ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к контролю шин транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Транспортные средства могут содержать системы, которые контролируют условия шин транспортного средства, в том числе, запасных шин транспортного средства.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном из аспектов настоящего изобретения предложено транспортное средство, содержащее:
множество шин;
запасную шину; и
контроллер, запрограммированный с возможностью вывода сигнала указывающего, что запасная шина заменила одну из множества шин, в ответ на разность между радиусом первой шины и радиусом второй шины, превышающую пороговое значение.
В одном из вариантов настоящего изобретения предложено транспортное средство, в котором разность между радиусом первой шины и радиусом второй шины основана на отношении между радиусом первой шины и радиусом второй шины.
В одном из вариантов настоящего изобретения предложено транспортное средство, в котором отношение между радиусом первой шины и радиусом второй шины основано на угловой скорости первой шины и угловой скорости второй шины.
В одном из вариантов настоящего изобретения предложено транспортное средство, в котором радиус первой шины и радиус второй шины основаны на скорости рыскания транспортного средства.
В одном из вариантов настоящего изобретения предложено транспортное средство, в котором радиус первой шины также основан на угловой скорости первой шины, угловой скорости второй шины, отношении между радиусом первой шины и радиусом второй шины, и ширине колеи транспортного средства.
В одном из вариантов настоящего изобретения предложено транспортное средство, где радиус второй шины также основан на угловой скорости первой шины, угловой скорости второй шины, ширине колеи и радиусе первой шины.
В одном из вариантов настоящего изобретения предложено транспортное средство, в котором радиус первой шины основан на угловой скорости первой шины и скорости транспортного средства, а радиус второй шины основан на угловой скорости второй шины и скорости.
В одном из вариантов настоящего изобретения предложено транспортное средство, в котором скорость выводится из модуля GPS (GPS - Global Positioning System –система глобального позиционирования).
В одном из вариантов настоящего изобретения предложено транспортное средство, в котором радиус первой шины также основан на оценке пробуксовки первой шины, и радиус второй шины также основан на оценке пробуксовки второй шины.
В одном из вариантов настоящего изобретения предложено транспортное средство, дополнительно содержащее измерительное средство, выполненное с возможностью отображения оставшегося срока службы запасной шины, при этом контроллер дополнительно запрограммирован с возможностью вывода сигнала указывающего оставшийся срок службы запасной шины, основанный на заданной максимальной долговечности запасной шины, в ответ на сигнал, указывающий, что запасная шина заменила одну из множества шин.
В другом аспекте настоящего изобретения предложена система контроля запасной шины, содержащая:
контроллер, запрограммированный с возможностью вывода сигнала указывающего, что запасная шина используется в настоящее время, в ответ на разность между параметром, указывающим геометрию первой шины, и параметром, указывающим геометрию второй шины, превышающую пороговое значение.
В одном из вариантов настоящего изобретения предложена система контроля запасной шины, в которой разность основана на отношении между радиусом первой шины и радиусом второй шины.
В одном из вариантов настоящего изобретения предложена система контроля запасной шины, в которой отношение основано на угловой скорости первой шины и угловой скорости второй шины.
В одном из вариантов настоящего изобретения предложена система контроля запасной шины, в которой радиус первой шины и радиус второй шины основаны на скорости рыскания транспортного средства.
В одном из вариантов настоящего изобретения предложена система контроля запасной шины, в которой радиус первой шины основан на угловой скорости первой шины, угловой скорости второй шины, отношении между радиусом первой шины и радиусом второй шины, и ширине колеи транспортного средства.
В одном из вариантов настоящего изобретения предложена система контроля запасной шины, где радиус второй шины также основан на угловой скорости первой шины, угловой скорости второй шины, ширине колеи транспортного средства и радиусе первой шины.
В одном из вариантов настоящего изобретения предложена система контроля запасной шины, в которой радиус первой шины основан на угловой скорости первой шины и скорости транспортного средства, выведенной из модуля GPS, а радиус второй шины основан на угловой скорости второй шины и скорости транспортного средства.
В одном из вариантов настоящего изобретения предложена система контроля запасной шины, радиус первой шины также основан на оценке пробуксовки первой шины, и радиус второй шины также основан на оценке пробуксовки второй шины.
В одном из вариантов настоящего изобретения предложена система контроля запасной шины, дополнительно содержащая измерительное средство, выполненное с возможностью отображения оставшегося срока службы запасной шины, при этом контроллер дополнительно запрограммирован с возможностью вывода сигнала в ответ на сигнал, указывающий, что запасная шина используется в настоящее время, указывающего оставшийся срок службы запасной шины, основанный на заданной максимальной долговечности запасной шины.
В дополнительном аспекте настоящего изобретения предложен способ контроля использования запасной шины, включающий в себя этапы, на которых:
в ответ на разность между радиусом первой шины и радиусом второй шины, превышающую пороговое значение, выдают предупреждение, что запасная шина используется в настоящее время, и отображают оставшийся срок использования запасной шины.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
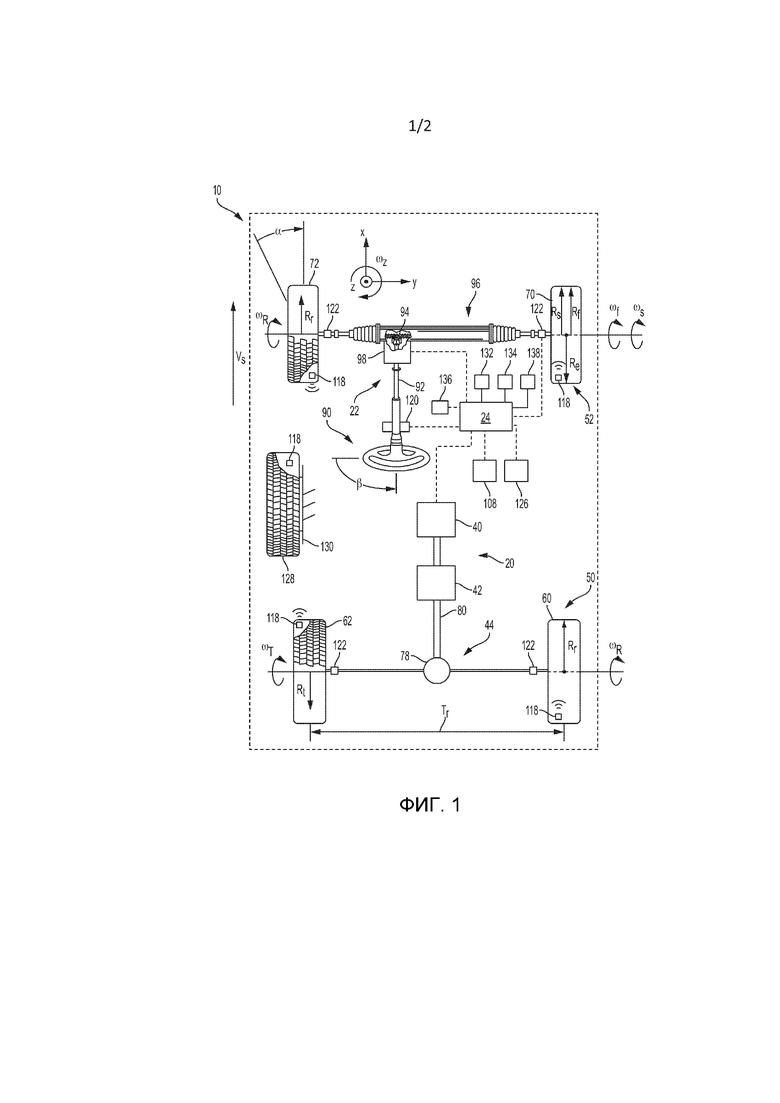
Фиг.1 иллюстрирует транспортное средство, содержащее силовую передачу и систему рулевого управления; и
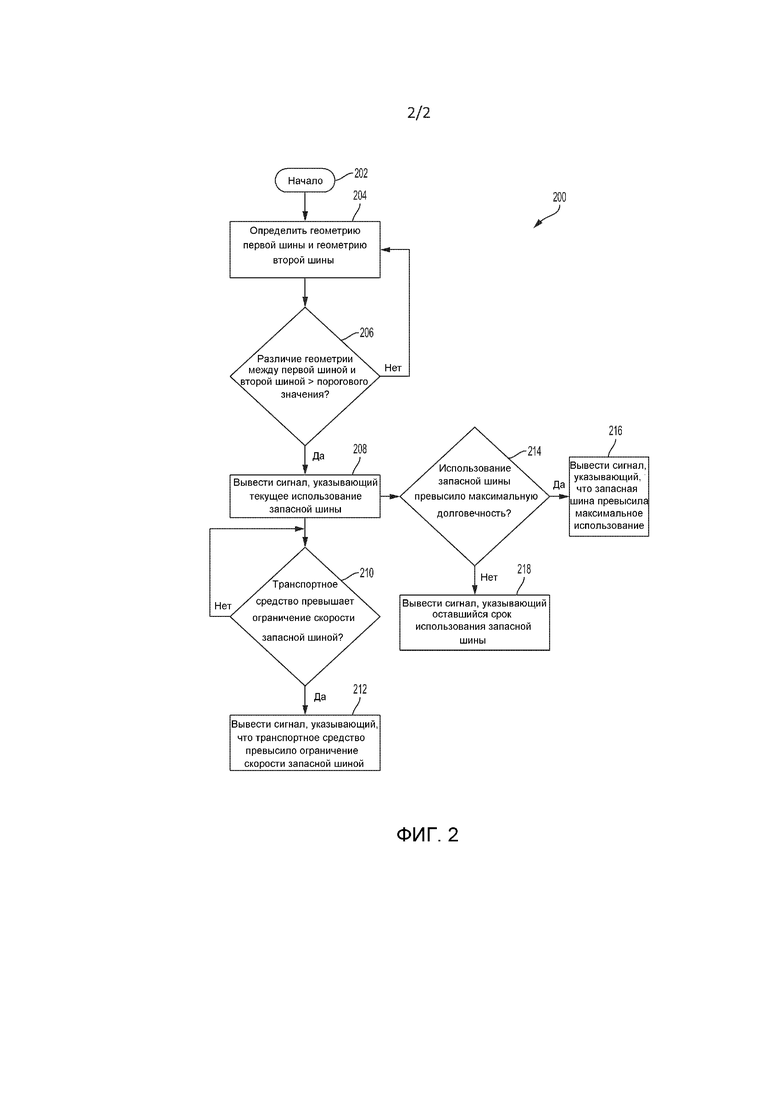
фиг.2 иллюстрирует способ контроля использования запасной шины.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения описаны в материалах настоящего описания. Следует понимать, однако, что описанные варианты осуществления являются всего лишь примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Фигуры не обязательно должны определять масштаб; некоторые элементы могли быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, описанные в материалах настоящего описания, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения. Как будут понимать специалисты в данной области техники, различные элементы, проиллюстрированные и описанные со ссылкой на любую одну из фигур, могут комбинироваться с элементами, проиллюстрированными на одной или более других фигур, для создания вариантов осуществления, которые не проиллюстрированы и не описаны явно. Проиллюстрированные комбинации элементов дают характерные варианты осуществления для типичных применений. Различные комбинации и модификации элементов, совместимых с аспектами настоящего изобретения, однако, могли бы требоваться для конкретных применений или реализаций.
Ссылаясь на фиг.1, проиллюстрировано транспортное средство 10. Транспортное средство 10 может быть моторным транспортным средством, таким как автомобиль, грузовой автомобиль, сельскохозяйственное оборудование или военное транспортное средство. Транспортное средство 10 может содержать силовую передачу 20, систему 22 рулевого управления и контроллер 24.
Несмотря на то, что проиллюстрирован в качестве одного контроллера, контроллер 24 может быть частью большей системы управления и может управляться различными другими контроллерами по всему транспортному средству 10, такими как контроллер системы транспортного средства (VSC – vehicle system controller). Поэтому, следует понимать, что контроллер 24 и один или более других контроллеров могут совместно указываться ссылкой как «контроллер», который управляет различными функциями транспортного средства 10 и/или исполнительными механизмами в ответ на сигналы с различных датчиков. Контроллер 24 может содержать микропроцессор или центральное процессорное устройство (ЦПУ, CPU – central processing unit) в соединении с различными типами машиночитаемых запоминающих устройств или носителей. Машиночитаемые запоминающие устройства или носители могут содержать энергозависимое и энергонезависимое запоминающее устройство, например, в постоянном запоминающем устройстве (ПЗУ, ROM – read-only memory), оперативном запоминающем устройстве (ОЗУ, RAM – random-access memory) и оперативной памяти (KAM – keep-alive memory). ОП (KAM) является постоянной или энергонезависимой памятью, которая может использоваться для хранения различных рабочих переменных, в то время как выключено питание ЦПУ. Машиночитаемые запоминающие устройства или носители могут быть выполнены с использованием любого из некоторого количества известных устройств памяти, таких как ППЗУ (программируемые постоянные запоминающие устройства PROM - Programmable Read-Only Memory), ЭППЗУ (электрически программируемые ПЗУ, EPROM - Electronically Programmable Read Only Memory), ЭСППЗУ (электрически стираемые ППЗУ, EEPROM - Electrically Erasable Programmable Read Only Memory), флэш-память или любые другие электрические, магнитные, оптические или комбинированные устройства памяти, способные к хранению данных, некоторые из которых представляют собой исполняемые команды, используемые контроллером при управлении транспортным средством.
Силовая передача 20 может обеспечивать крутящий момент на одно или более колесных узлов, чтобы приводить в движение транспортное средство 10. Силовая передача 20 может иметь гибридную конфигурацию, которая может применять многочисленные источники мощности, или негибридную конфигурацию. В негибридной конфигурации, силовая передача 20 может содержать двигатель 40, трансмиссию 42 и по меньшей мере один узел 44 ведущего моста.
Двигатель 40 может быть выполнен в виде двигателя внутреннего сгорания, который может быть выполнен с возможностью работы с использованием любого подходящего типа топлива, такого как бензин, дизельное топливо, этиловый спирт, водород, и т.д. Двигатель 40 может обеспечивать мощность или движущий крутящий момент, который может использоваться для вращения одного или более колесных узлов для приведения в движение транспортного средства 10. Например, транспортное средство 10 может содержать первый колесный узел 50 и второй колесный узел 52, расположенный на расстоянии продольно от первого колесного узла 50. Обычно первый колесный узел 50 может указываться ссылкой как задний мост, а второй колесный узел 52 может указываться ссылкой как передний мост.
Первый колесный узел 50 может содержать первую шину 60, установленную на первом колесе. Первый колесный узел 50 может содержать вторую шину 62, установленную на втором колесе, расположенном на расстоянии латерально от первой шины 60, установленной на первом колесе. Комбинация первой шины 60 и первого колеса может быть установлена с возможностью вращения на шасси транспортного средства посредством узла колесной ступицы. Комбинация второй шины 62 и второго колеса также может быть установлена с возможностью вращения на шасси транспортного средства посредством узла колесной ступицы.
Второй колесный узел 52 может содержать первую шину 70, установленную на первом колесе. Второй колесный узел 52 может содержать вторую шину 72, установленную на втором колесе, расположенном на расстоянии латерально от первой шины 70. Комбинация первой шины 70 и первого колеса может быть установлена с возможностью вращения на шасси транспортного средства посредством узла колесной ступицы. Комбинация второй шины 72 и второго колеса также может быть установлена с возможностью вращения на шасси транспортного средства посредством узла колесной ступицы.
Трансмиссия 42 может быть связана с или присоединена с возможностью приведения в движение к двигателю 40. Трансмиссия 42 может быть любого подходящего типа, такой как автоматическая или ручная трансмиссия с многочисленными передачами или ступенчатым передаточным отношением. В качестве используемого в материалах настоящего описания, термин трансмиссия может включать в себя раздаточную коробку или дифференциал 78. Дифференциал 78 может обеспечивать многоколесный привод, полный привод, привод на передние колеса или привод на задние колеса.
Узел 44 ведущего моста может с возможностью вращения поддерживать первый колесный узел 50. Выход трансмиссии 42 может быть присоединен к входу дифференциала 78, функционально присоединенного к узлу 44 ведущего моста приводным валом 80. В по меньшей мере одном варианте осуществления, транспортное средство 10 может быть снабжено узлом переднего ведущего моста, который может с возможностью вращения поддерживать второй колесный узел 52.
Система 22 рулевого управления может быть выполнена с возможностью сочленения или поворота второго колесного узла 52. Система 22 рулевого управления может содержать рулевое колесо 90 в соединении с возможностью вращения со вторым колесным узлом 52 через рулевой привод 92. Рулевой привод 92 может быть выполнен с возможностью поворота первого колеса и второго колеса второго колесного узла 52 вокруг оси шкворня для изменения поворотного положения колес второго колесного узла 52.
Рулевой привод 92 может быть соединен с редуктором 94 рулевого управления. Редуктор 94 рулевого управления может быть соединен с рулевым механизмом 96. Рулевой механизм может быть присоединен к первому и второму колесам второго колесного узла 52. Рулевой механизм 96 может быть выполнен с возможностью сочленения или поворота первого колеса и второго колеса второго колесного узла 52 вокруг оси шкворня в ответ на вращение рулевого колеса 90. Рулевой механизм 96 может быть рулевым механизмом с реечной передачей, рулевым механизмом с циркулирующим шариком, рулевым механизмом с червяком и сектором, рулевым механизмом с переменным передаточным числом, системой рулевого управления с электроусилителем или другой конфигурацией, которая может сочленяться или поворачивать колеса транспортного средства. Поворотное положение второго колесного узла 52 может быть показано в качестве углового положения α колес, а соответствующее поворотное положение рулевого колеса 90 может быть показано в качестве углового положения β рулевого колеса.
Электродвигатель 98 рулевого управления с усилителем может быть соединен с рулевым приводом 92 и/или редуктором 94 рулевого управления. Электродвигатель 98 рулевого управления с усилителем может быть выполнен с возможностью сообщения движения или прикладывания крутящего момента к системе 22 рулевого управления, для поворачивания второго колесного узла 52. Электродвигатель 98 рулевого управления с усилителем может быть электродвигателем электроусилителя, выполненным с возможностью обеспечения содействия, водителю при поворачивании второго колесного узла 52 в ответ на поворачивание рулевого колеса 90.
Силовая передача 20 и система 22 рулевого управления может быть в соединении с контроллером 24. Контроллер 24 может быть в соединении с множеством датчиков транспортного средства. Множество датчиков транспортного средства может содержать датчик 120 рулевого управления, датчики 118 давления в шинах и датчиков 122 скорости вращения колес. Контроллер 24 может быть в соединении с множеством датчиков через проводные соединения, беспроводные соединения или может быть на связи с множеством датчиков через сеть шину (CAN) локальной сети контроллеров (CAN – Controller Area Network).
Датчик 120 рулевого управления может быть выполнен в виде датчика угла поворота рулевого колеса. Датчик 120 рулевого управления может быть расположен проксимально рулевого колеса 90 или может быть расположен проксимально редуктору 94 рулевого управления или рулевому механизму 96. Датчик 120 рулевого управления может быть выполнен с возможностью обеспечения данных, указывающих вращение рулевого колеса 90, такое как угловое положение β рулевого колеса.
Датчики 118 давления в шинах могут быть расположены внутри или проксимально шинам 60, 62, 70 и 72 транспортного средства. Датчик 118 давления в шине также может быть расположен внутри или проксимально запасной шине 128 транспортного средства. Запасная шина 128 транспортного средства может быть прикреплена к транспортному средству на любом жестком месте 130, в том числе кузове или раме транспортного средства 10. Запасная шина выполнена с возможностью замены любой из шин 60, 62, 70 или 72 транспортного средства в случае одной из шин транспортного средства, испытывающей отказ. Запасная шина 128 может иметь геометрию шины (например, радиус, диаметр, окружность, ширину), которая меньше, чем другие шины 60, 62, 70 и 72 транспортного средства. Датчики 118 давления в шинах могут сообщаться с контроллером 24, указывая состояние давления каждой из шин 60, 62, 70 и 72 транспортного средства, в том числе, запасной шины 128. Датчики 118 давления в шинах также могут сообщаться с контроллером 24, чтобы указывать, заменила ли запасная шина 128 какую-нибудь из других шин 60, 62, 70 или 72 транспортного средства. Связь между датчиками 118 давления в шинах и контроллером 24 может проводиться посредством беспроводной связи.
Датчики 122 скорости вращения колес могут быть расположены проксимально колесам транспортного средства. Например, датчик 122 скорости вращения колес может быть расположен проксимально первой шине 60 и второй шине 62 первого колесного узла 50. Датчик 122 скорости вращения колес также может быть расположен проксимально первой шине 70 и второй шине 72 второго колесного узла 52. Датчик 122 скорости вращения колес может быть выполнен с возможностью обеспечения скорости вращения или угловой скорость шины и соответствующего колеса.
Изменения радиуса шины могут быть результатом износа шины, изменений давления воздуха в шине, замены шины запасной шиной, повреждений шины или других проблем, которые могут оказывать влияние на радиус шины. Несколько способов, в том числе, определения угловой скорости рыскания, относительного изучения и изучения системы глобального позиционирования GPS (GPS - global positioning system), могут использоваться для определения или оценивания изменений радиуса шины. Способы могут применяться по отдельности, параллельно или последовательно и повторно, чтобы давать точную оценку радиусов шин или окружности шин во время ездового цикла, сравнивать оценку радиусов или окружности шин во время текущего ездового цикла и сравнивать ее с радиусами или окружностью шин из предыдущего ездового цикла, и обновлять контроллер 24 текущей информацией о радиусах или окружности из текущего ездового цикла.
Способ определения скорости рыскания может быть выполнен с возможностью расчета радиуса эталонной шины, Rr. Радиус эталонной шины, Rr, может быть радиусом по меньшей мере одной из шин, связанных с первым колесным узлом 50 и вторым колесным узлом 52. Например, радиус эталонной шины, Rr, может быть радиусом первой шины 60 первого колесного узла 50 или радиусом первой шины 70 второго колесного узла 52. Радиус эталонной шины, Rr, может быть основан на изменениях от исходного радиуса шины или радиуса установленной по умолчанию шины, узнанных из предыдущего ездового цикла, сохраненных в памяти.
Способ определения скорости рыскания затем может узнавать радиус шины, расположенной расстоянии латерально от эталонной шины, расположенной проксимально тому же самому мосту, во время текущего ездового цикла. Способ определения скорости рыскания затем может изучать оставшиеся радиусы шин транспортного средства посредством способа относительного изучения.
Способ определения скорости рыскания может быть выполнен с возможностью соотнесения скорости рыскания транспортного средства, ωz, скорости вращения эталонной шины, скорости вращения шины у шины, расположенной на расстоянии от эталонной шины, и ширины колеи транспортного средства, Tr, для оценивания радиуса эталонной шины, Rr. Скорость рыскания, ωz, может обеспечиваться в контроллер 24 другим контроллером транспортного средства или автономным датчиком 126 скорости рыскания.
Скорость вращения эталонной шины или угловая скорость может обеспечиваться датчиком 122 скорости вращения колеса, расположенным проксимально эталонной шине. Скорость вращения шины или угловая скорость шины, расположенной на расстоянии от эталонной шины, может обеспечиваться датчиком 122 скорости вращения колес, расположенного проксимально шине, расположенной на расстоянии от эталонной шины. Например, шина, расположенная на расстоянии от эталонной шины, может быть второй шиной 62 первого колесного узла 50, если эталонная шина является первой шиной 60 первого колесного узла 50, или может быть одной из первой шины 70 или второй шины 72 второго колесного узла 52, если соответствующая шина во втором колесном узле 52 является эталонной шиной.
Ширина колеи транспортного средства, Tr, может быть латеральным расстоянием между центральной линией первой шины 60 первого колесного узла 50 и второй шины 62 первого колесного узла 50. Ширина колеи транспортного средства, Tr, может быть латеральным расстоянием между центральной линией первой шины 70 второго колесного узла 52 и второй шины 72 второго колесного узла 52. Ширина колеи транспортного средства, Tr, может быть заданным значением, запрограммированным в контроллер 102. В по меньшей мере одном варианте осуществления, ширина колеи транспортного средства, Tr, может быть шириной полуколеи транспортного средства, HTr. Как подразумевает наименование, ширина полуколеи транспортного средства HTr, может быть половиной ширины колеи транспортного средства, Tr.
Способ определения скорости рыскания может применяться в ответ на удовлетворение условий отбора. Условия отбора, которые могут удовлетворяться до применения способа определения скорости рыскания, могут содержать угол поворота управляемых колес, обеспеченный датчиком 120 рулевого управления, являющийся большим, чем пороговое значение угла поворота управляемых колес, скорость транспортного средства, Vs, являющуюся меньшей, чем пороговое значение скорости транспортного средства, или скорость рыскания транспортного средства, ωz являющуюся большей, чем пороговое значение скорости рыскания транспортного средства. Условия отбораотбора могут быть выполнены для минимизации ошибок в способах изучения радиуса шины. Контроллер 24 может принимать радиус эталонной шины, Rr, основанный на измеренном угле поворота управляемых колес, скорости рыскания транспортного средства, ωz, угловой скорости эталонной шины, ωR и угловой скорости шины, которая расположена на расстоянии латерально от и расположена на том же мосте, что и эталонная шина, ωT.
Способ определения скорости рыскания может рассчитывать радиус эталонной шины, Rr, на основании Уравнения (1):
 (1)
(1)
Способ определения скорости рыскания затем может использоваться для расчета радиуса шины, которая расположена на расстоянии латерально от и расположена на том же мосте, что и эталонная шина, Rt, на основании Уравнения (2):
 (2)
(2)
γ может быть изученным отношением радиусов, Rt/Rr, узнанным во время прямолинейного вождения посредством способа относительного изучения. Мгновенные значения радиуса эталонной шины, Rr, могут суммироваться и усредняться. Окончательный радиус эталонной шины, Rr, может периодически обновляться во время ездового цикла. Способ относительного изучения может быть выполнен с возможностью расчета первой оценки радиуса шины, Rf. Контроллер 24 может быть выполнен с возможностью применения способа относительного изучения в ответ на транспортное средство 10, едущее приблизительно по прямой линии. Условия отбора, которые могут удовлетворяться до применения способа относительного изучения, могут включать в себя угол поворота управляемых колес, обеспеченный датчиком 120 рулевого управления, являющийся меньшим, чем пороговое значение угла поворота управляемых колес, и скорость транспортного средства, Vs, являющуюся большей, чем пороговое значение скорости транспортного средства. Условия отбора могут подтверждать, что транспортное средство едет приблизительно прямолинейно с низкой величиной пробуксовки колес. Контроллер 24 может принимать первую оценку радиуса шины, Rf, основанную на радиусе эталонной шины, Rr, или основанную на угловой скорости эталонной шины, ωR, и угловой скорости первой шины, ωF. Скорость вращения или угловая скорость эталонной шины может обеспечиваться датчиком 122 скорости вращения колеса, расположенным проксимально эталонной шине. Скорость вращения или угловая скорость первой шины может обеспечиваться датчиком 122 скорости вращения колеса, расположенным проксимально первой шине.
Способ относительного изучения может рассчитывать процентное различие размера радиуса первой шины, Rf, относительно радиуса эталонной шины, Rr, во время текущего ездового цикла. Способ относительного изучения может рассчитывать процентное различие размера на основании уравнения (3):
 (3)
(3)
Мгновенные результаты процентного различия размера могут суммироваться и усредняться или отсеиваться. Заключительное значение относительного изменения размера может периодически обновляться во время ездового цикла. Способ относительного изучения затем может определять радиус первой шины, Rf, на основании процентного различия. Изученное отношение радиусов, γ, может рассчитываться в качестве отношения между радиусом первой шины, Rf, которая может быть эталонной шиной, и радиусом эталонной шины, Rr. Изученное отношение радиусов, γ, затем может подаваться обратно в способ определения скорости рыскания, если радиус эталонной шины, Rr, и радиус первой шины, Rf, относятся к шинам, которые расположены на расстоянии друг от друга и расположены на одном и том же мосте.
Любая из шин транспортного средства может быть назначена эталонной шиной с использованием способа относительного изучения. Способ относительного изучения затем может использоваться для определения радиуса любой из оставшихся шин, которые не назначены эталонной шиной, безотносительно к тому, находятся ли они в том же колесном узле, что и эталонная шина.
Способ GPS изучения может быть выполнен с возможностью расчета второй оценки радиуса шины, Rs, во время текущего ездового цикла. Способ GPS изучения может применяться в ответ на удовлетворение условий отбора. Условия отбора, которые могут удовлетворяться до применения способа GPS изучения, могут включать в себя скорость транспортного средства, Vs, являющуюся большей, чем пороговое значение скорости транспортного средства, угол поворота управляемых колес, являющийся меньшим, чем пороговое значение угла поворота управляемых колес, ускорение транспортного средства, являющееся меньшим, чем пороговое значение ускорения транспортного средства, или скорость рыскания транспортного средства, являющуюся меньшей, чем пороговая значение скорость рыскания транспортного средства. Эти условия отбора могут указывать, что транспортное средство 10 едет по прямой линии. Контроллер 24 может принимать вторую оценку радиуса шины, Rs, основанную на скорости транспортного средства по GPS, угловой скорости шины, полученной во время ездового цикла, или оценке пробуксовки колеса. Скорость транспортного средства по GPS может быть скоростью транспортного средства, выведенной из модуля 108 GPS (гаверсинусной скоростью).
Способ GPS изучения может рассчитывать вторую оценку радиуса шины, Rs, на основании уравнения (4):
 (4)
(4)
ωs - угловая скорость по меньшей мере одной из первой шины 60 и второй шины 62 первого колесного узла 50, и первой шины 70 и второй шины 72 второго колесного узла 52. Угловая скорость может обеспечиваться датчиком 122 скорости вращения колеса, расположенного проксимально соответствующей шине.
s - оценка пробуксовки колеса по меньшей мере одной шины, рассчитанная на основании уравнения (5):
 (5)
(5)
Где Tx - крутящий момент на колесе по меньшей мере одной шины первого колесного узла 50 и второго колесного узла 52.
r - номинальный радиус шины по меньшей мере одной из шин транспортного средства, хранимый в памяти.
F - оцененная нормальная нагрузка, приложенная к по меньшей мере одной из шин транспортного средства.
C - продольная жесткость по меньшей мере одной из шин транспортного средства в зависимости от оцененного коэффициента трения поверхности дороги, μ, и предполагается постоянной.
Скорость транспортного средства по GPS может испытывать задержки во время событий ускорения и замедления транспортного средства. Задержка может компенсироваться контроллером 24 для избегания ошибки оценки радиуса. Задержка может компенсироваться посредством реализации способа интерполяции между двумя следующими друг за другом показаниями скорости, сохраняя предыдущее показание скорости из предыдущего повторения в памяти, например, СППЗУ (стираемом программируемом постоянном запоминающем устройстве, EPROM).
Контроллер 24 может сравнивать результаты радиуса эталонной шины, Rr, первую оценку радиуса шины, Rf, и вторую оценку радиуса шины, Rs, друг с другом. Контроллер 24 может отбирать по меньшей мере одну из первой оценки радиуса шины, Rf, и второй оценки радиуса шины, Rs, на основании зрелости оценки. Зрелой оценкой может быть оценка радиуса шины, которая бралась недавнее всего по времени или подвергалась выборке в течение более длительных периодов времени в течение ездового цикла. В по меньшей мере одном варианте осуществления, если первая оценка радиуса шины, Rf, и вторая оценка радиуса шины, Rs, обе применялись к одной и той же шине, первая оценка радиуса шины, Rf, может сливаться со второй оценкой радиуса шины, Rs, согласно способу наименьших квадратов или другому статистическому способу предоставления оценки радиуса шины, Re, которой может обновляться контроллер 24.
Контроллер 24 может быть в соединении с устройством 132 предупреждения о запасной шине и может быть запрограммирован с возможностью передачи выходного сигнала в устройство 132 предупреждения о запасной шине, указывающий, что запасная шина 128 используется в настоящее время. Как только оно приняло сигнал из контролера 24, устройство 132 предупреждения о запасной шине затем может быть выполнено с возможностью обеспечения предупреждения пользователю транспортного средства, что запасная шина 128 используется. Предупреждение, выдаваемое пользователю транспортного средства, что запасная шина 128 находится в использовании, может быть визуальным, слышимым или тактильным по существу. Например, визуальное предупреждение может содержать предупредительный световой сигнал на приборной панели, который засвечивается, когда используется запасная шина 128, слышимое предупреждение может быть тревожной сигнализацией, которая передается слышимым образом через громкоговоритель, когда запасная шина 128 используется, а тактильное предупреждение может включать в себя электродвигатель, расположенный в рулевом колесе или сиденье транспортного средства, который вибрирует, когда используется запасная шина 128.
Контроллер 24 также может быть в соединении с устройством 134 предупреждения об ограничении скорости запасной шины и может быть запрограммирован с возможностью передачи выходного сигнала в устройство 134 предупреждения об ограничении скорости запасной шины, если транспортное средство 10 превышает рекомендованное предельное значение скорости транспортного средства, когда используется запасная шина 128. Как только оно приняло сигнал из контроллера 24, устройство 134 предупреждения об ограничении скорости запасной шины затем может обеспечивать предупреждение пользователю транспортного средства, что скорость транспортного средства, Vs, превысила рекомендованную скорость транспортного средства, когда используется запасная шина 128. Предупреждение, выдаваемое пользователю транспортного средства, что транспортное средство превысило рекомендованную скорость, когда используется запасная шина 128, может быть визуальным, слышимым или тактильным по существу, аналогично примерам, описанным выше со ссылкой на устройство 132 предупреждения о запасной шине.
Контроллер 24 дополнительно может находиться в соединении с измерительным средством 136, которое отображает оставшийся рекомендованный срок использования (или заданную максимальную долговечность) запасной шины 128. Контроллер 24 может быть выполнен с возможностью отслеживания использования запасной шины 128, как только было определено, что запасная шина 128 находится в использовании. Контроллер 24 затем может выводить сигнал в измерительное средство 136, указывающее оставшееся рекомендованное использование запасной шины 128. Измерительное средство 136 затем может отображать оставшийся рекомендованный срок службы запасной шины 128. Измерительное средство 136 может отображать оставшийся срок службы запасной шины 128 в милях, километрах или любых других надлежащих единицах измерения. Измерительное средство 136 может быть аналоговым (например, с круговой шкалой) или цифровым измерительным средством (например, с цифровым числовым устройством отображения). Если измерительное средство 136 является цифровым измерительным средством, измерительное средство может иметь цветовое кодирование, указывающее, что запасная шина находится близко к заданной максимальной долговечности. Например, измерительное средство может содержать зеленый, желтый и красный цвета, которые связаны с оставшимся сроком службы запасной шины 128, причем, зеленый указывает небольшое использование запасной шины 128, а красный указывает, что запасная шина 128 близка к своему максимальному рекомендованному использованию.
Как только запасная шина 128 была использована сверх рекомендованного срока использования, контроллер 24 может быть выполнен с возможностью передачи выходного сигнала в устройство 138 предупреждения о чрезмерном использовании запасной шины. Как только оно приняло сигнал из контроллера 24, устройство 138 предупреждения о чрезмерном использовании запасной шины затем может обеспечивать предупреждение пользователю транспортного средства, что запасная шина 128 была использована сверх рекомендованного срока использования. Предупреждение, выдаваемое пользователю транспортного средства, что запасная шина 128 была использована сверх ее рекомендованного срока использования, может быть визуальным, слышимым или тактильным по существу, аналогично примерам, описанным выше со ссылкой на устройство 132 предупреждения о запасной шине.
Ссылаясь на фиг.2, проиллюстрирован способ 200 контроля использования запасной шины 128 в транспортном средстве 10. Способ 200 инициируется на этапе 202 «запуск» блок-схемы. Способ 200 может инициироваться установкой зажигания транспортного средства в положение «Вкл.», установкой трансмиссии 42 транспортного средства на выбор определенной передачи, транспортным средством 10, превышающим заданное пороговое значение скорости, или любым другим надлежащим условием, так чтобы было желательно контролировать, используется ли запасная шина.
На этапе 204, определяется геометрия первой шины и геометрия второй шины. Геометрия, определенная на этапе 204, может включать в себя, но не в качестве ограничения, окружность шины, диаметр шины, радиус шины и ширину шины. В одном из вариантов осуществления, этап 204 может включать в себя оценивание радиуса первой шины, R1, и радиуса второй шины, R2, с использованием способа оценки радиуса шины. Способ оценки радиуса шины может включать в себя способы оценки радиуса шины, описанные выше, а именно, способ определения скорости рыскания, способ относительного изучения и способ GPS изучения. Эти способы могут использоваться в одиночку, в различных комбинациях, последовательно или параллельно. Как уже описано, эти способы могут включать в себя оценивание радиуса шины на основании отношения между радиусом первой шины, R1, и радиуса второй шины, R2, угловой скорости первой шины, ω1, угловой скорости второй шины, ω2, скорости рыскания, ωz, скорости транспортного средства, Vs, скорости транспортного средства по GPS (выходного сигнала из модуля 108 GPS), оценки пробуксовки колеса и ширины колеи транспортного средства, Tr (или ширины полуколеи, HTr). Настоящее изобретение, однако, не должно толковаться в качестве ограниченного способами оценки радиуса шины, описанными в материалах настоящего описания, но должно толковаться включающим в себя все способы оценки геометрии и радиуса шины, известные в данной области техники.
На этапе 206, как только геометрия первой шины и геометрия второй шины были оценены, способ 200 определяет, превышает ли разность между геометрией первой шины и геометрией второй шины пороговое значение, на этапе 206. Если разность между геометрией первой шины и геометрией второй шины не превышает пороговое значение, способ 200 возвращается на этап 204. Способ 200 может непрерывно контролировать геометрии первой шины и второй шины на этапе 204, или может быть задержка по времени перед тем, как способ 200 инициирован повторно. Задержка по времени может соответствовать событию, такому как выключение и установка снова в положение «Вкл.» зажигания транспортного средства, установка трансмиссии 42 транспортного средства на определенный выбор передачи, достижение транспортным средством 10 полной остановки перед повторным пуском в ход, и т.д. Если разность между геометрией первой шины и геометрией второй шины превышает пороговое значение, способ 200 переходит на этап 208, где вырабатывается сигнал, указывающий использование запасной шины 128. Сигнал, указывающий использование запасной шины 128, может быть выходным сигналом из контроллера 24, который передается в устройство 132 предупреждения о запасной шине, чтобы информировать пользователя транспортного средства, что запасная шина 128 используется в настоящее время.
На этапе 210, как только был выведен сигнал, указывающий, что запасная шина 128 используется в настоящее время, способ 200 определяет, превышает ли транспортное средство 10 рекомендованное предельное значение скорости транспортного средства, в то время как используется запасная шина 128. Если транспортное средство 10 не превышает рекомендованное предельное значение скорости транспортного средства, этап 210 будет повторяться до тех пор, пока остается выходной сигнал, указывающий, что запасная шина 128 используется в настоящее время. Если транспортное средство 10 превышает рекомендованное предельное значение скорости транспортного средства, в то время как используется запасная шина 128, способ 200 переходит на этап 212, где вырабатывается сигнал, указывающий, что транспортное средство 10 превысило рекомендованное предельное значение скорости транспортного средства, в то время как используется запасная шина 128. Сигнал, указывающий, что транспортное средство превысило рекомендованное предельное значение скорости транспортного средства, в то время как используется запасная шина 128, может быть выходным сигналом из контроллера 24, который передается в устройство 134 предупреждения об ограничении скорости запасной шины, чтобы информировать пользователя транспортного средства, что это предельное значение скорости транспортного средства превысило рекомендованное предельное значение скорости транспортного средства, в то время как используется запасная шина 128.
На этапе 214, как только был выведен сигнал, указывающий, что запасная шина 128 используется в настоящее время, способ 200 также определяет, превысило ли использование запасной шины рекомендованный срок использования (или максимальную долговечность) запасной шины 128. Если рекомендованный срок использования запасной шины 128 был превышен, способ 200 переходит на этап 216, где вырабатывается сигнал, указывающий, что использование запасной шины превысило рекомендованный срок использования запасной шины 128. Сигнал, указывающий, что использование запасной шины превысило рекомендованный срок использования, может быть выходным сигналом из контроллера 24, который передается в устройство 138 предупреждения о чрезмерном использовании запасной шины, чтобы информировать пользователя транспортного средства, что запасная шина 128 была использована сверх максимального рекомендованного использования. Если рекомендованный срок использования запасной шины 128 не был превышен на этапе 214, способ 200 переходит на этап 218, где вырабатывается сигнал, указывающий оставшийся срок использования запасной шины 128. Сигнал, указывающий оставшийся срок использования запасной шины 128, может быть выходным сигналом из контроллера 24, который передается в измерительное средство 136, для отображения оставшегося срока использования запасной шины пользователю транспортного средства.
Словесные формулировки, используемые в описании изобретения, предпочтительнее являются словесными формулировками описания, нежели ограничением, и понятно, что различные изменения могут быть произведены, не отходя от сущности и объема настоящего изобретения. Как описано ранее, элементы различных вариантов осуществления могут комбинироваться для формирования дополнительных вариантов осуществления изобретения, которые могут быть не описаны или не проиллюстрированы в прямой форме. Несмотря на то, что различные варианты осуществления могли бы быть описаны в качестве обеспечивающих преимущества или являющихся предпочтительными над другими вариантами осуществления или реализациями предшествующего уровня техники, что касается одной или более требуемых характеристик, рядовые специалисты в данной области техники осознают, что один или более элементов или характеристик могут быть скомпрометированы для достижения требуемых общих свойств системы, которые зависят от конкретных применения и реализации. Эти свойства могут включать в себя, но не в качестве ограничения: себестоимость, прочность, надежность, затраты в течение жизненного цикла, пригодность для продажи, внешний вид, упаковку, габариты, ремонтопригодность, вес, технологичность, легкость сборки, и т.д. По существу, варианты осуществления, описанные в качестве менее желательных, чем другие варианты осуществления, или реализации предшествующего уровня техники по отношению к одной или более характеристик, не выходят за пределы объема настоящего изобретения и могут быть желательными для конкретных применений.
Система контроля запасной шины содержит контроллер, запрограммированный с возможностью вывода сигнала, указывающего, что запасная шина используется в настоящее время, в ответ на разность между радиусом первой шины и радиусом второй шины, превышающую пороговое значение. Технический результат – повышение эффективности контроля использования запасной шины. 3 н. и 17 з.п. ф-лы, 2 ил.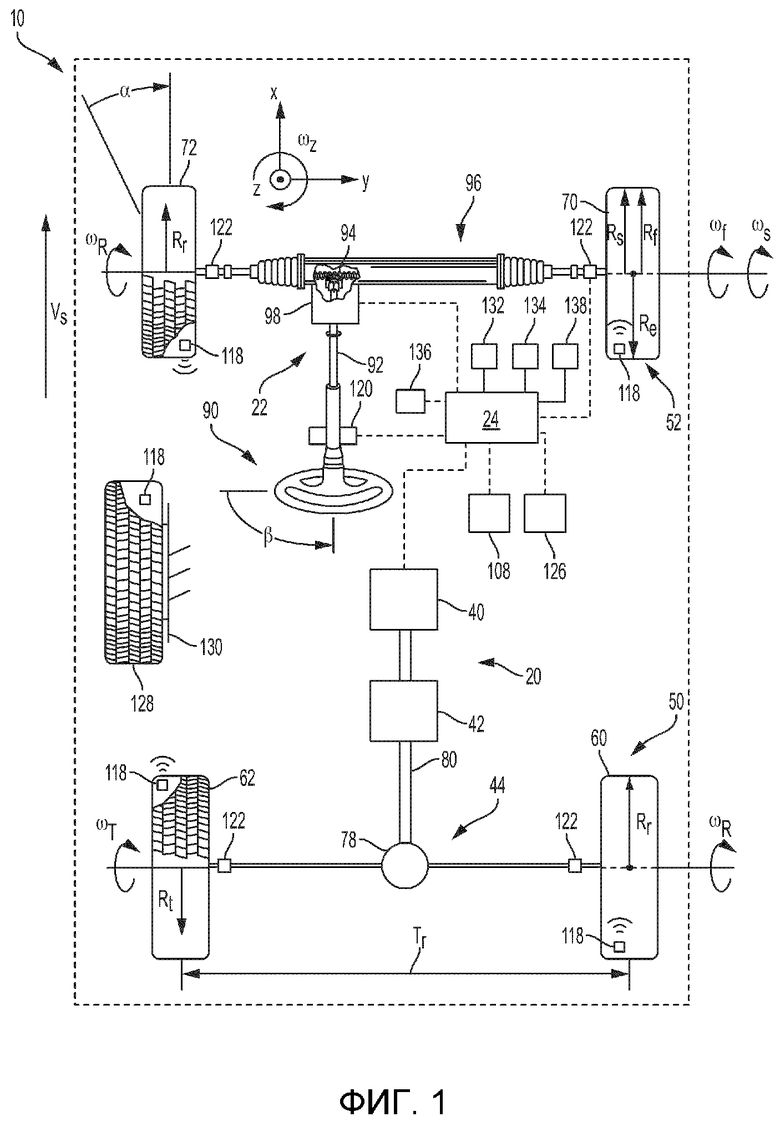
1. Транспортное средство, содержащее:
множество шин;
запасную шину; и
контроллер, запрограммированный с возможностью вывода сигнала указывающего, что запасная шина заменила одну из множества шин, в ответ на разность между радиусом первой шины и радиусом второй шины, превышающую пороговое значение.
2. Транспортное средство по п.1, в котором разность между радиусом первой шины и радиусом второй шины основана на отношении между радиусом первой шины и радиусом второй шины.
3. Транспортное средство по п.2, в котором отношение между радиусом первой шины и радиусом второй шины основано на угловой скорости первой шины и угловой скорости второй шины.
4. Транспортное средство по п.1, в котором радиус первой шины и радиус второй шины основаны на скорости рыскания транспортного средства.
5. Транспортное средство по п.4, в котором радиус первой шины также основан на угловой скорости первой шины, угловой скорости второй шины, отношении между радиусом первой шины и радиусом второй шины и ширине колеи транспортного средства.
6. Транспортное средство по п.5, в котором радиус второй шины также основан на угловой скорости первой шины, угловой скорости второй шины, ширине колеи и радиусе первой шины.
7. Транспортное средство по п.1, в котором радиус первой шины основан на угловой скорости первой шины и скорости транспортного средства, а радиус второй шины основан на угловой скорости второй шины и скорости.
8. Транспортное средство по п.7, в котором скорость выводится из модуля системы глобального позиционирования (GPS).
9. Транспортное средство по п.8, в котором радиус первой шины также основан на оценке пробуксовки первой шины, и радиус второй шины также основан на оценке пробуксовки второй шины.
10. Транспортное средство по п.1, дополнительно содержащее измерительное средство, выполненное с возможностью отображения оставшегося срока службы запасной шины, при этом контроллер дополнительно запрограммирован с возможностью вывода сигнала, указывающего оставшийся срок службы запасной шины, основанный на заданной максимальной долговечности запасной шины, в ответ на сигнал, указывающий, что запасная шина заменила одну из множества шин.
11. Система контроля запасной шины, содержащая:
контроллер, запрограммированный с возможностью вывода сигнала указывающего, что запасная шина используется в настоящее время, в ответ на разность между параметром, указывающим геометрию первой шины, и параметром, указывающим геометрию второй шины, превышающую пороговое значение.
12. Система контроля запасной шины по п.11, в которой разность основана на отношении между радиусом первой шины и радиусом второй шины.
13. Система контроля запасной шины по п.12, в которой отношение основано на угловой скорости первой шины и угловой скорости второй шины.
14. Система контроля запасной шины по п.12, в которой радиус первой шины и радиус второй шины основаны на скорости рыскания транспортного средства.
15. Система контроля запасной шины по п.14, в которой радиус первой шины основан на угловой скорости первой шины, угловой скорости второй шины, отношении между радиусом первой шины и радиусом второй шины и ширине колеи транспортного средства.
16. Система контроля запасной шины по п.15, в которой радиус второй шины также основан на угловой скорости первой шины, угловой скорости второй шины, ширине колеи транспортного средства и радиусе первой шины.
17. Система контроля запасной шины по п.12, в которой радиус первой шины основан на угловой скорости первой шины и скорости транспортного средства, выведенной из модуля GPS, а радиус второй шины основан на угловой скорости второй шины и скорости транспортного средства.
18. Система контроля запасной шины по п.17, радиус первой шины также основан на оценке пробуксовки первой шины, и радиус второй шины также основан на оценке пробуксовки второй шины.
19. Система контроля запасной шины по п.11, дополнительно содержащая измерительное средство, выполненное с возможностью отображения оставшегося срока службы запасной шины, при этом контроллер дополнительно запрограммирован с возможностью вывода сигнала в ответ на сигнал, указывающий, что запасная шина используется в настоящее время, указывающего оставшийся срок службы запасной шины, основанный на заданной максимальной долговечности запасной шины.
20. Способ контроля использования запасной шины, включающий в себя этапы, на которых:
в ответ на разность между радиусом первой шины и радиусом второй шины, превышающую пороговое значение, выдают предупреждение, что запасная шина используется в настоящее время, и отображают оставшийся срок использования запасной шины.
| US 6941802 B2, 13.09.2005 | |||
| US 7030745 B2, 18.04.2006 | |||
| US 7576640 B2, 18.08.2009. |

