Изобретение относится к области автоматизации контроля и управления технологическим процессом транспортировки продукта по магистральным трубопроводам средствами линейной телемеханики и может быть использовано при эксплуатации трубопроводного транспорта.
К основным нештатным ситуациям на многониточном магистральном трубопроводе (ММТ) относятся: разрыв трубопровода/утечка продукта, несанкционированная перестановка запорной арматуры и, как следствие, переток транспортируемого продукта между трубопроводами с разными динамическими режимами. Известно множество способов обнаружения разрывов/утечек, основанных на различных физических явлениях и законах.
Известен способ визуального контроля состояния линейной части трубопровода, основанный на изменении физико-технического состояния трубопровода и пространства вблизи места возникновения утечки, осуществляемый методом патрулирования с использованием носимых устройств обнаружения утечек (Ионин Д.А., Яковлев Е.И. Современные методы диагностики магистральных газопроводов. - Л.: Недра, 1987, с. 69-71).
Недостатками способа являются его трудоемкость, периодичность осуществляемого контроля, невозможность осуществления в отдаленных, труднодоступных местах и в сложных климатических условиях.
Известен способ контроля состояния магистрального трубопровода, основанный на изменении физико-технического состояния трубопровода (напряженность магнитного поля, механическая деформация) в месте возникновения утечки, осуществляемый методом пропускания внутри трубопровода различных регистрирующих приборов (Патент RU №2306479 С2, МПК F17D 5/02 (2006.01), 20.09.2007).
Недостатками способа являются сложность применяемой аппаратуры, необходимость в специальном оборудовании трубопровода, периодичность осуществляемого контроля, ограниченность контролируемых расстояний, недостаточная точность и надежность,.
Известен способ контроля состояния линейной части магистрального трубопровода, основанный на изменении температуры грунта вблизи места возникновения утечки, осуществляемый методом авиапатрулирования с использованием тепловизионной аппаратуры, установленной на борту вертолета или самолета (Алеев P.M., Овсянников В.А., Чепурский В.Н. Воздушная тепловизионная аппаратура для контроля нефтепродуктопроводов. - М.: Недра, 1995, с. 160).
Недостатками способа являются высокая стоимость, периодичность осуществления контроля, зависимость от погодных условий.
Известен способ обнаружения утечки, основанный на явлении возникновения акустических волн в месте утечки, генерируемых истечением газа, распространяющихся вдоль трубы в противоположных направлениях (Патент RU №2221230 С1, МПК G01M 3/24 (2000.01), F17D 5/02 (2000.01). 10.01.2004), осуществляемый методом измерения и анализа акустических сигналов двумя акустическими датчиками, расположенными вдоль трубопровода, преобразования акустических сигналов в электрические сигналы, усиления, фильтрации, определения взаимного спектра электрических сигналов и, по уровню энергии взаимного спектра, определения наличия признаков акустических сигналов течи, определения места течи по разности времен прибытия акустических сигналов к каждому из датчиков, находящихся по обе стороны от места течи.
Устройство, реализующее данный способ, содержит n измерительных каналов, каждый из которых состоит из последовательно соединенных: блока акустических преобразователей (датчика), блока усиления, соединенного с блоком фильтрации, блока аналого-цифрового преобразования, n канальных блоков передачи информации, блок анализа взаимных спектров сигналов и блок управления.
Недостатками способа являются высокий уровень ложных срабатываний, вызванных низкой помехоустойчивостью к шумам различного происхождения (технологического, сейсмоакустического), невысокая точность определения места утечки (при расчете не учитывается влияние на скорость распространения звука изменение динамических параметров потока), высокая эксплуатационная и приборная стоимость (при большой протяженности трубопровода существенно возрастает количество акустических датчиков и каналообразующей аппаратуры, устанавливаемых вдоль трассы, и объем кабельной продукции.
Известен способ обнаружения утечки в трубопроводе, основанный на использовании математической модели работы газотранспортной системы, реализованный в системе моделирования газопровода «PMS» с функцией обнаружения утечек производства компании LicEnergy («LICENERGY magasine» ISSUE NO.2 MARCH 1999), осуществляемый следующим образом: на основании конфигурации газотранспортной системы создается математическая модель этой системы, рассчитываются прогнозируемые значения давления и расхода газа в точках контроля согласно конфигурации с которыми с заданным периодом сравниваются реальные значения расхода и давления в этих точках, получаемые в реальном масштабе времени из базы данных системы диспетчерского управления и сбора данных (SCADA) и, в случае отличия измеренных значений от прогнозируемых с заданным критерием, делается вывод о наличии разрыва/утечки на контролируемом участке магистрального газопровода, при этом методом линейной аппроксимации приблизительно вычисляется местоположение нештатного события.
Основными недостатками способа являются низкая точность, и трудоемкость применения на многониточном магистральном трубопроводе, т.к. данная система моделирования - сложная, уникальная система, требующая длительной настройки, основным условием корректной работы системы моделирования является постоянство конфигурации газотранспортной системы и стационарность процесса транспорта газа, что практически не осуществимо в реальных условиях. В процессе эксплуатации изменение конфигурации газотранспортной системы происходит достаточно регулярно, любое изменение конфигурации потребует перенастройки системы.
Во всех перечисленных способах не предусмотрено обнаружение несанкционированной перестановки запорной арматуры, за исключением прямой сигнализации ее состояния.
Известен способ обнаружения утечки в трубопроводе, основанный на явлении возникновения волн разрежения давления (волн давления) в момент возникновения утечки продукта, распространяющихся по трубе в обе стороны от места утечки со скоростью, близкой к скорости звука в транспортируемом продукте, осуществляемый методом анализа волн давления, реализуемый системой обнаружения повреждений трубопроводов СОПТ «WaveControl» («WaveControl. Автоматическая система обнаружения повреждений трубопроводов», 2013, ООО «Эл Би Скай Глобал» http://grouplb.com/pdf/wavecontrol_opisanie.pdf).
Реализация способа осуществляется следующим образом: для фиксирования «волн давления проводят непрерывное измерение давления в контрольных точках трубопровода при помощи высокоскоростных датчиков давления, снимающих показания с частотой 1000 раз в секунду, данные с датчиков давления в виде унифицированных токовых сигналов поступают в локальный контроллер, локальный контроллер оцифровывает полученные данные, вычисляет корреляцию динамического давления и профиль давления, сравнивает корреляцию с порогом и, в случае превышения установленного значения порога корреляции, передает информацию о наличии волны давления на центральный контроллер. Центральный контроллер анализирует сообщения от локальных контроллеров и принимает решение о наличии утечки при выполнении следующих условий: волна давления зарегистрирована более чем одним из локальных контроллеров; источник сигнала о наличии волны давления расположен в контролируемом сегменте трубопровода; полученные тревожные сигналы идентифицированы как утечки при помощи соответствующих алгоритмов обработки данных.
Центральный контроллер выводит информацию о состоянии контролируемого участка на экран диспетчера в виде топологической схемы е указанием красным символом «мишени» места возникновения утечки и транспаранта с указанием места, времени и даты возникновения утечки.
Недостатками способа являются: - отсутствие определения факта несанкционированной перестановки запорной арматуры; высокая стоимость используемого оборудования (высокоскоростные датчики давления, расходомеры, локальные контроллеры в промышленном исполнении, центральный контроллер, автоматизированное рабочее место оператора, линии связи); высокая эксплуатационная стоимость.
Известны способы обнаружения утечки и ее локализации, реализуемые системой линейной телемеханики (СЛТМ) СТН-3000 с «встроенными» функциями системы обнаружения утечек (СОУ) (AT GS Система обнаружения утечек в составе СЛТМ СТН-3000. Техническая информация. http://docplayer.ru/27338883-At-gs-sistema-obnaruzheniya-utechek-sou-v-sostave-sltm-stn-3000-tehnicheskaya-informaciya.html). Система реализует несколько способов обнаружения утечек, основанных на разных физических явлениях. В качестве аналога рассмотрим способ, основанный на явлении возникновения волн разрежения давления (волна давления) в момент возникновения утечки продукта.
Реализация указанного способа осуществляется следующим образом: для обнаружения волны давления на каждом контролируемом пункте (КП) СЛТМ проводят периодическое измерение давления с интервалом не более 0,01 с прецизионными датчиками давления, фильтрацию полученных данных с помощью цифровых фильтров с целью отсечения случайных отклонений значений давления и последующую обработку данных штатным контроллером КП СЛТМ методом корреляционного анализа. В случае обнаружения волны давления контроллер КП формирует соответствующее сообщение в систему верхнего уровня.
Сервер пункта управления (ПУ) СЛТМ осуществляет сбор данных от КП, в том числе и информацию об обнаруженных волнах давления по штатной системе технологической связи СЛТМ, разделяет потоки информации и передает данные на сервер СОУ. На уровне сервера СОУ принимается окончательное решение о наличии утечки. Если факт утечки установлен, на уровне сервера СОУ вычисляется место возникновения утечки по разности времени регистрации волны давления на двух смежных КП и передается сообщение на АРМ СОУ и одновременно на ПУ СЛТМ, содержащее данные (дата, время, место возникновения утечки), необходимые для принятия решения о дальнейших мерах по локализации аварийного участка штатными средствами СЛТМ.
Для реализации данного способа осуществляется расширение «типовой» СЛТМ СТН-3000. Каждый контролируемый пункт СЛТМ оснащают прецизионными датчиками давления. В программное обеспечение контроллера КП добавляют функции предварительной обработки данных для задач системы обнаружения утечек. В ПУ СЛТМ как составную часть включают программно-технический комплекс СОУ, содержащий: сервер СОУ; автоматизированное рабочее место СОУ; специальное программное обеспечение СОУ.
Недостатками способа являются:
- отсутствие определения факта несанкционированной перестановки запорной арматуры;
- необходимость оснащения «типовой» СЛТМ дополнительными техническими средствами; что приводит к существенному удорожанию СЛТМ;
- наличие ограничений применения данного способа в виде необходимых условий: непрерывность течения транспортируемого продукта; стационарность режима транспортирования; погрешность датчиков давления не хуже ±0,15%.
Известен прецедентный способ обнаружения нештатной ситуации на многониточном магистральном газопроводе (ММГ), предложенный в работе (Бухвалов И.Р. Методы и алгоритмы информационной поддержки управления газотранспортной системой: дис. канд. тех. наук: 05.13.06. - 2007). Способ является наиболее близким к заявляемому способу и выбран в качестве прототипа.
Прецедент в данной работе - это состояние ограниченного участка ММГ с определенной конфигурацией запорной арматуры (комбинация состояний запорной арматуры) в виде последовательности изменений значений показаний датчиков давления в совокупности с прогнозируемой при этом нештатной ситуацией.
Реализация способа осуществляется следующим образом.
Заранее создают библиотеку прецедентов для участка ММГ, обслуживаемого СЛТМ. Для линейной части данного участка ММГ моделируют технологический процесс транспорта газа и все возможные на участке нештатные ситуации, связанные с разрывом газопровода/утечкой газа и запоминают изменения значений показаний датчиков давления с метками времени, соответствующие каждой смоделированной нештатной ситуации. Полученные данные классифицируют в зависимости от конфигурации запорной арматуры и заносят в библиотеку прецедентов. Нештатные ситуации моделируют последовательно на каждой из ниток газопровода с определенной дискретностью. В общем случае максимально возможное количество прецедентов (Pmax) для участка ММГ составляет

где 2N - количество возможных конфигураций запорной арматуры (два возможных состояния крана - открыт/закрыт, N - количество кранов на участке);
К - количество ниток газопровода на участке;
L - протяженность участка в км;
Δ - шаг дискретизации ММГ в км;
[L/Δ] - целое число от отношения с округлением в меньшую сторону.
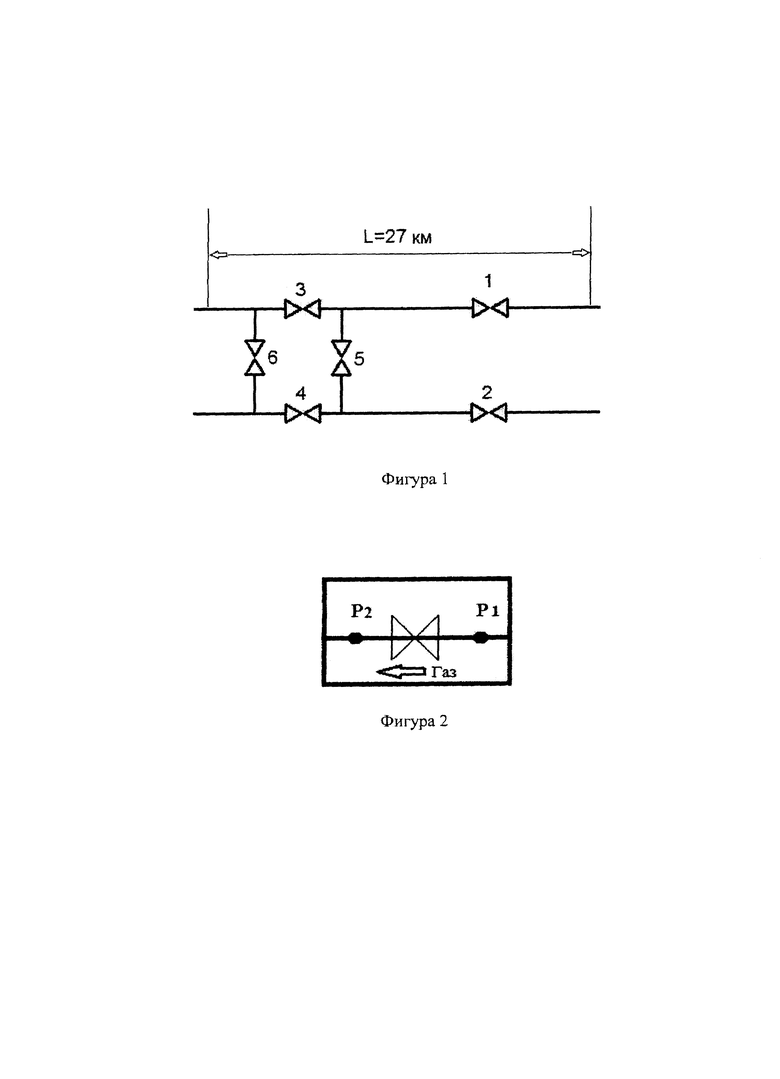
Рассмотрим создание библиотеки прецедентов на примере конкретного участка ММГ протяженностью 27 км, состоящего из двух ниток с расположенными на них шестью кранами, фигура 1.
В соответствии с формулой (1) максимальное количество прецедентов для данного участка при шаге дискретизации ММГ 5 км составило бы 640. Однако, с учетом технологического процесса транспорта газа, для рассматриваемого участка возможны только 26 комбинаций состояний кранов, при которых не нарушается технологический процесс (комбинации состояний, когда одновременно закрыты краны 1 и 2 или краны 3 и 4 -невозможны). Реально возможные комбинации состояний кранов для данного участка ММГ приведены в таблице 1.

Таким образом, для формирования библиотеки прецедентов с шагом дискретизации 5 км для двуниточного газопровода с шестью кранами данной конфигурации, протяженностью 27 км, потребуется описание 260 прецедентов

где Рреал - реальное количество прецедентов для данного участка ММГ;
2 - количество ниток газопровода на участке;
5 - количество смоделированных нештатных ситуаций на каждой из ниток для данного участка.
Автоматически на ПУ СЛТМ, путем сравнения текущих технологических параметров с данными, занесенными в библиотеку прецедентов, выбирают наиболее близкий (похожий) прецедент для данной конфигурации участка ММГ и делают вывод о возможном возникновении нештатной ситуации, при этом определяют место ее нахождения с точностью до шага дискретизации на конкретной нитке ММГ.
Недостатками способа являются:
- сложность создания библиотеки прецедентов для всех возможных конфигураций кранов и возможных при этом нештатных ситуаций;
- привлечение значительных вычислительных ресурсов из-за громоздкости библиотеки прецедентов;
- отсутствие распознавания типа нештатной ситуации.
В условиях возрастающих требований к надежности и безопасности эксплуатации трубопроводного транспорта, проблема своевременного обнаружения нештатной ситуации типа - разрыв трубопровода/утечка продукта с последующей локализацией поврежденного участка трубопровода становиться все более актуальной. Не менее актуально обнаружение несанкционированной перестановки запорной арматуры, поскольку несанкционированное закрытие/открытие запорной арматуры может привести не только к нарушению режима транспорта продукта, но и к разрыву трубопровода вследствие недопустимого превышения давления, а также к возникновению аварийной ситуации вследствие перетока транспортируемого продукта на участки трубопровода, где проводятся ремонтные или профилактические работы. В реальных условиях были зарегистрированы случаи несанкционированной перестановки запорной арматуры, в то время, как средства прямой сигнализации показывали ее штатное состояние. Распознавание типа нештатной ситуации также имеет большое значение, т.к. определяет оптимальный комплекс мер для ее ликвидации.
Техническим результатом предлагаемого способа является расширение функциональных возможностей, повышение быстродействия и точности обнаружения нештатной ситуации, повышение надежности и безопасности эксплуатации ММТ.
Технический результат достигается тем, что в способе обнаружения нештатной ситуации на многониточном магистральном трубопроводе (ММТ), заключающемся в сопоставлении технологических параметров транспортировки продукта по ММТ, получаемых от контролируемых пунктов системы линейной телемеханики, с технологическими параметрами, соответствующими нештатным ситуациям, заранее определенными для конкретного участка ММТ, участок ММТ представляют в виде множества элементов, состоящих из крана и двух датчиков давления, установленных до и после крана. Одновременно формируют совокупность всех признаков нештатных ситуаций для каждого элемента по возможным изменениям значений показаний датчиков давления и состояний крана. В масштабе реального времени с помощью программных средств на контролируемом пункте сопоставляют изменения текущих технологических параметров для каждого из элементов участка ММТ с ранее определенными признаками, соответствующими каждой из возможных нештатных ситуаций. По результатам сопоставления, сравнивая с информацией по смежным элементам, определяют возможное наличие нештатной ситуации. Информацию о наличии нештатной ситуации для элемента передают на пункт управления системы линейной телемеханики, после чего на пункте управления подтверждают наличие нештатной ситуации и определяют тип нештатной ситуации: разрыв трубопровода/утечка продукта или несанкционированная перестановка запорной арматуры, координату места возникновения нештатной ситуации по совокупности информации, полученной от контролируемых пунктов. Для исключения пропуска нештатной ситуации в пограничной области линейно-производственного участка ММТ, вводят обмен информацией между соседними контролируемыми пунктами, расположенными на смежных линейно-производственных участках.
Способ обнаружения нештатной ситуации на многониточном магистральном трубопроводе поясняют следующие фигуры:
- фигура 1 поясняет создание библиотеки прецедентов в прототипе. На ней показан участок ММГ протяженностью 27 км, рассматриваемый в качестве примера, состоящий из двух ниток МГ с шестью кранами определенной конфигурации (обозначены цифрами 1, 2, 3,4. 5, 6);
- фигура 2 поясняет понятие элемента участка ММТ, где Р1 и Р2 - датчики давления, установленные до и после крана по направлению течения продукта, соответственно;
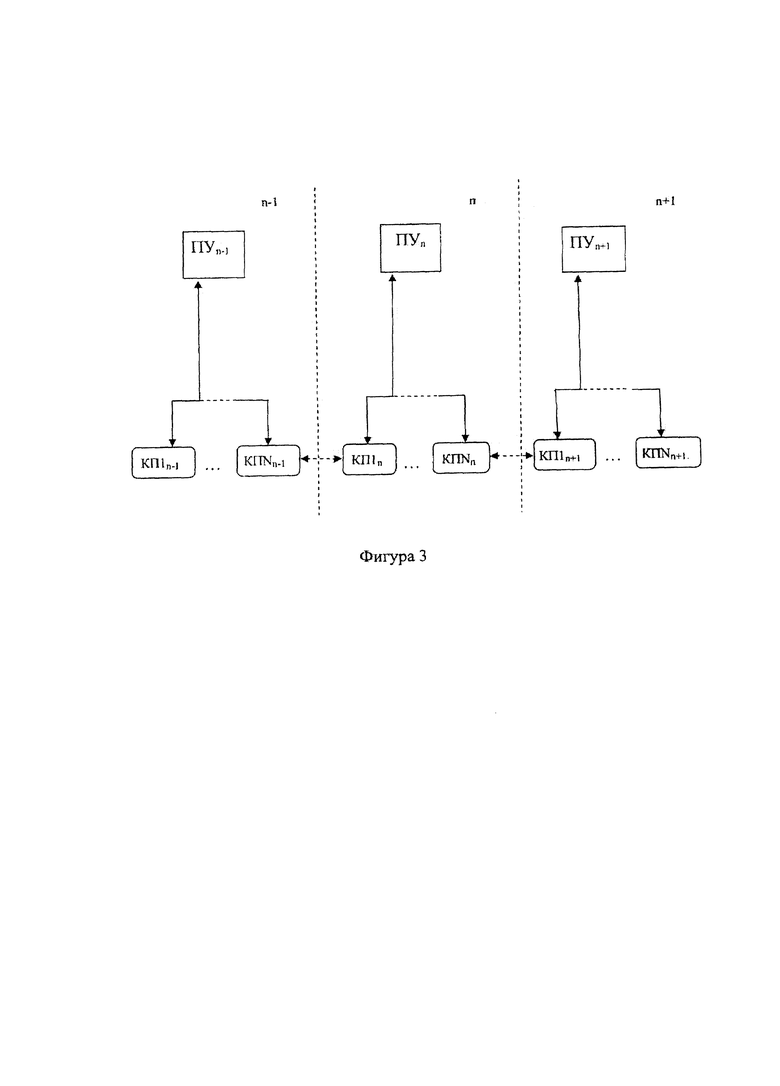
- фигура 3 поясняет дополнительный этап анализа состояния ММТ, заключающийся во введении ежесекундного информационного обмена между соседними контролируемыми пунктами, расположенными на смежных линейно-производственных участках. На рисунке условно показаны системы линейной телемеханики, расположенные на трех смежных линейно-производственных участках, обозначенных как «n-1», n и «n+1». Каждая система состоит из пункта управления и некоторого количества контролируемых пунктов, обозначенных ПУn-1 ПУn, ПУn+1 и КПNn-1 КПNn и КПNn+1, соответственно. В обозначении ПУ и КП индексы «n-1», n и «n+1» означают принадлежность к соответствующим линейно-производственным участкам, символ N - означает количество КП в системе, которое в разных системах может быть различным. Пунктиром условно показаны границы между смежными линейно-производственными участками;
- фигура 4 поясняет взаимосвязь между имитатором пункта управления, имитаторами контролируемых пунктов системы линейной телемеханики и имитатором данных технологического процесса транспортировки газа по магистральному газопроводу определенной конфигурации при проведении эксперимента по анализу адекватности предлагаемого способа в лабораторных условиях.
Предлагаемый способ обнаружения нештатной ситуации на многониточном магистральном трубопроводе осуществляется следующим образом.
Участок ММТ, представляют в виде множества элементов, состоящих из крана и двух датчиков давления, установленных до и после крана, (фигура 2) и одновременно формируют совокупность всех признаков нештатных ситуаций для каждого элемента по возможным изменениям значений показаний датчиков давления и состояний крана (прецедент), представленных в таблице 2.
Кран на элементе может находиться в двух состояниях - открыт (обозначим это состояние как О) и закрыт (обозначим это состояние как З). Обозначим показание датчика в начале работы - Pn, показание датчика в процессе работы - Pt, уставку по предельному изменению показания датчика - dP. Таким образом, в любой момент времени каждый датчик давления (Р1, Р2) может иметь 3 возможных состояния, обозначенных как:
- 0 при abs(Pt-Pn)<dP;
- -1 при (Pt-Pn)<-dP;
- 1 при (Pt-Pn)>dP).
Очевидно, что для элемента становятся возможны 18 комбинаций состояний датчиков давления и состояния крана (прецедентов).
Вводят следующую оценку возможности нештатной ситуации:
- высоковероятная ситуация ++;
- возможная ситуация +;
- невозможная ситуация -.
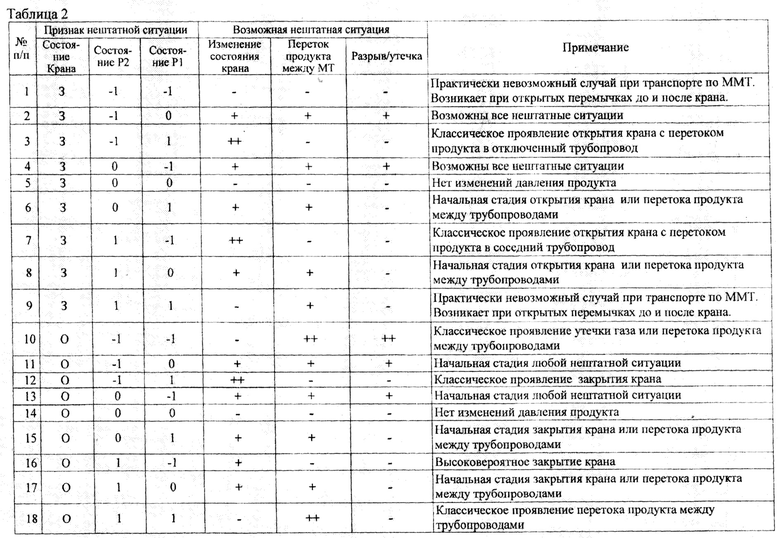
Таблица прецедентов (таблица 2) справедлива для всех элементов на контролируемом системой линейной телемеханики участке ММТ как для анализа на КП, так и для анализа на ПУ.
Типовая система линейной телемеханики, осуществляющая автоматический контроль технологических параметров, состояний технологического оборудования и дистанционное управление исполнительными механизмами линейной части ММТ, состоит из пункта управления (ПУ), включающего автоматизированное рабочее место диспетчера и располагаемого на диспетчерском пункте линейно-производственного участка, контролируемых пунктов (КП), распределенных по линейно-производственному участку и располагаемых в непосредственной близости к крановым площадками, и объединяющих ПУ и КП каналов связи.
Все операции на контролируемом пункте и пункте управление проводят с помощью программных средств в масштабе реального времени.
Сравнение текущих технологических параметров с ранее определенными в таблице 2 признаками прецедентов на уровне КП позволяет обнаружить нештатную ситуацию. Однако из таблицы 2 видно, что возможны только несколько случаев, с высокой вероятностью однозначно определяющих возникшую нештатную ситуацию.
Все вероятные состояния проверяются суперпозицией по группе соседних элементов и, в случае подтверждения обнаружения на КП, сообщение о нештатной ситуации передается на ПУ в приоритетном режиме с меткой времени и признаком возможной нештатной ситуации, что позволяет сократить временя обнаружения нештатной ситуации на ПУ.
Для обнаружения нештатной ситуации типа разрыв/утечка и определения ее места нахождения, на КП одновременно с анализом текущего состояния элемента проводят поиск волны давления. В случае выявления волны давления на КП, сообщение о нештатной ситуации с меткой времени передается на ПУ в приоритетном режиме.
Одновременно на ПУ проводится собственный анализ изменений текущего состояния элемента и поиск волны давления по алгоритму аналогичному алгоритму обработки данных на КП, в случае подтверждения, информация о выявленной нештатной ситуации отображается на ПУ с признаком выявления на ПУ. Окончательное решение о наличии нештатной ситуации типа разрыв/утечка принимается на уровне ПУ путем анализа информации по нескольким КП по алгоритмам, обеспечивающим идентификацию всех кранов, до которых может дойти первая обнаруженная волна давления, и вычисление ориентировочного времени прихода волны давления для каждого крана. При поступлении сообщения об обнаружении волны давления на других кранах производится сравнение разницы времен между первым сигналом и последующим, и в случае, если разница времени меньше ожидаемого времени его прихода, определяется место возможной утечки.
Параллельная обработка данных на КП и ПУ позволяет значительно снизить количество ложных срабатываний сигнализации о нештатной ситуации.
Повышение точности определения места нахождения нештатной ситуации типа разрыв/утечка, достигается тем, что в СЛТМ дополнительно вводят ежесекундный информационный обмен основными параметрами между пограничными КП, находящимися на смежных линейно-производственных участках, фигура 3 (например, между КПNn участка n и КП1n+1 участка n+1), позволяющий обнаруживать нештатные ситуации на пограничном участке ММТ между смежными ЛПУ, а также исключить ложные срабатывания, связанные с влиянием запорной арматуры соседних ЛПУ на развитие нештатной ситуации, что не позволяют сделать аналоги и прототип, т.к. при их применении данный участок ММТ остается вне зоны обнаружения нештатных ситуаций.
На КП и ПУ системы телемеханики, работающей в штатном режиме, автоматически осуществляется поиск нештатной ситуации прецедентным способом и способом по волне давления. Во всех случаях обнаружения нештатной ситуации на монитор диспетчера ПУ выводится аварийное сообщение, содержащее данные (дата, время, место возникновения и тип нештатной ситуации), необходимые для принятия решения о дальнейших мерах по локализации аварийного участка. Сообщение дублируется звуковой и световой сигнализацией.
Следует отметить, что используемый в способе алгоритм обработки данных, получаемых из базы данных реального времени системы линейной телемеханики, не нарушает штатный режим работы системы как на уровне КП, так и на уровне ПУ.
Предлагаемый способ по сравнению с прототипом и аналогами, позволяет обеспечить:
- распознавание типа нештатной ситуации: разрыв трубопровода/утечка продукта или несанкционированная перестановка запорной арматуры, и как следствие, переток транспортируемого продукта между трубопроводами с разными динамическими режимами с меньшими затратами вычислительных ресурсов;
- сокращение времени обнаружения нештатной ситуации за счет обработки данных на КП, приоритетной передачи сообщения о возможной нештатной ситуации и последующего подтверждения ее на ПУ;
- минимизацию ложных срабатываний сигнализации о нештатной ситуации за счет алгоритмизации и анализа на ПУ, исключения ситуации возникновения волны давления, связанной с несанкционированной перестановкой запорной арматуры, получения и анализа данных о состоянии ММТ на участках между соседними КП, расположенными на смежных линейно-производственных участках.
Анализ адекватности предлагаемого способа был проведен в лабораторных условиях на стенде, моделирующем участок ММГ определенной конфигурации и имитирующем работу системы линейной телемеханики на этом участке.
В основу моделирования был положен метод, изложенный в работе (Бухвалов И.Р. Методы и алгоритмы информационной поддержки управления газотранспортной системой: дис. канд. тех. наук: 05.13.06. - 2007), позволяющий моделировать линейную часть магистрального газопровода любой конфигурации и сложности.
Примененный метод моделирования обеспечивает:
- моделирование работы ММГ в реальном масштабе времени с точностью до 1 с;
- формирование данных по давлению и температуре транспортируемого продукта с точностью до 1% но всем датчикам давления ММГ;
- моделирование состояния всех кранов ММГ и угла поворота крана с точностью до 1 градуса;
- отработку всех типов нештатных ситуаций, возможных на ММГ;
- передачу моделируемых данных по каналам связи на имитаторы КП.
Структурная схема стенда (фигура 4) поясняет взаимодействие составных частей СЛТМ при проведении эксперимента.
На схеме показаны имитатор ПУ, имитаторы четырех КП, аппаратура каналов связи между ПУ и КП, имитатор данных с датчиков аналоговых и цифровых параметров (далее - имитатор данных).
На ПЭВМ имитатора ПУ установлено программное обеспечение ПУ рассматриваемого участка с интегрированными программными модулями обнаружения нештатной ситуации. В контроллеры имитаторов КП установлены программы реальных КП с интегрированными программными модулями обнаружения нештатной ситуации прецедентным способом и по волне давления. На ПЭВМ имитатора данных установлено программное обеспечение выполняющее:
- моделирование процесса транспорта газа в реальном масштабе времени на участке ММГ определенной конфигурации;
- формирование нештатных ситуаций на ММГ в режиме реального масштаба времени, путем изменений состояний кранов и формирования утечки продукта из ММГ;
- передачу моделируемых данных на имитаторы КП по четырем каналам связи;
- отображение на видеокадрах ПЭВМ имитатора данных состояния моделируемого участка ММГ.
Программное обеспечение имитатора данных моделирует и передает на уровень имитаторов КП поток данных, описывающих состояние процесса транспорта газа (давление, температура) и состояние технологических объектов (кранов, перемычек) данного участка. Имитатор данных позволяет в любом месте виртуального газопровода имитировать полный или частичный разрыв/утечку любого размера и продолжительности, несанкционированную перестановку крана, в том числе и без изменения состояний концевых переключателей, переток газа между газопроводами с разными газодинамическими режимами. Передаваемые на имитаторы КП данные обрабатываются параллельно по алгоритмам работы системы телемеханики и алгоритмам обнаружения нештатных ситуаций. Было проведено более 500 экспериментов с моделированием различных типов нештатных ситуаций, в том числе и аварийных ситуаций, зарегистрированных ранее системой линейной телемеханики на рассматриваемом участке ММГ.
Были получены следующие результаты:
- обнаружение несанкционированной перестановки крана при изменении давления на 0,35 кг/см2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЕДИНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРУБОПРОВОДНОЙ СИСТЕМОЙ "ВОСТОЧНАЯ СИБИРЬ - ТИХИЙ ОКЕАН - II" (ЕСУ ТС "ВСТО-II") | 2013 |
|
RU2551787C2 |
| СИСТЕМА "СМАРТ-МОНИТОРИНГ" ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ЗАПОРНОЙ АРМАТУРЫ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2021 |
|
RU2752449C1 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРУБОПРОВОДА | 2015 |
|
RU2606719C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПРЕДВЕСТНИКОВ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ НА ЛИНЕЙНОЙ ЧАСТИ ПОДЗЕМНОГО МАГИСТРАЛЬНОГО ПРОДУКТОПРОВОДА | 2013 |
|
RU2523043C1 |
| СПОСОБ ОПЕРАТИВНОГО ОБНАРУЖЕНИЯ ПОВРЕЖДЕННОГО СЕТЕВОГО ТРУБОПРОВОДА В МНОГОМАГИСТРАЛЬНЫХ ТЕПЛОВЫХ СЕТЯХ | 2014 |
|
RU2576733C2 |
| Система диспетчерской централизации железной дороги | 2019 |
|
RU2728199C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО АДРЕСНОГО ОТКЛЮЧЕНИЯ ПОДАЧИ ВОДЫ В АВАРИЙНЫЕ УЧАСТКИ ВНУТРЕННЕГО ПРОТИВОПОЖАРНОГО ВОДОПРОВОДА ПРИ НАРУШЕНИИ ГЕРМЕТИЧНОСТИ ЕГО ГИДРАВЛИЧЕСКОЙ СЕТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2605771C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ РАЗРЕШЕННОГО РАБОЧЕГО ДАВЛЕНИЯ В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ | 2020 |
|
RU2755406C1 |
| ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА ПРОТИВОАВАРИЙНОЙ АВТОМАТИКИ МАГИСТРАЛЬНЫХ НЕФТЕПРОВОДОВ И НЕФТЕПРОДУКТОПРОВОДОВ | 2015 |
|
RU2588330C1 |
| КОМБИНИРОВАННАЯ ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ УТЕЧЕК НЕФТЕПРОДУКТОПРОВОДА | 2010 |
|
RU2462656C2 |

Изобретение относится к области автоматизации контроля и управления технологическим процессом транспортировки продукта по многониточным магистральным трубопроводам (ММТ). Технический результат - расширение функциональных возможностей, повышение быстродействия и точности обнаружения нештатной ситуации, повышение надежности и безопасности эксплуатации ММТ. В способе участок ММТ представляют в виде множества элементов, состоящих из крана и двух датчиков давления, установленных до и после крана. Одновременно формируют совокупность всех признаков нештатных ситуаций для каждого элемента по возможным изменениям значений показаний датчиков давления и состояний крана. В масштабе реального времени с помощью программных средств на контролируемом пункте (КП) сопоставляют изменения текущих технологических параметров для каждого из элементов участка ММТ с ранее определенными признаками, соответствующими каждой из возможных нештатных ситуаций. По результатам сопоставления, сравнивая с информацией по смежным элементам, определяют возможное наличие нештатной ситуации. Информацию о наличии нештатной ситуации для элемента передают на пункт управления (ПУ) системы линейной телемеханики, после чего на ПУ подтверждают наличие нештатной ситуации и определяют тип нештатной ситуации: разрыв трубопровода/утечка продукта или несанкционированная перестановка запорной арматуры, координату места возникновения нештатной ситуации по совокупности информации, полученной от КП. Для исключения пропуска нештатной ситуации в пограничной области линейно-производственного участка ММТ вводят обмен информацией между соседними КП, расположенными на смежных линейно-производственных участках. 4 ил., 2 табл.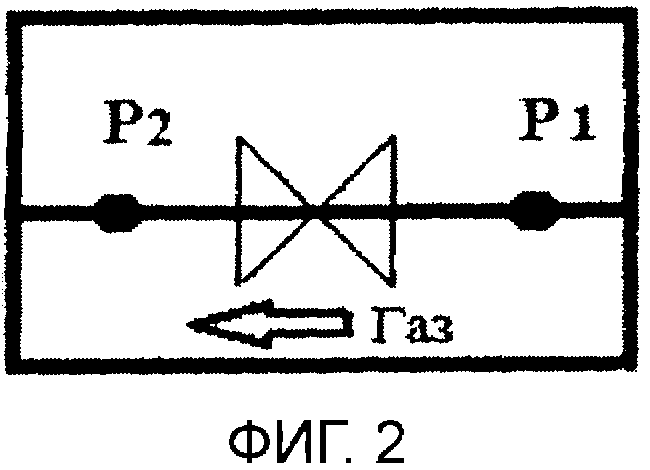
Способ обнаружения нештатной ситуации на многониточном магистральном трубопроводе (ММТ), заключающийся в сопоставлении технологических параметров процесса транспортировки продукта по ММТ, получаемых от контролируемых пунктов системы линейной телемеханики, с технологическими параметрами, соответствующими нештатным ситуациям, заранее определенными для конкретного участка ММТ, отличающийся тем, что участок ММТ представляют в виде множества элементов, состоящих из крана и двух датчиков давления, установленных до и после крана, одновременно формируют совокупность всех признаков нештатных ситуаций для каждого элемента по возможным изменениям значений показаний датчиков давления и состояний крана, далее в масштабе реального времени с помощью программных средств на контролируемом пункте сопоставляют изменения текущих технологических параметров для каждого из элементов участка ММТ с ранее определенными признаками, соответствующими каждой из возможных нештатных ситуаций, по результатам сопоставления, сравнивая с информацией по смежным элементам, определяют возможное наличие нештатной ситуации, информацию о наличии нештатной ситуации для элемента передают на пункт управления системы линейной телемеханики, после чего на пункте управления подтверждают наличие нештатной ситуации и определяют тип нештатной ситуации: разрыв трубопровода/утечка продукта или несанкционированная перестановка запорной арматуры, координату места возникновения нештатной ситуации по совокупности информации, полученной от контролируемых пунктов, кроме того, для исключения пропуска нештатной ситуации в пограничной области линейно-производственного участка ММТ вводят обмен информацией между соседними контролируемыми пунктами, расположенными на смежных линейно-производственных участках.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ В РЕАЛЬНОМ ВРЕМЕНИ ЭФФЕКТИВНОСТИ РАБОТЫ ТРУБОПРОВОДА ДЛЯ ТРАНСПОРТИРОВКИ ТЕКУЧЕЙ СРЕДЫ | 2009 |
|
RU2525369C2 |
| US 5388445 A, 14.02.1995 | |||
| US 4796466 A1, 10.01.1989 | |||
| Способ автоматизированного выявления поврежденного участка в трубопроводных системах | 1989 |
|
SU1710929A1 |
| Способ дистанционного определения места повреждения в напорной трубопроводной сети | 1979 |
|
SU766210A1 |

