Изобретение относится к области машиностроения, в частности к приводам трубопроводной запорной арматуры.
Известен двухскоростной ручной привод запорной трубопроводной арматуры (RU 2343329 C2, МПК F16K 31/53, опубл. 10.01.2009), содержащий корпус, крышку, жестко связанную с маховиком, планетарный механизм и переключатель скорости, выполненный в виде поворотного рычага, взаимодействующего с пазами на водиле и фланце солнечной шестерни планетарного механизма [1].
Недостатками привода являются его сложность, обусловленная наличием большого числа зубчатых колес и сложного в изготовлении переключателя скорости, а также невозможность автоматического переключения скорости планетарного механизма с жесткими элементами, что требует выполнения специальной операции переключения.
Известен привод двухскоростной ручной для запорно-регулирующей арматуры (RU2413114 С1, МПК F16K 31/53, опубл. 27.02.2011), содержащий корпус, крышку, маховик, планетарный механизм, состоящий из ведущей вал-шестерни, сателлитов с внешними зубьями, неподвижного центрального колеса с внутренними зубьями и ведомого вала-водила, переключатель скорости, выполненный в виде ведущей вал-шестерни с шестигранником на торце и соответствующим ему шестигранным переходником, жестко соединенным с ведомым валом-водилом планетарного механизма, а также фиксаторы положения переключателя скорости, выполненные в виде подпружиненных шариков (прототип) [2].
Недостатками этой конструкции являются ее низкая технологичность, связанная со сложностью конструкции привода, обусловленной наличием большого числа зубчатых колес, фиксаторов положения переключателя скорости. Также известная конструкция привода не обеспечивает возможность автоматического переключения скорости планетарного механизма.
Задачей данного изобретения является упрощение конструкции привода, обеспечение автоматического переключения скорости планетарного механизма.
Для решения поставленной задачи в двухскоростном ручном приводе запорной арматуры, содержащем корпус, крышку, маховик и планетарный механизм, планетарный механизм выполнен из установленного неподвижно в его корпусе центрального колеса с внешними зубьями и сателлита с внутренними зубьями и продольным пазом на внутренней поверхности ступицы, связанного посредством гибких стержней с ведомым валом-водилом и посаженного на ролик, расположенный в продольном пазу ведущего вала.
Положительным техническим результатом, обеспечиваемым указанной совокупностью конструктивных признаков устройства, является упрощение конструкции привода, что достигается выполнением планетарной передачи, содержащей два зубчатых колеса, ведущий и ведомый валы и соединительные элементы. Дополнительным техническим результатом является возможность автоматического переключения скорости, что обеспечивается выполнением ведущего вала и ступицы сателлита с продольными пазами, размеры которых соответствуют размерам расположенного в пазу ведущего вала ролика, и наличием гибких соединительных стержней.
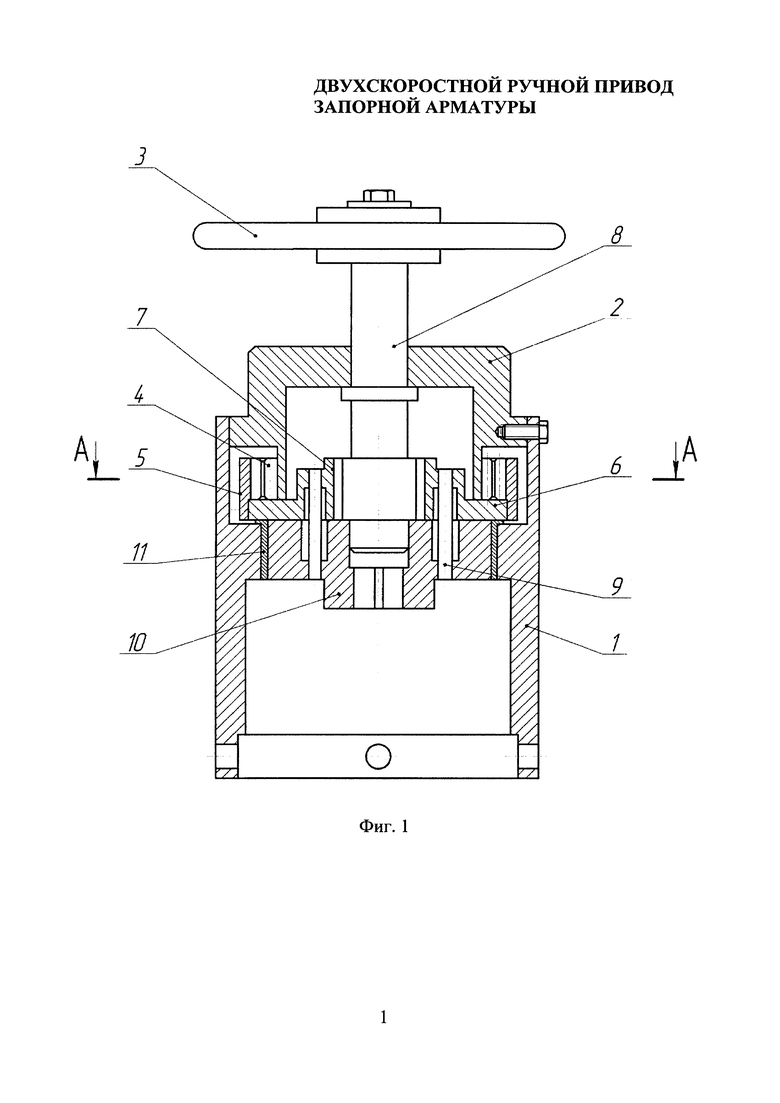
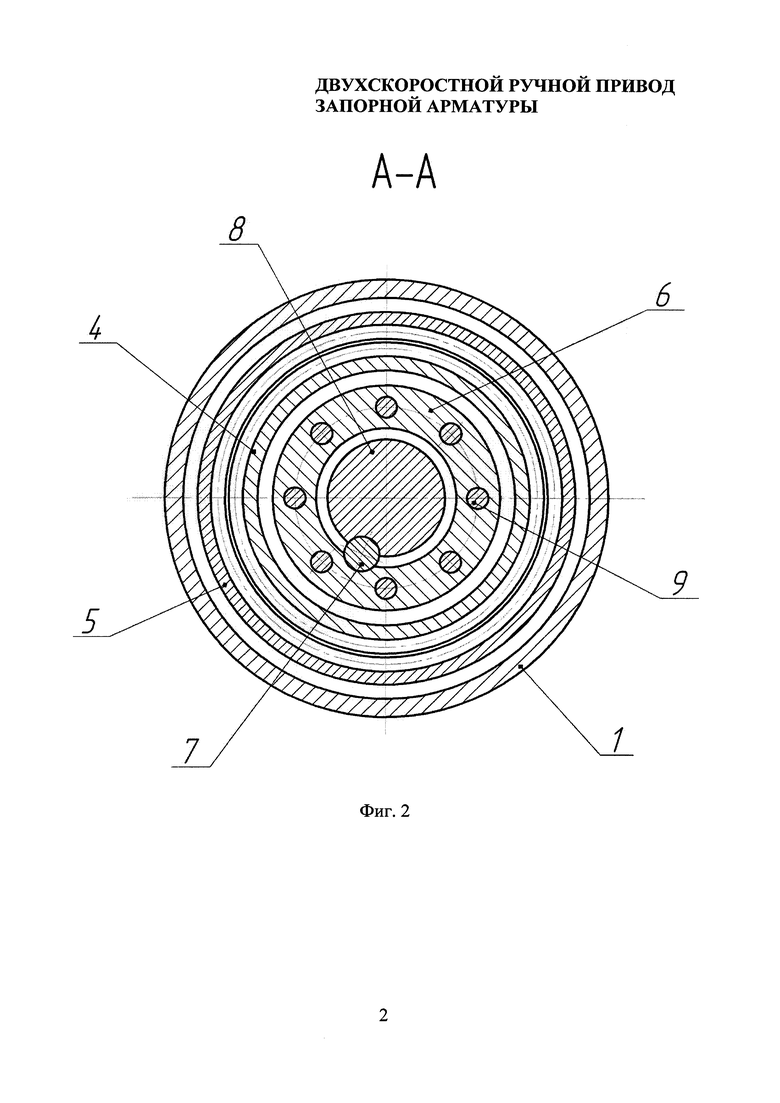
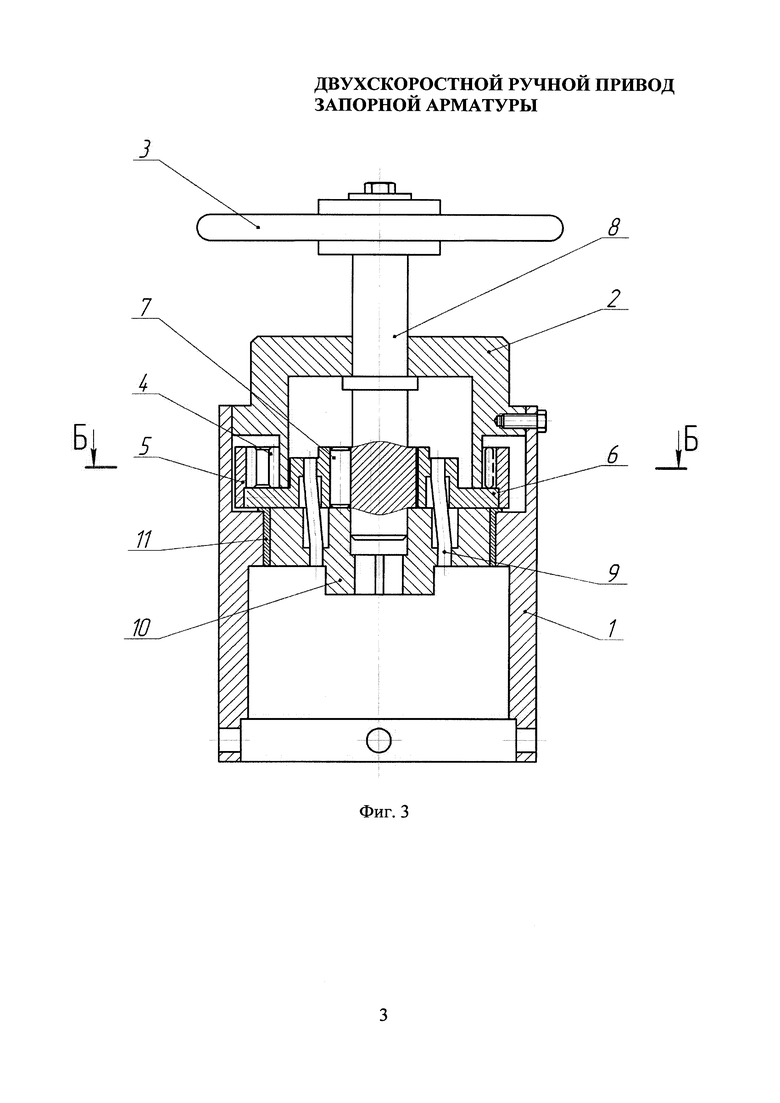
Сущность изобретения поясняется чертежами, где на фиг. 1 показан общий вид двухскоростного ручного привода запорной арматуры в разрезе при передаточном отношении планетарного механизма i, равном единице; на фиг. 2 - вид по А-А на фиг. 1; на фиг. 3 - общий вид двухскоростного ручного привода запорной арматуры в разрезе при передаточном отношении планетарного механизма  (Zg - число зубьев сателлита, Zb - число зубьев неподвижного колеса); на фиг. 4 - вид по Б-Б на фиг. 3.
(Zg - число зубьев сателлита, Zb - число зубьев неподвижного колеса); на фиг. 4 - вид по Б-Б на фиг. 3.
Двухскоростной ручной привод запорной арматуры содержит корпус 1, крышку 2, маховик 3, планетарный механизм, состоящий из неподвижного центрального колеса 4, сателлита 5, ступицы сателлита 6, цилиндрического ролика 7, ведущего вала 8, гибких стержней 9, ведомого вала-водила 10 и подшипника скольжения 11. Крышка 2 выполнена за одно целое с неподвижным центральным колесом 4, имеющим внешние зубья.
Сателлит 5 выполнен с внутренними зубьями. Ступица сателлита 6 содержит центральное цилиндрическое отверстие, продольный цилиндрический паз в нем и отверстия, число которых равно числу гибких стержней 9, а диаметр - диаметру гибких стержней 9. Ведущий вал 8 выполнен с продольным цилиндрическим пазом, радиус которого равен радиусам ролика 7 и продольного паза ступицы сателлита 6, а диаметр посадочной поверхности меньше диаметра центрального отверстия ступицы сателлита 6 на два межосевых расстояния планетарной передачи. Глубина продольного цилиндрического паза ступицы сателлита 6 равна межосевому расстоянию планетарной передачи. Глубина продольного цилиндрического паза ведущего вала 8 несколько больше глубины продольного цилиндрического паза ступицы сателлита 6. Ведомый вал-водило 10 содержит отверстия, число которых равно числу гибких стержней 9, а диаметр - диаметру гибких стержней 9.
Сателлит 5 жестко соединен со ступицей сателлита 6. Ролик 7 вставлен в продольный цилиндрический паз ведущего вала 8. Гибкие стержни 9 вставлены в отверстия ступицы сателлита 6 и ведомого вала-водила 10. Ведомый вал-водило 10 установлен посредством подшипника скольжения 11 в корпусе 1.
Сборка двухскоростного ручного привода запорной арматуры осуществляется в следующей последовательности.
В корпус 1 сажается подшипник скольжения 11, в котором располагается вал-водило 10. Сателлит 5 устанавливается и закрепляется на ступице сателлита 6. В отверстия вала-водила 10 вставляются гибкие стержни 9. Ступица сателлита 6 сажается отверстиями на гибкие стержни 9. Ролик 7 вставляется в продольный цилиндрический паз ведущего вала 8. Ведущий вал 8 вводится в посадочное отверстие вала-водила 10 так, чтобы ролик 7 вошел в продольный цилиндрический паз ступицы сателлита 6. Крышка 2 сажается одновременно на ведущий вал 8 и в корпус 1 и закрепляется в нем. Затем на ведущий вал 8 сажается и закрепляется на нем маховик 3.
Двухскоростной ручной привод запорной арматуры работает следующим образом.
При открытии задвижки для страгивания запорного органа арматуры (на чертежах условно не показаны) вращение от маховика 3 передается ведущему валу 8 и установленному в нем ролику 7, который давит на кромку продольного цилиндрического паза ступицы сателлита 6 и смещает сателлит 5 в радиальном направлении. При этом ролик 7 выходит из продольного цилиндрического паза ступицы сателлита 6, гибкие стержни 9 деформируются, сателлит 5 входит в зацепление с неподвижным центральным колесом 4 и при дальнейшем вращении маховика 3 и жестко связанного с ним ведущего вала 8 движение передается через сателлит 5, ступицу сателлита 6 и гибкие стержни 9 ведомому валу-водилу 10 и связанному с ним исполнительному механизму запорного органа (не показан) с увеличением крутящего момента. После страгивания запорного органа крутящий момент снижается, вращение маховика 3 и связанного с ним ведущего вала 8 до положения, когда ролик 7 встанет напротив продольного цилиндрического паза ступицы сателлита 6, приводит к тому, что гибкие стержни 9 выправляются, ступица сателлита 6 садится продольным цилиндрическим пазом на ролик 7, выводя сателлит 5 из зацепления с неподвижным центральным колесом 4, и движение от маховика 3 и ведущего вала 8 передается непосредственно ведомому валу-водилу 10 и исполнительному механизму с передаточным отношением, равным единице, что увеличивает скорость перемещения запорного органа.
При закрытии задвижки вращательное движение от маховика 3 передается непосредственно ведомому валу-водилу 10 и исполнительному механизму с передаточным отношением, равным единице, до соприкосновения запорного органа с корпусными деталями арматуры (не показаны). При дальнейшем вращении маховика 3 момент на ведущем валу 8 возрастает до тех пор, пока ролик 7 не выйдет из продольного цилиндрического паза ступицы сателлита 6, приводя к деформации гибкие стержни 9 и вхождению сателлита 5 в зацепление с неподвижным центральным колесом 4. Передача вращательного движения после этого происходит с увеличением крутящего момента, обеспечивая полное закрытие запорного органа.
Таким образом, применение в предлагаемом приводе планетарного механизма, состоящего из неподвижного центрального колеса 4 и сателлита 5 со ступицей 6, связанного посредством гибких стержней 9 с ведомым валом-водилом 10 и посаженного на ролик 7, расположенный в продольном пазу ведущего вала 8, снижает число деталей механизма, упрощает конструкцию привода, обеспечивает автоматическое переключение скорости планетарного механизма.
Источники информации
1. Пат. №2343329 РФ, МПК F16K 31/53. Двухскоростной ручной привод трубопроводной арматуры / Гольдфарб В.И., Громов Д.П., Трубачев Е.С. и др. Заяв. 06.07.2006. Опубл. 10.01.2009.
2. Пат. №2413114 РФ, МПК F16K 31/53. Привод двухскоростной ручной для запорно-регулирующей арматуры / Чернов А.В., Чернов П.А., Ротермель П.В. и др. Заяв. 14.08.2009. Опубл. 27.02.2011 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2019 |
|
RU2716781C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2019 |
|
RU2694385C1 |
| Двухскоростной ручной привод запорной арматуры | 2019 |
|
RU2725336C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2018 |
|
RU2701982C1 |
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| ДВУХСКОРОСТНОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2010 |
|
RU2433326C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2009 |
|
RU2454590C2 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2016 |
|
RU2641415C2 |

Изобретение относится к приводам трубопроводной запорной арматуры. Двухскоростной ручной привод запорной арматуры содержит корпус (1), крышку(2), маховик (3), планетарный механизм, включающий неподвижное центральное колесо с внешними зубьями (4), сателлит с внутренними зубьями (5), жестко связанный со ступицей (6), имеющей продольный цилиндрический паз, ролик (7), расположенный в пазу ведущего вала (8), гибкие стержни (9), соединяющие ступицу сателлита (6) с ведомым валом-водилом (10), посаженным на подшипник скольжения (11). Упрощение конструкции привода достигается выполнением планетарной передачи, содержащей небольшое число основных элементов: два зубчатых колеса (4) и (5), гибкие стержни (9), ведущий вал (8) с роликом (7) и ведомый вал-водило (10). Автоматическое переключение скорости обеспечивается деформацией гибких стержней (9), приводящей к вхождению в зацепление неподвижного центрального колеса (4) и сателлита (5) при большой нагрузке и выходу из зацепления при малой нагрузке. 4 ил.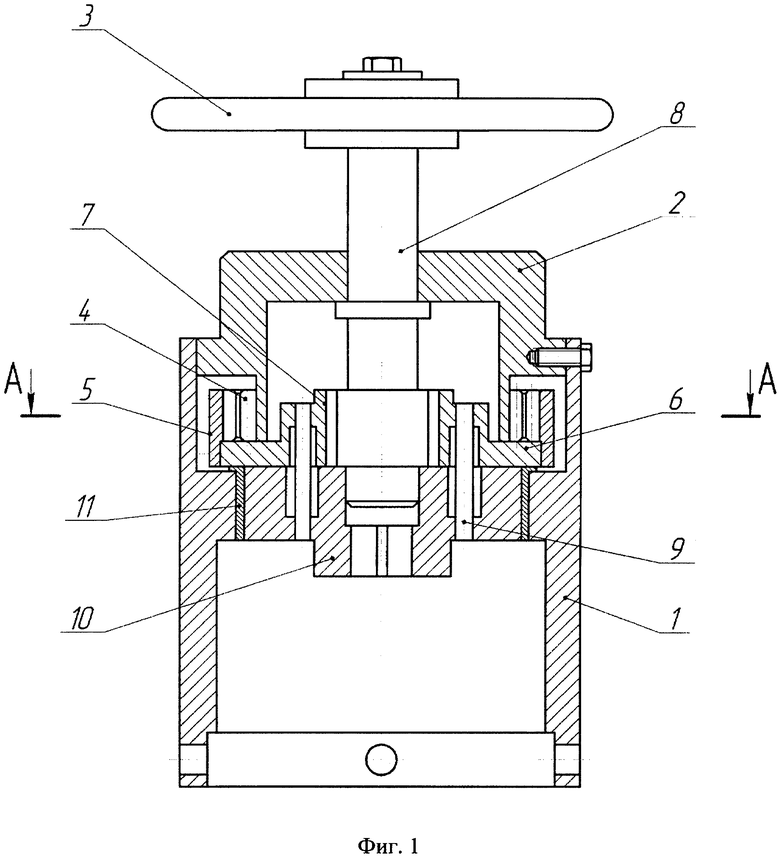
Двухскоростной ручной привод запорной арматуры, содержащий корпус, крышку, маховик и планетарный механизм, отличающийся тем, что планетарный механизм выполнен из установленного неподвижно в его корпусе центрального колеса с внешними зубьями и сателлита с внутренними зубьями и продольным пазом на внутренней поверхности ступицы, связанного посредством гибких стержней с ведомым валом-водилом и посаженного на ролик, расположенный в продольном пазу ведущего вала.
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2009 |
|
RU2454590C2 |
| Способ извлечения ниобия и титана | 1960 |
|
SU140210A1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2006 |
|
RU2343329C2 |
| ПРИВОД ДВУХСКОРОСТНОЙ РУЧНОЙ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ | 2009 |
|
RU2413114C1 |
| JP2000193136, 25.12.1998 | |||
| US0004754949, 08.09.1987. | |||

