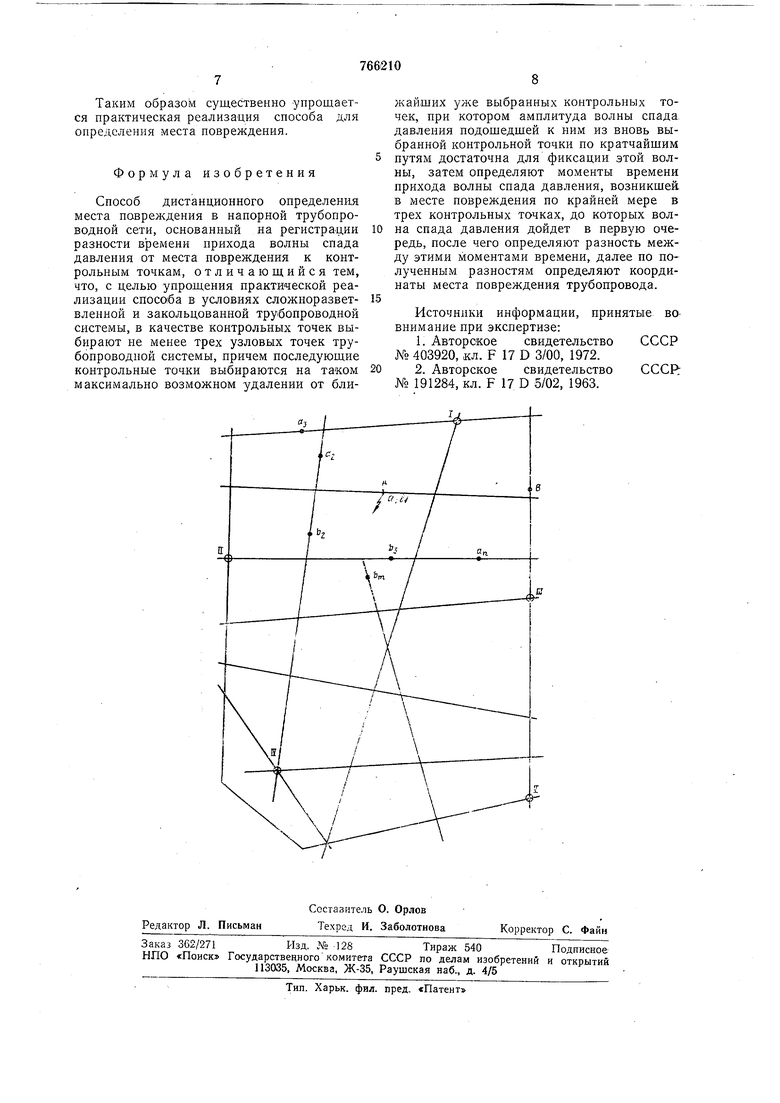
давления, от возникающих при повреждении трубопроводов, где место повреждения определяют по разности моментов прихода фронтов волн спада давления к концам контролируемого участка трубопровода, выбирают не менее трех узловых точек трубопроводной системы, затем определяют моменты прихода фронтов волн спада давления в месте повреждения по крайней мере в трех упомянутых контрольных точках, до которых фронты волн спада давления дойдут в первую очередь, далее по разностям между этими моментами определяют предполагаемые и действительные координаты места повреждения, причем действительные координаты определяют однозначно но совпавшим по крайней мере двум предполагаемым координатам. На чертеже приведена схема „определения места повреждения по предлагаемому способу. Предположим, что необходимо обеспечить контроль участка сложной трубопроводной системы, приведенной на чертеже. Для этого выбираем первую контрольную точку в любой узловой точке трубопроводной системы, например в точке I. Вторую контрольную точку выбираем на таком максимально возможном расстоянии от первой узловой точки, при котором волна спада давления, возник1шая в первой точ:ке при подходе к контрольной точке II по кратчайшему пути, имеет амплитуду достаточную для фиксации. Кратчайший ггуть следования волны спада давления по перекачиваемому продукту определяем, например, по методу Форда. Таким образом вторую контрольную точку выбираем, например, в точке II. Третью контрольную точку выбираем на таком максимально возможном удалении от контрольной точки I и контрольной точки И, при котором волна спада давления, возникшая в третьей контрольной точке при подходе к контрольным точкам I и II имеет амплитуду достаточную для фиксации. Получаем третью контрольную точку в узловой точке П1. Четвертую контрольную точку выбираем на таком максимально возможном удалении от ближайших уже выбранных контрольных точек II и III, при котором амплитуда волны спада давления, возникшая в четвертой точке, при подходе к контрольным точкам II и III, по кратчайшим путям, определенным, например, по методу Форда, нмеет величину достаточную для регистрации. Выбираем четвертую контрольную точку в узловой точке IV. Пятую контрольную точку выбираем в узловой точке на таком максимальном удалении от контрольных точек III и IV, при котором волна спада давления, возникшая в пятой точке, при подходе по .кратчайшим путям к конт трольным тачкам III и IV имеет амплитуду достаточную для ее регистрации в этих контрольных точках. Пятую контрольную точку выбираем в узловой V. Процесс выбора контрольных точек продолжается до тех пор, пока вся трубопроводная система не будет обеспечена узловыми контрольными точками, количество которых достаточно для контроля всей трубопроводной системы. Причем контрольные точки выбираются, как правило, только в узловых точках трубопроводной системы. Предположим, что в точке А произошло повреждение трубопровода. При возникновении повреждения по сети трубопровода от места повреждения начинает распространяться с известной скоростью волна спада давления. Определяем моменты времени прихода волны спада давления по крайней мере к трем ближайшим от места повреждения контрольным точкам I, II и III, до которых эта волна дойдет в первую очередь. Получаем значения этих моментов времени i, 4 и /з- После чего определяем разность между полученными моментами времени и получаем их значения: , А 1 /2-ti; где Д/1 и - разность моментов времени прихода волны спада давления в соответствующие контрольные точки; /1, 2 и - моменты времени прихода волны спада давления к контрольным точкам I, II, III. Далее по полученным разностям определяем предполагаемые места повреждения, количество которых будет зависеть от конфигурации и сложности трубопроводной системы между контрольными точками. Расстояние от середины i-того пути между контрольными точками I и П до места повреждения находим по зависимости:Х,- /2МЛ, где Xi - расстояние от середины i-Toro пути между узловыми контрольными точками I и II до места повреждения трубопроводной системы, где i 1,2,3 ... п, в зависимости от конкретного расположения места повреждения; V - скорость распространения волны спада давления в данной трубопроводной системе, которая заранее известна и периодически ее значение корректируется; А/1 - разность .моментов времени прихода волны спада давления к контрольным точкам I и II, расположенным на концах t-того пути.
После чего определяем предполагаемые координаты места повреждения:
«, Агде йп - предполагаемая координата места повре1ждения;
Si - расстояния между узловыми точ ками I и II по /-тому пути;
Xi - расстояние от середины t-того пути между узловыми точками I и II до места повреждения трубопроводной системы. Так как мы еще не знаем на каком из г-тых путей, соединяющих по трубопроводной сети узловые контрольные точки I и II, находится место повреждения, то соответственно получим а значений предполагаемой координаты места повреждения а, а, из й-п, количество которых будет зависеть от сложности и конфигурации трубопроводной системы между этими узловыми контрольными точками.
Аналогично найдем расстояние от середины /-того пути между узловыми контрольными точками II и III до места повреждения:
г/ ,
где z/j - расстояние от середины /-того пути между узловыми контрольными точками II и III до места повреждения трубопроводной системы, где / 1,2,3... т, в зависимости от конкретного расположения места повреждения; V - скорость распространения волны спада давления в данной трубопроводной системе, которая заранее известна и ее значение периодически корректируется; Atz - разность моментов времени прихода волны спада давления к контрольным точкам II и III, располол енным на концах /-того пути;
Отсюда находим т значений координаты предполагаемого места повреждения.
j
В,п
-yj
где Вт - предполагаемая координата места повреждения;
Sj - расстояние между узловыми точками II и иг по /-тому пути; Уу - расстояние от середины /-того пути между узловыми контрольными точками II и III до места повреждения трубопроводной системы.
Так как мы еще не знаем на каком из /-ТЫХ путей, соединяющих узловые контрольные точки трубопроводной системы II и III, находится место повреждения, соответственно получим т значений предполагаемой координаты места повреждения - В,, BZ, BZ ... Вт, количество которых будет зависеть от конфигурации и сложности трубопроводной системы между узловыми контрольными точками II и III. Таким образом мы имеем ряд значений предполагаемых координат места повреждения.
Координату действительного места повреждения определяем однозначно по совпадению, по крайней мере двух предполагаемых координат.
Совпадение (с допустимой погрешностью) пары точек а„ и Вт даст нам действительное место повреждения трубопроводной системы. Значение а в данном случае совпадает со значением Bi, что и однозначно определяет точку Л, как место повреждения трубопроводной системы.
При возникновении повреждения трубопровода, например, в точке В нам дополнительно для определения места повреждения необходимо провести выщеперечисленные операции с учетом и разности времени прихода волны спада давления от места повреждения в узловые контрольные точки I и III.
При выборе контрольных точек в трубопроводной системе необходимо задаться начальным значением утечки, получивщейся в результате повреждения, например
утечкой в 10% от общего расхода. Причем все контрольные точки выбираются, как правило, в узловых точках трубопроводной системы.
Данный способ легко реализуется с применением ЭВМ, когда после получения информации о моментах времени прилода волны спада давления ЭВМ рещает задачу по определенному алгоритму, например, методом сплошного перебора, причем эти
операции берут крайне незначительное количество машинного времени ЭВМ и она все остальное время сможет решать другие задачи, связанные с АСУ этой трубопроводной системы.
Применение данного способа позволяет автоматизировать поиск повреждений в сложпоразветвленных и закольцованных трубопроводных системах, что влечет за
собой реализацию дистанционной локализации повреждений, быструю ликвидацию аварий, значительное сокращение потерь перекачиваемых продуктов и сокращение простоя поврежденных участков, что позволпт значительно уменьшить перерыв в снабжении продуктами перекачки близлежащ 1х потребителей. Данный способ может успешно применяться, например, на сетях водоснабжения, что принесет ошутпмый экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного выявления поврежденного участка в трубопроводных системах | 1989 |
|
SU1710929A1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И ОСАДКИ ПОДВОДНОЙ ЧАСТИ АЙСБЕРГА | 2016 |
|
RU2623830C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТ УСТАНОВКИ НАСОСНЫХ СТАНЦИЙ НА ТРАССЕ СБОРНО-РАЗБОРНОГО НЕФТЕПРОДУКТОПРОВОДА | 2017 |
|
RU2664871C1 |
| СПОСОБ ВВОДА И ВЫВОДА ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ТОЧЕЧНОГО РАСТРА | 2004 |
|
RU2363046C2 |
| СПОСОБ РАДИОАКУСТИЧЕСКОГО НАКЛОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 1999 |
|
RU2152055C1 |
| Способ калибровки изображений стереофотограмметрической системы | 1988 |
|
SU1703972A1 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ ДО ТОЧКИ ВЫСТРЕЛА | 2008 |
|
RU2494336C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЗАБОЯ СКВАЖИНЫ | 1996 |
|
RU2112878C1 |
| Устройство для автоматического определения мест повреждения трубопроводов | 1979 |
|
SU941776A1 |
