Изобретение относится к механическим средствам управления зубчатыми передачами и может применяться в области химического и нефтегазового машиностроения при изготовлении приводов трубопроводной запорной арматуры.
Из уровня техники известен двухскоростной ручной привод запорной трубопроводной арматуры, содержащий корпус, крышку, жестко связанную с маховиком, планетарный механизм и переключатель скорости, выполненный в виде поворотного рычага, взаимодействующего с пазами на водиле и фланце солнечной шестерни планетарного механизма (RU 2343329C2, МПК F16K 31/53, опубл. 10.01.2009).
Недостатками привода являются его сложность, обусловленная наличием большого числа зубчатых колес и сложного в изготовлении переключателя скорости, а также невозможность автоматического переключения скорости планетарного механизма с жесткими элементами, что требует выполнения специальной операции переключения.
Известен привод двухскоростной ручной для запорно- регулирующей арматуры, содержащий корпус, крышку, маховик, планетарный механизм, состоящий из ведущей вал-шестерни, сателлитов с внешними зубьями, неподвижного центрального колеса с внутренними зубьями и ведомого вала -водила, переключатель скорости, выполненный в виде ведущей вал-шестерни с шестигранником на торце и соответствующим ему шестигранным переходником, жестко соединенным с ведомым валом -водилом планетарного механизма, а также фиксаторы положения переключателя скорости, выполненные в виде подпружиненных шариков (RU 2413114 С2, МПК F16K 31/53, опубл. 27.02.2011).
Недостатками конструкции также являются ее сложность, связанная с наличием большого числа зубчатых колес, фиксаторов положения переключателя скорости и невозможность автоматического переключения скорости планетарного механизма.
Наиболее близким к заявленному изобретению техническим решением, выбранным в качестве прототипа, признан двухскоростной ручной привод запорной арматуры с автоматическим переключением скоростей (RU 2659681C2, МПК F16K 31/53, опубл. 03.07.2018), содержащий корпус; шкив, жестко связанный с ведущим валом-водилом, содержащим паз; установленный в пазу ведущего вала-водила нажимной элемент в виде ролика; неподвижное колесо с внешними зубьями; подвижное колесо с внутренними зубьями, посаженное на нажимной элемент и соединенное с ведомым звеном посредством узла упругой связи, выполненного в виде нескольких гибких стержней, установленных в отверстиях подвижного колеса и ведомого звена.
Недостатками прототипа являются большой осевой размер, вызванный наличием длинных гибких стержней, и низкий уровень технологичности из-за необходимости высокоточного изготовления гибких стержней и отверстий под них, что требуется для обеспечения равномерного распределения нагрузки между гибкими стержнями.
Технической задачей, на решение которой направлено заявленное изобретение, является снижение осевого размера механизма и повышение уровня его технологичности.
Для решения поставленной задачи в двухскоростном ручном приводе запорной арматуры, содержащем корпус; шкив, жестко связанный с ведущим валом-водилом, имеющим один или несколько пазов; установленные в пазах ведущего вала-водила нажимные элементы; неподвижное колесо с внешними зубьями; подвижное колесо с внутренними зубьями, посаженное на нажимные элементы и соединенное с ведомым звеном посредством узла упругой связи, узел упругой связи выполнен в виде гибкого обода подвижного колеса, составляющего одно целое с ведомым звеном и содержащего конические пазы под нажимные элементы сферической формы, а ведущий вал-водило - в виде стакана с пазами-гнездами под нажимные элементы.
Снижение осевого размера привода и повышение уровня его технологичности достигается выполнением узла упругой связи подвижного колеса с ведомым звеном в виде сравнительно узкого и простого в изготовлении гибкого обода подвижного колеса, выполненного за одно целое с ведомым звеном.
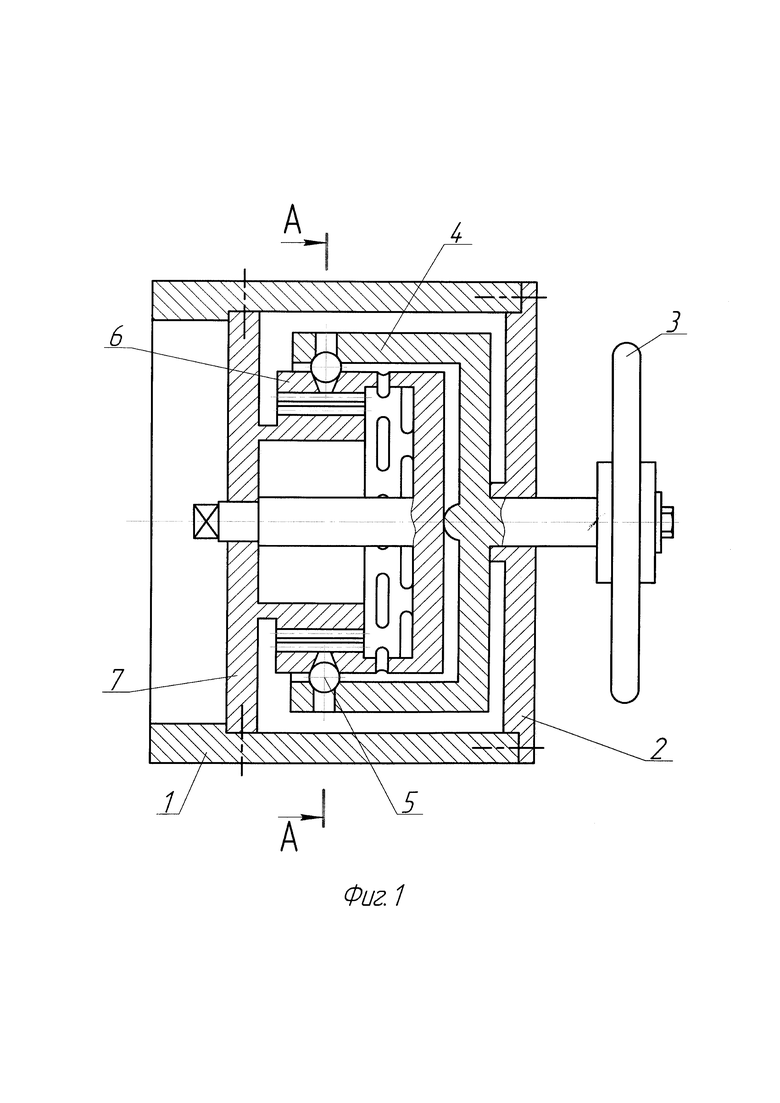
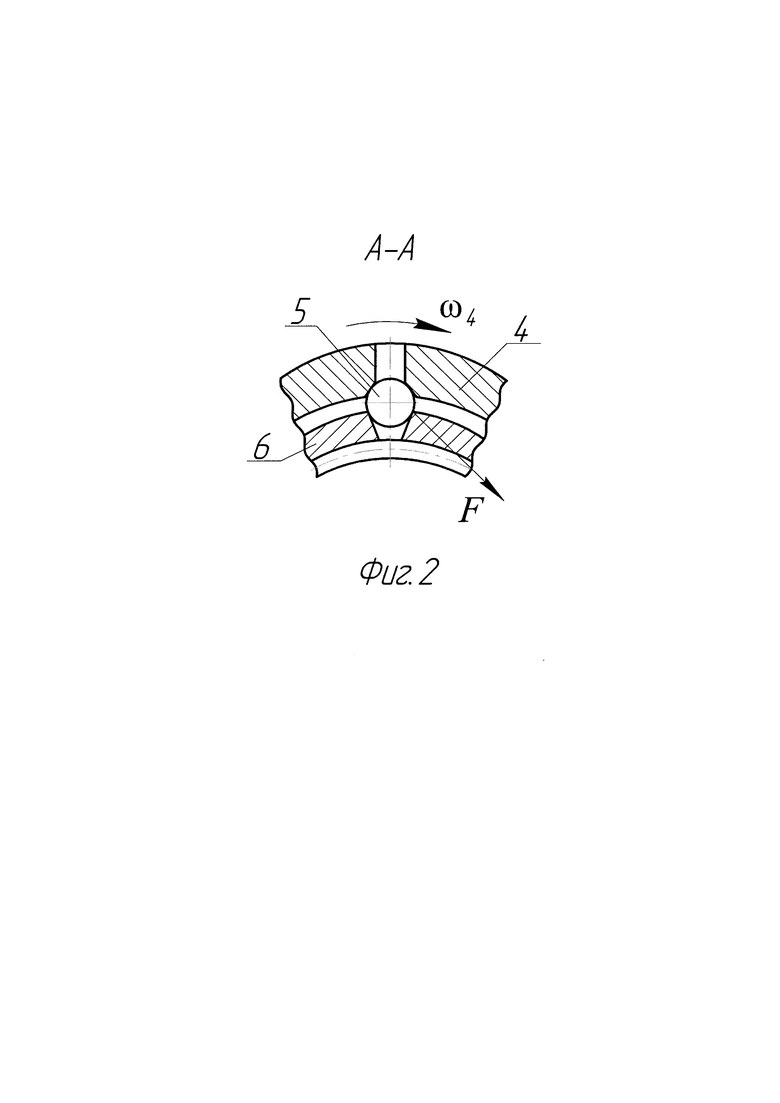
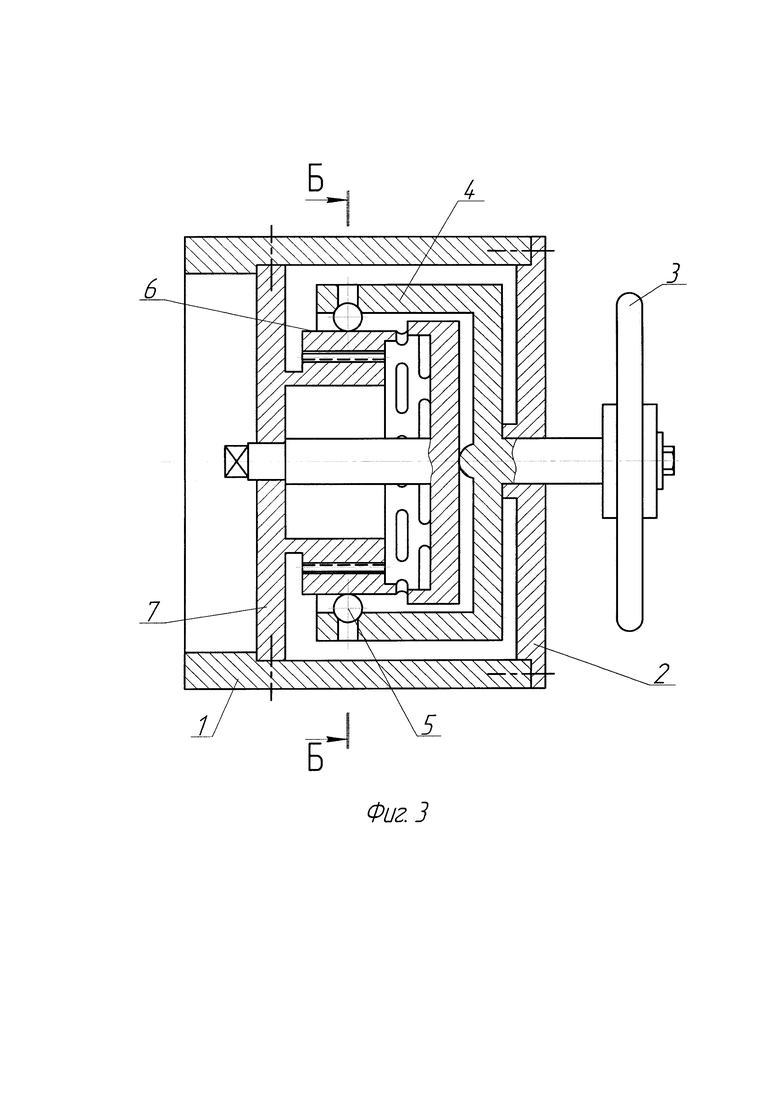
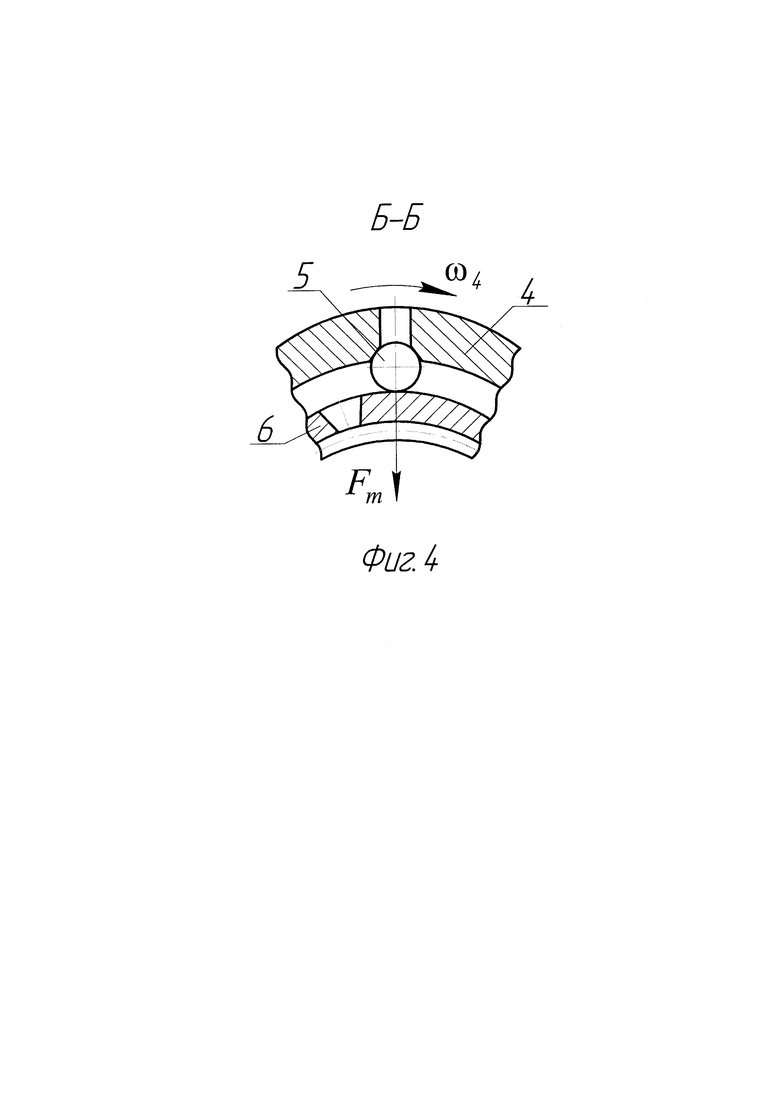
Сущность изобретения поясняется чертежами, где на фиг. 1 показан общий вид двухскоростного ручного привода запорной арматуры в разрезе при работе в режиме передачи движения от маховика к ведомому звену непосредственно через узел упругой связи; на фиг. 2 - вид по А-А на фиг. 1 ведущего вала-водила, сферического нажимного элемента и подвижного колеса; на фиг. 3 - вид двухскоростного ручного привода запорной арматуры в разрезе при передаче движения посредством зубчатого зацепления и работе механизма в режиме редуктора; на фиг. 4 - вид по Б-Б на фиг. 3.
Двухскоростной ручной привод запорной арматуры содержит корпус 1, крышку 2, шкив 3, ведущий вал-водило 4, сферические нажимные элементы 5, подвижное колесо 6, неподвижное колесо 7.
Неподвижное колесо 7 выполнено с внешними зубьями. Подвижное колесо 6 выполнено с тонким гибким ободом, внутренними зубьями, коническими пазами на ободе под сферические нажимные элементы 5 и за одно целое с ведомым звеном. Для снижения жесткости обода подвижного колеса 6 в месте его соединения со ступицей ведомого звена выполнены пазы, расположенные в шахматном порядке. Ведущий вал-водило 4 выполнен в виде стакана с пазами-гнездами под сферические нажимные элементы 5. Глубина конических пазов на ободе подвижного колеса 6 под сферические нажимные элементы 5 соответствует величине деформации обода подвижного колеса 6, необходимой для вхождения его в зацепление с неподвижным колесом 7. Разница чисел зубьев неподвижного колеса 7 (Z7) и подвижного колеса 6 (Z6) выбрана исходя из требуемого передаточного отношения привода i при работе его в режиме редуктора: i=Z6/(Z6-Z7).
Сферические нажимные элементы 5 установлены в пазах-гнездах ведущего вала-водила 4 и сопрягаются с ободом подвижного колеса 6. Неподвижное колесо 7 жестко соединено с корпусом 1. Шкив 3 закреплен на ведущем валу-водиле 4.
Сборка двухскоростного ручного привода запорной арматуры осуществляется в следующей последовательности.
В корпусе 1 устанавливается и закрепляется в нем неподвижное колесо 7. Соосно ему в корпусе 1 располагается подвижное колесо 6 так, что выполненное с ним за одно целое ведомое звено цилиндрической поверхностью садится на посадочную поверхность неподвижного колеса 7. Сферические нажимные элементы 5 сажаются в конические пазы подвижного колеса 6. Ведущий вал-водило 4 осевым перемещением сажается пазами-гнездами на сферические нажимные элементы 5, деформируя при этом гибкий обод подвижного колеса 6. На ведущий вал-водило 4 и одновременно в корпус 1 сажается крышка 2. Затем на ведущий вал-водило 4 сажается и закрепляется на нем шкив 3.
Двухскоростной ручной привод запорной арматуры работает следующим образом.
При большой нагрузке на рабочем органе запорной арматуры (на фигурах условно не показан) для его страгивания в момент открытия задвижки вращение от шкива 3 передается ведущему валу-водилу 4 и установленным в нем сферическим нажимным элементам 5, которые давят на кромку конического паза гибкого обода подвижного колеса 6, деформируя его в радиальном направлении до тех пор, пока сферические нажимные элементы 5 не выйдут из конических пазов гибкого обода подвижного колеса 6. При этом под действием радиальной силы Fm подвижное колесо 6 входит в зацепление с неподвижным колесом 7 (см. фиг. 4). При дальнейшем вращении шкива 3 и жестко связанного с ним ведущего вала-водила 4 с угловой скоростью ω4 движение передается посредством зацепления неподвижного колеса 7 и подвижного колеса 6 ведомому звену и связанному с ним исполнительному механизму запорного органа (не показан) с увеличением крутящего момента, но с уменьшением скорости. Привод в этом случае работает в режиме редуктора с передаточным отношением i.
После страгивания рабочего органа крутящий момент снижается, вращение шкива 3 и связанного с ним ведущего вала-водила 4 до положения, когда сферический нажимной элемент 5 встанет напротив конического паза на ободе подвижного колеса 6, приводит к тому, что гибкий обод подвижного колеса 6 выправляется и садится коническим пазом на сферический нажимной элемент 5, выводя подвижное колесо 6 из зацепления с неподвижным колесом 7. При дальнейшем вращении шкива 3 и ведущего вала-водила 4 движение передается силой F (см. фиг. 2) непосредственно через подвижное колесо 6 ведомому звену и исполнительному механизму с передаточным отношением i=1, что увеличивает скорость перемещения запорного органа. При этом радиальная деформация обода подвижного колеса 6 не превышает радиального зазора между вершинами его зубьев и зубьев неподвижного колеса 7 в ненагруженном состоянии механизма.
При закрытии задвижки вращательное движение от шкива 3 передается непосредственно через подвижное колесо 6 ведомому звену и исполнительному механизму с передаточным отношением, равным единице, до соприкосновения запорного органа с корпусными деталями арматуры (не показаны). При дальнейшем вращении шкива 3 момент на ведущем валу-водиле 4 возрастает до тех пор, пока сферический нажимной элемент 5 не выйдет из конического паза на ободе подвижного колеса 6, приводя к его деформации и вхождению подвижного колеса 6 в зацепление с неподвижным колесом 7. Передача вращательного движения после этого происходит с увеличением крутящего момента, обеспечивая полное закрытие запорного органа.
Таким образом, выполнение привода запорной арматуры с узлом упругой связи элементов механизма в виде гибкого обода подвижного колеса, составляющего одно целое с ведомым звеном и содержащего конические пазы под нажимные элементы сферической формы, позволяет снизить осевой размер привода и повысить уровень его технологичности при автоматическом переключении скоростей.
Источники информации
1. Пат. №2343329 РФ, МПК F16K 31/53. Двухскоростной ручной привод трубопроводной арматуры / Гольдфарб В.И., Громов Д.П., Трубачев Е.С. и др. Заяв. 06.07.2006. Опубл. 10.01.2009).
2. Пат. №2413114 РФ, МПК F16K 31/53. Привод двухскоростной ручной для запорно-регулирующей арматуры / Чернов А.В., Чернов П.А., Ротермель П.В. и др. Заяв. 14.08.2009. Опубл. 27.02.2011).
3. Пат. №2659681 РФ, МПК F16K 31/53. Двухскоростной ручной привод запорной арматуры / Плеханов Ф.И., Грахов В.П., Щенятский А.В. и др. Заяв. 24.04.2017. Опубл. 03.07.2018 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухскоростной ручной привод запорной арматуры | 2019 |
|
RU2725336C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2017 |
|
RU2659681C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2019 |
|
RU2694385C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2019 |
|
RU2716781C1 |
| ДВУХСКОРОСТНОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2010 |
|
RU2433326C1 |
| РУЧНОЙ ДВУХСКОРОСТНОЙ ПРИВОД ДЛЯ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2008 |
|
RU2378555C2 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2006 |
|
RU2343329C2 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2009 |
|
RU2454590C2 |
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| ПРИВОД ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2196928C1 |
Изобретение относится к механическим средствам управления зубчатыми передачами и может применяться в области химического и нефтегазового машиностроения при изготовлении приводов трубопроводной запорной арматуры. Двухскоростной ручной привод запорной арматуры содержит корпус, шкив, жестко связанный с ведущим валом-водилом, имеющим один или несколько пазов. В пазах ведущего вала-водила установлены нажимные элементы, неподвижное колесо с внешними зубьями; подвижное колесо с внутренними зубьями, посаженное на нажимные элементы и соединенное с ведомым звеном посредством узла упругой связи. Узел упругой связи выполнен в виде гибкого обода подвижного колеса, составляющего одно целое с ведомым звеном и содержащего конические пазы под нажимные элементы сферической формы, а ведущий вал-водило - в виде стакана с пазами-гнездами под нажимные элементы. Техническим результатом изобретения, является снижение осевого размера привода с одновременным повышением уровня его технологичности при автоматическом переключении скоростей. 4 ил.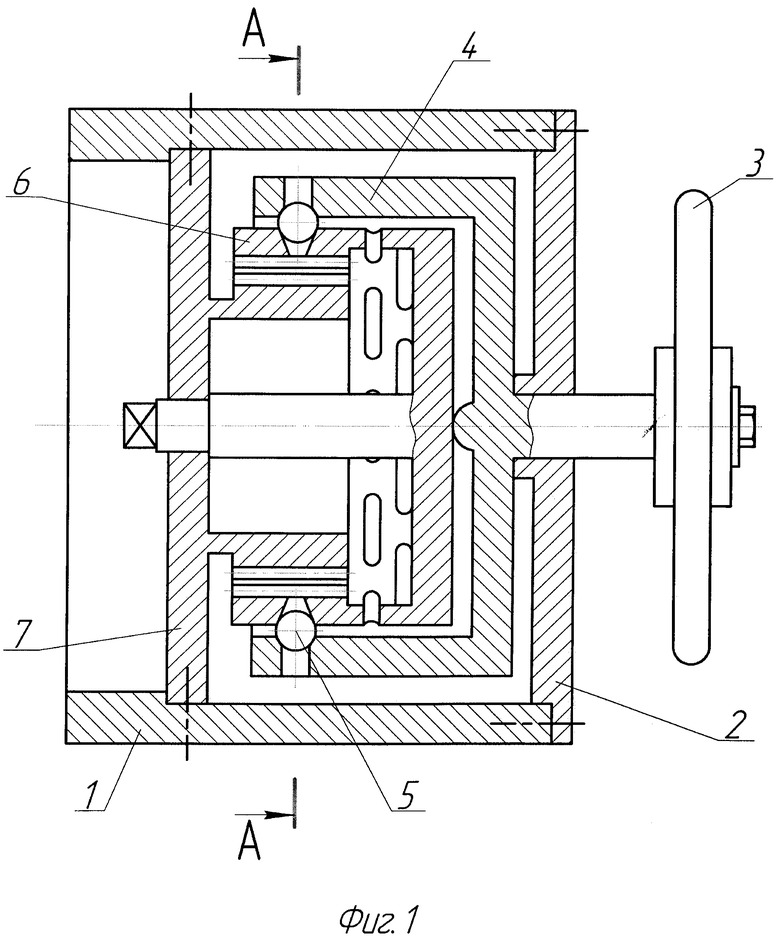
Двухскоростной ручной привод запорной арматуры, содержащий корпус, шкив, жестко связанный с ведущим валом-водилом, имеющим один или несколько пазов; установленные в пазах ведущего вала-водила нажимные элементы; неподвижное колесо с внешними зубьями; подвижное колесо с внутренними зубьями, посаженное на нажимные элементы и соединенное с ведомым звеном посредством узла упругой связи, отличающийся тем, что узел упругой связи выполнен в виде гибкого обода подвижного колеса, составляющего одно целое с ведомым звеном и содержащего конические пазы под нажимные элементы сферической формы, а ведущий вал-водило - в виде стакана с пазами-гнездами под нажимные элементы.
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2017 |
|
RU2659681C1 |
| ПРИВОД ДВУХСКОРОСТНОЙ РУЧНОЙ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ | 2009 |
|
RU2413114C1 |
| US 2005012064 A1, 20.01.2005 | |||
| US 4429591 А, 07.02.1984 | |||
| Пробоотборник | 1948 |
|
SU74994A1 |

