Изобретение относится к средствам управления запорной арматурой, включающим в себя узлы управления зубчатой передачей, и может быть использовано в нефтегазовом машиностроении, а именно в приводах трубопроводной запорной арматуры.
Из уровня техники известен двухскоростной ручной привод запорной арматуры, содержащий корпус, крышку, жестко связанную с маховиком, планетарный механизм и переключатель скорости, выполненный в виде поворотного рычага, взаимодействующего с пазами на водиле и фланце солнечной шестерни планетарного механизма (RU 2343329 C1, МПК F16К 31/53, опубл. 10.01.2009).
Недостатками известного привода являются его сложность, обусловленная наличием большого числа зубчатых колес и сложного в изготовлении переключателя скорости, а также невозможность автоматического переключения скорости планетарного механизма, что создает неудобство в его эксплуатации.
Наиболее близким техническим решением к заявленному приводу и выбранным в качестве прототипа признан двухскоростной ручной привод запорной арматуры с автоматическим переключением скоростей (RU 2659681C1, МПК F16К 31/53, опубл. 03.07.2018). Привод содержит два полукорпуса, маховик, жестко связанный с ведущим валом-водилом, установленный на ведущем валу-водиле ролик, неподвижное колесо с внешними зубьями, подвижное колесо с внутренними зубьями и пазом на ободе, сопрягаемое с роликом и соединенное с ведомым звеном, узел упругой связи элементов привода, выполненный в виде набора стержней, расположенных в отверстиях подвижного колеса с внутренними зубьями и запрессованных другим концом в ведомое звено.
Недостатком этой конструкции является низкий уровень ее технологичности, связанный с применением в конструкции привода большого числа стержней и отверстий под них, требующих высокой степени точности изготовления.
Технической задачей, на решение которой направлено заявленное изобретение, является повышение уровня технологичности механизма.
Указанная задача решена тем, что двухскоростной ручной привод запорной арматуры содержит два полукорпуса, маховик, жестко связанный с ведущим валом-водилом, установленный на ведущем валу-водиле нажимной элемент, неподвижное колесо с внешними зубьями, подвижное колесо с внутренними зубьями, сопрягаемое ступицей с нажимным элементом и соединенное посредством упругой связи с ведомым звеном. Отличает привод от аналогов то, что узел упругой связи выполнен в виде центрального стержня, одним концом жестко соединенного с ведомым звеном, а другим концом связанного со ступицей подвижного колеса с внутренними зубьями посредством угловой муфты.
Положительным техническим результатом, обеспечиваемым раскрытыми выше конструктивными признаками механизма, является повышение технологичности привода, который обеспечивается выполнением узла упругой связи в виде одного центрального стержня.
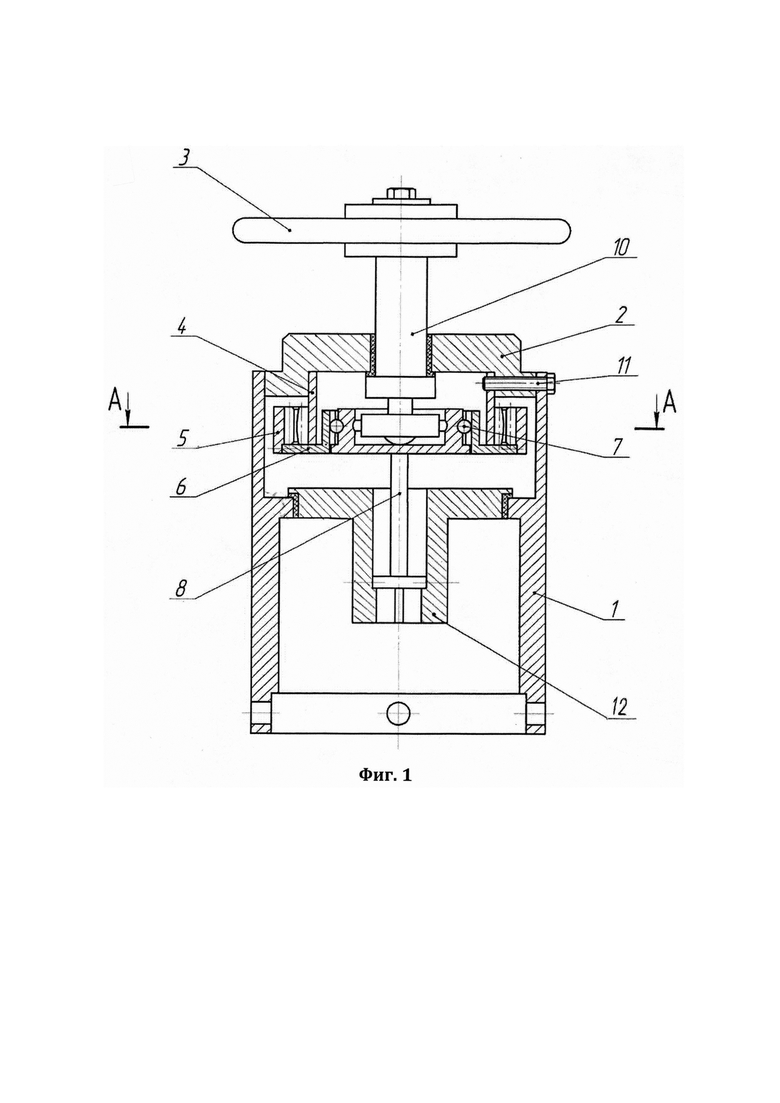
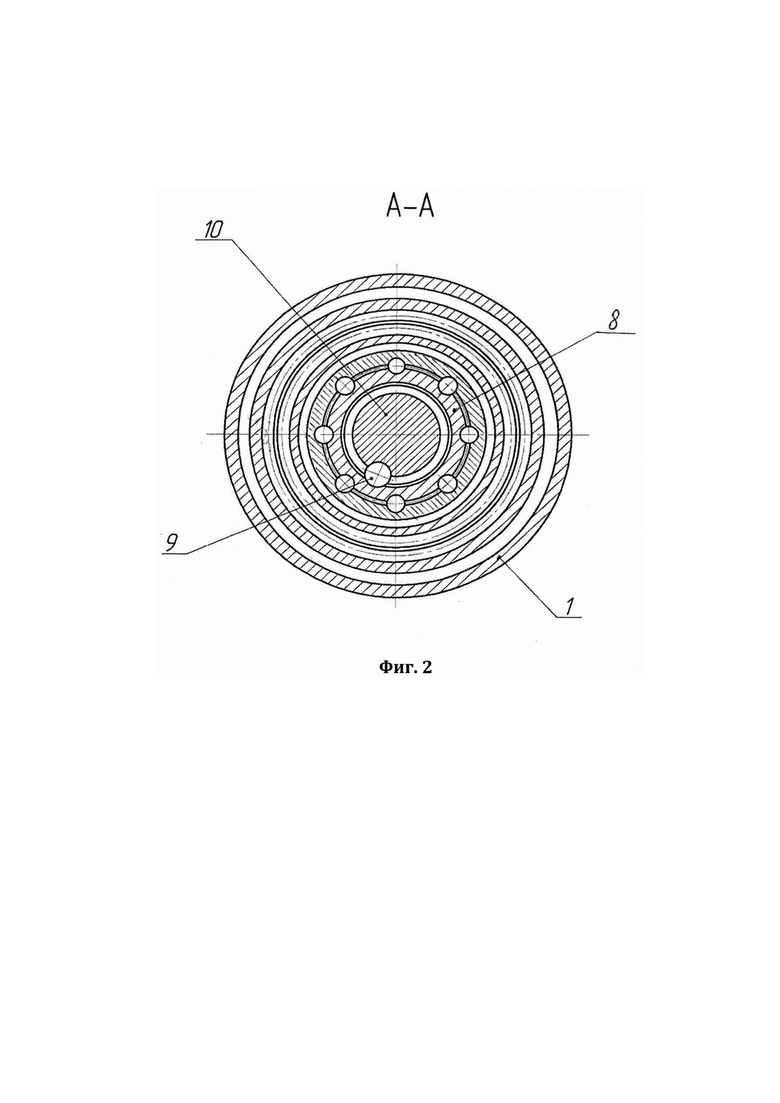
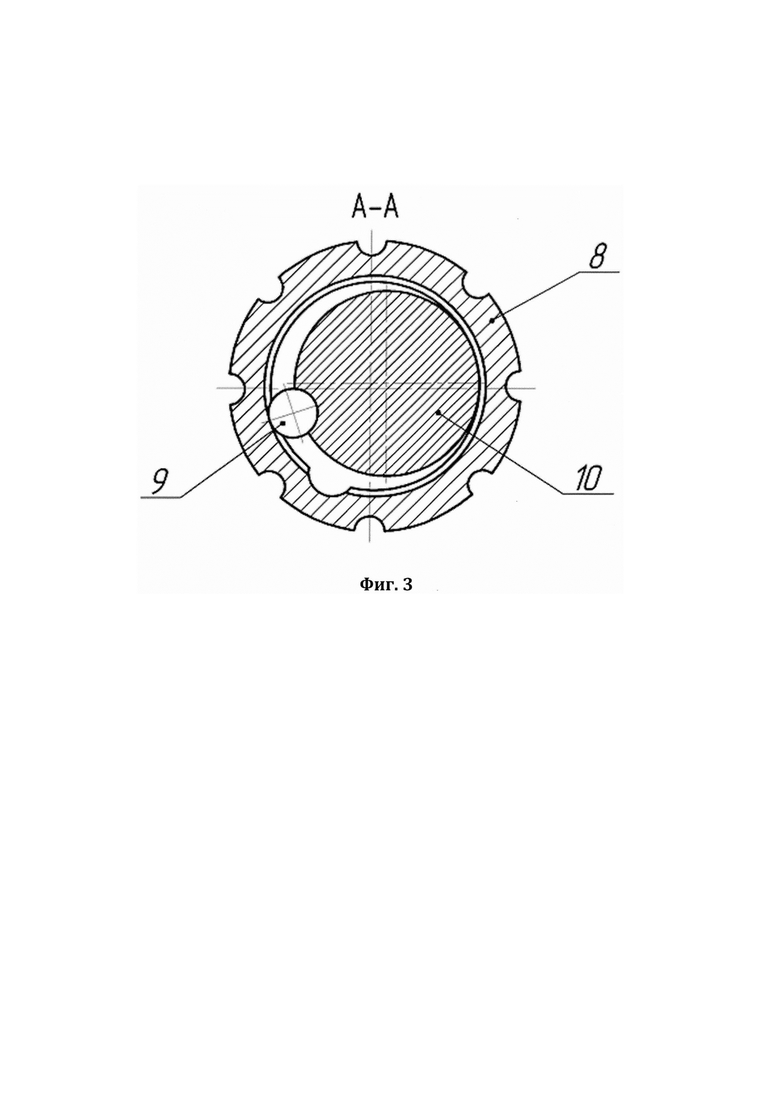
Конструкция привода поясняется чертежами, где на фиг.1 показан общий вид двухскоростного ручного привода запорной арматуры в разрезе при работе в режиме передачи движения непосредственно от маховика к ведомому звену через нажимной элемент и центральный стержень (при небольшой нагрузке); на фиг. 2 - вид по А-А на фиг 1; на фиг. 3 - вид по А-А ведущего вала-водила, нажимного элемента и концевой части центрального стержня при передаче движения от маховика ведомому звену посредством зубчатого зацепления подвижного колеса с внутренними зубьями и неподвижного колеса с внешними зубьями и работе механизма в режиме редуктора (при большой нагрузке).
Двухскоростной ручной привод запорной арматуры состоит из полукорпусов 1 и 2, маховика 3, неподвижного колеса с внешними зубьями 4, подвижного колеса с внутренними зубьями 5, ступицы подвижного колеса с внутренними зубьями 6, шариков угловой муфты 7, центрального стержня 8, нажимного элемента 9, ведущего вала-водила 10, крепежного элемента 11, ведомого звена 12.
Нажимной элемент 9 выполнен в виде шарика, а ведущий вал-водило 10 - со сферическим углублением, при этом радиус углубления соответствует радиусу нажимного элемента 9, а его глубина равна межосевому расстоянию привода при работе в режиме редуктора. Ступица подвижного колеса с внутренними зубьями 6 выполнена с цилиндрическими пазами, а центральный стержень 8 со сферическими углублениями на внешней поверхности, причем радиусы пазов и углублений равны радиусу шариков 7, которые вместе с сопрягаемыми элементами составляют угловую муфту.
Неподвижное колесо с внешними зубьями 4 установлено в полукорпусе 2. Центральный стержень 8 жестко соединен с ведомым звеном 12. Подвижное колесо с внутренними зубьями 5 жестко соединено с его ступицей 6 и через шарики угловой муфты 7 связано с центральным стержнем 8, а через него с ведомым звеном 12.
Сборка двухскоростного ручного привода запорной арматуры осуществляется в следующей последовательности.
Центральный стержень 8 крепится к ведомому звену 12, которое устанавливается в полукорпусе 1. К подвижному колесу с внутренними зубьями 5 крепится его ступица 6 и сажается на шарики угловой муфты 7, предварительно установленные в углубления концевой части центрального стержня 8. Ведущий вал-водило 10 с установленным в его углублении нажимным элементом 9 вводится во внутреннюю полость концевой части центрального стержня 8. Неподвижное колесо с внешними зубьями 4 вводится внутрь подвижного колеса с внутренними зубьями 5. Полукорпус 2 сажается одновременно на ведущий вал-водило 10, на обод неподвижного колеса с внешними зубьями 4 и в полукорпус 1. Обод неподвижного колеса с внешними зубьями 4 и полукорпусы 1, 2 скрепляются крепежным элементом 11. После этого на ведущий вал-водило 10 сажается и крепится к нему маховик 3.
Для предотвращения заклинивания привода при его работе в режиме редуктора (при большой нагрузке) и повышения надежности механизма поверхность вершин зубьев неподвижного колеса с внешними зубьями 4 может быть выполнена сферической, а зазор между вершинами внутренних зубьев подвижного колеса 5 и впадинами неподвижного колеса с внешними зубьями 4 увеличенным.
Двухскоростной ручной привод запорной арматуры работает следующим образом.
При большой нагрузке на рабочем органе запорной арматуры (не показан) для его страгивания с места в момент открытия вращение от маховика 3 передается ведущему валу-водилу 10 и установленному в нем нажимному элементу 9, который давит на кромку продольного цилиндрического паза на концевой части центрального стержня 8, выходит из него, деформирует центральный стержень 8 и через шарики угловой муфты 7 смещает в радиальном направлении подвижное колесо с внутренними зубьями 5 и его ступицу 6 так, что подвижное колесо с внутренними зубьями 5 входит в зацепление с неподвижным колесом с внешними зубьями 4. При дальнейшем вращении маховика 3 и жестко связанного с ним ведущего вала-водила 10 движение передается через подвижное колесо с внутренними зубьями 5, его ступицу 6 и шарики угловой муфты 7 центральному стержню 8, ведомому звену 12 и связанному с ним рабочему органу с большим крутящим моментом, но малой скоростью. Привод в этом случае работает в режиме планетарного редуктора с передаточным отношением

где Z4 - число зубьев неподвижного колеса 4, Z5 - число зубьев подвижного колеса 5.
После страгивания рабочего органа с места крутящий момент снижается, вращение маховика 3 и связанного с ним ведущего вала-водила 10 до положения, когда нажимной элемент 9 встанет напротив продольного цилиндрического паза на концевой части центрального стержня 8, приводит к тому, что центральный стержень 8 выправляется, смещая подвижное колесо с внутренними зубьями 5, выводя подвижное колесо с внутренними зубьями 5 из зацепления с неподвижным колесом с внешними зубьями 4, нажимной элемент 9 при этом садится в сферическое углубление концевой части центрального стержня 8, и дальнейшее движение от маховика 3 и ведущего вала-водила 10 передается ведомому звену 12 и рабочему органу с передаточным отношением i=1, что увеличивает скорость перемещения запорного органа. При этом деформация центрального стержня 8 имеет небольшое значение, и радиальное смещение подвижного колеса с внутренними зубьями 5 не превышает первоначального зазора между вершинами зубьев подвижного и неподвижного колес 5 и 4.
При закрытии рабочего органа арматуры вначале имеет место небольшой крутящий момент и вращательное движение от маховика 3 передается ведомому звену 12 с передаточным отношением, равным единице, до соприкосновения рабочего органа с корпусными деталями арматуры (не показаны). При дальнейшем вращении маховика 3 момент на ведущем валу-водиле 10 возрастает до тех пор пока нажимной элемент 9 не выйдет из продольного цилиндрического паза на концевой части центрального стержня 8, приводя к деформации центральный стержень 8 и вхождению подвижного колеса с внутренними зубьями 5 в зацепление с неподвижным колесом с внешними зубьями 4. Передача вращательного движения после этого происходит с увеличением крутящего момента, обеспечивая полное закрытие запорного органа.
Таким образом, выполнение узла упругой связи двухскоростного ручного привода запорной арматуры в виде центрального стержня 8, жестко соединенного с ведомым звеном 12 и связанного с подвижным колесом с внутренними зубьями 5 посредством угловой повышает уровень технологичности механизма, а выполнение поверхности вершин зубьев неподвижного колеса с внешними зубьями 4 сферической и увеличение зазора между вершинами внутренних зубьев подвижного колеса 5 и впадинами неподвижного колеса с внешними зубьями 4 позволяет предотвратить заклинивание механизма и повысить его надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2018 |
|
RU2701982C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2019 |
|
RU2694385C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2017 |
|
RU2659681C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2019 |
|
RU2716781C1 |
| ДВУХСКОРОСТНОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2010 |
|
RU2433326C1 |
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| РУЧНОЙ ДВУХСКОРОСТНОЙ ПРИВОД ДЛЯ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2008 |
|
RU2378555C2 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1996 |
|
RU2076255C1 |
| РУЧНОЙ ПРИВОД ДЛЯ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2013 |
|
RU2527225C1 |
| КОЛЕСНАЯ БРОНЕМАШИНА | 2005 |
|
RU2314478C2 |
Изобретение относится к средствам управления запорной арматурой, включающим в себя узлы управления зубчатой передачей. Техническая задача изобретения, совпадающая с положительным результатом от его применения, - повышение уровня технологичности механизма. Двухскоростной ручной привод запорной арматуры содержит два полукорпуса, маховик, жестко связанный с ведущим валом-водилом, установленный на ведущем валу-водиле нажимной элемент, неподвижное колесо с внешними зубьями, подвижное колесо с внутренними зубьями, сопрягаемое ступицей с нажимным элементом и соединенное посредством упругой связи с ведомым звеном. Отличает привод от аналогов то, что узел упругой связи выполнен в виде центрального стержня, одним концом жестко соединенного с ведомым звеном, а другим концом связанного со ступицей подвижного колеса с внутренними зубьями посредством угловой муфты. 1 з.п. ф-лы, 3 ил.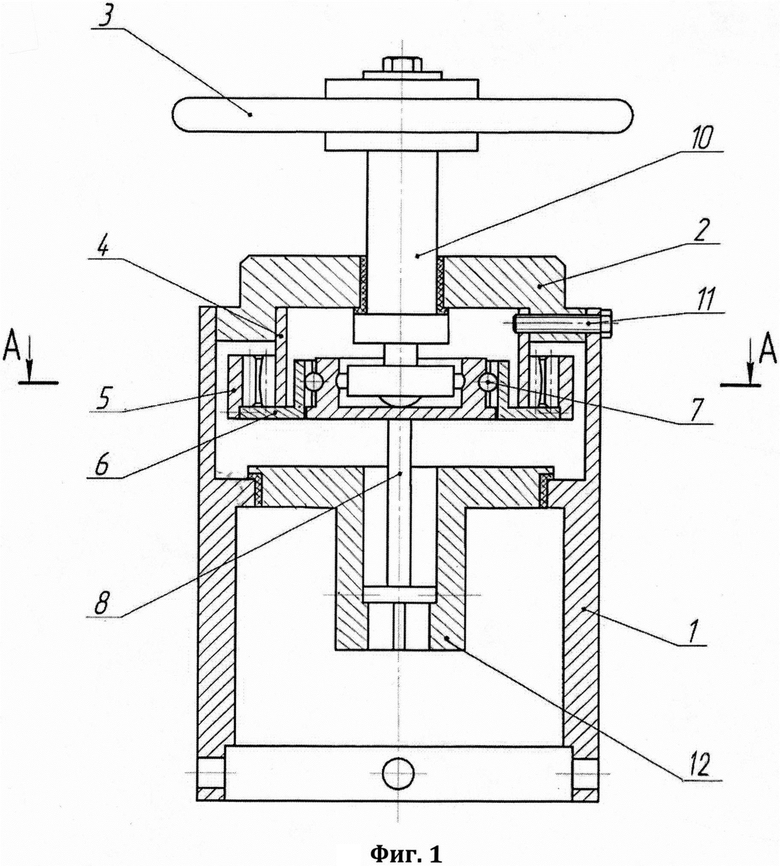
1. Двухскоростной ручной привод запорной арматуры, содержащий два полукорпуса, маховик, жестко связанный с ведущим валом-водилом, установленный на ведущем валу-водиле нажимной элемент, неподвижное колесо с внешними зубьями, подвижное колесо с внутренними зубьями, сопрягаемое ступицей с нажимным элементом и соединенное посредством упругой связи с ведомым звеном, отличающийся тем, что узел упругой связи выполнен в виде центрального стержня, одним концом жестко соединенного с ведомым звеном, а другим концом связанного со ступицей подвижного колеса с внутренними зубьями посредством угловой муфты.
2. Двухскоростной ручной привод запорной арматуры по п. 1, отличающийся тем, что поверхность вершин внешних зубьев неподвижного колеса выполнена сферической, а зазор между вершинами внутренних зубьев подвижного колеса и впадинами неподвижного колеса увеличенным.
| JP 4387481 B2, 09.10.2009 | |||
| DE 3912464 A1, 18.10.1990 | |||
| Устройство для кормления рыбы в рыбоводных прудах | 1981 |
|
SU1026735A1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2017 |
|
RU2659681C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2016 |
|
RU2641415C2 |
| ПРИВОД ДВУХСКОРОСТНОЙ РУЧНОЙ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ | 2009 |
|
RU2413114C1 |

