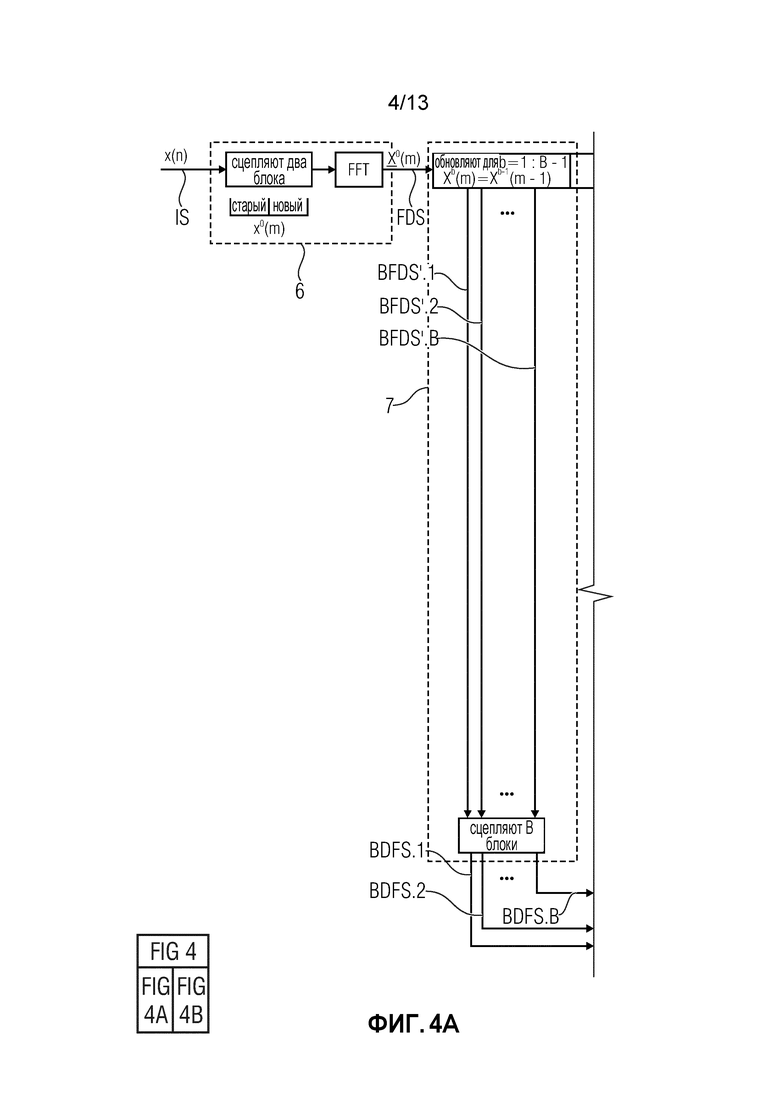
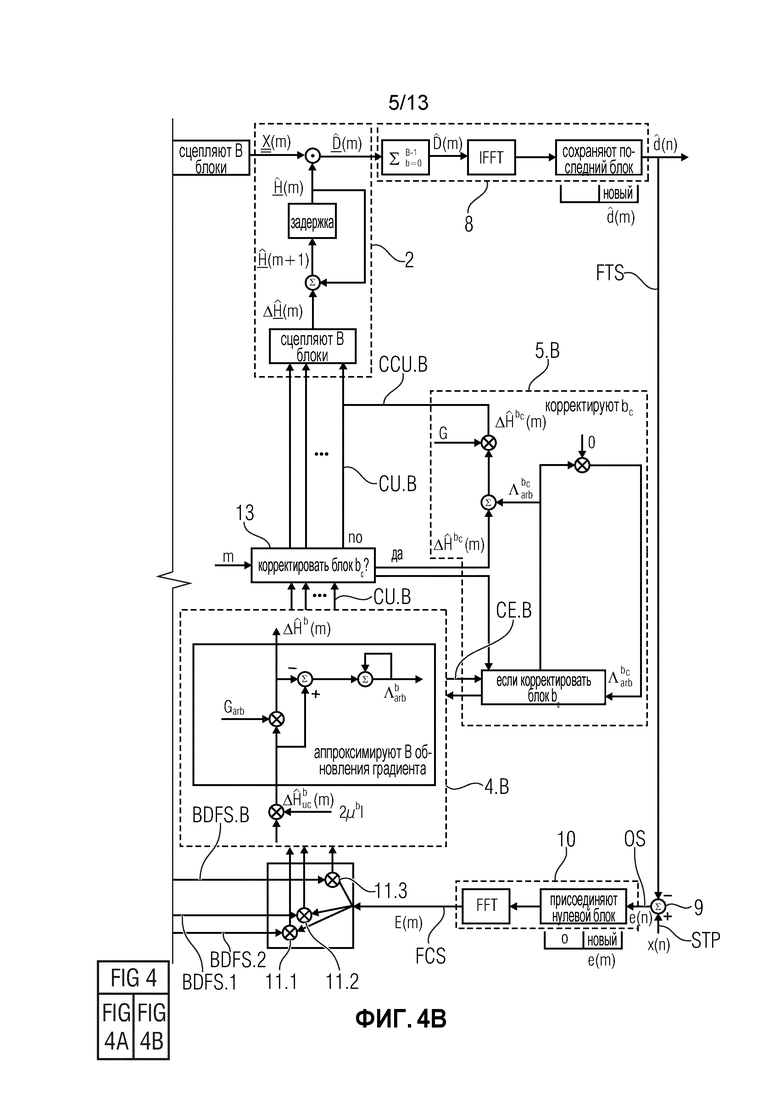
Фиг. 4 иллюстрирует второй вариант осуществления устройства фильтра в частотной области с делением на блоки в соответствии с изобретением в схематическом виде;
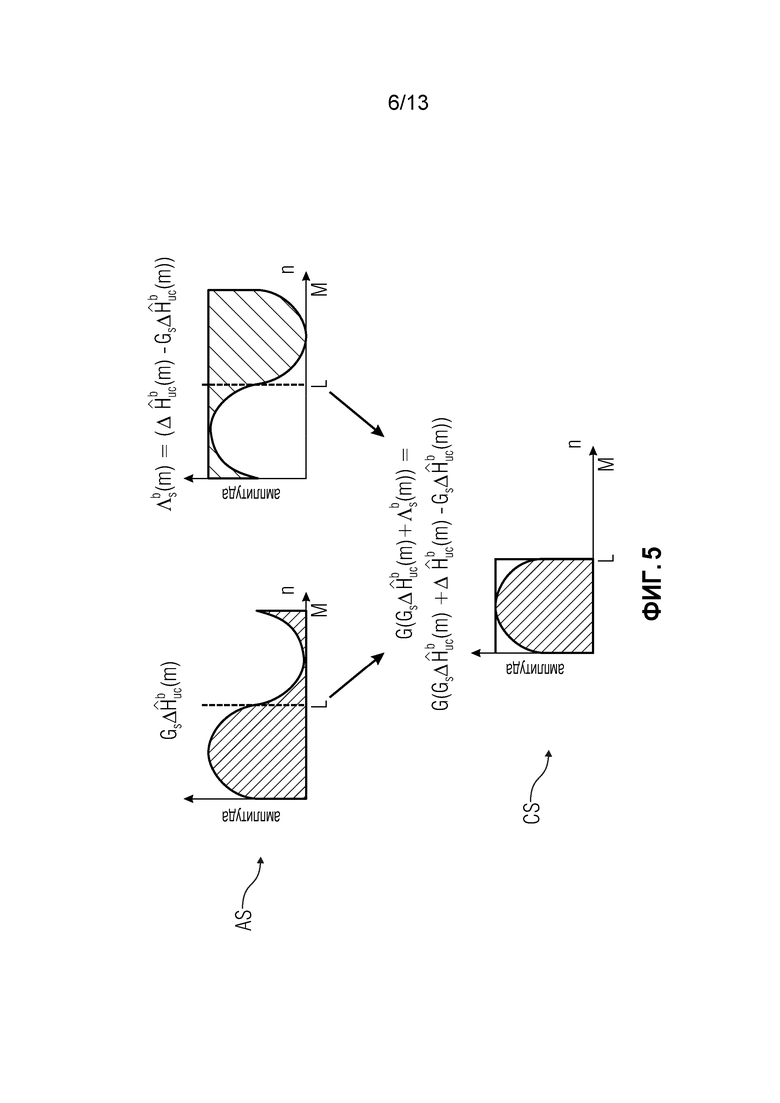
Фиг. 5 иллюстрирует ограничивающую операцию в соответствии с изобретением в схематическом виде;
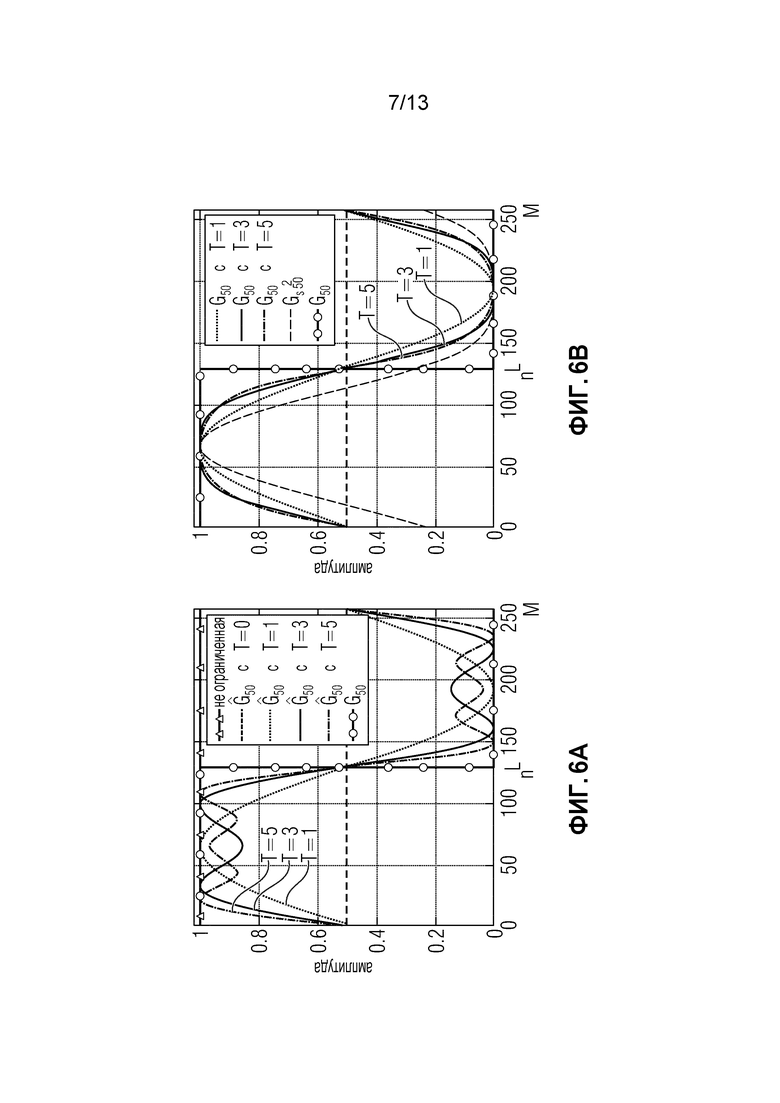
Фиг. 6 предоставляет пример ограничивающих окон во временной области, соответствующих разным ограничивающим матрицам, при этом предполагается перекрытие окон в 50%;
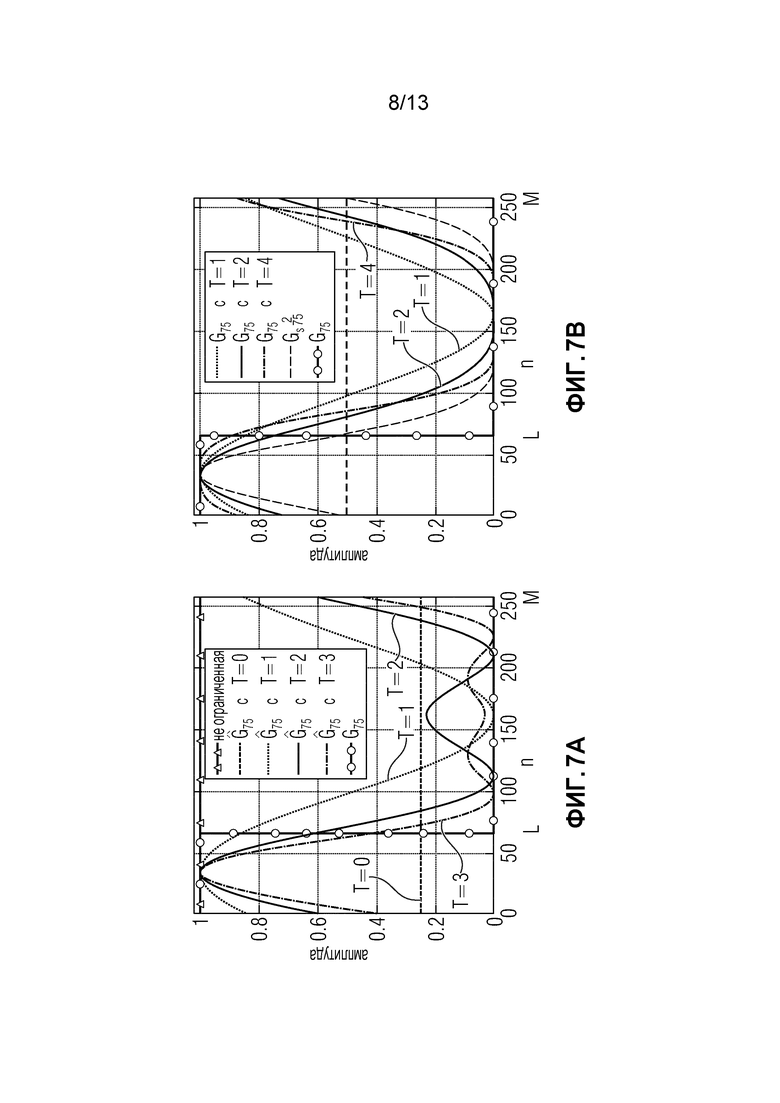
Фиг. 7 предоставляет примеры ограничивающих окон во временной области, соответствующих разным ограничивающим матрицам, при этом предполагается перекрытие окон в 75%;
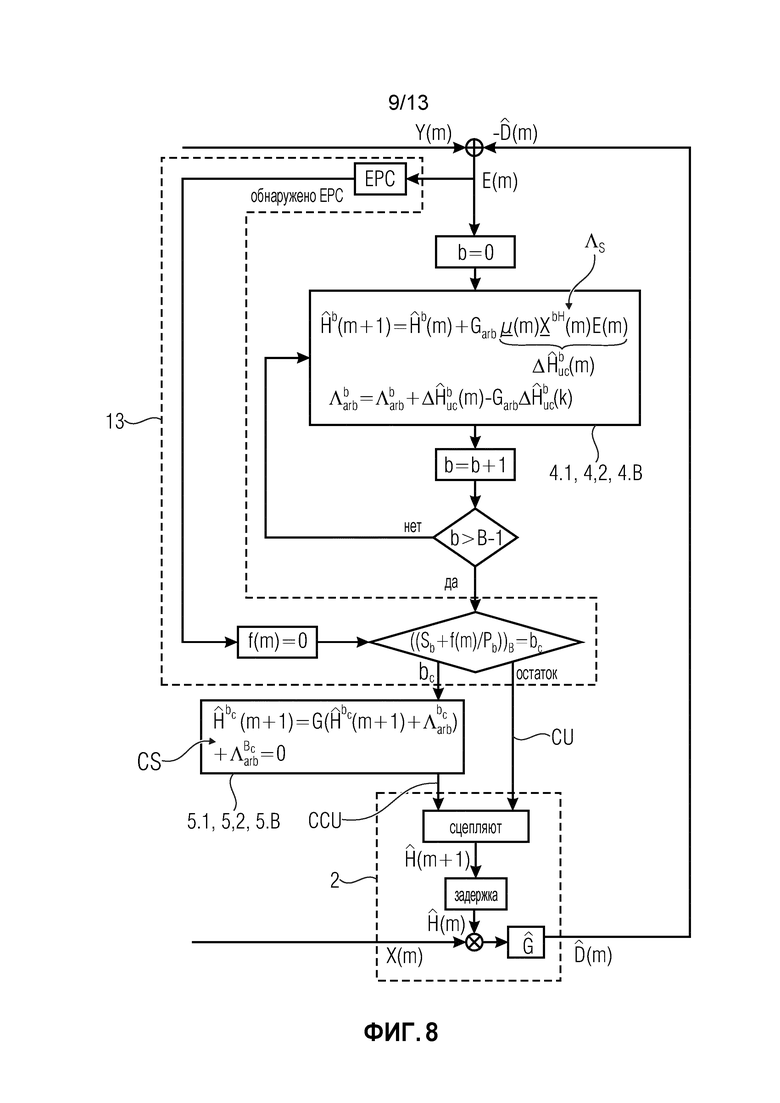
Фиг. 8 показывает принцип работы первого варианта осуществления модуля управления последовательностью коррекции в форме блок-схемы;
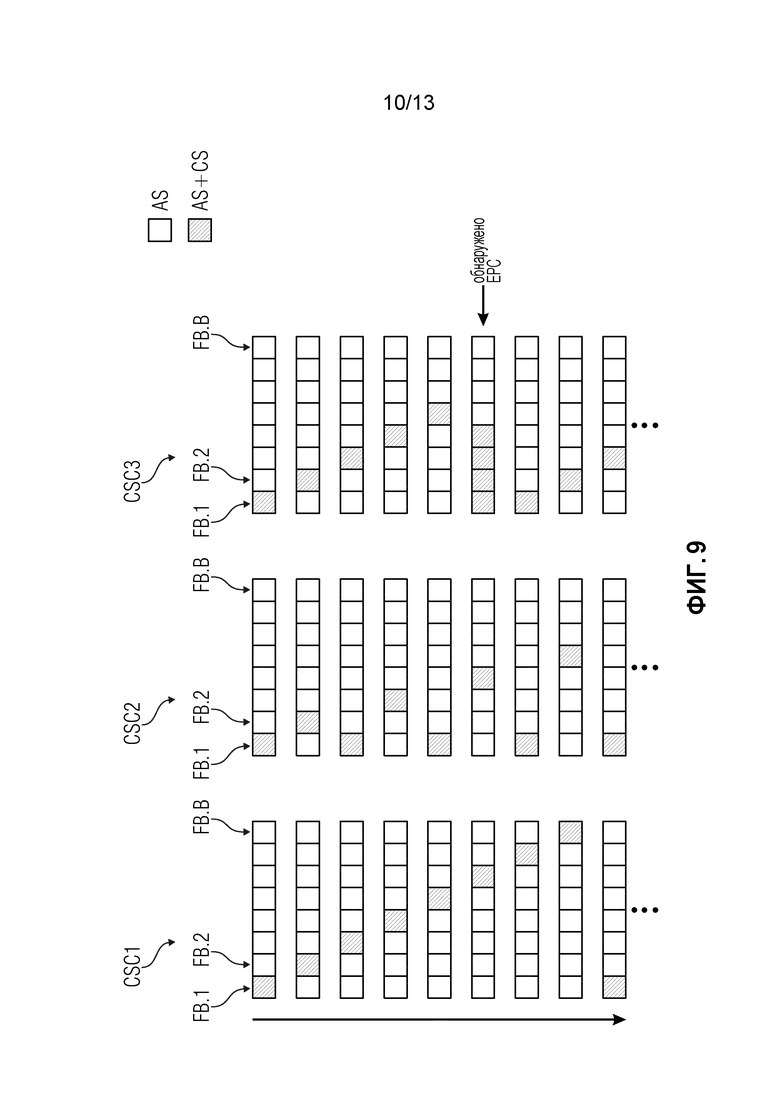
Фиг. 9 предоставляет примеры схем коррекции;
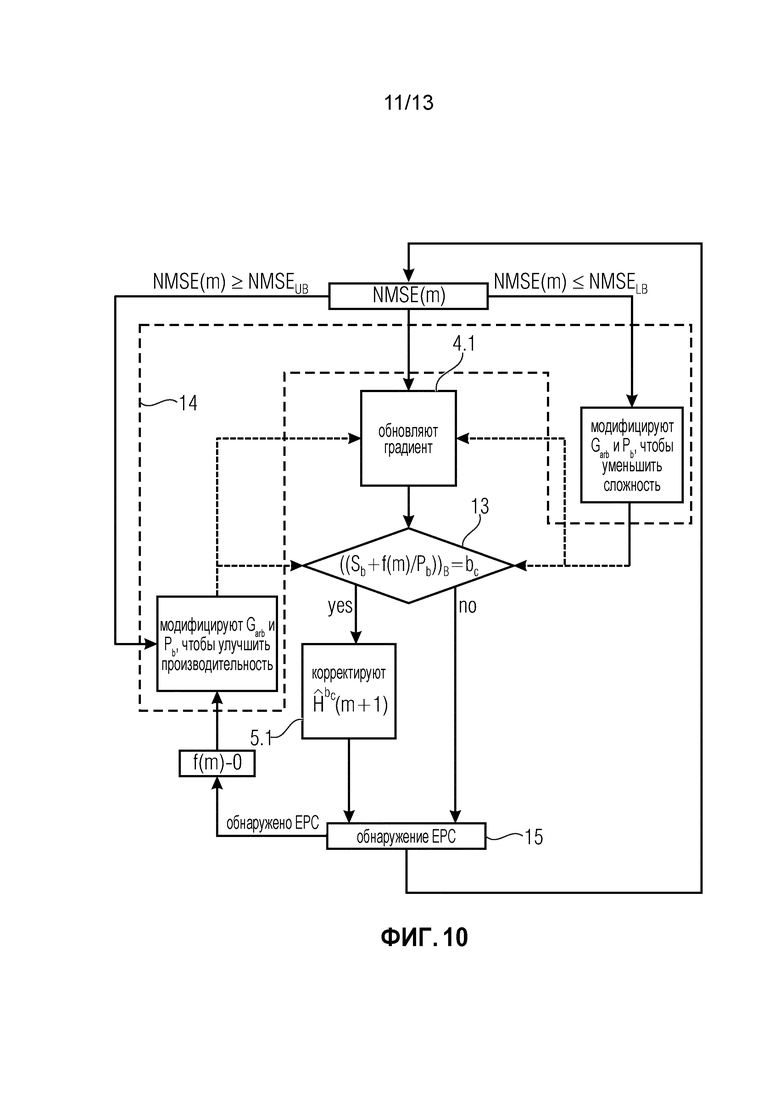
Фиг. 10 показывает принцип работы второго варианта осуществления модуля управления последовательностью коррекции в форме блок-схемы;
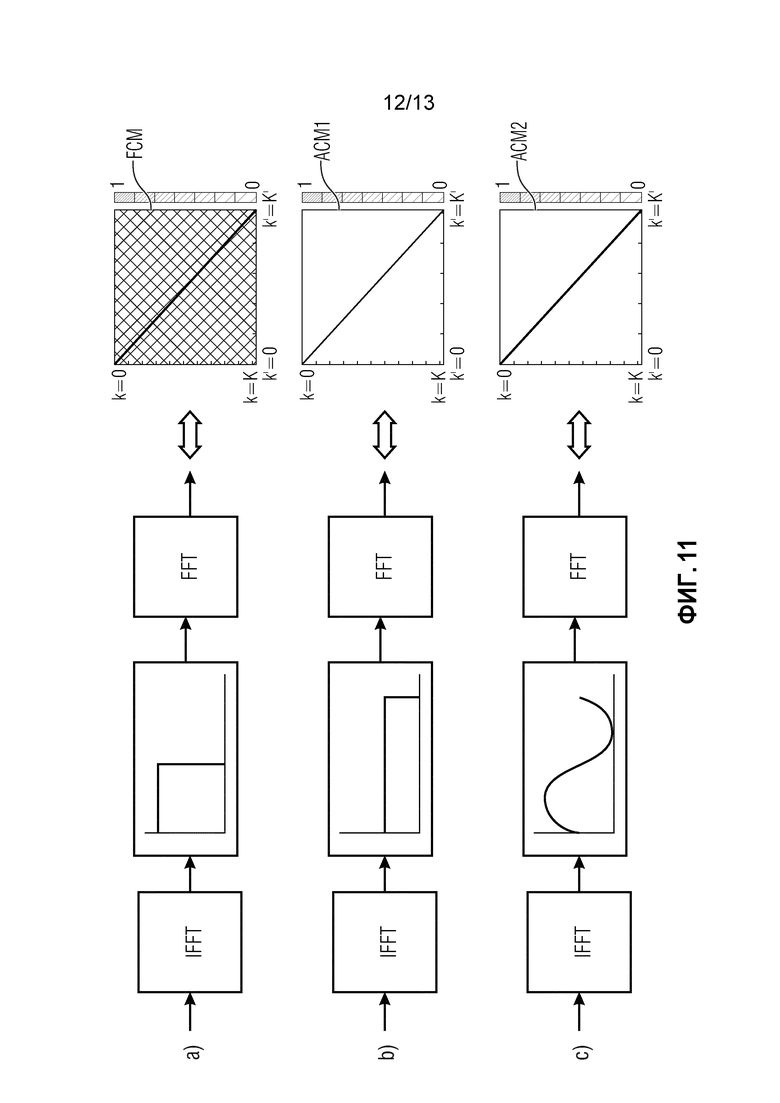
Фиг. 11 предоставляет примеры окон во временной области и их соответствующие ограничивающие матрицы в частотной области; и
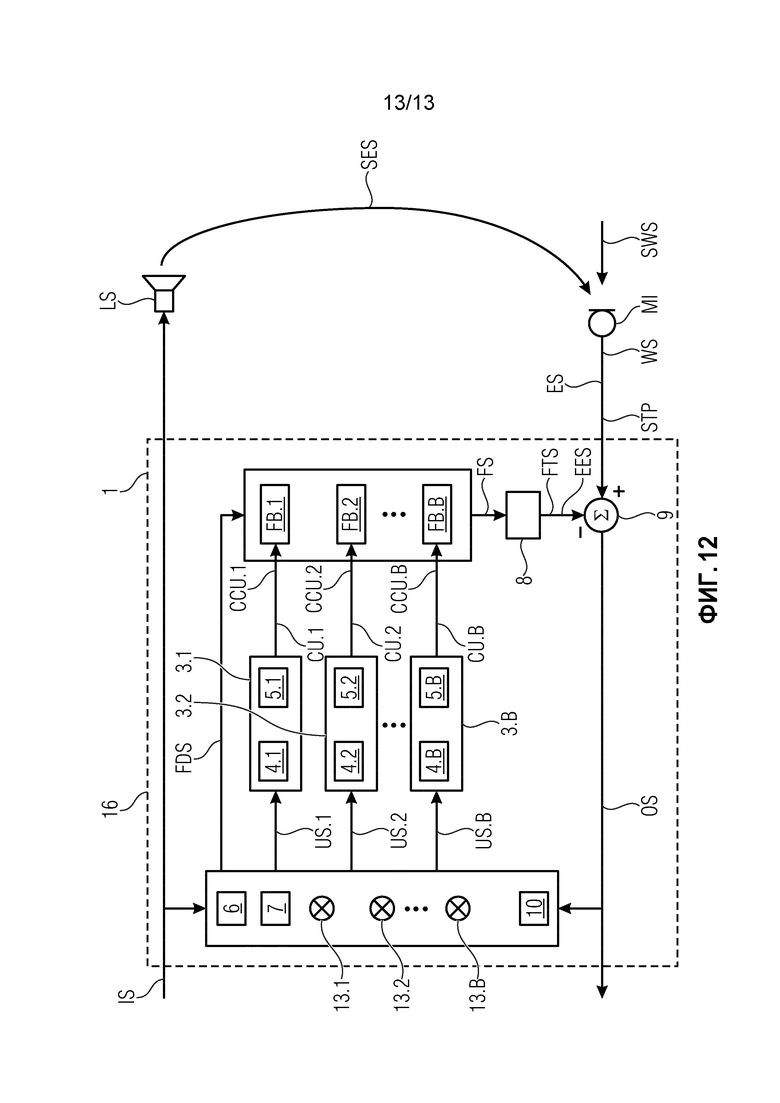
Фиг. 12 иллюстрирует первый вариант осуществления устройства для подавления эхо-сигнала у входного сигнала во временной области в соответствии с изобретением в схематическом виде.
Перед описанием новых признаков изобретения, сначала будет дано некоторое представление в отношении проблем, которые присутствую при выполнении сверток в области дискретного преобразования Фурье (область DFT) и описание ограничивающей операции. Это будет сопровождаться формулировкой проблемы адаптивных фильтров в частотной области и их основанной на делении на блоки реализации в конкретном контексте акустического эхоподавления (AFC).
Акустическое эхоподавление используется, чтобы справляться с электро-акустической связью между громкоговорителями и микрофонами в, например, сценариях связи «свободные руки». Электро-акустическая связь является результатом того, что сигнал громкоговорителя, или дальнего конца, распространяется по помещению и получается микрофоном. Как следствие, сигнал микрофона содержит не только требуемую речь на ближнем конце и фоновый шум, но также акустический эхо-сигнал. Средства подавления акустического эхо используют алгоритмы адаптивного фильтра, см. например ссылочные документы [1] и [2], чтобы идентифицировать акустический эхо-тракт, который необходим, чтобы оценить акустический эхо-сигнал. Затем, оцененное эхо вычитается из сигнала микрофона перед передачей.
Фиг. 1 предоставляет обзор общей структуры устройства адаптивного фильтра в частотной области (FDAF) в соответствии с ссылочным документом [1]. Устройства адаптивного фильтра в частотной области обеспечивают более низкую алгоритмическую сложность в сравнении с их аналогами во временной области из-за того факта, что свертка (и корреляции) вычисляются в области DFT. Тем не менее, свертка или корреляция, выполняемая в области DFT, соответствует круговой свертке, или корреляции, длиной M, причем M является длиной DFT, во временной области, см. ссылочный документ [3], т.е.

где m является индексом дискретного кадра,  обозначает круговую свертку длиной M, а верхний индекс (⋅)H обозначает транспонирование по Эрмиту. В оставшейся части используется следующая система обозначений буквы жирным шрифтом используются для векторов, а подчеркнутые буквы жирным шрифтом для квадратных матриц. Прописные буквы используются для обозначения переменных в области DFT. Поскольку в нижеследующем концентрируются на корреляциях, выполняемых в области DFT, будет описана ограничивающая операция для круговой корреляции. Круговая корреляция во временной области определяется посредством, см. ссылочный документ [3],
обозначает круговую свертку длиной M, а верхний индекс (⋅)H обозначает транспонирование по Эрмиту. В оставшейся части используется следующая система обозначений буквы жирным шрифтом используются для векторов, а подчеркнутые буквы жирным шрифтом для квадратных матриц. Прописные буквы используются для обозначения переменных в области DFT. Поскольку в нижеследующем концентрируются на корреляциях, выполняемых в области DFT, будет описана ограничивающая операция для круговой корреляции. Круговая корреляция во временной области определяется посредством, см. ссылочный документ [3],

где n обозначает индекс дискретного времени и ((⋅))M обозначает операцию по модулю M. Если предполагается, что длина у a(m) составляет M и что b(m) является длиной L<M, в ссылочном документе [3] только первые M-L+1 коэффициенты совпадают с линейной корреляцией, тогда как последние L-1 ответвления являются результатом циклического перехода. Как описано в ссылочном документе [1], итог круговой корреляции может быть линеаризован посредством выбора только линейных коэффициентов и установки оставшихся коэффициентов в ноль. Данная процедура обозначается в качестве ограничивающей операции.
Общая структура алгоритма FDAF, использующего способ перекрытия с сохранением (OLS), изображена на Фиг. 1, взятой из ссылочного документа [1]. Следует упомянуть, что способ перекрытия с суммированием (OLA) также может быть использован, но для краткости будет описан только OLS. Система обозначения, используемая в постановке задачи, является следующей: x(n) является входным сигналом или сигналом дальнего конца, который распространяется через помещение ближнего конца, d(n)=x(n)*h(n) является эхо-сигналом, а y(n)=d(n)+r(n) является сигналом, полученным микрофоном - который, в данном контексте, считается возбуждаемым сигналом ближнего конца, который может быть обозначен как s(n), и фоновым шумом, который может быть обозначен как v(n), так что r(n)=s(n)+v(n). Акустический эхо-тракт между громкоговорителем и микрофоном, обозначенный h(n), моделируется как фильтр конечной импульсной характеристики (фильтр FIR) длиной L. Адаптивный алгоритм используется, чтобы идентифицировать h(n), который необходим, чтобы получить оценку эхо-сигнала,  , где надстрочный индекс ^ обозначает оценку.
, где надстрочный индекс ^ обозначает оценку.
В ссылочном документе [1], акцентируется, что сигнал ошибки, который приводит в действие адаптивный алгоритм, должен быть вычислен во временной области, т.е., e(n)=y(n)- или быть полностью ограничен, если вычисляется в области DFT. Далее, на всем протяжении данного документа понятия 'ограниченный' и 'не ограниченный' относятся только к обновлению градиента,  , которое является результатом корреляции, вычисленной в области DFT. Адаптивный фильтр обновляется посредством
, которое является результатом корреляции, вычисленной в области DFT. Адаптивный фильтр обновляется посредством

где m является индексом временного кадра и g=diag{g} является диагональной матрицей с элементами g, g является окном во временной области, которое исключает нежелательные компоненты в не ограниченном обновлении градиента,  , по его главной диагонали. Следуя определению способа OLS в ссылочном документе [1], входным сигналом в области DFT является X(m)=diag{DFT{x(m)}} и сигнал ошибки обозначается посредством E(m)=DFT{[01×L,eT(m)]T}, с
, по его главной диагонали. Следуя определению способа OLS в ссылочном документе [1], входным сигналом в области DFT является X(m)=diag{DFT{x(m)}} и сигнал ошибки обозначается посредством E(m)=DFT{[01×L,eT(m)]T}, с
x(m)=[x(mR-M+1), …x(mR)]T и e(m)=[e(mR-V+1), …e(mR)]T,
соответственно; где R является сдвигом кадра, входной сигнал имеет точно такую же длину как DFT и V>R является длиной сигнала ошибки. В дополнение, обновление градиента, , уже включает в себя матрицу шага квантования, μ(m), для компактности. Для того чтобы получить L линейных ответвления обновления фильтра, длина DFT должна быть M≥L+V-1. Способы OLS и OLA, описываемые в ссылочном документе [1], определены для V=L, и, следовательно, выбирается M=2L поскольку быстрое преобразование Фурье (FFT) четной длины может быть реализовано более эффективно, чем нечетной. Учитывая определение X(m) и E(m), результирующий будет содержать L+1 линейных компонентов и M-L-1=V-1 компонентов циклического перехода. Тем не менее, для согласованности определяется как,

из чего может быть видно, что оцененный вектор эхо-тракта,

должен быть дополнен нулями, и длина дополнения равна V. Компоненты циклического перехода, как правило, исключаются во временной области, как изображено на Фиг. 1, тем не менее, также существует возможность выбора линейных компонентов посредством умножения не ограниченного обновления фильтра на ограничивающую матрицу в частотной области,

где F является M×M матрицей DFT и G=FgF-1 является ограничивающей матрицей в частотной области. Для того, чтобы проанализировать структуру у G, должно быть определено первое ограничивающее окно во временной области

Далее, вслед за анализом, предусмотренным в ссылочном документе [4], элементами ограничивающей матрицы, G, являются

с G(k, k')=L/M если k=k'; где k и k' являются индексами дискретной частоты и WM=e(-j2π/M) является базисной функцией DFT. Последнее выражение подчеркивает тот факт, что операция является эквивалентной в частной области преобразованию в частотной области (сходной с операцией прореживания). Из выражения (9) можно сделать вывод о том, что если отношение L/M достаточно большое, главная диагональ у G будет доминантой. В дополнение, если M достаточно большое, недиагональные значения будут разлагаться быстро и до незначительных значений, см. ссылочный документ (4).
Фиг. 2 показывает пример устройства адаптивного фильтра в частотной области с делением на блоки. Основанная на делении на блоке формулировка EDAF, впервые предложенная в ссылочном документе [5], обеспечивает более низкую алгоритмическую задержку, чем реализация FDAF без деления. Для того чтобы уменьшить задержку, адаптивны фильтр делится на B блоков длиной N=ceil(L/B), следовательно,

где b обозначает индекс блока. Теперь длина DFT также может быть уменьшена, таким образом, используя способ OLS, чтобы получить N линейных коэффициентов кадры входного сигнала должны быть длиной M≥N+V-1, где V является длиной сигнала ошибки и добавления нулей у h(m) (как уже определено для постановки задачи FDAF). Затем, блок входного сигнала определяется как,

и сигнал ошибки получается посредством вычитания из сигнала микрофона оцененного эха, которое получается как сумма по всем вкладам на блок  , т.е.
, т.е.
где  является окном, которое требуется, чтоб линеаризовать круговую свертку, которая, в остатке, предполагается отлично применяемой. В заключение, обновление блока адаптивного фильтра описывается посредством
является окном, которое требуется, чтоб линеаризовать круговую свертку, которая, в остатке, предполагается отлично применяемой. В заключение, обновление блока адаптивного фильтра описывается посредством

Очевидно, что теперь длина FFT уменьшена, но 2B FFT должны быть выполнены на кадр, чтобы корректно линеаризовать круговые корреляции. В некоторых приложениях желательно или даже необходимо дополнительно уменьшать сложность основанных на делении на блоки адаптивных алгоритмов, и наиболее прямой возможностью является уменьшение количества преобразований на кадр, пропуская ограничивающую операцию. Другой возможностью является упрощение ограничивающей матрицы в частотной области, G. Все же, эти упрощения, обычно, происходят за счет потери производительности алгоритма PB-FDAF.
С другой стороны, если используется постановка задачи без деления, требуется только одно IFFT и одно FFT на кадр, чья длина обычно достаточно продолжительная, чтобы допустить пропуск ограничивающей операции без заметного ослабления производительности. Пропуск ограничивающей операции обычно обозначается как не ограниченный способ. С другой стороны, если используется основанная на деление на блоки постановка задачи, длина FFT уменьшается. Следовательно, ошибка, которая вносится пропуском ограничивающих операций, становится не ничтожно малой, поскольку данная ошибка уваливается с уменьшением M - которое связана с темпом уменьшения не диагональных значений у G.
В прошлом, несколько способов было предложено, чтобы уменьшить сложность алгоритмов PB-FDAF без ослабления производительности. Эти способы будут коротко описаны в нижеследующем. Тем не менее, сначала следует отметить, что ограничивающая операция на блок может быть выполнена двумя путями, т.е.

где выражение (14) может быть интерпретировано как копирование с ошибками циклического перехода до адаптации, а выражение (15) после адаптации. Если используется ограничивающая матрица G без какого-либо упрощения, оба выражения являются математически равными, но являются результатом разных реализаций.
Некоторыми из ранее предложенных способов уменьшения алгоритмической сложности алгоритмов PBFDAF являются
- не ограниченный FDAF и PBFDAF, ссылочные документы [6] и [7]
- альтернативный не ограниченный PBFDAF, ссылочный документ [7]
- альтернированный ограничивающий способ, ссылочный документ [8]
- модифицированный альтернированный ограничивающий способ, ссылочный документ [9].
Целью всех этих способов, как впрочем и изобретения, является уменьшение общего количества FFT на кадр. Ранее упомянутый не ограниченный способ, как предложено в ссылочных документах [6] и [7], непосредственно пропускает ограничивающую операцию, т.е.

Он также может быть применен как предлагается в ссылочном документе [4],

где, Guc= IM×M является масштабированной единичной матрицей, что является эквивалентом рассмотрения только главной диагонали у G. Альтернативный не ограниченный способ, предложенный в ссылочном документе [7], альтернативно ограничивает один блок на кадр, используя выражение (14). Тем не менее, эти три способа непрерывно накапливают ошибки циклического перехода в обновленных коэффициентах фильтра, что уменьшает скорость сходимости.
IM×M является масштабированной единичной матрицей, что является эквивалентом рассмотрения только главной диагонали у G. Альтернативный не ограниченный способ, предложенный в ссылочном документе [7], альтернативно ограничивает один блок на кадр, используя выражение (14). Тем не менее, эти три способа непрерывно накапливают ошибки циклического перехода в обновленных коэффициентах фильтра, что уменьшает скорость сходимости.
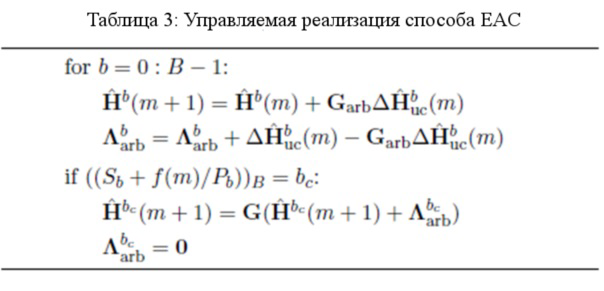
Альтернированный ограничивающий способ использует выражение (15) на вершине не ограниченного алгоритма, как предлагается в ссылочном документе [8]. Посредством этого, исключаются накопленные ошибки циклического перехода между коррекциями. Данный способ обеспечивает дополнительное уменьшение сложности, которое может быть достигнуто, если интервал кадра между коррекциями P, увеличивается. Тогда фильтр обновляется в двух этапах,

где блок bc будет скорректирован только если результат ((m/P))B∈N0, т.е., является не отрицательным натуральным числом.
В ссылочном документе [9], предлагается модифицированный альтернированный ограничивающий способ, который основан на альтернированном ограничивающем способе и также применяется в двух этапах, адаптации и коррекции. Главная новизна способа, описываемого в ссылочных документах [9] и [10], состоит в том, что он использует аппроксимацию ограничивающего окна g, чтобы уменьшать компоненты циклического перехода на блок на этапе адаптации. Предложенной аппроксимацией ограничивающего окна в документе [9] является

для 50% перекрытия. Результирующее окно во временно области является окном приподнятого синуса, которое способно уменьшить ошибки циклического перехода. Тем не менее, линейные коэффициенты также модифицируются и должны быть компенсированы на этапе коррекции, на котором также исключаются ошибки циклического перехода.
Модифицированный альтернированный ограничивающий способ использует компоненты циклического перехода предыдущего и последующего блоков, в документе [10] обозначенные как смежные блоки, чтобы компенсировать ошибки, внесенные в линейные коэффициенты одного блока. Следовательно, необходимо корректировать два блока, чтобы иметь возможность компенсации линейных компонентов одного блока; как следствие, первый и последний блоки не являются полностью компенсированными.
Фиг. 3 иллюстрирует первый вариант осуществления устройства 1 фильтра в частотной области с делением на блоки в соответствии с изобретением в схематическом виде.
Устройство 1 адаптивного фильтра в частотной области с делением на блоки содержит:
адаптивный фильтр 2 в частотной области, выполненный с возможностью фильтрации представления FDS в частотной области входного сигнала IS во временной области в зависимости от набора коэффициентов фильтра, состоящего из множества блоков FB.1, FB.2, FB.B коэффициентов фильтра, для того чтобы создавать отфильтрованный сигнал FS;
множество параллельно организованных блоков 3.1, 3.2, 3.B обновления фильтра, при этом каждый из блоков 3.1, 3.2, 3.B обновления фильтра выполнен с возможностью обновления одного из блоков FB.1, FB.2, FB.B коэффициентов фильтра на основании сигнала обновления US.1, US.2, US.B, собранного посредством круговой корреляции блока BFDS.1, BFDS.2, BFDS.B сигнала FDS представления в частотной области и сигнала FCS управления в частотной области, содержащего представление RFS отфильтрованного сигнала FS;
при этом каждый из блоков 3.1, 3.2, 3.B обновления фильтра содержит модуль 4.1, 4.2, 4.B адаптации, выполненный с возможностью исполнения последовательности AS адаптации (см. Фиг. 5), содержащей этапы
вычисления аппроксимации ограниченного обновления CU.1, CU.2, CU.B градиента для коэффициентов фильтра соответствующего блока FB.1, FB.2, FB.B коэффициентов фильтра посредством применения аппроксимированной ограничивающей матрицы ACM (см. Фиг. 12) с меньшей сложностью, чем ограничивающая матрица FCM, к не ограниченному обновлению градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра, при этом не ограниченное обновление градиента получается из сигнала US.1, US.2, US.B обновления, и
вычисления накопленной ошибки CE.1, CE.2, CE.B, которая вносится в не ограниченное обновление градиента посредством применения аппроксимированной ограничивающей матрицы ACM к не ограниченному обновлению градиента;
при этом каждый из блоков 3.1, 3.2, 3.B обновления фильтра содержит модуль 5.1, 5.2, 5.B коррекции, выполненный с возможностью исполнения последовательности CS коррекции, содержащей этапы
вычисления скорректированного ограниченного обновления CCU.1, CCU.2, CCU.B градиента для коэффициентов фильтра соответствующего блока FB.1, FB.2, FB.B коэффициентов фильтра посредством применения ограничивающей матрицы FCM в частотной области к сумме ограниченного обновления СU.1, CU.2, CU.B градиента и накопленной ошибки CE.1, CE.2, CE.B.
Устройство 1 адаптивного фильтра в частотной области с делением на блоки функционирует следующим образом: входной сигнал IS во временной области преобразуется в сигнал FDS представления в частотной области преобразователем 6 временной области в частотную область. Процессор 7 блока извлекает блоки BFDS.1, BFDS.2, BFDS.B сигнала FDS представления в частотной области, которые сопрягаются, чтобы получить сопряженные блоки BFDS'.1, BFDS'.2, BFDS'.B, которые необходимы, чтобы вычислять корреляцию в области DFT. Сигнал FDS представления в частотной области преобразуется посредством адаптивного фильтра в частотной области в отфильтрованный сигнал FS в частотной области, при этом используются блоки FB.1, FB.2, FB.B коэффициентов фильтра. Отфильтрованный сигнал FS затем преобразуется преобразователем 8 частотной области во временную область в отфильтрованный сигнал FTS во временной области. Впоследствии отфильтрованный сигнал FTS во временной области вычитается из сигнала-который-должен-быть-обработан STP посредством модуля 9 вычитания. Созданный таким образом выходной сигнал OS преобразуется обратно в частотную область преобразователем 10 временной области в частотную область, которое выводит сигнал FCS управления в частотной области, который содержит представление RFS отфильтрованного сигнала FS.
Модуль 11.1 круговой корреляции исполняет круговую корреляцию посредством умножения сигнала FCS управления в частотной области и сопряженного блока BFDS'.1 у сигнала FDS представления в частотной области для того, чтобы создать обновленный сигнал US.1. Таким же образом модуль 11.2 круговой корреляции исполняет круговую корреляцию посредством умножения сигнала FCS управления в частотной области и сопряженного блока BFDS'.2 у сигнала FDS представления в частотной области для того, чтобы создать обновленный сигнал US.2. Сходно модуль 11.B круговой корреляции исполняет круговую корреляцию посредством умножения сигнала FCS управления в частотной области и сопряженного блока BFDS'.B у сигнала FDS представления в частотной области для того, чтобы создать обновленный сигнал US.B.
Каждый из сигналов US.1, US.2 и US.B обновления подается одному из модулей 4.1, 4.2, 4.B адаптации. Каждый из модулей адаптации вычисляет аппроксимацию ограниченного обновления CU.1, CU.2, CU.B градиента и накопленную ошибку CE.1, CE.2, CE.B. Накопленные ошибки CE.1, CE.2, CE.B переадресовываются модулям 5.1, 5.2, 5.B коррекции, тогда как аппроксимация ограниченных обновлений CU.1, CU.2, CU.B градиента может быть переадресована альтернативно модулям 5.1, 5.2, 5.B коррекции или блокам FB.1, FB.2, FB.B коэффициентов фильтра посредством переключения соответствующего переключателя из переключателей 12.1, 12.2, 12.B.
В соответствии с предпочтительным вариантом осуществления изобретения устройство 1 адаптивного фильтра в частотной области с делением на блоки содержит модуль 13 управления последовательностью коррекции, выполненный с возможностью принятия решения, применяется ли и в каком из блоков 3.1, 3.2, 3.B обновления фильтра последовательность CS коррекции после исполнения последовательности AS адаптации.
В дополнительном аспекте изобретение предоставляет способ адаптивной фильтрации, содержащий этапы, на которых:
используют адаптивный фильтр 2 в частотной области для фильтрации представления FDS в частотной области входного сигнала во временной области в зависимости от набора коэффициентов фильтра, состоящего из множества блоков FB.1, FB.2, FB.B коэффициентов фильтра, для того чтобы создавать отфильтрованный сигнал FS;
используют каждый блок 3.1, 3.2, 3.B обновления фильтра из множества параллельно организованных блоков 3.1, 3.2, 3.B обновления фильтра для обновления одного из блоков FB.1, FB.2, FB.B коэффициентов фильтра на основании сигнала US.1, US.2, US.B обновления, собранного посредством круговой корреляции блока BFDS.1, BFDS.2, BFDS.B сигнала FDS представления в частотной области и сигнала FCS управления в частотной области, содержащего представление RFS отфильтрованного сигнала FS;
исполняют последовательность AS адаптации для каждого из блоков 3.1, 3.2, 3.B обновления фильтра посредством использования модуля 4.1, 4.2, 4.B адаптации соответствующего блока 3.1, 3.2, 3.B обновления фильтра, при этом последовательность AS адаптации содержит этапы
вычисления аппроксимации ограниченного обновления CU.1, CU.2, CU.B градиента для коэффициентов фильтра соответствующего блока FB.1, FB.2, FB.B коэффициентов фильтра посредством применения аппроксимированной ограничивающей матрицы ACM с меньшей сложностью, чем ограничивающая матрица FCM, к не ограниченному обновлению градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра, при этом не ограниченное обновление градиента получается из сигнала US.1, US.2, US.B обновления, и
вычисления накопленной ошибки CE.1, CE.2, CE.B, которая вносится в не ограниченный градиент посредством применения аппроксимированной ограничивающей матрицы ACM к не ограниченному обновлению градиента;
выполняют последовательность CS коррекции для каждого из блоков 3.1, 3.2, 3.B обновления фильтра посредством использования модуля 5.1, 5.2, 5.B коррекции соответствующего блока 3.1, 3.2, 3.B обновления фильтра, при этом последовательность CS коррекции содержит этапы
вычисления скорректированного ограниченного обновления CCU.1, CCU.2, CCU.B градиента для коэффициентов фильтра соответствующего блока FB.1, FB.2, FB.B коэффициентов фильтра посредством применения ограничивающей матрицы FCM к сумме аппроксимации ограниченного обновления CU.1, CU.2, CU.B градиента и накопленной ошибки CE.1, CE.2, CE.B.
В другом аспекте изобретение предоставляет компьютерную программу для адаптивной фильтрации, при выполнении на процессоре, исполняющую способ в соответствии с изобретением.
Фиг. 4 иллюстрирует второй вариант осуществления устройства фильтра в частотной области с делением на блоки в соответствии с изобретением в схематическом виде. Для удобства показаны только модуль 4.B адаптации и модуль 5.B коррекции.
В нижеследующем описывается изобретение. Предлагаемый способ применяется в два этапа, как альтернированный ограничивающий способ, и использует произвольное упрощение ограничивающей матрицы, в нижеследующем обозначенное как произвольное ограничивающее окно Garb, чтобы уменьшать компоненты циклического перехода во время адаптации. Тем не менее, он является гибким с точки зрения перекрытия между кадрами и исполнения аппроксимации ограничивающего окна - это справедливо для любой аппроксимации ограничивающего окна. В дополнение, интервал кадра между коррекциями, P, может быть выбран по-разному для каждого блока, который будет обозначен как Pb, поскольку этап коррекции зависит только от прошлых состояний скорректированного блока, а нет от смежных блоков. Чтобы начать с (18b) может быть переформулировано как

что подчеркивает тот факт, что между коррекциями накапливаются обновления градиента. Затем, если произвольная аппроксимация ограничивающей матрицы, Garb, применяется во время адаптации, скорректированное обновление фильтра определяется посредством,

Посредством этого ошибка вносится из расчета на кадр и блок в компоненты линейной корреляции, которая должна быть компенсирована до этапа коррекции, т.е.

Следовательно, приравнивая (20) и (21), получается множитель  компенсации.
компенсации.
Таким образом, может быть интерпретирован в качестве накопленной ошибки, которая вносится в ограниченное обновление градиента посредством применения аппроксимированной ограничивающей матрицы. Предлагаемый способ обобщается в Таблице 2.
Процедура является следующей. Сначала, используется произвольная аппроксимация ограничивающего окна в частотной области, чтобы улучшить процесс адаптации, и обновляется накопленная разность . Затем, например, каждые Pb кадры, используется, чтобы воссоздавать не ограниченное обновление фильтра, перед исключением компонентов циклического перехода. В заключение, накопленная разность сбрасывается в ноль. Затем, линейные компоненты полностью корректируются, используя только ошибку, которая вносится в блок, который-должен-быть-скорректирован, bc, в прошлом. Таким образом, реализация предлагаемого ограничивающего способа может быть легко распараллелена. Таблица 2 предоставляет псевдо-код для реализации последовательности адаптации и последовательности коррекции в соответствии с изобретением. Ограничивающий способ в соответствии с изобретением также может именоваться улучшенным альтернированным ограничивающим способом.
Фиг. 5 иллюстрирует ограничивающую операцию в соответствии с изобретением в схематическом виде. Несмотря на то, что как последовательность AS адаптации, так и последовательность CS коррекции исполняются в частотной области, графики показывают эквивалентные элементы взвешивания с использованием финитной функции во временной области.
Предлагаемый способ схематично изображен для одного блока на Фиг. 5, с Garb=Gs и 50% перекрытием кадра (перекрытием блока во временной области). Выбор ограничивающего окна и Pb будет, конечно, влиять на производительность адаптивного алгоритма и итоговую алгоритмическую сложность.
Исполнение аппроксимации ограничивающего окна может быть сделано гибким. Например, может быть принято в расчет лимитированное количество T пар не диагональных элементов у G. Посредством этого, аналог во временной области может становиться отрицательным. Этого можно избежать, если требуется, посредством добавления смещения к окну во временной области, и соответственно модифицируя Garb. Другой возможностью является исполнение окна во временной области, и использование его аналога в частотной области.
Фиг. 6 предоставляет пример ограничивающих окон во временной области, соответствующих разным ограничивающим матрицам, при этом предполагается перекрытие окон в 50%.
Фиг. 7 предоставляет примеры ограничивающих окон во временной области, соответствующих разным ограничивающим матрицам, при этом предполагается перекрытие окон в 75%.
Фиг. 6a и 7a изображают аппроксимированные окна, полученные с учетом лимитированного количества недиагональных элементов у G, что эквивалентно учету меж-полосных корреляций. Фиг. 6b и 7b изображают расширения Gs как определено в выражении (19), добавляющие T-1 пар недиагональных элементов к Gs. Для ясности, следует упомянуть, что  означает (Gs)2.
означает (Gs)2.
Сложность, которая вносится применением этих окон, пропорциональна количеству пар недиагональных элементов T, используемых для исполнения Gab. Более того, наименьшая сложность получается, если значения по недиагональным элементам являются реальными или чисто мнимыми. В заключение, предлагаемый способ не является гибким только в отношении аппроксимации окон и перекрытия между кадрами, но в дополнение, для фиксированного перекрытия, Gab может модифицироваться интерактивно. Это может быть желательным, если достигается определенная производительность, если присутствует внезапная потребность в дальнейшем уменьшении сложности - например, если используемое устройство переходит а режим энергосбережения - или если процесс адаптивной фильтрации должен быть повторно инициализирован, например, из-за обнаружения изменения эхо-тракта.
Фиг. 8 показывает принцип работы первого варианта осуществления модуля управления последовательностью коррекции в форме блок-схемы.
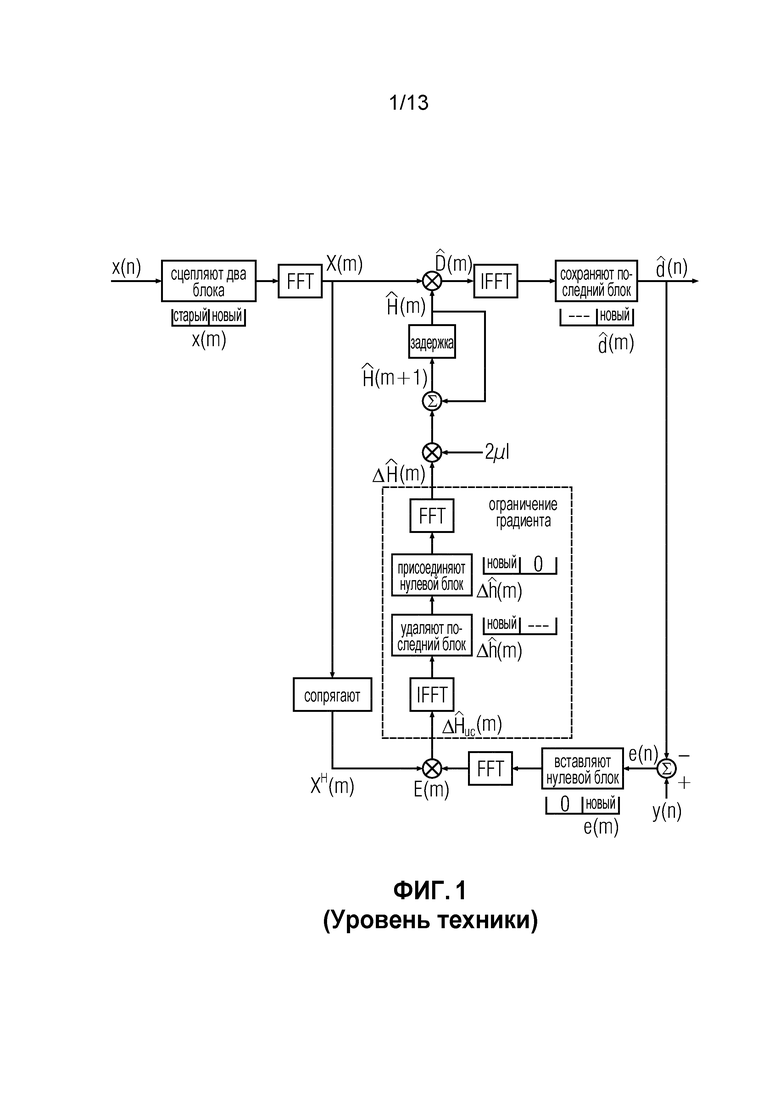
Следует отметить, что очередность и частота, с которой корректируются блоки, может быть исполнена гибким образом, и может быть модифицирована интерактивно. Следовательно, один вариант осуществления настоящего изобретения предлагается с процедурой AS обновления градиента и процедурой CS коррекции, как описано в Таблице 3 и изображено на Фиг. 8.
Затем решение, должен ли корректироваться блок и какой блок, задается посредством ((Sb+f(m)/Pb))B=bc, с bc=(0, 1, …, B-1); где Sb является множителем смещения, который определяет очередность, в которой начинаются коррекции, а f(m) является функцией счетчика. Управление или сброс функции счетчика может осуществляться, например, средством обнаружения изменения эхо-тракта (EPC), см. например ссылочный документ [11], как изображено на Фиг. 10, или на основании измерения сигнала ошибки, например, нормализованной среднеквадратичной ошибки (NMSE). Как уже упоминалось, Pb определяет частоту, с которой корректируется каждый блок. Некоторые возможные схемы для интервалов коррекции, для Sb=0 ∀b, изображены на Фиг. 11.
Фиг. 9 предоставляет примеры схем CSC коррекции.
В соответствии с предпочтительным вариантом осуществления изобретения, модуль 13 управления последовательностью коррекции выполнен с возможностью принятия решения, применяется ли и в каком из блоков 3.1, 3.2, 3.B обновления фильтра последовательность CS коррекции на основании накопленных ошибок блоков 3.1, 3.2, 3.B обновления фильтра.
В соответствии с предпочтительным вариантом осуществления изобретения модуль 13 управления последовательностью коррекции содержит схему CSC коррекции, определяющую для каждого из блоков 3.1, 3.2, 3.B обновления фильтра количество последовательностей AS адаптации, после которого последовательность коррекции CS применяется в соответствующем разделе 3.1, 3.2, 3.B фильтра.
В соответствии с предпочтительным вариантом осуществления изобретения для каждого из блоков 3.1, 3.2, 3.B обновления фильтра количество последовательностей AS адаптации, после которого последовательность CS коррекции применяется в соответствующем разделе 3.1, 3.2, 3.B фильтра, сокращается в ответ на изменение сигнала FCS управления в частотной области, которое превышает пороговую величину.
В соответствии с предпочтительным вариантом осуществления изобретения для каждого из блоков 3.1, 3.2, 3.B обновления фильтра количество последовательностей AS адаптации, после которого последовательность CS коррекции применяется в соответствующем разделе 3.1, 3.2, 3.B фильтра, динамически адаптируется на основании измерения сигнала FCS управления в частотной области.
Очередность, в которой корректируются блоки может быть исполнена гибким образом, например, на основании энергии накопленной разности каждого блока, т.е.,  . Следует отметить, что чем выше энергия накопленной разности одного блока, тем больше ошибка, которая вносится в линейные компоненты. Далее, прирост производительности может быть получен посредством коррекции сначала блоков FB.1, FB.2, FB.B с наивысшими накопленными разностями.
. Следует отметить, что чем выше энергия накопленной разности одного блока, тем больше ошибка, которая вносится в линейные компоненты. Далее, прирост производительности может быть получен посредством коррекции сначала блоков FB.1, FB.2, FB.B с наивысшими накопленными разностями.
Фиг. 10 показывает принцип работы второго варианта осуществления модуля управления последовательностью коррекции в форме блок-схемы.
В соответствии с предпочтительным вариантом осуществления изобретения устройство 1 адаптивного фильтра в частотной области с делением на блоки содержит модуль 14 обновления аппроксимированной ограничивающей матрицы, выполненный с возможностью динамической адаптации сложности произвольной ограничивающей матрицы.
В соответствии с предпочтительным вариантом осуществления изобретения модуль 14 обновления аппроксимированной ограничивающей матрицы выполнен с возможностью динамической адаптации сложности аппроксимированной ограничивающей матрицы ACM в зависимости от измерения сигнала FCS управления в частотной области.
В соответствии с предпочтительным вариантом осуществления изобретения, модуль 14 обновления аппроксимированной ограничивающей матрицы выполнен с возможностью увеличения сложности аппроксимированной ограничивающей матрицы ACM в ответ на изменение сигнала FCS управления в частотной области, которое превышает пороговую величину.
Необходимо подчеркнуть, что для предлагаемого способа ни указываются ни аппроксимация ограничивающего окна, ни перекрытие кадров, поскольку они могут быть исполнены произвольно. Более того, даже возможно использование разных аппроксимаций ограничивающих матриц и интервалов кадра между последовательностями CS коррекции для каждого блока FB.1, FB.2, FB.B (количество последовательностей AS адаптации, после которого последовательность CS коррекции применяется в соответствующем блоке фильтра). Эти параметры могут быть модифицированы интерактивно в зависимости, например, от средства 15 обнаружения изменения эхо-тракта (средство обнажения EPC) или от измерения сигнала FCS управления в частотной области, как, например, нормализованной среднеквадратичной ошибки (NMSE), как изображено на Фиг. 12.
Изобретение обеспечивает гибкость с точки зрения почти всех параметров исполнения, т.е., аппроксимированной ограничивающей матрицы ACM, перекрытия кадров, очередности коррекций и разного интервала между коррекциями для каждого блока. Более того, для фиксированного перекрытия кадров, все другие параметры исполнения могут быть модифицированы интерактивно без необходимости в повторной инициализации адаптивного алгоритма. Это позволяет управлять компромиссом между алгоритмической сложностью и скоростью сходимости у устройства PBFDAF. Тем не менее, алгоритмическая сложность будет в высокой степени зависеть как от исполнения аппроксимированной ограничивающей матрицы ACM, так и схемы коррекции для каждого блока.
Фиг. 11 предоставляет примеры окон во временной области и их соответствующих ограничивающих матриц в частотной области. Фиг. 11(a) иллюстрирует ограничивающую матрицу FCM, тогда как Фиг. 11(b) и Фиг. 11(c), каждая иллюстрирует аппроксимированную ограничивающую матрицу ACM с меньшей сложностью, чем ограничивающая матрица FCM. Значения в оттенках серого соответствуют значениям элементов соответствующей матрицы.
Фиг. 12 иллюстрирует первый вариант осуществления устройства для подавления эхо-сигнала у входного сигнала во временной области в соответствии с изобретением в схематическом виде. Устройство 16 содержит устройство 1 адаптивного фильтра в частотной области с делением на блоки, при этом устройство 1 адаптивного фильтра в частотной области с делением на блоки, содержащее:
адаптивный фильтр 2 в частотной области, выполненный с возможностью фильтрации сигнала FDS представления в частотной области входного сигнала IS во временной области в зависимости от набора коэффициентов фильтра, состоящего из множества блоков FB.1, FB.2, FB.B коэффициентов фильтра, для того чтобы создавать отфильтрованный сигнал FS;
преобразователь 8 частотной области во временную область, выполненный с возможностью преобразования отфильтрованного сигнала FS в оцененный эхо-сигнал FES, представляющий собой оценку эхо-сигнала ES во временной области;
модуль 9 вычитания для создания выходного сигнала OS посредством вычитания оцененного эхо-сигнала FES из сигнала-который-должен-быть-обработан STP, содержащего эхо-сигнал ES;
множество параллельно организованных блоков 3.1, 3.2, 3.B обновления фильтра, при этом каждый из блоков 3.1, 3.2, 3.B обновления фильтра выполнен с возможностью обновления одного из блоков FB.1, FB.2, FB.B коэффициентов фильтра на основании сигнала US.1, US.2, US.B обновления, собранного посредством круговой корреляции блока BFDS.1, BFDS.2, BFDS.B сигнала FDS представления в частотной области и сигнала FCS управления в частотной области, содержащего представление отфильтрованного сигнала FS;
при этом каждый из блоков 3.1, 3.2, 3.B обновления фильтра содержит модуль 4.1, 4.2, 4.B адаптации, выполненный с возможностью исполнения последовательности AS адаптации, содержащей этапы
вычисления аппроксимации ограниченного обновления CU.1, CU.2, CU.B градиента для коэффициентов фильтра соответствующего блока FB.1, FB.2, FB.B коэффициентов фильтра посредством применения аппроксимированной ограничивающей матрицы ACM с меньшей сложностью, чем ограничивающая матрица FCM, к не ограниченному обновлению градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра, при этом не ограниченное обновление градиента получается из сигнала US.1, US.2, US.B обновления, и
вычисления накопленной ошибки CE.1, CE.2, CE.B, которая вносится в не ограниченный градиент посредством применения аппроксимированной ограничивающей матрицы ACM к не ограниченному обновлению градиента;
при этом каждый из блоков 3.1, 3.2, 3.B обновления фильтра содержит модуль 5.1, 5.2, 5.B коррекции, выполненный с возможностью исполнения последовательности CS коррекции, содержащей этапы
вычисления скорректированного ограниченного обновления CCU.1, CCU.2, CCU.B градиента для коэффициентов фильтра соответствующего блока FB.1, FB.2, FB.B коэффициентов фильтра посредством применения ограничивающей матрицы FCM в частотной области к сумме аппроксимации ограниченного обновления CU.1, CU.2, CU.B градиента и накопленной ошибки CE.1, CE.2, CE.B.
Устройство 1 адаптивного фильтра в частотной области с делением на блоки на Фиг. 12 эквивалентно устройству 1 адаптивного фильтра в частотной области с делением на блоки, которое обсуждалось выше. В примере на Фиг. 12 эхо звуковой сигнал SES, который может содержать речь дальнего конца, создается громкоговорителем LS, на который подается входной сигнал IS. Микрофон MI получает эхо звуковой сигнал SES, как впрочем и требуемый звуковой сигнал SWS, который может содержать речь ближнего конца и фоновый шум так, что сигнал-который-должен-быть-обработан STP содержит эхо-сигнал ES, основанный на эхо звуковом сигнале SES, и требуемый сигнал WS, основанный на требуемом звуковом сигнале SWS. Поскольку оцененный эхо-сигнал EES вычитается из сигнала-который-должен-быть-обработан STP, эхо-сигнал ES эффективно подавляется в выходном сигнале OS.
В отношении устройств и способов описанных вариантов осуществления, следует упомянуть следующее:
Несмотря на то, что некоторые аспекты были описаны в контексте устройства, очевидно, что эти аспекты также представляют собой описание соответствующего способа, где блок или устройство соответствует этапу способа или признаку этапа способа. Аналогично, аспекты, описанные в контексте этапа способа также представляют собой описание соответствующего блока или элемента или признака соответствующего устройства.
В зависимости от определенных требований к реализации, варианты осуществления изобретения могут быть реализованы в аппаратном обеспечении или в программном обеспечении. Реализация может быть осуществлена, используя цифровой запоминающий носитель информации, например, гибкий диск, DVD, CD, ROM, PROM, EPROM, EEPROM или флэш-память, с хранящимися на нем электрически читаемыми сигналами управления, которые кооперируют (или выполнены с возможностью кооперации) с программируемой компьютерной системой так, что выполняется соответствующий способ.
Некоторые варианты осуществления в соответствии с изобретением содержат носитель данных с электрически читаемыми сигналами управления, которые выполнены с возможностью кооперации с программируемой компьютерной системой так, что выполняется один из способов, описанный в данном документе.
В целом, варианты осуществления настоящего изобретения могут быть реализованы в качестве компьютерного программного продукта с программным кодом, при этом программный код работает для выполнения одного из способов, когда компьютерный программный продукт работает на компьютере. Программный код может, например, быть сохранен на машиночитаемом носителе.
Другие варианты осуществления содержат компьютерную программу для выполнения одного из способов, описываемых в данном документе, которая хранится на машиночитаемом носителе или не временном запоминающем носителе информации.
Другими словами, вариант осуществления способа изобретения является, вследствие этого, компьютерной программной с программным кодом для выполнения одного из способов, описываемых в данном документе, когда компьютерная программа работает на компьютере.
Дополнительный вариант осуществления способа изобретения является, вследствие этого, носителем данных (или цифровым запоминающим носителем информации, или машиночитаемым носителем информации), содержащим, записанную на нем, компьютерную программу для выполнения одного из способов, описываемых в данном документе.
Дополнительный вариант осуществления способа изобретения является, вследствие этого, потоком данных или последовательностью сигналов, представляющей собой компьютерную программу для выполнения одного из способов, описываемых в данном документе. Поток данных или последовательность сигналов может быть выполнена с возможностью, например, передачи через соединение для передачи данных, например, через Интернет.
Дополнительный вариант осуществления содержит средство обработки, например, компьютер, или устройство с программируемой логикой, в частности процессор, содержащий аппаратное обеспечение сконфигурированное или адаптированное, чтобы выполнять один из способов, описываемых в данном документе.
Дополнительный вариант осуществления содержит компьютер с инсталлированной на нем компьютерной программой для выполнения одного из способов, описываемых в данном документе.
В некоторых вариантах осуществления, устройство с программируемой логикой (например, программируемая вентильная матица) может быть использовано, чтобы выполнять некоторые или все из функциональных возможностей способов, описываемых в данном документе. В некоторых вариантах осуществления, программируемая вентильная матрица может кооперировать с микропроцессором для того, чтобы выполнять один из способов, описываемых в данном документе. В целом, способы преимущественно выполняются любым устройством аппаратного обеспечения.
Несмотря на то, что данное изобретение было описано с точки зрения нескольких вариантов осуществления, присутствуют изменения, перестановки, и эквиваленты, которые лежат в рамках объема данного изобретения. Следует отметить, что существует много альтернативных путей реализации способов и композиций настоящего изобретения. Вследствие этого предполагается, что нижеследующая приложенная формула изобретения должна интерпретироваться, как включающая в себя все такие изменения, перестановки и эквиваленты, как лежащие в рамках истиной сущности и объема настоящего изобретения.
Ссылочные обозначения:
1 устройство адаптивного фильтра в частотной области с делением на блоки
2 адаптивный фильтр в частотной области
3 блок обновления фильтра
4 модуль адаптации
5 модуль коррекции
6 преобразователь временной области в частотную область
7 процессор блока
8 преобразователь частотной области во временную область
9 модуль вычитания
10 преобразователь временной области в частотную область
11 модуль круговой корреляции
12 переключатель
13 модуль управления последовательностью коррекции
14 модуль обновления аппроксимированной ограничивающей матрицы
15 средство обнаружения изменения эхо-тракта
16 устройство для подавления эхо-сигнала
FDS сигнал представления в частотной области
IS входной сигнал во временной области
FB блок коэффициентов фильтра
FS отфильтрованный сигнал
US сигнал обновления
BFDS блок сигнала представления в частотной области
BFDS' сопряженный блок сигнала представления в частотной области
FCS сигнал управления в частотной области
RFS представление отфильтрованного сигнала
CU аппроксимация ограниченного обновления градиента
CE накопленная ошибка
CCU скорректированное ограниченное обновление градиента
FTS отфильтрованный сигнал во временной области
STP сигнал-который-должен-быть-обработан
OS выходной сигнал
CSC схема коррекции
AS последовательность адаптации
CS последовательность коррекции
FCM ограничивающая матрица
ACM аппроксимированная ограничивающая матрица
EES оцененный эхо-сигнал
ES эхо-сигнал
WS требуемый сигнал
LS громкоговоритель
MI микрофон
Ссылочные документы:
[1]. J. Shynk, «Frequency-domain and multirate adaptive filtering,» IEEE Signal Process. Mag., том. 9, №. 1, стр. 14-37, Январь 1992.
[2] S. Haykin, Adaptive Filter Theory, 4-ое издание. Prentice-Hall, 2002.
[3] A. Oppenheim и R. W. Schafer, Digital Signal Processing, 2-ое издание. Prentice-Hall Inc., Энглвуд Клифф, Нью-Джерси, 1993.
[4] J. Benesty и D. R. Morgan, «Frequency-domain adaptive filtering revisited, generalization to the multi-channel case, and application to acoustic echo cancellation,» in Proc. IEEE ICASSP, том. 2, стр. 289-292, 2000.
[5] P. C. W. Sommen, «Partitioned frequency-domain adaptive filters,» in Proc. Asilomar Conf. on Signals, Systems and Computers, стр. 677-681, 1989.
[6] D. Mansour и A. J. Gray, Jr, «Unconstrained frequency-domain adaptive filter,» IEEE Trans. Acoust., Speech, Signal Process., том. 30, №. 5, стр. 726-734, Октябрь 1982.
[7] J. S. Soo и K. K. Pang, «Multidelay block frequency domain adap-tive filter,» IEEE Trans. Acoust., Speech, Signal Process., том. 38, стр. 373-376, Февраль 1990.
[8] M. Joho и G. S. Moschytz, «Connecting partitioned frequency-domain filters in parallel or in cascade,» IEEE Trans. Circuits Syst. II, том. 47, №. 8, стр. 685-697, Август 2000.
[9] R. M. M. Derkx, G. P. M. Engelmeers, и P. C. W. Sommen, «New constraining method for partitioned block frequency-domain adaptive filters,» IEEE Trans. Signal Process., том. 50, №. 3, стр. 2177-2186, 2002.
[10] «Partitioned block frequency domain adaptive filter,» Голландский Европейский Патент PCT/EP2001/009 625, 13 августа 2001г.
[11] M. A. Iqbal и S. L. Grant, «A novel normalized cross-correlation based echo-path change detector,» в 2007 IEEE Region 5 Confer-ence, Fayetteville, AR, стр. 249-251, Апрель 2007.
Изобретение относится к адаптивным фильтрам в частотной области с делением на блоки. Технический результат заключается в расширении арсенала средств того же назначения. В адаптивном фильтре обеспечивают возможность фильтрации представления в частотной области входного сигнала во временной области в зависимости от набора коэффициентов фильтра, состоящего из множества блоков коэффициентов фильтра, для того чтобы создавать отфильтрованный сигнал, при этом фильтр содержит множество параллельно организованных блоков обновления фильтра, при этом каждый из блоков обновления фильтра выполнен с возможностью обновления одного из блоков коэффициентов фильтра на основании сигнала обновления, собранного посредством круговой корреляции блока сигнала представления в частотной области и сигнала управления в частотной области, содержащего представление отфильтрованного сигнала. 3 н. и 8 з.п. ф-лы, 12 ил.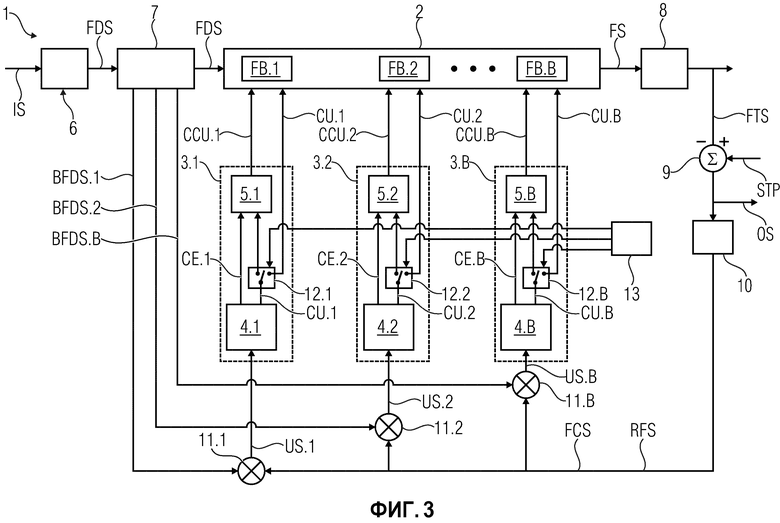
1. Устройство адаптивного фильтра в частотной области с делением на блоки, содержащее:
адаптивный фильтр (2) в частотной области, выполненный с возможностью фильтрации представления (FDS) в частотной области входного сигнала (IS) во временной области в зависимости от набора коэффициентов фильтра, состоящего из множества блоков (FB.1, FB.2, FB.B) коэффициентов фильтра, для того чтобы создавать отфильтрованный сигнал (FS);
множество параллельно организованных блоков (3.1, 3.2, 3.B) обновления фильтра, при этом каждый из блоков (3.1, 3.2, 3.B) обновления фильтра выполнен с возможностью обновления одного из блоков (FB.1, FB.2, FB.B) коэффициентов фильтра на основании сигнала (US.1, US.2, US.B) обновления, собранного посредством круговой корреляции блока (BFDS.1, BFDS.2, BFDS.B) сигнала (FDS) представления в частотной области и сигнала (FCS) управления в частотной области, содержащего представление (RFS) отфильтрованного сигнала (FS);
при этом каждый из блоков (3.1, 3.2, 3.B) обновления фильтра содержит модуль (4.1, 4.2, 4.B) адаптации, выполненный с возможностью исполнения последовательности (AS) адаптации, содержащей этапы
вычисления аппроксимации ограниченного обновления (CU.1, CU.2, CU.B) градиента для коэффициентов фильтра соответствующего блока (FB.1, FB.2, FB.B) коэффициентов фильтра посредством применения аппроксимированной ограничивающей матрицы (ACM) с меньшей сложностью, чем ограничивающая матрица (FCM), к неограниченному обновлению градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра, при этом неограниченное обновление градиента получается из сигнала обновления (US.1, US,2, US.B), и
вычисления накопленной ошибки (CE.1, CE.2, CE.B), которая вносится в неограниченное обновление градиента посредством применения аппроксимированной ограничивающей матрицы (ACM) к неограниченному обновлению градиента;
при этом каждый из блоков (3.1, 3.2, 3.B) обновления фильтра содержит модуль (5.1, 5.2, 5.B) коррекции, выполненный с возможностью исполнения последовательности (CS) коррекции, содержащей этапы
вычисления скорректированного ограниченного обновления (CCU.1, CCU.2, CCU.B) градиента для коэффициентов фильтра соответствующего блока (FB.1, FB.2, FB.B) коэффициентов фильтра посредством применения ограничивающей матрицы (FCM) к сумме аппроксимации ограниченного обновления (CU.1, CU.2, CU.B) градиента и накопленной ошибки (CE.1, CE.2, CE.B).
2. Устройство адаптивного фильтра в частотной области с делением на блоки по предшествующему пункту, при этом устройство (1) адаптивного фильтра в частотной области с делением на блоки содержит модуль (13) управления последовательностью коррекции, выполненный с возможностью принятия решения, применяется ли и в каком из блоков (3.1, 3.2, 3.B) обновления фильтра последовательность (CS) коррекции после исполнения последовательности (AS) адаптации.
3. Устройство адаптивного фильтра в частотной области с делением на блоки по предшествующему пункту, в котором модуль (13) управления последовательностью коррекции выполнен с возможностью принятия решения, применяется ли и в каком из блоков (3.1, 3.2, 3.B) обновления фильтра последовательность (CS) коррекции на основании накопленных ошибок блоков (3.1, 3.2, 3.B) обновления фильтра.
4. Устройство адаптивного фильтра в частотной области с делением на блоки по п. 2, в котором модуль (13) управления последовательностью коррекции содержит схему (CSC) коррекции, определяющую для каждого из блоков (3.1, 3.2, 3.B) обновления фильтра количество последовательностей (AS) адаптации, после которого последовательность (CS) коррекции применяется в соответствующем разделе (3.1, 3.2, 3.B) фильтра.
5. Устройство адаптивного фильтра в частотной области с делением на блоки по предшествующему пункту, в котором для каждого из блоков (3.1, 3.2, 3.B) обновления фильтра количество последовательностей (AS) адаптации, после которого последовательность (CS) коррекции применяется в соответствующем блоке (3.1, 3.2, 3.B) фильтра, сокращается в ответ на изменение сигнала (FCS) управления в частотной области, которое превышает пороговую величину.
6. Устройство адаптивного фильтра в частотной области с делением на блоки по п. 4, в котором для каждого из блоков (3.1, 3.2, 3.B) обновления фильтра количество последовательностей (AS) адаптации, после которого последовательность (CS) коррекции применяется в соответствующем блоке (3.1, 3.2, 3.B) фильтра, динамически адаптируется на основании измерения сигнала управления (FCS) в частотной области.
7. Устройство адаптивного фильтра в частотной области с делением на блоки по п. 1, при этом устройство (1) адаптивного фильтра в частотной области с делением на блоки содержит модуль (14) обновления аппроксимированной ограничивающей матрицы, выполненный с возможностью динамической адаптации сложности аппроксимированной ограничивающей матрицы.
8. Устройство адаптивного фильтра в частотной области с делением на блоки по предшествующему пункту, в котором модуль (14) обновления аппроксимированной ограничивающей матрицы выполнен с возможностью динамической адаптации сложности аппроксимированной ограничивающей матрицы (ACM) в зависимости от измерения сигнала (FCS) управления в частотной области.
9. Устройство адаптивного фильтра в частотной области с делением на блоки по п. 7, в котором модуль (14) обновления аппроксимированной ограничивающей матрицы выполнен с возможностью увеличения сложности аппроксимированной ограничивающей матрицы (ACM) в ответ на изменение сигнала (FCS) управления в частотной области, которое превышает пороговую величину.
10. Устройство для подавления эхо-сигнала (ES) у входного сигнала (IS) во временной области, при этом упомянутое устройство (16) содержит устройство (1) адаптивного фильтра в частотной области с делением на блоки, причем устройство (1) адаптивного фильтра в частотной области с делением на блоки содержит:
адаптивный фильтр (2) в частотной области, выполненный с возможностью фильтрации представления (FDS) в частотной области входного сигнала (IS) во временной области в зависимости от набора коэффициентов фильтра, состоящего из множества блоков (FB.1, FB.2, FB.B) коэффициентов фильтра, для того чтобы создавать отфильтрованный сигнал (FS);
преобразователь (8) из частотной области во временную область, выполненный с возможностью преобразования отфильтрованного сигнала (FS) в оцененный эхо-сигнал (EES), представляющий собой оценку эхо-сигнала (ES) во временной области;
модуль (9) вычитания для создания выходного сигнала (OS) посредством вычитания оцененного эхо-сигнала (EES) из сигнала-который-должен-быть-обработан (STP), содержащего эхо-сигнал (ES);
множество параллельно организованных блоков (3.1, 3.2, 3.B) обновления фильтра, при этом каждый из блоков (3.1, 3.2, 3.B) обновления фильтра выполнен с возможностью обновления одного из блоков (FB.1, FB.2, FB.B) коэффициентов фильтра на основании сигнала (US.1, US.2, US.B) обновления, собранного посредством круговой корреляции блока (BFDS.1, BFDS.2, BFDS.B) сигнала (FDS) представления в частотной области и сигнала (FCS) управления в частотной области, содержащего представление отфильтрованного сигнала (FS);
при этом каждый из блоков (3.1, 3.2, 3.B) обновления фильтра содержит модуль (4.1, 4.2, 4.B) адаптации, выполненный с возможностью исполнения последовательности (AS) адаптации, содержащей этапы
вычисления аппроксимации ограниченного обновления (CU.1, CU.2, CU.B) градиента для коэффициентов фильтра соответствующего блока (FB.1, FB.2, FB.B) коэффициентов фильтра посредством применения аппроксимированной ограничивающей матрицы (ACM) с меньшей сложностью, чем ограничивающая матрица (FCM), к неограниченному обновлению градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра, при этом неограниченное обновление градиента получается из сигнала (US.1, US.2, US.B) обновления, и
вычисления накопленной ошибки (CE.1, CE.2, CE.B), которая вносится в неограниченный градиент посредством применения аппроксимированной ограничивающей матрицы (ACM) к неограниченному обновлению градиента;
при этом каждый из блоков (3.1, 3.2, 3.B) обновления фильтра содержит модуль (5.1, 5.2, 5.B) коррекции, выполненный с возможностью исполнения последовательности (CS) коррекции, содержащей этапы
вычисления скорректированного ограниченного обновления (CCU.1, CCU.2, CCU.B) градиента для коэффициентов фильтра соответствующего блока (FB.1, FB.2, FB.B) коэффициентов фильтра посредством применения ограничивающей матрицы (FCM) к сумме аппроксимации ограниченного обновления (CU.1, CU.2, CU.B) градиента и накопленной ошибки (CE.1, CE.2, CE.B).
11. Способ адаптивной фильтрации, содержащий этапы, на которых:
используют адаптивный фильтр (2) в частотной области для фильтрации представления (FDS) в частотной области входного сигнала во временной области в зависимости от набора коэффициентов фильтра, состоящего из множества блоков (FB.1, FB.2, FB.B) коэффициентов фильтра, для того чтобы создавать отфильтрованный сигнал (FS);
используют каждый блок (3.1, 3.2, 3.B) обновления фильтра из множества параллельно организованных блоков (3.1, 3.2, 3.B) обновления фильтра для обновления одного из блоков (FB.1, FB.2, FB.B) коэффициентов фильтра на основании сигнала (US.1, US.2, US.B) обновления, собранного посредством круговой корреляции блока (BFDS.1, BFDS.2, BFDS.B) сигнала (FDS) представления в частотной области и сигнала (FCS) управления в частотной области, содержащего представление (RFS) отфильтрованного сигнала (FS);
исполняют последовательность (AS) адаптации для каждого из блоков (3.1, 3.2, 3.B) обновления фильтра посредством использования модуля (4.1, 4.2, 4.B) адаптации соответствующего блока (3.1, 3.2, 3.B) обновления фильтра, при этом последовательность (AS) адаптации содержит этапы
вычисления аппроксимации ограниченного обновления (CU.1, CU.2, CU.B) градиента для коэффициентов фильтра соответствующего блока (FB.1, FB.2, FB.B) коэффициентов фильтра посредством применения аппроксимированной ограничивающей матрицы (ACM) с меньшей сложностью, чем ограничивающая матрица (FCM), к неограниченному обновлению градиента для коэффициентов фильтра соответствующего блока коэффициентов фильтра, при этом неограниченное обновление градиента получается из сигнала (US.1, US.2, US.B) обновления, и
вычисления накопленной ошибки (CE.1, CE.2, CE.B), которая вносится в неограниченный градиент посредством применения аппроксимированной ограничивающей матрицы (ACM) к неограниченному обновлению градиента;
выполняют последовательность (CS) коррекции для каждого из блоков (3.1, 3.2, 3.B) обновления фильтра посредством использования модуля (5.1, 5.2, 5.B) коррекции соответствующего блока (3.1, 3.2, 3.B) обновления фильтра, при этом последовательность (CS) коррекции содержит этапы
вычисления скорректированного ограниченного обновления (CCU.1, CCU.2, CCU.B) градиента для коэффициентов фильтра соответствующего блока (FB.1, FB.2, FB.B) коэффициентов фильтра посредством применения ограничивающей матрицы (FCM) в частотной области к сумме аппроксимации ограниченного обновления (CU.1, CU.2, CU.B) градиента и накопленной ошибки (CE.1, CE.2, CE.B).
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| ИЗМЕРЕНИЕ СХОДИМОСТИ АДАПТИВНЫХ ФИЛЬТРОВ | 1996 |
|
RU2180984C2 |
| КОДИРУЮЩИЕ ДИНАМИЧЕСКИЕ ФИЛЬТРЫ | 2003 |
|
RU2302707C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 7292661 B1, 06.11.2007. | |||

