Область техники, к которой относится изобретение
Настоящее изобретение относится к системам помощи водителю и системам активной безопасности для транспортных средств, в частности, к системе помощи при движении задним ходом с прицепом, использующей активное торможение прицепа для обеспечения более точного направления прицепа.
Уровень техники
Для многих водителей движение задним ходом транспортного средства с прицепом является очень сложной задачей, особенно для водителей, которые редко ездят с прицепом или ездят с прицепами различных типов. Одной из причин, по которой возникают такие сложности, может быть то, что при движении задним ходом транспортного средства с прицепом необходимо поворачивать руль в сторону, противоположную направлению поворота руля при движении задним ходом транспортного средства без прицепа. Другой причиной возникновения трудностей может быть то, что небольшие ошибки рулевого управления транспортным средством при движении задним ходом с присоединенным прицепом усиливаются, что может привести к быстрому отклонению прицепа от желаемой траектории. Еще одной дополнительной причиной, доказывающей сложность движения задним ходом с прицепом, является необходимость управлять транспортным средством так, чтобы избегать возникновения условий складывания. Эти трудности также могут возникать и, в некоторых случаях, усугубляться при попытке быстро получить крутой радиус поворота, или при смене различных прицепов, которые совершенно по-разному реагируют на одинаковые команды рулевого управления, в частности, относительно короткий прицеп реагирует на изменение угла поворота рулевого колеса гораздо быстрее, чем более длинный прицеп.
Раскрытие изобретения
В соответствии с одним аспектом настоящего изобретения предложена система помощи при движении задним ходом с прицепом для транспортного средства, которая предусматривает использование прицепа, оборудованного тормозной системой. Система помощи при движении задним ходом с прицепом также включает в себя устройство ввода рулевых команд, которое обеспечивает желаемую кривизну траектории прицепа. Для направления прицепа по желаемой кривой и уменьшения проходимого назад расстояния, необходимого для достижения желаемой кривизны, контроллер системы генерирует команду рулевого управления для транспортного средства и команду активации для тормозной системы.
В соответствии с другим аспектом настоящего изобретения предложен способ движения задним ходом с прицепом, имеющим тормозную систему, предусматривающий этап получения желаемой кривизны траектории прицепа, а также этап измерения угла сцепки между прицепом и транспортным средством. Кроме того, способ предусматривает этап генерирования команды рулевого управления для транспортного средства, чтобы на основании угла сцепки направить прицеп по траектории с желаемой кривой. Способ также предусматривает этап генерирования команды активации для тормозной системы, чтобы уменьшить проходимое назад расстояние, необходимое для достижения желаемой кривизны.
В соответствии с еще одним аспектом настоящего изобретения предложена система помощи при движении транспортного средства задним ходом с присоединенным прицепом. Прицеп, используемый вместе с системой помощи при движении задним ходом, оборудован тормозной системой. Система помощи при движении задним ходом с прицепом также включает в себя датчик, измеряющий угол сцепки между транспортным средством и прицепом. Кроме того, система помощи при движении задним ходом с прицепом включает в себя устройства ввода рулевых команд, которое обеспечивает желаемую кривизну траектории прицепа. Система помощи при движении задним ходом с прицепом также включает в себя контроллер, генерирующий команду рулевого управления на основании угла сцепки для направления прицепа по желаемой кривой и команду активации тормозной системы для уменьшения проходимого назад расстояния, необходимого для достижения желаемой кривизны.
Эти и другие аспекты, цели и отличительные особенности настоящего изобретения станут понятны специалистам в данной области техники после ознакомления со следующим описанием, формулой изобретения и сопроводительными чертежами.
Краткое описание чертежей
На данных чертежах представлено следующее.
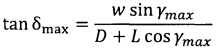
На Фиг. 1 представлен общий вид сверху транспортного средства с присоединенным прицепом, который в соответствии с одним вариантом осуществления оборудован датчиком угла сцепки для обеспечения работы системы помощи при движении задним ходом с прицепом.
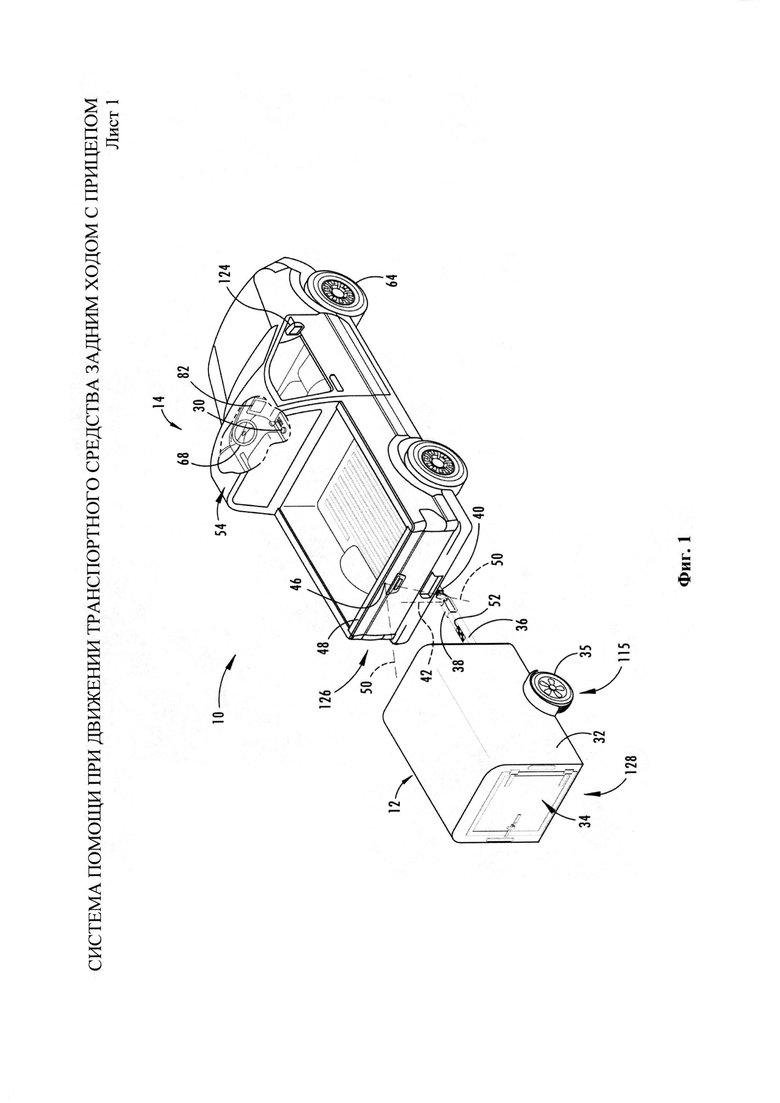
На Фиг. 2 представлено схематическое изображение одного варианта выполнения системы помощи при движении задним ходом с прицепом, которая включает в себя устройство ввода рулевых команд, контроллер кривизны и тормозную систему прицепа.
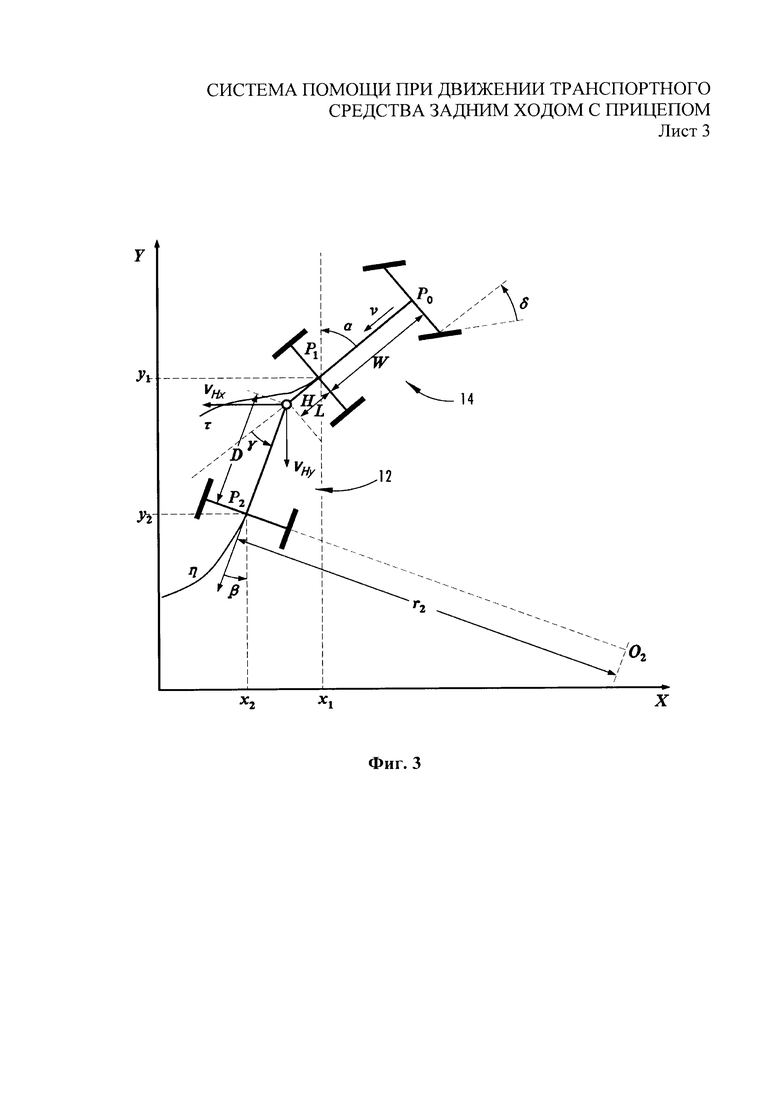
На Фиг. 3 представлено схематическое изображение, на котором указаны геометрические параметры транспортного средства и прицепа в двумерной системе координат x-y, соответствующие значениям переменных, которые используются для определения кинематического соотношения между транспортным средством и прицепом для системы помощи при движении задним ходом в соответствии с одним вариантом осуществления.
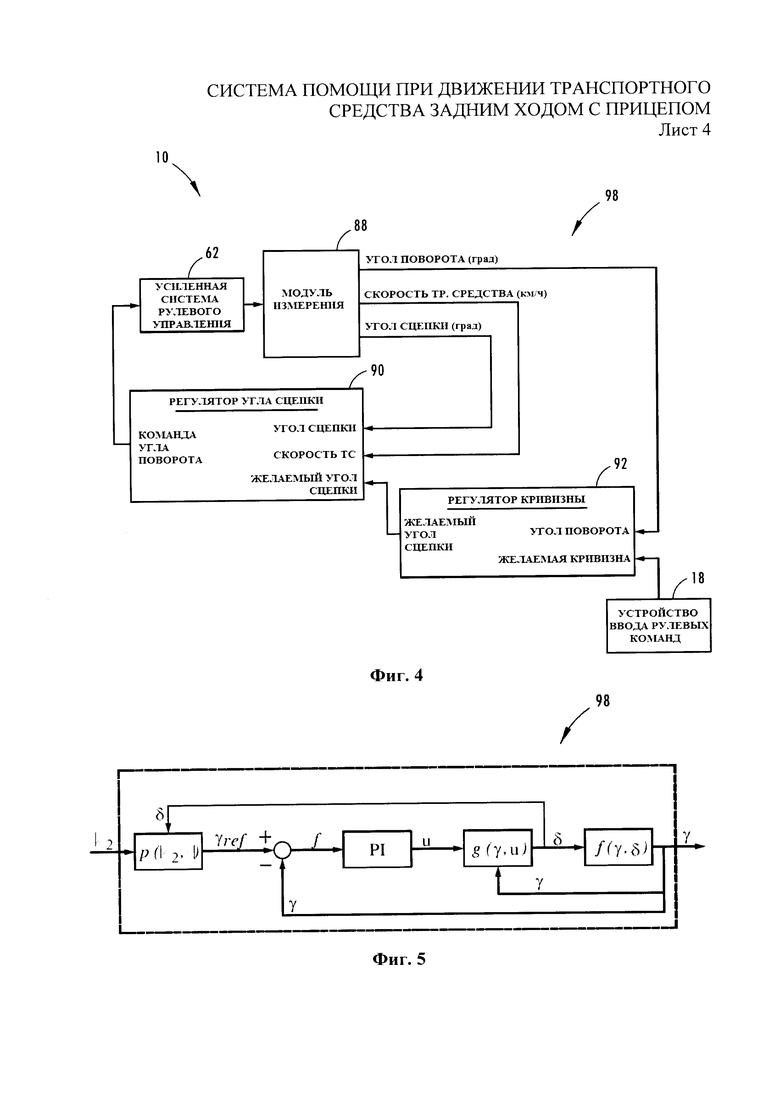
На Фиг. 4 представлено схематическое изображение, на котором представлены элементы контроллера кривизны, в соответствии с другим вариантом осуществления, и другие компоненты системы помощи при движении задним ходом с прицепом в соответствии с данным вариантом осуществления.
На Фиг. 5 представлена принципиальная схема работы контроллера кривизны с Фиг. 4, где изображена архитектура системы обратной связи и канал передачи сигналов контроллера кривизны, в соответствии с данным вариантом осуществления изобретения.
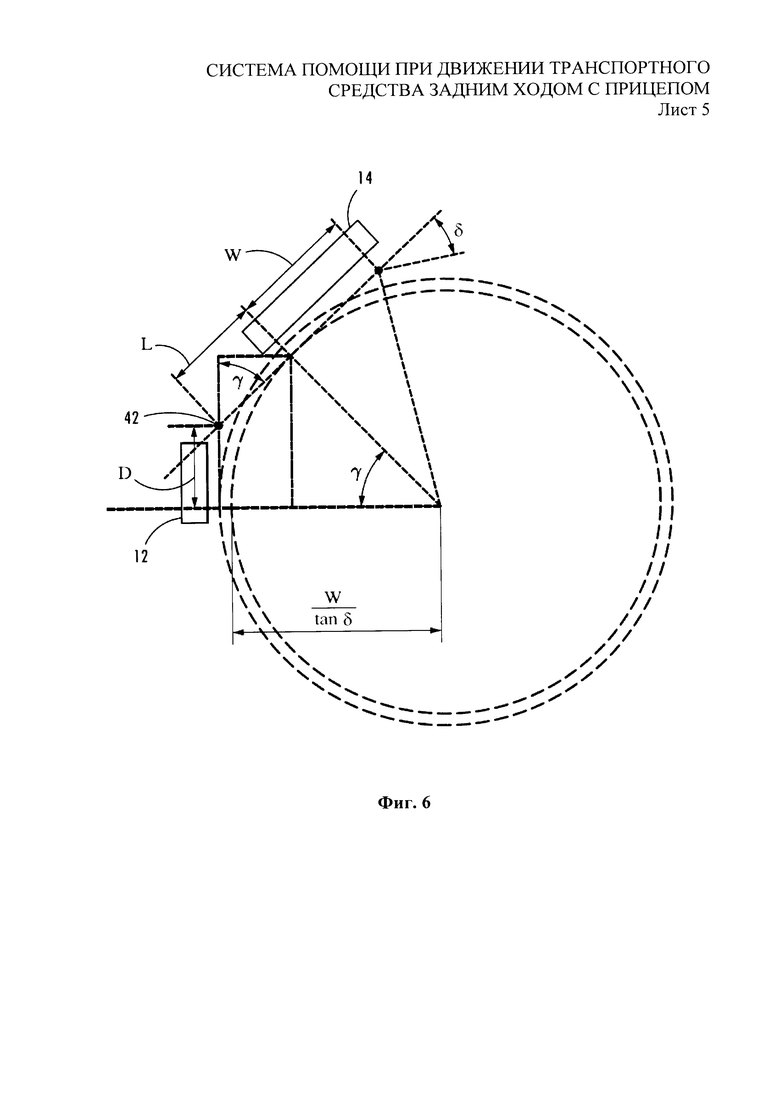
На Фиг. 6 представлена схематическая диаграмма, на которой показано соотношение между углом сцепки и углом поворота управляемых колес транспортного средства, как оно соотносится с кривизной траектории прицепа и углом складывания.
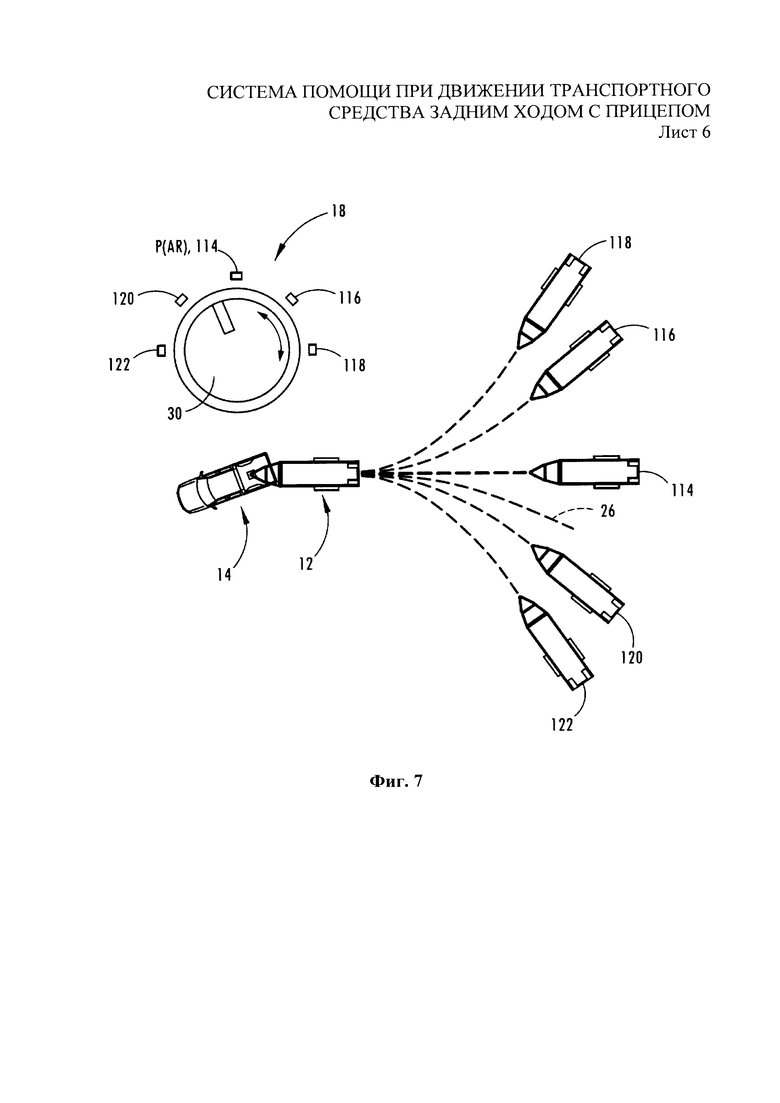
На Фиг. 7 представлены вид в плане одного варианта осуществления поворотной ручки для выбора желаемой кривизны траектории прицепа и соответствующая схема, на которой изображены транспортное средство с прицепом и траектории движения прицепа с различной кривизной, коррелирующие с теми значениями кривизны, которые могут быть выбраны.
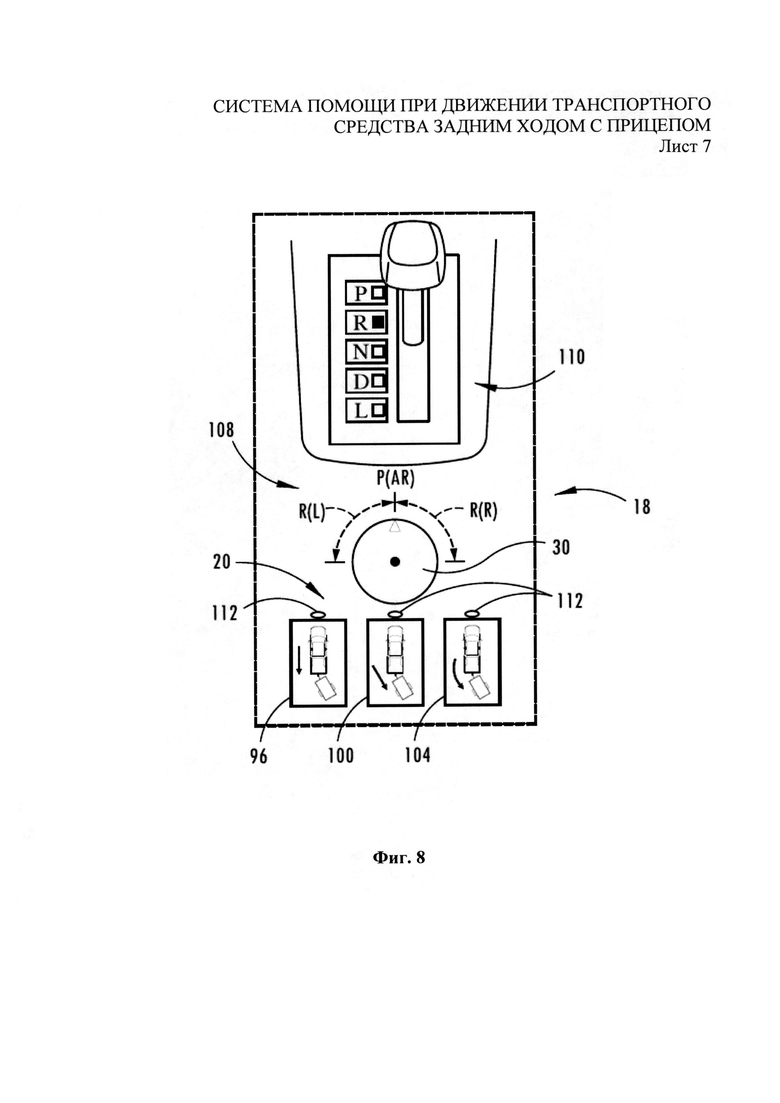
На Фиг. 8 представлен вид в плане устройства ввода рулевых команд, имеющего поворотную ручку и устройство выбора режима работы, которое предназначено для управления работой системы помощи при движении задним ходом с прицепом, в соответствии с одним вариантом осуществления изобретения.
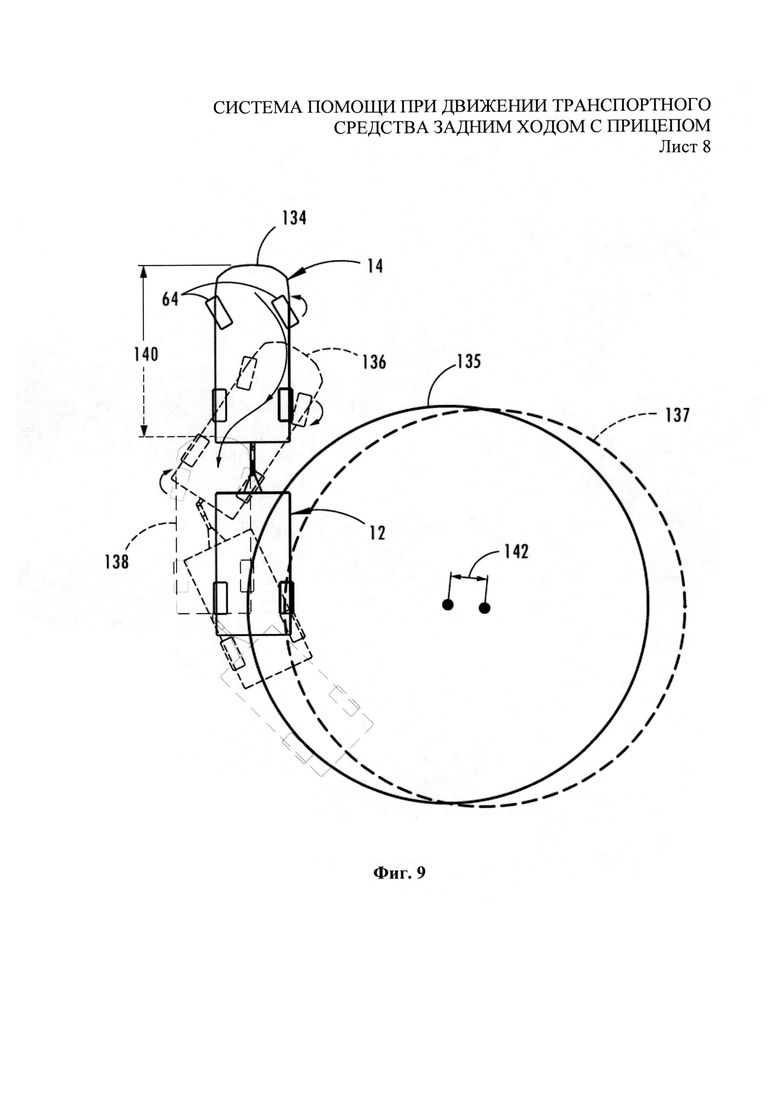
На Фиг. 9 представлена схематическая диаграмма, на которой изображено транспортное средство, управляемое с помощью команды рулевого управления, чтобы направить прицеп по желаемой кривой, в соответствии с одним вариантом осуществления изобретения.
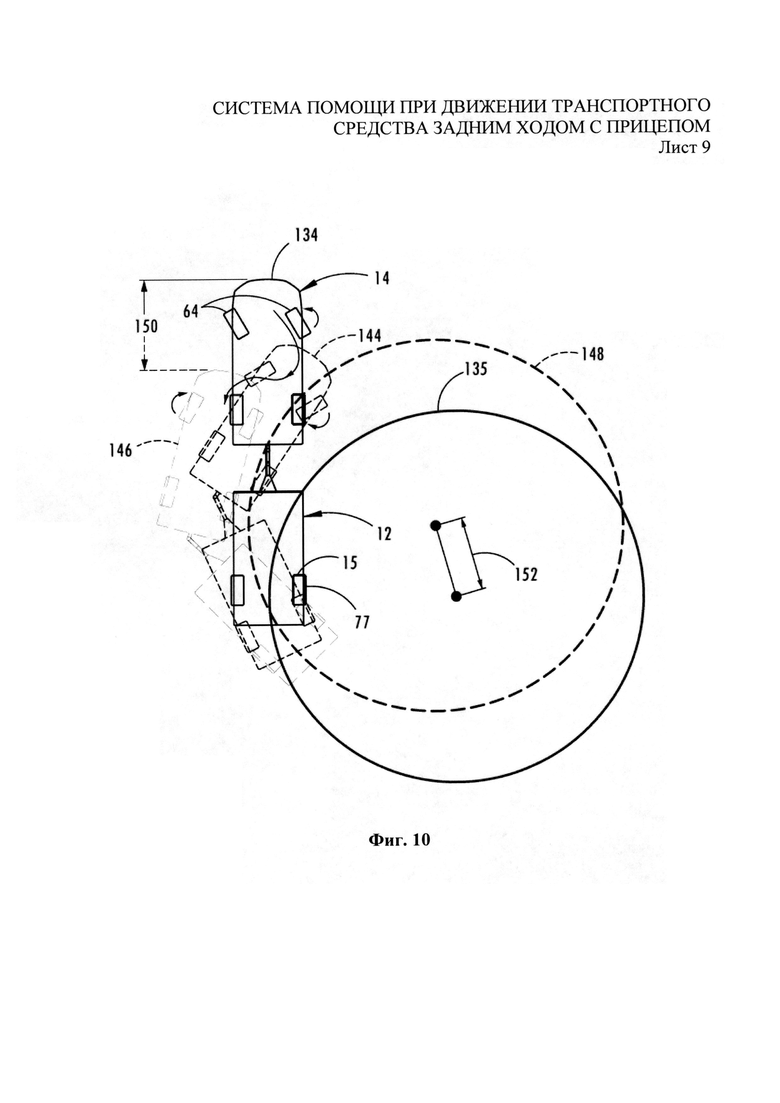
На Фиг. 10 представлена схематическая диаграмма, на которой изображены транспортное средство, управляемое с помощью команды рулевого управления, и прицеп, тормоза которого управляются с помощью команды активации, чтобы направить прицеп по желаемой кривой, в соответствии с одним вариантом осуществления изобретения.
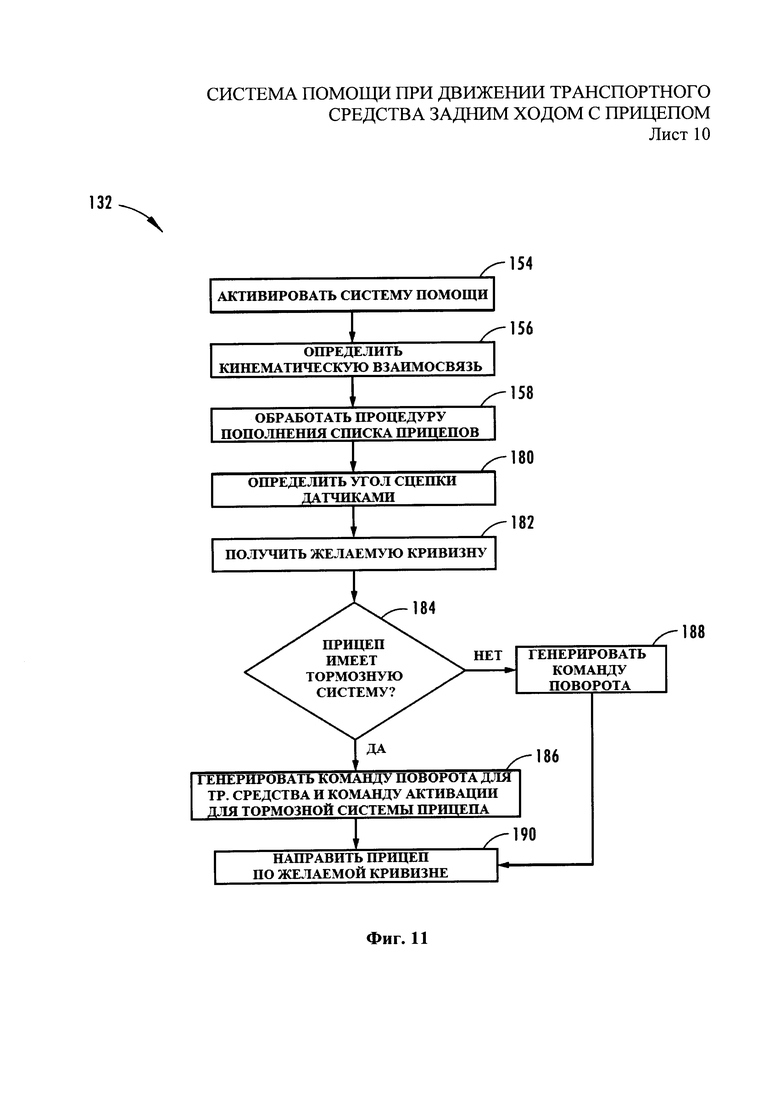
На Фиг. 11 представлена блок-схема способа работы системы помощи при движении задним ходом с прицепом с активным торможением прицепа, где используется система активного торможения прицепа, в соответствии с одним вариантом осуществления изобретения.
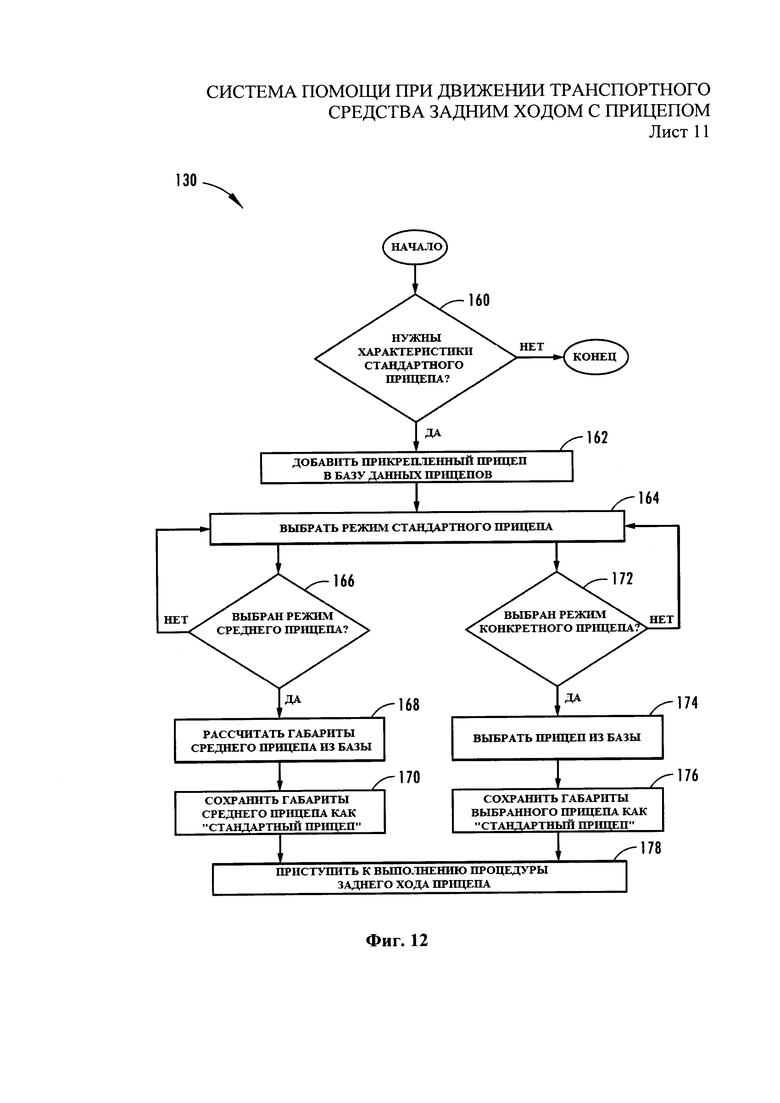
На Фиг. 12 представлена блок-схема способа работы системы помощи при движении задним ходом с прицепом с использованием процедуры пополнения списка прицепов, в соответствии с одним вариантом осуществления изобретения.
Осуществление изобретения
Для целей настоящего описания предложенная система помощи при движении задним ходом с прицепом и соответствующие способы могут подразумевать различные варианты воплощения и ориентации, если явно не указано иное. Также следует понимать, что конкретные устройства и способы, проиллюстрированные на сопроводительных чертежах и рассмотренные в следующем описании, являются иллюстративными вариантами осуществления изобретательских концепций, сформулированных в формуле изобретения. Хотя в настоящем документе различные аспекты системы помощи при движении задним ходом с прицепом и соответствующие способы работы описаны со ссылкой на конкретный иллюстративный вариант осуществления, данное изобретение не ограничивается представленными вариантами осуществления, т.е. без отступления от сущности изобретения в него могут быть внесены дополнительные изменения, также возможны другие варианты использования и осуществления изобретения. Таким образом, конкретные размеры и другие физические характеристики, использованные в примерах осуществления настоящего изобретения, не должны рассматриваться как ограничения, если не указано иное.
На Фиг. 1-12 ссылочной позицией 10 обозначена система помощи при движении задним ходом с прицепом, которая предназначена для управления траекторией движения задним ходом прицепа 12, присоединенного к транспортному средству 14, которая позволяет водителю транспортного средства 14 указывать желаемую кривизну 26 траектории при движении прицепа 12 задним ходом. В соответствии с одним вариантом осуществления изобретения система 10 помощи при движении задним ходом с прицепом автоматически управляет транспортным средством 14 так, чтобы при движении задним ходом направить прицеп 12 по желаемой крив 26, когда водитель нажимает на педали газа и тормоза, чтобы управлять скоростью заднего хода транспортного средства 14. В некоторых вариантах прицеп 12 может иметь тормозную систему 13 для торможения колес 15 прицепа 12 независимо от системы 72 управления тормозами транспортного средства. Для отслеживания положения прицепа 12 относительно транспортного средства 14 в системе 10 помощи при движении задним ходом с прицепом может быть предусмотрена сенсорная система 16, воспринимающая угол сцепки γ между прицепом 12 и транспортным средством 14, и которая может представлять собой датчик 44 контроля угла сцепки или датчик угла сцепки. Кроме того, система 10 помощи при движении задним ходом с прицепом может включать в себя устройство 18 ввода рулевых команд (например, устройство 20 выбора режима работы или поворотную ручку 30), предназначенное для ввода желаемой кривизны (или траектории заднего хода) 26 прицепа 12. После ввода желаемой кривизны (или траектории заднего хода) 26 может быть сгенерирована команда рулевого управления, основанная на измеренном угле сцепки γ и кинематической взаимосвязи между прицепом 12 и транспортным средством 14, чтобы направить прицеп 12 по желаемой кривой (или траектории заднего хода) 26. Контроллер 28 кривизны в системе 10 помощи при движении задним ходом с прицепом также может генерировать команду активации тормозной системы прицепа 12, чтобы направить прицеп 12 по желаемой кривой (или траектории заднего хода) 26. За счет активации тормозной системы прицепа 12, контроллер 28 уменьшает пройденное назад расстояние, чтобы получить желаемую кривизну (или траекторию заднего хода) 26. Следует понимать, что в дополнительных вариантах система 10 помощи при движении задним ходом с прицепом также может активировать тормозную систему 13 прицепа 12 так, чтобы увеличить пройденное назад расстояние, чтобы получить желаемую кривизну (или траекторию заднего хода) 26, как более подробно рассмотрено далее.
На Фиг. 1 изображено транспортное средство 14, представляющее собой грузовой автомобиль-пикап с одним вариантом системы 10 помощи при движении задним ходом с прицепом, предназначенной для управления траекторией заднего хода прицепа 12, присоединенного к транспортному средству 14. В частности, транспортное средство 14 поворотно соединено с одним вариантом прицепа 12, имеющего коробчатую раму 32 с закрытым багажным отделением 34, единственную ось с правым колесом 35 и левым колесом, дышло 36, проходящее продольно вперед от закрытого багажного отделения 34. Левое и правое колеса 35 имеют электрические фрикционные тормоза, каждый из которых имеет барабан и тормозные башмаки с электрическим приводом, выполненные с возможностью замедлять или останавливать вращение соответствующего колеса за счет сцепления с барабаном. Подразумевается, что левое и правое колеса 35 в качестве альтернативы или дополнения могут иметь другие типы тормозных механизмов, в т.ч. гидравлические тормозные приводы. Показанный на рисунке прицеп 12 также имеет тягово-сцепной соединитель в виде сцепки 38, соединенной со сцепным соединителем транспортного средства в виде сцепного шара 40. Сцепка 38 зацепляется за сцепной шар 40 и создает шаровое шарнирное соединение 42, которое позволяет изменять угол сцепки γ. Следует понимать, что в дополнительных вариантах прицеп 12 может по-другому соединяться с транспортным средством 14 для создания поворотного соединения, например, с помощью седельно-сцепного устройства. Также подразумевается, что в дополнительных вариантах прицеп может иметь более одной оси и может иметь разнообразные формы и размеры, рассчитанные на различные нагрузки и предназначенные для различных грузов, такие как прицеп для лодок или прицеп-платформа.
На Фиг. 1 представлен иллюстративный вариант сенсорной системы 16, который включает в себя видеодатчик 44 угла сцепки, предназначенный для измерения угла сцепки γ между транспортным средством 14 и прицепом 12. Изображенный датчик 44 угла сцепки использует камеру 46 (например, видеокамеру), которая может быть расположена рядом с верхней частью задней двери 48 в задней части транспортного средства 14 таким образом, чтобы камера 46 находилась выше дышла 36 прицепа 12. Подразумевается, что в дополнительных вариантах датчик 44 угла сцепки и сенсорная система 16 для определения угла сцепки γ могут представлять собой одно из следующих устройств или их комбинацию: потенциометр, магнитный датчик, оптический датчик, бесконтактный датчик приближения, вращающийся датчик, емкостной датчик, индуктивный датчик, механический датчик, такой как механический датчик, установленный на шаровом шарнирном соединении 42, датчик скорости рыскания на прицепе 12 и транспортном средстве 14, преобразователи электрической энергии системы помощи при движении задним ходом, систему контроля слепых зон и/или систему предупреждения об обнаружении пересекающего потока движения, а также другие приемлемые датчики или индикаторы угла сцепки γ, которые могут быть использованы в качестве альтернативы или дополнения к видеодатчику 44 угла сцепки.
В системе 10 помощи при движении задним ходом с прицепом, представленной на Фиг. 2, датчик 44 угла сцепки предоставляет информацию об обнаруженном угле сцепки γ в систему 10 помощи при движении задним ходом с прицепом. Аналогичным образом, изображенный вариант осуществления системы 10 помощи при движении задним ходом с прицепом получает информацию, относящуюся к состоянию транспортного средства, от дополнительных датчиков и устройств, которые могут включать в себя позиционирующее устройство 56, датчик скорости 58 и датчик 60 скорости рысканья, установленные на транспортном средстве 14. Подразумевается, что в дополнительных вариантах датчик 44 угла сцепки и другие датчики и устройства транспортного средства могут предоставлять сенсорные сигналы или другую информацию, которая может быть обработана с помощью различных процедур с целью определения значения или показателя, такого как значение угла сцепки или диапазона углов сцепки γ.
На Фиг. 2 также показано, что в соответствии с одним вариантом осуществления система 10 помощи при движении задним ходом с прицепом обменивается данными с системой 62 усиленного рулевого управления транспортного средства 14, чтобы выполнять операции с управляемыми колесами 64 (Фиг. 1) транспортного средства 14 для перемещения транспортного средства 14 так, чтобы прицеп 12 реагировал в соответствии с желаемой кривизной его траектории. В иллюстративном варианте система 62 усиленного рулевого управления представляет собой систему рулевого управления с электроусилителем (EPAS), которая включает в себя электрический двигатель 66 рулевого привода, поворачивающий управляемые колеса 64 на угол, основанный на команде рулевого управления, благодаря чему датчик 67 угла поворота, установленный в системе 62 управления с усилителем, может определять угол поворота. Команда рулевого управления может быть обеспечена системой 10 для автономного рулевого управления при маневрировании задним ходом, а может, в качестве альтернативы, быть подана вручную через установку поворотного положения (например, угла поворота рулевого колеса) рулевого колеса 68 (Фиг. 1). Однако в иллюстративном варианте рулевое колесо 68 транспортного средства 14 механически соединено с управляемыми колесами 64 транспортного средства 14 таким образом, чтобы рулевое колесо 68 перемещалось в соответствии с поворотом управляемых колес 64, предотвращая вмешательство оператора в работу рулевого колеса 68 во время автономного руления, что может быть обнаружено с помощью установленного на нем датчика 70 крутящего момента.
В варианте осуществления с Фиг. 2 система 62 усиленного рулевого управления передает контроллеру кривизны 28 системы 10 информацию, относящуюся к поворотному положению управляемых колес 64 транспортного средства 14, включая угол поворота. В иллюстративном варианте контроллер кривизны 28 обрабатывает текущее значение угла поворота, а также данные о других условиях работы транспортного средства 14 и прицепа 12, чтобы направить прицеп 12 по желаемой траектории 26 заднего хода и/или по желаемой кривой. Следует понимать, что в дополнительных вариантах система 10 помощи при движении задним ходом с прицепом может быть встроена в систему 62 усиленного рулевого управления.
Как также показано на Фиг. 2, система 72 управления тормозами транспортного средства также обменивается данными с контроллером кривизны 28 для передачи в систему 10 помощи при движении задним ходом с прицепом информации о торможении, такой как скорость вращения колеса, и для получения от контроллера кривизны 28 команд о торможении. Например, информация о скорости движения транспортного средства может быть получена на основании значений скорости отдельных колес, контролируемых системой 72 управления тормозами. Скорость движения транспортного средства также может быть получена с помощью системы 74 управления силовым агрегатом, датчика скорости 58, позиционирующего устройства 56 и других приемлемых устройств. В некоторых вариантах значения скорости отдельных колес также могут быть использованы для определения скорости рысканья транспортного средства, которая может быть передана в систему 10 помощи при движении задним ходом с прицепом в качестве альтернативы или дополнения к датчику 60 рыскания, для использования при определении команд рулевого управления транспортным средством. В некоторых вариантах система 10 помощи при движении задним ходом с прицепом может предоставлять данные о торможении транспортного средства в систему 72 управления тормозами, чтобы система 10 помощи при движении задним ходом с прицепом могла управлять торможением транспортного средства 14 во время заднего хода прицепа 12. Например, в некоторых вариантах система 10 помощи при движении задним ходом с прицепом может регулировать скорость движения транспортного средства 14 во время заднего хода прицепа 12 таким образом, чтобы снизить вероятность возникновения неприемлемых условий для заднего хода прицепа. К неприемлемым условиям заднего хода прицепа можно отнести, не ограничиваясь этим, превышение скорости движения транспортного средства 14, высокий угол сцепки, динамическую неустойчивость угла прицепа, достижение расчетного теоретического значения для складывания прицепа (определяемого на основании максимального угла поворота транспортного средства, длины дышла, колесной базы буксирующего транспортного средства и эффективной длины прицепа) или ограничение физического контакта складывания (определяемого пределом углового смещения относительно транспортного средства 14 и прицепа 12) и тому подобное. В соответствии с настоящим изобретением система 10 помощи при движении задним ходом с прицепом может выдавать сигнал тревоги, сообщающий об обнаружении, приближении и/или прогнозировании возникновения неприемлемого условия при движении прицепа задним ходом.
Система 74 управления силовым агрегатом, изображенная на Фиг. 2, также может взаимодействовать с системой 10 помощи при движении задним ходом с прицепом для регулировки скорости и ускорения транспортного средства 14 при маневре заднего хода прицепа 12. Как было упомянуто выше, регулировка скорости движения транспортного средства 14 по команде управления скоростью, генерируемой контроллером кривизны 28, может быть необходима для ограничения вероятности возникновения неприемлемых условий при выполнении заднего хода прицепа.
Система 10 помощи при движении задним ходом с прицепом, изображенная на Фиг. 2, также включает в себя тормозную систему 13 прицепа, которая сообщает контроллеру кривизны 28 информацию о состоянии тормозов и получает команды активации тормозов одного или нескольких колес прицепа 12. Более конкретно, представленный вариант тормозной системы 13 прицепа имеет левый колесный тормоз 75 и правый колесный тормоз 77, которые могут независимо друг от друга предоставлять информацию о состоянии тормозов и получать команды активации. Колесные тормоза 75, 77 прицепа 12 могут представлять собой электрические фрикционные тормоза, гидравлические тормозные приводы, другие стандартные типы тормозов или их сочетания. Что касается информации о состоянии тормозов, которая может быть предоставлена контроллеру кривизны 28 тормозной системой 13 прицепа, подразумевается, что скорость вращения колес 15 прицепа может быть определена и сообщена контроллеру кривизны 28. Аналогично этой информации о транспортном средстве, для определения скорости прицепа и транспортного средства, а также скорости рыскания прицепа, может быть использована скорость вращения колес прицепа. Эти значения скорости рыскания прицепа и скорости рыскания транспортного средства можно затем использовать для определения угла сцепки γ. В некоторых вариантах для обеспечения управления торможением прицепа 12 и транспортного средства 14 с помощью системы 10 помощи при движении задним ходом с прицепом тормозная система 13 прицепа может быть частично или полностью объединена с системой 72 управления тормозами транспортного средства или другими датчиками, устройствами или системами управления транспортным средством 14.
Как показано на Фиг. 2, представленный вариант тормозной системы 13 прицепа позволяет добавить в команду активации значение тормозного усилия для одного или обоих колесных тормозов 75, 77 (например, в виде процентной доли от доступного тормозного усилия). Также подразумевается, что команда активации может в целом состоять из команды включения для приложения заранее заданного тормозного усилия и команды выключения для удаления тормозного усилия. Известно, что для различных типов тормозных систем прицепа, таких как гидравлические системы торможения, или многоосные конструкции, команды активации могут быть соответствовать необходимым входным сигналам тормозной системы. Как более подробно описано ниже, система 10 помощи при движении задним ходом с прицепом может задействовать колесные тормоза 75, 77 тормозной системы 13 прицепа при движении транспортного средства 14 задним ходом для изменения отклика прицепа на перемещение транспортного средства 14, например тормозить колеса с внутренней стороны желаемой кривизны, чтобы уменьшить пройденное назад расстояние для достижения желаемой кривизны. Другими словами, тормозная система 13 прицепа может задействовать колесные тормоза 75, 77 прицепа 12 для обеспечения изменения угла сцепки γ с модифицированной скоростью, например с большей скоростью при торможении колеса с внутренней стороны желаемой кривизны, или с меньшей скоростью при торможении колеса с наружной стороны желаемой кривизны. В качестве дополнения для тормозной системы 13 прицепа, обеспечивающей повышенную чувствительность к перемещениям транспортного средства для направления прицепа 12 задним ходом по желаемой кривой 26, подразумевается, что тормозная система 13 прицепа также может быть использована для снижения вероятности возникновения неприемлемых условий для заднего хода прицепа. К неприемлемым условиям для заднего хода прицепа можно отнести, не ограничиваясь этим, превышение скорости движения, высокий уровень угла сцепки, динамическую неустойчивость угла прицепа, расчетное теоретическое состояние для складывания прицепа, предел складывания до физического контакта, приближение прицепа 12 или транспортного средства 14 к физическому контакту с объектом и тому подобное. В соответствии с настоящим изобретением система 10 помощи при движении задним ходом с прицепом может выдавать предупреждающий сигнал, сообщающий об обнаружении, приближении и/или прогнозировании возникновения неприемлемого условия при движении прицепа задним ходом.
Продолжая рассматривать Фиг. 2, можно сказать, что система 10 помощи при движении задним ходом с прицепом в показанном примере может обмениваться данными с одним или несколькими устройствами, включая систему 76 аварийного оповещения транспортного средства, которая может генерировать визуальные, звуковые и тактильные предупреждения. Например, тормозные фонари 78 и проблесковые сигналы транспортного средства могут выдавать визуальный сигнал тревоги, а клаксон 79 транспортного средства и/или динамик 81 могут выдавать звуковые сигналы. В качестве дополнения система 10 помощи при движении задним ходом с прицепом и/или система 76 аварийного оповещения транспортного средства могут обмениваться данными с человеко-машинным интерфейсом (HMI) 80 транспортного средства 14. Человеко-машинный интерфейс 80 может включать в себя дисплей 82 транспортного средства, такой как дисплей навигационной или развлекательной системы на центральной консоли (Фиг. 1). Также система 10 помощи при движении задним ходом с прицепом может обмениваться данными через беспроводное соединение с другим вариантом человеко-машинного интерфейса 80, например с одним или несколькими карманными или портативными устройствами, включая один или несколько смартфонов. Кроме того, портативное устройство может генерировать сигнал обратной связи, например визуальные, звуковые и тактильные предупреждения.
Как также показано на Фиг. 2, система 10 помощи при движении задним ходом с прицепом включает в себя устройство 18 ввода рулевых команд, соединенное с контроллером кривизны 28, позволяя обмен данными между ними. В соответствии с настоящим изобретением устройство 18 ввода рулевых команд может быть подключено к контроллеру кривизны 28 через проводное или беспроводное соединение. Устройство 18 ввода рулевых команд предоставляет системе 10 помощи при движении задним ходом с прицепом информацию, задающую желаемую траекторию 26 заднего хода прицепа 12 для обработки и генерирования команд рулевого управления с помощью контроллера кривизны 28. В соответствии с одним вариантом устройство 18 ввода рулевых команд может включать в себя устройство 20 выбора режима работы для выбора продольного направления 22 прицепа 12, продольного направления 24 транспортного средства 14 или кривой, основанной на текущем значении угла сцепки γ или вмешательства другого устройства 18 ввода рулевых команд, например поворотной ручки 30. Соответственно, в другом варианте устройство 18 ввода рулевых команд может включать в себя поворотное устройство ввода управляющих команд, позволяющее водителю транспортного средства 14 вводить команды по управлению движением прицепа или иным образом выбирать желаемую кривизну. Например, поворотное устройство управления может представлять собой поворотную ручку 30, которая может поворачиваться вокруг оси, проходящей через верхнюю или лицевую поверхность ручки 30. В других вариантах поворотная ручка 30 может поворачиваться вокруг оси, проходящей в целом параллельно верхней или лицевой поверхности ручки 30. Кроме того, в соответствии с дополнительными вариантами устройство 18 ввода рулевых команд может включать в себя альтернативные устройства для обеспечения желаемой кривизны или другой информации, задающей желаемую траекторию 26 заднего хода, например, джойстик, нажимные кнопки, ползунки, различные органы управления на портативном устройстве, различные пользовательские интерфейсы на сенсорном экране, видеосистемы для считывания жестов, устройства планирования траектории, другие системы построения маршрутов или другие стандартные устройства ввода, известные специалистам в данной области техники.
Ссылаясь опять на вариант, показанный на Фиг. 2, контроллер кривизны 28 снабжен микропроцессором 84 для обработки логики и процедур, хранящихся в памяти 86, куда поступает информация от устройства 18 ввода рулевых команд, датчика 44 угла сцепки, системы 62 усиленного рулевого управления, системы 72 управления торможением транспортного средства, тормозной системы 13 прицепа, системы 74 управления силовым агрегатом, а также от других датчиков и устройств транспортного средства. Контроллер кривизны 28 может генерировать команды активации тормозов прицепа, информацию и команды рулевого управления транспортным средством как функцию от всей или части информации, полученной от устройства 18 ввода рулевых команд, датчика 44 угла сцепки, системы 62 усиленного рулевого управления, системы 72 управления торможением транспортного средства, тормозной системы 13 прицепа, системы 74 управления силовым агрегатом, других датчиков и устройств транспортного средства. После этого для влияния на рулевое управление транспортным средством 14, чтобы получить заданную траекторию движения прицепа 12, команды активации тормозов прицепа могут быть переданы в тормозную систему 13 прицепа, а информация и команды рулевого управления транспортным средством могут быть переданы в систему 62 усиленного рулевого управления. Контроллер кривизны 28 может содержать микропроцессор 84 и/или другую аналоговую и/или цифровую схему для обработки одной или нескольких процедур. Также контроллер кривизны 28 может содержать память 86, в которой будет храниться одна или несколько процедур, таких как процедура 130 пополнения списка прицепов, процедура 132 торможения прицепа и процедура 98 кривизны пути. Следует понимать, что контроллер кривизны 28 может представлять собой отдельный специализированный контроллер или общий контроллер, интегрированный с другими функциями управления, например, интегрированный с сенсорной системой 16, системой 62 усиленного рулевого управления и другими стандартными бортовыми или внешними системами управления транспортным средством.
Со ссылкой на Фиг. 3 обратимся к обсуждению информации и параметров транспортного средства и прицепа, используемые для расчета кинематической взаимосвязи между кривизной траектории движения прицепа 12 и углом поворота транспортного средства, буксирующего прицеп 12, которые могут быть предпочтительными с точки зрения системы 10 помощи при движении задним ходом с прицепом, в соответствии с некоторыми вариантами осуществления, включая, в одном примере, использование управляющей процедуры 98 контроллера кривизны 28. Чтобы получить подобную кинематическую взаимосвязь, можно сделать определенные допущения, касающиеся параметров, связанных с системой транспортного средства с прицепом, такие как пренебрежение проскальзыванием колес транспортного средства 14 и прицепа 12, их перемещением в поперечном направлении или деформацией.
Как показано на Фиг. 3, кинематическая взаимосвязь для системы, образованной транспортным средством 14 и прицепом 12, основана на различных параметрах транспортного средства 14 и прицепа 12. Эти параметры включают в себя:
δ: угол поворота управляемых передних колес транспортного средства 14;
α: угол рыскания транспортного средства 14;
β: угол рыскания прицепа 12;
γ: угол сцепки (γ=β-α);
W: колесная база транспортного средства 14;
L: расстояние между точкой сцепки и задней осью транспортного средства 14;
D: расстояние между точкой сцепки и осью прицепа 12 или эффективной осью для многоосного прицепа 12 (эквивалентом может быть длина оси);
r2: радиус кривизны траектории движения для прицепа 12.
В одном варианте кинематическая взаимосвязь между радиусом r2 в средней точке оси прицепа 12, углом δ поворота управляемых колес 64 транспортного средства 14 и углом сцепки γ может быть выражена с помощью приведенного ниже уравнения. По сути, если известен угол сцепки γ, можно контролировать кривизну  траектории движения прицепа на основании угла поворота δ (где
траектории движения прицепа на основании угла поворота δ (где  - скорость рыскания прицепа, a
- скорость рыскания прицепа, a  - направленная скорость прицепа).
- направленная скорость прицепа).
Данная взаимосвязь может быть использована для представления угла δ как функции кривизны траектории движения прицепа и угла сцепки γ.

Соответственно, для определенной комбинации транспортного средства и прицепа некоторые параметры (например, D, W и L) кинематической взаимосвязи являются постоянными и считаются известными. V - продольная скорость транспортного средства, a g - ускорение свободного падения. K - параметр, зависящий от скорости, который при установке на ноль делает расчет угла поворота независящим от скорости транспортного средства. Например, параметры кинематической взаимосвязи для конкретного транспортного средства могут быть заранее заданы в электронной системе управления транспортного средства 14, а параметры кинематической взаимосвязи для конкретного прицепа могут быть введены водителем транспортного средства 14, определены, исходя из обнаруженного датчиками поведения прицепа в ответ на команды рулевого управления транспортным средством, или определены другим способом из сигналов, поступающих от прицепа 12. Кривизна траектории прицепа может быть определена на основании значения, введенного водителем с помощью устройства 18 ввода рулевых команд. Используя вышеприведенное уравнение для определения угла поворота, процедура 98 контроля кривизны пути может сгенерировать необходимую команду рулевого управления для системы 62 усиленного рулевого управления транспортного средства 14.
На Фиг. 4 представлен еще один вариант процедуры 98 контроля кривизны пути для системы 10 помощи при движении задним ходом с прицепом, демонстрирующий общую архитектурную структуру, где модуль измерения 88, регулятор 90 угла сцепки и регулятор кривизны 92 представляют собой процедуры, которые могут храниться в памяти 86 контроллера кривизны 28. В данной конфигурации устройство 18 ввода рулевых команд предоставляет регулятору кривизны 92 контроллера кривизны 28 желаемое значение кривизны , которое может быть определено на основании желаемой траектории заднего хода 26, указанной с помощью устройства 18 ввода рулевых команд. Желаемый угол сцепки γ(d) может быть вычислен регулятором кривизны 92 на основании текущего желаемого значения кривизны и угла поворота δ. Когда желаемый угол сцепки γ(d) вычислен, на его основании, а также на основании измеренного угла сцепки γ(m) и текущей скорости движения транспортного средства 14 генерируется команда угла поворота. Команда угла поворота поступает в систему 62 усиленного рулевого управления транспортного средства 14, и затем возвращается в модуль измерения 88 для повторной оценки влияния других характеристик транспортного средства в результате применения команды угла поворота или других изменений в системе. Соответственно, регулятор кривизны 92 и регулятор 90 угла сцепки непрерывно обрабатывают информацию от модуля измерений 88, чтобы предоставить точные команды угла поворота рулевого колеса, позволяющие направить прицеп 12 по желаемой траектории заднего хода 26 с желаемой кривизной без значительного выбега или непрерывных колебаний траектории движения относительно желаемой кривизны . На Фиг. 5 представлена процедура 98 контроля кривизны пути, а также регулятор кривизны 92, показанные в виде статической карты  , которая выдает опорный сигнал угла сцепки, обрабатываемый с помощью линеаризации сигнала обратной связи и реализуемый с помощью пропорционально-интегрального (Р1) контроллера, что позволяет практически полностью исключить ошибки слежения в устойчивом режиме.
, которая выдает опорный сигнал угла сцепки, обрабатываемый с помощью линеаризации сигнала обратной связи и реализуемый с помощью пропорционально-интегрального (Р1) контроллера, что позволяет практически полностью исключить ошибки слежения в устойчивом режиме.
Со ссылкой на Фиг. 6, в иллюстративных вариантах представленного предмета, желательно ограничить возможность достижения транспортным средством 14 и прицепом 12 угла складывания (т.е. наступление условий складывания системы транспортного средства с прицепом). Угол складывания γ(j) представляет собой угол сцепки γ, который не может быть преодолен путем максимально возможной рулевой команды для транспортного средства при движении задним ходом, например, с помощью перемещения управляемых передних колес транспортного средства 14 на максимальный угол поворота δ с максимальной скоростью изменения угла поворота. Угол складывания γ(j) зависит от максимального угла поворота управляемого колеса транспортного средства 14, колесной базы W транспортного средства 14, расстояния L между точкой сцепки и задней осью транспортного средства 14 и расстояния D между точкой сцепки и осью прицепа 12, или эффективной осью при наличии у прицепа 12 нескольких осей. Когда угол сцепки γ для транспортного средства 14 и прицепа 12 становится равным или превышает угол складывания γ(j), транспортное средство 14 может быть продвинуто вперед для уменьшения угла сцепки γ. Таким образом, для ограничения вероятности возникновения угла складывания в системе транспортного средства с прицепом предпочтительно отслеживать угол рыскания прицепа 12 и поддерживать угол сцепки γ между транспортным средством и прицепом на относительно низком уровне.
Кинематическая модель транспортного средства 14 с прицепом 12 может быть использована для определения угла складывания для комбинации транспортное средство-прицеп. Соответственно, со ссылкой на Фиг. 3 и 6, предел угла поворота управляемых передних колес требует, чтобы угол сцепки γ не превышал угол складывания γ(j), который также известен как критический угол сцепки γ. Таким образом, с учетом ограничения, что угол сцепки γ не может быть больше угла складывания γ(j), угол складывания γ(j) представляет собой угол сцепки γ, который способен обеспечить движение транспортного средства с прицепом по кругу при максимальном угле δ(max) поворота управляемых колес 64. Угол поворота для обеспечения движения по кругу при угле сцепки γ определяется следующим уравнением.
Решая данное уравнение относительно угла сцепки γ, можно определить угол складывания γ(j).
Как было сказано выше со ссылкой на проиллюстрированные варианты, во время работы системы 10 помощи при движении задним ходом с прицепом водитель транспортного средства 14 может быть ограничен по способу введения рулевых команд с помощью рулевого колеса 68 транспортного средства 14, поскольку система 62 усиленного рулевого управления напрямую соединена с рулевым колесом 68. Соответственно, для ввода желаемой траектории 26 движения задним ходом (т.е. кривизны) прицепа 12 может быть использовано устройство 18 ввода рулевых команд системы 10, тем самым, отсоединяя данные команды от введения с помощью рулевого колеса 68 транспортного средства 14. Однако дополнительные варианты системы 10 помощи при движении задним ходом с прицепом могут иметь возможность выборочного отсоединения рулевого колеса 68 от передвижения управляемых колес 64 транспортного средства 14, тем самым, позволяя использовать рулевое колесо 68 для подачи команд на изменение кривизны траектории прицепа 12 или иной выбор желаемой траектории 26 движения задним ходом во время работы системы помощи при движении задним ходом с прицепом.
Со ссылкой теперь на Фиг. 7 и 8, один вариант устройства 18 ввода рулевых команд включает в себя поворотную ручку 30, которая подталкивается (например, с помощью возвратной пружины) в исходное положение P(AR) между противоположными поворотными диапазонами перемещения R(R), R(L). В варианте, проиллюстрированном на Фиг. 8, величина первого поворотного диапазона перемещения R(R) практически равна величине противоположного второго поворотного диапазона перемещения R(L). Для обеспечения тактильной индикации величины поворота ручки 30 сила, с которой ручка смещается в сторону исходного положения P(AR), может увеличиваться (например, нелинейно) в виде функции от величины поворота ручки 30 относительно исходного положения P(AR). Кроме того, ручка 30 может иметь индикаторные фиксаторы положения, чтобы водитель мог уверенно чувствовать исходное положение P(AR) и приближение к концам противоположных поворотных диапазонов перемещения R(L), R(R) (например, с помощью нежестких концевых ограничителей). Поворотная ручка 30 может генерировать желаемую кривизну в виде зависимости от величины поворота поворотной ручки 30 относительно исходного положения P(AR) и направления перемещения поворотной ручки 30 относительно исходного положения P(AR). Также подразумевается, что скорость поворота поворотной ручки 30 может использоваться для определения желаемой кривизны, выдаваемой на контроллер кривизны 28. Как более подробно будет сказано ниже, исходное положение P(AR) ручки соответствует сигналу от устройства определения величины перемещения, указывающему на необходимость руления транспортным средством 14 таким образом, чтобы прицеп 12 двигался назад по практически прямой траектории (запрос нулевой кривизны движения прицепа), соответствующей продольной оси 22 прицепа 12 при возврате ручки 30 в исходное положение P(AR). Каждое максимальное положение ручки по часовой стрелке или против часовой стрелки (т.е. крайние положения поворотных диапазонов перемещения R(R), R(L)) соответствует своему сигналу от устройства измерения перемещения, указывающему на минимальный радиус кривизны (т.е. наиболее остроугольную траекторию) пути прицепа 12, который возможен без вызывания складывания. В этой связи исходное положение P(AR) представляет собой положение для выдачи команды нулевой кривизны относительно противоположных поворотных диапазонов перемещения R(R), R(L). Соответственно, соотношение между запрошенной кривизной пути прицепа 12 (например, радиусом желательной траектории заднего хода) и соответствующей величиной поворота ручки может меняться (например, нелинейно) в пределах противоположных диапазонов R(L), R(R) перемещения ручки. Также предполагается, что в соответствии с изобретением данное соотношение может зависеть от скорости движения транспортного средства, геометрии прицепа, геометрии транспортного средства, геометрии сцепки и/или нагрузки на прицеп.
Со ссылкой на Фиг. 7, когда водитель транспортного средства 14 двигает прицеп 12 назад, он может повернуть поворотную ручку 30, чтобы указать желаемую траекторию заднего хода 26 для прицепа или, аналогично, чтобы подавить/модифицировать заданную устройством 20 выбора режима желаемую кривизну или желаемую траекторию заднего хода 26. В соответствии с вариантом, показанным на Фиг. 7, устройство 18 ввода рулевых команд реализовано в виде поворотной ручки 30, позволяющей водителю транспортного средства 14 вводить команду о желаемой траектории заднего хода 26, указывая желаемую кривизну. В проиллюстрированном варианте поворотная ручка 30 поворачивается вокруг центральной оси между средним положением 114, соответствующим практически прямой траектории заднего хода 26, заданной продольным направлением 22 прицепа 12, и различными положениями поворота 116, 118, 120, 122 на противоположных сторонах от среднего положения 114, задающими желаемую кривизну , соответствующую радиусу желаемой траектории заднего хода 26 для прицепа 12 при установленных положениях поворота. Подразумевается, что поворотная ручка 30 может быть выполнена в соответствии с различными вариантами осуществления изобретения и в ней может не использоваться средство для обеспечения возврата в исходное положение P(AR) между противоположными поворотными диапазонами перемещения. Отсутствие подпружинивания может позволить сохранить текущее положение поворотной ручки 30 до тех пор, пока поворотное устройство управления не будет вручную перемещено в другое положение. Также предполагается, что устройство 18 ввода рулевых команд может включать в себя неповоротное устройство управления, которое может быть выполнено с возможностью выбора желаемой траектории заднего хода 26 и подавления или дополнения устройства 20 выбора режима или другого устройства 18 ввода рулевых команд. Примерами таких неповоротных устройств ввода могут быть, не ограничиваясь этим, группа нажимных кнопок (например, изгиб налево, изгиб направо и движение по прямой), сенсорный экран, на котором водитель может нарисовать или иным образом ввести значение кривизны траектории, кнопка, перемещаемая поступательно вдоль оси, с помощью которой водитель может ввести команды о траекториях движения задним ходом, или устройство типа джойстика и тому подобное.
Как также показано на Фиг. 8, в одном варианте устройство 18 ввода рулевых команд включает в себя устройство 20 выбора режима, имеющее три отдельные кнопки, которые соответствуют трем различным режимам управления задним ходом. Первая кнопка 96 позволяет выбрать статическую ориентацию транспортного средства 14, чтобы задать траекторию заднего хода, ориентированную вдоль продольного направления транспортного средства 14, чтобы направить прицеп 12 из его ориентации в момент нажатия на первую кнопку 96 в положение, в котором его продольное направление будет соответствовать продольному направлению транспортного средства 14. Продольные направления 24 транспортного средства 14 и прицепа 12 также могут быть определены как центральная осевая линия, такая как ориентация дышла 36 прицепа 12 и ориентация сцепного соединителя транспортного средства, выступающего от транспортного средства 14. Вторая кнопка 100 может быть выбрана, чтобы подать команду контроллеру кривизны 28 обработать процедуру движения прицепа прямо, которая может сгенерировать команды рулевого управления для системы 62 усиленного рулевого управления, которые обеспечат маневрирование транспортного средство 14 так, чтобы в целом сохранить ориентацию прицепа 12 относительно поверхности земли и окружающей среды, чтобы направить прицеп 12 вдоль траектории заднего хода. Третья кнопка 104 устройства 20 выбора режима может быть выбрана, чтобы подать контроллеру кривизны 28 команду обработать процедуру для траектории с фиксированной кривизной, которая может зафиксировать входной сигнал о желаемой кривизне или желаемой траекторию заднего хода 26, чтобы прицеп 12 следовал по круговой траектории с в целом устойчивым радиусом. Подразумевается, что устройство 20 выбора режима в дополнительных вариантах может включать в себя большее или меньшее количество режимов или процедур заднего хода и, следовательно, большее или меньшее количество кнопок выбора. Каждая отдельная кнопка также может иметь элемент подсветки, который в представленном варианте показан как светодиод 112 рядом с каждой отдельной кнопкой. В иллюстративном варианте поворотная ручка 30 может быть использована дополнительно к устройству 20 выбора режима при вводе в контроллер кривизны 28 желаемой траектории движения прицепа 12 задним ходом. Подразумевается, что поворотная ручка 30 в дополнительных вариантах может быть использована для подавления команд устройства 20 выбора режима и независимого указания желаемой траектории заднего хода для процедуры 98 управления кривизной, чтобы генерировать команды рулевого управления, как было описано выше со ссылкой на Фиг. 4 и 5.
На Фиг. 9 изображено транспортное средство 14, движущееся задним ходом с прицепом 12, который не задействует колесные тормоза тормозной системы 13 или не имеет такой тормозной системы. В исходном положении 134 транспортное средство 14 и прицеп 12 расположены примерно на одной линии, с углом сцепки примерно равным нулю, а устройство 18 ввода рулевых команд системы помощи при движении задним ходом с прицепом предоставляет желаемую кривизну для прицепа 12, которая показана в виде окружности 135, выполненной сплошной линией. После получения желаемой кривизны от устройства 18 ввода рулевых команд контроллер кривизны 28 генерирует команду рулевого управления, которая сначала поворачивает управляемые колеса 64 транспортного средства в направлении под углом налево, для перемещения транспортного средства 14 в ориентацию, которая приближает угол сцепки к величине, соответствующей желаемой кривизне. После достижения промежуточного положения 136, в котором угол сцепки близок желаемой кривизне, контроллер кривизны 28 генерирует команду рулевого управления, по которой управляемые колеса 64 транспортного средства 14 поворачиваются в противоположном направлении для перемещения транспортного средства в конечное положение 138, что в целом позволит транспортному средству 14 направлять прицеп 12 непрерывно по траектории с желаемой кривизной, что обозначено в виде пунктирной окружности 137. Величина перемещения назад из исходного положения транспортного средства в конечное положение обозначена позицией 140. Однако следует понимать, что величина перемещения назад также может быть определена как измеренное расстояние вдоль криволинейного пути, пройденного фиксированной центральной точкой транспортного средства между управляемыми колесами 64. Как показано на рисунке, расстояние 142 между исходно введенной желаемой кривизной и достигнутой кривизной в одном варианте представляет собой поперечное смещение.
В соответствии с вариантом, проиллюстрированным на Фиг. 10, транспортное средство 14 движется задним ходом с прицепом 12 аналогично Фиг. 9, за исключением того, что прицеп 12 с Фиг. 10 задействует свою тормозную систему 13. В частности, правый колесный тормоз 77 внутри желаемой кривой независимо тормозит правое колесо 15 прицепа 12 для уменьшения величины перемещения назад, чтобы достичь желаемой кривизны. При сравнении маневров заднего хода, показанных на Фиг. 9 и 10, можно увидеть, что исходные положения 134 практически идентичны, имеют углы сцепки примерно равными нулю, а устройство 18 ввода рулевых команд системы 10 помощи при движении задним ходом с прицепом предоставляет желаемую траекторию движения для прицепа 12, показанную примерно одинаковыми сплошными окружностями 135. Однако по мере отдаления от исходного положения 134 разница становится более очевидной. Контроллер кривизны 28 генерирует команду рулевого управления, которая сначала поворачивает управляемые колеса 64 транспортного средства 14 в направлении, также ориентированном под углом налево, чтобы также переместить транспортное средство 14 в ориентацию, которая приближает угол сцепки к величине, соответствующей желаемой кривизне. Однако промежуточное положение 144, показанное на Фиг. 10, достигается несколько быстрее, чем промежуточное положение 136, показанное на Фиг. 9, поскольку правое колесо 15 прицепа остается в почти неподвижном положении. После достижения промежуточного положения 144 угол сцепки приближается к соответствующей желаемой кривизне, и контроллер кривизны 28 генерирует команду рулевого управления, по которой управляемые колеса 64 транспортного средства 14 поворачиваются в противоположном направлении для перемещения транспортного средства 14 в конечное положение 146, которое в целом позволяет транспортному средству направлять прицеп непрерывно вдоль желаемой кривой, что также показано в виде пунктирной окружности 148. Конечное положение 146 на Фиг. 10 также достигается быстрее, чем конечное положение 138 на Фиг. 9. Для более ясной иллюстрации этих различий величина перемещения назад от исходного положения 134 транспортного средства 14 до конечного положения показана продольно с помощью позиции 150. Следует понимать, что величина перемещения назад, также как и в предыдущем случае, может быть определена как измеренное расстояние вдоль криволинейного пути, пройденного фиксированной центральной точкой транспортного средства. Также можно увидеть, что расстояние 152 между изначально введенной желаемой кривизной и достигнутой кривизной направлено под углом ближе к продольному, то есть фактически достигнутое положение ближе к исходному положению 134 транспортного средства 14 и прицепа, чем исходная траектория с желаемой кривизной.
На Фиг. 11 представлен способ применения одного варианта процедуры 132 торможения прицепа с использованием системы 10 помощи при движении задним ходом с прицепом. На этапе 154 способ начинается с включения системы 10 помощи при движении задним ходом с прицепом. Предполагается, что это может быть сделано различными способами, например путем выбора соответствующей опции на дисплее 82 человеко-машинного интерфейса 80 транспортного средства. На следующем этапе 156 определяют кинематическую взаимосвязь между присоединенным прицепом 12 и транспортным средством 14. Чтобы определить кинематическую взаимосвязь, различные параметры транспортного средства 14 и прицепа 12, должны быть определены датчиками, введены водителем или другим образом установлены системой 10, чтобы сгенерировать команды рулевого управления для системы 62 усиленного рулевого управления в соответствии с желаемой кривизной или траекторией заднего хода 26 прицепа 12. Как обсуждается со ссылкой на Фиг. 3-6, кинематические параметры для определения кинематической взаимосвязи включают в себя длину прицепа 12, колесную базу транспортного средства 14, расстояние от сцепного устройства до задней оси транспортного средства 14 и угол сцепки γ между транспортным средством 14 и прицепом 12, а также другие переменные и параметры, указанные выше. Соответственно, после определения кинематической взаимосвязи система 10 помощи при движении задним ходом с прицепом может перейти на этап 158, на котором выполняется процедура 130 пополнения списка прицепов.
На Фиг. 12 проиллюстрирован один вариант процедуры 130 пополнения списка прицепов. Первое решение процедуры 130 принимается на этапе 160, где определяют, нужно ли использовать характеристики стандартного прицепа. Характеристики стандартного прицепа, заданные процедурой 130, позволяют контроллеру кривизны 28 генерировать команды рулевого управления и команды активации тормозов прицепа так, чтобы присоединенный прицеп 12 реагировал на входные сигналы устройства 18 ввода рулевых команд практически так же, как и стандартный прицеп. Если характеристики стандартного прицепа не нужны, процедура 130 завершается и начинается процедура 132 торможения прицепа. В противном случае на этапе 162 присоединенный прицеп 12 добавляют в сохраненную базу данных прицепов. Эта база данных может представлять собой базу данных прицепов, которые были присоединены к транспортному средству 14 ранее, предыдущих присоединенных прицепов, которые двигались задним ходом под управлением системы 10, прицепах, которые могут быть присоединены к транспортному средству 14, и других возможных групп прицепов.
На этапе 164 процедуры 130, представленной на Фиг. 12, водителю предлагается выбрать режим работы со стандартным прицепом, например, с помощью дисплея 82 человеко-машинного интерфейса 80 транспортного средства. Показанная процедура 130 предусматривает возможность выбора режима среднего прицепа или режима конкретного прицепа, хотя следует понимать, что может быть выбрано больше или меньше стандартных режимов работы с прицепом. Если на этапе 166 определено, что выбран режим среднего прицепа, на этапе 168 рассчитывают средние габариты прицепа из базы данных прицепов. Используя средние габариты прицепа, на этапе 170 задают и сохраняют параметры стандартного прицепа, которые применяют при генерировании команд скорости, команд рулевого управления и команд активации тормозов прицепа, которые позволяют прицепу 12 выйти на желаемую кривую в рамках по существу того же расстояния перемещения назад, что и у стандартного прицепа. В противном случае, если на этапе 172 определено, что был выбран режим конкретного прицепа, на этапе 174 процедура предлагает водителю выбрать из базы данных тот прицеп, который водитель хочет использовать в качестве стандартного прицепа. Также подразумевается, что в качестве альтернативы водитель может сам ввести габариты, используемые в качестве стандартного прицепа. На этапе 176 сохраненные габариты выбранного прицепа повторно сохраняют, чтобы охарактеризовать стандартный прицеп для использования при генерировании команд скоростью, команд рулевого управления и команд активации тормозов прицепа, которые позволяют прицепу 12 выйти на желаемую кривую в рамках по существу того же расстояния перемещения назад, что и у стандартного прицепа. После сохранения габаритов переменного стандартного прицепа на этапе 178 начинается процедура 132 торможения прицепа.
Со ссылкой на Фиг. 11, на этапе 180 определяют угол сцепки γ между транспортным средством 14 и прицепом 12, хотя это может выполняться непрерывно во время работы системы 10 помощи при движении задним ходом с прицепом. Подразумевается, что в дополнительных вариантах системы 10 этапы определения кинематической взаимосвязи и определения угла сцепки γ могут выполняться до включения системы 10 или в любой момент до генерирования команд рулевого управления. Соответственно, на этапе 182 от устройства 18 ввода рулевых команд получают информацию о желаемой кривизне. Перед генерированием команд рулевого управления на этапе 184 процедура 132 торможения прицепа определяет, имеет ли присоединенный прицеп 12 тормозную систему 13. Если тормозная система 13 обнаружена датчиками на прицепе 12 или иным образом определено, что она имеется на прицепе 12, на этапе 186 могут быть сгенерированы команды рулевого управления вместе с командами активации тормозной системы 13, на основании желаемой кривизны, выявленного угла сцепки и параметров стандартного прицепа (если они были определены процедурой 130). Если тормозная система 13 не обнаружена датчиками или иным образом не определено ее наличие на присоединенном прицепе 12, на этапе 188 могут быть сгенерированы команды рулевого управления, основанные на желаемой кривизне, выявленном датчиками угле сцепки и параметрах стандартного прицепа (если они были определены процедурой 130). Команды рулевого управления и команды активации тормозов могут генерироваться совместно с обработкой процедуры 98 для кривизны, как было описано выше. На этапе 190 команды рулевого управления и команды активации выполняются с целью направления прицепа 12 по желаемой кривой, заданной устройством 18 ввода рулевых команд.
Параллельно с выполнением операций по получению запросов от системы помощи при движении задним ходом с прицепом, определением желаемой траектории заднего хода 26 и кривизны пути прицепа 12, а также и генерированием команд рулевого управления транспортным средством и команд активации тормозов прицепа, система 10 может выполнять операцию по контролю наличия неприемлемых условий для движения задним ходом с прицепом. В качестве примеров такого контроля можно указать, без ограничения перечисленным, оценку превышения предельного значения угла сцепки γ, оценку скорости заднего хода относительно ее предельного значения, оценку угла поворота транспортного средства относительно его предельного значения, оценку других рабочих параметров (например, продольного ускорения транспортного средства, степени нажатия педали газа и изменения угла сцепки) с соответствующими предельными значениями, и тому подобное. Если было обнаружено, что имеют место неприемлемые условия для движения прицепа задним ходом, может быть выполнена операция прекращения текущего пути перемещения прицепа 12 (например, остановка транспортного средства 14), с последующим выполнением операции завершения работы системы помощи при движении задним ходом с прицепом.
Специалистам в данной области техники следует понимать, что конструкция вышеизложенного изобретения и других компонентов не ограничена использованием каких-либо конкретных материалов. Изложенные другие примеры изобретения могут быть выполнены из различных материалов, если не указано иное.
В контексте настоящего описания термин «соединен» (во всех формах: соединять, соединяющий, соединенный и т.д.) обычно означает прямое или непрямое соединение двух компонентов (электрических или механических) друг с другом. Такое соединение может быть по своей природе неподвижным или подвижным. Такое соединение может быть выполнено с помощью двух компонентов (электрических или механических) и любых дополнительных промежуточных элементов, образующих один цельный компонент с другим или другими двумя компонентами. Такое соединение может быть по своей природе стационарным или разъемным/разъединяемым, если не указано иное.
Также важно отметить, что конструкции и расположение элементов изобретения, представленных в вариантах осуществления изобретения, являются исключительно иллюстративными. Специалисты в данной области техники должны понимать, что, несмотря на то, что изобретение было описано посредством примера со ссылкой на один или более предпочтительных вариантов осуществления, оно не ограничивается ими, и что возможно внесение одного или более изменений (например, изменение размеров, конструкции, формы и пропорций различных элементов, значения параметров, монтажного исполнения, используемых материалов, цвета, ориентации и т.д.) без отступления от новых принципов и преимуществ заявленного изобретения. Например, элементы, представленные как единое целое, могут состоять из нескольких частей, а элементы, представленные в виде множества частей, могут быть цельным компонентом, также порядок работы интерфейсов можно обратить или изменить иным образом, длина или ширина конструкций и/или элементов, либо соединителей или других элементов системы может отличаться. Также может отличаться конфигурация или количество установочных положений между элементами. Следует отметить, что элементы и/или сборочные узлы системы могут состоять из любого набора материалов, которые обеспечивают достаточную прочность и долговечность, а также они могут иметь различные цвета, текстуры и их комбинации. Таким образом, предполагается, что все такие модификации входят в объем настоящего изобретения. В конструкции и конфигурации требуемых и других примерных вариантов осуществления также могут быть выполнены другие замены, модификации, изменения и исключения, необходимые в определенных условиях эксплуатации, без отступления от сущности настоящего изобретения.
Следует понимать, что любые описанные процессы или этапы описанных процессов могут быть объединены с другими процессами или этапами для формирования структур в рамках сущности настоящего изобретения. Описанные примеры конструкций и процессов приведены лишь для наглядности и не должны рассматриваться как ограничения.
Следует понимать, что в вышеуказанную конструкцию могут быть внесены изменения и модификации без отклонения от концепции изобретения, которые изложены в нижеследующей формуле изобретения, если явным образом не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2608786C2 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ ФАКТИЧЕСКОГО УГЛА СЦЕПКИ МЕЖДУ ТРАНСПОРТНЫМ СРЕДСТВОМ И ПРИЦЕПОМ | 2015 |
|
RU2600178C2 |
| СИСТЕМА И СПОСОБ КАЛИБРОВКИ СИСТЕМЫ ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2015 |
|
RU2584372C1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2575663C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ СОЕДИНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2573691C1 |
| УЗЕЛ ДАТЧИКА УГЛА СЦЕПКИ | 2015 |
|
RU2613123C2 |
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ РАЗМЕЩЕНИЯ МЕТКИ НА ПРИЦЕПЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2574505C1 |
| СИСТЕМА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2574042C1 |
| Мобильная система помощи водителю автомобиля с прицепом при маневрировании задним ходом | 2018 |
|
RU2694645C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА СЦЕПКИ МЕЖДУ ТРАНСПОРТНЫМ СРЕДСТВОМ И ПРИЦЕПОМ | 2015 |
|
RU2617895C2 |
Предложена система транспортного средства для помощи при движении задним ходом с прицепом. Система помощи при движении задним ходом с прицепом для транспортного средства содержит прицеп, имеющий тормозную систему, устройство ввода рулевых команд и контроллер. Устройство ввода рулевых команд обеспечивает траекторию с желаемой кривизной для прицепа. Контроллер генерирует команду рулевого управления для транспортного средства и команду активации для тормозной системы, чтобы направить прицеп по траектории с желаемой кривизной и уменьшить расстояние перемещения назад для достижения траектории с желаемой кривизной. Команда рулевого управления и команда активации выполнены с возможностью позволить достичь траектории с желаемой кривизной для первого прицепа при, по существу, таком же расстоянии перемещения назад, как и для второго более короткого прицепа. Достигается упрощение управления движением транспортнного средства с прицепом. 3 н. и 15 з.п. ф-лы, 12 ил.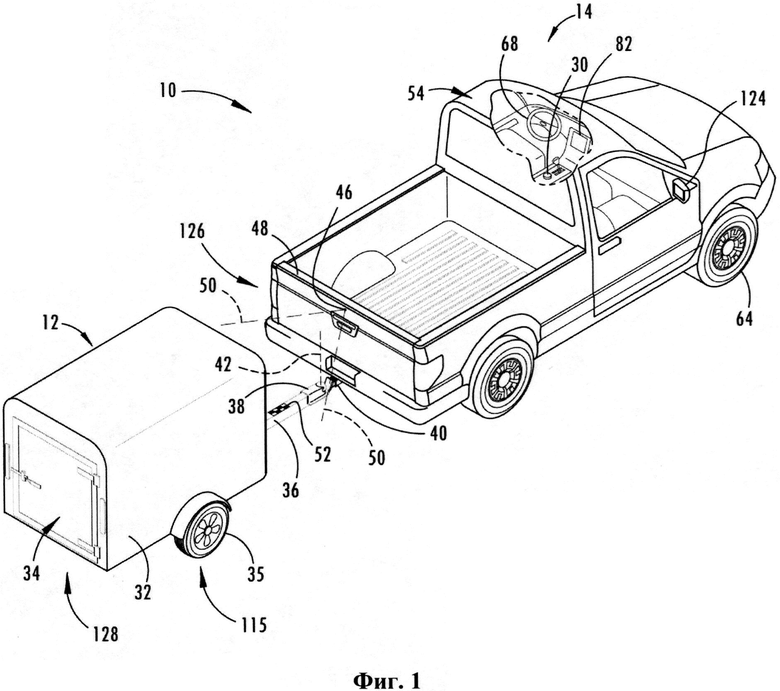
1. Система помощи при движении задним ходом с прицепом для транспортного средства, содержащая:
прицеп, имеющий тормозную систему;
устройство ввода рулевых команд, обеспечивающее траекторию с желаемой кривизной для прицепа; и
контроллер, генерирующий команду рулевого управления для транспортного средства и команду активации для тормозной системы, чтобы направить прицеп по траектории с желаемой кривизной и уменьшить расстояние перемещения назад для достижения траектории с желаемой кривизной, при этом команда рулевого управления и команда активации выполнены с возможностью позволить достичь траектории с желаемой кривизной для первого прицепа при, по существу, таком же расстоянии перемещения назад, как и для второго более короткого прицепа.
2. Система помощи при движении задним ходом с прицепом по п. 1, дополнительно содержащая датчик скорости, измеряющий скорость транспортного средства, причем контроллер генерирует команду рулевого управления и команду активации на основании упомянутой скорости.
3. Система помощи при движении задним ходом с прицепом по п. 1, дополнительно содержащая датчик, измеряющий угол сцепки между прицепом и транспортным средством, причем команда рулевого управления генерируется на основании угла сцепки и длины прицепа.
4. Система помощи при движении задним ходом с прицепом по п. 1, в которой контроллер генерирует команду скорости для регулирования скорости движения транспортного средства задним ходом.
5. Система помощи при движении задним ходом с прицепом по п. 1, в которой команда активации для тормозной системы включает в себя независимое торможение колеса прицепа, расположенного с внутренней стороны траектории с желаемой кривизной.
6. Система помощи при движении задним ходом с прицепом по п. 1, в которой команда активации для тормозной системы генерируется, когда расстояние перемещения назад для прицепа для достижения траектории с желаемой кривизной без команды активации превышает пороговое расстояние.
7. Система помощи при движении задним ходом с прицепом по п. 6, в которой пороговое расстояние определяется на основании длины прицепа, так что для большей длины это пороговое расстояние выше, чем для меньшей длины.
8. Система помощи при движении задним ходом с прицепом по п. 1, в которой устройство ввода рулевых команд включает в себя ручку, которая выполнена с возможностью поворачиваться между первым положением, соответствующим первой кривизне, и вторым положением, соответствующим второй кривизне, тем самым поворотное положение ручки задает траекторию с желаемой кривизной.
9. Способ выполнения движения задним ходом для прицепа с тормозной системой, содержащий этапы, на которых:
принимают траекторию с желаемой кривизной для прицепа устройством ввода рулевых команд;
измеряют угол сцепки между прицепом и транспортным средством датчиком угла сцепки и
обеспечивают контроллер, выполненный с возможностью:
генерировать команду рулевого управления для транспортного средства, чтобы направить прицеп по траектории с желаемой кривизной на основании угла сцепки; и
генерировать команду активации для тормозной системы, чтобы уменьшить расстояние перемещения назад для достижения траектории с желаемой кривизной, при этом команда активации для тормозной системы генерируется, когда расстояние перемещения назад для прицепа для достижения траектории с желаемой кривизной без команды активации превышает пороговое расстояние, и при этом пороговое расстояние определяется на основании длины прицепа, так что для большей длины это пороговое расстояние выше, чем для меньшей длины.
10. Способ по п. 9, дополнительно содержащий этап, на котором:
измеряют скорость транспортного средства датчиком скорости, при этом команду рулевого управления и команду активации генерируют на основании этой скорости.
11. Способ по п. 9, в котором команда активации для тормозной системы включает в себя независимое торможение одного колеса прицепа, расположенного с внутренней стороны траектории с желаемой кривизной.
12. Способ по п. 9, дополнительно содержащий этап, на котором:
генерируют команду скорости контроллером для регулирования выходной мощности силового агрегата транспортного средства.
13. Способ по п. 12, в котором команда скорости, команда рулевого управления и команда активации вместе выполнены с возможностью позволить достичь траектории с желаемой кривизной для первого прицепа при, по существу, таком же расстоянии перемещения назад, как и для второго более короткого прицепа.
14. Способ по п. 12, дополнительно содержащий этап, на котором:
сохраняют значения длины множества прицепов в памяти, причем команду скорости, команду рулевого управления и команду активации генерируют совместно для прицепа, присоединенного к транспортному средству, для достижения траектории с желаемой кривизной при, по существу, таком же расстоянии перемещения назад, как среднее расстояние перемещения назад для множества прицепов для достижения траектории с желаемой кривизной.
15. Способ по п. 9, в котором траекторию с желаемой кривизной определяют на основании поворотного положения ручки, которая выполнена с возможностью поворачиваться между множеством положений, соответствующих разным значениям кривизны.
16. Способ выполнения движения задним ходом для прицепа с транспортным средством, содержащий этапы, на которых:
обеспечивают траекторию с желаемой кривизной для прицепа и
генерируют команду рулевого управления для транспортного средства и команду активации для тормозной системы прицепа, чтобы направить прицеп по траектории с желаемой кривизной, при этом команда рулевого управления и команда активации выполнены с возможностью позволить достичь траектории с желаемой кривизной для первого прицепа при, по существу, таком же расстоянии перемещения назад, как и для второго более короткого прицепа.
17. Способ по п. 16, в котором команда рулевого управления включает в себя изменение угла поворота для управляемых колес транспортного средства и в котором команда активации включает в себя тормозное усилие для по меньшей мере одного колеса прицепа.
18. Способ по п. 16, в котором команду рулевого управления и команду активации генерируют так, чтобы предотвратить то, что угол сцепки между транспортным средством и прицепом превышает угол складывания, который определяется на основании длины прицепа и колесной базы транспортного средства.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Устройство для отливки колец | 1958 |
|
SU119315A1 |

