Устройство относится к радиотехнике и предназначено для приема радиоволн сверхнизких и крайне низких частот (СНЧ и КНЧ) в морской среде при радиосвязи с движущимся подводным объектом.
Электрическое поле электромагнитной волны в морской воде, являющейся проводящей средой, порождает токи проводимости. Последние между двумя точками среды создают разность потенциалов, которая может быть передана на приемное устройство антенной, в качестве которой часто используют электродный датчик электрического поля. Электродный датчик представляет собой два разнесенных на некоторое расстояние электрода, имеющих электрический контакт с окружающей морской водой.
Известно устройство для приема электромагнитного поля в море, содержащее электродный датчик электрического поля, соединенный через предварительный усилитель с приемным блоком (В.Г. Максименко, В.И. Нарышкин. «Шум движения» электродных датчиков электрического поля в море и пути его уменьшения // Радиотехника и электроника. - 2003. - Т. 48, №1. - С. 70-76). При этом датчик выполнен в виде установленных на жесткой диэлектрической платформе на расстоянии порядка одного метра друг от друга двух металлических электродов. Датчик вместе с предварительным усилителем буксируется за кораблем. Выходное напряжение с предварительного усилителя по кабелю передается на приемный блок, установленный на корабле. Недостатком аналога является невысокая чувствительность, что обусловлено небольшим расстоянием между электродами при большом уровне так называемого «шума движения», то есть шума электродного датчика, обусловленного движением его в морской среде.
Известно приемное устройство для радиосвязи с подводным объектом, (Бернстайн С.Л. и др. Дальняя связь на крайне низких частотах (обзор) // ТИИЭР. - 1974. - Т. 62, №3. - С. 5-30), содержащее электродный датчик электрического поля в виде двух металлических электродов, установленных на буксируемом за подводным объектом гибком кабеле, предварительный усилитель и приемный блок, в котором осуществляется усиление и выделение полезного сигнала из шумов. Известное устройство используется для радиосвязи с погруженными в море объектами в диапазоне КНЧ и СНЧ. Как наиболее близкое по технической сущности к заявленному оно принято за прототип. Недостатком известного устройства являются его большие габариты, что создает проблемы при эксплуатации. Для достижения требуемой чувствительности расстояние между электродами составляет 200…300 метров. Электроустановки, расположенные на борту подводного объекта, создают переменные магнитные поля, возбуждающие в морской воде переменное электрическое поле индустриальной помехи. Спектр частот передаваемого сигнала занимает узкую полосу вблизи несущей частоты, которая имеет порядок нескольких десятков герц. Спектр частот индустриальной помехи перекрывается со спектром принимаемого сигнала, поэтому для уменьшения индустриальной помехи до приемлемого уровня активную часть кабельной антенны относят от подводного объекта так, чтобы ближний электрод находился от него на расстоянии 200…300 метров. При этом общая длина кабельной антенны достигает 600 метров.
Технической задачей, решаемой в заявленном устройстве, является улучшение эксплуатационных характеристик за счет уменьшения длины кабельной антенны.
Поставленная задача решается тем, что в приемное устройство для радиосвязи с подводным объектом, содержащее первый электродный датчик электрического поля в виде первого и второго электродов, установленных на буксируемом за подводным объектом гибком кабеле и соединенных через провода кабеля с предварительным усилителем, и установленный на подводном объекте приемный блок введены первый и второй узкополосные фильтры, управляемый усилитель, управляемый фазовращатель, блок вычитания, блок экстремального регулирования и второй электродный датчик в виде установленных на том же кабеле ближе к подводному объекту третьего и четвертого электродов, через первый узкополосный фильтр соединенных с управляемым усилителем, выход которого через управляемый фазовращатель соединен с первым входом блока вычитания, второй вход которого через второй узкополосный фильтр соединен с выходом предварительного усилителя, выход блока вычитания соединен с приемным блоком и первым входом блока экстремального регулирования, второй вход которого соединен с выходом первого узкополосного фильтра, первый выход блока экстремального регулирования соединен с управляющим входом управляемого усилителя, а второй выход - с управляющим входом управляемого фазовращателя, причем расстояние между третьим и четвертым электродами меньше, чем между первым и вторым электродами.
Блок экстремального регулирования содержит генератор тактовых импульсов, выход которого соединен с входом триггера, первый и второй интеграторы, первый и второй управляемые ключи, перемножитель, первый вход которого является первым входом блока экстремального регулирования, второй его вход является вторым входом блока экстремального регулирования, выход перемножителя через первый управляемый ключ соединен с входом первого интегратора, а через второй управляемый ключ соединен с входом второго интегратора, управляющие входы управляемых ключей соединены с выходами триггера, при этом выходы первого и второго интеграторов являются соответственно первым и вторым выходом блока экстремального регулирования.
Источник индустриальной помехи на подводном объекте можно представить в виде рамки с переменным током. Возбуждаемая рамкой электромагнитная волна, распространяясь вдоль кабельной антенны, испытывает в морской воде сильное затухание. Поэтому напряженность электрического поля индустриальной помехи уменьшается по мере удаления от подводного объекта. Принимаемая же электромагнитная волна (полезный сигнал) распространяется из атмосферы вглубь моря таким образом, что ее плоский фронт параллелен поверхности воды. Поскольку и кабельная антенна практически параллельна поверхности воды, то величина напряженности электрического поля полезного сигнала одинакова во всех точках антенны. Это дает возможность осуществить компенсацию индустриальной помехи. Для получения компенсационного напряжения на пассивной части кабеля имеющейся кабельной антенны, то есть ближе к подводному объекту, установлены еще два электрода, образующие второй, компенсационный, электродный датчик. Расстояние между электродами второго датчика может быть на порядок меньше, чем между электродами первого датчика, так как напряженность электрического поля индустриальной помехи здесь достаточно велика. Следовательно, и принимаемое на второй датчик напряжение сигнала тоже на порядок меньше, чем принимаемое на первый датчик. После фазирования и уравнивания амплитуд компенсационное напряжение со второго датчика вычитается из напряжения, поступающего с первого датчика. Потери полезного сигнала при этом не превышают 10%. Зато длину пассивной части кабельной антенны можно уменьшить с 200…300 метров до 100 м и менее.
В общем случае источник индустриальной помехи, в качестве которого обычно выступает силовое электрооборудование, создает негармоническое переменное магнитное поле, одна из гармоник которого близка по частоте к принимаемому сигналу, поэтому не может быть отфильтрована в приемнике частотным фильтром. Представим источник индустриальной помехи в виде рамки площадью S с переменным током амплитудой Im и круговой частотой ω. В направлении максимума диаграммы направленности комплексная амплитуда напряженности электрического поля на расстоянии r от центра рамки [В.А. Неганов, О.В. Осипов, С.Б. Раевский, Г.П. Яровой. Электродинамика и распространение радиоволн. М.: «Радиотехника», 2007]

где i - мнимая единица, μ0=4π⋅10-7 Гн/м - магнитная постоянная. k - волновое число в морской воде. Волновое число в проводящей среде является комплексной величиной
k=k'-ik'', где  . Здесь
. Здесь  - толщина скин-слоя. При стандартной проводимости воды в океане σ=4 См/м и частоте ƒ=76 Гц (такую частоту использовали в ВМФ США для связи с подводной лодкой) толщина скин-слоя составляет 29 м, длина волны составляет 182 м. Теперь выражение (1) можно переписать в виде
- толщина скин-слоя. При стандартной проводимости воды в океане σ=4 См/м и частоте ƒ=76 Гц (такую частоту использовали в ВМФ США для связи с подводной лодкой) толщина скин-слоя составляет 29 м, длина волны составляет 182 м. Теперь выражение (1) можно переписать в виде

С ошибкой, не превышающей 0,5%, в диапазоне r от 75 до 400 метров точные выражения можно аппроксимировать более простыми приближенными.
В результате для комплексной амплитуды электрического поля индустриальной помехи получаем более простое выражение.

Переходя от комплексной амплитуды к функции времени, получим

Таким образом, напряженность электрического поля индустриальной помехи с увеличением расстояния r уменьшается и приобретает фазовый сдвиг. Чтобы разделить функции времени и расстояния, косинус в выражении (4) удобно представить в виде

Напряжение индустриальной помехи между электродами кабельной антенны, находящимися на расстояниях r1 и r2 от центра рамки с током, определяется интегралом

С учетом (4-6) получим:

Вычислим напряжение индустриальной помехи на компенсационном датчике. Пусть значения r1 и r2 составляют соответственно 90 м и 100 м.

Напряжение индустриальной помехи на активной части кабельной антенны, электроды которой расположены на расстояниях r1=100 м и r2=400 м,

Напряжение на компенсационном датчике представляет собой гармоническое колебание, по амплитуде в 1,4 раза меньшее, а по фазе опережающее на 0,84 радиана напряжение помехи на активной части кабельной антенны. Это означает возможность компенсации (вычитания) индустриальной помехи при уравнивании амплитуд и фаз, причем можно использовать только три электрода, электроды 3 и 4 можно объединить. То есть электрод на отметке 100 м можно использовать как для приема сигнала, так и для получения компенсирующего напряжения. Общая длина кабельной антенны составляет 400 м.
Оценим уменьшение полезного сигнала после компенсации помехи. Напряжение полезного сигнала, снимаемое с активной части кабельной антенны длиной l1, запишем в виде:

Напряжение сигнала, поступающее для вычитания с компенсационного датчика, с учетом его длины l2=0,1l1 и уравнивания амплитуд и фаз помехи

После вычитания получаем
UC1-UC2=0,912Um(sinωt+0,115).
Имеем уменьшение напряжения принимаемого сигнала около 9 процентов.
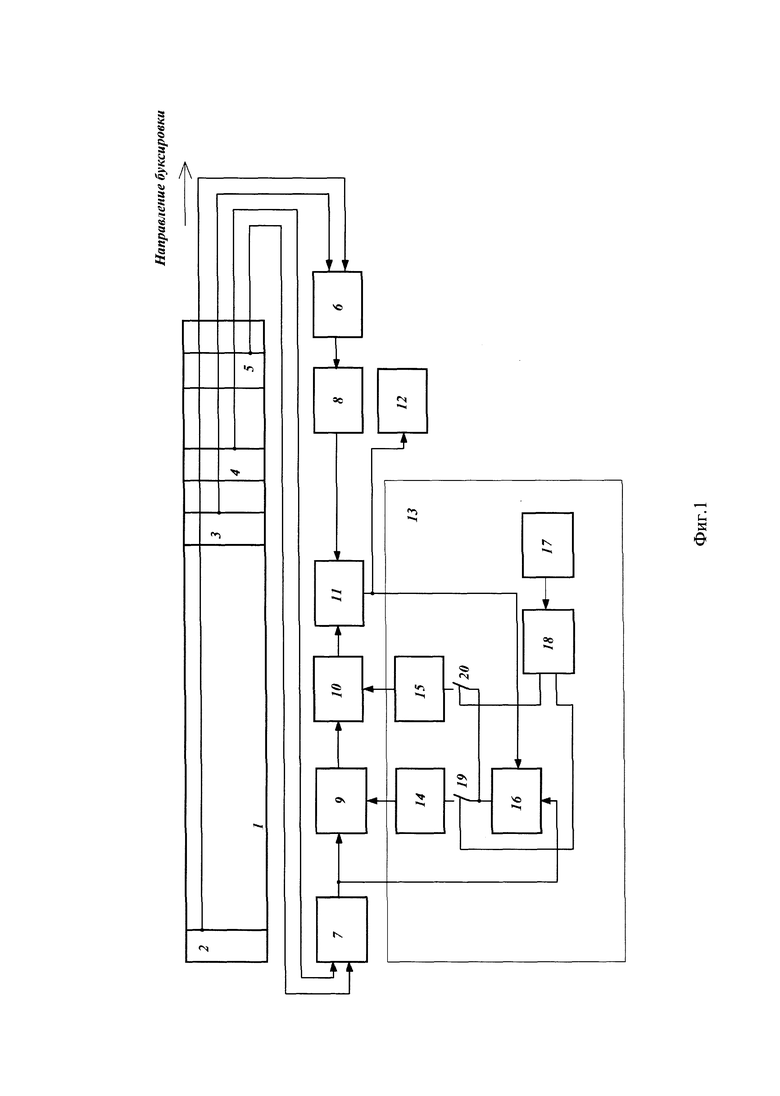
Приемное устройство для радиосвязи с подводным объектом изображено на фиг. 1. Оно содержит четырехжильный гибкий кабель 1, первый электрод 2 и второй электрод 3, образующие первый датчик электрического поля (активную часть кабельной антенны), третий электрод 4 и четвертый электрод 5, образующие второй (компенсационный) датчик электрического поля, предварительный усилитель 6, первый узкополосный фильтр 7, второй узкополосный фильтр 8, управляемый усилитель 9, управляемый фазовращатель 10, блок вычитания 11, приемный блок 12 и блок экстремального регулирования 13. Блок экстремального регулирования 13 содержит первый и второй интеграторы 14 и 15, перемножитель 16, генератор тактовых импульсов 17, триггер 18, первый и второй управляемые ключи 19 и 20.
Устройство работает следующим образом. Напряжение, снимаемое с электродов 2 и 3, усиливается предварительным усилителем 6 и через второй узкополосный частотный фильтр 8 поступает на первый вход блока вычитания 11. Фильтр 8 пропускает узкую полосу частот в окрестностях несущей частоты принимаемого сигнала (в нашем случае это частота 76 Гц). Напряжение, снимаемое с электродов 4 и 5, через последовательно включенные первый узкополосный частотный фильтр 7, управляемый усилитель 9 и управляемый фазовращатель 10, поступает на второй вход блока вычитания 11. Первый и второй узкополосные фильтры идентичны, их полоса пропускания согласована со спектром принимаемого сигнала. Применение узкополосных фильтров позволяет гармонизировать помеху, то есть превратить ее в переменное напряжение с фиксированной частотой, что дает возможность осуществить компенсацию. В частности, дает возможность осуществить фазирование помехи, поступающей на вычитание от активной части кабельной антенны и компенсационного датчика, т.к. поворот фазы в управляемом фазовращателе 10 обычно зависит от частоты. Управляемый фазовращатель известен из литературы (авторское свидетельство СССР №1667222, опубл. в БИ №28 30.07.1991). С выхода блока вычитания 11 напряжение поступает на приемный блок 12 и на первый вход блока экстремального регулирования 13, первый и второй выходы которого соединены соответственно с управляющими входами управляемого усилителя 9 и управляемого фазовращателя 10. Блок экстремального регулирования вырабатывает напряжения, управляющие коэффициентом усиления управляемого усилителя 9 и поворотом фазы управляемого фазовращателя 10 до достижения минимального значения напряжения на выходе блока вычитания 11. На его выходе остается напряжение сигнала с помехами естественного происхождения и индустриальные помехи, скомпенсировать которые не удается. Приемный блок 12 осуществляет дополнительное усиление, частотную фильтрацию принимаемого сигнала и выделение полезной информации.
Блок экстремального регулирования работает циклически. В исходном состоянии коэффициент усиления управляемого усилителя 9 минимален. Фазовый сдвиг в управляемом фазовращателе 10 тоже минимален. Генератор тактовых импульсов 17 генерирует короткие импульсы с периодом следования порядка десяти секунды и запускает триггер 18. Импульсы на выходах триггера 18 имеют такую же длительность, которая определяет длительность одного цикла регулирования. Рассмотрим первую половину первого цикла (первый такт) работы блока экстремального регулирования.
На первом выходе триггера 18 в исходном состоянии присутствует напряжение, замыкающее ключ 19. Ключ 20 разомкнут.
Напряжения с выхода блока вычитания 11 и с выхода узкополосного фильтра 7 поступают соответственно на первый и второй вход перемножителя 16. Перемножитель 16 вместе с интегратором 14 образуют коррелометр, на выходе которого формируется медленно меняющееся напряжение, пропорциональное значению функции взаимной корреляции  поступающих на него напряжений U(t) - с выхода блока вычитания 11 и S(t) - с выхода узкополосного фильтра 7. Коррелометр выполнен известным образом (Вибрации в технике: Справочник. Под ред. М.Д. Генкина. Т. 5. - М.: Машиностроение. 1981). Время задержки τ мы полагаем равным нулю, поскольку временной сдвиг между напряжениями индустриальной помехи на выходе фильтров 7 и 8 отсутствует. Время усреднения Т определяется постоянной времени интегратора.
поступающих на него напряжений U(t) - с выхода блока вычитания 11 и S(t) - с выхода узкополосного фильтра 7. Коррелометр выполнен известным образом (Вибрации в технике: Справочник. Под ред. М.Д. Генкина. Т. 5. - М.: Машиностроение. 1981). Время задержки τ мы полагаем равным нулю, поскольку временной сдвиг между напряжениями индустриальной помехи на выходе фильтров 7 и 8 отсутствует. Время усреднения Т определяется постоянной времени интегратора.
Коррелометр работает следующим образом. Напряжения U(t) и S(t) перемножаются в перемножителе 16. Пусть оба эти напряжения имеют синусоидальную форму: U(t)=Umsinωt, S(t)=Smsinωt. Тогда выходное напряжение перемножителя U(t)S(t)=0,5UmSm(1-cos2ωt) содержит две составляющие: постоянная составляющая 0,5UmSm и переменная составляющая с частотой 2ω. В интеграторе 14, который представляет собой фильтр нижних частот с большой постоянной времени Т, переменная составляющая усредняется. Постоянная составляющая выходного напряжения перемножителя 16 дает на выходе интегратора 14 медленно увеличивающееся напряжение. Составляющая выходного напряжения перемножителя 16, обусловленная некоррелированными напряжениями на его входах, имеет вид переменного случайного напряжения с нулевым средним, поэтому она усредняется в интеграторе. Таким образом, на выходе интегратора 14 имеется медленно растущее постоянное напряжение, которое подается на управляющий вход регулируемого усилителя 9 и увеличивает его коэффициент усиления. При этом компенсирующее напряжение на выходе усилителя 9 становится ближе по величине к составляющей выходного напряжения узкополосного фильтра 8, обусловленной индустриальной помехой. Блок вычитания 11 осуществляет не полное вычитание этих напряжений, но его в его выходном напряжении составляющая, обусловленная индустриальной помехой, уменьшается. Время усреднения Т должно быть больше длительности цикла, чтобы по окончании одного цикла коэффициент корреляции между напряжениями U(t) и S(t) не был равен нулю.
Во второй половине первого цикла (во втором такте) работы блока экстремального регулирования происходит регулировка фазы компенсирующего напряжения. Импульс с выхода тактового генератора 17 вызывает срабатывание триггера 18, в результате чего ключ 20 замыкается, а ключ 19 размыкается. Напряжение на выходе интегратора 14 перестает изменяться. Коэффициент усиления управляемого усилителя 9 остается постоянным. Регулирование поворота фазы в управляемом фазовращателе 10 происходит под действием выходного напряжения интегратора 15, который вместе с перемножителем 16 также образует коррелометр, работа которого описана выше. Поскольку постоянная составляющая выходного напряжения перемножителя в начале второго такта не равна нулю, то выходное напряжение интегратора 15 растет. При этом растет фазовый сдвиг в управляемом фазовращателе 10. Составляющая, обусловленная индустриальной помехой, в выходном напряжении блока вычитания 11 уменьшается. В результате за время второго такта уменьшается и постоянная составляющая выходного напряжения перемножителя 16.
После следующего срабатывания триггера начинается очередной цикл работы блока экстремального регулирования, в котором рост коэффициента усиления управляемого усилителя 9 и фазового сдвига в управляемом фазовращателе 10 происходит медленнее. Коэффициент корреляции поступающих на входы перемножителя 16 напряжений продолжает уменьшаться. Через несколько циклов на выходе блока вычитания 11 напряжение индустриальной помехи практически отсутствует. Постоянная составляющая выходного напряжения перемножителя 16 становится равной нулю. Выходные напряжения интеграторов 14 и 15, а также и коэффициент усиления усилителя 9 и поворот фазы в фазовращателе 10, перестают изменяться. Если по каким-то причинам произойдет перекомпенсация помехи, то постоянная составляющая выходного напряжения перемножителя поменяет знак. При этом выходное напряжение интегратора начнет уменьшаться. Так будет происходить до тех пор, пока коэффициент корреляции между выходным напряжением блока вычитания 11 и напряжением на выходе фильтра 8 не станет близок к нулю.
Технический результат, достигаемый при применении предложенного устройства, состоит в уменьшении длины кабельной антенны при приеме электромагнитного поля в море. Вследствие компенсации индустриальной помехи нет необходимости удалять активную часть антенны на сотни метров от подводного объекта, что дает возможность уменьшить общую длину кабельной антенны на 200 метров, что существенно улучшает ее эксплуатационные характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОПЛЕРОВСКИЙ РАДИОВОЛНОВОЙ ИЗВЕЩАТЕЛЬ ДЛЯ ОХРАННОЙ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2008 |
|
RU2380724C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ | 2001 |
|
RU2190238C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2011 |
|
RU2447509C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2011 |
|
RU2462759C1 |
| Устройство для приема электромагнитного поля в море | 2018 |
|
RU2691165C1 |
| ЭЛЕКТРОННЫЙ ЗАМОК | 2010 |
|
RU2441969C1 |
| ДОПЛЕРОВСКИЙ РАДИОВОЛНОВОЙ ИЗВЕЩАТЕЛЬ ДЛЯ ОХРАННОЙ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2005 |
|
RU2287841C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ТЕЧИ В ТРУБАХ ГОРОДСКИХ ТЕПЛОВЫХ СЕТЕЙ | 2009 |
|
RU2414689C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА | 2005 |
|
RU2290059C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ МОРСКОГО БАЗИРОВАНИЯ | 2016 |
|
RU2614864C9 |
Устройство относится к радиотехнике и предназначено для приема радиоволн сверхнизких и крайне низких частот (СНЧ и КНЧ) в морской среде при радиосвязи с движущимся подводным объектом. Технический результат состоит в улучшении эксплуатационных характеристик за счет уменьшения длины кабельной антенны. Для этого устройство содержит первый электродный датчик электрического поля в виде первого и второго электродов, установленных на буксируемом за подводным объектом гибком кабеле и соединенных через провода кабеля с предварительным усилителем, и установленный на подводном объекте приемный блок, первый и второй узкополосные фильтры, управляемый усилитель, управляемый фазовращатель, блок вычитания, блок экстремального регулирования и второй электродный датчик в виде установленных на том же кабеле ближе к подводному объекту третьего и четвертого электродов, через первый узкополосный фильтр соединенных с управляемым усилителем, выход которого через управляемый фазовращатель соединен с первым входом блока вычитания, второй вход которого через второй узкополосный фильтр соединен с выходом предварительного усилителя, выход блока вычитания соединен с приемным блоком и первым входом блока экстремального регулирования, второй вход которого соединен с выходом первого узкополосного фильтра, первый выход блока экстремального регулирования соединен с управляющим входом управляемого усилителя, а второй выход - с управляющим входом управляемого фазовращателя, причем расстояние между третьим и четвертым электродами меньше, чем между первым и вторым электродами. 1 з.п. ф-лы, 1 ил.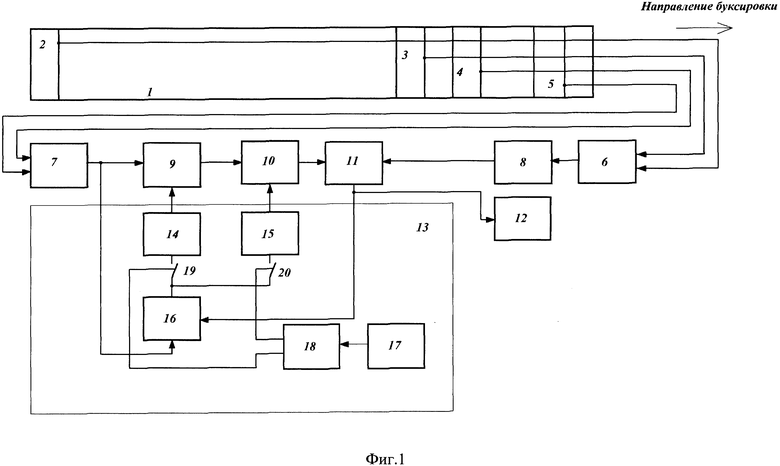
1. Приемное устройство для радиосвязи с подводным объектом, содержащее первый электродный датчик электрического поля в виде первого и второго электродов, установленных на буксируемом за подводным объектом гибком кабеле и соединенных через провода кабеля с предварительным усилителем, и установленный на подводном объекте приемный блок, отличающееся тем, что в него введены первый и второй узкополосные фильтры, управляемый усилитель, управляемый фазовращатель, блок вычитания, блок экстремального регулирования и второй электродный датчик в виде установленных на том же кабеле ближе к подводному объекту третьего и четвертого электродов, через первый узкополосный фильтр соединенных с управляемым усилителем, выход которого через управляемый фазовращатель соединен с первым входом блока вычитания, второй вход которого через второй узкополосный фильтр соединен с выходом предварительного усилителя, выход блока вычитания соединен с приемным блоком и первым входом блока экстремального регулирования, второй вход которого соединен с выходом первого узкополосного фильтра, первый выход блока экстремального регулирования соединен с управляющим входом управляемого усилителя, а второй выход - с управляющим входом управляемого фазовращателя, причем расстояние между третьим и четвертым электродами меньше, чем между первым и вторым электродами.
2. Устройство по п. 1, отличающееся тем, что блок экстремального регулирования содержит генератор тактовых импульсов, выход которого соединен с входом триггера, первый и второй интеграторы, первый и второй управляемые ключи, перемножитель, первый вход которого является первым входом блока экстремального регулирования, второй его вход является вторым входом блока экстремального регулирования, выход перемножителя через первый управляемый ключ соединен с входом первого интегратора, а через второй управляемый ключ соединен с входом второго интегратора, управляющие входы управляемых ключей соединены с выходами триггера, при этом выходы первого и второго интеграторов являются соответственно первым и вторым выходом блока экстремального регулирования.
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| Мяльная машина для стеблей лубяных растений | 1934 |
|
SU39319A1 |
| US 4972385 A, 20.11.1990 | |||
| US 7315488 B2, 01.01.2008 | |||
| CN 103544792 A, 29.01.2014. | |||

