Изобретение относится к области контроля и управления распределенными системами, в частности к способам контроля и управления системой связи. Изобретение может быть использовано для оценки соответствия установленным нормам, прогнозирования изменений состояния безопасности, поддержки принятия решений по управлению системой связи.
Основной задачей мониторинга безопасности объекта управления является своевременное обеспечение органов управления актуальной, достоверной и точной информацией, которая позволяет оценить состояние объекта управления и принять меры для обработки обнаруженных инцидентов безопасности и предотвращения перехода объекта управления в критическое состояние.
Для обеспечения безопасности динамических систем необходимым условием является строгое регламентирование по времени выполняемых функций безопасности (ФБ). В связи с этим, важной задачей контроля для критически важных динамических систем является обнаружение в реальном масштабе времени инцидентов безопасности (ИБ), которые заключаются в нарушении установленной последовательности и (или) сроков (регламента) выполнения ФБ.
Для контроля безопасности критически важных динамических систем важны свойства объективности и действенности. Под объективностью контроля понимается свойство результатов контроля, отражающее степень их соответствия реальному состоянию контролируемого объекта и критичности последствий инцидентов безопасности. Под действенностью контроля понимается свойство процесса и результатов контроля, определяющее качество обработки инцидентов безопасности.
Известен способ автоматического контроля и адаптивного управления системой и устройство для его осуществления (патент RU 2312389, МПК G06F 15/76, G05B 23/02, 20.03.2006). Способ позволяет сократить объем циркулирующей в системе управляющей информации и повысить помехоустойчивость системы управления. Технический результат достигается за счет двухэтапной процедуры принятия решения и дополнительного контура управления, связанного с воздействием на источник возмущений для предотвращения внутренних блокировок. На первом этапе используют локальную информацию о состоянии каждого узла, по которой обнаруживают неисправности путем сравнения измеренных значений контролируемых параметров с пороговыми. На втором этапе определяют тип неисправности путем измерения всей доступной измерению информации, вырабатывается управляющий сигнал для воздействия на систему.
Недостатками данного способа являются относительно низкая объективность оценки состояния контролируемого объекта, обусловленная отсутствием возможности адаптации системы контроля к изменяющимся задачам контроля. Способ не позволяет контролировать регламент выполнения задач, т.е. их своевременность в процессе функционирования контролируемого объекта и оценивать последствия нарушений регламентов для его безопасности. Высокая вероятность блокировки системы при передаче больших объемов измерительной информации. Относительно низкая достоверность результатов контроля обусловлена использованием только одного источника данных о состоянии единичного контролируемого объекта.
Известен способ распределенного контроля и адаптивного управления многоуровневой системой и устройство для его осуществления (патент RU 2450335, МПК G06F 15/00, G05B 23/02, 11.07.2011). Данный способ позволяет снизить вероятность блокировки системы путем сокращения объема циркулирующей в системе управляющей информации за счет перераспределения ее по уровням (контурам) управления. Способ основан на принципе адаптивной системы управления и многоэтапного контроля безопасности многоуровневой системы. Технический результат получают за счет того, что предварительно устанавливают пороговые значения контролируемых параметров каждого из узлов, образующих систему, измеряют на каждом узле системы его параметры, сравнивают значения измеренных параметров с пороговыми, по результатам сравнения оценивают состояние системы и при отклонении состояния системы от допустимого формируют управляющие сигналы по приведению параметров системы в норму. При этом K≥3-уровневую систему, включающую N(k) узлов на k-ом уровне, где k=1, 2, …К, а n(k)-й узел, где n(k)=1, … 2, N(k), характеризуют М(k, n) параметрами, состояние системы контролируют на К уровнях, для чего пороговые значения параметров znop (k, n, m), где m=1, 2, …, М(k, n) предварительно задают для узлов каждого из К уровней, после чего измеряют значения z(k, n, m) параметров узлов каждого уровня и сравнивают их с предварительно заданными соответствующими пороговыми значениями zпор(k, n, m), причем оценку состояния системы проводят поэтапно на К этапах, на первом этапе сравнивают пороговые и измеренные значения параметров узлов системы, принадлежащих первому уровню управления, и если их значения не выходят за пределы пороговых, то систему считают работоспособной, в противном случае вырабатывают управляющее воздействие для последовательной оценки состояния узлов системы, принадлежащих k=2, 3, …, К уровням управления, для чего сравнивают измеренные и пороговые значения параметров узлов системы k-го уровня, в случае, если измеренные параметры узлов системы k-го уровня управления не выходят за пределы пороговых, состояние узлов k-го уровня считают работоспособными, в противном случае, фиксируют неработоспособность узлов k-го уровня и выделяют его параметры, не удовлетворяющие пороговым, в соответствие с чем, вырабатывают управляющее воздействие на восстановление параметров узлов k-го уровня управления. Пороговые значения параметров znop (k, n, m) задают на основе априорных сведений о текущем состоянии системы на всех уровнях управления, формируя контур обратной связи системы. Реализацию способа осуществляют с применением методов статистической теории распознавания образов и статистической теории принятия решений, поэтому критерием качества является суммарная ошибка классификации (сумма ошибок первого и второго рода), которые возникают на первом и последующих этапах контроля.
Данный способ по сравнению с предыдущим аналогом за счет многоуровневой структуры и локальных контуров управления на каждом уровне позволяет уменьшить объем циркулирующей информации и сократить цикл управления, однако имеет следующие недостатки.
Способ имеет ограниченную область применения для динамических объектов контроля. Это обусловлено относительно низкой точностью и объективностью контроля по причине невозможности адаптации средств контроля к выполняемым задачам контроля и регламенту функционирования объекта. Относительно сложные вычислительные процедуры показателей состояния приводят к замедлению обработки больших объемов данных на верхних уровнях контроля, что не позволяет обеспечивать мониторинг и управление в реальном масштабе времени. Относительно низкая достоверность контроля обусловлена тем, что решение о состоянии единичного контролируемого объекта принимается по данным только одного средства контроля. Способ не позволяет своевременно принимать необходимые решения и воздействовать на объект управления, так как соответствующие сигналы формируются на удаленном центре управления, чем обусловлена относительно низкая действенность контроля.
Наиболее близким аналогом (прототипом) заявленного способа является способ комплексного мониторинга безопасности динамических объектов и систем (патент RU 2574083, МПК G06F 19/00, 06.03.2014). Способ позволяет обеспечить адресную, дистанционную адаптацию программно-аппаратной конфигурации средств осуществления мониторинга с целью получения в требуемый момент времени измерительной информации, необходимой для решения новой совокупности задач оценивания безопасности динамических систем в процессе их функционирования.
Способ заключается в следующей последовательности действий. Предварительно формируют в аппаратно-программном комплексе центра обработки и управления (ЦОУ) блокматрицу-задание каждому средству мониторинга на контроль состояния динамической системы или объекта. В состав блокматрицы-задания включают: подматрицу-задание на измерение значений требуемой совокупности параметров состояния контролируемого объекта; подматрицу-задание на изменение содержимого базы знаний и порядка использования новых процедур интеллектуальной обработки измеренных значений параметров объекта; подматрицу-задание на изменение пространственно-временных характеристик состояния средства в процессе осуществления мониторинга. В базы данных и базы знаний средств осуществления мониторинга по каналам связи вводят блокматрицу-задание, содержащую следующие данные: пронумерованные процедуры интеллектуальной обработки измеренных значений параметров состояния, правила интерпретации и отображения заданий, правила разделения матрицы-задания на подматрицы-задания и формирования сообщений о результатах мониторинга, правила использования процедур интеллектуальной обработки измеренных значений, правила преобразования измеренных значений в заданную форму, правила изменения состава процедур интеллектуальной обработки измеренных значений, идентификаторы вида действий и значения их уровней приоритета при изменении содержимого базы правил. Вводят в систему измерений средств мониторинга модуль диспетчера, с помощью которого управляют частотой опроса параметров, выбором, функционированием выбранной совокупности измерительных модулей, а также функционированием модуля преобразования измеренных значений параметров безопасности динамической системы. От ЦОУ по линиям связи передают, а в средстве мониторинга получают и преобразовывают в аппаратуре приема-передачи данных сообщение, содержащее блокматрицу-задание. Преобразованное сообщение передают в модуль ввода-вывода, где выделяют из сообщения подматрицы-задания и копируют их, после этого копию подматрицы-задания на измерение передают в диспетчер системы измерения, а копию блокматрицы-задания передают в базы данных и базы знаний. В диспетчере формируют состав и затем управляют функционированием сформированной совокупности измерительных модулей, которые осуществляют измерения в соответствии с заданной частотой, затем результаты измерений значений параметров состояния передают в модуль преобразования, где получают значения и формируют файлы преобразованных значений в заданной форме, затем из файлов формируют матрицу преобразованных значений, которую передают в базу данных. Затем в соответствии с правилами управления из базы данных файлы передают в модуль интеллектуальной обработки и оценивания, где по совокупности процедур, в соответствии с заданием вычисляют значения оценок параметров и/или интегральных характеристик динамической системы, затем их сравнивают с допустимыми. Вычисляют значения и формируют матрицу безразмерных показателей соответствия (несоответствия) и фиктивных показателей несоответствия оцененных и заданных значений контролируемых параметров состояния динамической системы. Передают матрицу показателей в модуль ввода-вывода, в котором ее включают в содержание сообщения о фактическом состоянии динамической системы, которое через аппаратуру приема-передачи данных передают в виде комплексного сигнала в ЦОУ, где преобразовывают и представляют в требуемой форме.
Недостатками ближайшего аналога являются:
1. Относительно низкая достоверность и объективность контроля, что обусловлено принятием решения о состоянии контролируемых объектов на основании данных только одного средства мониторинга, невозможностью контроля регламента функционирования объекта (продолжительности и последовательности задач, выполняемых объектами), не позволяет оценивать критичность последствий инцидентов безопасности;
2. Относительно низкая оперативность и действенность контроля, что обусловлено линейной структурой взаимосвязи средств мониторинга и ЦОУ и передачей сообщений с результатами контроля от каждого объекта контроля в ЦОУ, принятием решения на удаленном от контролируемого объекта ЦОУ, недостаточным информированием операторов контролируемых объектов о возникших неисправностях и рациональных вариантах действий по их устранению.
Техническим результатом при использовании заявленного способа является:
1. Повышение достоверности и объективности контроля состояния системы связи с помощью фиксации регламента выполнения функций безопасности и оценки критичности инцидентов безопасности для функционирования всей системы связи, совместной обработки данных двух и более средств мониторинга, управления показателями достоверности средств мониторинга, контроля состояния среды (условий) функционирования системы связи, выбора оптимальных режимов работы и расположения мобильных средств мониторинга относительно контролируемых объектов с учетом состояния среды;
2. Повышение оперативности и действенности без потери достоверности контроля за счет использования многоуровневой древовидной структуры взаимосвязи средств мониторинга, представления данных контроля в матричной форме и поэтапной обработки данных средствами мониторинга соответствующих уровней на основе двоичной логики, прогнозирования последствий ИБ, а также выполнения функции поддержки принятия решений оператора контролируемого объекта по обработке инцидентов безопасности.
В заявленном способе технический результат достигается тем, что в известном способе мониторинга безопасности системы связи, включающей N≥2 контролируемых зон связи (КЗС) (1), средства мониторинга (СМ) (2) в каждой КЗС и центр мониторинга и управления связью (ЦМУС) (3) до начала измерений формируют в ЦМУС (3) для каждого СМ (2) блокматрицы-задания (БМЗ), содержащие совокупность измерительных модулей (ИМ) и контролируемых параметров (КП), а также границы интервалов допустимых значений КП, передают по каналам связи и вводят БМЗ в СМ (2), устанавливают заданные параметры СМ (2), измеряют и оценивают численные значения КП, формируют матрицу оцененных значений КП (МОЗКП) (11), вычисляют значения частных показателей безопасности (ЧПБ), формируют матрицу частных показателей безопасности (МЧПБ) (12), вычисляют значения обобщенных показателей безопасности (ОПБ), формируют матрицу обобщенных показателей безопасности (МОПБ) (14), отображают на индикационном поле СМ (2) значения ЧПБ и ОПБ КЗС (1), формируют в СМ (2) и передают в ЦМУС (3) сообщение с МОПБ (14) с помощью аппаратуры приема-передачи данных, принимают в ЦМУС (3), преобразуют и представляют в предварительно заданной форме полученные данные, отличающийся тем, что в ЦМУС (3) формируют СС в виде многоуровневой вложенной структуры КЗС с количеством уровней вложенности Ψ≥3 и N≥1 КЗСn первого уровня (1), где n=1, 2…N, М≥1 КЗСm второго уровня (4), где m=1, 2…М, K≥1 КЗСk третьего уровня (5), где k=1, 2…K, L≥1 KЗC1 четвертого уровня (6), где l=1, 2…L. Изменяют состав средств мониторинга в КЗС с помощью Z≥1 арбитражных средств мониторинга (АСМ) (7). Присваивают СМ (2) и КЗС адрес (nmkl), а АСМ (7) присваивают адрес (z). Формируют до начала измерений в СМ (2) матрицы связности корреспондентов (МСК) (8) между i-м и j-м корреспондентами, где i=1, 2…I, I≥2, j=1, 2…J, J≥2, i≠j, матрицы регламентов функций безопасности (МРФБ) (9) и матрицы показателей достоверности средств мониторинга (МПДСМ) (10). Задают в ЦМУС (3) допустимое значение совокупной ошибки оценки безопасности КЗС (Рош доп) и базу типовых инцидентов безопасности (ИБ). После измерений и оценки значений КП в СМ (2) формируют для каждой ij-й связи из МСК (8) матрицу оцененных значений КП (МОЗКП) (11), вычисляют значения частных показателей безопасности (ЧПБ) Cij, оценивают временные интервалы (Tr ij) и последовательность выполнения  функций безопасности (ФБ), вычисляют показатели своевременности функций безопасности (ПСФБ) (Vr ij) и обобщенные Wij показатели безопасности (ОПБ), а также значения Pij показателей достоверности результатов контроля (ПДРК). Формируют для каждой ij-й связи матрицы частных показателей безопасности (МЧПБij) (12), матрицы своевременности функций безопасности (МСФБij) (13), формируют для каждой КЗС матрицу обобщенных показателей безопасности (МОПБ) (14), матрицу показателей достоверности результатов контроля (МПДРК) (15) и матрицу состояния среды (МСС) (16). При отсутствии ИБ передают на СМ (2) вышестоящего уровня в сообщении (17) адрес СМ (2), МСК (8) и МСС (16). При обнаружении ИБ в ij-й связи или по сигналу от вышестоящего СМ (2) включают сигнализацию на индикационном поле СМ (2), дополнительно в сообщении (19) на СМ (2) вышестоящего уровня передают МОПБ (14), МПДРК (15), МЧПБij (12), МСФБij (13). Принимают сообщения (17), (19) на СМ (2) вышестоящего уровня, где формируют сводные МСК (8), МСК (8), МСС (16), МОПБ (14), МПДРК (15). Передают сообщения от СМ (2) первого уровня и АСМ (7) в ЦМУС (3). При отсутствии ИБ в сообщении (18) от АСМ (7) передают его адрес (z), адрес КЗС (nmkl), МСК (8) и МСС (16). При обнаружении ИБ в ij-й связи или по сигналу от ЦМУС (3) в сообщениях (20) от АСМ (7) дополнительно передают МОПБ (14), МЧПБij (12) и МСФБij (13). Принимают в ЦМУС (3) сообщениям от СМ (2) первого уровня и АСМ (7), формируют сводные по СС МСК (8), МОПБ (14), МПДРК (15) и МСС (16). Сравнивают в ЦМУС (3) сводные МСК (8) и МСС (16), по показателям которых, определяют КЗС с наиболее сложными условиями для контроля. Формируют в ЦМУС (3) и передают управляющие сигналы по позиционированию АСМ (7) в пределах КЗС и режимам работы для обеспечения оптимальных условий контроля. Классифицируют в ЦМУС (3) обнаруженные ИБij путем сравнения соответствующей МЧПБij (12) с базой типовых ИБ. Категорируют в ЦМУС (3) ИБij путем оценки критичности последствий нарушений регламента выполнения функций безопасности (ФБ) ij-й связи для безопасности СС и отображают результаты классификации и категорирования на индикационном поле ЦМУС (3). Формируют в ЦМУС (3), АСМ (7), СМ (2) вышестоящего уровня и передают в СМ (2) нижестоящего уровня управляющие сигналы по обработке ИБij. Принимают управляющие сигналы и отображают их на индикационном поле СМ (2) для обработки ИБij в соответствующей КЗС. Вычисляют в ЦМУС (3) значения статистических показателей достоверности (Рош) сообщений от СМ (2), сравнивают их с допустимым значением совокупной ошибки (Рош доп) оценки безопасности КЗС. Формируют и отображают сообщение о неисправности СМ (2) при превышении заданного допустимого значения совокупной ошибки (Рош доп), формируют новую МПДСМ (10), которую дополнительно в составе БМЗ передают по каналам связи и вводят в соответствующее СМ (2).
функций безопасности (ФБ), вычисляют показатели своевременности функций безопасности (ПСФБ) (Vr ij) и обобщенные Wij показатели безопасности (ОПБ), а также значения Pij показателей достоверности результатов контроля (ПДРК). Формируют для каждой ij-й связи матрицы частных показателей безопасности (МЧПБij) (12), матрицы своевременности функций безопасности (МСФБij) (13), формируют для каждой КЗС матрицу обобщенных показателей безопасности (МОПБ) (14), матрицу показателей достоверности результатов контроля (МПДРК) (15) и матрицу состояния среды (МСС) (16). При отсутствии ИБ передают на СМ (2) вышестоящего уровня в сообщении (17) адрес СМ (2), МСК (8) и МСС (16). При обнаружении ИБ в ij-й связи или по сигналу от вышестоящего СМ (2) включают сигнализацию на индикационном поле СМ (2), дополнительно в сообщении (19) на СМ (2) вышестоящего уровня передают МОПБ (14), МПДРК (15), МЧПБij (12), МСФБij (13). Принимают сообщения (17), (19) на СМ (2) вышестоящего уровня, где формируют сводные МСК (8), МСК (8), МСС (16), МОПБ (14), МПДРК (15). Передают сообщения от СМ (2) первого уровня и АСМ (7) в ЦМУС (3). При отсутствии ИБ в сообщении (18) от АСМ (7) передают его адрес (z), адрес КЗС (nmkl), МСК (8) и МСС (16). При обнаружении ИБ в ij-й связи или по сигналу от ЦМУС (3) в сообщениях (20) от АСМ (7) дополнительно передают МОПБ (14), МЧПБij (12) и МСФБij (13). Принимают в ЦМУС (3) сообщениям от СМ (2) первого уровня и АСМ (7), формируют сводные по СС МСК (8), МОПБ (14), МПДРК (15) и МСС (16). Сравнивают в ЦМУС (3) сводные МСК (8) и МСС (16), по показателям которых, определяют КЗС с наиболее сложными условиями для контроля. Формируют в ЦМУС (3) и передают управляющие сигналы по позиционированию АСМ (7) в пределах КЗС и режимам работы для обеспечения оптимальных условий контроля. Классифицируют в ЦМУС (3) обнаруженные ИБij путем сравнения соответствующей МЧПБij (12) с базой типовых ИБ. Категорируют в ЦМУС (3) ИБij путем оценки критичности последствий нарушений регламента выполнения функций безопасности (ФБ) ij-й связи для безопасности СС и отображают результаты классификации и категорирования на индикационном поле ЦМУС (3). Формируют в ЦМУС (3), АСМ (7), СМ (2) вышестоящего уровня и передают в СМ (2) нижестоящего уровня управляющие сигналы по обработке ИБij. Принимают управляющие сигналы и отображают их на индикационном поле СМ (2) для обработки ИБij в соответствующей КЗС. Вычисляют в ЦМУС (3) значения статистических показателей достоверности (Рош) сообщений от СМ (2), сравнивают их с допустимым значением совокупной ошибки (Рош доп) оценки безопасности КЗС. Формируют и отображают сообщение о неисправности СМ (2) при превышении заданного допустимого значения совокупной ошибки (Рош доп), формируют новую МПДСМ (10), которую дополнительно в составе БМЗ передают по каналам связи и вводят в соответствующее СМ (2).
Благодаря новой совокупности существенных признаков достигается указанный технический результат.
Предварительное задание базы данных ИБ, МРФБ (9), оценка временных параметров (Tr ij) и последовательности выполнения ФБ, классификация и категорирование ИБ обеспечивают контроль регламента выполнения ФБ и оценку критичности ИБ для функционирования всей СС, тем самым позволяют повысить объективность оценки состояния СС.
Предварительное задание ПДСМ, прием и обработка сообщений на СМ (2) вышестоящего уровня, вычисление ПДРК, изменение ПДСМ по результатам анализа в ЦМУС (3) статистических данных об ошибках оценки состояния КЗС, обеспечивают совместную обработку данных о состоянии КЗС от нескольких СМ (2) и АСМ (7) и управление показателями достоверности CM (2). Анализ в ЦМУС (3) данных МСК (8) и МСС (16), передача по результатам их анализа управляющих сигналов на АСМ (7) обеспечивает оптимальное расположение и режимы работы АСМ (7) в пределах КЗС, что также позволяет повысить достоверность мониторинга.
Представление результатов оценки состояния КЗС в виде двоичных матриц МЧПБij (12), МСФБij (13) и МОПБ (14) обеспечивает получение обобщенных показателей путем простого преобразования двоичных величин на основе двоичной логики. При этом дополнительные данные на вышестоящих уровнях мониторинга включаются в соответствующую сводную матрицу путем добавления строки без значительных вычислительных затрат и времени, благодаря чему выполняется поэтапная обработка больших объемов данных контроля без потери в достоверности, что позволяет повысить оперативность мониторинга.
Выполнение в СМ (2) функций измерения КП, обнаружения ИБ и отображения на индикационном поле результатов оценки состояния КЗС, а также управляющих сигналов полученных от СМ (2) вышестоящего уровня и АСМ (7), дополнительное информирование оператора о рациональных вариантах действий по обработке ИБ соответствующего типа обеспечивает комбинирование локальных (внутренних) и внешнего контуров управления безопасностью КЗС и выполнение функции поддержки принятия решений оператора, что позволяет повысить действенность контроля и управлять безопасностью СС в масштабе времени близком к реальному.
Указанные в формуле изобретения буквенные обозначения имеют следующий смысл:
Ψ - количество уровней вложенности контролируемых зон связи системы связи;
N - количество контролируемых зон связи первого уровня в системе связи;
М - количество контролируемых зон связи второго уровня в системе связи;
K - количество контролируемых зон связи третьего уровня в системе связи;
L - количество контролируемых зон связи четвертого уровня в системе связи;
Z - количество арбитражных средств мониторинга;
R - количество функций безопасности;
- последовательность выполнения (вектор) функций безопасности.
Сущность изобретения поясняется чертежами, на которых отражены:
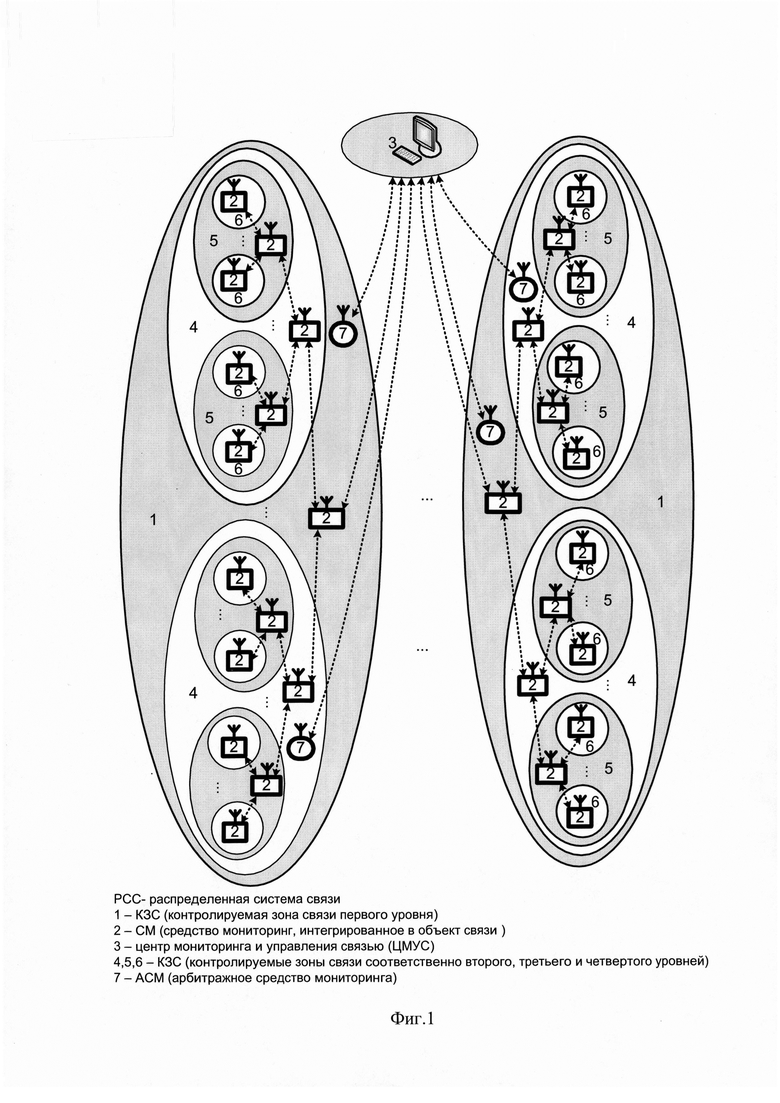
на фиг. 1 - функциональная схема способа мониторинга безопасности СС;
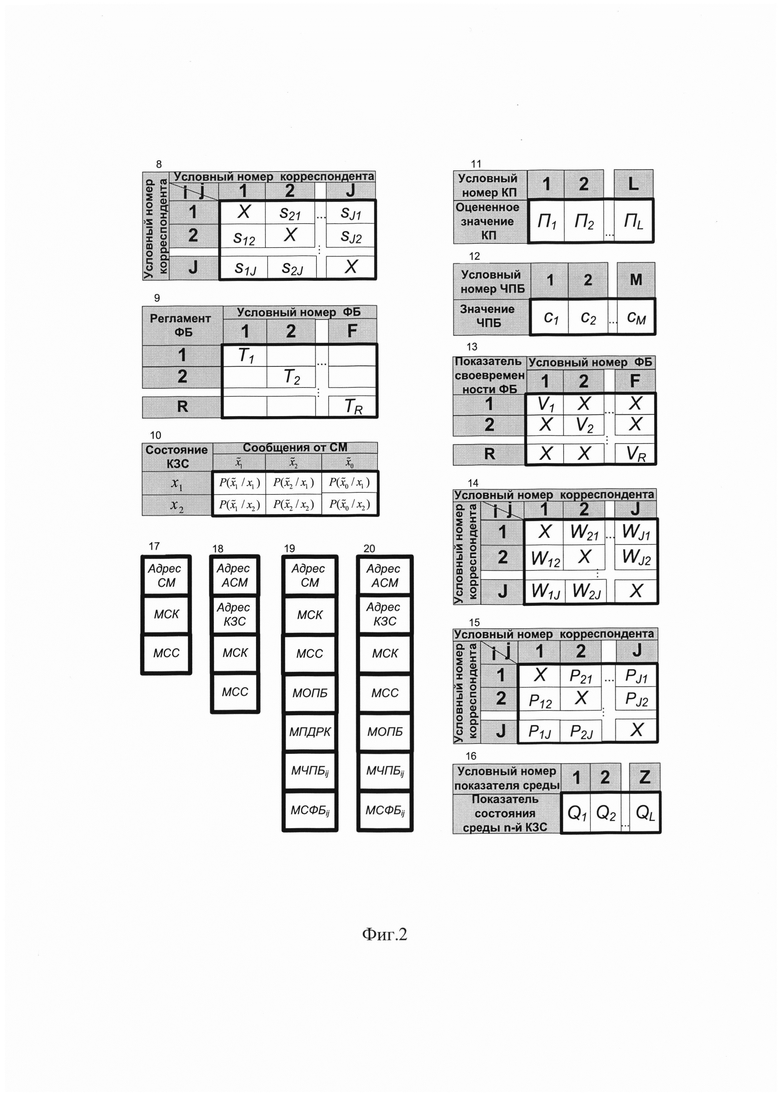
на фиг. 2 - форматы данных формируемых и передаваемых при осуществлении заявленного способа.
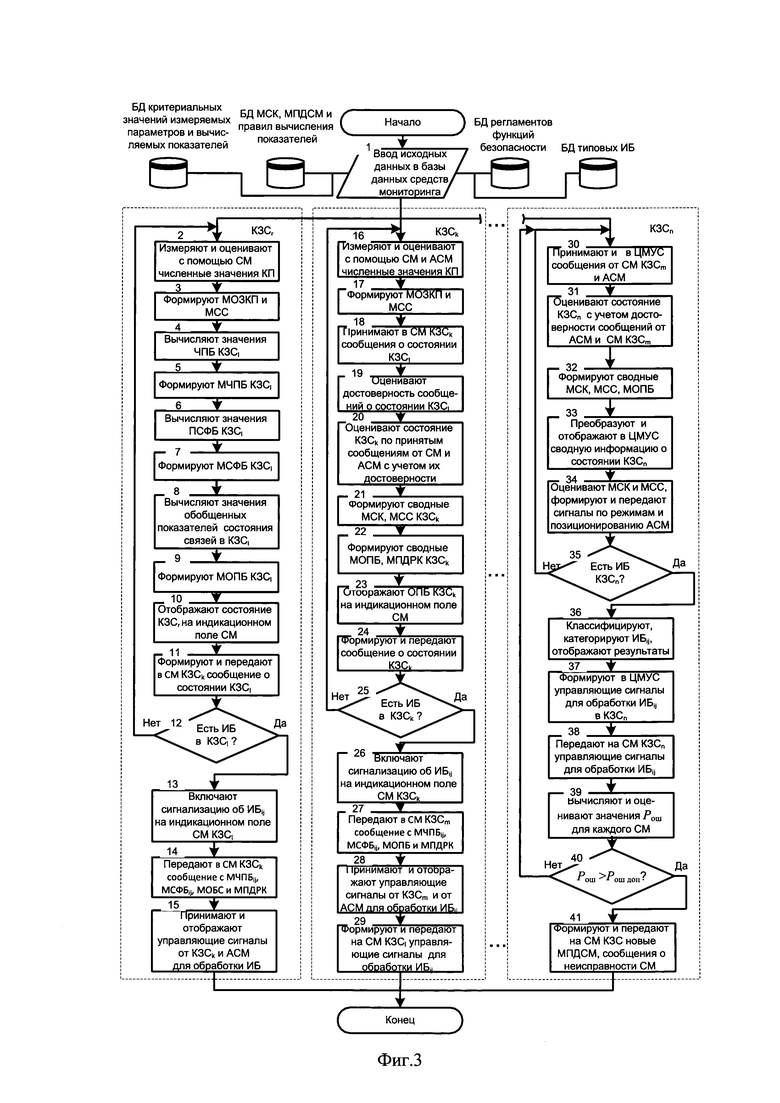
на фиг. 3 - блок-схема алгоритма реализации способа.
На фиг. 1 и 2 использованы следующие обозначения:
1 - контролируемая зона связи первого уровня системы связи (КЗС);
2 - средство мониторинга, интегрированное в элементы системы связи (СМ);
3 - центр мониторинга и управления связью (ЦМУС);
4 - контролируемая зона связи второго уровня;
5 - контролируемая зона связи третьего уровня;
6 - контролируемая зона связи четвертого уровня;
7 - арбитражное средство мониторинга (АСМ);
8 - матрица связности корреспондентов (МСК);
9 - матрица регламентов функций безопасности (МРФБ);
10 - матрица показателей достоверности средств мониторинга (МПДСМ);
11 - матрица оцененных значений контролируемых параметров (МОЗКП);
12 - матрица частных показателей безопасности (МЧПБ);
13 - матрица своевременности функций безопасности (МСФБ);
14 - матрица обобщенных показателей безопасности (МОПБ);
15 - матрица показателей достоверности результатов контроля (МПДРК);
16 - матрица состояния среды (МСС);
17 - сообщение от СМ при отсутствии ИБ;
18 - сообщение от АСМ при отсутствии ИБ;
19 - сообщение от СМ при фиксации ИБ;
20 - сообщение от АСМ при фиксации ИБ.
Заявленный способ реализуют следующим образом. Система связи (СС) в общем случае включает в себя телекоммуникационную подсистему (узлы или отдельные аппаратные связи, соединенные линиями или каналами связи, операторов средств связи), а также подсистему управления связью (органы и средства автоматизации управления связью, сеть служебной связи). В качестве примера (см. фиг. 1) рассматривается система связи с четырьмя уровнями вложенности КЗС и одним ЦМУС. Для обеспечения мониторинга и управления связью интегрируют СМ (2) в элементы СС, кроме того для сбора данных дополнительно используют АСМ (7).
Предварительно формируют базы данных допустимых значений измеряемых параметров и вычисляемых показателей безопасности (частных и обобщенных), показателей достоверности средств мониторинга, базу данных матриц связности корреспондентов МСК (8) и правил вычисления показателей, базу данных типовых инцидентов безопасности, а также базу данных регламентов функций безопасности (БД РФБ) (см. фиг. 3). МСК (8) формируют в виде симметричной матрицы, в которой элементами являются двоичные величины, принимающие значение «1» при наличии связи между i-м и j-м корреспондентами и значение «0» при ее отсутствии. Вводят базы данных в СМ (2), АСМ (7) и ЦМУС (см. фиг. 3 поз. 1).
В процессе мониторинга одновременно выполняют измерения и оценку контролируемых параметров линий (каналов) связи с помощью СМ (2) во всех КЗС (поз. 2-9), а также выборочно в КЗС с помощью АСМ (7) (поз. 16, 17). При этом вычисляют значения частных (ЧПБ) (поз. 4), значения показателей своевременности функций безопасности (ПСФБ) (поз. 6, 7) и обобщенных (ОПБ) показателей безопасности в линиях (каналах) связи (поз. 8, 9). В результате вычислений формируют МЧПБij (12), МСФБij (13) и МОПБ (14).
МОПБ (14) представляет собой матрицу, элементами которой являются двоичные величины, принимающие значение «1», когда ИБ отсутствуют и принимающую значение «0», когда фиксируется ИБ в соответствующей линии (канале) связи (см. фиг. 2). На индикационном поле СМ (2) всех уровней отображают МОПБ КЗС (поз. 10).
При отсутствии ИБ от каждого СМ (2) на вышестоящий уровень мониторинга с заданной периодичностью передают минимальный объем информации в виде сообщения (17), которое включает в себя адрес СМ (2), соответствующую МСК (8) и МСС (16) (поз. 11).
В СМ (2) вышестоящего уровня принимают сообщения (поз. 18) оценивают достоверность принятых сообщений (поз. 19), для чего вычисляют ПДРК по предварительно заданным МПДСМ (10). Далее оценивают состояние КЗС с учетом достоверности принятых сообщений (поз. 20). Формируют сводные МСК (8), МОПБ (14), МПДРК (15), МСС (16), (поз. 21, 22). Отображают ОПБ КЗС на индикационном поле СМ (поз. 23). Формируют и передают сообщение (17) на СМ (2) вышестоящего уровня (поз. 24).
При отсутствии ИБ в сообщение (18) от АСМ (7) включают адрес АСМ (7), адрес КЗС, МСК (8) и МСС (16) для соответствующей КЗС.
Таким образом, объем периодически передаваемой информации при увеличении количества уровней мониторинга изменяется незначительно, так как увеличивается для каждого уровня только на одну строку и столбец размер МСК (8) и МСС (16).
При обнаружении ИБ на СМ (2) включают сигнализацию об ИБ (поз. 13, 26), передают необходимую информацию для локализации, категорирования и классификации ИБ (поз. 14, 27) в СМ (2) вышестоящего уровня. Сообщение от СМ (2) при фиксации ИБ (16) в ij-той связи включает в себя дополнительно МЧПБij (12), МСФБij (13) МОПБ (14), МПДРК (15).
МЧПБij (12) представляет собой строку, в которой элементами являются двоичные величины ЧПБ, например, таких как, конфиденциальность, целостность, доступность, подлинность, авторизованность, неотказуемость и др. Вычисление ЧПБ по оцененным значениям контролируемых параметров (ОЗКП) может выполняться различными методами [5].
МСФБij (13) представляет собой строку, в которой элементами являются двоичные величины, полученные по результатам сравнения ПСФБ ij-той связи с предварительно заданными в БД РФБ интервалами времени выполнения функций безопасности. Элемент матрицы равен «1», когда продолжительность выполнения (Tr ij) и порядковый номер (r) ФБ в последовательности относительно других ФБ соответствуют предварительно заданным значениям в МРФБ (9).
МОПБ (14) представляет собой симметричную матрицу, в которой ij-тый элемент равен «1», когда в ij-той связи отсутствуют ИБ и равный «0», когда в данном канале (линии) связи фиксируется ИБ. Вычисление элементов МОПБ по значениям МЧПБij и МСФБij выполняться с помощью мультипликативной свертки двоичных показателей каждой из матриц соответственно Cij и Vij, с последующим вычислением обобщенного показателя Wij=Cij⋅Vij. Вычисления могут выполняться с помощью методов математической информатики и среды радикалов [5], [6].
МПДРК (15) представляет собой симметричную матрицу, в которой элементами являются двоичные величины, значения которых определяются по результатам сравнения с пороговым значением (Рош доп=0,4) значения совокупной ошибки (Рош) оценки СМ (2) безопасности ij-той связи, вычисленные на основе МПДСМ (10) для соответствующих СМ (2). Т.е. ij-тый элемент МПДРК (15) равен «1», если Рош≤Рош доп. Методика вычисления ПДРК основана на формуле полной вероятности Бейеса [1] и представлена в приложении 1.
Далее принимают и отображают (поз. 28) от СМ (2) вышестоящего уровня и АСМ (7) управляющие сигналы для обработки ИБij.
Сообщение (20), принимаемое от АСМ (7) при фиксации ИБij включает в себя адрес АСМ (7), адрес КЗС, МСК (8) соответствующей КЗС, МОПБ (14), МЧПБij, (12), МСФБij (13). Причем, в АСМ (7) формируют и передают сообщение напрямую или через ближайшее СМ (2) в ЦМУС (3) о состоянии КЗС и дополнительно передают сообщение в СМ (2) КЗС, в которой зафиксирован ИБij.
По принятым сообщениям в ЦМУС (3) (поз. 30) оценивают состояние КЗС с учетом достоверности принятых сообщений (поз. 31), формируют сводные для всей СС МСК (8), МСФБ (13), МОПБ (14), МПДРК (15) (поз. 32). Преобразуют в ЦМУС (3) (поз. 33) для удобного восприятия и отображают сводную информацию о состоянии КЗС. Сопоставляют МСК (8) и МСС (16) в результате чего, определяют КЗС с наиболее сложными условиями для мониторинга. Далее формируют и передают сигналы по оптимальным режимам работы и позиционированию АСМ (7) относительно объектов связи для обеспечения оптимальных условий для контроля безопасности КЗС (поз. 33). При обнаружении ИБij выполняют классификацию и категорирование ИБij путем сравнения МЧПБij с предварительно заданными эталонами ИБ и сравнения МСФБij (13) с МРФБ (9) (поз. 36). Сравнение соответствующих матриц для классификации и категорирования ИБij может выполняться на основе методов математической информатики с применением среды радикалов [5], [6].
Далее формируют и передают управляющие сигналы для обработки ИБij в соответствующей КЗС (поз. 37, 38). В СМ (2) вышестоящего уровня формируется (ретранслируется) сообщение с управляющими сигналами для обработки ИБij (поз. 29) нижестоящим СМ (2).
В ЦМУС вычисляют и оценивают значения статистических показателей достоверности сообщений (Рош) от СМ (2) путем сопоставления принятых сообщений от СМ (2) и АСМ (7) (поз. 39). В случае превышения вычисленным значением (Рош) допустимого значения (Рош доп) формируют и передают на соответствующие СМ (2) новые МПДСМ (10) и сообщения о неисправности СМ (2) (поз. 41).
Таким образом, возможность достижения технического результата обусловлена представленной последовательностью материальных действий над материальными объектами, которые могут быть реализованы с помощью известных технических средств. Интегрированные средства мониторинга СМ (2) могут быть выполнены в программном или аппаратно-программном виде на базе известных типовых микроконтроллеров [2]. АСМ (7) реализуются в виде аппаратно-программных средств на транспортных средствах или в портативном исполнении [3]. ЦМУС (3) реализуется на основе известных технологий построения ситуационных центров [4]. Предварительное формирование исходных моделей контролируемых объектов и процессов в виде двоичных матриц может быть реализовано на основе математической информатики [5] сравнение двоичных матриц, обнаружение ИБ, прогнозирование и оценка критичности последствий ИБ для безопасности всей СС реализуются на основе языка схем радикалов [6], [7], выбор вариантов обработки ИБ реализуются на основе метода ухода от конфликтов сложных систем [8].
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ ИНФОРМАЦИИ.
1. Вентцель Е.С. Введение в исследование операций, М.: Изд. «Советское радио», 1964. - 388 с. С. 357-370.
2. Программирование микроконтроллерных плат Arduino/Freeduino, СПб.: Изд. БХВ-Петербург, 2012. - 320 с.
3. Рембовский A.M., Ашихмин А.В., Козьмин В.А. Радиомониторинг - задачи, методы, средства / Под ред. A.M. Рембовского. 2-е изд. перераб. и доп. - М.: Горячая линия - Телеком, 2010. - 624 с. ил.
4. Ситуационные центры. Опыт, состояние, тенденции развития / Н.И. Ильин, Н.Н. Демидов, Е.В. Новикова. - М.: МедиаПресс, 2011 - 336 с.
5. Чечкин А.В. Математическая информатика/ А.В. Чечкин. - М.: Наука, 1991. - 412 с.
6. Лепешкин, О.М., Пирогов, М.В. Интеллектуализация сложных систем. Язык схем радикалов. Методы и алгоритмы. Монография/ О.М. Лепешкин, М.В. Пирогов и др.; под. ред. А.В. Чечкина и А.В. Рожнова. - М. «Радиотехника», 2008. - 96 с.
7. Интеллектуализация сложных систем язык схем радикалов в проблемных вопросах предпроектных исследований, оснащения, сопровождения систем и в экспериментальных задачах внедрения критических наукоемких технологий: коллективная монография. Будко Н.П., Будко П.А., Булгаков О.Ю., Васильев В.В., Давидчук В.В., Евграфов А.Е., Жук А.П., Карпов В.В., Князев В.В., Кублик Е.И., Лепешкин О.М., Лощенков И.В., Ляченков С.В., Мезенцев А.В., Павловский И.С., Пирогов М.В., Попов А.А., Потюпкин А.Ю., Прошин Д.С., Радько С.А. и др. Информационно-измерительные и управляющие системы. 2009. Т. 7. №3. С. 1-92.
8. Пирогов, М.В. Метод ухода от конфликтов сложных систем/ М.В. Пирогов// Информационно-измерительные управляющие системы. - 2009. - №3. - Т. 7. - С. 34-48.
Приложение 1
Методика оценки показателей достоверности результатов мониторинга
Элементы системы связи X могут находиться в различных состояниях: x1, x2, …, xk.
Каждый источник, в данном случае интегрированное СМ (2) или автономное АСМ (7) может дать данные (сообщение) о состоянии КЗС:
 - сообщение о том, что ИБ отсутствуют и КЗС в состоянии х1;
- сообщение о том, что ИБ отсутствуют и КЗС в состоянии х1;
 - сообщение о том, что зафиксирован ИБ и КЗС находится в состоянии x2.
- сообщение о том, что зафиксирован ИБ и КЗС находится в состоянии x2.
Возможен случай, когда источник (средство мониторинга неисправно или отсутствует доступный канал для передачи данных) не принесет никаких сообщений  .
.
Задача обработки данных контроля в общем случае в следующем: группа источников приносит о состоянии системы X совокупность сообщений (в общем случае разноречивых), необходимо определить наиболее вероятное состояние системы и распределение вероятностей остальных состояний.
При прочих равных условиях большего доверия заслуживают сообщения, передаваемые:
- большим количеством источников;
- источниками с наиболее совершенной аппаратурой.
Кроме того при обработке данных контроля должно приниматься во внимание правдоподобие сообщений, т.е. предварительно оцененные тем или другим способом вероятности состояний x1, x2, …, xk:

Это предварительные вероятности в отличие от окончательных вероятностей состояний системы  которые будут получены в результате контроля. Очевидно, что окончательные вероятности состояний зависят от того, какая совокупность
которые будут получены в результате контроля. Очевидно, что окончательные вероятности состояний зависят от того, какая совокупность  сообщений получена из различных источников.
сообщений получена из различных источников.

Эти вероятности представляют собой условные вероятности состояний x1, x2, … xk, вычисленные при условии, что в результате контроля получена совокупность сообщений . Уточнить вероятность гипотезы с учетом поступивших новых сведений позволяет формула Бейеса. Вероятность любого безопасности xi после получения совокупности сообщений :
 где
где
 - вероятность совокупности сообщений
- вероятность совокупности сообщений  , если система была в состоянии x1;
, если система была в состоянии x1;
 - вероятность совокупности сообщений
- вероятность совокупности сообщений  , если система была в состоянии x2 и т.д.
, если система была в состоянии x2 и т.д.
Вероятности 
 … могут быть вычислены, если известны характеристики средств контроля.
… могут быть вычислены, если известны характеристики средств контроля.
Исходные вероятности  могут быть получены разными путями:
могут быть получены разными путями:
- на основании опыта практической эксплуатации подобных систем;
- на основании статистических данных предшествующих циклов контроля;
- на основании расчетов по исследованию операций и прогнозирования.
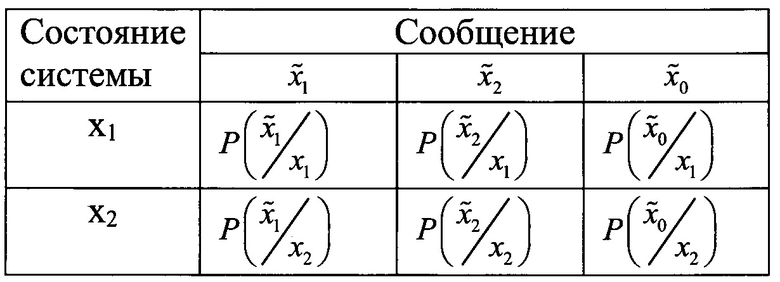
Если состояний всего два, то достаточно определить только одну из вероятностей, так как другая определяется вычитанием ее из единицы, в связи с тем, что соответствующие два события являются полной группой несовместных событий. Для решения задачи, необходимо ввести характеристики достоверности источника данных контроля:
 - вероятность того, что источник принесет сообщение
- вероятность того, что источник принесет сообщение  если система находится в состоянии x1;
если система находится в состоянии x1;
 вероятность того, что источник принесет сообщение
вероятность того, что источник принесет сообщение  если система находится в состоянии x1;
если система находится в состоянии x1;
 вероятность того, что источник не принесет сообщения, если система находится в состоянии x1.
вероятность того, что источник не принесет сообщения, если система находится в состоянии x1.
Тогда 
Аналогично при условии нахождения системы в состоянии х2:
причем 
Указанные вероятности: правильного сообщения, ошибки и отсутствия сообщения в общем случае зависят от того, в каком состоянии находится система.
Если в результате контроля получено сообщение тогда вероятность того, что это сообщение правильное, т.е. вероятность состояния x1 после получения данных контроля, можно определить по формуле Бейеса:
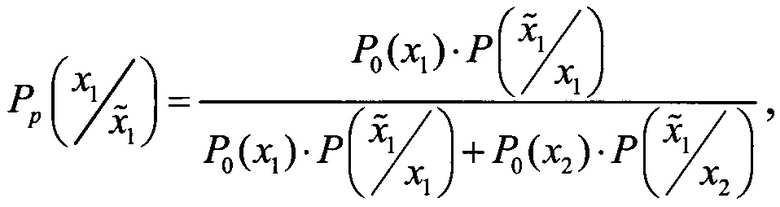
Если в результате контроля получено сообщение  тогда вероятности состояний определяются следующим образом:
тогда вероятности состояний определяются следующим образом:
Если сообщение по результатам контроля не получено, то:
В данном способе показатель достоверности результатов контроля (ПДРК) представляет собой апостериорную вероятность безопасности КЗС после обработки данных от нескольких источников.
Более сложным является случай, когда состояние системы X оценивается по данным контроля, полученным из n источников. Предположим, что все источники обладают одинаковыми качествами по достоверности предоставляемых данных. Тогда для системы с двумя возможными состояниями x1 и x2, предварительные вероятности которых P0(x1), P0(x2) матрица состояний будет следующей:
Совокупность сообщений  , полученная от средств контроля, состоит в том, что поступило определенное число сообщений каждого типа, т.е. из n источников:
, полученная от средств контроля, состоит в том, что поступило определенное число сообщений каждого типа, т.е. из n источников:
Требуется определить окончательные вероятности состояний:
Чтобы применить формулу Бейеса, необходимо определить условные вероятности совокупности сообщений  при каждом из состояний системы:
при каждом из состояний системы:
Представим множество событий  в виде суммы несовместных вариантов:
в виде суммы несовместных вариантов:
A1 - источники с номерами от 1 до n1 предоставили сообщение  ; источники с номерами от n1+1 до n1+n2 - сообщения
; источники с номерами от n1+1 до n1+n2 - сообщения  ; остальные - сообщение
; остальные - сообщение  ;
;
А2 - источники с номерами от 1 до n2 предоставили сообщение  ; источники с номерами от n2+1 до n2+n1 - сообщения
; источники с номерами от n2+1 до n2+n1 - сообщения  ; остальные - сообщение
; остальные - сообщение  и т.д.
и т.д.
Число таких вариантов:
Вероятность каждого варианта определяется следующим образом.
1. При условии, что система находится в состоянии x1:

2. При условии, что система находится в состоянии x2:.

Тогда вероятности состояний системы после получения данных контроля:

Более общим является случай, когда характеристики всех источников данных контроля различны и различны достоверности получаемых от них данных. Исходные данные о достоверности данных для различных источников могут быть получены из опыта путем сбора статистических данных по результатам контроля. Другими способами получения вероятностей  является теоретический расчет, экспертные оценки или имитационное моделирование на ЭВМ.
является теоретический расчет, экспертные оценки или имитационное моделирование на ЭВМ.
Пример расчета.
Для мониторинга обстановки используются три средства контроля (источника информации). Одно из них №1 является более совершенным, и для него матрица, характеризующая достоверность сообщений, имеет вид:
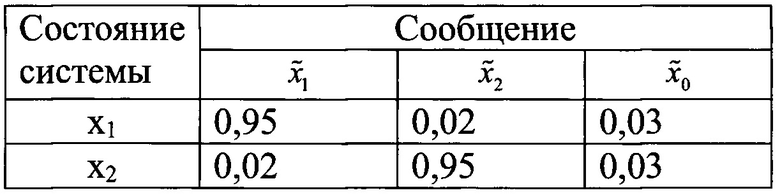
Два других средства №2 и №3 имеют следующие характеристики достоверности сообщений:
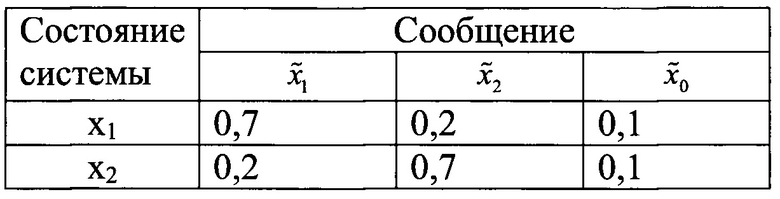
Данные различных средств контроля противоречат друг другу:
Источник №1 передал сообщение  , а источники №2 и №3 - сообщение
, а источники №2 и №3 - сообщение  . Предварительные вероятности состояний объекта контроля (КЗС) следующие:
. Предварительные вероятности состояний объекта контроля (КЗС) следующие:
Необходимо определить какое из сообщений является более правдоподобным.
Решение.
Сообщение  состоит в следующем:
состоит в следующем:

Условные вероятности сообщения  при состояниях x1 и x2 следующие:
при состояниях x1 и x2 следующие:


По формуле Бейеса окончательные вероятности состояний:

Таким образом, несмотря на то, что сообщение  получено из двух источников, а сообщение
получено из двух источников, а сообщение  - только из одного. Хотя состояние x2 представлялось более вероятным, все же после получения данных контроля более вероятным оказывается состояние x1 [1].
- только из одного. Хотя состояние x2 представлялось более вероятным, все же после получения данных контроля более вероятным оказывается состояние x1 [1].
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля и управления информационной безопасностью узлов сети передачи данных | 2020 |
|
RU2748745C1 |
| Способ мониторинга и управления информационной безопасностью подвижной сети связи | 2020 |
|
RU2747368C1 |
| СПОСОБ КОМПЛЕКСНОГО МОНИТОРИНГА СОСТОЯНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И СИСТЕМ | 2020 |
|
RU2759327C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ПОИСКА ПОДВИЖНЫХ АБОНЕНТОВ НА РАЗНОРОДНЫХ СЕТЯХ СВЯЗИ | 2016 |
|
RU2625644C1 |
| Способ мониторинга состояния электрических сетей и сетей связи | 2021 |
|
RU2764656C1 |
| СПОСОБ МОНИТОРИНГА БЕЗОПАСНОСТИ НЕСУЩИХ КОНСТРУКЦИЙ, КОНСТРУКТИВНЫХ ЭЛЕМЕНТОВ ЗДАНИЙ И СООРУЖЕНИЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413193C2 |
| СИСТЕМА ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА АТМОСФЕРНОГО ВОЗДУХА ПРОМЫШЛЕННОГО РЕГИОНА | 2013 |
|
RU2549222C2 |
| СПОСОБ МОНИТОРИНГА БЕЗОПАСНОСТИ АВТОМАТИЗИРОВАННЫХ СИСТЕМ | 2007 |
|
RU2355024C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СКРЫТНОСТИ ФУНКЦИОНИРОВАНИЯ ЭЛЕМЕНТОВ СИСТЕМЫ СВЯЗИ, ИСПОЛЬЗУЮЩЕЙ РЕСУРСЫ СЕТИ СВЯЗИ ОБЩЕГО ПОЛЬЗОВАНИЯ | 2021 |
|
RU2772548C1 |
| Способ обеспечения устойчивого функционирования сложной технической системы | 2022 |
|
RU2815224C1 |
Изобретение относится к области контроля и управления распределенными системами, в частности к способам контроля и управления системой связи. Техническим результатом при использовании заявленного способа является повышение объективности и достоверности контроля состояния системы связи; повышение оперативности и действенности контроля без потери достоверности контроля; обеспечение близкого к реальному времени режима управления безопасностью системы связи. Технический результат достигается с помощью выполнения функций безопасности; за счет совместной обработки данных двух и более средств мониторинга, управления показателями достоверности средств мониторинга, контроля состояния среды (условий) функционирования системы связи, выбора оптимальных режимов работы и расположения мобильных средств мониторинга относительно контролируемых объектов с учетом состояния среды; использования многоуровневой древовидной структуры взаимосвязи средств мониторинга, представления данных мониторинга в матричной форме и поэтапной обработки данных средствами мониторинга соответствующих уровней на основе двоичной логики, прогнозирования последствий инцидентов безопасности. 3 ил.
Способ мониторинга безопасности системы связи (СС), включающей N≥2 контролируемых зон связи (КЗС) (1), средства мониторинга (СМ) (2) в каждой КЗС и центр мониторинга и управления связью (ЦМУС) (3), заключающийся в том, что до начала измерений формируют в ЦМУС (3) для каждого СМ (2) блокматрицы-задания (БМЗ), содержащие совокупность измерительных модулей (ИМ) и контролируемых параметров (КП), а также границы интервалов допустимых значений КП, передают по каналам связи и вводят БМЗ в СМ (2), устанавливают заданные параметры СМ (2), измеряют и оценивают численные значения КП, формируют матрицу оцененных значений КП (МОЗКП) (11), вычисляют значения частных показателей безопасности (ЧПБ), формируют матрицу частных показателей безопасности (МЧПБ) (12), вычисляют значения обобщенных показателей безопасности (ОПБ), формируют матрицу обобщенных показателей безопасности (МОПБ) (14), отображают на индикационном поле СМ (2) значения ЧПБ и ОПБ КЗС (1), формируют в СМ (2) и передают в ЦМУС (3) сообщение с МОПБ (14) с помощью аппаратуры приема-передачи данных, принимают в ЦМУС (3), преобразуют и представляют в предварительно заданной форме полученные данные, отличающийся тем, что в ЦМУС (3) формируют СС в виде многоуровневой вложенной структуры КЗС с количеством уровней вложенности ψ≥3 и N≥1 КЗСn первого уровня (1), где n=1,2…N, М≥1 КЗСm второго уровня (4), где m=1,2…М, К≥1 КЗСk третьего уровня (5), где k=1,2…K, L≥1 KЗC1 четвертого уровня (6), где  , изменяют состав средств мониторинга в КЗС с помощью Z≥1 арбитражных средств мониторинга (АСМ) (7), присваивают СМ (2) и КЗС адрес (
, изменяют состав средств мониторинга в КЗС с помощью Z≥1 арбитражных средств мониторинга (АСМ) (7), присваивают СМ (2) и КЗС адрес ( ), а АСМ (7) присваивают адрес (z), формируют до начала измерений в СМ (2) матрицы связности корреспондентов (МСК) (8) между i-м и j-м корреспондентами связи, где i=1,2…I, I≥2, j=1,2…J, J≥2, i≠j, матрицы регламентов функций безопасности (МРФБ) (9) и матрицы показателей достоверности средств мониторинга (МПДСМ) (10), задают в ЦМУС (3) допустимое значение совокупной ошибки оценки состояния КЗС (Рош доп) и базу типовых инцидентов безопасности (ИБ), а после измерений и оценки значений КП в СМ (2) формируют для каждой ij-й связи из МСК (8) матрицу оцененных значений КП (МОЗКП) (11), вычисляют значения частных показателей безопасности (ЧПБ) Сij, оценивают временные интервалы (Тr ij) и последовательность выполнения
), а АСМ (7) присваивают адрес (z), формируют до начала измерений в СМ (2) матрицы связности корреспондентов (МСК) (8) между i-м и j-м корреспондентами связи, где i=1,2…I, I≥2, j=1,2…J, J≥2, i≠j, матрицы регламентов функций безопасности (МРФБ) (9) и матрицы показателей достоверности средств мониторинга (МПДСМ) (10), задают в ЦМУС (3) допустимое значение совокупной ошибки оценки состояния КЗС (Рош доп) и базу типовых инцидентов безопасности (ИБ), а после измерений и оценки значений КП в СМ (2) формируют для каждой ij-й связи из МСК (8) матрицу оцененных значений КП (МОЗКП) (11), вычисляют значения частных показателей безопасности (ЧПБ) Сij, оценивают временные интервалы (Тr ij) и последовательность выполнения  функций безопасности (ФБ), вычисляют показатели своевременности функций безопасности (ПСФБ) (Vr ij) и обобщенные Wij показатели безопасности (ОПБ), а также значения Рij показателей достоверности результатов контроля (ПДРК), формируют для каждой ij-й связи матрицы частных показателей безопасности (МЧПБij) (12), матрицы своевременности функций безопасности (МСФБij) (13), формируют для каждой КЗС матрицу обобщенных показателей безопасности (МОПБ) (14), матрицу показателей достоверности результатов контроля (МПДРК) (15) и матрицу состояния среды (МСС) (16), при отсутствии ИБ передают на СМ (2) вышестоящего уровня в сообщении (17) адрес СМ (2), МСК (8) и МСС (16), а при обнаружении ИБ в ij-й связи или по сигналу от вышестоящего СМ (2) включают сигнализацию на индикационном поле СМ (2), дополнительно в сообщении (19) на СМ (2) вышестоящего уровня передают МОПБ (14), МПДРК (15), МЧПБij (12), МСФБij (13), принимают сообщения (17), (19) на СМ (2) вышестоящего уровня, где формируют сводные МСК (8), МСС (16), МОПБ (14), МПДРК (15), передают сообщения от СМ (2) первого уровня и АСМ (7) в ЦМУС (3), причем при отсутствии ИБ в сообщении (18) от АСМ (7) передают его адрес (z), адрес КЗС (), МСК (8) и МСС (16), а при обнаружении ИБij в ij-й связи или по сигналу от ЦМУС (3) в сообщении (20) от АСМ (7) дополнительно передают МОПБ (14), МЧПБij (12) и МСФБу (13), принимают в ЦМУС (3) сообщения от СМ (2) первого уровня и АСМ (7), формируют сводные по СС МСК (8), МОПБ (14), МПДРК (15), МСС (16), сравнивают в ЦМУС (3) сводные МСК (8) и МСС (16), по показателям которых определяют КЗС с наиболее сложными условиями для контроля, формируют в ЦМУС (3) и передают управляющие сигналы по позиционированию АСМ (7) в пределах КЗС и режимам работы для обеспечения оптимальных условий контроля, классифицируют в ЦМУС (3) обнаруженные ИБij путем сравнения соответствующей МЧПБij (12) с базой типовых ИБ, категорируют ИБij в ЦМУС (3) путем оценки критичности последствий нарушений регламента выполнения ФБ ij-й связи для безопасности СС и отображают результаты классификации и категорирования на индикационном поле ЦМУС (3), формируют в ЦМУС (3), АСМ (7), СМ (2) вышестоящего уровня и передают в СМ (2) нижестоящего уровня управляющие сигналы для обработки ИБij, принимают и отображают на индикационном поле СМ (2) управляющие сигналы для обработки ИБij в соответствующей КЗС, вычисляют в ЦМУС (3) значения статистических показателей достоверности (Рош) сообщений от СМ (2), сравнивают их с допустимым значением совокупной ошибки (Рош доп) оценки безопасности КЗС, формируют и отображают сообщение о неисправности СМ (2) при превышении заданного допустимого значения совокупной ошибки (Рош доп), формируют новую МПДСМ (10), которую дополнительно в составе БМЗ передают по каналам связи и вводят в соответствующее СМ (2).
функций безопасности (ФБ), вычисляют показатели своевременности функций безопасности (ПСФБ) (Vr ij) и обобщенные Wij показатели безопасности (ОПБ), а также значения Рij показателей достоверности результатов контроля (ПДРК), формируют для каждой ij-й связи матрицы частных показателей безопасности (МЧПБij) (12), матрицы своевременности функций безопасности (МСФБij) (13), формируют для каждой КЗС матрицу обобщенных показателей безопасности (МОПБ) (14), матрицу показателей достоверности результатов контроля (МПДРК) (15) и матрицу состояния среды (МСС) (16), при отсутствии ИБ передают на СМ (2) вышестоящего уровня в сообщении (17) адрес СМ (2), МСК (8) и МСС (16), а при обнаружении ИБ в ij-й связи или по сигналу от вышестоящего СМ (2) включают сигнализацию на индикационном поле СМ (2), дополнительно в сообщении (19) на СМ (2) вышестоящего уровня передают МОПБ (14), МПДРК (15), МЧПБij (12), МСФБij (13), принимают сообщения (17), (19) на СМ (2) вышестоящего уровня, где формируют сводные МСК (8), МСС (16), МОПБ (14), МПДРК (15), передают сообщения от СМ (2) первого уровня и АСМ (7) в ЦМУС (3), причем при отсутствии ИБ в сообщении (18) от АСМ (7) передают его адрес (z), адрес КЗС (), МСК (8) и МСС (16), а при обнаружении ИБij в ij-й связи или по сигналу от ЦМУС (3) в сообщении (20) от АСМ (7) дополнительно передают МОПБ (14), МЧПБij (12) и МСФБу (13), принимают в ЦМУС (3) сообщения от СМ (2) первого уровня и АСМ (7), формируют сводные по СС МСК (8), МОПБ (14), МПДРК (15), МСС (16), сравнивают в ЦМУС (3) сводные МСК (8) и МСС (16), по показателям которых определяют КЗС с наиболее сложными условиями для контроля, формируют в ЦМУС (3) и передают управляющие сигналы по позиционированию АСМ (7) в пределах КЗС и режимам работы для обеспечения оптимальных условий контроля, классифицируют в ЦМУС (3) обнаруженные ИБij путем сравнения соответствующей МЧПБij (12) с базой типовых ИБ, категорируют ИБij в ЦМУС (3) путем оценки критичности последствий нарушений регламента выполнения ФБ ij-й связи для безопасности СС и отображают результаты классификации и категорирования на индикационном поле ЦМУС (3), формируют в ЦМУС (3), АСМ (7), СМ (2) вышестоящего уровня и передают в СМ (2) нижестоящего уровня управляющие сигналы для обработки ИБij, принимают и отображают на индикационном поле СМ (2) управляющие сигналы для обработки ИБij в соответствующей КЗС, вычисляют в ЦМУС (3) значения статистических показателей достоверности (Рош) сообщений от СМ (2), сравнивают их с допустимым значением совокупной ошибки (Рош доп) оценки безопасности КЗС, формируют и отображают сообщение о неисправности СМ (2) при превышении заданного допустимого значения совокупной ошибки (Рош доп), формируют новую МПДСМ (10), которую дополнительно в составе БМЗ передают по каналам связи и вводят в соответствующее СМ (2).
| Способ комплексного мониторинга и управления состоянием многопараметрических объектов | 2016 |
|
RU2627242C1 |
| СПОСОБ КОМПЛЕКСНОГО КОНТРОЛЯ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО РАЗНОРОДНОЙ ИНФОРМАЦИИ | 2011 |
|
RU2459245C1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ ВОЕННЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2321175C1 |
| СПОСОБ КОМПЛЕКСНОГО МОНИТОРИНГА СОСТОЯНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И СИСТЕМ | 2014 |
|
RU2574083C2 |
| US 6778865 B1, 17.08.2004. | |||

