Изобретение относится к области радиолокации, конкретно к способу пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции (РЛС) с активной фазированной антенной решеткой (АФАР) и может найти применение в широком классе РЛС с АФАР, установленных на мобильных платформах различного назначения.
Ранее /1-14/ при синтезе обнаружителей радиолокационных сигналов считалось, что сигнал и помеха, поступающие на вход приемника РЛС с выхода антенны, являются функциями единственной переменной - времени.
Реально /12/ радиолокационный сигнал является электромагнитной волной, зависящей как от времени, так и от координат пространства. Особое значение эта зависимость имеет при приеме сигналов АФАР. Наличие пространственных параметров сигнала цели и их отличие от аналогичных параметров помех позволяет осуществлять эффективную селекцию (выделение) сигналов на фоне помех и значительно повысить качество обнаружения полезных радиолокационных сигналов. Задача пространственно-временной обработки заключается в поиске алгоритмов и реализующих их архитектур оптимальной обработки пространственно-временных сигналов на фоне помех.
При байесовской процедуре синтеза оптимального весового вектора обработки, связанной с обращением ковариационной матрицы помех, алгоритм становится существенно неустойчивым к погрешностям производимых вычислений. Это обстоятельство вынуждает искать альтернативные способы фильтрации, не требующие обращения плохо обусловленных матриц.
Поиск новых алгоритмов обработки часто связан и с недостатком априорных сведений о статистических характеристиках помех и сигналов. Такая ситуация имеет место при временной обработке радиолокационного сигнала на фоне собственного шума и пассивных внешних помех, порождаемых отражениями от земной, морской поверхности и различных метеообразований. Спектрально-корреляционные свойства этих помех бывают, как правило, известны лишь приблизительно, в результате чего приходится прибегать к их более или менее реалистической аппроксимации и затем на ее основе проводить синтез обработки. Качество получаемой таким способом фильтрации процесса напрямую зависит от степени близости ее структуры к байесовскому алгоритму при наличии полной статистической информации о сигнально-помеховой обстановке.
Одним из наиболее перспективных направлений решения проблемы защиты каналов приема от комбинированных помех является формирование глубоких провалов (нулей) в диаграмме направленности (ДН) антенны РЛС.
Прямые методы адаптации, связанные с обращением или псевдообращением ковариационной матрицы (КМ) помех, состоят в определении весового вектора (амплитудно-фазового распределения) на основе знания КМ помех и направляющего вектора. Операция нахождения весового вектора достаточно трудоемкая, требует относительно больших временных затрат и связана с обращением матрицы или решением системы уравнений. [11]. К прямым алгоритмам относятся алгоритмы непосредственного обращения оценочной КМ помехи, рекуррентного обращения выборочной КМ помехи (непосредственное итерационное уточнение обратной КМ) и алгоритм последовательной декорреляции помехи, основанный на процедуре ортогонализации Грама-Шмидта.
Известно, что при использовании прямых методов вычислений при числе выборок, используемых для оценки КМ, большем удвоенного числа степеней управления, потери в среднем отношении сигнал-помеха при замене матрицы ее выборочной оценкой не превышают 3 дБ. Это существенно (на несколько порядков) меньше, чем при использовании градиентных методов. Важным достоинством прямых методов является независимость скорости сходимости алгоритмов от соотношения мощностей и пространственного распределения источников помех [9,10]. Однако, еще одной важной проблемой является негативное влияние множества отраженных от морской поверхности лучей в радиотехнических системах радиолокации.
Пространственно-временная обработка (STAP) является современным развитием методов адаптации диаграмм направленности АФАР, которая одновременно обрабатывает сигналы принятые множеством приемопередающих элементов антенной решетки (пространственная область) и пачки сигналов (временная область) на промежутке когерентного накопления [12].
Пространственно-временная обработка существенно улучшает возможности РЛС на подвижной платформе. Во-первых, данный метод позволяет обнаруживать объекты с малой скоростью путем улучшения подавления пассивных помех в главном лепестке диаграммы направленности. Во-вторых, STAP позволяет обнаруживать цели с малой эффективной площадью рассеивания, которые маскируются пассивными помехами, принятыми по боковым лепесткам ДН. В-третьих, STAP обеспечивает обнаружение целей в условиях комбинированных активных и пассивных помех. Кроме того, STAP обладает свойством робастности к системным ошибкам и не стационарности помехового фона.
Впервые пространственно-временная обработка в приложении к РЛС была опубликована в работе Brennan и Reed [8] в 1973, в которой описывался оптимальный пространственно-временной фильтр. Развитию методов STAP посвящена работа Klemm [7], с попыткой анализа степеней свободы пассивных помех применительно к РЛС самолетного базирования. Развитие цифровой обработки сигналов создает условия для реализации пространственно-временной адаптивной обработки в реальном времени и как следствие повышение интереса к области STAP. Современные работы по реализации пространственно-временной адаптивной обработки фокусируются, прежде всего, на разработке и исследовании эффективных вычислительных алгоритмов. Одним из направлений в моноимпульсной радиолокации является использование суммарно-разностной STAP на основе пространственно-лучевой после доплеровской фильтрации с разнесенными фильтрами и двухступенчатым занулением.
Преимуществами такого подхода следует считать:
1. Экономическая привлекательность - минимизация количества цифровых приемных каналов. Позволяет существенно повысить надежность и снизить стоимость технического обслуживания за счет упрощения архитектуры и взаимосвязей элементов системы.
2. Эффективность использования данных - оценка ковариационных матриц выполняется на ограниченной выборке даже в условиях нестационарного окружения в котором другие архитектуры STAP теряют свою эффективность, которую демонстрируют при априорных знаниях статистического распределения плотности пассивных помех.
3. Упрощение калибровки каналов - проблема калибровки приемных каналов является основной задачей при построении адаптивных систем с пространственно-временной обработкой, которая связана с согласованием полосы пропускания сигналов и направляющими векторами элементов антенны. Поскольку каналы не идентичны с точки зрения амплитудно-частотных характеристик поэтому пространственно-элементная STAP требует дорогостоящей системы калибровки. Уменьшение пространственных степеней свободы ведет к существенному снижению количества формируемых адаптивных весовых коэффициентов. В противоположность этой архитектуре суммарно-разностная STAP имеет два хорошо структурированных канала и соответствующие направляющие вектора с калибровкой, определяющей положение нуля разностного канала.
4. Оптимизация формы диаграммы направленности - адаптивное построение диаграммы направленности может привести к высокому уровню боковых лепестков в угловых положениях свободных от помех и существенной потери коэффициента усиления в основном луче диаграммы направленности и смещению направления главного луча, что ведет к дополнительным избыточным степеням свободы и оценке ассоциированных ошибок. Суммарно-разностная STAP с пространственной степенью свободы равной 1 и положением нуля разностных ДН предполагает однозначное получение желаемой формы ДН в отличие от других архитектур STAP с большим числом степеней свободы.
5. Уменьшение вычислительной сложности - процесс адаптивной пространственно-временной обработки требует значительных вычислительных мощностей технологической аппаратуры. Суммарно-разностный STAP существенно снижает требования к объему вычислений адаптации.
6. Возможность применения к существующим моноимпульсным радиолокационным системам - адаптивное подавление пассивных помех в совместном «угол-доплер» пространстве может интегрироваться в существующие РЛС с АФАР или зеркальными антеннами с дополнительной цифровой обработкой разностного канала и модификацией для синтеза разностного канала за счет небольших капитальных вложений при существенном улучшении возможностей по подавлению комбинированных помех.
Однако существуют ограничения в применении суммарно-разностной адаптивной пространственно-временной обработки, а именно:
1. Пространственная неоднозначность - любая двухканальная система имеет существенный недостаток в степенях свободы для эффективного подавления пассивных помех и в любом случае проявляющаяся вследствие низкой частоты повторения импульсов и высоких доплеровских частот пассивных помех при высокой скорости движения несущей платформы РЛС.
2. Рассогласование диаграмм направленности - поскольку наличие в разностных диаграммах направленности глубокого минимума в пространстве боковых лепестков суммарной диаграммы направленности приводит к низкой эффективности подавления пассивных помех. Таким образом суммарная и разностные диаграммы направленности должны быть оптимизированы.
3. Подавление активных помех - подавление активных помех не является функцией суммарно-разностной адаптивной пространственно-временной обработки. Таким образом необходимо предварительное подавление активных помех с организацией вспомогательных каналов.
4. Ограниченная возможность точности измерений - разностные каналы не свободны от сигналов отражений от пассивных помех. Требуется доплеровская фильтрация помех и целей.
По этим причинам необходима разработка способа оптимизации суммарно-разностной адаптивной пространственно-временной обработки радиосигналов в моноимпульсных корабельных РЛС с АФАР, свободных от указанных ограничений.
В известном уровне техники таких способов пространственно-временной обработки радиосигналов для подавления активных и пассивных помех не выявлено.
Задачей изобретения является разработка способа пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой (АФАР).
Техническим результатом - повышение степени подавления активных и пассивных помех в моноимпульсных корабельных РЛС с АФАР.
Сущность изобретения.
Решение поставленной задачи и достижение заявленного технического результата обеспечивается тем, что способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой (АФАР), включает прием радиосигналов от цели на фоне активных и пассивных помех с помощью АФАР. Принятые сигналы преобразуют в цифровую форму. Далее проводят двухступенчатую адаптивную пространственно-временную обработку принятых радиосигналов одновременно по суммарным и разностным каналам. Затем пороговую их обработку и обнаружение цели на фоне активных и пассивных помех. На первой ступени обработки проводят обработку сигналов «активная помеха плюс шум», принятых элементами АФАР и свободных от сигналов пассивных отражений. Формируют пространственно ковариационную матрицу «Ф» обработанных сигналов. По данным матрицы «Ф» создают в цифровой форме адаптивную диаграмму направленности (ДН) АФАР с созданием глубоких нулей в направлении активных помех. Далее на второй ступени адаптивной обработки сигналов подавляют пассивные помехи путем допплеровской фильтрации и многооконной обработки сигналов с помощью адаптивной ДН АФАР, сформированной на этапе подавления активных помех.
Такая пространственно-временная адаптивная двухступенчатая обработка сигналов позволяет последовательно во времени подавить активные помехи и затем использовать результаты первого этапа адаптивной обработки подавить и пассивные помехи. Следствием этого является повышение степени подавления активных и пассивных помех в моноимпульсных корабельных РЛС с АФАР не менее, чем на 15%. Одновременно упрощается алгоритм обработки сигналов и сокращается более, чем в 2 раза время на подавление активных и пассивных помех.
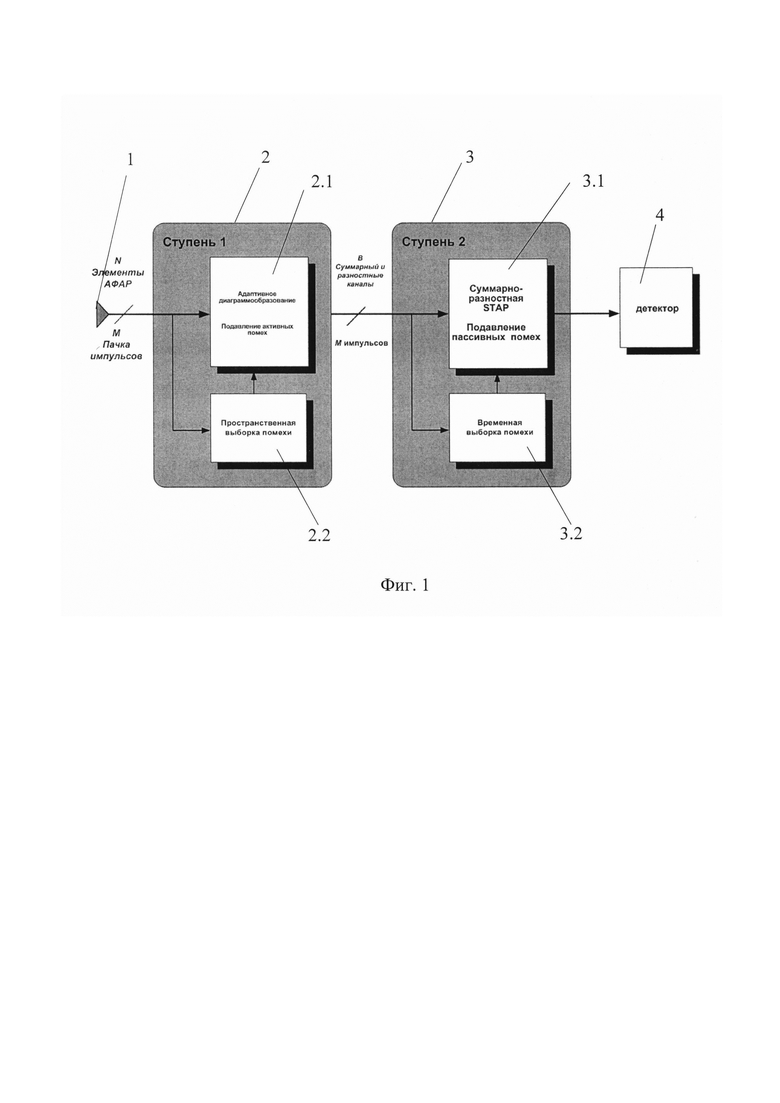
Сущность изобретения поясняется рисунками, представленными на фиг. 1 - фиг. 3.
На фиг. 1 - представлена двухступенчатая блок схема адаптивной обработки сигналов по зануленю комбинированных (активных плюс пассивных) помех; на фиг. 2 - блок схема первой ступени адаптивной обработки сигналов по подавлению активных помех; на фиг. 3 - блок схема второй ступени адаптивной обработки сигналов по подавлению пассивных помех.
Раскрытие сущности изобретения
Согласно фиг. 1 - фиг. 3 способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой (АФАР), включает прием радиосигналов от цели на фоне активных и пассивных помех с помощью АФАР 1. Принятые АФАР 1 сигналы преобразуют в цифровую форму (на фигурах не показано). Далее проводят двухступенчатую 2-3 адаптивную пространственно-временную обработку принятых радиосигналов одновременно по суммарным и разностным каналам. Затем пороговую их обработку и обнаружение цели на фоне активных и пассивных помех. На первой 2 ступени обработки проводят обработку сигналов «активная помеха плюс шум», принятых элементами АФАР и свободных от сигналов пассивных отражений. Формируют 2.2 пространственно ковариационную матрицу «Ф» обработанных сигналов. По данным матрицы «Ф» создают 2.1 в цифровой форме адаптивную диаграмму направленности (ДН) АФАР с созданием глубоких нулей в направлении активных помех. Далее на второй 3 ступени адаптивной обработки сигналов подавляют 3.1 пассивные помехи путем допплеровской фильтрации и многооконной обработки 3.2 сигналов с помощью адаптивной ДН АФАР, сформированной на этапе 2 подавления активных помех.
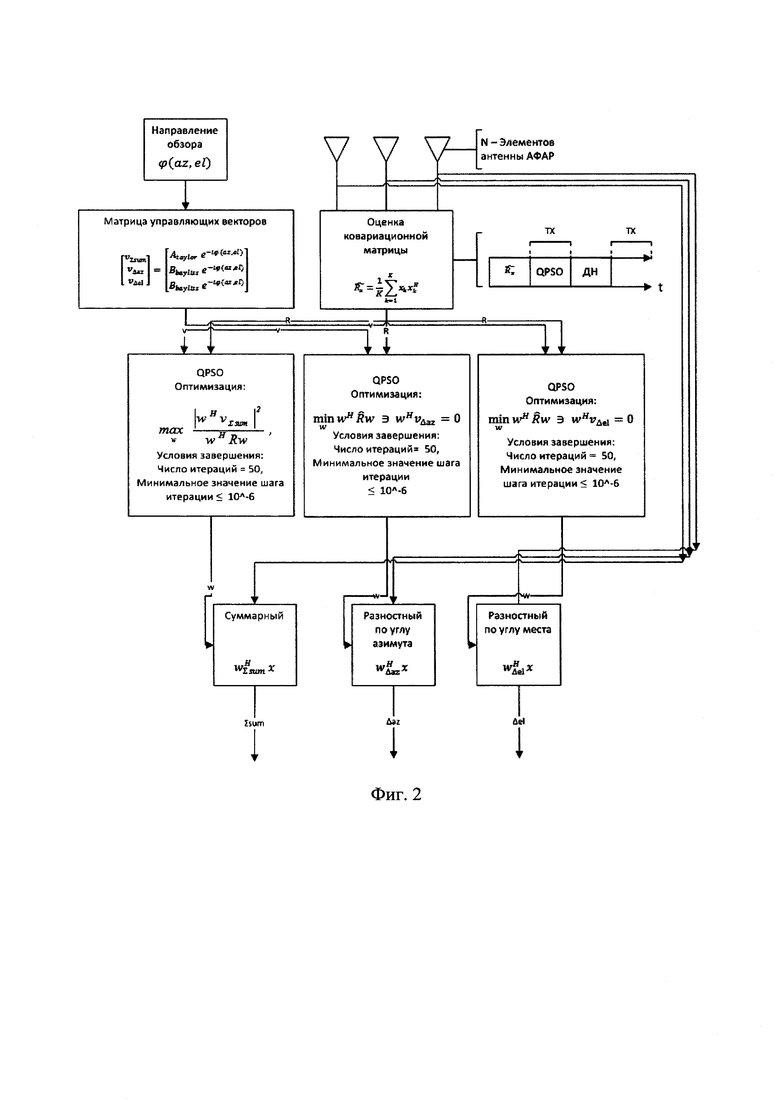
Формирование адаптивной диаграммы направленности (ДН) АФАР с созданием глубоких нулей в направлении активных помех проводят на первой 2 ступени обработки в азимутальной и угломестной плоскости путем оконной свертки (фиг. 2) сигналов с использованием коэффициентов распределения Бейлиса.
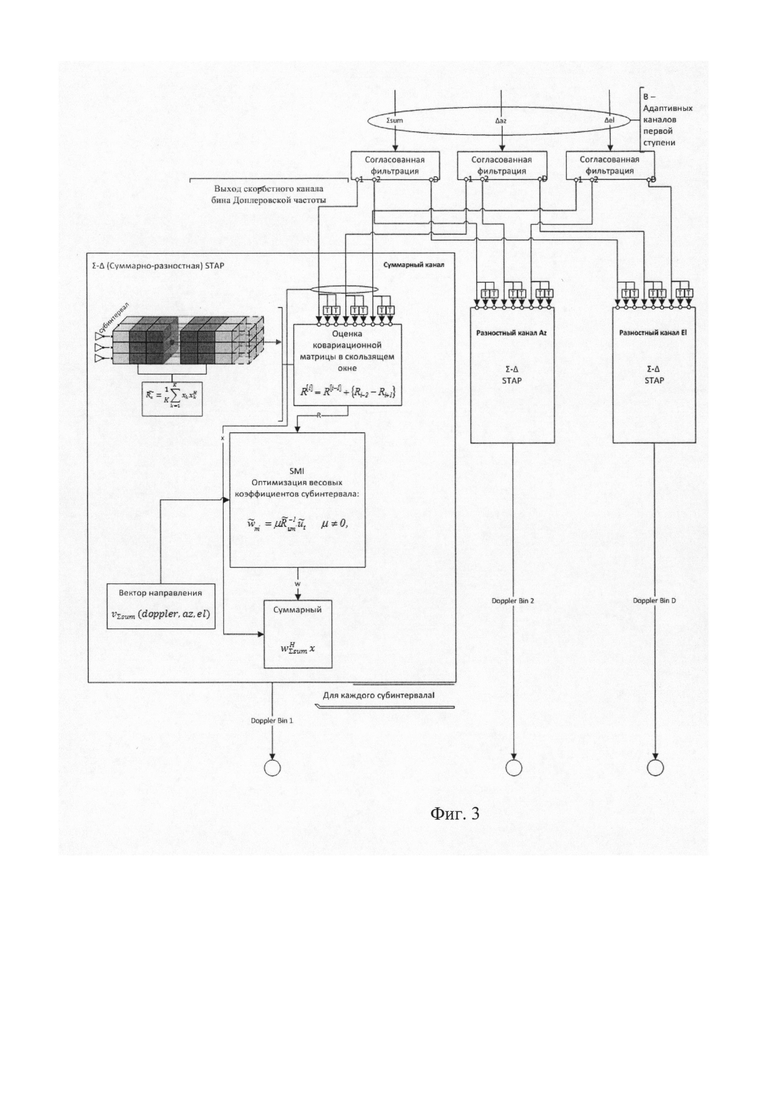
Многооконную обработку сигналов на второй 3 ступени обработки проводят (фиг. 3) с помощью множества параллельных согласованных фильтров 3.2 с последующей когерентной обработкой результатов фильтрации и формированием 3.1 ковариационной матрицы пассивных помех. В свою очередь формирование ковариационной матрицы проводят методом скользящего окна с группированием дискрет матрицы по правилу умножения Кронекера.
На первой 2 ступени адаптивной обработки сигналы вначале подвергают доплеровской фильтрации с помощью банка пространственно-временных фильтров. Фильтры формируют путем каскадирования вычислителей весов пространственного диаграммообразования каждого импульса и временных доплеровских фильтров в каждом сформированном луче. Отфильтрованные сигналы затем адаптивно суммируют для получения выходного отклика отдельного дискрета (бина) частоты Доплера. Процесс выполняют для каждого бина в диапазоне нормированной частоты Доплера. Совместная процедура диаграммообразования и после доплеровской фильтрации когерентной пачки обеспечивает существенное подавление активных помех при условии их предварительной локализации в пространстве до адаптации и последующую адаптацию к пассивным помехам в каждом целевом доплеровском бине.
Формально указанная архитектура 3.1 процессора STAP Tm размерностью MN×K для адаптивной обработки m бина (М - количество импульсов в пачке, N - количество элементов АФАР, K - размерность выборки) может быть реализована на основе двух типов, описываемых выражениями (1) и (2).

В выражении (1) Fm - M×Kt представляет собой матрицу доплеровских фильтров, а  - матрицу диаграммообразования N×Ks, K=KtKs
- матрицу диаграммообразования N×Ks, K=KtKs
Данный тип алгоритма (2) обработки 2.1 (фиг. 1 - фиг. 2) сигналов является сепарабельным (разделимым), поскольку содержит множество вычислителей диаграммообразования лучей ДН на каждый импульс пачки и множество доплеровских фильтров в каждом сформированном луче ДН.
Второй тип алгоритма (2) обработки 2.2 (фиг. 1- фиг. 2) формируется путем выбора некоторого множества выходов сепарабельного процессора, в котором F - М×М, G - N×N, и Jm - MN×K формирующие матрицы подмножеств фильтров в пространстве «угол-доплер».
Преобразования в данном алгоритме также сепарабельны поскольку матрицы селекции обладают свойством сепарабельности. Оба типа архитектуры процессоров могут реализовать процедуру двухступенчатого зануления помех.
На первой 2 ступени обработки сигналов, принятых элементами АФАР 1 (активная помеха плюс шум), свободных от сигналов мешающих отражений оценивается пространственная ковариационная матрица (3

В каждом субинтервале когерентного накопления, матрица Фjn используется для конструирования адаптивных ДН АФАР 1 с формированием глубоких нулей в направлении активных помех как части общего алгоритма пространственно-лучевого преобразования. На второй 3 ступени результирующий отклик лучей, с подавлением сигналов активных помех используется для адаптации подавления пассивных помех.
Результирующие отклики диаграмм направленности лучей с подавлением активной помехи используются затем на второй 3 ступени пространственно-временной обработки подавления пассивных помех.

где  - желаемая ДН АФАР луча при отсутствии активных помех.
- желаемая ДН АФАР луча при отсутствии активных помех.
Исходя из этих положений предложенный способ реализует двух ступенчатую 2-3 вычислительную архитектуру суммарно-разностной адаптивной обработки на основе реализации оптимизационного метода биологическим алгоритмом квантового поведения популяции частиц.
Ступень 1 (фиг. 1 - фиг. 2) Синтез адаптивных суммарной и разностных диаграмм направленности АФАР.
На этой ступени процесс адаптации суммарной и разностных диаграмм направленности направлен на генерацию оптимальных весовых коэффициентов диаграммообразования с целью минимизации ошибок между требуемым и актуальным принятыми сигналами и максимизации отношения сигнал/шум в направлении визирования с подавлением в направлении помех. Известно множество методов адаптации на основе алгоритмов LMS, СМА, SMI, MVDR, GA, PSO [6]. Сравнительный анализ показывает, что адаптивное диаграммообразование с использованием биологического алгоритма PSO обеспечивает усиление в главном лепестке ДН на уровне 0 дБ с подавлением помех до уровня от -20 дБ до -50 дБ и поддерживает низкий уровень боковых лепестков. Кроме того, основным преимуществом PSO над стохастическими и другими оптимизационными методами является относительная простота, заключающаяся в возможности настройки только оператора скорости для отыскания оптимума функции в гиперпространстве. Известны несколько модификаций классического PSO применительно к антенным решеткам и его комплексированию с другими методами в которых сделаны попытки увеличить скорость сходимости и эффективности поиска экстремума. Однако как было доказано Bergh [6], PSO не гарантирует глобальной сходимости алгоритма в соответствии с выбранным оптимизационным критерием.
Рассматривается плоская антенная решетка 1 с границами лежащими в плоскости xy, координаты каждого элемента (подрешетки) АФАР 1 соответствуют

где dx=dy=d - расстояние между элементами (подрешетками). Тогда множитель антенной решетки определяется известным выражением

где Imn - коэффициенты возбуждения и 
Формирование суммарной диаграммы направленности выполняют с использованием вещественных числовых коэффициентов разложения ряда Тейлора

Формирование разностных диаграмм направленности в азимутальной и угломестной плоскости выполняется с использованием коэффициентов распределения Бейлиса

И из условия симметричности

Основываясь на положении квантовой механики и траектории движения частиц в алгоритме PSO (Particle Swarm Optimization) [5] используется новый предложенный вариант PSO - PSO с квантовоподобным поведением частиц движущихся в многопараметрическом поисковом пространстве с вектором скорости динамически изменяемым согласно наличию собственной информации и взаимодействию с другими частицами QPSO (Quantum Behaved Particle Swarm Optimization) [3].
Алгоритм QPSO обладает некоторыми характеристиками, которые отличны от PSO и делают его более привлекательным с точки зрения адаптации ДН АФАР. Во-первых, введение экспоненциального распределения позиций частиц приводит к глобальной сходимости алгоритма. Во-вторых, дополнение в виде среднего наилучшей позиции является явным улучшением QPSO. В классическом PSO каждая частица стремится к глобальной наилучшей позиции без внимания к движению остальных частиц популяции. В алгоритме QPSO с наличием среднего наилучшей позиции популяция частиц никогда не покидает отстающую от оптимизационного движения частицу, что существенно ближе соответствует интеллектуальному поведению социума и увеличивает оптимизационную эффективность QPSO многократно.
Таким образом, каждая отдельная частица представляется элементарной частицей движущейся в квантовом пространстве и вероятность нахождения частицы на позиции пространства  при выполнении вычислений на итерации t определяется выбранной функцией плотности вероятности |ψ(х,t)|2, форма которой определяет потенциальное поле нахождения частицы. В соответствии с методом Монте Карло частица движется по следующим правилам, описываемым выражениями (10-12)
при выполнении вычислений на итерации t определяется выбранной функцией плотности вероятности |ψ(х,t)|2, форма которой определяет потенциальное поле нахождения частицы. В соответствии с методом Монте Карло частица движется по следующим правилам, описываемым выражениями (10-12)

если randν≥0.5

если randν<0.5,
где

параметр α определяет коэффициент сжатия-растяжения,  и randν - случайные числа равномерно распределенные в интервале [0,1], mbest - глобальная виртуальная точка называемая главным направлением или средним наилучшим, вычисляемым по формуле
и randν - случайные числа равномерно распределенные в интервале [0,1], mbest - глобальная виртуальная точка называемая главным направлением или средним наилучшим, вычисляемым по формуле

Коэффициент сжатия растяжения изменяется во времени по правилу, представленному отношением (14)

где α0 и α1 - начальное и конечное значение α соответственно, Т - максимальное значение вычислительных итераций, t - номер текущей итерации поиска экстремума. Сходимость алгоритма достигается в случае когда каждая частица оказывается в своей локальной точке притяжения pi=(pi,1, pi,2, …, pi,D), координаты которых для каждой итерации определяются выражением

где  c1 и с2 - два положительных коэффициента ускорения движения частицы,
c1 и с2 - два положительных коэффициента ускорения движения частицы,  и
и  - два случайных числа равномерно распределенных на интервале [0,1].
- два случайных числа равномерно распределенных на интервале [0,1].
Процедура применения QPSO к процессу адаптации суммарной и разностных диаграмм направленности АФАР 1 на первой стадии к комбинированному помеховому фону выполняется независимо в суммарном и разностных ДН в соответствии с итерационным алгоритмом оптимизации и максимальным количеством итераций 50.
Функции приспособленности с одной стороны задают из условия обеспечения максимального отношения сигнал шум в направлении визирования суммарной ДН с другой стороны минимизации выходной мощности с ограничениями усиления в разностных ДН. А именно, для суммарного канала:

для разностных каналов:

где w - независимые весовые коэффициенты в суммарном и разностных азимутальном и угломестном каналах, R - статистическая оценка ковариационной матрицы с процедурой диагонального подшумления в интервале, предшествующем излучению зондирующего импульса, v - направляющий вектор с учетом амплитудного взвешивания коэффициентами Тейлора А и Бейлиса [BE, BH]. Таким образом выполняется процедура подавления активной помехи с использованием без ограничения степеней свободы для каждого периода повторения импульсов.
Сигналы суммарного и разностных каналов обрабатываются во всем возможном диапазоне доплеровских частот согласованными фильтрами по методу оконной свертки БПФ перекрытия с добавлением (overlap-add) [4]. В предлагаемой системе общее количество в каждом канале параллельных доплеровских фильтров равно K=2М+1, в котором MF0 - соответствует согласованной фильтрации сигнала с нулевым доплеровским сдвигом частоты, MF1 - для сигнала с доплеровским сдвигом F1 и MFM для доплеровского сдвига FM. Поскольку направление движения цели априорно неизвестно фильтры выстраиваются симметрично относительно F0, то есть имеется фильтр как для Fk так и для F-k k=1,2…M.
Ступень 2 (фиг. 1 - фиг. 3). После доплеровская адаптивная суммарно-разностная пространственно-временная обработка.
Используют многооконную после доплеровскую STAP 3.1, включающую множество параллельных согласованных фильтров в обработке пачки импульсных эхо сигналов в каждом канале [2]. Каждый фильтр в каналах представляет окно для Kt субитервалов для интервала когерентного накопления М. Процесс адаптации оперирует с небольшим Kt субитервалом из Ks откликов суммарного и разностных каналов. Таким образом размерность задачи определяется размерностью в K=KsKt и составляет Ks=3 и Kt<<M (Kt выбирается в пределах 2-4), чем собственно и достигается существенное сокращение размерности. Процессор после каждого согласованного фильтра производит конвейерную адаптацию раздельно для каждого субинтервала с последующей когерентной обработкой результатов всех импульсов субитервалов (0 : Kt-1,1 : Kt,…,M-Kt : M-1). Вектор весовых коэффициентов для каждого субинтервала т вычисляется по формуле для критерия максимизации отношения сигнал шум

где  - выборочная ковариационная матрица пассивных помех размерностью KsKt×KsKt, равная
- выборочная ковариационная матрица пассивных помех размерностью KsKt×KsKt, равная

Выборка χ1 покрывает дискреты интервала дальности окружающие анализируемый дискрет, за исключением самого дискрета и смежных предшествующих, и последующих защитных дискрет  Для всех анализируемых дискрет приемного строба для сокращения объема вычислений ковариационная матрица оценивается методом скользящего окна с группированием [1].
Для всех анализируемых дискрет приемного строба для сокращения объема вычислений ковариационная матрица оценивается методом скользящего окна с группированием [1].
Вектор  - вычисляется по правилу умножения Кронекера
- вычисляется по правилу умножения Кронекера

где w=ƒdTr - произведение значения частоты Доплера отклика согласованного фильтра на частоту повторения импульсов.
Результаты адаптивной обработки ступени 2 далее в блоке 4 детектируют и передают на пороговую обработку сигналов с постоянной вероятностью ложных тревог (на фигурах не показано). В результате пороговой обработки обнаруживаются полезные сигналы от цели, свободные от активных и пассивных помех. Далее обнаруженные сигналы от цели передаются на траекторную обработку и отображаются на экране РЛС.
Промышленная применимость
Изобретение разработано на уровне математической модели пространственно-временной адаптивной обработки сигналов для моноимпульсной корабельной радиолокационной станции (РЛС) с активной фазированной антенной решеткой (АФАР).
Разрабатывается технологический образец устройства, реализующего предлагаемый способ адаптивной обработки сигналов
Литература
1. Yoshinari Iwakura, Junichiro Suzuki, Hiroyoshi Yamada, An Efficient Sliding Window Processing for the Covariance Matrix Estimation, Graduate School of Science and Technology, Niigata University. Japan 2006
2. S.D. Blunt. J. Jakabosky, J. Metcalf, J. Stiles, B. Himed, "Multiwaveform STAP," IEEE Radar Conf., Ottawa, Canada, Apr.-May 2013.
3. L.D. Coelho, A quantum particle swarm optimizer with chaotic mutation operator, Chaos, Solitons and Fractals 37 (2008).
4. Selesnick, I.W. & Burrus, C.S. "Fast Convolution and Filtering"Digital Signal Processing Handbook Ed. Vijay K. Madisetti and Douglas B. WilliamsBoca Raton: CRC Press LLC, 1999
5. J. Kennedy, R. Mendes, Population structure and particle swarm performance, 2002, pp. 1671-1676.
6. M. Rangaswamy, F. Lin, and K. Gerlach, "Robust adaptive signal processing methods for heterogeneousradar clutter scenarios", Signal Processing, vol. 84, pp. 1653-1665,2004.
7. KLEMM, R.: 'Principles of space-time adaptive processing' (IEE Publishing, London, UK, 2002, 2nd edn.)
8. BRENNAN, L.E. and REED, L.S.: 'Theory of Adaptive Radar', IEEE Trans.Aerosp. Electron. Syst, March 1973, 9, pp. 237-252
9. Трифонов А.П. Совместное различение сигналов и оценка их параметров/Трифонов А.П., Шинаков Ю.С. - М.: Радио и связь, 1986. - 266 с.
10. Караваев В.В. Статистическая теория пассивной локации / Караваев В.В., Сазонов В.В. - М.: Радио и связь, 1987. - 237 с.
11. Пространственно-временная обработка сигналов / Кремер И.Я., Кремер А.И., Петров В.М. и др.; Под ред. Кремера И.Я. - М.: Радио и связь, 1984. - 224 с.
12. Волосюк В.К., Гуляев Ю.В. и др. Современные методы оптимальной обработки пространственно-временных сигналов в активных, пассивных и комбинированных активно-пассивных радиотехнических системах // Радиотехника и электроника, 2014, том 59, №2, с. 109-131.
13. США, патент № US 9971027 B1, G01S 13/5244, G01S 7/2813, G01S 13/5246, Н04В 7/0848;
14. США, патент № US 6720910 В2, G01S 13/52, G01S 13/00
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи | 2020 |
|
RU2740296C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ | 2011 |
|
RU2455658C1 |
| Способ подавления помех в адаптивной антенной решётке | 2023 |
|
RU2831658C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях | 2019 |
|
RU2704789C1 |
| Способ адаптивной обработки сигналов в модульной фазированной антенной решетке | 2016 |
|
RU2629921C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ СИГНАЛОВ, ПРИНИМАЕМЫХ ПО БОКОВЫМ ЛЕПЕСТКАМ (ВАРИАНТЫ) | 2006 |
|
RU2319168C1 |
| Способ формирования помехи типа "антипод" | 2021 |
|
RU2777922C1 |
| Способ измерения углового положения наземных неподвижных радиоконтрастных объектов | 2017 |
|
RU2672092C1 |
Изобретение предназначено для подавления в основном луче и боковых лепестках диаграммы направленности антенны (ДНА) комбинированных помех (смеси активных и пассивных помех) в радиолокационных системах (РЛС) корабельного базирования, имеющих активные фазированные антенные решетки (АФАР). Способ обеспечивает двухступенчатую обработку трехмерного потока данных от элементов (подрешеток) приемной антенны (N пространственных каналов на М принятых импульсов и на К элементов разрешения по дальности) с целью поэтапного формирования адаптивных весовых коэффициентов пространственных минимумов, создаваемых для разных направлений активных помех и значений доплеровских частот в разных элементах дальности. Применение полученных весовых коэффициентов к потоку данных позволяет сформировать набор независимых ДНА, управлять ими в пространстве и обрабатывать их как в пространстве, так и во времени для повышения эффективности обнаружения и измерения координат локации надводных и воздушных объектов в условиях неопределенности помеховой обстановки. Изобретение позволяет повысить степень подавления активных и пассивных помех в моноимпульсных корабельных РЛС с АФАР не менее чем на 15%. Одновременно упрощается алгоритм обработки сигналов и сокращается более чем в 2 раза время на подавление активных и пассивных помех в корабельных РЛС. 3 з.п. ф-лы, 3 ил.
1. Способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой (АФАР), характеризующийся тем, что с помощью АФАР принимают радиосигналы от цели на фоне активных и пассивных помех, преобразуют принятые сигналы в цифровую форму, далее осуществляют адаптивную двухступенчатую пространственно-временную обработку цифровых сигналов одновременно по суммарным и разностным каналам, их пороговую обработку и обнаружение цели на фоне помех, причем на первой ступени адаптивной обработки проводят обработку сигналов «активная помеха плюс шум», принятых элементами АФАР и свободных от сигналов пассивных отражений, далее формируют пространственно-ковариационную матрицу «Ф» обработанных сигналов, по данным матрицы «Ф» формируют в цифровой форме адаптивную диаграмму направленности (ДН) АФАР с созданием глубоких нулей в направлении активных помех, затем на второй ступени адаптивной обработки сигналов подавляют пассивные помехи путем допплеровской фильтрации и многооконной обработки сигналов адаптивной ДН АФАР, сформированной на первой ступени обработки сигналов.
2. Способ по п. 1, отличающийся тем, что формирование адаптивной диаграммы направленности (ДН) АФАР с созданием глубоких нулей в направлении активных помех проводят на первой ступени обработки в азимутальной и угломестной плоскости путем оконной свертки сигналов с использованием коэффициентов распределения Бейлиса.
3. Способ по п. 1, отличающийся тем, что многооконную обработку сигналов на второй ступени обработки проводят с помощью множества параллельных согласованных фильтров с последующей когерентной обработкой результатов фильтрации и формированием ковариационной матрицы пассивных помех.
4. Способ по п. 3, отличающийся тем, что формирование ковариационной матрицы проводят методом скользящего окна с группированием дискрет матрицы по правилу умножения Кронекера.
| Способ адаптивной обработки сигналов в модульной фазированной антенной решетке | 2016 |
|
RU2629921C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| Способ обработки сигналов в модульной адаптивной антенной решетке при приеме коррелированных сигналов и помех | 2015 |
|
RU2609792C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ | 2011 |
|
RU2455658C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2015 |
|
RU2593276C1 |
| US 9971027 B1, 15.05.2018 | |||
| CN 102288949 A, 21.12.2011 | |||
| US 6720910 B2, 13.04.2004 | |||
| CN 103439692 A, 11.12.2013 | |||
| US 6252540 B1, 26.06.2001 | |||
| CN 103728607 A, 16.04.2014. | |||

