[0001] Представленные варианты осуществления относятся в целом к индивидуальным устройствам ухода и, в частности, к индивидуальному устройству ухода, имеющему самонастраивающееся амплитудное регулирование посредством нелинейности и активного регулирования возбуждения исполнительного устройства, и выполняемому им способу.
[0002] Резонансные, высокочастотные электронные зубные щетки обычно используются в быту потребителями. Один известный недостаток для некоторых потребителей состоит в том, что эти устройства могут создавать грязь при использовании в том случае, если они извлекают устройство из полости рта во время работы (например, разбрызгивание слюны или зубной пасты). Этот недостаток легко преодолим, когда потребитель привыкает к зубной щетке; однако переживания, полученные при виде разбрызганных по ванной комнате материалов, влияют на первоначальные впечатления о зубной щетке и могут способствовать решению не использовать продукт в качестве составной части регулярного ухода за полостью рта. Таким образом, существует необходимость в зубной щетке, в которой уменьшена вероятность и степень разбрызгивания, если потребитель использует устройство вне полости рта.
[0003] Зубная щетка с автоматическим приведением в действие, как описано в заявке на патент США US 20120246846 A1, является примером решения, исключающего разбрызгивание. Зубная щетка с автоматическим приведением в действие использует в конструкции емкостные датчики для обеспечения автоматического приведения в действие устройства, когда оно введено в полость рта. В известных зубных щетках емкостные датчики действуют в качестве переключателя ВКЛ/ВЫКЛ, устраняя необходимость в кнопке питания. Однако устранение кнопки питания посредством использования емкостных датчиков в известных зубных щетках не позволяет использовать нелинейную характеристику для обеспечения иной амплитуды при нахождении в полости рта нежели вне полости рта, и к тому же следует принять во внимание, что зубная щетка отключается, когда находится вне полости рта.
[0004] Потребители, особенно те, которые привыкли использовать ручные зубные щетки, обычно проходят период привыкания, когда они используют электронную зубную щетку в первый раз. Для многих из этих потребителей грязь, создаваемая электронной зубной щетки (например, разбрызгивание), может представлять собой недостаток использования высокочастотной резонансной электронной зубной щетки. Кроме того, такой опыт применения может снижать вероятность использования этого устройства в качестве составной части регулярной чистки зубов и/или может спровоцировать решение не использовать электронную зубную щетку вообще.
[0005] Соответственно, требуется способ и устройство для преодоления данных проблем.
[0006] Согласно одному аспекту настоящего изобретения индивидуальное устройств ухода содержит резонансную электронную зубную щетку с нелинейной амплитудно-частотной характеристикой и самонастраивающимся амплитудным регулированием. Индивидуальное устройство ухода автоматически уменьшает мощность в момент удаления из полости рта и автоматически увеличивает мощность при работе в полости рта. Автоматическое снижение мощности преимущественно уменьшает количество материала, разбрызгиваемого при работе вне полости рта, в отличие от случая полной мощности. Резонансная электронная зубная щетка также автоматически увеличивает мощность для достижения требуемого очищающего эффекта в ответ на работу внутри полости рта, то есть при полной мощности. Соответственно, варианты осуществления преимущественно улучшают потребительский опыт.
[0007] Согласно другому аспекту индивидуальное устройство ухода содержит электронную зубную щетку, которая преодолевает недостатки известной зубной щетки с автоматическим приведением в действие, как описано выше в настоящем документе, при этом известная зубная щетка исключает необходимость в кнопке питания посредством использования емкостных датчиков. И наоборот, что касается электронной зубной щетки, варианты осуществления настоящего изобретения включены во время использования и используют нелинейную амплитудно-частотную характеристику двигателя зубной щетки для обеспечения иной амплитуды в полости рта, нежели вне полости рта.
[0008] Кроме того, согласно другому аспекту настоящего изобретения электронная зубная щетка выполнена с возможностью работы таким образом. что мощность значительно снижается, если она используется вне полости рта, что преимущественно не допускает или значительно уменьшает образование брызг и позволяет улучшить первоначальное впечатление потребителей, особенно потребителей, незнакомых с использованием высокочастотных резонансных зубных щеток.
[0009] Согласно одному аспекту индивидуальное устройство ухода, обладающее самонастраивающимся амплитудным регулированием в ряду множества различных характеристических состояний нагрузки, содержит исполнительное устройство, датчик тока и контроллер. Исполнительное устройство включает в себя подвижный вал, предназначенный для резонансного перемещения в ответ на сигнал возбуждения и для соединения с рабочим элементом, например, чистящей головкой. Исполнительное устройство дополнительно выполнено с возможностью работы в соответствии с нелинейной характеристикой амплитуды перемещения о частоты. Контроллер соединен с исполнительным устройством посредством датчика тока, предназначенного для отслеживания тока возбуждения. Контроллер выполнен с возможностью (i) обнаруживать по меньшей мере одно из множества различных характеристических состояний нагрузки в ответ на изменение отслеживаемого тока возбуждения и (ii) активно подавать сигнал возбуждения на исполнительное устройство. Активно поданный сигнал возбуждения выбирается из по меньшей мере из двух различных сигналов возбуждения в зависимости от обнаруженного характеристического состояния нагрузки из множества различных характеристических состояний нагрузки для осуществления самонастраивающегося амплитудного регулирования резонансного перемещения подвижного вала из множества различных характеристических состояний нагрузки. Множество различных характеристических состояний нагрузки включает в себя одно или более дополнительных нагрузок в виде силы, пружины, массы и демпфирования для получения заданного состояния нагрузки резонансной пружинно-массовой системы исполнительного устройства, соединенного с рабочим элементом.
[0010] Согласно другому аспекту резонансное перемещение содержит по меньшей мере одно из поворотного резонансного перемещения и поступательного резонансного перемещения. В одном варианте осуществления поворотное резонансное перемещение включает в себя (i) первую амплитуду угла поворота в диапазоне 4 градуса или менее и (ii) вторую амплитуду угла поворота в диапазоне 8-12 градусов.
[0011] Согласно другому аспекту каждый сигнал возбуждения содержит прямоугольный сигнал, имеющий частоту и коэффициент заполнения. В одном варианте осуществления контроллер (i) активно подает первый сигнал возбуждения на исполнительное устройство в ответ на обнаружение характеристического состояния нагрузки, соответствующего состоянию вне полости рта, (ii) активно подает второй сигнал возбуждения на исполнительное устройство в ответ на обнаружение характеристического состояния нагрузки, соответствующего одному или более из (ii)(a) состояния начального контакта с полостью рта, (ii)(b) состояния смещения в полости рта, при котором амплитуда резонансного перемещения подвижного вала автономно увеличивается до амплитуды полной мощности на рабочей частоте второго сигнала возбуждения посредством использования нелинейной амплитудно-частотной характеристики исполнительного устройства, (ii)(c) демпфированного состояния в полости рта, и (ii)(d) состояния после выведения из полости рта, и (iii) активно подает первый сигнал возбуждения на исполнительное устройство в ответ на a повторное обнаружение характеристического состояния нагрузки, соответствующего состоянию вне полости рта.
[0012] В одном варианте осуществления частота первого сигнала возбуждения включает в себя собственную частоту, а частота второго сигнала возбуждения включает в себя рабочую частоту, при этом собственная частота отличается от рабочей частоты. В другом варианте осуществления собственная частота содержит частоту, на которой имеется место максимальная чувствительность тока в амплитудно-частотной характеристике исполнительного устройства. В еще одном варианте осуществления рабочая частота содержит частоту в диапазоне 200-300 Гц, подходящую для получения требуемой эффективности очистки посредством рабочего элемента.
[0013] Согласно другому варианту осуществления прямоугольный сигнал первого сигнала возбуждения включает в себя первый коэффициент заполнения, а прямоугольный сигнал второго сигнала возбуждения включает в себя второй коэффициент заполнения, отличный от первого коэффициента заполнения. Например, первый коэффициента заполнения может находиться в диапазоне от 10:90 до 30:70, соответствуя диапазону 10-30 процентов во включенном состоянии и диапазону 90-70 процентов в выключенном, соответственно, для каждого из участка положительной полярности и участка отрицательной полярности первого сигнала возбуждения. Кроме того, второй коэффициент заполнения может находиться в диапазоне от 90:10 до 70:30, соответствуя диапазону 90-70 процентов во включенном состоянии и диапазону 10 -30 процентов в выключенном состоянии, соответственно, для каждого из участка положительной полярности и участка отрицательной полярности второго сигнала возбуждения.
[0014] Согласно еще одному варианту осуществления способ самонастраивающегося амплитудного регулирования по множеству различных характеристических состояний нагрузки для индивидуального устройства ухода включает в себя этап, на котором обеспечивают исполнительное устройство, имеющее подвижный вал, предназначенный для резонансного перемещения в ответ на сигнал возбуждения и для соединения с рабочим элементом. Исполнительное устройство выполнено с возможностью работы в соответствии с нелинейной характеристикой зависимости амплитуды перемещения от частоты. Резонансное перемещение содержит по меньшей мере одно из поворотного резонансного перемещения и поступательного резонансного перемещения. Кроме того, способ включает в себя этап, на котором отслеживают, посредством датчика тока, ток возбуждения сигнала возбуждения, подаваемый на исполнительное устройство, и обнаруживают, посредством контроллера, соединенного с исполнительным устройством и датчиком тока, по меньшей мере одно из множества различных характеристических состояний нагрузки в ответ на изменение в отслеживаемом токе возбуждения. Способ дополнительно включает в себя этап, на котором активно подают, посредством контроллера, на исполнительное устройство сигнал возбуждения, выбранный по меньшей мере из двух различных сигналов возбуждения в зависимости от обнаруженного характеристического состояния нагрузки из множества различных характеристических состояний нагрузки для выполнения самонастраивающегося амплитудного регулирования резонансного перемещения подвижного вала по множеству различных характеристических состояний нагрузки.
[0015] Дополнительное преимущества и выгоды станут очевидны специалисту в данной области техники после прочтения и понимания нижеприведенного подробного описания.
[0016] Варианты осуществления настоящего изобретения могут принимать вид различных компонентов и компоновок компонентов, а также различных этапов и компоновок этапов. Соответственно, чертежи предназначены для иллюстрации различных вариантов осуществления и не должны истолковываться как ограничивающие варианты осуществления. На чертежах подобные номера ссылочных позиций относятся к подобным элементам. Кроме того, следует заметить, что чертежи могут быть выполнены не в масштабе.
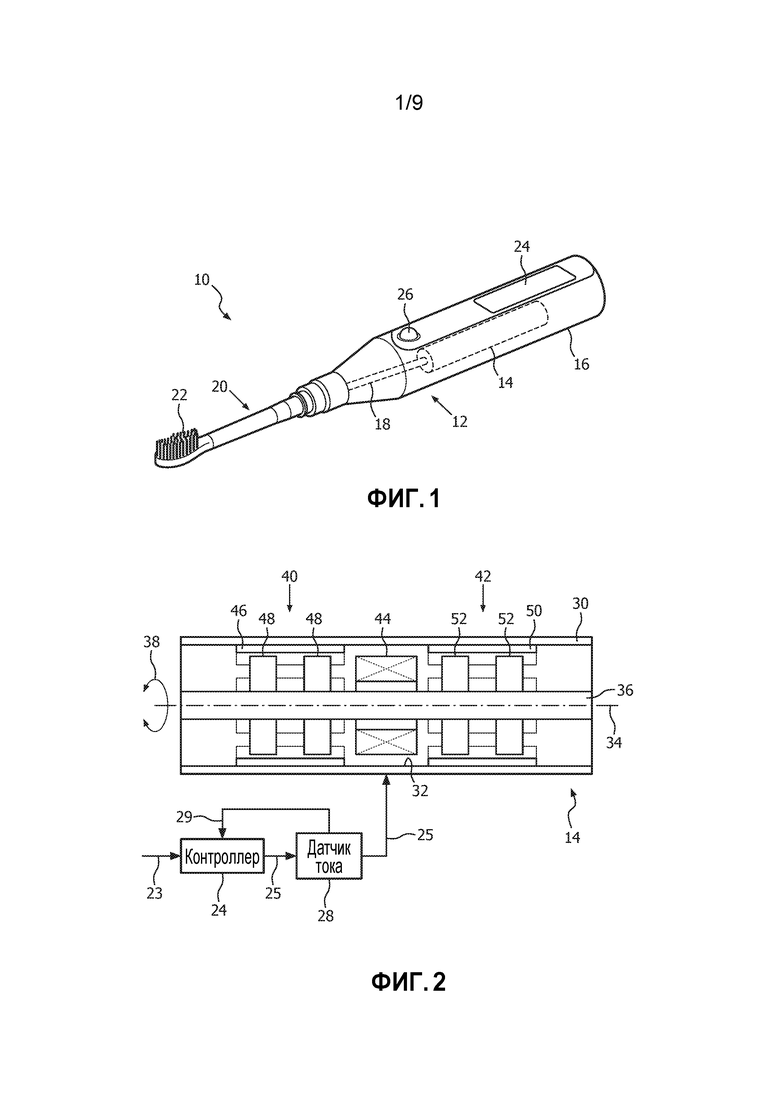
[0017] Фиг.1 - вид в перспективе индивидуального устройства ухода, имеющего самонастраивающееся амплитудное регулирование посредством нелинейности и активного регулирования возбуждения исполнительного устройства согласно варианту осуществления настоящего изобретения;
[0018] фиг.2 - схематичное изображение исполнительного устройства в поперечном разрезе, контроллера и датчика тока индивидуального устройства ухода согласно варианту осуществления настоящего изобретения;
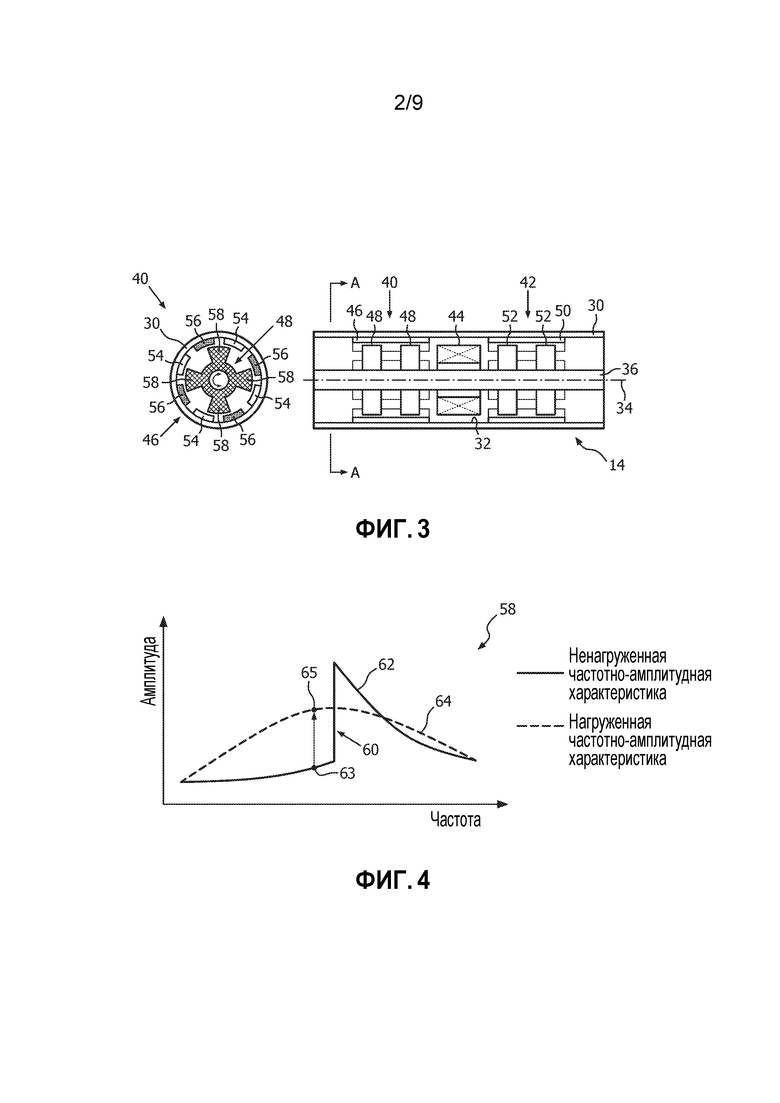
[0019] фиг.3 вид в поперечном разрезе магнитно-полюсного блока исполнительного устройства, включающий в себя вид в разрезе по линии A-A индивидуального устройства ухода согласно варианту осуществления настоящего изобретения;
[0020] фиг.4 - амплитудно-частотная характеристика исполнительного устройства, представленного на фиг.1, иллюстрирующая нелинейность амплитудно-частотной кривой для характеристики без нагрузки и иллюстрирующая изменение формы амплитудно-частотной кривой при наличии приложенной нагрузки (то есть, для характеристики с нагрузкой) согласно варианту осуществления настоящего изобретения;
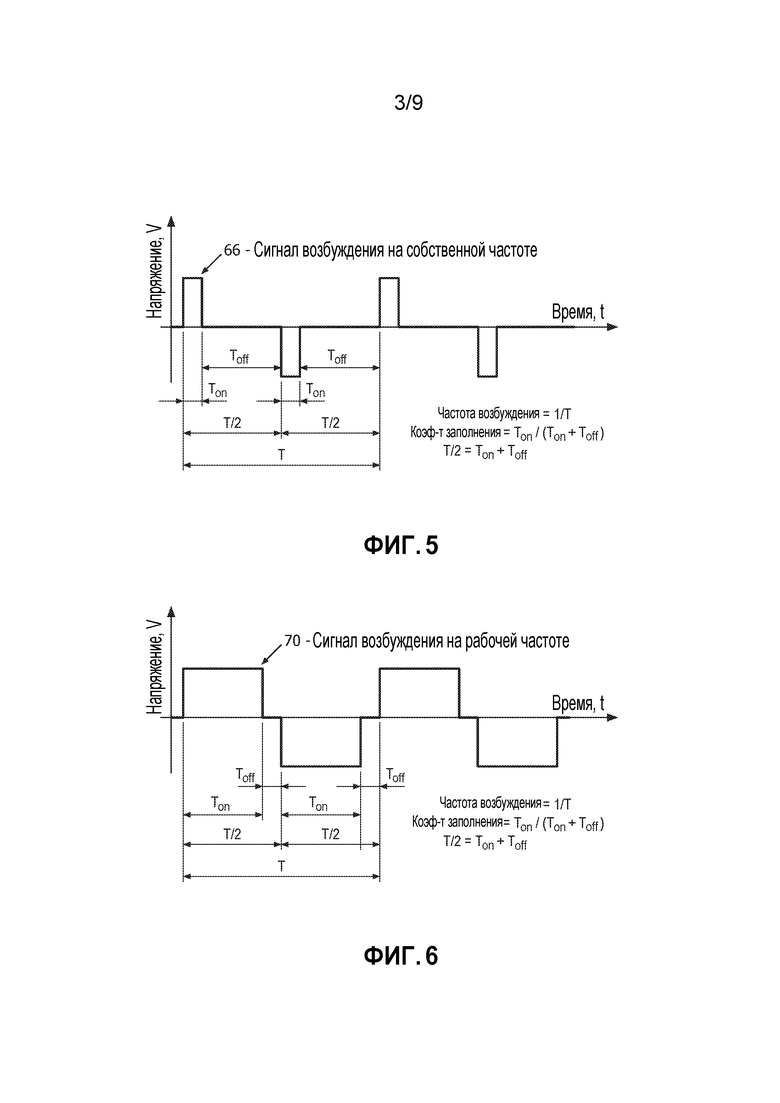
[0021] фиг.5 - график зависимости напряжения от времени для сигнала возбуждения на собственной частоте, выводимого посредством контроллера индивидуального устройства ухода согласно варианту осуществления настоящего изобретения;
[0022] фиг.6 - график зависимости напряжения от времени для сигнала возбуждения на рабочей частоте, выводимого посредством контроллера индивидуального устройства ухода согласно варианту осуществления настоящего изобретения; и
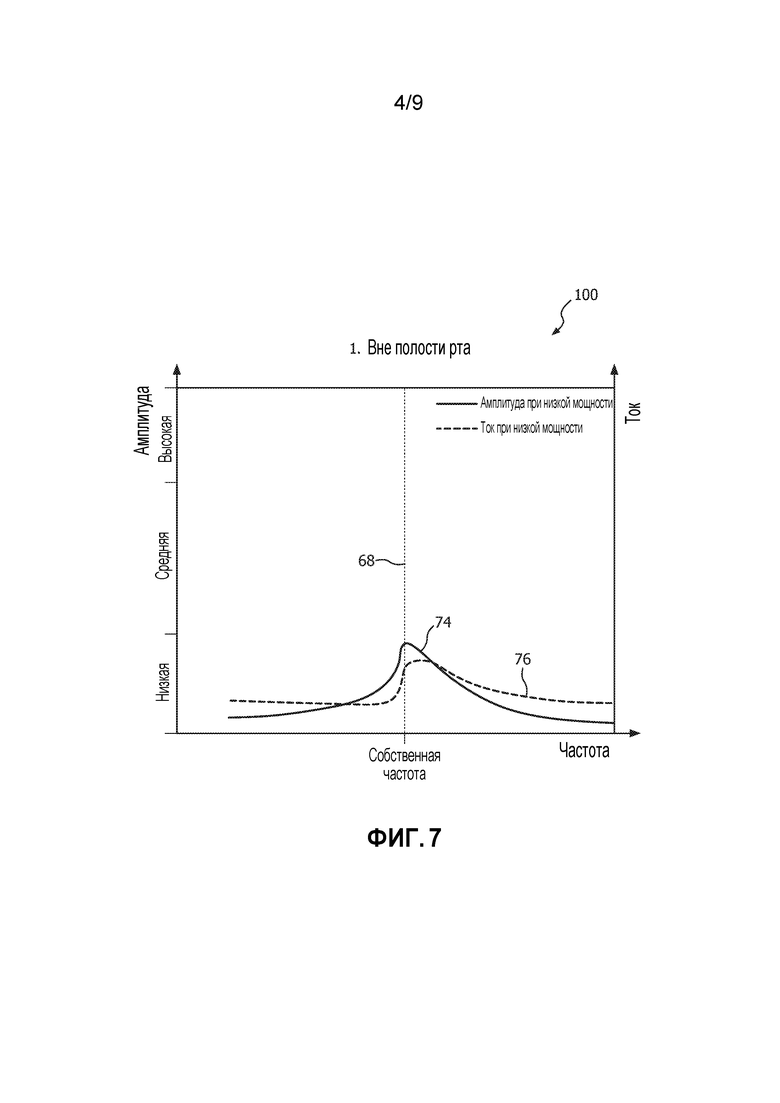
[0023] фиг.7-12 - кривые амплитудно-частотных характеристик исполнительного устройства, изображенного на фиг.1, иллюстрирующие множество различных характеристических состояний нагрузки индивидуального устройства ухода, подлежащих обнаружению согласно варианту осуществления настоящего изобретения.
[0024] Варианты осуществления настоящего изобретения и его различные признаки и преимущественные подробности объяснены более подробно со ссылкой на неограничивающие примеры, которые описаны и/или проиллюстрированы на чертежах и детализированы в нижеследующем описании. Следует заметить, что признаки, проиллюстрированные на чертежах, не обязательно приведены в масштабе, и признаки одного варианта осуществления могут использоваться с другими вариантами осуществления, как станет понятно специалисту в данной области техники, даже если это в явной форме не указано в настоящем документе. Описания хорошо известных компонентов и способов обработки могут быть опущены, чтобы чрезмерно не затруднять понимание вариантов осуществления настоящего изобретения. Примеры, использованные в настоящем документе, предназначены только для облегчения понимания способов практического осуществления вариантов осуществления и для обеспечения возможности дальнейшего его практического применения специалистами в данной области техники. Соответственно, примеры, приведенные в настоящем документе, не должны истолковываться как ограничивающие объем вариантов осуществления настоящего изобретения, которое ограничивается исключительно приложенной формулой и применяемым законом.
[0025] Следует понимать, что варианты осуществления настоящего изобретения не ограничиваются конкретными методиками, протоколами, устройствами, аппаратами, материалами, применениями и т.д., описанными в настоящем документе, поскольку они могут быть различными. Также следует понимать, что терминология, использованная в настоящем документе, используется с целью описания только частных вариантов осуществления, и не предназначена для ограничения объема вариантов осуществления, определяемого формулой. Следует помнить, что при использовании в настоящем документе и приложенной формуле формы единственного числа включают в себя множественное, если из контекста явно не следует иное.
[0026] Если не указано иное, все технические и научные термины, использованные в настоящем документе, имеют те же значения, какие обычно понимаются специалистом в данной области техники, к которой относятся варианты осуществления настоящего изобретения. Описаны предпочтительные способы, устройства и материалы, хотя в практических и исследуемых вариантах осуществления могут использоваться любые способы и материалы, аналогичные или эквивалентные описанным в настоящем документе.
[0027] Как описано в настоящем документе, варианты осуществления настоящего изобретения основаны на использовании резонансной системы, которая обладает выраженной нелинейностью своей амплитудно-частотной характеристики в отсутствии нагрузки и которая принимает более линейную характеристику в присутствии нагрузки (то есть, силы, массы, демпфирования и пружины). В одном варианте осуществления при приложении нагрузки индивидуальное устройство ухода (например, электронная зубная щетка) управляется для работы на рабочей частоте, несколько меньшей, чем собственная частота, при которой демонстрируется отклонение от линейного закона (низкая амплитуда) в ненагруженном состоянии. Далее в ответ на приложение нагрузки частотно-амплитудные характеристики резонансной системы (например, исполнительного устройства) изменяются посредством самонастраивающегося амплитудного регулирования, приводящего к возрастанию амплитуды, тем самым извлекая пользу их нелинейных амплитудно-частотных характеристик резонансной системы. При снятии нагрузки индивидуальное устройство ухода активно приводится в действие или управляется для возвращения в исходное ненагруженное состояние на собственной частоте, и амплитуды значительно уменьшается.
[0028] На фиг.1 проиллюстрирован вид в перспективе индивидуального устройства 10 ухода, имеющего самонастраивающееся амплитудное регулирование посредством нелинейности и активного регулирования возбуждения исполнительного устройства согласно варианту осуществления настоящего изобретения. Индивидуальное устройство 10 ухода содержит систему привода, в целом обозначенную ссылочной позицией 12, включающую в себя исполнительное устройство 14. В одном варианте осуществления индивидуальное устройство 10 ухода содержит резонансную электронную зубную щетку. Исполнительное устройство 14 в целом расположено в ручке 16 индивидуального устройства 10 ухода. Исполнительное устройство 14 использует резонансное магнитное действие для приведения в действие выходного установочного стерженя 18, на котором установлен рабочий элемент 20, например, чистящая головка с щетинками 22 для электронной зубной щетки. Индивидуальное устройство ухода дополнительно содержит контроллер 24 и средство 26 включения/выключения устройства, например, посредством реального или виртуального переключателя или другого подходящего механизма ВКЛ /ВЫКЛ для данного осуществления устройства. В одном режиме работы в ответ на включение устройства посредством средства 26 контроллер 24 подает соответствующий сигнал возбуждения на исполнительное устройство 14, как описано далее в настоящем документе.
[0029] На фиг.2 представлено схематическое изображение исполнительного устройства 14 в поперечном разрезе, контроллер 24 и датчик 28 тока исполнительного устройства ухода 10 согласно варианту осуществления настоящего изобретения. Контроллер 24 может включать в себя один или более подходящих микропроцессоров, микроконтролеры или другой тип управляющего устройства. В одном варианте осуществления контроллер 24 выполнен с возможностью подачи поворотного сигнала возбуждения посредством линии передачи сигнала(ов) 25 на исполнительное устройство 14 согласно конкретным требованиям для данного осуществления индивидуального устройства ухода. Например, поворотные сигналы возбуждения могут быть выполнены с возможностью обеспечения множества движений исполнительного устройства и/или рабочих режимов для индивидуального устройства 10 ухода, как описано далее в настоящем документе. Контроллер 24 может также принимать сигнал ВКЛ/ВЫКЛ или любой другой подходящий сигнал активации, например, по линии 23 передачи входных сигналов.
[0030] На фиг.2 датчик 28 тока подключен между выходом сигнала возбуждения контроллера 24 и входом сигнала возбуждения исполнительного устройства 14. Датчик 28 тока содержит любой подходящий датчик или компонент для использования в отслеживании тока возбуждения сигнала возбуждения, выводимого посредством контроллера 24 и подаваемого на исполнительное устройство 14. Ток возбуждения, обнаруженный датчиком 28 тока, подается обратно, например, посредством линии 29 передачи сигналов на контроллер 24 для отслеживания изменений тока возбуждения, как рассмотрено далее в настоящем документе.
[0031] На фиг.2 в одном варианте осуществления исполнительное устройство 14 содержит цилиндрический корпус 30 из магнитного материала, имеющий внутреннюю цилиндрическую поверхность 32 и главную ось 34, проходящую вдоль его длины. Исполнительное устройство дополнительно содержит вал 36 из намагничиваемого материала, проходящий продольно в корпусе 30 вдоль главной оси 34. Вал 36 механически соединен, посредством подшипников или других подходящих средств, известных из уровня техники (не представлено), с корпусом 30. В результате вал 36 может демонстрировать поворотное движение 38 вала относительно корпуса 30, которое передается на выходной установочный стержень 18 посредством любого подходящего соединения с валом 36. Как рассмотрено далее в настоящем документе, движение 38 вала 36, и, таким образом. движение стержня 18, управляется способом, содержащим резонансное перемещение.
[0032] На фиг.2 и фиг.3 тангенциальное исполнительное устройство 14 содержит (i) первый постоянный магнитно-полюсный блок 40, (ii) второй постоянный магнитно-полюсный блок 42 и (iii) электромагнитную катушку 44 (или обмотку электромагнитной катушки). Первый постоянный магнитно-полюсный блок 40 может содержать первый магнитный блок 46 и первый полюсный блок 48, который может включать в себя более одного полюсного блока (например, представлено два полюсных блока). Аналогично, второй постоянный магнитно-полюсный блок 42 может содержать второй магнитный блок 50 и второй полюсный блок 52, который может включать в себя более одного полюсного блока (например, представлено два полюсных блока). Электромагнитная катушка 44 (или обмотка электромагнитной катушки) расположена вокруг вала 36 и соединена с валом 36 посередине между первым и вторым магнитными и полюсными блоками, 40 и 42, соответственно.
[0033] На фиг.3 представлен вид в поперечном разрезе магнитно-полюсного блока 40 участка исполнительного устройства 14, разрез выполнен по линии A-A. Как проиллюстрировано, постоянный магнитно-полюсный блок 40 включает в себя множество N-полярных и S-полярных магнитов, указанных, соответственно, ссылочными позициями 54 и 56, и имеющих первый порядок полярности. В одном варианте осуществления множество N-полярных и S-полярных магнитов содержит восемь (8) магнитов одинакового размера и расположенных с равными промежутками (то есть, расположение N-магнита и S-магнита с равными промежутками), по внутренней цилиндрической поверхности 32 корпуса 30. Каждый N-полярный магнит 54 и S-полярный магнит 56 дополнительно расположен продольно на указанной внутренней цилиндрической поверхности 32 корпуса 30, то есть направлен перпендикулярно странице чертежа. Магнитно-полюсный блок 40 дополнительно включает в себя полюсный блок 48, имеющий четыре (4) полюсных элемента, указанных ссылочной позицией 58, имеющих одинаковый размер и расположенных с равными промежутками радиально вокруг вала 36. При такой конфигурации тангенциальное исполнительное устройство 14 имеет эффективное обжимное положение, которое обеспечивает амплитудно-частотную характеристику тангенциального исполнительного устройства. Возможны также другие конфигурации тангенциального исполнительного устройства 14, согласно требованиями осуществления данного индивидуального устройства ухода.
[0034] Второй постоянный магнитно-полюсный блок 42 участка исполнительного устройства 14 аналогичен первому постоянному магнитно-полюсному блоку 40 с нижеприведенными отличиями. Второй постоянный магнитно-полюсный блок 42 содержит второе множество 50 S-полярных и N-полярных магнитов и имеет второй порядок полярности, противоположный первому порядку полярности. Кроме того, каждый отдельный магнитный сегмент второго множества расположен продольно вдоль внутренней цилиндрической поверхности корпуса 30. Второй постоянный магнитно-полюсный блок 42 исполнительного устройства 14 дополнительно содержит второй полюсный блок 52, имеющий второй набор полюсных элементов, аналогичных таковым элементам первого полюсного блока 48, расположенных радиально вокруг вала 36.
[0035] В ответ на поворотный управляющий сигнал возбуждения, приложенный к электромагнитной катушке 44 посредством контроллера 24 (фиг.2), исполнительное устройство 14 поворотно смещает вал 36 относительно корпуса 30 вокруг главной оси 34, и, таким образом, сообщает требуемое поворотное движение 38 валу 34. Требуемое поворотное движение может содержать, например, поворотное движение, имеющее полный размах амплитуды в диапазоне 8-12° или в другом диапазоне, подходящем для осуществления данного индивидуального устройства ухода, как рассмотрено далее в настоящем документе.
[0036] На фиг.4 представлена амплитудно-частотная характеристика 58 для резонансной пружинно-массовой системы, например, исполнительного устройства 14 (фиг.1-3). В частности, резонансная пружинно-массовая система выполнена таким образом, что система демонстрирует значительные нелинейные характеристики при работе в ненагруженном состоянии. Это может достигаться посредством использования нелинейной пружины. Для этого типа резонансной пружинно-массовой системы имеется большое увеличение амплитуды при небольшом изменении частоты. Большое изменение амплитуды при небольшом изменении частоты называется ʺнелинейностьюʺ 60 кривой 62 ʺхарактеристика без нагрузки ʺ на фиг.4. Кроме того, для этой резонансной пружинно-массовой системы форма амплитудно-частотной кривой 62 изменяется в присутствии приложенной нагрузки, то есть аналогично тому, как это происходит при нахождении во рту. Изменение в присутствии приложенной нагрузки отражены в кривой 64 ʺхарактеристика с нагрузкой ʺ на фиг.4. Согласно одному варианту осуществления авторы изобретения установили, что работа этой системы на частоте, несколько ниже ʺнелинейностиʺ 60 приводит к работе электронной зубной щетки с низкой амплитудой 63 без нагрузки (то есть, чистящая головка 20 находится вне полости рта) и со значительно большей амплитудой 65 при нагрузке (то есть чистящая головка 20 находится в полости рта).
[0037] Кроме того, авторы изобретения обнаружили, что ток возбуждения для резонансной пружинно-массовой системы индивидуального устройства ухода тесно связан с амплитудой резонансной пружинно-массовой системы. Ток возбуждения отслеживается, например, посредством датчика 28 тока (фиг.2) для обнаружения отклонений или изменений амплитуды. В контексте электронной зубной щетки, имеющей резонансную пружинно-массовую систему, когда амплитуда резонансной пружинно-массовой системы быстро уменьшается, это распознается как ситуация вне полости рта, и контроллер 24 для электронной зубной щетки уменьшает приводную мощность для еще большего замедления движения чистящей головки. Дальнейшее замедление движения чистящей головки, в ситуации вне полости рта, преимущественно не допускает разбрызгивания или расплескивания жидкостей, находящихся на чистящей головке 20. Кроме того, рабочая частота изменяется, посредством контроллера 24, до значения, при котором ток возбуждения обладает наивысшей чувствительностью к изменениям амплитуды, эта частота именуется в настоящем документе ʺСобственная частотаʺ. При этом состоянии зубная щетка работает в стабильном состоянии. Амплитуды и ток изменяются от стабильного состояния к нестабильному, когда чистящая головка 20 помещается обратно в полость рта. При улавливании соответствующего изменения частота возбуждения и мощность возвращаются обратно к обычным рабочим значениям посредством контроллера 24 для достижения требуемой для полости рта амплитуды для эффективной чистки. Это станет более понятно со ссылкой на фиг.5-12, которые относятся ко множеству различных характеристических состояний (100,102,104,106,108,110) нагрузки.
[0038] Указанное множество различных характеристической состояний нагрузки включает в себя одну или более дополнительных нагрузок силы, пружины, массы и демпфирования к данному состоянию нагрузки резонансной пружинно-массовой системы исполнительного устройства (14), соединенного с рабочим элементом (20). Следует заметить, что различные типы состояний нагрузки определяют, какие дополнительные нагрузки силы, пружины, массы и демпфирования приложены к данному состоянию нагрузки и влияют на него. Самонастраивающееся амплитудное регулирование резонансного перемещения (38) подвижного вала реализуется для множества различных характеристических состояний нагрузки, как объяснено с соответствующих описаниях, приведенных ниже в настоящем документе.
[0039] Как указано выше в настоящем документе, контроллер 24 предназначен для подачи поворотного сигнала возбуждения посредством линии 25 передачи сигнала(-ов) на исполнительное устройство 14, согласно конкретным требованиям данного осуществления индивидуального устройства ухода. Например, поворотные сигналы возбуждения могут быть выполнены с возможностью обеспечения многочисленных различных движений исполнительного устройства и/или режимов работы для индивидуального устройства 10 ухода. В одном варианте осуществления каждый сигнал возбуждения содержит прямоугольный сигнал, имеющий частоту и коэффициент заполнения. Как рассмотрено ниже в настоящем документе, контроллер (i) активно подает первый сигнал возбуждения на исполнительное устройство в ответ на обнаружение характеристического состояния нагрузки, соответствующего состоянию вне полости рта, (ii) активно подает второй сигнал возбуждения на исполнительное устройство в ответ на обнаружение характеристического состояния нагрузки, соответствующего одному или более из (ii)(a) состояния начального контакта с полостью рта, (ii)(b) состояния перемещения в полости рта, (ii)(c) заторможенного состояния в полости рта, и (ii)(d) состояния выведения из полости рта, и (iii) активно подает первый сигнал возбуждения на исполнительное устройство в ответ на обнаружение возврата в характеристическое состояние нагрузки, соответствующее состоянию вне полости рта.
[0040] В одном варианте осуществления каждый сигнал возбуждения содержит прямоугольный сигнал, имеющий частоту и коэффициент заполнения. Частота первого сигнала возбуждения включает в себя собственную частоту, а частота второго сигнала возбуждения включает в себя рабочую частоту. Собственная частота может отличаться от рабочей частоты. В одном варианте осуществления собственная частота может приблизительно на 20 Гц отличаться от рабочей частоты (например, на 20 Гц меньше или больше, чем рабочая частота), согласно требованиям данного варианта осуществления индивидуального устройства ухода. Кроме того, собственная частота содержит частоту, при которой существует наивысшая чувствительность тока на амплитудно-частотной характеристике исполнительного устройства. Кроме того, прямоугольный сигнал первого сигнала возбуждения включает в себя первый коэффициент заполнения, а прямоугольный сигнал второго сигнала возбуждения включает в себя второй коэффициент заполнения, отличный от первого коэффициента заполнения.
[0041] Фиг.5 - график зависимости напряжения от времени для сигнала 66 возбуждения (то есть, первого сигнала возбуждения) на собственной частоте, выводимого посредством контроллера 24 индивидуального устройства 10 ухода согласно варианту осуществления настоящего изобретения. Один пример собственной частоты обозначен ссылочной позицией 68 на фиг.7, 8 и 12. Сигнал 66 возбуждения на собственной частоте характеризуется соответствующей частотой возбуждения (то есть, 1/T, где T=период сигнала) и коэффициентом заполнения. Коэффициент заполнения представлен величиной Ton/(Ton+Toff), где (Ton+Toff )=T/2. Другими словами, коэффициент заполнения представляет собой долю включенного состояния к доле выключенного для каждого из участка положительной полярности и участка отрицательной полярности первого сигнала возбуждения. Коэффициент заполнения первого сигнала возбуждения может содержать коэффициент заполнения, выбранный согласно требованиям данного варианта осуществления индивидуального устройства ухода, дополнительно в сочетании с приводом низкой мощности, амплитудой при низкой мощности и/или низким током питания, как рассмотрено в настоящем документе. Например, коэффициент заполнения первого сигнала возбуждения может включать в себя коэффициент заполнения в диапазоне от 10:90 до 30:70, что соответствует установке привода низкой мощности. Также могут быть возможны другие значения коэффициента заполнения.
[0042] Фиг.6 - график зависимости напряжения от времени для сигнала 70 возбуждения (то есть второго сигнала возбуждения) на рабочей частоте, выводимого посредством контроллера 24 индивидуального устройства 10 ухода согласно варианту осуществления настоящего изобретения. Один пример рабочей частоты обозначен ссылочной позицией 72 на фиг.8-12. Сигнал 70 возбуждения на рабочей частоте характеризуется соответствующей частотой возбуждения (то есть, 1/T, где T=период сигнала) и коэффициентом заполнения. Коэффициент заполнения представлен величиной Ton/(Ton+Toff), где (Ton+Toff )=T/2. Другими словами, коэффициент заполнения представляет собой долю включенного к доле выключенного состояния для каждого из участка положительной полярности и участка отрицательной полярности второго сигнала возбуждения. Коэффициент заполнения второго сигнала возбуждения может содержать коэффициент заполнения, выбранный согласно требованиям данного варианта осуществления индивидуального устройства ухода, дополнительно в сочетании с приводом полной мощности, амплитудой при полной мощности и/или полным током питания, как рассмотрено в настоящем документе. Например, коэффициент заполнения второго сигнала возбуждения может включать в себя коэффициент заполнения в диапазоне от 70:30 до 90:10, соответствующем настройкам привода полной мощности. Также могут быть возможны другие значения коэффициента заполнения.
[0043] На фиг.7 проиллюстрированы характеристические кривые для состояния 100 вне полости рта. Состояние 100 вне полости рта соответствует состоянию ожидания. В состоянии ожидания контроллер 24 приводит в действие резонансную пружинно-массовую систему, то есть исполнительное устройство 14, с низкой приводной мощностью. В ответ на низкую приводную мощность резонансная пружинно-массовая система остается на низкой амплитуде (то есть, относительно амплитуды поворотного движения 38 вала 36 и чистящей головки 20). Например, низкая амплитуда может соответствовать поворотной угловой амплитуде в диапазоне 4 градуса или менее. Кроме того, контроллер 24 приводит в действие резонансную пружинно-массовую систему на частоте, соответствующей ʺСобственной частотеʺ 68. Как рассмотрено в настоящем документе, ʺСобственная частотаʺ 68 представляет собой частоту, на которой ток возбуждения имеет наибольший наклон на кривой амплитудно-частотной характеристики, и амплитуда является достаточно низкой для недопущения разбрызгивания текучих сред. На фиг.7 амплитуда при низкой мощности указана ссылочной позицией 74, а низкий ток возбуждения указан ссылочной позицией 76, причем каждая величина имеет соответственное значение на собственной частоте 68.
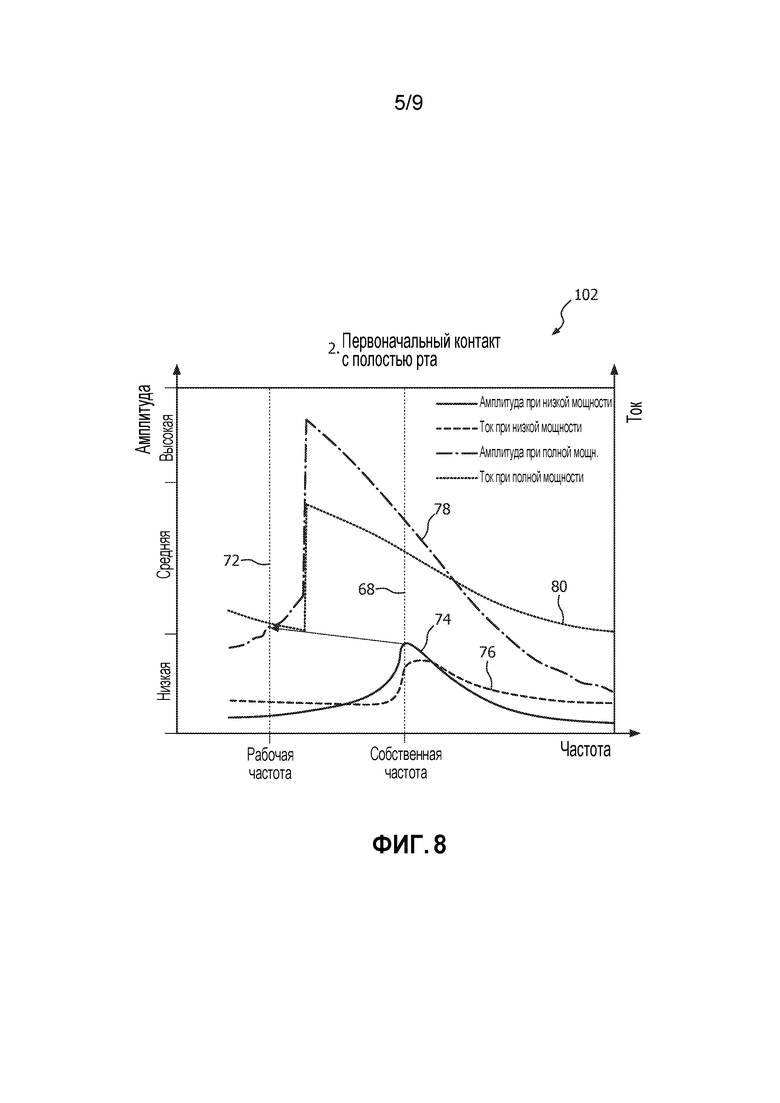
[0044] На фиг.8 проиллюстрированы характеристические кривые для состояния 102 начального контакта с полостью рта. Состояние 102 начального контакта с полостью рта соответствует состоянию обнаружения. При работе без нагрузки величина приводного тока является вполне стабильной. Однако, при введении чистящей головки 20 в полость рта кривые тока системы смещаются и/или деформируются. Изменения из-за первоначального контакта с полостью рта могут быть легко обнаружены по току, поскольку собственная частота 68 возбуждает систему в точке, в которой имеется наивысшая токовая чувствительность. В ответ на обнаружение изменения контроллер 24 приводит в действие резонансную масс-пружинную систему (то есть, исполнительное устройство 14) от собственной частоты 68 с низкой приводной мощностью к рабочей частоте 72 с полной приводной мощностью. Далее, в ответ на приведение в действие системы на рабочей частоте с полной приводной мощностью резонансная пружинно-массовая система переходит от низкой амплитуды к средней амплитуде (то есть, относительно амплитуды поворотного движения 38 вала 36 и чистящей головки 20). Например, средняя амплитуда может соответствовать поворотным угловым амплитудам в диапазоне между 4 и 8 градусами. На фиг.8 амплитуда при полной мощности указана ссылочной позицией 78, а ток при полной мощности указан ссылочной позицией 80, причем каждая величина имеет соответствующее значение на рабочей частоте 72.
[0045] Со ссылкой на фиг.8 следует заметить, что кривые 74-80 также могут использоваться для получения тех же результатов путем использования сигнала возбуждения со сдвинутым коэффициентом заполнения и постоянной частотой. Например, при поддержании сигнала возбуждения на одной частоте (например, собственной частоте 68) и коэффициента заполнения для низкой мощности получаются амплитуда 74 низкой мощности и ток 76 низкой мощности. Смещение коэффициента заполнения сигнала возбуждения до коэффициента заполнения для полной мощности при сохранении частоты (то есть, при собственной частоте 68) создает амплитуду 78 полной мощности и ток 80 полной мощности, причем каждая величина имеет соответствующее значение на собственной частоте 68. Соответственно, варианты осуществления настоящего изобретения могут включать в себя контроллер 24, поддерживающий сигнал 25 возбуждения исполнительного устройства на одной частоте, но при этом модулирующий сигнал возбуждения между коэффициентом заполнения для низкой мощности и коэффициентом заполнения для высокой мощности, в соответствии с требованиями данного осуществления индивидуального устройства ухода.
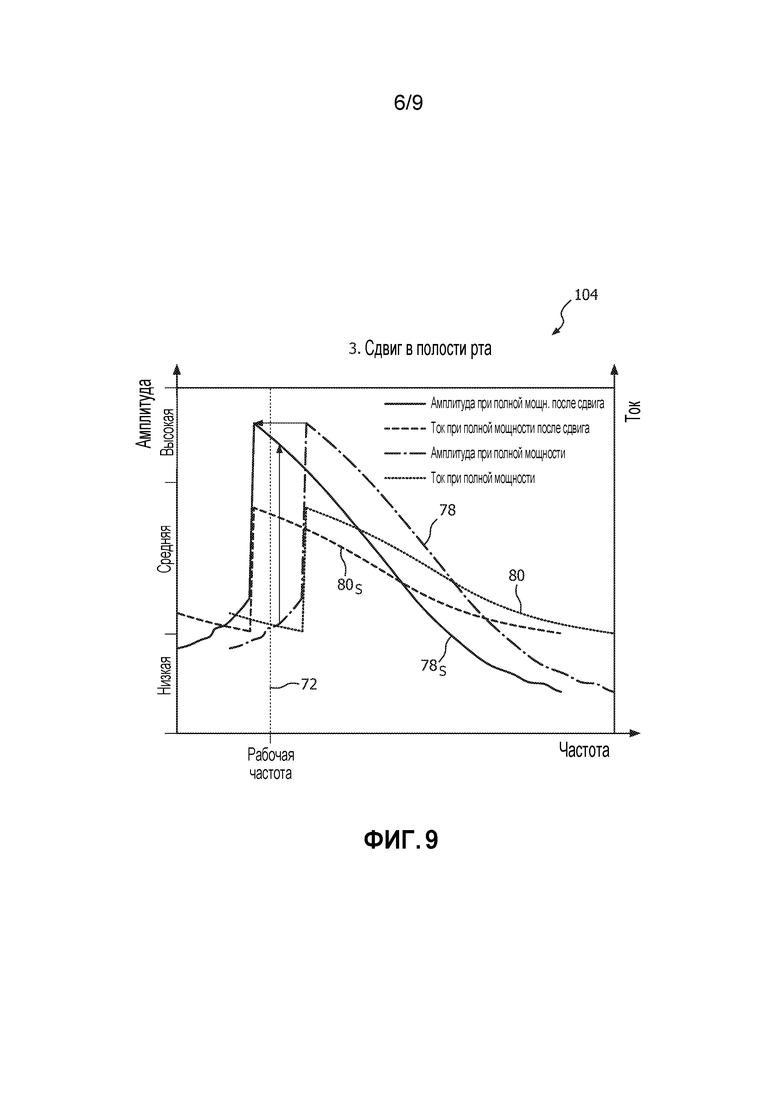
[0046] На фиг.9 проиллюстрированы характеристические кривые для состояния 104 смещения в полости рта. Состояние 104 смещения в полости рта соответствует состоянию сдвига. Среда, находящаяся в полости рта, например, вода, слюна, зубная паста и т.д. увеличивает инерционную массу (MOI - mass of inertia) чистящей головки 20, что смещает характеристические кривые амплитудно-частотной характеристики влево, то есть, в направлении низкой частоты. При сдвиге влево, как только точка скачка нелинейности характеристических кривых пройдет рабочую частоту 72, резонансная пружинно-массовая система (то есть, исполнительное устройство 14) сама переходит, в зависимости нелинейных амплитудно-частотных характеристик резонансной пружинно-массовой системы (то есть, исполнительного устройства 14), от средней амплитуды к высокой амплитуде (то есть, относительно амплитуды поворотного движения 38 вала 36 и чистящей головки 20). Например, высокая амплитуда может соответствовать поворотным угловым амплитудам в диапазоне более 12 градусов. Другими словами, как представлено, характеристические кривые для амплитуды 78 при полной мощности и тока 80 при полной мощности возникают в ответ на состояние начального контакта с полостью рта. В состоянии сдвига эти характеристические кривые переходят, посредством нелинейных амплитудно-частотных характеристик резонансной пружинно-массовой системы, к кривым для амплитуды при полной мощности после сдвига, указанной ссылочной позицией 78S, и тока при полной мощности после сдвига, указанного, соответственно, ссылочной позицией 80S, как проиллюстрировано на фиг.9, при этом каждая величина имеет соответствующее значение на рабочей частоте 72.
[0047] На фиг.9 следует заметить, что системный сдвиг, возникающий преимущественно в результате добавления инерционной массы (MOI), может влиять на работу индивидуального устройства ухода без регулирования коэффициента заполнения и/или рабочей частоты. Другими словами, по мере добавления большего количества MOI к характеристике нагрузки при данном состоянии нагрузки, кривые для амплитуды полной мощности после сдвига, указанные ссылочной позицией 78S, и тока полной мощности после сдвига, указанные ссылочной позицией 80S, продолжают сдвигаться в направлении низкой частоты до определенной степени. В результате каждая кривая имеет соответствующее значение на рабочей частоте 72, которое уменьшается в ограниченных пределах по мере увеличения сдвига в направлении низкой частоты.
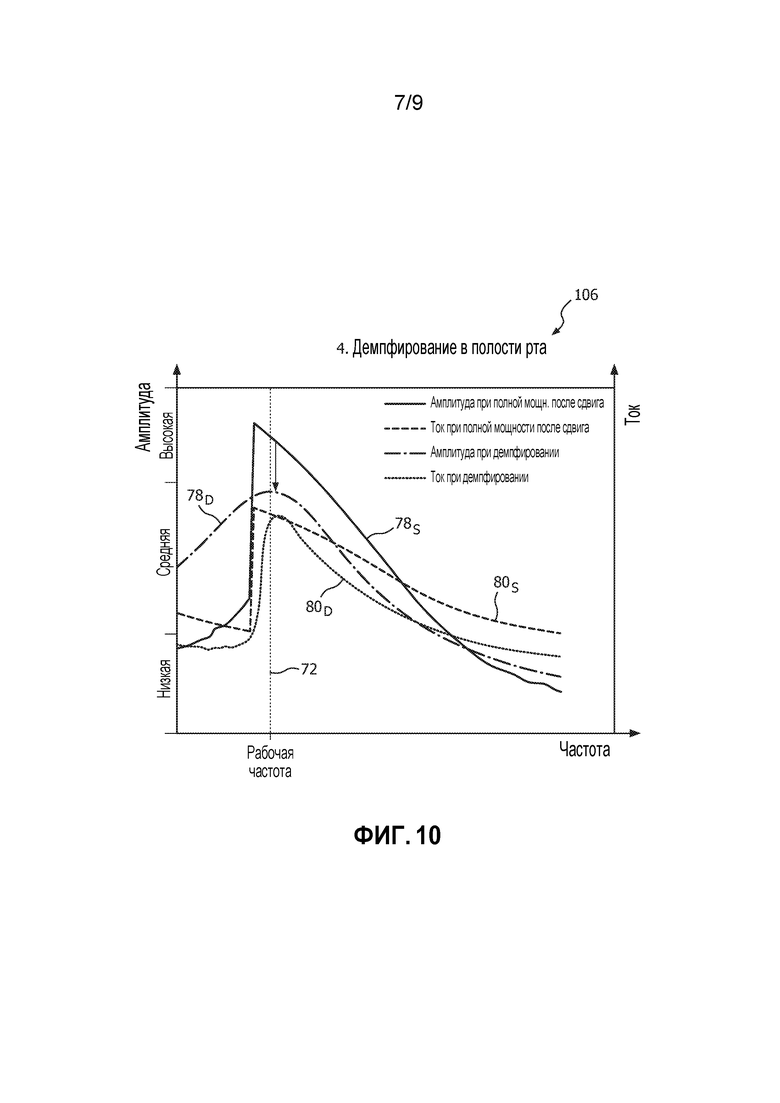
[0048] На фиг.10 проиллюстрированы характеристические кривые для демпфированного состояния 106 в полости рта. Демпфированное состояние 106 в полости рта соответствует демпфированному состоянию. Когда чистящая головка 20 находится в полости рта, внутриротовые текучие среды и мягкие ткани действуют в качестве демпфера для чистящей головки, что опускает характеристические кривые амплитудно-частотной характеристики и сглаживает их, то есть в направлении низкой амплитуды. Несмотря на сдвиг вниз резонансная пружинно-массовая система (то есть, исполнительное устройство 14), как функция нелинейного резонанса, переходит к средней амплитуде, которая является предпочтительной рабочей амплитудой. Как рассмотрено в настоящем документе, демпфированная амплитуда относится к амплитуде при полной мощности электронной зубной щетки на рабочей частоте 72, достаточной для обеспечения требуемой очищающей эффективности согласно вариантам осуществления настоящего изобретения. Другими словами, как представлено, характеристические кривые для амплитуды при полной мощности после сдвига 78S и ток при полной мощности после сдвига 80S возникают в ответ на состояние перемещения в полости рта. В демпфированном состоянии эти характеристические кривые переходят, соответственно, к кривым для демфированной амплитуды 78D и демфированного тока 80D, как проиллюстрировано на фиг.10, при этом каждая величина имеет соответствующее значение на рабочей частоте 72.
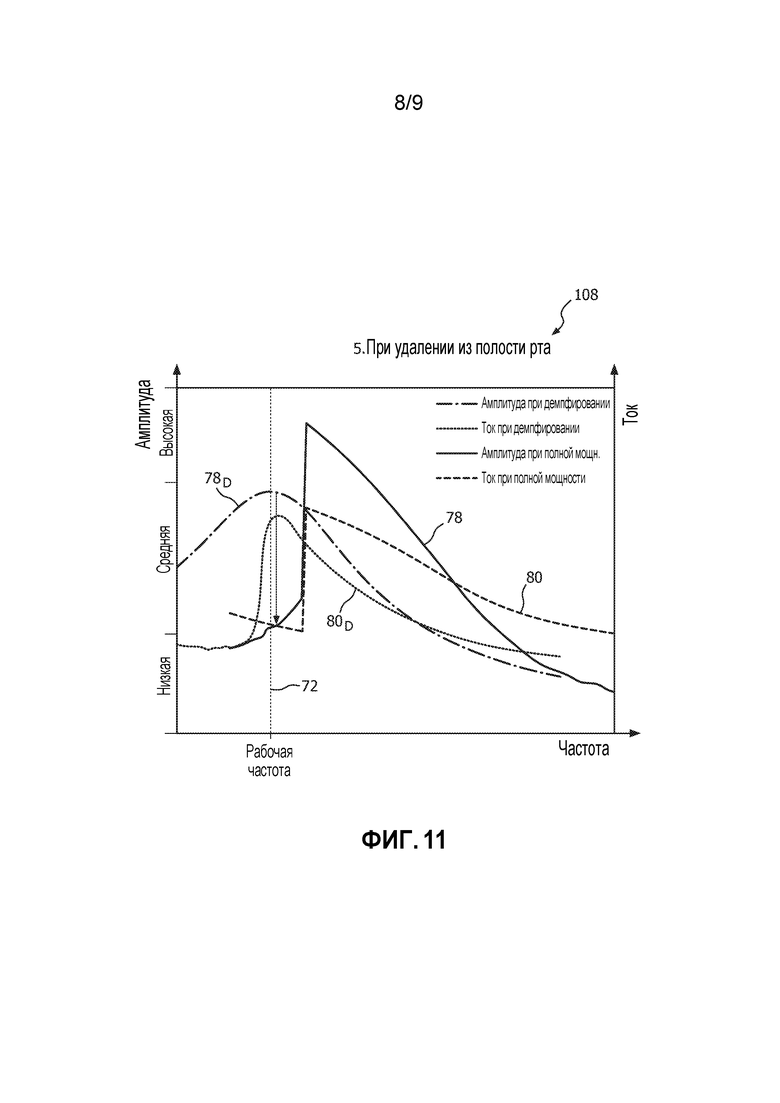
[0049] На фиг.11 проиллюстрированы характеристические кривые для состояния 108 после выведения из полости рта. Состояние 108 после выведения из полости рта соответствует состоянию вне полости рта. Выведение чистящей головки 20 из полости рта снимает внутриротовую нагрузку, дополнительную MOI и демпфирование, и, таким образом, возвращает резонансную пружинно-массовую систему (то есть, исполнительное устройство 14) в ненагруженное состояние. В ответ на переход системы из нагруженного в ненагруженное состояние резонансная пружинно-массовая система переходит, как функция нелинейного резонанса, от высокой амплитуды к средней амплитуде. Другими словами, характеристические кривые амплитудно-частотной характеристики резонансной пружинно-массовой системы переходят, соответственно, от демфированной амплитуды 78D и демфированного 80D к амплитуде 78 при полной мощности и току 80 при полной мощности, при этом каждая величина имеет соответствующее значение при рабочей частоте 72, как представлено на фиг. 11. Кроме того, резкое падение силы тока на рабочей частоте 72, а именно, от высокого до среднего, указывает, что чистящая головка 20 удалена из полости рта наружу.
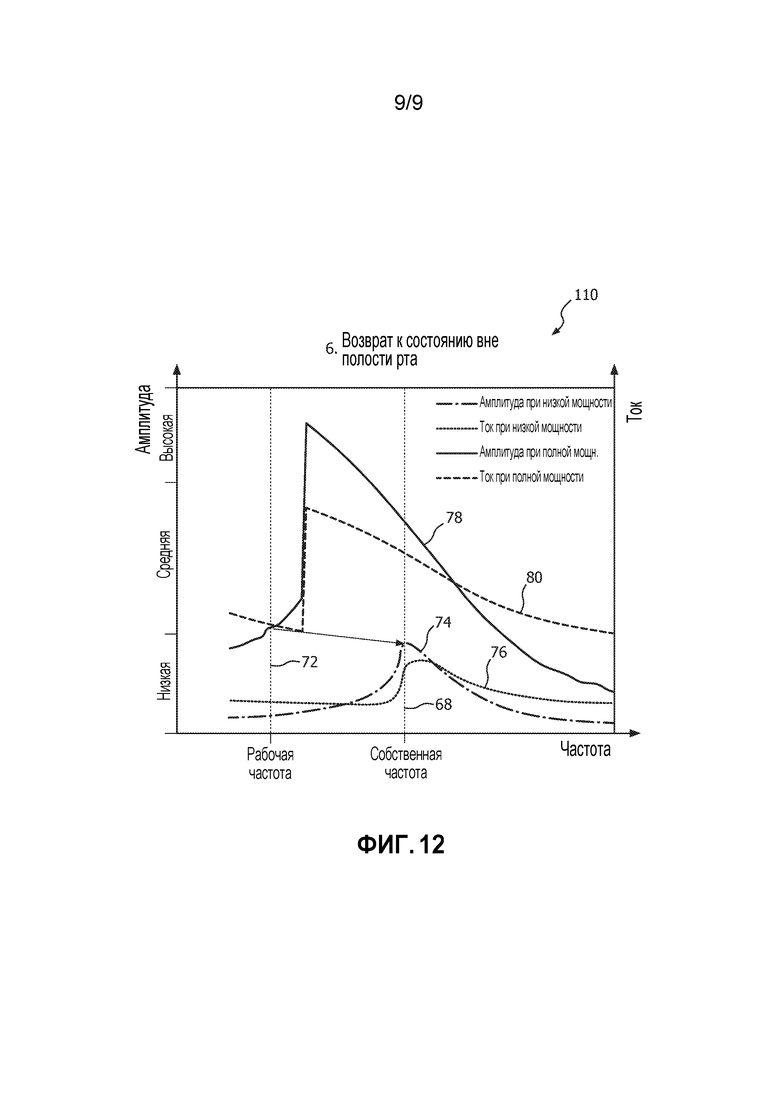
[0050] Со ссылкой на фиг.12 проиллюстрированы характеристические кривые для возврата к состоянию вне полости рта 110. Возврат к состоянию 110 вне полости рта соответствует возврату к состоянию ожидания. В этом состоянии обнаруживается резкое падение силы тока на рабочей частоте 72, а именно, изменение от высокого значения до среднего, что указывает, что чистящая головка удалена из полости рта наружу. В ответ на обнаружение изменения контроллер 24 приводит в действие резонансную масс-пружинную систему (то есть, исполнительное устройство 14) от рабочей частоты 72 с полной приводной мощностью до собственной частоты 68 с низкой приводной мощности. Далее, в ответ на приведение в действие системы на собственной частоте 68 с низкой приводной мощностью, резонансная пружинно-массовая система переходит от средней амплитуды к низкой амплитуде. Другими словами, как проиллюстрировано на фиг. 12, амплитуда 78 при полной мощности и ток 80 при полной мощности, где каждая величина имеет соответствующее значение на рабочей частоте 72, переходят, в ответ на сигнал возбуждения, выводимый посредством контроллера, к амплитуде 74 при низкой мощности и току 76 при низкой мощности, причем каждая величина имеет соответствующее значение на собственной частоте 68.
[0051] Со ссылкой на фиг. 12 следует заметить, что собственная частота 68 проиллюстрирована большей, чем рабочая частота 72. Однако в других вариантах осуществления собственная частота может быть меньше рабочей частоты или собственная частота может быть равна рабочей частоте согласно требованиям данного варианта осуществления индивидуального устройства ухода.
[0052] Как понятно из приведенного в настоящем документе изобретения, при работе без нагрузки значение тока возбуждения довольно стабильно. Однако для электронной зубной щетки при помещении чистящей головки в полость рта характеристические кривые резонансной масс-пружинной системы будут сдвинуты и/или деформированы. Изменения, из-за которых начальный контакт с полостью рта легко обнаруживается по току, поскольку собственная частота приводит в действие систему в точке, в которой имеется набольшая чувствительность к току. В ответ на обнаружение изменения контроллер переводит резонансную масс-пружинную систему от собственной частоты с низкой приводной мощностью к рабочей частоте с полной приводной мощностью. Далее в ответ на приведение в действие системы на рабочей частоте с полной приводной мощностью резонансная пружинно-массовая система переходит от низкой амплитуды к средней амплитуде. Затем нагрузка в полости рта и увеличение MOI приводят к самостоятельному сдвигу исполнительного устройства, в зависимости от нелинейных амплитудно-частотных характеристик исполнительного устройства, от средней амплитуды к высокой амплитуде. Затем возникает демпфирование при сохранении достаточной амплитуды на рабочей частоте для обеспечения требуемой очищающей эффективности. После выведения из полости рта и обнаружения резкого изменения силы тока, а именно, изменения от высокого значения к среднему, контроллер приводит в действие резонансную масс-пружинную систему от рабочей частоты с полной приводной мощностью к собственной частоте с низкой приводной мощностью. Далее, в ответ на приведение в действие системы на собственной частоте с низкой приводной мощностью резонансная пружинно-массовая система переходит от средней амплитуды к низкой амплитуде.
[0053] Хотя выше подробно описано только небольшое число примерных вариантов осуществления, специалистам в данной области техники легко понятно, что возможно множество модификаций примерных вариантов осуществления без значительного отступления от новых признаков и преимуществ вариантов осуществления настоящего изобретения. Например, хотя варианты осуществления, описанные в настоящем документе, относятся к электрической зубной щетке для уменьшения амплитуды вне полости рта относительно таковой в полости рта, варианты осуществления настоящего изобретения могут с выгодой использоваться в применениях при индивидуальной уходе за полостью рта, отличных от применений электрической зубной щетки, причем эти другие применения создают различие в амплитуде под нагрузкой и без нагрузки посредством нелинейных амплитудно-частотных характеристик резонансной системы. Соответственно, все такие модификации предназначены для включения в объем вариантов осуществления настоящего изобретения, как определено приложенной формулой. В формуле изобретения пункты, характеризующие средство плюс функцию, предназначены для охвата конструкций, описанных в настоящем документе, как выполняющих заявленную функцию, и не только конструкционные эквиваленты, но также эквивалентные конструкции.
[0054] Кроме того, никакие ссылочные позиции, стоящие в скобках в одном или более пунктах формулы, не должны истолковываться как ограничивающие формулу. Слова ʺсодержащийʺ, ʺсодержитʺ и подобные не исключаются наличия элементов и этапов, отличных от перечисленных в каком-либо пункте формулы или в описании в целом. Указание элемента в единственном числе не исключает множества таких элементов, и наоборот. Один или более вариантов могут быть реализованы посредством аппаратных средств, содержащих несколько отдельных элементов, и/или посредством надлежаще запрограммированного компьютера. В пункте формулы, относящегося к устройству, в котором перечисляется нескольких средств, некоторые из этих средств могут быть воплощены в одном или одном и том же элементе аппаратных средств. Тот факт, что некоторые признаки упоминаются во взаимно различных зависимых пунктах формулы, не означает, что сочетание этих признаков не может быть использовано для получения преимущества.
Изобретение относится к индивидуальным устройствам ухода. Индивидуальное устройство (10) ухода, выполненное с возможностью работы с самонастраивающимся амплитудным регулированием среди множества различных характеристических состояний (100,102,104,106,108,110) нагрузки, причем устройство содержит исполнительное устройство (14), имеющее подвижный вал (18), выполненный с возможностью резонансного перемещения (38) в ответ на сигнал (25) возбуждения и для соединения с рабочим элементом (20), при этом исполнительное устройство (14) дополнительно выполнено с возможностью работы в соответствии с нелинейной амплитудно-частотной характеристикой (58) зависимости амплитуды перемещения от частоты; датчик (28) тока для отслеживания тока возбуждения; и контроллер (24), соединенный с исполнительным устройством (14) через датчик (28) тока, при этом контроллер (24) (i) выполнен с возможностью обнаружения по меньшей мере одного из множества различных характеристических состояний (100,102,104,106,108,110) нагрузки в ответ на изменение отслеживаемого тока (29) возбуждения и (ii) с возможностью активной подачи сигнала (25) возбуждения на исполнительное устройство (14), выбранного из по меньшей мере двух различных сигналов возбуждения в зависимости от обнаруженного характеристического состояния нагрузки из множества различных характеристических состояний (100,102,104,106,108,110) нагрузки для осуществления самонастраивающегося амплитудного регулирования резонансного перемещения (38) подвижного вала среди множества различных характеристических состояний нагрузки, включающих в себя одну или более дополнительных нагрузок в виде силы, пружины, массы и демпфирования до заданного состояния нагрузки резонансной пружинно-массовой системы исполнительного устройства (14), соединенного с рабочим элементом (20); при этом в ответ на обнаружение характеристического состояния нагрузки, соответствующего состоянию (100) вне полости рта, контроллер (24) выполнен с возможностью активной подачи первого сигнала (66) возбуждения на исполнительное устройство (14) на собственной частоте и при относительно низкой проводной мощности, а в ответ на обнаружение характеристического состояния нагрузки, соответствующего другому из множества характеристических состояний (102, 104, 106, 108, 110) нагрузки, контроллер (24) выполнен с возможностью активной подачи второго сигнала (70) возбуждения на исполнительное устройство (14) на рабочей частоте и при относительно высокой приводной мощности. Техническим результатом изобретения является создание усовершенствованного индивидуального устройства ухода. 2 н. и 12 з.п. ф-лы, 12 ил.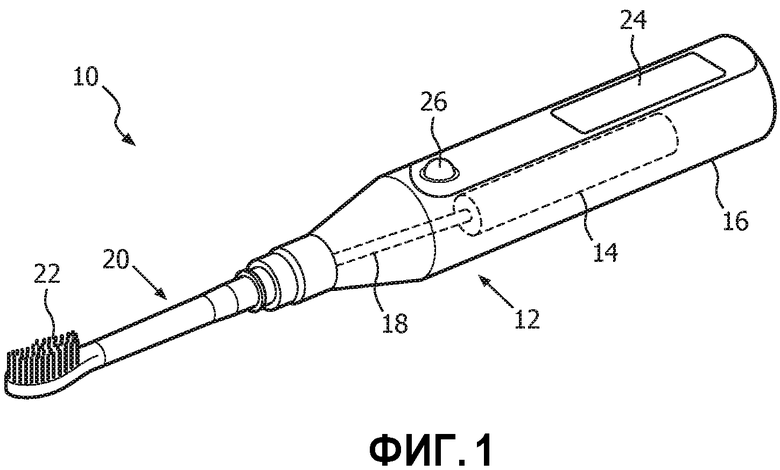
1. Индивидуальное устройство (10) ухода, выполненное с возможностью работы с самонастраивающимся амплитудным регулированием среди множества различных характеристических состояний (100,102,104,106,108,110) нагрузки, причем устройство содержит:
исполнительное устройство (14), имеющее подвижный вал (18), выполненный с возможностью резонансного перемещения (38) в ответ на сигнал (25) возбуждения и для соединения с рабочим элементом (20), при этом исполнительное устройство (14) дополнительно выполнено с возможностью работы в соответствии с нелинейной амплитудно-частотной характеристикой (58) зависимости амплитуды перемещения от частоты;
датчик (28) тока для отслеживания тока возбуждения; и
контроллер (24), соединенный с исполнительным устройством (14) через датчик (28) тока, при этом контроллер (24) (i) выполнен с возможностью обнаружения по меньшей мере одного из множества различных характеристических состояний (100,102,104,106,108,110) нагрузки в ответ на изменение отслеживаемого тока (29) возбуждения и (ii) с возможностью активной подачи сигнала (25) возбуждения на исполнительное устройство (14), выбранного из по меньшей мере двух различных сигналов возбуждения в зависимости от обнаруженного характеристического состояния нагрузки из множества различных характеристических состояний (100,102,104,106,108,110) нагрузки для осуществления самонастраивающегося амплитудного регулирования резонансного перемещения (38) подвижного вала среди множества различных характеристических состояний нагрузки, включающих в себя одну или более дополнительных нагрузок в виде силы, пружины, массы и демпфирования до заданного состояния нагрузки резонансной пружинно-массовой системы исполнительного устройства (14), соединенного с рабочим элементом (20);
при этом в ответ на обнаружение характеристического состояния нагрузки, соответствующего состоянию (100) вне полости рта, контроллер (24) выполнен с возможностью активной подачи первого сигнала (66) возбуждения на исполнительное устройство (14) на собственной частоте и при относительно низкой проводной мощности, а в ответ на обнаружение характеристического состояния нагрузки, соответствующего другому из множества характеристических состояний (102, 104, 106, 108, 110) нагрузки, контроллер (24) выполнен с возможностью активной подачи второго сигнала (70) возбуждения на исполнительное устройство (14) на рабочей частоте и при относительно высокой приводной мощности.
2. Устройство (10) по п. 1, в котором резонансное перемещение (38) содержит по меньшей мере одно из поворотного резонансного перемещения и поступательного резонансного перемещения.
3. Устройство (10) по п. 2, в котором поворотное резонансное перемещение (38) включает в себя (i) первую поворотную угловую амплитуду в диапазоне 4 градусов или менее и (ii) вторую поворотную угловую амплитуду в диапазоне 8-12 градусов.
4. Устройство (10) по п. 1, в котором каждый сигнал (25) возбуждения содержит прямоугольный сигнал (66,70), имеющий частоту и коэффициент заполнения.
5. Устройство (10) по п. 4, в котором контроллер (24) (i) активно подает первый сигнал (66) возбуждения на исполнительное устройство (14) в ответ на обнаружение характеристического состояния нагрузки, соответствующего состоянию (100) вне полости рта, (ii) активно подает второй сигнал (70) возбуждения на исполнительное устройство (14) в ответ на обнаружение характеристического состояния нагрузки, соответствующего одному или более из (ii)(a) состояния (102) начального контакта с полостью рта, (ii)(b) состояния (104) перемещения в полости рта, при котором амплитуда резонансного перемещения подвижного вала автономно увеличивается до амплитуды при полной мощности на рабочей частоте (72) второго сигнала (70) возбуждения посредством использования нелинейных амплитудно-частотных характеристик исполнительного устройства (14), (ii)(c) демпфированного состояния (106) в полости рта и (ii)(d) состояния (108) после выведения из полости рта, и (iii) активно подает первый сигнал (66) возбуждения на исполнительное устройство (14) в ответ на повторное обнаружение характеристического состояния нагрузки, соответствующего состоянию (110) вне полости рта.
6. Устройство (10) по п. 5, в котором частота первого сигнала (66) возбуждения включает в себя собственную частоту, а частота второго сигнала (70) возбуждения включает в себя рабочую частоту, при этом собственная частота отличается от рабочей частоты.
7. Устройство (10) по п. 1, в котором индивидуальное устройств (10) ухода содержит электрическую зубную щетку, при этом рабочий элемент (20) содержит чистящую головку с щетинками (22).
8. Способ самонастраивающегося амплитудного регулирования среди множества различных характеристических состояний (100,102,104,106,108,110) нагрузки индивидуального устройства (10) ухода, причем способ содержит этапы, на которых:
обеспечивают исполнительное устройство (14), имеющее подвижный вал (18), выполненный с возможностью резонансного перемещения (38) в ответ на сигнал (25) возбуждения и для соединения с рабочим элементом (20), и выполненное с возможностью работы в соответствии с нелинейной амплитудно-частотной характеристикой (58) зависимости амплитуды перемещения от частоты, при этом резонансное перемещение (38) содержит по меньшей мере одно из поворотного резонансного перемещения и поступательного резонансного перемещения;
отслеживают, посредством датчика (28) тока, ток возбуждения сигнала (25) возбуждения, подаваемого на исполнительное устройство (14);
обнаруживают, посредством контроллера (24), соединенного с исполнительным устройством (14) и датчиком (28) тока, по меньшей мере одно из множества различных характеристических состояний (100,102,104,106,108,110) нагрузки в ответ на изменение отслеживаемого тока (29) возбуждения; и
активно подают на исполнительное устройство (14) посредством контроллера (24) управляющий сигнал (25), выбранный из по меньшей мере двух различных управляющих сигналов в зависимости от обнаруженного характеристического состояния нагрузки из множества различных характеристических состояний (100,102,104,106,108,110) нагрузки для осуществления самонастраивающегося амплитудного регулирования резонансного перемещения подвижного вала (38) среди множества различных характеристических состояний нагрузки, которые включают в себя одну или более дополнительных нагрузок в виде силы, пружины, массы и демпфирования до заданного состояния нагрузки резонансной пружинно-массовой системы исполнительного устройства (14), соединенного с рабочим элементом (20);
при этом в ответ на обнаружение характеристического состояния нагрузки, соответствующего состоянию (100) вне полости рта, контроллер (24) активно подает первый сигнал (66) возбуждения на исполнительное устройство (14) на собственной частоте и при относительно низкой проводной мощности, а в ответ на обнаружение характеристического состояния нагрузки, соответствующего другому из множества характеристических состояний (102, 104, 106, 108, 110) нагрузки, контроллер (24) активно подает второй сигнал (70) возбуждения на исполнительное устройство (14) на рабочей частоте и при относительно высокой приводной мощности.
9. Способ по п. 8, в котором поворотное резонансное перемещение (38) включает в себя (i) первую поворотную угловую амплитуду в диапазоне 4 градуса или менее и (ii) вторую поворотную угловую амплитуду в диапазоне 8-12 градусов.
10. Способ по п. 8, в котором этап активной подачи включает в себя этапы, на которых (i) активно подают первый сигнал (66) возбуждения на исполнительное устройство (14) в ответ на обнаружение состояния инерционной массы, соответствующего состоянию вне полости рта (100), (ii) активно подают второй сигнал (70) возбуждения на исполнительное устройство (14) в ответ на обнаружение характеристического состояния нагрузки, соответствующего одному или более из (ii)(a) состояния начального контакта с полостью рта (102), (ii)(b) состояния перемещения в полости рта (104), в котором амплитуда резонансного перемещения подвижного вала автономно увеличивается до амплитуды при полной мощности на рабочей частоте (72) второго сигнала (70) возбуждения посредством использования нелинейных амплитудно-частотных характеристик исполнительного устройства (14), (ii)(c) демпфированного состояния в полости рта (106) и (ii)(d) состояния (108) после выведения из полости рта, и (iii) активно подают первый сигнал (66) возбуждения на исполнительное устройство (14) в ответ на повторное обнаружение характеристического состояния нагрузки, соответствующего состоянию (110) вне полости рта.
11. Способ по п. 10, в котором первый сигнал (66) возбуждения включает в себя прямоугольный сигнал, имеющий собственную частоту и первый коэффициента заполнения, а второй сигнал (70) возбуждения включает в себя прямоугольный сигнал, имеющий рабочую частоту и второй коэффициент заполнения, при этом указанная собственная частота отличается от рабочей частоты, а второй коэффициент заполнения больше первого коэффициента заполнения.
12. Способ по п. 11, в котором собственная частота содержит частоту исполнительного устройства (14) в точке, в которой имеет место наивысшая чувствительность к току на амплитудно-частотной характеристике (58) исполнительного устройства (14).
13. Способ по п. 11, в котором рабочая частота содержит частоту в диапазоне 200-300 Гц, подходящую для получения требуемого очищающего эффекта и эффективности посредством рабочего элемента (20).
14. Способ по п. 11, в котором первый коэффициент заполнения находится в диапазоне от 10:90 до 30:70, что соответствует диапазону 10-30 процентов во включенном состоянии и диапазону 90-70 процентов в выключенном состоянии соответственно для каждого из участка положительной полярности и участка отрицательной полярности первого сигнала (66) возбуждения, а второй коэффициент заполнения находится в диапазоне от 90:10 до 70:30, что соответствует диапазону 90-70 процентов во включенном состоянии и диапазону 10-30 процентов в выключенном состоянии соответственно для каждого из участка положительной полярности и участка отрицательной полярности второго сигнала (70) возбуждения.
| US 2011005015 A1, 13.01.2011 | |||
| US 2007050982 A1, 08.03.2007 | |||
| US 5955799 A, 21.09.1999 | |||
| US 2013025078 A1, 31.01.2013. |

