Область техники, к которой относится изобретение
Настоящее изобретение относится к системе транспортного средства для обнаружения аномального состояния водителя и к способу, в котором используется данная система.
Уровень техники
Современные механизмы определения состояния водителя транспортного средства, основанные на управляющих действиях водителя, например, действиях по управлению ускорением, торможением и направлением движения, имеют некоторые недостатки. Например, могут быть обнаружены аномалии управления движением, которые могут указывать на наличие ситуаций, связанных с высокой нагрузкой на водителя, или на небезопасное состояние водителя, в том числе, утомление или сонливость. Однако существующие механизмы могут не учитывать различные состояния водителя, которые могут быть обнаружены на основании анализа действий водителя по управлению направлением движения при разных частотах.
Раскрытие изобретения Предложена система транспортного средства для обнаружения аномальных состояний водителя, которая включает в себя компьютер в транспортном средстве с процессором и запоминающим устройством, выполненный с возможностью:
собирать данные о траектории транспортного средства;
рекурсивно определять дисперсию данных о траектории;
вычислять зависящую от скорости весовую функцию для получения зависящего от скорости весового значения;
определять показатель аномального состояния на основании, по крайней мере отчасти, применения зависящего от скорости весового значения для рекурсивно определенной величины дисперсии.
Данные о траектории транспортного средства могут представлять собой данные о скорости рысканья или данные об угле поворота рулевого колеса.
Компьютер может быть дополнительно выполнен с возможностью использовать показатель аномального состояния для обнаружения условия аномального движения.
Компьютер может быть дополнительно выполнен с возможностью подсчитывать количество случаев, когда значение показателя аномального состояния превышает заранее заданное пороговое значение во время обнаружения аномального условия движения.
Аномальное условие движения может представлять собой высокую нагрузку на водителя, сонливость или ухудшенное состояние водителя.
Компьютер может быть дополнительно выполнен с возможностью применять полосовой фильтр для получения показателя аномального состояния.
Полосовой фильтр может использовать поэтапную задержку.
Компьютер может быть дополнительно выполнен с возможностью инструктировать контроллер в транспортном средстве для выполнения действия на основании показателя аномального состояния.
Предложен способ обнаружения аномальных состояний водителя, в котором:
собирают данные о траектории транспортного средства;
рекурсивно определяют дисперсию данных о траектории;
вычисляют зависящую от скорости весовую функцию для получения зависящего от скорости весового значения;
определяют показатель аномального состояния на основании, по крайней мере отчасти, применения зависящего от скорости весового значения для рекурсивно определенной величины дисперсии.
В способе могут дополнительно использовать показатель аномального состояния для обнаружения аномального условия движения.
В способе могут дополнительно подсчитывать количество случаев, когда значение показателя аномального состояния превышает заранее заданное пороговое значение во время обнаружения аномального условия движения.
В способе могут дополнительно применять полосовой фильтр для получения показателя аномального состояния.
В способе могут дополнительно инструктировать контроллер в транспортном средстве для выполнения действия на основании показателя аномального состояния.
Предложен энергонезависимый машиночитаемый носитель, на котором физически хранятся исполняемые компьютером инструкции для:
сбора данных о траектории транспортного средства;
рекурсивного определения дисперсии данных о траектории;
вычисления зависящей от скорости весовой функции для получения зависящего от скорости весового значения;
определения показателя аномального состояния на основании, по крайней мере отчасти, применения зависящего от скорости весового значения для рекурсивно определенной величины дисперсии.
Носитель может включать в себя инструкции для использования показателя аномального состояния для обнаружения аномального условия движения.
Краткое описание чертежей
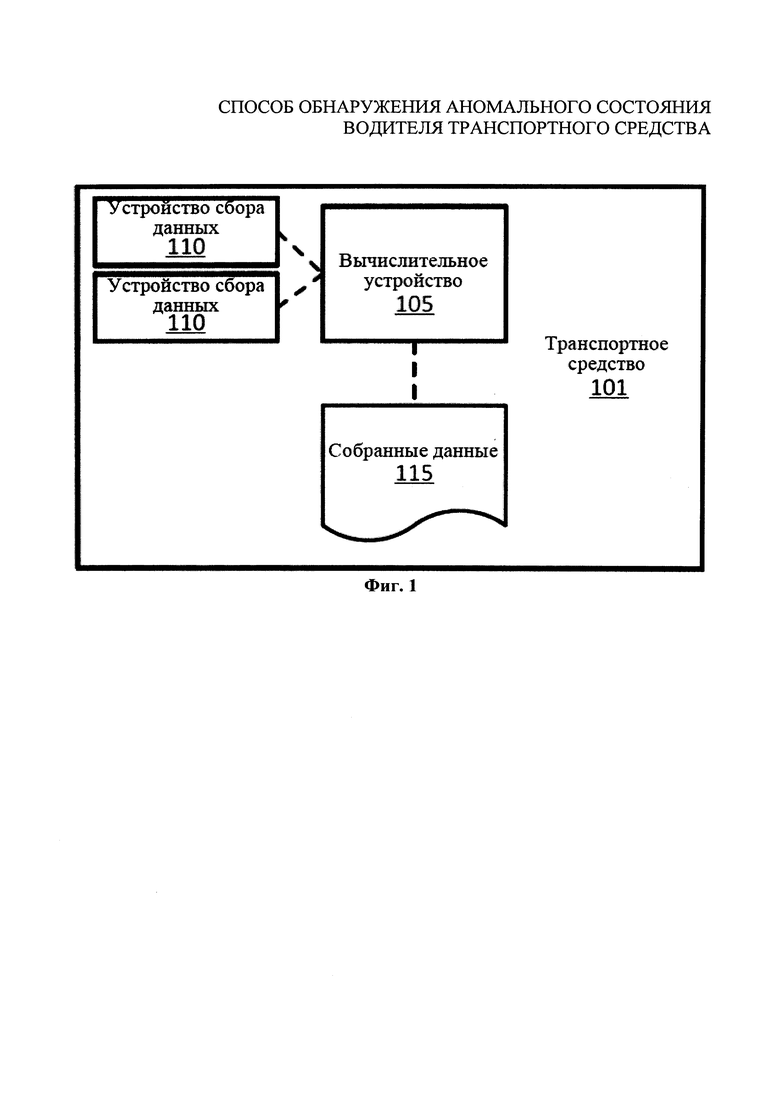
На фиг. 1 представлена схема системы транспортного средства, позволяющая обнаруживать аномальные состояния водителя.
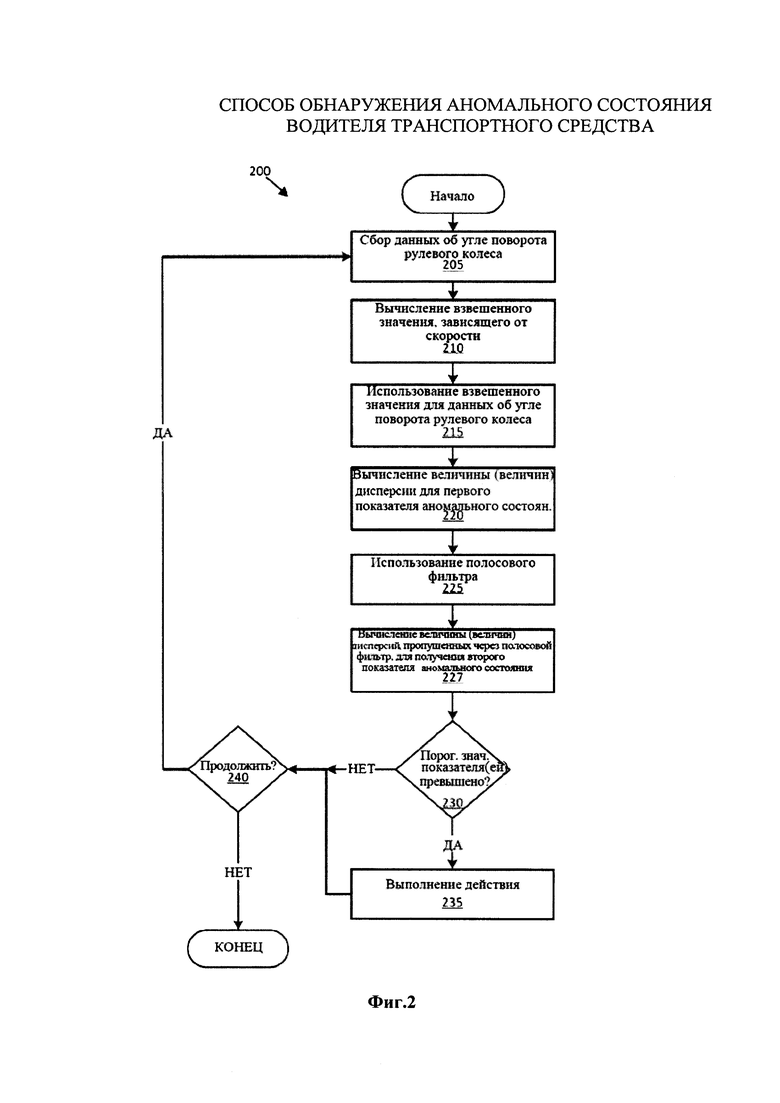
На фиг. 2 представлена блок-схема примера способа обнаружения аномальных состояний водителя.
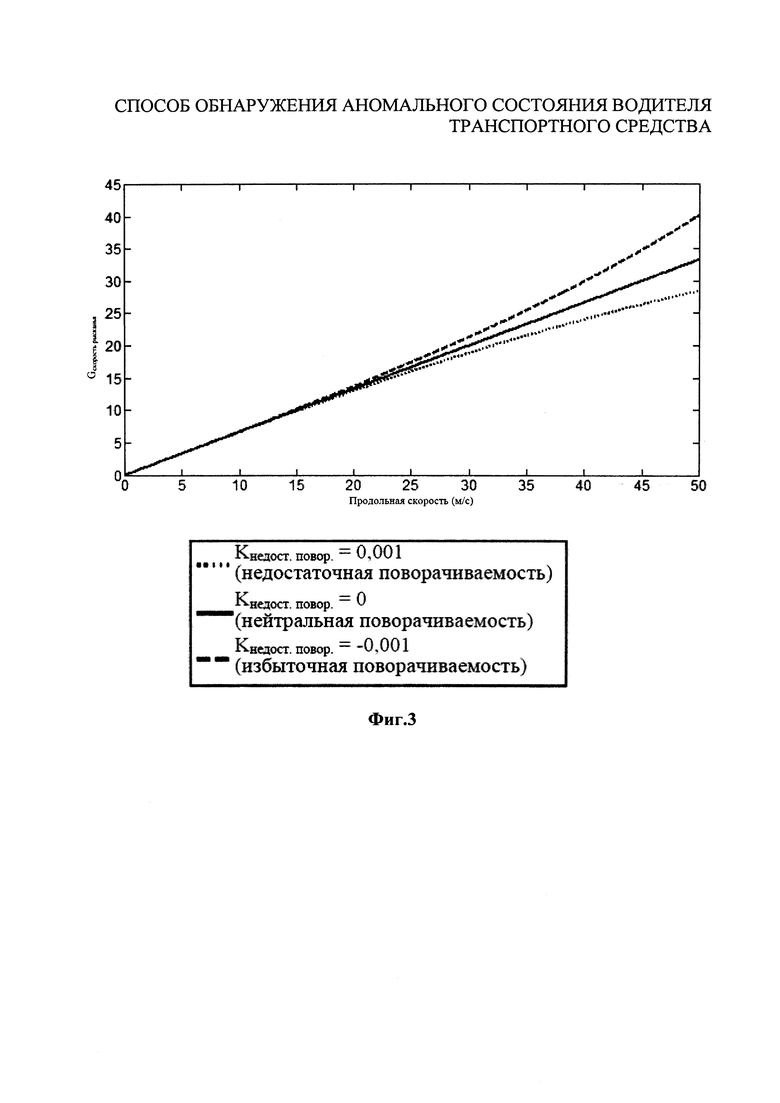
На фиг. 3 представлен пример графика зависимости коэффициента усиления по скорости рысканья от продольной скорости транспортного средства.
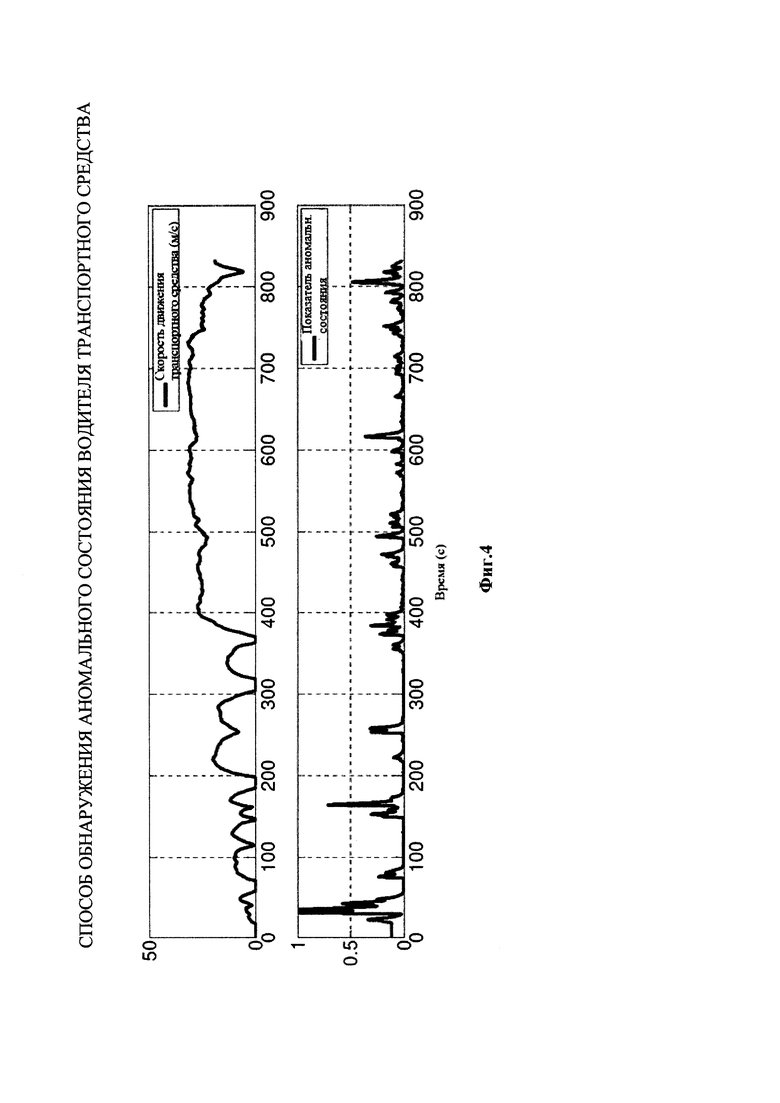
На фиг. 4 представлены примеры графиков данных теста транспортного средства, относящихся к показателю аномального состояния.
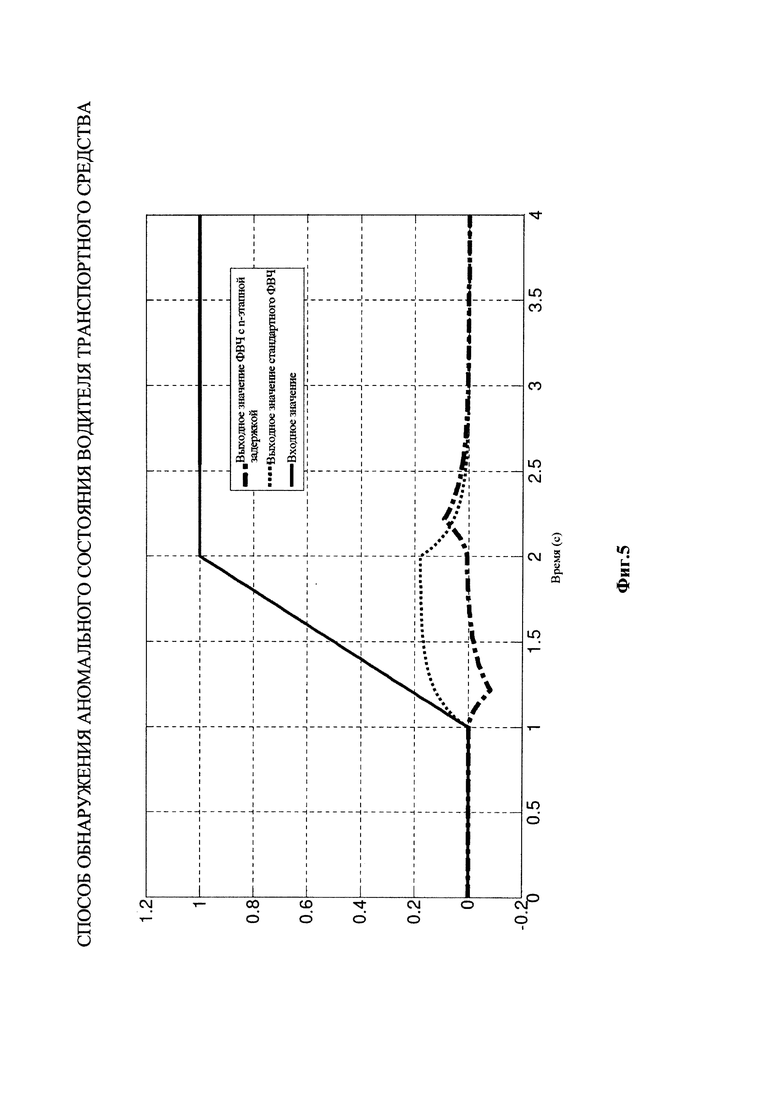
На фиг. 5 представлен пример графика временных характеристик модифицированного фильтра верхних частот.
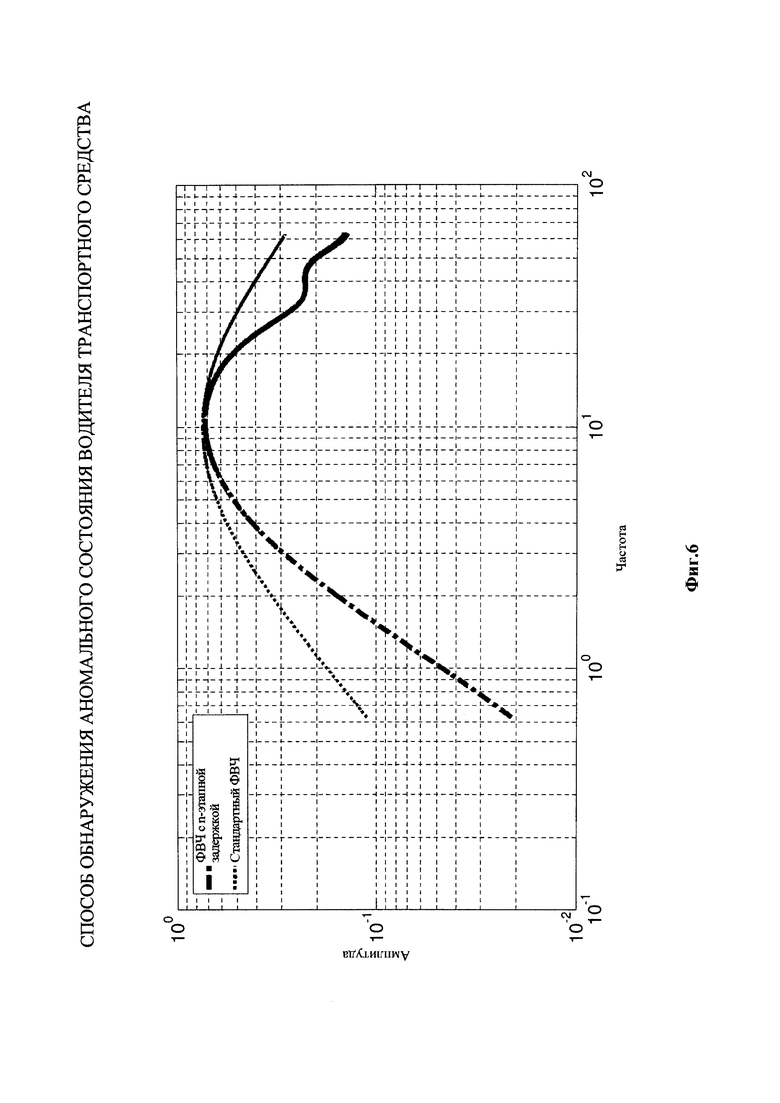
На фиг. 6 представлен пример графика частотных характеристик модифицированного фильтра верхних частот.
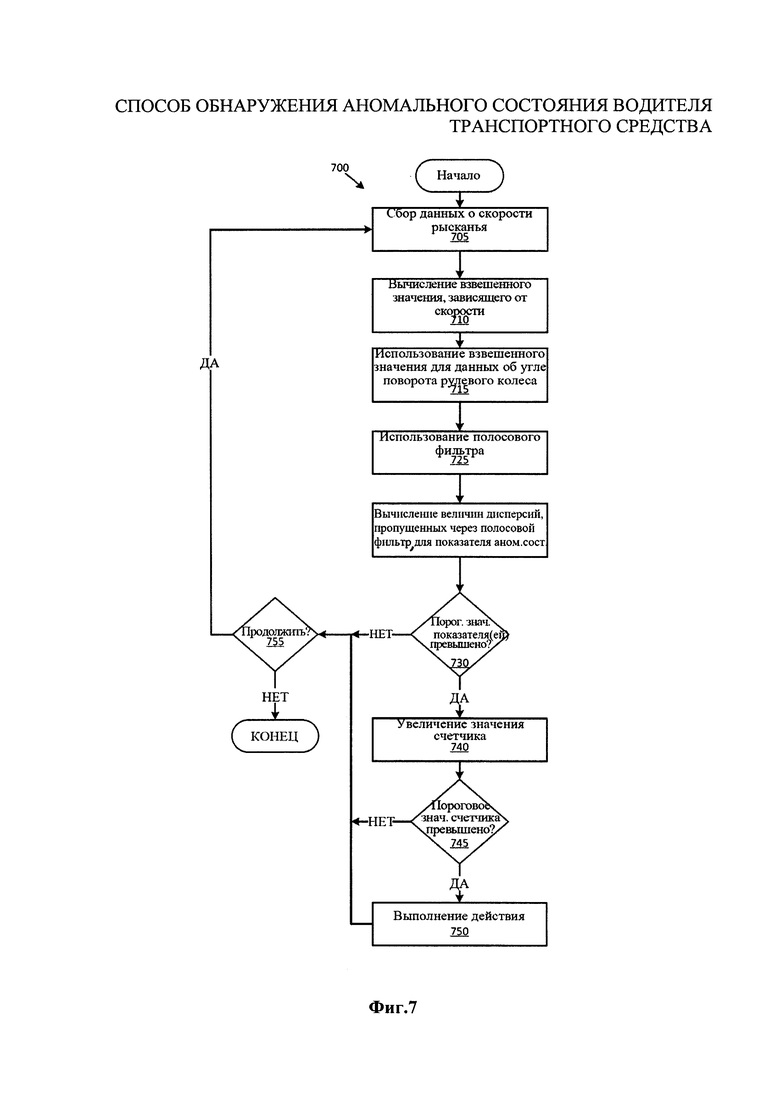
На фиг. 7 представлена блок-схема альтернативного или дополнительного примера способа обнаружения аномального условия движения, например, сонливого условия движения.
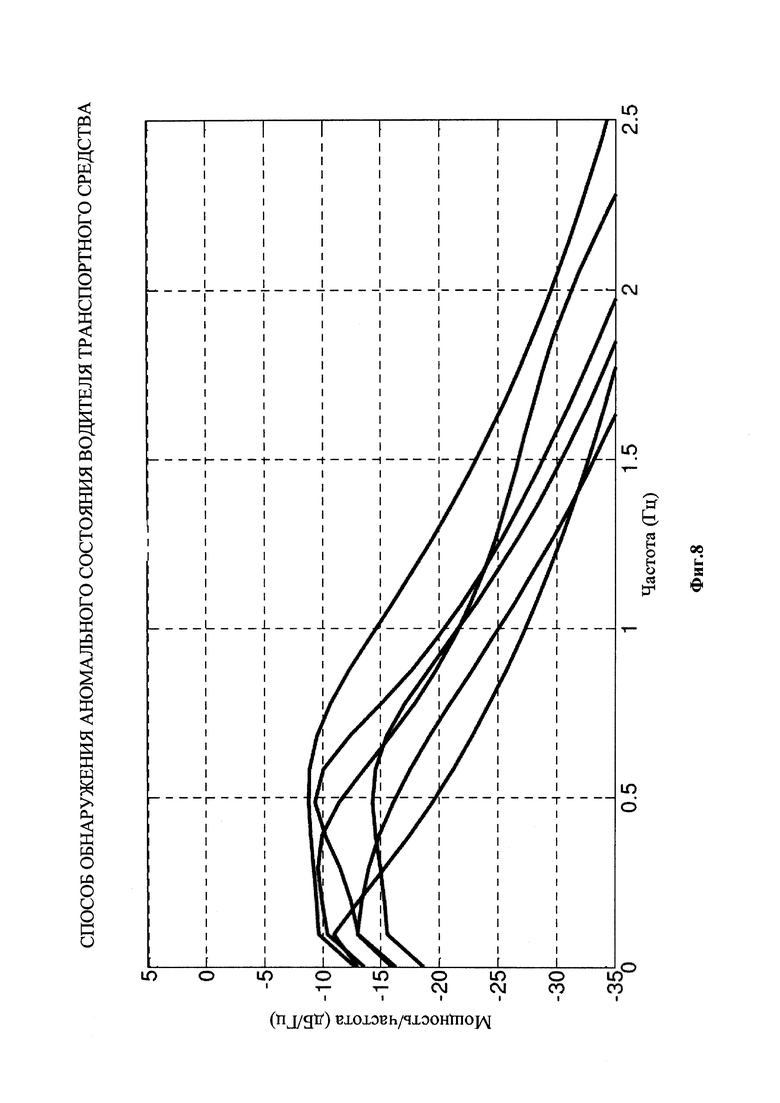
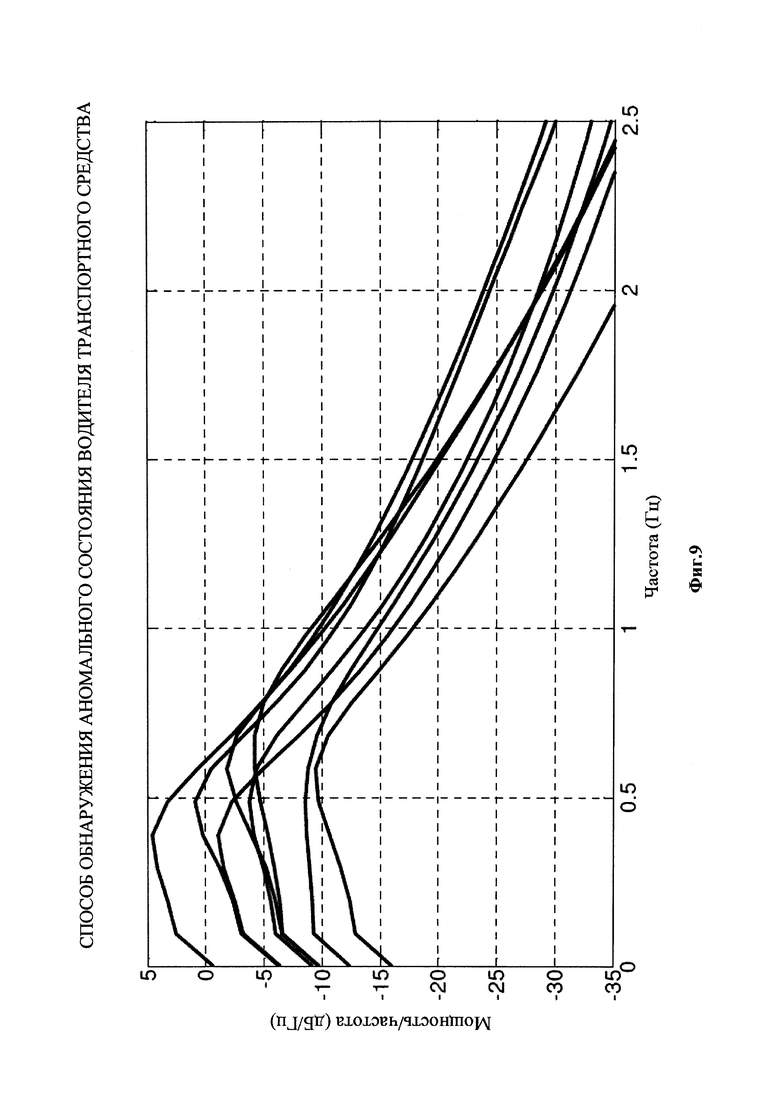
На фиг. 8 представлен пример графика оценочных значений спектральной плотности мощности для дисперсий скорости рысканья при бодром состоянии водителя, а на фиг. 9 представлен пример графика оценочных значений спектральной плотности мощности для дисперсий скорости рысканья.
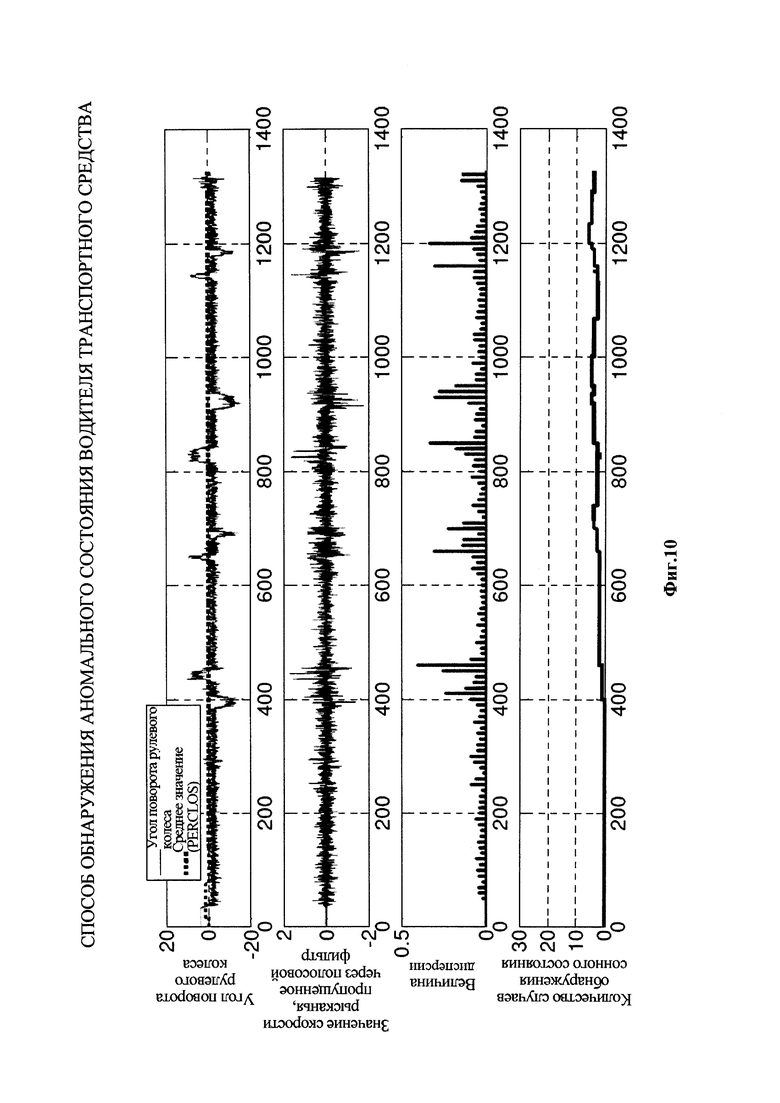
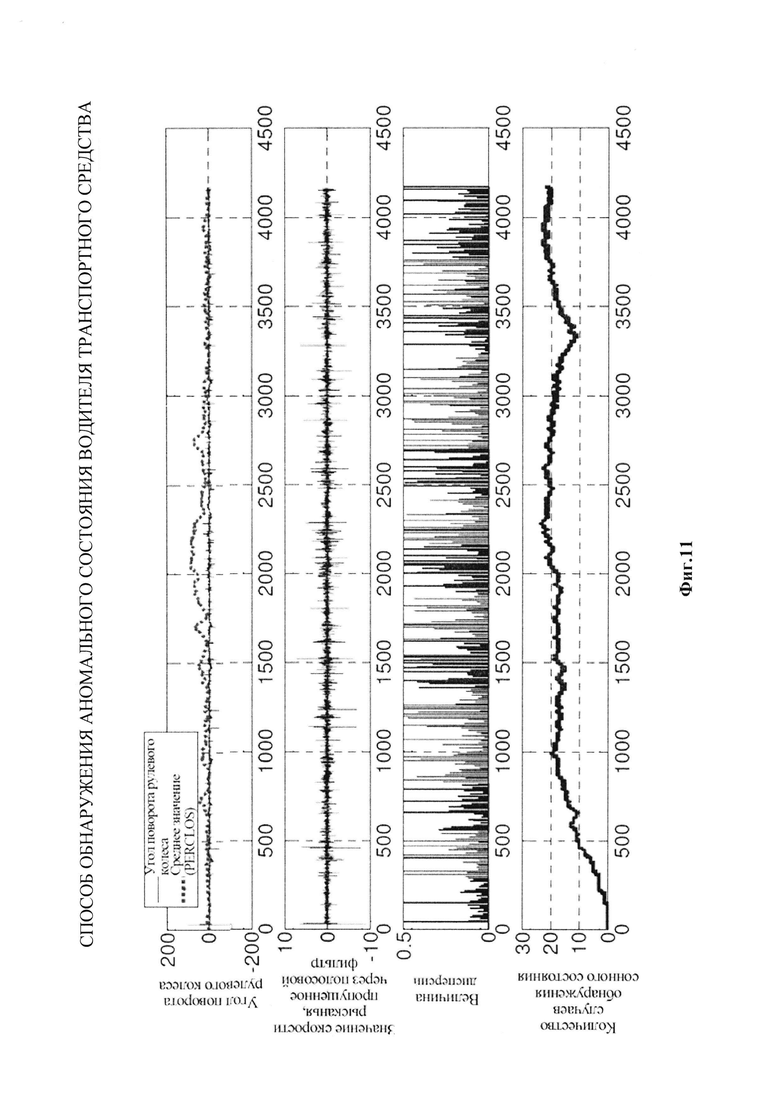
На фиг. 10 представлены данные, полученные с помощью способа с фиг. 7 при бодром состоянии водителя, а на фиг. 11 представлены данные, полученные с помощью способа с фиг. 7 при сонном состоянии водителя.
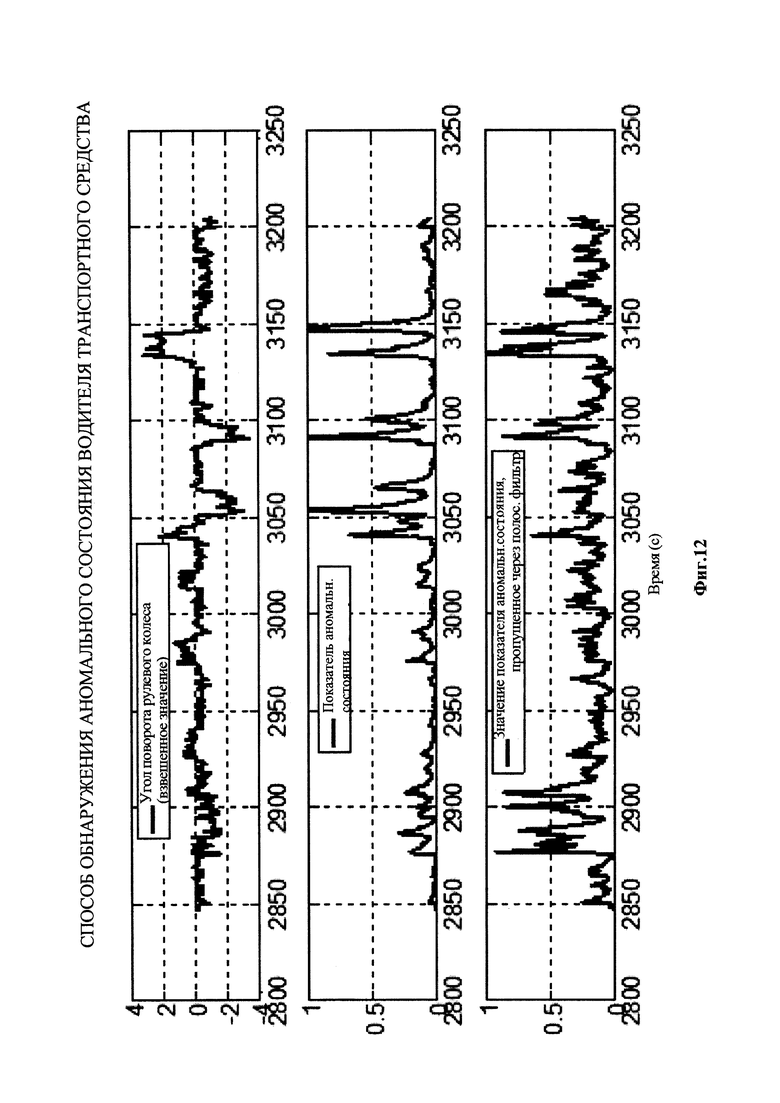
На фиг. 12 представлен пример графика взвешенных данных об угле поворота рулевого колеса, а также первого и второго показателей аномального состояния при фактическом движении по шоссе.
Осуществление изобретения
На фиг. 1 представлена схема системы транспортного средства 101, позволяющая обнаруживать аномальное поведение водителя, которое, например, может свидетельствовать об опасном условии движения, таком как сонливость водителя. Транспортное средство 101 включает в себя вычислительное устройство 105, подключенное к одному или нескольким устройствам 110 сбора данных, например, к датчикам или аналогичным устройствам, обычно используемым для сбора данных 115 об угле поворота рулевого колеса, скорости движения и скорости рысканья транспортного средства 101 и(или) других данных, указанных в настоящем документе. Компьютер 105 также выполнен с возможностью использовать вышеуказанные данные 115, в частности, данные о траектории движения транспортного средства 101, такие как данные 115 об угле поворота рулевого колеса и (или) данные 115 о скорости рысканья, которые обычно используются вместе с данными 115 о скорости движения, для определения вероятности наличия аномального условия движения, например, условия вероятности движения с высокой нагрузкой на водителя, а также утомления или сонливости водителя и т.д.
Механизмы, позволяющие определить аномальное состояние водителя, будут более подробно описаны ниже; в общем случае принцип их работы основывается на собранных данных 115 о траектории движения. Например, в соответствии с одним вариантом применения выполняется сбор данных 115 об угле поворота рулевого колеса, после чего значение угла поворота рулевого колеса транспортного средства 101 преобразуется с помощью весовой функции, зависящей от скорости движения. Для получения первого показателя аномального состояния вычисляется рекурсивная дисперсия взвешенного значения угла поворота рулевого колеса. Также вычисляется второй показатель аномального состояния, соответствующий частотной составляющей управления направлением движения. Взвешенное значение угла поворота рулевого колеса подается на полосовой фильтр, после чего для получения второго показателя аномального состояния вычисляется рекурсивная дисперсия взвешенного значения угла поворота рулевого колеса, пропущенного через полосовой фильтр. Если один или оба показателя аномального состояния превышают заранее заданные пороговые значения, это может свидетельствовать об аномальном условии движения.
Аналогичный подход может быть использован для определения скоростей рысканья транспортного средства 101. Например, данные 115 о скорости рысканья могут быть пропущены через полосовой фильтр, после чего можно определить дисперсию скорости рысканья, пропущенную через полосовой фильтр, и использовать ее для обнаружения возможного аномального поведения, например, возможной сонливости водителя, в том случае, когда значение скорости рысканья, пропущенное через полосовой фильтр, будет превышать заранее заданное пороговое значение.
При обнаружении аномального состояния водителя, например, сонливости водителя компьютером 105 также могут выполняться определенные действия, например, выдача предупреждения или аналогичного сообщения и(или) выполнение некоторого управления транспортным средством 101, например, снижение скорости или остановка транспортного средства 101. Таким образом, сонливость водителя может быть выражена количественно и идентифицирована с помощью датчиков или других устройств 110 сбора данных, обычно уже установленных в транспортном средстве 101, при этом отсутствует необходимость в дополнительной информации о дороге, что в противном случае могло бы потребовать сбора дополнительных данных 115 и (или) установки датчиков 110.
В общем случае транспортное средство 101 представляет собой наземное транспортное средство на двух или более колесах, например, четырехколесный пассажирский автомобиль или его аналог. Центральный компьютер 105, установленный, например, в транспортном средстве 101, имеет процессор и запоминающее устройство, при этом запоминающее устройство включает в себя один или несколько типов машиночитаемых носителей, в т.ч. энергозависимые и энергонезависимые запоминающие устройства, и хранит инструкции, исполняемые процессором, для выполнения различных операций, включая операции, раскрытые в данном описании изобретения. На запоминающем устройстве компьютера 105 также хранятся инструкции, исполняемые процессором компьютера 105, для выполнения способов, раскрытых в настоящем документе, например, для приема и оценки данных 115, полученных от устройств 110 сбора данных, для принятия решений, касающихся сонливости водителя, и т.д.
Компьютер 105, как правило, выполнен с возможностью обмена данными с помощью шины локальной сети контроллеров (CAN) или ее аналога. Кроме того, компьютер 105 может быть выполнен с возможностью обмена данными с одним или несколькими устройствами 150, например, используя различные проводные и (или) беспроводные сетевые протоколы, в том числе, Bluetooth, универсальную последовательную шину (USB) или кабель micro-USB и т.д. Кроме того, компьютер 105 может включать в себя или может быть подключен к человеко-машинному интерфейсу (HMI), т.е. может принимать вводимые команды для компьютера 105 и отображать выходную информацию. Человеко-машинный интерфейс может включать в себя различные механизмы, например, устройство ввода, в т.ч. сенсорный экран, клавиатуру, кнопочную панель, микрофон и т.д., а также устройства вывода, в т.ч. экран дисплея, динамики и т.д.
Устройства ПО сбора данных могут включать в себя различные устройства, в том числе, датчики или аналогичные устройства, использующие, например, гироскопы, которые являются стандартной частью современных транспортных средств 101 и используются для определения данных 115 о скорости рысканья и (или) других данных 115. Кроме того, в качестве устройств 110 сбора данных в транспортном средстве можно использовать различные контроллеры, которые будут передавать данные 115 по CAN-шине, например, данные 115 о скорости, ускорении транспортного средства и т.д. Кроме того, в транспортном средстве могут быть установлены датчики или аналогичные устройства, оборудование системы глобального позиционирования (GPS) и т.д., которые могут выполнять роль устройств 110 сбора данных и обеспечивать передачу данных непосредственно на компьютер 105, например, по проводному или беспроводному каналу связи. Сенсорные устройства 110 сбора данных могут включать в себя механизмы для определения положения, изменение в положении, скорость изменения в положении и т.п.компонентов транспортного средства 101 и т.д., в том числе, рулевого колеса, педали газа, педали тормоза, рычага переключения передач и т.д.
На запоминающем устройстве компьютера 105, как правило, хранятся собранные данные 115. Собранные данные 115 могут представлять собой различные полученные данные о транспортном средстве 101. Помимо данных 115, указанных выше, в качестве примера можно привести данные 115, собранные с помощью одного или нескольких устройств 110 сбора данных, а также данные, вычисленные с их помощью в компьютере 105.
На фиг. 2 представлена блок-схема примера способа 200 обнаружения аномального условия движения, например, обнаружения опасного условия движения. В общем случае для получения полезной информации о возможном опасном условии движения способ 200 может включать в себя определение показателя аномального состояния, пропущенного через полосовой фильтр, на основании рекурсивной дисперсии взвешенных значений угла поворота рулевого колеса, пропущенных через полосовой фильтр.
Способ 200 начинается на этапе 205, на котором компьютер 105 транспортного средства 101 собирает данные 115, включая значения угла поворота рулевого колеса транспортного средства 101 за определенный период времени, например, за последние 10 секунд, за последние 20 секунд, за последние 30 секунд и т.д.
Затем на этапе 210 компьютер 105 вычисляет весовую функцию, зависящую от скорости движения, пример которой описан в приведенном ниже уравнении 1, для определения весового значения G (также известного как коэффициент усиления по скорости рысканья), которое может быть применено для обработки данных 115 об угле поворота рулевого колеса. В уравнении 1 приняты следующие обозначения: L -колесная база транспортного средства 101, Кнедост.повор. - коэффициент недостаточной поворачиваемости, a ν - продольная скорость транспортного средства 101.

В общем случае коэффициент G усиления по скорости рысканья увеличивается вместе со скоростью транспортного средства 101. Например, на фиг. 3 представлен пример графика, на котором значение коэффициента усиления по скорости рысканья изменяется линейно вместе с продольной скоростью транспортного средства 101 при нейтральной поворачиваемости транспортного средства (Кнедост.повор=0), отклоняясь в соответствии со значением коэффициента недостаточной поворачиваемости.
На этапе 215 весовая функция, полученная на этапе 210, используется, например, в качестве множителя, для преобразования значений данных об угле поворота рулевого колеса, собранных на этапе 205. Использование весовой функции G для преобразования значений угла поворота рулевого колеса позволяет достичь более точного разделения и классификации состояний.
На этапе 220, выполняемом после этапа 215, производится рекурсивное вычисление дисперсии взвешенного значения угла поворота рулевого колеса, например, при помощи уравнений 2а, 2b и 2с:

В указанных выше уравнениях 2 приняты следующие обозначения: х - управляющее действие, выполняемое водителем, например, взвешенное значение угла поворота рулевого колеса, 
На фиг. 4 представлены графики значений, полученных во время тестового заезда транспортного средства 101. На верхнем графике приведены необработанные и взвешенные значения данных 115 об угле поворота рулевого колеса; на среднем графике приведены значения данных 115 о скорости транспортного средства 101, а на нижнем графике приведены соответствующие расчетные значения показателя аномального состояния. Было определено, что в общем случае значение показателя аномального состояния, полученное на основании величины дисперсии взвешенных значений угла поворота рулевого колеса, позволяет получить более полную и полезную информацию, чем другие значения, особенно при высоких скоростях. Таким образом, различные действия и (или) события могут быть сопоставлены с соответствующими значениями. Например, для смены полосы могут быть установлены значения показателя равные около 0,2-0,4. Другим маневрам, например, движению по криволинейным участкам дороги, движению по центру полосы и т.д., могут быть присвоены другие значения.
Величины дисперсий Var, полученные на этапе 220, относятся к первому показателю аномального состояния, который может быть вычислен в рамках выполнения способа 200. Первый показатель аномального состояния позволяет обнаружить аномальные условия движения, связанные с высокой нагрузкой на водителя, например, поворотом, сменой полосы, движением по криволинейным участкам дороги и т.д., т.е. ситуаций, в которых необходимо изменять направление движения на большую величину.
На этапе 225 взвешенные данные об угле поворота рулевого колеса, вычисленном на этапе 215, пропускаются через полосовой фильтр, пример которого описан ниже с помощью уравнений 3а и 3b. Использование полосового фильтра является особенно эффективным благодаря тому, что при выполнении различных маневров, например, при поворотах, управлении боковым движением транспортного средства 101, помимо низкочастотных составляющих управления, также присутствуют высокочастотные составляющие управления направлением движения, в частности, исправление ошибок и подавление помех. Специальный полосовой фильтр, пример которого описан в уравнениях 3а и 3b, предназначен для исключения стандартных и предпочтительных моделей поведения из взвешенного значения угла поворота рулевого колеса.

Данный полосовой фильтр представляет собой каскадную комбинацию, состоящую из фильтра нижних частот (уравнение 3а), в котором используются входные значения дисперсии угла поворота рулевого колеса (xi), с временной константой (αнч), и фильтра верхних частот (уравнение 3b), в котором используется временная константа (αвч), при этом в качестве входного значения для фильтра верхних частот используется выходное значение фильтра нижних частот (yi), хотя в соответствии с предпочтительным вариантом данное входное значение следует модифицировать. В частности, вместо использования текущего входного значения yi может быть использовано входное значение yi-n с n-этапной задержкой. Значения переменных, используемые в уравнениях 3, могут быть определены эмпирическим путем. Использование полосового фильтра позволяет получить набор данных  об угле поворота рулевого колеса, пропущенных через полосовой фильтр.
об угле поворота рулевого колеса, пропущенных через полосовой фильтр.
На фиг. 5 представлен график значений временных характеристик для стандартных усилий, прилагаемых к рулевому управлению. На фиг. 6 представлен график частотных характеристик. (В данном случае аббревиатура «ФВЧ» расшифровывается как «фильтр верхних частот»). На графиках с фиг. 5 показано, что модифицированный фильтр верхних частот с n-этапной задержкой реагирует на переходы входного сигнала (yi-n) вместо того, чтобы выдавать сигнал, соответствующий стандартному фильтру верхних частот. На фиг. 6 видно, что на участке после достижения предельного значения модифицированный фильтр верхних частот имеет более крутой фронт.
На этапе 227 выполняется рекурсивное вычисление величин дисперсий, пропущенных через полосовой фильтр, например, применены уравнения 2, используя выходные сигналы полосового фильтра в качестве входного сигнала х управления от водителя для уравнений 2. Соответственно, после этого можно получить дополнительный или альтернативный второй показатель аномального состояния.
На фиг. 12 представлен пример графика взвешенных данных об угле поворота рулевого колеса, а также первый (не пропущенный через полосовой фильтр) и второй (пропущенный через полосовой фильтр) показатели аномального состояния, которые были получены во время тестового заезда по шоссе. Видно, что данные, пропущенные через полосовой фильтр, более чувствительны, в связи с чем их можно использовать для обнаружения событий, во время которых изменения угла поворота рулевого колеса могут быть не очень значительными, например, при смене полосы на высокой скорости или при аналогичном событии, по сравнению с событиями, обнаруживаемыми с помощью показателя аномального состояния, не пропущенного через полосовой фильтр, например, при поворотах на низкой скорости. В частности, на видеозаписи тестового заезда, на основании которой были построены графики с фиг. 12, видно, что на управление целевым транспортным средством сильно влияют проблемы с движением в соседней полосе в течение периода с 2875 секунды по 2925 секунду. Подобное изменение в поведении не может быть обнаружено с помощью первого показателя аномального состояния, но явно проявляется при использовании второго показателя аномального состояния, пропущенного через полосовой фильтр.
На этапе 230, выполняемом после этапа 227, компьютер 105 определяет, превышает ли значение первого показателя аномального состояния (описанного со ссылкой на этап 220) и (или) значение второго показателя аномального состояния (описанного со ссылкой на этап 225, например, одно или несколько значений дисперсий  угла поворота рулевого колеса, пропущенных через полосовой фильтр), заранее заданное пороговое значение показателя аномального состояния. Заранее заданное пороговое значение для показателя аномального состояния, не пропущенного через полосовой фильтр, или показателя аномального состояния, пропущенного через полосовой фильтр, обычно определяется путем эмпирических проверок и калибровки, соответствующей аномальной ситуации движения, например, условия движения, связанного с высокой нагрузкой на водителя, обнаружению сонливости, отравления и т.д. Если значения одного или обоих показателей становятся больше заранее заданного порогового значения, следующим выполняется этап 235. В противном случае способ 200 переходит на этап 740.
угла поворота рулевого колеса, пропущенных через полосовой фильтр), заранее заданное пороговое значение показателя аномального состояния. Заранее заданное пороговое значение для показателя аномального состояния, не пропущенного через полосовой фильтр, или показателя аномального состояния, пропущенного через полосовой фильтр, обычно определяется путем эмпирических проверок и калибровки, соответствующей аномальной ситуации движения, например, условия движения, связанного с высокой нагрузкой на водителя, обнаружению сонливости, отравления и т.д. Если значения одного или обоих показателей становятся больше заранее заданного порогового значения, следующим выполняется этап 235. В противном случае способ 200 переходит на этап 740.
На этапе 235, выполняемом после этапа 230, компьютер 105 обнаруживает аномальное условие движения, например, условие, связанное с высокой нагрузкой на водителя, или сонливость водителя, и выполняет соответствующее действие. В соответствии с одним примером компьютер 105 может выдавать одно или несколько предупреждений с помощью человеко-машинного интерфейса, например, звуковое предупреждение в виде некоторого сигнала или сообщения для водителя транспортного средства 101, визуальное предупреждение, отображаемое на экране человеко-машинного интерфейса, и т.д. Кроме того, компьютер 105 может быть выполнен с возможностью отправлять инструкции на один или несколько контроллеров транспортного средства 101, с помощью которых можно будет изменить скорость движения транспортного средства 101, направление движения транспортного средства 101 для безопасного выполнения остановки и т.д. После этапа 235 способ 200 переходит на этап 240.
На этапе 240, который может выполняться после этапа 230 или 235, компьютер 105 определяет, нужно ли продолжить выполнение способа 200. Например, транспортное средство 101 может быть выключено, остановлено или двигаться со скоростью, недостаточной для нормального сбора данных 115 об угле поворота рулевого колеса. В этом случае после этапа 240 способ 200 может быть завершен. Однако при переходе на этап 205 выполнение способа 200 может быть продолжено.
Следует отметить, что механизмы, описанные в настоящем документе, могут быть использованы для обнаружения аномальных условий движения, например, сонливости, болезненного состояния, наркотического или алкогольного опьянения и т.д. Однако для состояний, отличных от сонливости, значения переменных могут быть другими.
Кроме того, способ 200 можно модифицировать таким образом, чтобы вместо данных 115 об угле поворота рулевого колеса можно было использовать данные 115 о скорости рысканья. Например, было определено, что для сонливости водителя свойственны специфические значения частотных составляющих. Сонливость может быть обнаружена на основании оценочных значений спектральной плотности мощности (PSD). Оценочные значения спектральной плотности мощности наглядно иллюстрируют влияние сонливости на данные 115 о скорости рысканья. В частности, на фиг. 8 представлен пример графика оценочных значений спектральной плотности мощности для дисперсий скорости рысканья при бодром (не сонливом) состоянии водителя, а на фиг. 9 представлен пример графика оценочных значений спектральной плотности мощности для дисперсий скорости рысканья при сонливом состоянии водителя относительно идеальных значений, полученных с помощью эталонной модели. Значительные частотные составляющие, соответствующие сонливости водителя, могут быть примерно равны 0,5 Гц.
На фиг. 7 представлена блок-схема альтернативного или дополнительного примера способа 700 обнаружения аномального условия движения, например, обнаружения сонливого условия движения (сонливости водителя). При этом сбор данных о скорости рысканья на этапе 705 способа 700 аналогичен сбору данных 115 на этапе 205. На этапах 710 и 715 весовая функция, зависящая от скорости движения, может быть вычислена и использована, как было описано выше со ссылкой на этапы 210 и 215, а величины дисперсий скорости рысканья, пропущенных через полосовой фильтр, могут быть рассчитаны на этапах 725 и 777, как было описано выше со ссылкой на этапы 215, 225 и 227. Следует отметить, что способ 700 не включает в себя этап, аналогичный этапу 220; в способе 700 вычисляется только один показатель аномального состояния.
На этапе 730, выполняемом после этапа 725, происходит определение того, превышает ли величина дисперсии скорости рыканья, пропущенной через полосовой фильтр, заранее заданное пороговое значение, что является одним из признаков возможного сонного состояния. Заранее заданное пороговое значение определяется путем эмпирических проверок и калибровки в зависимости от платформы транспортного средства. Если величина дисперсии превышает заранее заданное пороговое значение, то следующим выполняется этап 740. В противном случае способ 700 переходит на этап 755.
На этапе 740, выполняемом после этапа 735, компьютер 105 увеличивает значение (целочисленное) счетчика, которое изначально было установлено (или сброшено) в ноль и которое используется для определения количества превышений порогового значения величины дисперсии после сброса или установки счетчика в ноль. Например, в соответствии с представленным вариантом применения счетчик регистрирует количество временных периодов t, когда было превышено пороговое значение величины дисперсии. Сброс счетчика выполняется по истечении заранее заданного периода времени, который в соответствии с одним вариантом применения составляет шесть минут.
На этапе 745, выполняемом после этапа 740, компьютер 105 определяет, стало ли значение счетчика, увеличенное на этапе 740, больше заранее заданного порогового значения. Как и описанное выше заранее заданное пороговое значение показателя, используемое на этапе 730, пороговое значение счетчика, используемое на этапе 740, может быть получено на основании эмпирических проверок и калибровки в зависимости от платформы транспортного средства. При превышении порогового значения счетчика следующим выполняется этап 750. В противном случае способ 700 переходит на этап 755.
На этапе 750, выполняемом после этапа 745, компьютер 105 идентифицирует опасное условие движения, например, условие сонливости водителя, и выполняет соответствующее действие. В соответствии с одним примером компьютер 105 может выдавать одно или несколько предупреждений с помощью человеко-машинного интерфейса, например, звуковое предупреждение в виде некоторого сигнала или сообщения для водителя транспортного средства 101, визуальное предупреждение, отображаемое на экране человеко-машинного интерфейса, и т.д. Кроме того, компьютер 105 может быть выполнен с возможностью отправлять инструкции на один или несколько контроллеров транспортного средства 101, с помощью которых можно будет изменить скорость движения транспортного средства 101, направление движения транспортного средства 101 для безопасного выполнения остановки и т.д. После этапа 755 способ 700 переходит на этап 755.
На этапе 755, который может выполняться после этапа 730, 745 или 750, компьютер 105 определяет, нужно ли продолжить выполнение способа 700. Например, транспортное средство 101 может быть выключено, остановлено или двигаться со скоростью, недостаточной для нормального сбора данных о скорости рысканья рулевого колеса. В этом случае после этапа 755 способ 700 может быть завершен. Однако при переходе на этап 705 выполнение способа 700 может быть продолжено. Затем на этапе 755 значение счетчика, рассмотренного со ссылкой на этап 740, может быть сброшено или изменено, например, по истечении определенного периода времени, как было описано выше.
На фиг. 10 представлены данные, полученные с помощью способа 700 при бодром состоянии водителя. На фиг. 11 представлены данные, полученные с помощью способа 700 при сонливом состоянии водителя. Изменения с фиг. 11 имеют большую величину, что приводит к росту значения счетчика случаев обнаружения возможного сонного состояния.
В общем случае вычислительные устройства, аналогичные тем, что были рассмотрены в настоящем описании, могут содержать инструкции, выполняемые одним или несколькими вычислительными устройствами, аналогичными тем, что были рассмотрены в настоящем описании, для осуществления этапов или операций вышеуказанных способов. Например, рассмотренные выше этапы процесса могут быть реализованы в виде машиночитаемых инструкций.
Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и (или) технологий программирования, включая, но не ограничиваясь этим, языки Java™, С, С++, Visual Basic, Java Script, Perl, HTML и т.д. или их комбинации. В общем случае процессор (например, микропроцессор) принимает инструкции, например, от запоминающего устройства, машиночитаемого носителя и т.д., и выполняет эти инструкции, тем самым, реализуя один или несколько процессов, включая один или несколько процессов, приведенных в настоящем описании. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей. Файл в вычислительном устройстве обычно представляет собой набор данных, хранящихся на машиночитаемом носителе, например, на носителе данных или в оперативном запоминающем устройстве, и т.д.
Машиночитаемый носитель может представлять собой любой носитель, предоставляющий данные (например, инструкции), которые могут быть обработаны компьютером. Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные запоминающие устройства, оперативные запоминающие устройства и т.д. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которое обычно является частью основного запоминающего устройства. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
На чертежах одинаковые элементы обозначены одинаковыми ссылочными позициями. Также некоторые или все элементы могут быть изменены. Что касается описанных в данном документе носителей, процессов, систем, способов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, такие процессы могут быть выполнены с использованием другой последовательности данных этапов. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а некоторые этапы могут быть добавлены или исключены. Другими словами, описания процессов представлены лишь в качестве примера вариантов воплощения изобретения и не могут рассматриваться как ограничение формулы изобретения.
Таким образом, следует понимать, что описание приведено выше в целях наглядности, а не ограничения. Многие варианты осуществления и способы применения, отличные от указанных примеров, станут очевидными при ознакомлении с вышеприведенным описанием. Объем не должен быть определен на основании приведенного выше описания, но, напротив, должен быть определен на основании прилагаемой формулы изобретения наряду с полным объемом эквивалентов, для которых данная формула является основанием. Можно предположить и ожидать будущего развития технологий, упомянутых в данном описании изобретения, а также того, что раскрытые системы и способы будут включены в подобные будущие варианты осуществления изобретения. Таким образом, следует понимать, что применение изобретения может быть изменено и скорректировано и что оно ограничивается только формулой изобретения.
Все термины, применяемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в области техники, если иное явно не указано в описании изобретения. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ ОПАСНОГО ВОЖДЕНИЯ И КОМПЬЮТЕР ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2679299C2 |
| СИСТЕМА И СПОСОБ КАЛИБРОВКИ СИСТЕМЫ ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2015 |
|
RU2584372C1 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ ФАКТИЧЕСКОГО УГЛА СЦЕПКИ МЕЖДУ ТРАНСПОРТНЫМ СРЕДСТВОМ И ПРИЦЕПОМ | 2015 |
|
RU2600178C2 |
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2570191C2 |
| УЛУЧШЕННОЕ ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ | 2015 |
|
RU2708534C2 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2608786C2 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2575663C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЧУВСТВИТЕЛЬНОЙ К СТИЛЮ ВОЖДЕНИЯ ПОДСИСТЕМОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2398694C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ПРИБЛИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2687395C2 |
| УСОВЕРШЕНСТВОВАННОЕ ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДОРОГИ ДЛЯ АДАПТИВНОГО РЕЖИМА ВОЖДЕНИЯ | 2016 |
|
RU2707483C2 |
Изобретение относится к системам управления транспортным средством. Система обнаружения аномальных состояний водителя включает в себя компьютер в транспортном средстве. Компьютер содержит процессор и запоминающее устройство, компьютер выполнен с возможностью собирать данные о траектории транспортного средства, определять текущую дисперсию данных о траектории, вычислять зависящую от скорости весовую функцию для получения зависящего от скорости весового значения, определять показатель аномального состояния и выдавать команду контроллеру в транспортном средстве для выполнения действия на основании показателя аномального состояния. Определение текущей дисперсии данных о траектории производится посредством использования предварительного определения дисперсии данных о траектории. Определение показателя аномального состояния производится частично на основании применения зависящего от скорости весового значения для определенной текущей дисперсии. Достигается повышение безопасности управления транспортным средством. 3 н. и 15 з.п. ф-лы, 12 ил.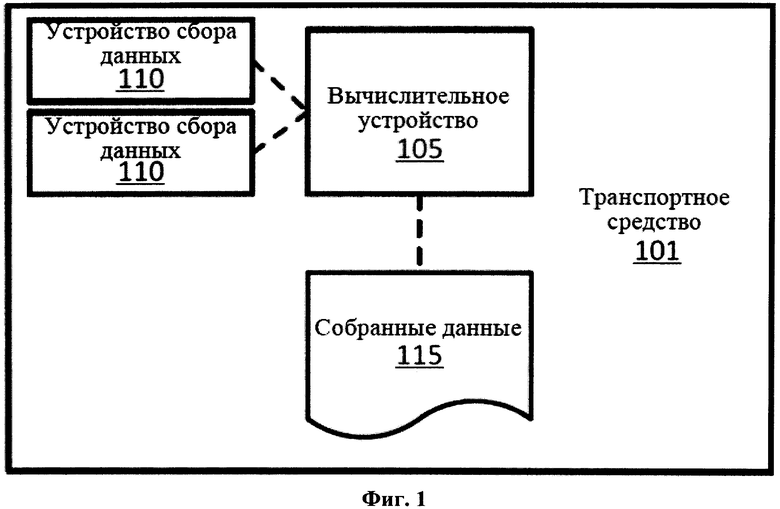
1. Система транспортного средства для обнаружения аномальных состояний водителя, которая включает в себя компьютер в транспортном средстве, причем компьютер содержит процессор и запоминающее устройство, при этом компьютер выполнен с возможностью:
собирать данные о траектории транспортного средства;
определять текущую дисперсию данных о траектории посредством использования предварительного определения дисперсии данных о траектории;
вычислять зависящую от скорости весовую функцию для получения зависящего от скорости весового значения;
определять показатель аномального состояния по меньшей мере частично на основании применения зависящего от скорости весового значения для определенной текущей дисперсии; и
выдавать команду контроллеру в транспортном средстве для выполнения действия на основании показателя аномального состояния.
2. Система по п. 1, в которой данные о траектории транспортного средства представляют собой по меньшей мере одни из данных о скорости рысканья и данных об угле поворота рулевого колеса.
3. Система по п. 1, в которой компьютер дополнительно выполнен с возможностью использовать показатель аномального состояния для определения аномального условия движения.
4. Система по п. 3, в которой компьютер дополнительно выполнен с возможностью подсчитывать количество случаев, когда показатель аномального состояния превышает заранее заданное пороговое значение при определении аномального условия движения.
5. Система по п. 3, в которой аномальное условие движения представляет собой высокую нагрузку на водителя, сонливость или ухудшенное состояние водителя.
6. Система по п. 1, в которой компьютер дополнительно выполнен с возможностью применения полосового фильтра для получения показателя аномального состояния.
7. Система по п. 6, в которой полосовой фильтр включает в себя ступенчатую задержку.
8. Способ обнаружения аномальных состояний водителя, в котором:
собирают данные о траектории транспортного средства;
определяют текущую дисперсию данных о траектории посредством использования предварительного определения дисперсии данных о траектории;
вычисляют зависящую от скорости весовую функцию для получения зависящего от скорости весового значения;
определяют показатель аномального состояния по меньшей мере частично на основании применения зависящего от скорости весового значения для определенной текущей дисперсии; и
выдают команду контроллеру транспортного средства для выполнения действия на основании показателя аномального состояния.
9. Способ по п. 8, в котором данные о траектории транспортного средства представляют собой по меньшей мере одни из данных о скорости рысканья и данных об угле поворота рулевого колеса.
10. Способ по п. 8, в котором дополнительно используют показатель аномального состояния для определения аномального условия движения.
11. Способ по п. 10, в котором дополнительно подсчитывают количество случаев, когда показатель аномального состояния превышает заранее заданное пороговое значение при определении аномального условия движения.
12. Способ по п. 10, в котором аномальное условие движения представляет собой высокую нагрузку на водителя, сонливость или ухудшенное состояние водителя.
13. Способ по п. 8, в котором дополнительно применяют полосовой фильтр для получения показателя аномального состояния.
14. Способ по п. 13, в котором полосовой фильтр включает в себя ступенчатую задержку.
15. Компьютер транспортного средства, выполняющий инструкции, сохраненные на невременном считываемом компьютером носителе, причем упомянутые инструкции включают в себя инструкции для:
сбора данных о траектории транспортного средства;
определения текущей дисперсии данных о траектории посредством использования предварительного определения дисперсии данных о траектории;
вычисления зависящей от скорости весовой функции для получения зависящего от скорости весового значения;
определения показателя аномального состояния по меньшей мере частично на основании применения зависящего от скорости весового значения для определенной текущей дисперсии; и
выдачи команды контроллеру транспортного средства для выполнения действия на основании показателя аномального состояния.
16. Компьютер по п. 15, в котором данные о траектории транспортного средства представляют собой по меньшей мере одни из данных о скорости рысканья и данных об угле поворота рулевого колеса.
17. Компьютер по п. 15, в котором упомянутые инструкции дополнительно содержат инструкции для использования показателя аномального состояния для определения аномального условия движения.
18. Компьютер по п. 15, причем упомянутый компьютер дополнительно выполнен с возможностью применения полосового фильтра, который включает в себя ступенчатую задержку, для получения показателя аномального состояния.
| МОНОКЛОНАЛЬНОЕ АНТИТЕЛО, РЕАГИРУЮЩЕЕ С ПОВЕРХНОСТНЫМ АГЕНТОМ СТРОМАЛЬНЫХ КЛЕТОК И ПРОДУЦИРУЮЩАЯ ЕГО ГИБРИДОМА | 1994 |
|
RU2160313C2 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ВОДИТЕЛЯ | 2010 |
|
RU2435681C1 |

