Изобретение относится к машиностроению, а именно к механическим передачам с зубчатым зацеплением, и может быть использовано в любых механизмах, где требуется преобразование вращательного движения входного звена в угловое перемещение выходного звена с увеличением крутящего момента.
Из уровня техники известны конструкции планетарных редукторов на основе цилиндрических передач типа «ЗК», обладающие общими важными конструктивными особенностями, а именно соосностью входного и выходного валов, многопоточностью передачи момента, а также широким диапазоном передаточных чисел [1].
Общим недостатком известных планетарных редукторов является относительная неплавность работы передач (динамичность, виброактивность, шум), связанная с ударным входом зубьев в зацепление и (или) малым коэффициентом перекрытия в каждом из зацеплений сателлитов с центральными колесами. Неплавность работы во многом преодолевается в редукторах червячного типа.
Наиболее близким техническим решением к заявленному редуктору и выбранному в качестве прототипа признан планетарный червячно-спироидный редуктор (RU 96113170A, МПК F16H 1/16, опубл. 02.07.1996), состоящий из входной ступени, представляющей собой неортогональную червячную передачу, и выходной ступени, представляющей собой неортогональную двухвенцовую спироидную передачу, причем червяк-сателлит спироидной передачи одновременно зацепляется с неподвижным и подвижным спироидными колесами, а ее подвижное колесо жестко соединено с выходным валом редуктора [2].
В данной конструкции выходной ступени относительное расположение спироидного червяка-сателлита и подвижного спироидного колеса является основным, а расположение этого же спироидного червяка-сателлита при зацеплении с неподвижным спироидным колесом - вспомогательным, характеризующимся большей скоростью скольжения звеньев, чем в случае основного относительного расположения червяка и колеса. Указанный редуктор имеет при этомсоосные входной и выходной валы и относительно малые массу и габаритные размеры.
Недостатками этого решения являются: низкий КПД редуктора (как результат применения вспомогательного относительного расположения спироидного колеса и червяка в одном из зацеплений двухвенцовой передачи), невозможность оптимизации в отдельности каждого из двух одновременных зацеплений червяка-сателлита с неподвижным и подвижным колесами, а также наличие большого числа ограничений при выборе параметров передачи. Это, например, ограничения при подборе разницы чисел зубьев спироидных колес, а также необходимость выбирать одни и те же (обычно неоптимальные для каждого из двух одновременных зацеплений) осевой модуль, диаметр, число заходов и углы профиля червяка-сателлита. Кроме того, наличие у спироидного червяка-сателлита двух зон зацепления неблагоприятно сказывается на его тепловой нагруженности. Все это в совокупности ограничивает нагрузочную способность редуктора, которая определяется нагрузочной способностью зацепления «червяк-сателлит - неподвижное колесо», находящегося во вспомогательном относительном расположении звеньев и имеющего меньшую нагрузочную способность, чем зацепление «червяк-сателлит подвижное колесо», находящееся в основном относительном расположении, примерно на 25%. Кроме того, подвижное колесо редуктора-прототипа всегда имеет большее число зубьев, чем неподвижное, что однозначно определяет соотношение направлений вращения червяка-сателлита и подвижного колеса.
Задачей заявляемого изобретения является создание конструкции редуктора, позволяющей устранить вышеуказанные недостатки принятого за прототип устройства за счет изменения выходной ступени.
Технический результат предлагаемого изобретения при сохранении преимуществ прототипа заключается в повышении коэффициента полезного действия редуктора как результат реализации двух основных относительных расположений спироидных червяков и колес и, следовательно, уменьшения сил, действующих на выходной вал редуктора. Дополнительным техническим результатом изобретения является повышенная нагрузочная способность редуктора.
Указанная задача решена тем, что планетарный червячно-спироидный редуктор содержит соосные входной и выходной валы, состоит из входной ступени, представляющей собой неортогональнуючервячную передачу, и выходной ступени, представляющей собой неортогональную спироидную передачу с первым червяком-сателлитом, неподвижным и подвижным спироидными колесами, причем последнее жестко соединено с выходным валом редуктора. Отличает редуктор от известных то, что введен второй червяк-сателлит, соосный первому червяку-сателлиту, жестко соединенный с ним и расположенный относительно него по другую сторону от межосевой линии редуктора, причем неподвижное колесо находится в зацеплении со вторым червяком-сателлитом.
Редуктор может быть выполнен в трех вариантах.
Вариант 1. Диаметры, модули, числа заходов и углы профиля витков первого и второго червяков-сателлитов одинаковы, диаметры подвижного и неподвижного спироидных колес выходной ступени одинаковы, а числа зубьев упомянутых колес различны.
Вариант 2. Диаметры, модули, числа заходов и углы профиля витков первого и второго червяков-сателлитов различны, диаметры подвижного и неподвижного спироидных колес выходной ступени одинаковы, а числа зубьев упомянутых колес различны.
Вариант 3. Диаметры, модули, числа заходов и углы профиля витков первого и второго червяков-сателлитов различны, диаметры подвижного и неподвижного спироидных колес выходной ступени и числа зубьев упомянутых колес различны.
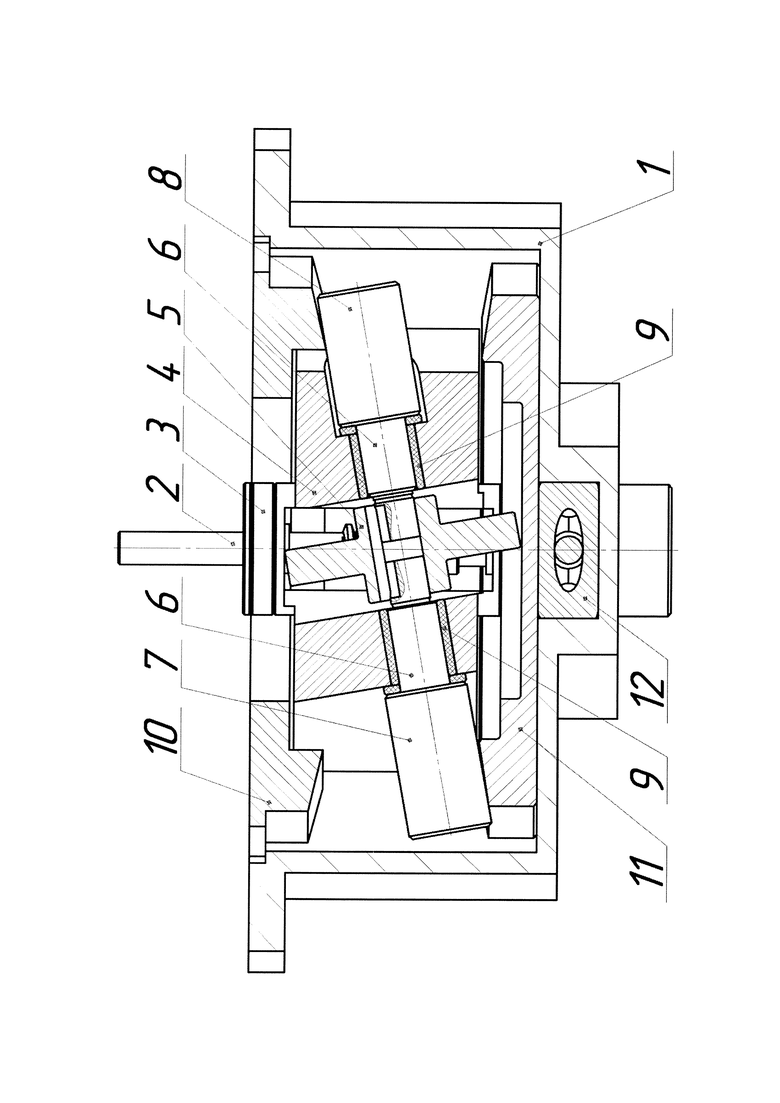
Изобретение поясняется чертежом, где на фигуре схематически показана конструкция редуктора в разрезе.
Планетарный червячно-спироидный редуктор устроен следующим образом.
Он состоит из корпуса 1, в котором располагаются все остальные конструктивные элементы. Входной червячный вал 2 первой ступени, установленный в подшипниках 3, закрепленных в подвижном водиле 4, зацепляется с червячным колесом 5, составляя неортогональную червячную передачу. Червячное колесо 5 входной ступени жестко связано с валом 6 и двумя спироидными червяками-сателлитами 7 и 8, которые образуют ведущее звено выходной ступени. Выходное звено первой ступени (червячное колесо 5) выполнено с возможностью совершения планетарного движения вместе с ведущим звеном выходной ступени (червяки-сателлиты 7 и 8) и водилом 4. Выходной вал 6 первой ступени установлен в подшипниках 9, в свою очередь расположенных в водиле 4. Спироидный червяк-сателлит 8 зацепляетсяс неподвижным спироидным колесом 10, которое жестко соединено с корпусом 1. Спироидный червяк-сателлит 7 зацепляется с подвижным спироидным колесом 11, которое установлено через подшипники 12 в корпусе 1.
Червяки-сателлиты выходной неортогональной спироидной ступени могут отличаться друг от друга по геометрическим параметрам или совпадать. В случае одинаковых червяков-сателлитов обеспечивается унификация конструктивных элементов и повышается технологичность конструкции. С другой стороны, применение червяков-сателлитов с различными геометрическими параметрами позволяет оптимизировать конструктивные параметры передач. Передаточные числа в зацеплениях соответствующих червяков-сателлитов и колес должны отличаться, следовательно, неподвижное и подвижное спироидные колеса могут иметь различные числа зубьев, причем их разница может быть любой, в том числе минимальной. В зависимости от разницы в передаточных числах в передачах с подвижным и неподвижным колесами, подвижное колесо может вращаться по часовой стрелке или против нее при одном и том же направлении вращения входного вала. Например, при вращении входного вала по часовой стрелке и правых червяках, при равных червяках-сателлитах 7, 8 и числе зубьев неподвижного спироидного колеса 10 большем, чем число зубьев подвижного спироидного колеса 11 вращение выходного вала происходит против часовой стрелки (если смотреть сверху на входной червячный вал 2) и наоборот.
Диаметры спироидных колес 10 и 11 могут быть выполнены одинаковыми с целью унификации и повышения технологичности конструкции или различными для оптимизации спироидных передач.
В отличие от прототипа, в котором наличие основного и вспомогательного относительных расположений червяка и колес предполагает выбор межосевого угла в ограниченных пределах - в соответствии с условием коллинеарности вектора относительной скорости и касательных к линиям витков одного и того же червяка в зацеплениях с неподвижным и подвижным колесами, в предлагаемой конструкции межосевой угол передачи выходной ступени может быть выбран практически любым, что позволяет варьировать передаточным числом ступени и подбирать оптимальные сочетания геометрических параметров.
Передаточное число предлагаемого планетарного червячно-спироидного редуктора находится по формуле:

где z1 - число заходов входного червяка 2 первой ступени, z2 - число зубьев червячного колеса 5 первой ступени, z3 - число заходов спироидного червяка-сателлита 7, z3' - число заходов спироидного червяка-сателлита 8, z4 - число зубьев неподвижного спироидного колеса 10, z5 - число зубьев подвижного колеса 11.
Направления витков червяков 2, 7, 8 для предлагаемой конструкции редуктора, изображенного на фигуре, должны быть выбраны одноименными, что способствует более высокому КПД.
В предлагаемой конструкции КПД редуктора при параметрах передач z1=1, z2=70, z3=1, z3'=1, z4=40, z5=46 и передаточном числе 21459 более чем в два раза превышает КПД прототипа при тех же самых параметрах передачи.
Знаменатель в формуле передаточного числа может быть отрицательным или положительным, т.е. вращение выходного звена подвижного спироидного колеса 11 возможно по часовой стрелке и против нее при одном и том же вращении входного звена.
Общее передаточное число планетарного червячно-спироидного редуктора может составлять от нескольких сотен до нескольких сотен тысяч и более.
Планетарный червячно-спироидный редуктор работает следующим образом.
На червячный вал 2 подается вращение от приводного устройства (например, электродвигателя). Входной червячный вал 2 в свою очередь вращает червячное колесо 5, преобразуя вращающий момент входного вала 2 в момент на валу 6 в соответствие с передаточным числом червячной ступени. Каждый из двух спироидных червяков-сателлитов 7 и 8 образует неортогональную спироидную передачу со спироидными колесами 11 и 12, соответственно. Спироидный червяк 8, зацепляющийся с неподвижным спироидным колесом 10, отталкиваясь от него, приводит во вращение водило, совершая тем самым планетарное движение вокруг общей оси водила и колес 10 и 11. Червяк-сателлит 7, жестко связанный с червяком-сателлитом 8, передает вращающий момент на подвижное спироидное колесо 11 и выходной вал.
Таким образом, заявленный двухступенчатый планетарный червячно-спироидный редуктор имеет больший коэффициент полезного действия по сравнению с прототипом, большую нагрузочную способность, обладает возможностью подбора оптимального сочетания геометрических параметров передач, а также в предлагаемой конструкции обеспечивается возможность управления соотношением направлений вращений входного и выходного валов редуктора.
В заключение следует отметить, что в предлагаемой конструкции двухвенцовая неортогональная спироидная передача фактически заменяется на две одновенцовые неортогональные спироидные передачи. И подвижное, и неподвижное спироидные колеса в зацеплении с соответствующими червяками-сателлитами таким образом оказываются в основном относительном расположении, что приводит к повышению коэффициента полезного действия и нагрузочной способности редуктора.
Дополнительно появляется возможность подбирать оптимальные параметры зацепления, например, модули и передаточные числа, так как, в отличие от прототипа, спироидные передачи не должны быть одинаковыми по модулям, диаметрам и углам профиля червяков и диаметрам колес. Оптимизация каждого из зацеплений червяков-сателлитов с соответствующими подвижным и неподвижным колесами, в частности, независимый друг от друга выбор сочетаний чисел зубьев колес, осевых модулей, диаметров, чисел заходов и углов профиля двух червяков-сателлитов, обеспечивает повышение нагрузочной способности спироидной ступени и всего редуктора.
В зависимости от выбираемой разницы чисел зубьев подвижного и неподвижного колеса (число зубьев подвижного колеса больше или меньше числа зубьев неподвижного), подвижное колесо может вращаться по часовой стрелке или против нее при одном и том же направлении вращения входного вала. Следовательно, в предлагаемой конструкции появляется дополнительная возможность управления сочетанием направлений вращений червяков-сателлитов и подвижного колеса (и, следовательно, входного и выходного валов редуктора) подбором чисел зубьев подвижного и неподвижного колес.
Список использованных источников:
1. Планетарные передачи. Справочник. Под ред. докторов техн. наук В.Н. Кудрявцева и Ю.Н. Кирдяшева. Л«, «Машиностроение» (Ленингр. отд-ние), 1977. 536 с. ил.
2. RU 96113170A Российская Федерация, МПК F16H 1/16. Планетарный червячно-спироидный редуктор / Трубачев Е.С. (RU); заявитель Институт механики ИжГТУ (RU); заявл. 02.07.1996; опубл. 27.10.1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухступенчатый зубчатый редуктор | 1981 |
|
SU973973A1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР С ДВУМЯ СООСНЫМИ ВЫХОДНЫМИ ВАЛАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ | 2016 |
|
RU2729324C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР | 1999 |
|
RU2153613C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| Планетарная передача с предварительной ступенью | 2022 |
|
RU2782006C1 |
| ЗУБЧАТАЯ ПЕРЕДАЧА С ПЕРЕМЕННОЙ СКОРОСТЬЮ | 2003 |
|
RU2247271C2 |
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР | 2018 |
|
RU2693752C1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР | 2018 |
|
RU2694003C1 |
Изобретение относится к машиностроению. Планетарный червячно-спироидный редуктор содержит соосные входной и выходной валы, состоит из входной ступени, представляющей собой неортогональную червячную передачу, и выходной ступени, представляющей собой неортогональную спироидную передачу с первым червяком-сателлитом, неподвижным и подвижным спироидными колесами, причем последнее жестко соединено с выходным валом редуктора. В редуктор введен второй червяк-сателлит, соосный первому червяку-сателлиту, жестко соединенный с ним и расположенный относительно него по другую сторону от межосевой линии редуктора, причем неподвижное колесо находится в зацеплении со вторым червяком-сателлитом. Обеспечивается повышение коэффициента полезного действия редуктора. 3 з.п. ф-лы, 1 ил.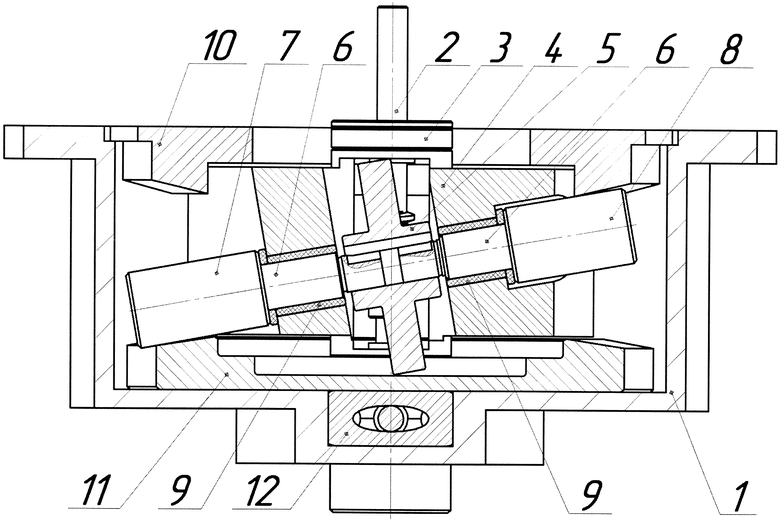
1. Планетарный червячно-спироидный редуктор, содержащий соосные входной и выходной валы, состоящий из входной ступени, представляющей собой неортогональную червячную передачу, и выходной ступени, представляющей собой неортогональную спироидную передачу с первым червяком-сателлитом, неподвижным и подвижным спироидными колесами, причем последнее жестко соединено с выходным валом редуктора, отличающийся тем, что введен второй червяк-сателлит, соосный первому червяку-сателлиту, жестко соединенный с ним и расположенный относительно него по другую сторону от межосевой линии редуктора, причем неподвижное колесо находится в зацеплении со вторым червяком-сателлитом.
2. Планетарный червячно-спироидный редуктор по п. 1, отличающийся тем, что диаметры, модули, числа заходов и углы профиля витков первого и второго червяков-сателлитов одинаковы, диаметры подвижного и неподвижного спироидных колес выходной ступени одинаковы, а числа зубьев упомянутых колес различны.
3. Планетарный червячно-спироидный редуктор по п. 1, отличающийся тем, что диаметры, модули, числа заходов и углы профиля витков первого и второго червяков-сателлитов различны, диаметры подвижного и неподвижного спироидных колес выходной ступени одинаковы, а числа зубьев упомянутых колес различны.
4. Планетарный червячно-спироидный редуктор по п. 1, отличающийся тем, что диаметры, модули, числа заходов и углы профиля витков первого и второго червяков-сателлитов различны, диаметры подвижного и неподвижного спироидных колес выходной ступени и числа зубьев упомянутых колес различны.
| RU 96113170 A, 27.10.1998 | |||
| Двухступенчатый зубчатый редуктор | 1981 |
|
SU973973A1 |
| Редуктор | 1981 |
|
SU954670A1 |
| WO 2001029449 A1, 26.04.2001. | |||

